CC雷达基数据格式说明(附函数)
8.天气雷达基数据标准格式(v1.0)
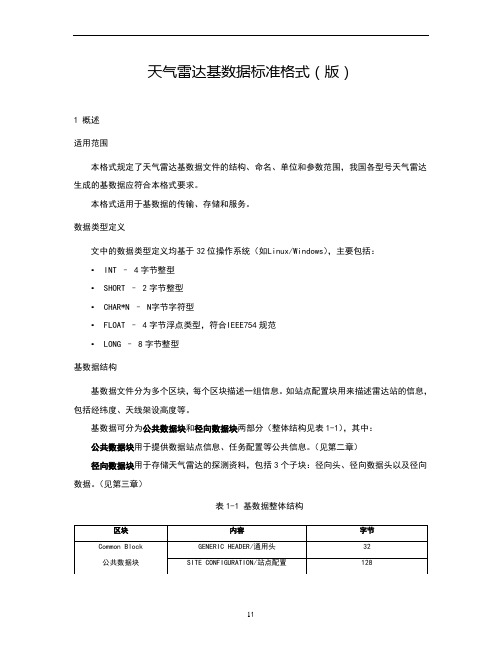
天气雷达基数据标准格式(V1.0版)1 概述1.1适用范围本格式规定了天气雷达基数据文件的结构、命名、单位和参数范围,我国各型号天气雷达生成的基数据应符合本格式要求。
本格式适用于基数据的传输、存储和服务。
1.2数据类型定义文中的数据类型定义均基于32位操作系统(如Linux/Windows),主要包括:• INT – 4字节整型• SHORT – 2字节整型• CHAR*N – N字节字符型• FLOAT – 4字节浮点类型,符合IEEE754规范• LONG – 8字节整型1.3基数据结构基数据文件分为多个区块,每个区块描述一组信息。
如站点配置块用来描述雷达站的信息,包括经纬度、天线架设高度等。
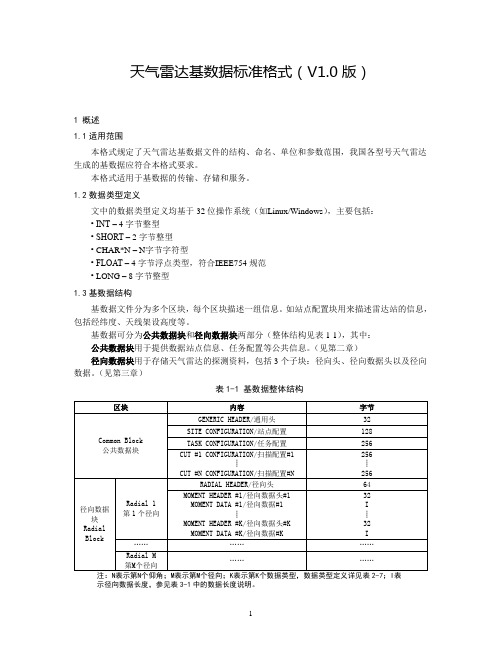
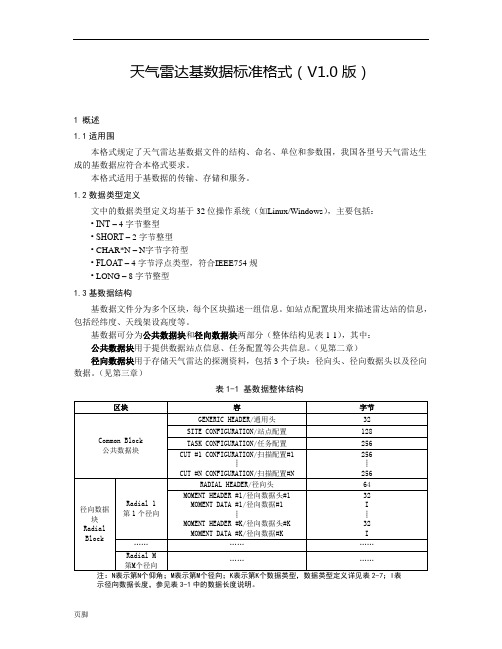
基数据可分为公共数据块和径向数据块两部分(整体结构见表1-1),其中:公共数据块用于提供数据站点信息、任务配置等公共信息。
(见第二章)径向数据块用于存储天气雷达的探测资料,包括3个子块:径向头、径向数据头以及径向数据。
(见第三章)表1-1 基数据整体结构示径向数据长度,参见表3-1中的数据长度说明。
2 公共数据块公共数据块用于描述数据采集所需的参数,如雷达站点信息和任务配置参数等。
详细描述见表2-1。
2.1 通用头块通用头块用于标识文件的类别,内容主要包括文件格式版本、文件类型等信息,共32字节。
见表2-2。
2.2 站点配置块站点配置块用于描述雷达站信息,共128字节。
详见表2-3。
表 2-3 站点配置块2.4 任务配置块任务配置块提供雷达扫描任务一般信息,主要包括PPI、RHI以及扇扫等,共256字节。
详见表2-4。
2.5 扫描配置块扫描配置块提供具体扫描配置信息,每扫描配置块由256字节组成。
详见表2-5。
对于扫描任务来说,通常包括不止一个仰角或方位角,多个扫描的配置块依次排列在任务配置块后面。
3 径向数据块3.1 径向头块径向头块提供数据状态、采集时间等信息,共64字节,详见表3-1。
3.2 径向数据块径向数据块用来存储雷达探测的径向数据资料,如反射率Z、径向速度V以及谱宽W等。
雷达数据的产生和处理(附代码下载)

雷达数据的产生和处理(附代码下载)
视频中为了解释数据立方体的产生,使用了一个实例来说明,具体代码我们也给大家找到了,仅供学习参考,其中参数可以自行改变,以适应你自己的仿真需求。
相控阵系统工具箱为雷达、无线通信和医疗成像应用中的传感器阵列系统的设计、仿真和分析提供算法和应用程序。
工具箱包含脉冲和连续波形以及用于波束成形、匹配滤波、到达方向(DOA)估计和目标检测的信号处理算法。
还包括发射机和接收机、传播、目标、干扰器和杂波的模型。
在实际中,通常使用大于奈奎斯特采样率的速度对快时间维信号(单个脉冲)进行采样,形成雷达数据立方体中的一条记录。
雷达的多个阵元可同时接收到多个通道的数据。
图1:快时间维,单个脉冲的采样点图2:增加多个阵元的接收通道数据一般雷达发射的是周期性脉冲序列,雷达很多情况下会以M个脉冲为一组进行处理,称为相参处理时间(CPI),一个CPI内的数据采集通常会使用固定的PRI和雷达频率,并且具有相同的雷达波形。
图3:增加多个脉冲的慢时间维数据因此,N个通道,单个脉冲的L个采样点,M个脉冲组成了上述的一个雷达数据立方体,通过对这个数据立方体的处理,可以获得目标的距离、速度和方位信息。
下面使用仿真的数据,来设计相控阵系统并分析其在不同场景下的性能。
视频中举了2个例子:1. 具有单个雷达目标的8阵元均匀线性阵列;2. 安装在球体表面的121个阵元的阵列,有20个目标。
下面是代码仿真结果(第2种较复杂的情况):图4:第2种情况的仿真结果上面视频中的介绍是产生了雷达数据立方体,那如何进行处理,从而得到目标的距离、速度和方位信息,那要如何处理呢?且看下面视频:。
CC雷达基数据格式说明(附函数)

CINRAD/CC/CCJ雷达原始数据格式声明:本数据格式适用CINRAD/CC和CINRAD/CCJ.安徽四创电子股份有限公司保留最终解释权.本文档仅供内部交流,请不要发表.文件名:平扫(PPI):NNNNYYDDHH.MMP高扫(RHI):NNNNYYDDHH.MMR体扫(VPPI):NNNNYYDDHH.MMV单库FFT:NNNNYYDDHH.MMF等高PPI(CAPPI):NNNNYYDDHH.MMCN:年Y:月D:日H:时M:分数据组成:整个数据由文件头(1个)和基于极坐标系的原始数据(512个径向)组成.文件头:////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////tagWEATHERRADAR雷达信息的结构typedef struct tagWEATHERRADAR{char cFileType[16]; //3830数据标识(CINRADC)char cCountry[30]; //国家名char cProvince[20]; //省名char cStation[40]; //站名char cStationNumber[10]; //区站号char cRadarType[20]; //雷达型号char cLongitude[16]; //天线所在经度char cLatitude[16]; //天线所在纬度long lLongitudeValue; //具体经度long lLatitudeValue; //具体纬度long lHeight; //天线海拔高度short sMaxAngle; //地物阻挡最大仰角short sOptAngle; //最佳观测仰角unsigned char ucSYear1; //观测开始时间的年千百位(19-20)unsigned char ucSYear2; //观测开始时间的年十个位(00-99)unsigned char ucSMonth; //观测开始时间的月(1-12)unsigned char ucSDay; //观测开始时间的日(1-31)unsigned char ucSHour; //观测开始时间的时(0-23)unsigned char ucSMinute; //观测开始时间的分(0-59)unsigned char ucSSecond; //观测开始时间的秒(0-59)unsigned char ucTimeFrom; //时间来源0-计算机时钟(1天内未对时)// 1-计算机时钟(1天内已对时)// 2-GPS// 3-其它unsigned char ucEYear1; //观测结束时间的年千百位(19-20)unsigned char ucEYear2; //观测结束时间的年十个位(00-99)unsigned char ucEMonth; //观测结束时间的月(1-12)unsigned char ucEDay; //观测结束时间的日(1-31)unsigned char ucEHour; //观测结束时间的时(0-23)unsigned char ucEMinute; //观测结束时间的分(0-59)unsigned char ucESecond; //观测结束时间的秒(0-59)unsigned char ucScanMode; //扫描方式1-RHI// 10-PPI和ZPPI// 1XX=VPPI(XX为扫描圈数) unsigned long ulSmilliSecond; //以微秒为单位表示的秒的小数位unsigned short usRHIA; //RHI所在的方位角(0.01度为单位)// PPI和VPPI时为FFFFshort sRHIL; //RHI所在的最低仰角(0.01度为单位)//PPI和VPPI时为FFFFshort sRHIH; //RHI所在的最高仰角(0.01度为单位)//PPI和VPPI时为FFFFunsigned short usEchoType; //回波类型0x405a-Z 0x406a-V 0x407a-W// 0x408a-ZVW三要素unsigned short usProdCode; //数据类型0x8001-PPI数据0x8002-RHI数据// 0x8003-VPPI数据0x8004-单强度PPI数据// 0x8005-CAPPI数据unsigned char ucCalibration; //标校状态0-无1-自动2-1星期内人工// 3-1月内人工unsigned char remain1[3]; //保留字unsigned char remain2[660]; //保留字,放VPPISCANPARAMETER数据//该结构的说明见后long lAntennaG; //天线增益(0.001dB)long lPower; //峰值功率(瓦)long lWavelength; //波长(微米)unsigned short usBeamH; //垂直波束宽度(秒)unsigned short usBeamL; //水平波束宽度(秒)unsigned short usPolarization; //极化状态0-水平1-垂直2-双偏振// 3-圆偏振4-其它unsigned short usLogA; //对数动态范围(0.01dB)unsigned short usLineA; //线性动态范围(0.01dB)unsigned short usAGCP; //AGC延迟量(微秒)unsigned short usFreqMode; //频率方式1-单重复频率2-双重复频率3:2// 3-双重复频率4:3unsigned short usFreqRepeat; //重复频率unsigned short usPPPPulse; //PPP脉冲数unsigned short usFFTPoint; //FFT间隔点数unsigned short usProcessType; //信号处理方式1-PPP 2-全程FFT// 3-单库FFTunsigned char ucClutterT; //杂波消除阀值(即STC)char cSidelobe; //第一旁瓣(dB)unsigned char ucVelocityT; //速度门限unsigned char ucFilderP; //地物消除方式0-无1-IIR滤波器1// 2-IIR滤波器2 3-IIR滤波器3// 4-IIR滤波器4unsigned char ucNoiseT; //噪声消除阀值(即强度门限)unsigned char ucSQIT; //SQI门限unsigned char ucIntensityC; //DVIP强度值估算采用的通道// 1-对数通道2-线性通道unsigned char ucIntensityR; //强度值估算是否距离订正// 0-无(dB) 1-已订正(dBZ)unsigned char ucCalNoise; //噪声系数标定值unsigned char ucCalPower; //发射功率标定值unsigned char ucCalPulseWidth; //脉冲宽度标定值unsigned char ucCalWorkFreq; //工作频率标定值unsigned char ucCalLog; //对数斜率标定值char remain3[92]; //保留字unsigned long int liDataOffset; //数据偏移地址}WEATHERRADAR;//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////tagVPPISCANPARAMETER仰角层的结构typedef struct tagVPPISCANPARAMETER{unsigned short usMaxV; //最大可测速度(厘米/秒)unsigned short usMaxL; //最大可测距离(10米)unsigned short usBindWidth; //库长(米)unsigned short usBinNumber; //每径向库数unsigned short usRecordNumber; //本圈径向数unsigned short usArotate; //本圈转速(0.01度/秒)unsigned short usPrf1; //本圈第一次重复频率(0.1Hz)对应单重频或双重频的高者unsigned short usPrf2; //本圈第二次重复频率(0.1Hz)对应双重频的低者unsigned short usSpulseW; //本圈脉宽(微秒)short usAngle; //仰角(0.01度)unsigned char cSweepStatus; //1=单要素2=三要素(单重频) 3=三要素(双重频) unsigned char cAmbiguousp; //0=无软件退模糊1=软件退模糊}VPPISCANPARAMETER;//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////注:在WEATHERRADAR结构的remain2处填写了的VPPISCANPARAMETER;结构表明本仰角层的参数(对PPI和VPPI而言)或其他含义(对RHI和单库FFT文件而言)VPPI有几层填几个,PPI RHI FFT数据只填写一层即一个.