Automated model selection for simulation based on relevance reasoning
基于ADAMS的虚拟试验场自动化仿真系统

基于ADAMS的虚拟试验场自动化仿真系统基于ADAMS的虚拟试验场自动化仿真系统是一种应用于实验场景的自动化仿真系统,它基于ADAMS软件平台,通过建立虚拟试验场景,模拟真实实验过程,并通过自动化控制,完成实验的自动执行。
该系统包括三个主要模块:虚拟试验场景建模模块、自动化控制模块和实验结果分析模块。
在虚拟试验场景建模模块中,用户可以利用ADAMS提供的建模工具,根据实验需求构建出一个虚拟试验场景。
在这个场景中,可以包括各种对象和物体,如机械设备、零件、工具等。
用户可以通过拖拽、旋转等方式将这些对象放置在适当的位置,并设置它们的属性和参数。
然后,在自动化控制模块中,用户可以编写自动化控制算法,对试验场景进行控制。
结合ADAMS提供的动力学模拟功能,用户可以为试验场景设置各种物理特性和约束条件。
通过编写控制算法,可以实现自动调整试验场景中各对象的位置、速度、角度等参数,实现自动化的实验执行。
而控制算法可以根据实验需求进行优化和调整,以达到更好的实验效果。
在实验结果分析模块中,系统可以显示和记录实验过程中的各种数据和图像,以便用户进行实验结果的分析和评估。
用户可以根据数据和图像的显示,分析试验场景中各对象的运动轨迹、力学特性等信息,评估试验结果的准确性和可靠性,并根据需要进行进一步的优化调整。
基于ADAMS的虚拟试验场自动化仿真系统具有以下优势:它实现了实验场景的虚拟化,避免了实际实验所带来的时间和经济成本。
系统具有较高的自动化程度,通过自动化控制,实现了实验的自动执行,提高了实验效率。
系统通过实时数据显示和记录,使得用户可以对实验结果进行实时监测和分析,提高了实验数据的可靠性和准确性。
智能型制动器试验台及其Simulink联合仿真系统

动时 间 的变 化 , 捌此 凋 骼智 能型 动器 的 动 绺
师调 整智 能型 制 动 的 制动 力矩 的变 化 过 ,他制 功 过
更 加平稳 光 冲 酞岭 的结 构【 2
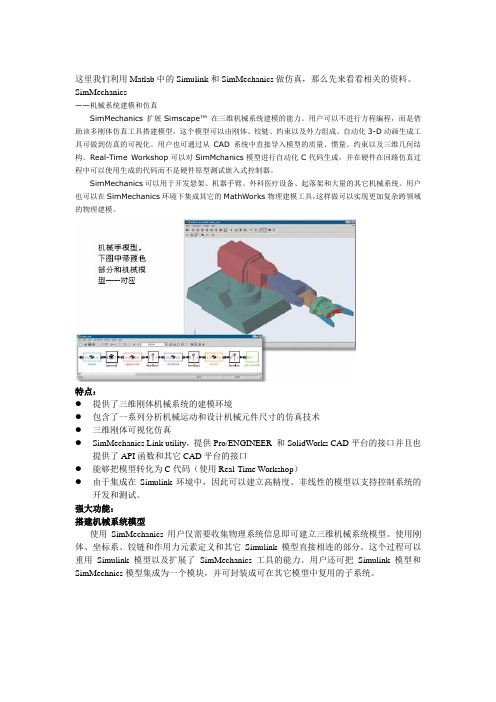
1.底 2.编 码 器 支座 3.绝 对攸 编 码 器 4.第 一 弹性 联 轴 节 5.制 动 盘 左 轴 6.制 功 船 7. 动 黜 “轴 8 押 联 轴 9.动 态转 矩 传 感 器 l0. 力限 制 联 轴 器 l】.惯 性 轮 轴 l2.惯 性 轮 13.第 弹 性 驳 轴 节 14 带 编 } 的 交流 电 饥
图 1 智 能型 制 动 器
ffl荆‘输 … l 】1控 的 启 力 ,从 凋整制z力力的 火小 。 通 过控 制输 入 电压 的 频率 , 以使 智 能型 制 动 器的
制动过 、 稳 ,缓 解制 动过 急时 (特 别 是急 停时 )的冲 , 从 【f1J保护,系统传 动链 上 的 各机构 (减 速器 、联轴 器 等 ),延 K各机 构的 使用寿命 。
将 造成 系 统传 动链 的受 伤甚 至破 坏 。 智 能型 制 动器 利 用现 代 信 息与 控 制技 术 和 变频 调 速
技 术 ,对 传 统 的常 闭式 电液 或 电磁 制 动器 予 以 智能 化 升 级 ,使传统仅有开启和闭合两种状态的制动器成为制动 力 和 制动 时 间可 控 ,根据 需 要可 进 行调 节 的 智能 型 制 动 器_1叫。图 1所示为智能型制动器 。所谓智能型 制动器 ,就 是利用智能型驱动器控制输入电压的频率 ,从 而间接地 控制制动力矩和制动时间。智能型驱动器实际上是在 电 控 单 元 ECU 的控 制 下 ,根 据 实 际 的制 动 工 况 ,输 出 所 需 的 制动 力 的设 备 。对 于起 重 机常 用 的 常 闭式 电液 推 杆 制 动 器 ,采 用 的是 变 频 方 式 ,调 整 推 杆 的 驱 动 电机 转 速 ,令
埃斯顿折弯机autolist仿真软件安装教程

埃斯顿折弯机autolist仿真软件安装教程
安装前准备:埃斯顿折弯机autolist仿真软件的安装需要满足以下条件:
1. 系统要求:支持Windows7/8/10操作系统;
2. 硬件要求:至少需要4GB的内存和20GB的磁盘空间;
3. 安装包:确保已经下载了埃斯顿折弯机autolist仿真软件的安装包。
以下是埃斯顿折弯机autolist仿真软件的安装教程:
1. 双击打开安装包,进入安装向导界面。
2. 阅读软件许可协议,若同意点击“我接受协议”选项,然后点击“下一步”。
3. 选择软件的安装路径,可以使用默认路径,也可以自定义路径。
点击“下一步”。
4. 选择组件,可以选择安装所需的组件,也可以使用默认的组件。
点击“下一步”。
5. 选择开始菜单文件夹,可以使用默认的文件夹,也可以自定义文件夹名称。
点击“下一步”。
6. 选择添加桌面图标和快捷方式的选项,可以选择需要添加的选项。
点击“下
一步”。
7. 确认安装选项,点击“安装”开始安装。
8. 等待安装完成。
9. 安装完成后,勾选“打开埃斯顿折弯机autolist仿真软件”选项,然后点击“完成”。
10. 等待软件初始化。
11. 软件初始化完成后,即可开始使用埃斯顿折弯机autolist仿真软件。
电铲工作装置EDEM Adams Simulink联合动态仿真

电铲工作装置EDEM Adams Simulink联合动态仿真电铲是一种用于挖掘和搬运土石等物料的工程机械设备,广泛应用于矿山、建筑工地和水利工程等领域。
电铲的工作装置是其核心部件,直接影响到电铲的挖掘效率和运行稳定性。
为了更好地理解电铲工作装置的动态特性,工程师们常常利用动态仿真技术进行研究和优化。
本文将介绍一种基于EDEM和Adams Simulink联合动态仿真的方法,以及其在电铲工作装置设计中的应用。
EDEM是一种专门用于颗粒动力学仿真的软件,可以模拟颗粒物料在不同工况下的运动和相互作用。
Adams Simulink是一种多体动力学仿真软件,可以模拟机械系统的运动和力学特性。
将EDEM和Adams Simulink两种软件进行联合仿真,可以更加真实地模拟电铲在挖掘和搬运过程中的工作情况,有助于工程师深入理解电铲工作装置的动态特性和工作原理。
我们需要建立电铲工作装置的三维模型。
对于电铲来说,其工作装置主要包括铲斗、铲杆和升降机构等部件。
利用EDEM软件可以对铲斗进行颗粒动力学仿真,模拟挖掘物料的过程,包括物料的流动、堆积和碰撞等。
利用Adams Simulink软件可以对铲杆和升降机构等部件进行多体动力学仿真,模拟电铲的各个部件在不同工况下的运动和力学特性。
我们可以利用联合动态仿真技术进行电铲工作装置的设计优化。
通过对电铲在不同工况下的动态特性进行仿真分析,可以找到电铲工作装置的优化方案,包括改进铲斗结构、优化铲杆长度和升降机构设计等措施,以提高电铲的挖掘效率和运行稳定性。
利用EDEM和Adams Simulink联合动态仿真技术可以更加真实地模拟电铲工作装置的动态特性,有助于工程师深入理解电铲的工作原理和优化设计方案。
相信随着这一技术的不断发展和应用,将为电铲工作装置的研究和设计提供更加有效的工具和方法。
abb机器人仿真步骤