原始数据:PPI RHI VPPI的数据排列如下:第0个径向的数据:Z(字)500个V(字)500个W(字)500个….….第512个径向的数据:Z(字)500个V(字)500个W(字)500个注: Z V W均为16位的字型数据(在C语言中用short int 有符整型) 所读出的值除以10得到一个小数就是最终的值.Z以dBz为单位V W均以m/s为单位读出的数据如果是0x8000,说明此处无回波.这样做的目的是为了必须区别回波强度为0和无回波.单库FFT数据排列如下:当为256点时:256个通道的功率值(字型单位:dB)当为128点时:128个通道的功率值(字型单位:dB)附函数段:////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////检查要打开的文件//filename:文件名CString CRadar::CheckData(CString filename){CFile *fp;CString str="INV ALID",error,tempfilename=filename;try{fp=new CFile(filename,CFile::modeRead);}catch(CFileException* e){ProcessFileError(e,1);return str;}WEATHERRADAR tempinfo;fp->SeekToBegin();fp->Read(&tempinfo,sizeof(WEATHERRADAR));if(strcmp(tempinfo.cFileType,"CINRADC")){error.Format("%s 不是3830雷达数据文件!",tempfilename);AfxMessageBox(error,MB_OK|MB_ICONSTOP);delete fp;return str;}if(ProdCode==0x8001) str="PPI";else if(ProdCode==0x8002) str="RHI";else if(ProdCode==0x8003) str="VPPI";else if(ProdCode==0x8004) str="ZPPI";else if(ProdCode==0x8005) str="CAPPI";else if(ProdCode==0x8006) str="FFT";else{error.Format("文件%s 不是3830雷达数据文件!",tempfilename);AfxMessageBox(error,MB_OK|MB_ICONSTOP);}delete fp;return str;}//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //读取数据//filename:要打开的文件名BOOL CPPI::LoadData(CString filename){CFile *fp;CString str;try{fp=new CFile(filename,CFile::modeRead);}catch(CFileException* e){radar->ProcessFileError(e,1);return FALSE;}fp->SeekToBegin();fp->Read(&info,sizeof(WEATHERRADAR));fp->Seek(218L,CFile::begin);fp->Read(&vppipara,sizeof(VPPISCANPARAMETER));rmax=int(MaxL/100.0+0.5);scanyj=Angle/100.0;//装地图文件long l;//申请数据存储区hData=::GlobalAlloc(GHND,512L*1500L*2L);if(!hData){AfxMessageBox("内存不足",MB_OK|MB_ICONSTOP);::GlobalFree(hData);delete fp;return FALSE;}pData=(short*)::GlobalLock(hData);for(l=0;l<(512*1500);l++) pData[l]=short(0x8000); //程序中用来表示有无数据,可以//不用考虑fp->Seek(info.liDataOffset,CFile::begin);int i,BEGINPOS,angle;long pos;short tempData[500];//我的程序要把每一个径向的连续的ZVW数据块读出后再按每个点排列成//第1个点的Z V W 第2个点的Z V W …. /第500个点的Z V W//可以不用考虑if(radar->scanmode=="PPI"){for(angle=0;angle<512;angle++){for(BEGINPOS=0;BEGINPOS<=2;BEGINPOS++){fp->Read(tempData,500L*2);pos=long(angle*1500+BEGINPOS);for(i=0;i<500;i++){pData[pos]=tempData[i];pos+=3;}}}}else if(radar->scanmode=="ZPPI"){for(angle=0;angle<512;angle++){fp->Read(tempData,500L*2);pos=long(angle*1500+0);for(i=0;i<500;i++){pData[pos]=tempData[i];pos+=3;}}}delete fp;openfilename=filename;return TRUE;}//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //读取数据//filename:要打开的文件名BOOL CRHI::LoadData(CString filename){CFile *fp;CString str;try{fp=new CFile(filename,CFile::modeRead);}catch(CFileException* e){radar->ProcessFileError(e,1);return FALSE;}fp->SeekToBegin();fp->Read(&info,sizeof(WEATHERRADAR));fp->Seek(218L,CFile::begin);fp->Read(&vppipara,sizeof(VPPISCANPARAMETER));rmax=int(MaxL/100);scanfw=RHIA/100.0;beginyj=info.sRHIL/100.0;endyj=info.sRHIH/100.0;hData=::GlobalAlloc(GHND,512L*1500L*2L);if(!hData){AfxMessageBox("内存不足",MB_OK|MB_ICONSTOP);::GlobalFree(hData);delete fp;return FALSE;}pData=(short*)::GlobalLock(hData);long l;for(l=0;l<(512*1500);l++) pData[l]=short(0x8000);fp->Seek(info.liDataOffset,CFile::begin);int i,BEGINPOS,angle;long pos;short tempData[500];for(angle=0;angle<512;angle++){for(BEGINPOS=0;BEGINPOS<=2;BEGINPOS++){fp->Read(tempData,500L*2);pos=long(angle*1500+BEGINPOS);for(i=0;i<500;i++){pData[pos]=tempData[i];pos+=3;}}}delete fp;openfilename=filename;if(pDC||pmemDC||pbackDC) ChangeDistanceOrHeight(rmax,hmax);return TRUE;}//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //读取数据//filename:要打开的文件名BOOL CVPPI::LoadData(CString filename){// if(radar->IsZip) filename=radar->unzipfile;CFile *fp;CString str;try{fp=new CFile(filename,CFile::modeRead);}catch(CFileException* e){radar->ProcessFileError(e,1);return FALSE;}fp->SeekToBegin();fp->Read(&info,sizeof(WEATHERRADAR));fp->Seek(218L,CFile::begin);ScanPara->num=info.ucScanMode-100;int yjc,temprf1,temprf2;for(yjc=0;yjc<ScanPara->num;yjc++){fp->Read(&vppipara[yjc],sizeof(VPPISCANPARAMETER));ScanPara->yj[yjc]=float(vppipara[yjc].usAngle/100.0);temprf1=int(vppipara[yjc].usPrf1/10.0+0.5);temprf2=int(vppipara[yjc].usPrf2/10.0+0.5);ScanPara->dsp.frequency=temprf1;if((temprf1*1.0/temprf2)==(3.0/2.0)) ScanPara->dsp.freqctrl=2;else if((temprf1*1.0/temprf2)==(4.0/3.0)) ScanPara->dsp.freqctrl=3;else ScanPara->dsp.freqctrl=1;ScanPara->dsp.pulsewidth=vppipara[yjc].usSpulseW;}rmax=int(vppipara[0].usMaxL/100);long l;//申请数据存储区hData=::GlobalAlloc(GHND,512L*1500L*2L*ScanPara->num);if(!hData){AfxMessageBox("内存不足",MB_OK|MB_ICONSTOP);::GlobalFree(hData);delete fp;return FALSE;}pData=(short*)::GlobalLock(hData);for(l=0;l<(ScanPara->num*512*1500);l++) pData[l]=short(0x8000);//因为pData中存放的是处理后的数据(有0),为了区分无回波和0,规定无回波0x8000=-32768, //0=0fp->Seek(info.liDataOffset,CFile::begin);int i,BEGINPOS,angle;long pos;short tempData[500];for(yjc=0;yjc<ScanPara->num;yjc++)for(angle=0;angle<512;angle++){for(BEGINPOS=0;BEGINPOS<=2;BEGINPOS++){fp->Read(tempData,500L*2);pos=long(yjc*1500*512+angle*1500+BEGINPOS);for(i=0;i<500;i++){pData[pos]=tempData[i];pos+=3;}}}delete fp;openfilename=filename;curyjc=0;return TRUE;}//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //读取数据//filename:要打开的文件名BOOL CFFT::LoadData(CString filename){// if(radar->IsZip) filename=radar->unzipfile;CFile *fp;CString str;try{fp=new CFile(filename,CFile::modeRead);}catch(CFileException* e){radar->ProcessFileError(e,1);return FALSE;}fp->SeekToBegin();fp->Read(&info,sizeof(WEATHERRADAR));fp->Seek(218L,CFile::begin);fp->Read(&vppipara,sizeof(VPPISCANPARAMETER));rmax=int(MaxL/100.0+0.5);TESTPoints=int(Arotate);scanfw=Angle/100.0;oldFFTPoints=FFTPoint;fp->Seek(info.liDataOffset,CFile::begin);fp->Read(linedata.data,256L*2);delete fp;openfilename=filename;ChangeFFTPoints(oldFFTPoints);return TRUE;}//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////。
中国气象局风廓线雷达通用数据格式(V1.2)

风廓线雷达通用数据格式(V1.2)2007年9月目录1. 文件名编码规则 (3)1.1 原始数据文件 (3)1.2 产品数据文件 (3)2.功率谱数据文件 (4)3. 径向数据文件 (4)3.1 文件组成单位 (4)3.2 文件框架 (4)3.3 文件结构 (6)4. 实时的采样高度上的产品数据文件 (10)4.1 文件组成单位 (10)4.2 文件框架 (10)4.3 文件结构 (10)5. 半小时平均的采样高度上的产品数据文件 (12)5.1 文件组成单位 (12)5.2 文件框架 (12)5.3 文件结构 (12)6. 一小时平均的采样高度数据文件 (13)6.1 文件组成单位 (13)6.2 文件框架 (13)6.3 文件结构 (13)附件一功率谱数据格式 (15)1. 文件名编码规则根据实际需求,建议使用长文件名命名法,对各类文件名进行约定。
文件名中的观测时间均为观测结束时间。
1.1 原始数据文件原始数据文件包括功率谱数据文件、瞬时径向谱数据文件,对于原始数据文件,建议每次观测生成一个文件,文件名具体命名方法如下:Z_RADR_I _IIiii_yyyyMMddhhmmss_O_WPRD_雷达型号_数据类型.TTT 其中:Z:国内交换文件;RADR:表示雷达资料;I:表示后面的IIiii为风廓线雷达站的区站号;IIiii:区站号(按地面气象站的区站号);yyyy:观测时间(年) (20**—);MM:观测时间(月) (01—12);dd:观测时间(日) (01—31);hh:观测时间(时) (00—23);mm:观测时间(分) (00—59);ss:观测时间(秒) (00—59);O:表示观测数据;WPRD:表示风廓线雷达资料;雷达型号:见表1;数据类型:功率谱数据文件用FFT表示;径向数据文件用RAD表示;TTT:当TTT = BIN时,表示二进制文件;当TTT = TXT时,表示文件格式为ASCII。
新一代可移式C波段多普勒天气雷达阵地架设要求

新一代可移式C波段多普勒天气雷达架设阵地要求为保障雷达工作状态的持续性及稳定性,充分发挥雷达的探测性能,按照设备工作要求选择合适的雷达阵地是雷达架设的首要条件。
本要求介绍了新一代可移式C波段多普勒天气雷达(以下简称CCJ雷达)的设备组成并提出了该型雷达架设阵地的主要技术要求。
本要求适用于CCJ雷达架设阵地的选择和建设。
1.设备组成CCJ雷达主要由I号单元(雷达设备方舱)、II号单元(操作方舱)及III号单元(电站方舱)等三部分组成。
其外型及质量参数如下表:2.阵地要求1.通往阵地的道路和桥梁允许雷达运输车通过。
进入阵地的道路宽度不小于3米,允许最小转弯直径24米的车辆通过。
桥梁、涵洞的通过高度不小于4.3米,车辆通过桥梁的承重不小于20吨。
2.阵地四周空旷,在主观测方向上天线中心的水平仰角0.5º以上无建筑物、高大树林、山峰等阻挡。
阵地附近无大功率电磁干扰源,如雷达、发射塔、发电厂等。
3.阵地地面平整、结实,不得有大的坑洼和沟坎,不易积水。
倾斜度小于1°,建议选择一块40m×20m的开阔平坦的水泥地面或硬化场地。
4.阵地预留雷达设备接地地桩,接地电阻小于2Ω。
5.架设避雷针要离开雷达天线中心的距离要大于10米以上。
避雷针的安装应符合国家防雷的相关要求和标准,其接地网不能与雷达设备的整体接地网相连。
6.阵地应提供380V/50Hz工作电源,雷达整机功耗不大于15KW,建议常用阵地配备30KVA以上UPS。
7.在I号单元附近的地面上设置缆绳固定锚点,在雷达长期工作或遇到大风时,将I号单元用防风缆绳固定。
8.尽量将II号单元远离III号单元(油机方舱),以降低III号单元对II号单元(操作方舱)的噪声影响。
3.雷达主要技术指标1.雷达系统工作频率点:5410MHz、5430MHz、5450MHz、5470MHz、5490MHz中的一个频率点;如果需要使用5310MHz、5330MHz、5350MHz、5370MHz、5390MHz中的任意一个频率点,雷达需要更换另外一种型号的速调管;3.雷达分系统主要技术、性能指标:。
8.天气雷达基数据标准格式(v1.0)

天气雷达基数据标准格式(V1.0版)1 概述1.1适用范围本格式规定了天气雷达基数据文件的结构、命名、单位和参数范围,我国各型号天气雷达生成的基数据应符合本格式要求。
本格式适用于基数据的传输、存储和服务。
1.2数据类型定义文中的数据类型定义均基于32位操作系统(如Linux/Windows),主要包括:• INT – 4字节整型• SHORT – 2字节整型• CHAR*N – N字节字符型• FLOAT – 4字节浮点类型,符合IEEE754规范• LONG – 8字节整型1.3基数据结构基数据文件分为多个区块,每个区块描述一组信息。
如站点配置块用来描述雷达站的信息,包括经纬度、天线架设高度等。
基数据可分为公共数据块和径向数据块两部分(整体结构见表1-1),其中:公共数据块用于提供数据站点信息、任务配置等公共信息。
(见第二章)径向数据块用于存储天气雷达的探测资料,包括3个子块:径向头、径向数据头以及径向数据。
(见第三章)表1-1 基数据整体结构示径向数据长度,参见表3-1中的数据长度说明。
2 公共数据块公共数据块用于描述数据采集所需的参数,如雷达站点信息和任务配置参数等。
详细描述见表2-1。
2.1 通用头块通用头块用于标识文件的类别,内容主要包括文件格式版本、文件类型等信息,共32字节。
见表2-2。
2.2 站点配置块站点配置块用于描述雷达站信息,共128字节。
详见表2-3。
表 2-3 站点配置块2.4 任务配置块任务配置块提供雷达扫描任务一般信息,主要包括PPI、RHI以及扇扫等,共256字节。
详见表2-4。
2.5 扫描配置块扫描配置块提供具体扫描配置信息,每扫描配置块由256字节组成。
详见表2-5。
对于扫描任务来说,通常包括不止一个仰角或方位角,多个扫描的配置块依次排列在任务配置块后面。
3 径向数据块3.1 径向头块径向头块提供数据状态、采集时间等信息,共64字节,详见表3-1。
3.2 径向数据块径向数据块用来存储雷达探测的径向数据资料,如反射率Z、径向速度V以及谱宽W等。
8.天气雷达基数据标准格式(v1.0)
天气雷达基数据标准格式(V1.0版)1 概述1.1适用围本格式规定了天气雷达基数据文件的结构、命名、单位和参数围,我国各型号天气雷达生成的基数据应符合本格式要求。
本格式适用于基数据的传输、存储和服务。
1.2数据类型定义文中的数据类型定义均基于32位操作系统(如Linux/Windows),主要包括:• INT – 4字节整型• SHORT – 2字节整型• CHAR*N – N字节字符型• FLOAT – 4字节浮点类型,符合IEEE754规• LONG – 8字节整型1.3基数据结构基数据文件分为多个区块,每个区块描述一组信息。
如站点配置块用来描述雷达站的信息,包括经纬度、天线架设高度等。
基数据可分为公共数据块和径向数据块两部分(整体结构见表1-1),其中:公共数据块用于提供数据站点信息、任务配置等公共信息。
(见第二章)径向数据块用于存储天气雷达的探测资料,包括3个子块:径向头、径向数据头以及径向数据。
(见第三章)表1-1 基数据整体结构示径向数据长度,参见表3-1中的数据长度说明。
2 公共数据块公共数据块用于描述数据采集所需的参数,如雷达站点信息和任务配置参数等。
详细描述见表2-1。
2.1 通用头块通用头块用于标识文件的类别,容主要包括文件格式版本、文件类型等信息,共32字节。
见表2-2。
2.2 站点配置块站点配置块用于描述雷达站信息,共128字节。
详见表2-3。
表 2-3 站点配置块2.4 任务配置块任务配置块提供雷达扫描任务一般信息,主要包括PPI、RHI以及扇扫等,共256字节。
详见表2-4。
2.5 扫描配置块扫描配置块提供具体扫描配置信息,每扫描配置块由256字节组成。
详见表2-5。
对于扫描任务来说,通常包括不止一个仰角或方位角,多个扫描的配置块依次排列在任务配置块后面。
3 径向数据块3.1 径向头块径向头块提供数据状态、采集时间等信息,共64字节,详见表3-1。
3.2 径向数据块径向数据块用来存储雷达探测的径向数据资料,如反射率Z、径向速度V以及谱宽W等。
天气雷达基数据标准格式
公共数据块用于描述数据采集所需的参数,如雷达站点信息和任务配置参数等。详细描述见表2-1。
表2-1公共数据块列表
BLOCK区块
BYTES字节
REMARKS描述
GENERIC HEADER通用头块
32
文件格式版本、文件类型等信息,见表2-2
SITE CONFIG站点配置
128
雷达站点信息,见表2-3
TASK CONFIG任务配置
10
Angular
Resolution
角度分辨率
FLOAT
Degree
度
~
径向数据的角度分辨率,仅用于PPI扫描模式
11
Scan Speed
扫描速度
FLOAT
Deg/sec
度/秒
~
PPI扫描的方位转速,或RHI扫描的俯仰转速
12
Log Resolution
强度分辨率
INT
Meter
米
1~5,000
强度数据的距离分辨率
类型/字节数
UNIT
单位
RANGE
范围
REMARKS
描述
01
MagicNumber魔术字
INT
N/A不适用
0x4D545352
固定标志,用来指示雷达数据文件。
02
Major Version
主版本号
SHORT
N/A不适用
0~65536
03
Minor Version
次版本号
SHORT
N/A不适用
0~65536
公共数据块用于提供数据站点信息、任务配置等公共信息。(见第二章)
径向数据块用于存储天气雷达的探测资料,包括3个子块:径向头、径向数据头以及径向数据。(见第三章)
《天气雷达基数据和单站产品格式》编制说明
气象行业标准《天气雷达基数据和单站产品格式》编制说明一、工作简况1. 任务来源本标准由中国气象局气象探测中心提出,全国气象基本信息标准化技术委员会归口。
2019年3月11日由中国气象局下达中国气象局气象探测中心(气预函【2018】67号),项目编号QX 2019-88。
2. 协作单位本标准由中国气象局气象探测中心和北京敏视达雷达有限公司共同起草。
3. 主要起草人及所做工作本标准主要起草人为高杰、张乐坚、高玉春、梁海河、文浩、张持岸,其分工如下:高杰,负责总体编写及任务协调分工。
张乐坚,负责从应用角度提出需求建议。
高玉春,负责对总体技术审核把关。
梁海河,负责对总体技术审核把关。
文浩,负责格式文本整理。
张持岸,负责从雷达厂家角度,提出数据格式需求,并协助完成初稿。
4. 主要工作过程2015年初,联合雷达厂家技术人员,汇同探测中心技术人员,组成编写组。
至2015年底,综合考虑现有格式存在的问题,进行调研,开展天气雷达数据格式标准化工作,形成了初稿,对各相关业务单位征求意见,修订后形成了《天气雷达基数据和产品标准格式(试用)》,(完成征求意见稿,征求到的主要意见)2017年格式印发试行。
在一些试点省份雷达站和国家级业务单位进行了业务试点应用,选择试点台站包含了现业务在用的所有型号雷达,按照新的标准格式进行了数据生成,数据传输等方面试运行,测试了格式的适用性,软件的稳定性,传输的完整性等,同时联合业务应用单位对新格式的适应等多个方面也进行了测试应用。
(修改并形成送审稿)(召开审查会的时间、地点、过程。
审查会主要意见)(修改并形成报批稿)二、编制原则和主要内容确定的依据1. 编制原则由于雷达硬件的升级,探测信息的增多,现有格式已经不能满足应用需求,编写原则就是考虑现状,兼顾未来。
确定一种符合未来发展需求的格式。
同时跟踪国外雷达数据格式,特别是国际流行的数据格式,考虑兼容性。
特别是注意到雷达数据格式主要是用于今后雷达数据共享的要求,提出一种适用的雷达数据格式。
8.天气雷达基数据标准格式(v1.0)
8.天气雷达基数据标准格式(v1.0)天气雷达基数据标准格式(V1.0版)1 概述1.1适用范围本格式规定了天气雷达基数据文件的结构、命名、单位和参数范围,我国各型号天气雷达生成的基数据应符合本格式要求。
本格式适用于基数据的传输、存储和服务。
1.2数据类型定义文中的数据类型定义均基于32位操作系统(如Linux/Windows),主要包括:• INT – 4字节整型• SHORT – 2字节整型• CHAR*N – N字节字符型• FLOAT – 4字节浮点类型,符合IEEE754规范• LONG – 8字节整型1.3基数据结构基数据文件分为多个区块,每个区块描述一组信息。
如站点配置块用来描述雷达站的信息,包括经纬度、天线架设高度等。
12基数据可分为公共数据块和径向数据块两部分(整体结构见表1-1),其中:公共数据块用于提供数据站点信息、任务配置等公共信息。
(见第二章)径向数据块用于存储天气雷达的探测资料,包括3个子块:径向头、径向数据头以及径向数据。
(见第三章)表1-1 基数据整体结构表2-7;I 表示径向数据长度,参见表3-1中的数据长度说明。
2 公共数据块公共数据块用于描述数据采集所需的参数,如雷达站点信息和任务配置参数等。
详细描述见表2-1。
表 2-1 公共数据块列表BLOCK 区块BYTES 字节REMARKS 描述区块内容字节 Common Block 公共数据块GENERIC HEADER/通用头 32 SITE CONFIGURATION/站点配置128 TASK CONFIGURATION/任务配置 256 CUT #1 CONFIGURATION/扫描配置#1┊CUT #N CONFIGURATION/扫描配置#N256 ┊ 256 径向数据块 Radial BlockRadial 1 第1个径向RADIAL HEADER/径向头64 MOMENT HEADER #1/径向数据头#1 MOMENT DATA #1/径向数据#1┊MOMENT HEADER #K/径向数据头#K MOMENT DATA #K/径向数据#K32 I ┊ 32 I …… …………Radial M第M 个径向…… ……GENERIC HEADER通用头块32 文件格式版本、文件类型等信息,见表2-2SITE CONFIG站点配置128 雷达站点信息,见表2-3TASK CONFIG任务配置256 扫描任务配置,见表2-4CUT CONFIG扫描配置256*N 扫描配置信息,见表2-52.1 通用头块通用头块用于标识文件的类别,内容主要包括文件格式版本、文件类型等信息,共32字节。
CC雷达基数据格式说明(附函数)要点

CINRAD/CC/CCJ雷达原始数据格式声明:本数据格式适用CINRAD/CC和CINRAD/CCJ.安徽四创电子股份有限公司保留最终解释权.本文档仅供内部交流,请不要发表.文件名:平扫(PPI):NNNNYYDDHH.MMP高扫(RHI):NNNNYYDDHH.MMR体扫(VPPI):NNNNYYDDHH.MMV单库FFT:NNNNYYDDHH.MMF等高PPI(CAPPI):NNNNYYDDHH.MMCN:年Y:月D:日H:时M:分数据组成:整个数据由文件头(1个)和基于极坐标系的原始数据(512个径向)组成.文件头:////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////tagWEATHERRADAR雷达信息的结构typedef struct tagWEATHERRADAR{char cFileType[16]; //3830数据标识(CINRADC)char cCountry[30]; //国家名char cProvince[20]; //省名char cStation[40]; //站名char cStationNumber[10]; //区站号char cRadarType[20]; //雷达型号char cLongitude[16]; //天线所在经度char cLatitude[16]; //天线所在纬度long lLongitudeValue; //具体经度long lLatitudeValue; //具体纬度long lHeight; //天线海拔高度short sMaxAngle; //地物阻挡最大仰角short sOptAngle; //最佳观测仰角unsigned char ucSYear1; //观测开始时间的年千百位(19-20)unsigned char ucSYear2; //观测开始时间的年十个位(00-99)unsigned char ucSMonth; //观测开始时间的月(1-12)unsigned char ucSDay; //观测开始时间的日(1-31)unsigned char ucSHour; //观测开始时间的时(0-23)unsigned char ucSMinute; //观测开始时间的分(0-59)unsigned char ucSSecond; //观测开始时间的秒(0-59)unsigned char ucTimeFrom; //时间来源0-计算机时钟(1天内未对时)// 1-计算机时钟(1天内已对时)// 2-GPS// 3-其它unsigned char ucEYear1; //观测结束时间的年千百位(19-20)unsigned char ucEYear2; //观测结束时间的年十个位(00-99)unsigned char ucEMonth; //观测结束时间的月(1-12)unsigned char ucEDay; //观测结束时间的日(1-31)unsigned char ucEHour; //观测结束时间的时(0-23)unsigned char ucEMinute; //观测结束时间的分(0-59)unsigned char ucESecond; //观测结束时间的秒(0-59)unsigned char ucScanMode; //扫描方式1-RHI// 10-PPI和ZPPI// 1XX=VPPI(XX为扫描圈数) unsigned long ulSmilliSecond; //以微秒为单位表示的秒的小数位unsigned short usRHIA; //RHI所在的方位角(0.01度为单位)// PPI和VPPI时为FFFFshort sRHIL; //RHI所在的最低仰角(0.01度为单位)//PPI和VPPI时为FFFFshort sRHIH; //RHI所在的最高仰角(0.01度为单位)//PPI和VPPI时为FFFFunsigned short usEchoType; //回波类型0x405a-Z 0x406a-V 0x407a-W// 0x408a-ZVW三要素unsigned short usProdCode; //数据类型0x8001-PPI数据0x8002-RHI数据// 0x8003-VPPI数据0x8004-单强度PPI数据// 0x8005-CAPPI数据unsigned char ucCalibration; //标校状态0-无1-自动2-1星期内人工// 3-1月内人工unsigned char remain1[3]; //保留字unsigned char remain2[660]; //保留字,放VPPISCANPARAMETER数据//该结构的说明见后long lAntennaG; //天线增益(0.001dB)long lPower; //峰值功率(瓦)long lWavelength; //波长(微米)unsigned short usBeamH; //垂直波束宽度(秒)unsigned short usBeamL; //水平波束宽度(秒)unsigned short usPolarization; //极化状态0-水平1-垂直2-双偏振// 3-圆偏振4-其它unsigned short usLogA; //对数动态范围(0.01dB)unsigned short usLineA; //线性动态范围(0.01dB)unsigned short usAGCP; //AGC延迟量(微秒)unsigned short usFreqMode; //频率方式1-单重复频率2-双重复频率3:2// 3-双重复频率4:3unsigned short usFreqRepeat; //重复频率unsigned short usPPPPulse; //PPP脉冲数unsigned short usFFTPoint; //FFT间隔点数unsigned short usProcessType; //信号处理方式1-PPP 2-全程FFT// 3-单库FFTunsigned char ucClutterT; //杂波消除阀值(即STC)char cSidelobe; //第一旁瓣(dB)unsigned char ucVelocityT; //速度门限unsigned char ucFilderP; //地物消除方式0-无1-IIR滤波器1// 2-IIR滤波器2 3-IIR滤波器3// 4-IIR滤波器4unsigned char ucNoiseT; //噪声消除阀值(即强度门限)unsigned char ucSQIT; //SQI门限unsigned char ucIntensityC; //DVIP强度值估算采用的通道// 1-对数通道2-线性通道unsigned char ucIntensityR; //强度值估算是否距离订正// 0-无(dB) 1-已订正(dBZ)unsigned char ucCalNoise; //噪声系数标定值unsigned char ucCalPower; //发射功率标定值unsigned char ucCalPulseWidth; //脉冲宽度标定值unsigned char ucCalWorkFreq; //工作频率标定值unsigned char ucCalLog; //对数斜率标定值char remain3[92]; //保留字unsigned long int liDataOffset; //数据偏移地址}WEATHERRADAR;//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////tagVPPISCANPARAMETER仰角层的结构typedef struct tagVPPISCANPARAMETER{unsigned short usMaxV; //最大可测速度(厘米/秒)unsigned short usMaxL; //最大可测距离(10米)unsigned short usBindWidth; //库长(米)unsigned short usBinNumber; //每径向库数unsigned short usRecordNumber; //本圈径向数unsigned short usArotate; //本圈转速(0.01度/秒)unsigned short usPrf1; //本圈第一次重复频率(0.1Hz)对应单重频或双重频的高者unsigned short usPrf2; //本圈第二次重复频率(0.1Hz)对应双重频的低者unsigned short usSpulseW; //本圈脉宽(微秒)short usAngle; //仰角(0.01度)unsigned char cSweepStatus; //1=单要素2=三要素(单重频) 3=三要素(双重频) unsigned char cAmbiguousp; //0=无软件退模糊1=软件退模糊}VPPISCANPARAMETER;//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////注:在WEATHERRADAR结构的remain2处填写了的VPPISCANPARAMETER;结构表明本仰角层的参数(对PPI和VPPI而言)或其他含义(对RHI和单库FFT文件而言)VPPI有几层填几个,PPI RHI FFT数据只填写一层即一个.原始数据:PPI RHI VPPI的数据排列如下:第0个径向的数据:Z(字)500个V(字)500个W(字)500个….….第512个径向的数据:Z(字)500个V(字)500个W(字)500个注: Z V W均为16位的字型数据(在C语言中用short int 有符整型) 所读出的值除以10得到一个小数就是最终的值.Z以dBz为单位V W均以m/s为单位读出的数据如果是0x8000,说明此处无回波.这样做的目的是为了必须区别回波强度为0和无回波.单库FFT数据排列如下:当为256点时:256个通道的功率值(字型单位:dB)当为128点时:128个通道的功率值(字型单位:dB)附函数段:////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////检查要打开的文件//filename:文件名CString CRadar::CheckData(CString filename){CFile *fp;CString str="INV ALID",error,tempfilename=filename;try{fp=new CFile(filename,CFile::modeRead);}catch(CFileException* e){ProcessFileError(e,1);return str;}WEATHERRADAR tempinfo;fp->SeekToBegin();fp->Read(&tempinfo,sizeof(WEATHERRADAR));if(strcmp(tempinfo.cFileType,"CINRADC")){error.Format("%s 不是3830雷达数据文件!",tempfilename);AfxMessageBox(error,MB_OK|MB_ICONSTOP);delete fp;return str;}if(ProdCode==0x8001) str="PPI";else if(ProdCode==0x8002) str="RHI";else if(ProdCode==0x8003) str="VPPI";else if(ProdCode==0x8004) str="ZPPI";else if(ProdCode==0x8005) str="CAPPI";else if(ProdCode==0x8006) str="FFT";else{error.Format("文件%s 不是3830雷达数据文件!",tempfilename);AfxMessageBox(error,MB_OK|MB_ICONSTOP);}delete fp;return str;}//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //读取数据//filename:要打开的文件名BOOL CPPI::LoadData(CString filename){CFile *fp;CString str;try{fp=new CFile(filename,CFile::modeRead);}catch(CFileException* e){radar->ProcessFileError(e,1);return FALSE;}fp->SeekToBegin();fp->Read(&info,sizeof(WEATHERRADAR));fp->Seek(218L,CFile::begin);fp->Read(&vppipara,sizeof(VPPISCANPARAMETER));rmax=int(MaxL/100.0+0.5);scanyj=Angle/100.0;//装地图文件long l;//申请数据存储区hData=::GlobalAlloc(GHND,512L*1500L*2L);if(!hData){AfxMessageBox("内存不足",MB_OK|MB_ICONSTOP);::GlobalFree(hData);delete fp;return FALSE;}pData=(short*)::GlobalLock(hData);for(l=0;l<(512*1500);l++) pData[l]=short(0x8000); //程序中用来表示有无数据,可以//不用考虑fp->Seek(info.liDataOffset,CFile::begin);int i,BEGINPOS,angle;long pos;short tempData[500];//我的程序要把每一个径向的连续的ZVW数据块读出后再按每个点排列成//第1个点的Z V W 第2个点的Z V W …. /第500个点的Z V W//可以不用考虑if(radar->scanmode=="PPI"){for(angle=0;angle<512;angle++){for(BEGINPOS=0;BEGINPOS<=2;BEGINPOS++){fp->Read(tempData,500L*2);pos=long(angle*1500+BEGINPOS);for(i=0;i<500;i++){pData[pos]=tempData[i];pos+=3;}}}}else if(radar->scanmode=="ZPPI"){for(angle=0;angle<512;angle++){fp->Read(tempData,500L*2);pos=long(angle*1500+0);for(i=0;i<500;i++){pData[pos]=tempData[i];pos+=3;}}}delete fp;openfilename=filename;return TRUE;}//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //读取数据//filename:要打开的文件名BOOL CRHI::LoadData(CString filename){CFile *fp;CString str;try{fp=new CFile(filename,CFile::modeRead);}catch(CFileException* e){radar->ProcessFileError(e,1);return FALSE;}fp->SeekToBegin();fp->Read(&info,sizeof(WEATHERRADAR));fp->Seek(218L,CFile::begin);fp->Read(&vppipara,sizeof(VPPISCANPARAMETER));rmax=int(MaxL/100);scanfw=RHIA/100.0;beginyj=info.sRHIL/100.0;endyj=info.sRHIH/100.0;hData=::GlobalAlloc(GHND,512L*1500L*2L);if(!hData){AfxMessageBox("内存不足",MB_OK|MB_ICONSTOP);::GlobalFree(hData);delete fp;return FALSE;}pData=(short*)::GlobalLock(hData);long l;for(l=0;l<(512*1500);l++) pData[l]=short(0x8000);fp->Seek(info.liDataOffset,CFile::begin);int i,BEGINPOS,angle;long pos;short tempData[500];for(angle=0;angle<512;angle++){for(BEGINPOS=0;BEGINPOS<=2;BEGINPOS++){fp->Read(tempData,500L*2);pos=long(angle*1500+BEGINPOS);for(i=0;i<500;i++){pData[pos]=tempData[i];pos+=3;}}}delete fp;openfilename=filename;if(pDC||pmemDC||pbackDC) ChangeDistanceOrHeight(rmax,hmax);return TRUE;}//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //读取数据//filename:要打开的文件名BOOL CVPPI::LoadData(CString filename){// if(radar->IsZip) filename=radar->unzipfile;CFile *fp;CString str;try{fp=new CFile(filename,CFile::modeRead);}catch(CFileException* e){radar->ProcessFileError(e,1);return FALSE;}fp->SeekToBegin();fp->Read(&info,sizeof(WEATHERRADAR));fp->Seek(218L,CFile::begin);ScanPara->num=info.ucScanMode-100;int yjc,temprf1,temprf2;for(yjc=0;yjc<ScanPara->num;yjc++){fp->Read(&vppipara[yjc],sizeof(VPPISCANPARAMETER));ScanPara->yj[yjc]=float(vppipara[yjc].usAngle/100.0);temprf1=int(vppipara[yjc].usPrf1/10.0+0.5);temprf2=int(vppipara[yjc].usPrf2/10.0+0.5);ScanPara->dsp.frequency=temprf1;if((temprf1*1.0/temprf2)==(3.0/2.0)) ScanPara->dsp.freqctrl=2;else if((temprf1*1.0/temprf2)==(4.0/3.0)) ScanPara->dsp.freqctrl=3;else ScanPara->dsp.freqctrl=1;ScanPara->dsp.pulsewidth=vppipara[yjc].usSpulseW;}rmax=int(vppipara[0].usMaxL/100);long l;//申请数据存储区hData=::GlobalAlloc(GHND,512L*1500L*2L*ScanPara->num);if(!hData){AfxMessageBox("内存不足",MB_OK|MB_ICONSTOP);::GlobalFree(hData);delete fp;return FALSE;}pData=(short*)::GlobalLock(hData);for(l=0;l<(ScanPara->num*512*1500);l++) pData[l]=short(0x8000);//因为pData中存放的是处理后的数据(有0),为了区分无回波和0,规定无回波0x8000=-32768, //0=0fp->Seek(info.liDataOffset,CFile::begin);int i,BEGINPOS,angle;long pos;short tempData[500];for(yjc=0;yjc<ScanPara->num;yjc++)for(angle=0;angle<512;angle++){for(BEGINPOS=0;BEGINPOS<=2;BEGINPOS++){fp->Read(tempData,500L*2);pos=long(yjc*1500*512+angle*1500+BEGINPOS);for(i=0;i<500;i++){pData[pos]=tempData[i];pos+=3;}}}delete fp;openfilename=filename;curyjc=0;return TRUE;}//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////// //读取数据//filename:要打开的文件名BOOL CFFT::LoadData(CString filename){// if(radar->IsZip) filename=radar->unzipfile;CFile *fp;CString str;try{fp=new CFile(filename,CFile::modeRead);}catch(CFileException* e){radar->ProcessFileError(e,1);return FALSE;}fp->SeekToBegin();fp->Read(&info,sizeof(WEATHERRADAR));fp->Seek(218L,CFile::begin);fp->Read(&vppipara,sizeof(VPPISCANPARAMETER));rmax=int(MaxL/100.0+0.5);TESTPoints=int(Arotate);scanfw=Angle/100.0;oldFFTPoints=FFTPoint;fp->Seek(info.liDataOffset,CFile::begin);fp->Read(linedata.data,256L*2);delete fp;openfilename=filename;ChangeFFTPoints(oldFFTPoints);return TRUE;}//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////。
高空探测基数据和监控信息格式总结

附件2:L 波段监控信息文件格式一、探空雷达监控数据格式文件命名:Z_UPAR_I_IIiii_yyyyMMddhhmmss_R_WEA_LR_SRSI.txtZ_UPAR_I_IIiii_yyyyMMddhhmmss_R_WEW_LR_SRSI.txtZ: 固定编码,表示国内交换资料;UPAR固定编码,表示高空气象探测类;I :表示后面编区站号;IIiii :表示测站站号;yyyyMMddhhmmss :表示国际时的文件生成时间;R:表示运行状态信息类;WEA表示探空;WE:表示测风;LR:表示L波段探空雷达;SRSI :表示测站观测仪器状态信息;TXT:表示此文件为ASCII编码文件二、探测参数文件(放球软件产生)区站号档案号年月日时分秒(均为整数,中间以半角空格分离)雷达工作状态(为整数,1 代表综合,2代表雷达测风,3- 综合探测、无斜距测风)接收机频率磁控管电流(%.1f 格式的浮点数)接收机增益(整数)(中间以半角空格分离)印刷板11-1 状态印刷板11-2 状态印刷板11-3 状态印刷板11-4 状态印刷板11-5 状态印刷板11-6 状态印刷板11-7 状态印刷板11-8 状态(为1- 正常、0- 不正常,short 类型,中间以半角空格分离)1程序方波上程序方波下程序方波左程序方波右触发脉冲精扫触发粗扫触发仰角驱动电源+24V 方位驱动电源+24 仰角驱动模块方位驱动模块仰角上限位仰角下限位发射机过荷保护发射机反峰保护发射机过压短路(为1-正常、0-不正常,short 类型)文件格式示例如下:54511 29001 2005 10 26 11 12 0911675.0 11.7 2551 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1状态参数文件(数据处理软件产生)区站号档案号仪器号码(均为整数,中间以半角空格分离)地面瞬间气温地面瞬间气压地面瞬间湿度地面风向地面风速(均为浮点数)总云量低云量云状(编码, 字符串,中间以“ / ”连接,缺测填写” //// ”)能见度天气现象(编码,中间以“ / “连接,缺测填写” //// ”)工作方式(为整数,1 代表综合,2代表雷达测风,3 综合探测、无斜距测风)(均为整数,中间以半角空格分离)年月日时分秒(施放时间)时分(探空终止时间)探空终止高度时分(测风终止时间)测风终止高度(均为整数,时间格式为2005 10 26 10 01 00 ,高位不足,补0,中间以半角空格分离)球坐标总数(整数)时间(整数)仰角方位角(%.2f 的浮点数)斜距高度(整数,中间以半角空格分离)文件格式示例如下:59663 23018 24605515.0 1009.2 97 23 2 10 10 CUU/FCB 0.1 01/56 1—2 —32005 10 26 11 12 07 15 26 22372 15 26 2150414 0 0.00 120.00 63 881 49.95 217.94 410 4072 58.25 236.01 794 7663 67.12 268.21 1221 12154 72.32 293.90 1489 15085 73.48 335.88 1876 18886 63.83 26.71 2342 21907 56.22 47.07 2997 25788 51.56 53.00 367929689 49.24 53.94 4257 331010 47.56 60.15 4867 367711 44.57 67.98 5681 407012 42.13 71.95 6500 444313 39.62 74.55 7442 4828注:缺测数据项以“ 〃〃 ”,表示。
CC雷达基数据格式说明(附函数)

CINRAD/CC/CCJ雷达原始数据格式声明:本数据格式合用CINRAD/CC和CINRAD/CCJ.安徽四创电子股分有限公司保留最终解释权.本文档仅供内部交流,请不要发表.文件各平扫(PPI): NNNNYYDDHH.MMP高扫(RHI): NNNNYYDDHH.MXIR体扫(VPPI): NNNNYYDDHH.MMV单库 F F T: NNNNYYDDHH.MMF等高PPI (CAPPD: NNNNYYDDHH.NIMCN:年Y:月D:日H:时M:分数据组成:整个数据由文件头Q个)和基于极坐标系的原始数据(512个径向)组成.文件头:/〃/〃/〃//〃〃〃/〃〃〃〃/〃〃〃/〃//〃/〃//〃/〃〃〃〃/〃〃///〃/〃//〃〃〃〃///〃〃/〃〃///〃/〃/〃//〃//〃//〃/〃〃〃〃/〃〃〃//tagWEATHERRADAR雷达信息的结构typedef suuct tagWEATHERKWAR{char cFileType[16];chai cCounuy[30];char cProviiice[20];chai cStation[40];char cStatioiiNumbei [ 10]; chai cRadarType[20]; chai cLongitude[16];char cLatimde[16];long iLongitudeX^alue; long ILatitudeValue;long IHeight;short sMaxAngle,short sOptAiigle; unsigned char ucSYeai l; unsigned char ucSYeai2; //3830 数据标识(CINRADC)〃国家名〃省名〃站名〃区站号〃雷达型号〃天线所在经度//天线所在纬度//具体经度〃具体纬度//天线海拔高度〃地物阻挡最大仰角〃最佳观测仰角//观测开始时间的年千百位(19-〃观测开始时间的月(M2) 〃观测开始时间的0(1-31) 〃观测开始时间的时(0-23) 〃观测开始时间的分(0-59) //观测开始时间的秒(0-59) 〃时间来源0•计算机时仲(1天内未对时) // 1-计算机时钟(1天内己对时) // 2-GPS // 3-其它 〃观测结束时间的年T •百位(19-20) 〃观测结束时间的年十个位(00-99) //观测结束时间的月(1-12) //观测结束时间的口(1-31) 〃观测结束时间的时(0-23) 〃观测结束时间的分(0-59) 〃观测结束时间的秒(0-59) 〃扫描方式1-RHI // 10-PPI 和 ZPPI // 1XX=VPPI(XX 为扫描圈数) 〃以微秒为单位表示的秒的小数位 ,:皿所在的方位角(0.01度为单位) // PPI 和 VPPI 时为 FFFF /.'RHI 所在的最低仰角(0.01度为单位) /.PPI 和 VPPI 时为 FFFF /.'RHI 所在的最高仰角(0.01度为单位) /.PPI 和 VPPI 时为 FFFF 〃回波类型 0x405a-Z 0x406a-V 0x407a-W // 0x408a-ZVW 三要素 〃数据类型0x8001-PPI 数据OX8OO2-RHI 数据 // Ox8OO3-VPPI 数据 0x8004-单强度 PPI 数据 // 0XS005-CAPPI 数据 //标校状态0-无1-自动2-1星期内人工 // 3-1月内人工 //保留字 〃保留字,放 VTPISCANPARAMETER 数据 〃该结构的说明见后 〃天线增益(O.OOldB) 〃峰值功率(瓦) 〃波长(微米) 〃垂直波束宽度(秒)〃水平波束宽度(秒)〃极化状态0-水平1-垂直2-双偏振unsigned char ucSMonth;unsigned char ucSDay;unsigned char ucSHoui;unsigned char ucSMmute;unsigned char ucSSecond;unsigned char ucTuneFiom,unsigned char ucEYearl;unsigned char ucEYear2;unsigned char ucEMonth;unsigned char ucEDay;unsigned char ucEHour;unsigned char ucENfinute;unsigned char ucESecond;unsigned char ucScanMode;unsigned long ulSmilliSecond;unsigned short usRHIA;shon sRHIL;short sRHIH;unsigned short usEchoType;unsigned short usPiodCode,unsigned char ucCalibiation;unsigned char remain 1 [3];unsigned char iemaui2[660];long lAiiteiuiaG;long IPower; long IWavelength;unsigned short usBeamH;unsigned short usBeamL;unsigned short usPolarizatiou;unsigned short usLogA;// 3-圆偏振4-其它〃对数动态范围(O.OldB)〃线性动态范H (O.OldB )//AGC 延迟量(微秒)〃频率方式 1-单重岌频率2-双重复频率3:2// 3-双重复频率4:3〃重复频率/ PPP 脉冲数,仔FT 间隔点数〃信号处理方式 1-PPP 2-全程FFT// 3-单库 FFT〃杂波消除阀值(即STC )〃第一旁瓣(dB )〃速度门限/外也物消除方式。
8.天气雷达基数据标准格式[v1.0]
![8.天气雷达基数据标准格式[v1.0]](https://img.taocdn.com/s3/m/f8db47badd88d0d233d46a5b.png)
天气雷达基数据标准格式(V1.0版)1 概述1.1适用范围本格式规定了天气雷达基数据文件的结构、命名、单位和参数范围,我国各型号天气雷达生成的基数据应符合本格式要求。
本格式适用于基数据的传输、存储和服务。
1.2数据类型定义文中的数据类型定义均基于32位操作系统(如Linux/Windows),主要包括:• INT – 4字节整型• SHORT – 2字节整型• CHAR*N – N字节字符型• FLOAT – 4字节浮点类型,符合IEEE754规范• LONG – 8字节整型1.3基数据结构基数据文件分为多个区块,每个区块描述一组信息。
如站点配置块用来描述雷达站的信息,包括经纬度、天线架设高度等。
基数据可分为公共数据块和径向数据块两部分(整体结构见表1-1),其中:公共数据块用于提供数据站点信息、任务配置等公共信息。
(见第二章)径向数据块用于存储天气雷达的探测资料,包括3个子块:径向头、径向数据头以及径向数据。
(见第三章)表1-1 基数据整体结构示径向数据长度,参见表3-1中的数据长度说明。
2 公共数据块公共数据块用于描述数据采集所需的参数,如雷达站点信息和任务配置参数等。
详细描述见表2-1。
2.1 通用头块通用头块用于标识文件的类别,内容主要包括文件格式版本、文件类型等信息,共32字节。
见表2-2。
2.2 站点配置块站点配置块用于描述雷达站信息,共128字节。
详见表2-3。
表 2-3 站点配置块2.4 任务配置块任务配置块提供雷达扫描任务一般信息,主要包括PPI、RHI以及扇扫等,共256字节。
详见表2-4。
2.5 扫描配置块扫描配置块提供具体扫描配置信息,每扫描配置块由256字节组成。
详见表2-5。
对于扫描任务来说,通常包括不止一个仰角或方位角,多个扫描的配置块依次排列在任务配置块后面。
3 径向数据块3.1 径向头块径向头块提供数据状态、采集时间等信息,共64字节,详见表3-1。
3.2 径向数据块径向数据块用来存储雷达探测的径向数据资料,如反射率Z、径向速度V以及谱宽W等。
多普列天气雷达数据存储数据格式

偏振雷达基本数据格式偏振雷达基本数据格式按照2.0数据格式标准,在数据类型类型中增加了5个偏振量,分别为:ZDR[n](反射率差值:单位为0.01dB),PHDP[n](传播相移差值:单位为0.01),KDP[n](比差分相移值:单位为0.01),LDRH[n](退极化比值:单位为0.01),ROHV[n](相关系数值:单位为0.001),偏振量全为short型。
在层参数信息数据结构(struct LAYERPARAM LayerInfo)中的DataForm (本层径向中的数据排列方式)参量新增48 CorZ+UnZ+V+W+ZDR+PHDP+KDP+LDRH+ROHV1、原始数据文件结构原始数据文件由文件标识(12字节)、文件头(2048字节)和数据纪录块组成。
文件头记载雷达站名、站址、雷达型号、主要参数、观测时间、扫描类型、工作状况等内容。
数据记录以极坐标方式排列。
数据类型字长说明见2.5。
原始数据文件的文件头由四个部分组成,结构排列如下:(1)站址基本情况数据结构struct RADARSITE SiteInfo(共168个字节)(2)性能参数数据结构struct RADARPERFORMANCEPARAM PerformanceInfo(共36个字节)(3)观测参数结构struct RADAROBSERV A TIONPARAM ObservationInfo(共1282个字节),其中包括一个层参数信息数据结构struct LAYERPARAM LayerInfo 和三个变库长数据结构struct BINPARAM BinRange。
(4)其它信息参数数据结构struct RADAROTHERINFO OtherInfo (共562个字节)。
1.1 原始数据文件标识(12字节)char FileID[4] 雷达数据标识(原始数据标识符’RD’为雷达原始数据,’GD’为雷达衍生数据等等…. (0-3)float VersionNo 表示数据格式的版本号(4-7)long int FileHeaderLength 表示文件头的长度(8-11)1. 2原始数据文件头(2048字节)(1)站址基本情况struct RADARSITE SiteInfo(共168个字节)数据结构的定义如下:char Country[30] 国家名,文本格式输入(12-41)char Province[20] 省名,文本格式输入(42-61)char Station[40] 站名,文本格式输入(62-101)char StationNumber[10] 区站号,文本格式输入(102-111)char RadarType[20] 雷达型号,文本格式输入(112-131)char Longitude[16] 天线所在经度,文本格式输入书写格式例:E115º32'12”(132-147)char Latitude[16] 天线所在纬度,文本格式输入书写格式例:N35º30'15”(148-163) long int LongitudeValue 天线所在经度的数值,以1/1000度为计数单位东经(E)为正,西经(W)为负(164-167)long int LatitudeValue 天线所在纬度的数值,以1/1000度为计数单位北纬(N)为正,南纬(S)为负(168-171)long int Height 天线海拔高度,以毫米为计数单位(172-175)short MaxAngle 测站四周地物最大遮挡仰角,以1/100度为计数单位(176-177)short OptiAngle 测站的最佳观测仰角(地物回波强度<10dBZ),以1/100度为计数单位(178-179)(2)性能参数struct RADARPERFORMANCEPARAM PerformanceInfo(共36个字节)数据结构定义如下:long int AntennaG 天线增益以0.001dB为计数单位(180-183)unsigned short VerBeamW 垂直波束宽度,以1/100度为计数单位(184-185)unsigned short HorBeamW 水平波束宽度,以1/100度为计数单位(186-187)unsigne char Polarizations 偏振状况(188)0=水平1=垂直2=双线偏振3=圆偏振4=其他unsigned short SideLobe 第一旁瓣,以0.01dB为计数单位(189-190)long int Power 雷达脉冲峰值功率,以瓦为单位(191-194)long int WaveLength 波长,以微米为计数单位(195-198)unsigned short LogA 对数接收机动态范围,以以0.01dB为计数单位(199-200)unsigned short LineA 线性接收机动态范围,以以0.01dB为计数单位(201-202)unsigned short AGCP AGC延迟量,以微秒为计数单位(203-204)unsigned short LogMinPower 对数接收机最小可测功率,计数单位为0.01dBm (205-206)unsigned short LinMinPower 线性接收机最小可测功率,计数单位为0.01dBm (207-208) unsigned char ClutterT 杂波消除阈值,计数单位为0.01dB (209) unsigned char VelocityP 速度处理方式(210)0=无速度处理1=PPP2=FFTunsigned char FilterP 地物杂波消除方式(211)0=无杂波消除1=地物杂波图扣除法2=地物杂波图+滤波器处理3=滤波器处理4=谱分析处理5=其他处理法unsigned char NoiseT 噪声消除阈值(0-255)(212)unsigned char SQIT SQI,以0.01为计数单位(213)unsigned char IntensityC RVP强度值估算采用的通道(214)1=对数通道2=线性通道unsigned char IntensityR 强度估算是否进行了距离订正(215)0=无1=已进行了距离订正(3)观测参数struct RADAROBSERV ATIONPARAM ObservationInfo(共1282个字节)数据结构定义如下:unsigned char Stype 扫描方式(216)1=RHI10=PPI1xx=VOL,xx为扫描层数unsigned short Syear 观测记录开始时间的年(2000-)(217-218)unsigned char SMonth 观测记录开始时间的月(1-12)(219)unsigned char SDay 观测记录开始时间的日(1-31)(220)unsigned char SHour 观测记录开始时间的时(00-23)(221)unsigned char SMinute 观测记录开始时间的分(00-59)(222)unsigned char SSecond 观测记录开始时间的秒(00-59)(223)unsigned char TimeP 时间来源(224)0=计算机时钟,但一天内未进行对时1=计算机时钟,但一天内进行了对时2=GPS3=其他unsigned long int SMillisecond 秒的小数位(计数单位为微秒)(255-228)unsigned char Calibration 标校状态(229)0=无标校1=自动标校2=一星期内人工标校3=一月内人工标校其它码不用unsigned char IntensityI 强度积分次数(32-128)(230)unsigned char VelocityP 速度处理样本(31-255)(样本数减1)(231)unsigned short ZStartBin 强度有效数据开始库数(232-233)unsigned short VStartBin 速度有效数据开始库数(234-235)unsigned short WStartBin 谱宽有效数据开始库数(236-237)struct LAYERPARAM LayerInfo[32]层参数数据结构(各圈扫描状态设置)(238-1357)unsigned short RHIA 做RHI时的所在方位角,计数单位为1/100度,做PPI和立体扫描时为65535 (1358-1359)short RHIL 做RHI时的最低仰角,计数单位为1/100度,做其他扫描时为-32768 (1360-1361)short RHIH 做RHI时的最高仰角,计数单位为1/100度,做其他扫描时为-32768 (1362-1363)unsigned short Eyear 观测记录结束时间的年(2000-)(1364-1365)unsigned char EMonth 观测记录结束时间的月(1-12)(1366)unsigned char EDay 观测记录结束时间的日(1-31)(1367)unsigned char EHour 观测记录结束时间的时(00-23)(1368)unsigned char EMinute 观测记录结束时间的分(00-59)(1369)unsigned char ESecond 观测记录结束时间的秒(00-59)(1370)unsigned char ETenth 观测记录结束时间的1/100秒(00-99)(1371)unsigned short ZBinByte 原始强度数据中库长无变化填0 (1372-1373)原始强度数据中库长有变化填占用的字节数struct BINPARAM BinRange1[5] 5个8字节(强度库长无变化为空字节)(1374-1413)unsigned short VBinByte 原始速度数据中库长无变化填0 (1414-1415)原始速度数据中库长有变化填占用的字节数struct BINPARAM BinRange2[5] 5个8字节(速度库长无变化为空字节)(1416-1455)unsigned short WBinByte 原始谱宽数据中库长无变化填0 (1456-1457)原始谱宽数据中库长有变化填占用的字节数struct BINPARAM BinRange3[5] 5个8字节(谱宽库长无变化为空字节)(1458-1497)(4)其它信息参数struct RADAROTHERINFORMATION OtherInfo(共562个字节)数据结构定义如下:char StationID[2] 台站代码(1498-1499)char JHType 双极化方式(自定义添加)(1500-1500)01—HH 02—VV 03—HHVV04—HHHV 05—VVVHchar Spare[560] 备用字节560个字节(1501-2059)1.3 数据记录块的数据结构排列如下short Elev 仰角,计数单位为1/100度unsigned short Az 方位,计数单位为1/100度unsigned char Hh 时unsigned char Hm 分unsigned char Hs 秒unsigned long int Min 秒的小数(计数单位为微秒)unsigned char CorZ[n]*经过杂波消除的dBZ值=(CorZ-64)/2unsigned char UnZ[n] 不经过杂波消除的dBZ值=(UnZ -64)/2char V[n] 速度值,计数单位为最大可测速度的1/127正值表示远离雷达的速度,负值表示朝向雷达的速度无回波时计-128unsigned char W[n] 谱宽值,计数单位为最大可测速度的1/512* n为文件头中体扫各对应层(或PPI、RHI开始层)对应的强度、速度、谱宽的各个径向的库数。
雷达资料处理上传(2005)使用说明.

雷达资料处理上传(2005)使用说明1.2005年雷达资料处理上传下载地址:/htdocs/xxlr1.asp?id=52492005年新一代天气雷达上传数据有:基本反射率R、径向多普勒速度V、组合反射率CR、垂直累积液态水含量VIL和一小时降水OHP等五种。
对敏视达公司生产的CINRAD/SA/SB/CB雷达以及安装敏视达公司产品生成软件的CINRAD/SC/CC/CD雷达,数据来源分别为19/20、27、37、57和78等产品文件。
经过TRAD2005处理后,通过9210上传。
少数没有安装敏视达公司产品生成软件的雷达站只能从原始数据中提取基本反射率R和径向多普勒速度V,经过TRAD_VOL处理后,通过9210上传。
常规数字化雷达站请继续使用2004或2003版的TRAD,不能使用2005版的TRAD程序!!!2.运行环境和安装本程序运行环境为Win 98、Win NT或Win 2000,通过WINRAR将安装程序TRAD2005.RAR解压缩到D盘的TRAD2005目录下。
软件安装前,请将2004版的TRAD备份后,停止或者删除原系统计划任务中的TRAD任务!!!在计算机重新启动之后,请即刻运行传输程序,并按照以下使用说明设置自动传输!!!3.程序文件说明传输程序命名为TRAD2005,包括执行文件:TRAD2005.exe、TRAD_VOL.exe配置文件:TRAD2005.ini、TRAD_VOL.ini数据处理库文件:TRad_SA.dll、TRad_SC.dll、TRad_CC.dll和TRadGif.dll上传处理库文件:TradSave.dll日志文件:TRAD_MM.LOG (MM标识月份)底图文件:RADMAP.DAT字体文件:ASC6X8、ASC8X14、HZK124.上传文件说明4.1. 单站雷达图像图像布局按照《新一代天气雷达基本数据格式和显示要求(2.0版)》中要求设计,左边为回波区,右边为字符注释区。
天气雷达基数据标准格式

天⽓雷达基数据标准格式天⽓雷达基数据标准格式(版)1 概述适⽤范围本格式规定了天⽓雷达基数据⽂件的结构、命名、单位和参数范围,我国各型号天⽓雷达⽣成的基数据应符合本格式要求。
本格式适⽤于基数据的传输、存储和服务。
数据类型定义⽂中的数据类型定义均基于32位操作系统(如Linux/Windows),主要包括:INT – 4字节整型SHORT – 2字节整型CHAR*N – N字节字符型FLOAT – 4字节浮点类型,符合IEEE754规范LONG – 8字节整型基数据结构基数据⽂件分为多个区块,每个区块描述⼀组信息。
如站点配置块⽤来描述雷达站的信息,包括经纬度、天线架设⾼度等。
基数据可分为公共数据块和径向数据块两部分(整体结构见表1-1),其中:公共数据块⽤于提供数据站点信息、任务配置等公共信息。
(见第⼆章)径向数据块⽤于存储天⽓雷达的探测资料,包括3个⼦块:径向头、径向数据头以及径向数据。
(见第三章)表1-1 基数据整体结构⽰径向数据长度,参见表3-1中的数据长度说明。
2 公共数据块公共数据块⽤于描述数据采集所需的参数,如雷达站点信息和任务配置参数等。
详细描述见表2-1。
表 2-1 公共数据块列表通⽤头块通⽤头块⽤于标识⽂件的类别,内容主要包括⽂件格式版本、⽂件类型等信息,共32字节。
见表2-2。
表 2-2 通⽤头块站点配置块站点配置块⽤于描述雷达站信息,共128字节。
详见表2-3。
表 2-3 站点配置块任务配置块任务配置块提供雷达扫描任务⼀般信息,主要包括PPI、RHI以及扇扫等,共256字节。
详见表2-4。
表 2-4 任务配置块扫描配置块扫描配置块提供具体扫描配置信息,每扫描配置块由256字节组成。
详见表2-5。
对于扫描任务来说,通常包括不⽌⼀个仰⾓或⽅位⾓,多个扫描的配置块依次排列在任务配置块后⾯。
扫描配置块表 2-5表2-6 数据类型掩码定义表 2-7 滤波设置掩码定义表 2-8 质控门限定义3 径向数据块径向头块径向头块提供数据状态、采集时间等信息,共64字节,详见表3-1。
多普勒雷达数据格式

多普勒雷达数据格式
多普勒雷达的数据格式包括文件头和数据区两部分。
文件头记录了雷达的基本信息和观测参数,如雷达站名、站址、雷达型号、主要参数、观测时间、扫描类型、工作状况等。
数据区则包含了雷达的观测数据,这些数据以极坐标方式排列,每一记录块由360根标准径向记录构成,每一根标准径向记录包括径向数据头,1000个校正强度数据,1000个未校正强度数据,1000个速度数据,1000个谱宽数据。
此外,多普勒雷达的数据中还包含了一些偏振量,如反射率差值(ZDR)、传播相移差值(PHDP)、比差分相移值(KDP)、退极化比值(LDRH)和相关系数值(ROHV)等。
这些数据以二进制形式存储在磁盘中,要得到十进制的真实值需要经过换算。
同时,由于电磁波在大气中的折射现象,可能导致高度测算误差,因此需要进行坐标变换以纠正这种误差。
请注意,具体的数据格式可能因雷达型号和数据处理软件的不同而有所差异。
如果需要处理或分析多普勒雷达数据,建议参考相关的技术文档或向专业人士寻求帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
//3-单库FFT
unsigned char ucClutterT;//杂波消除阀值(即STC)
char cSidelobe;//第一旁瓣(dB)
unsigned char ucVelocityT;//速度门限
unsigned short usRHIA;//RHI所在的方位角(0.01度为单位)
//PPI和VPPI时为FFFF
short sRHIL;//RHI所在的最低仰角(0.01度为单位)
//PPI和VPPI时为FFFF
short sRHIH;//RHI所在的最高仰角(0.01度为单位)
//PPI和VPPI时为FFFF
unsigned char ucSMonth;//观测开始时间的月(1-12)
unsigned char ucSDay;//观测开始时间的日(1-31)
unsigned char ucSHour;//观测开始时间的时(0-23)
unsigned char ucSMinute;//观测开始时间的分(0-59)
unsigned char ucSSecond;//观测开始时间的秒(0-59)
unsigned char ucTimeFrom;//时间来源0-计算机时钟(1天内未对时)
//1-计算机时钟(1天内已对时)
//2-GPS
//3-其它
unsigned char ucEYear1;//观测结束时间的年千百位(19-20)
unsigned short usSpulseW;//本圈脉宽(微秒)
shortusAngle;//仰角(0.01度)
unsigned char cSweepStatus;//1=单要素2=三要素(单重频)3=三要素(双重频)
unsigned char cAmbiguousp;//0=无软件退模糊1=软件退模糊
}VPPISCANPARAMETER;
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
注:在WEATHERRADAR结构的remain2处填写了的VPPISCANPARAMETER;结构表明
unsigned char ucCalWorkFreq;//工作频率标定值
unsigned char ucCalLog;//对数斜率标定值
char remain3[92];//保留字
unsigned long int liDataOffset;//数据偏移地址
}WEATHERRADAR;
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
单库FFT:NNNNYYDDHH.MMF
等高PPI(CAPPI):NNNNYYDDHH.MMC
N:年Y:月D:日H:时M:分
数据组成
整个数据由文件头(1个)和基于极坐标系的原始数据(512个径向)组成.
文件头
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
unsigned short usPolarization;//极化状态0-水平1-垂直2-双偏振
//3-圆偏振4-其它
unsigned short usLogA;//对数动态范围(0.01dB)
unsigned short usLineA;//线性动态范围(0.01dB)
unsigned short usAGCP;//AGC延迟量(微秒)
本仰角层的参数(对PPI和VPPI而言)或其他含义(对RHI和单库FFT文件而言)
VPPI有几层填几个,PPI RHI FFT数据只填写一层即一个.
原始数据:
PPIRHI VPPI的数据排列如下:
第0个径向的数据:Z(字)500个
V(字)500个
W(字)500个
….
….
第512个径向的数据:Z(字)500个
unsigned char ucEYear2;//观测结束时间的年十个位(00-99)
unsigned char ucEMonth;//观测结束时间的月(1-12)
unsigned char ucEDay;//观测结束时间的日(1-31)
unsigned char ucEHour;//观测结束时间的时(0-23)
}
catch(CFileException* e){
ProcessFileError(e,1);
return str;
}
WEATHERRADAR tempinfo;
fp->SeekToBegin();
fp->Read(&tempinfo,sizeof(WEATHERRADAR));
if(strcmp(tempinfo.cFileType,"CINRADC"))
long lHeight;//天线海拔高度
short sMaxAngle;//地物阻挡最大仰角
short sOptAngle;//最佳观测仰角
unsigned char ucSYear1;//观测开始时间的年千百位(19-20)
unsigned char ucSYear2;//观测开始时间的年十个位(00-99)
//该结构的说明见后
long lAntennaG;//天线增益(0.001dB)
long lPower;//峰值功率(瓦)
long lWavelength;//波长(微米)
unsigned short usBeamH;//垂直波束宽度(秒)
unsigned short usBeamL;//水平波束宽度(秒)
//tagWEATHERRADAR雷达信息的结构
typedef struct tagWEATHERRADAR
{
char cFileType[16];//3830数据标识(CINRADC)
char cCountry[30];//国家名
char cProvince[20];//省名
char cStation[40];//站名
//检查要打开的文件
//filename:文件名
CString CRadar::CheckData(CString filename)
{CFiBiblioteka e *fp;CStringstr="INVALID",error,tempfilename=filename;
try{
fp=new CFile(filename,CFile::modeRead);
unsigned short usFreqMode;//频率方式1-单重复频率2-双重复频率3:2
//3-双重复频率4:3
unsigned short usFreqRepeat;//重复频率
unsigned short usPPPPulse;//PPP脉冲数
unsigned short usFFTPoint;//FFT间隔点数
V(字)500个
W(字)500个
注:Z V W均为16位的字型数据(在C语言中用short int有符整型)
所读出的值除以10得到一个小数就是最终的值.
Z以dBz为单位V W均以m/s为单位
读出的数据如果是0x8000,说明此处无回波.这样做的目的是为了必须区别回波强度
为0和无回波.
单库FFT数据排列如下:
unsigned char ucEMinute;//观测结束时间的分(0-59)
unsigned char ucESecond;//观测结束时间的秒(0-59)
unsigned char ucScanMode;//扫描方式1-RHI
//10-PPI和ZPPI
//1XX=VPPI(XX为扫描圈数)
unsigned long ulSmilliSecond;//以微秒为单位表示的秒的小数位
当为256点时:256个通道的功率值(字型单位:dB)
当为128点时:128个通道的功率值(字型单位:dB)
附函数段:
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//0x8005-CAPPI数据
unsigned char ucCalibration;//标校状态0-无1-自动2-1星期内人工
//3-1月内人工
unsigned char remain1[3];//保留字
unsigned char remain2[660];//保留字,放VPPISCANPARAMETER数据
CINRAD/CC/CCJ雷达原始数据格式
声明:
本数据格式适用CINRAD/CC和CINRAD/CCJ.安徽四创电子股份有限公司保留最终解释权.本文档仅供内部交流,请不要发表.
文件名:
平扫(PPI):NNNNYYDDHH.MMP
高扫(RHI):NNNNYYDDHH.MMR
体扫(VPPI):NNNNYYDDHH.MMV
typedef struct tagVPPISCANPARAMETER