作图步伐:之迟辟智美创作1、双击桌面ROBOTSTUDIO 5.15图标,如下图所示.点击左侧选项栏,选择授权.然后选择激活向导,选择如下:2、点击创立文件,呈现如下界面.3、选择机器人模型,点击ABB模型库,呈现如下界面,选择IRB2600.把承重能力改为20KG.4、然后点击导入模型库,下拖选择MYTOOL后,然后把左侧边mytool工具拖到IRB2600-20-165-01,机器人上自动装置了喷头工具.5、然后点击机器人系统菜单,选择从规划创立系统.在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下.在主菜单中,一定要修改工具,把原始的tool10改为mytool.或者,在放入机器人时,即完成此项设置,可以不需要修改此项.一直选择下一个,即可胜利.胜利后,屏幕右下角酿成绿色.5、选择建模,在菜单中选择固体,再选择矩形体.6、选择矩形体后,设置矩形体的长宽高参数为400、500、400后,点击创立,后关闭,即可在屏幕上看到矩形体.在此项中选择左侧规划后,双击部件1,修改名称为box. 7、点击菜单中年夜地坐标中的移动,即可移动矩形体.此项中一定要注意看俯视图,使正方体在机器人运动范围内,否则犯错.8、点击基本菜单中的路径.一种路径就设置为PATH10,如果有其他,就要多设置几个路径.后选择捕捉末端和手动线性,并把屏幕右下方的几个参数设置为MOVEJ,V300,Z为fine,准备设置示教指令.9、做6个示教指令,第一个和最后一个为MOVEJ,其他都为MOVEL.每移动一个点,点一次示教指令.10、设置完示教指令后,点击基本菜单下同步,选择同步到VC然后,所有同步下选项都选择,点击确定即可.11、然后选择仿真菜单.首先点击仿真设定,把原有路径删除,把新的路径添加到主队列中,然后确定.12、设定好后,点击播放,即可进行仿真.13、如需要录像,则应该先点击仿真录像,后在点击播放,即可进行仿真录像.14、最终保管和打包.先点击文件菜单,然后选择保管.保管后,在点击“共享”,后选择第一个选项“打包”.即可完成文件法式打包.至此,所有过程完成.。
simulink与AMESim联合仿真
Simulink与AMSIM联合仿真的方法虽然随着新材料、电机技术、控制学和先进制造技术等的发展,出现了用以取代目前所依赖的功率液压传动的功率电传技术,但是在现阶段,液压伺服作动系统仍然占据航空作动系统的主导地位。
主要原因是液压伺服作动系统具有其它伺服作动系统无法比拟的优势,具有容易得到大功率输出、高功率/重量比、响应快和低俗特性好的特点。
航空液压作动系统是目前飞机上最成熟的液压作动方式,大多直接采用飞机的中央液压源提供的恒压油,通过(伺服)阀来控制执行机构的双腔流量完成指令动作,精度高、响应快。
航空也要作动系统根据其发展历程一般分为以下四类:液压助力器、电液指令作动器、复合式伺服作动器和直接驱动阀式伺服作动器。
本文将主要对其关键技术进行深入分析,并提出关键技术的解决途径。
1 建模仿真技术由于对航空液压作动系统自身结构比较复杂,对其自身的性能要求比较高,需要满足包括输出载荷、中立位置、额定行程、最大行程、行程余量、额定速度、最大速度、极限载荷、主控阀剪切力、门限、位置精度和滞环等的静态特性,满足包括频率响应和阶跃响应的动态特性,以及稳定性和阻抗特性要求。
银次,在研制航空液压作动系统的过程中,对其进行建模仿真非常重要。
通过仿真,可以对所设计的作动器性能有全面的了解,便于改进和完善设计。
传统的建模仿真分析手短一般采用数学推到加Simulink仿真的方式进行。
Simulink是美国Match Works公司开发的MA TLAB软件的可视化仿真环境,具有丰富的线性/非线性、连续/离散等控制系统仿真功能模块,具备神经网络、模糊控制等一系列先进的智能控制工具箱,非常适合进行航空液压作动系统的建模与分析,但其前提是基于用户建立的数学模型和其自身提供的结构参数化的功能模块。
而这已无法满足现在对仿真高精度和高准确度的要求。
而且Simulink本身没有专门针对液压流体仿真的工具箱,用户使用时要自己建立模型。
AMESim是法国Imagine公司推出的基于功率键合图的液压/机械系统建模、仿真机动力学分析软件,采用图形化的物理建模方式,具有复杂液压元件结构参数化的功能模块,也同样非常适合进行航空液压作动系统的结构参数化建模与分析,但是他的控制系统仿真功能模块相对较少,不具备神经网络、模糊控制等一系列先进的智能控制工具箱。
Matlab中的Simulink和SimMechanics做仿真
这里我们利用Matlab中的Simulink和SimMechanics做仿真,那么先来看看相关的资料。
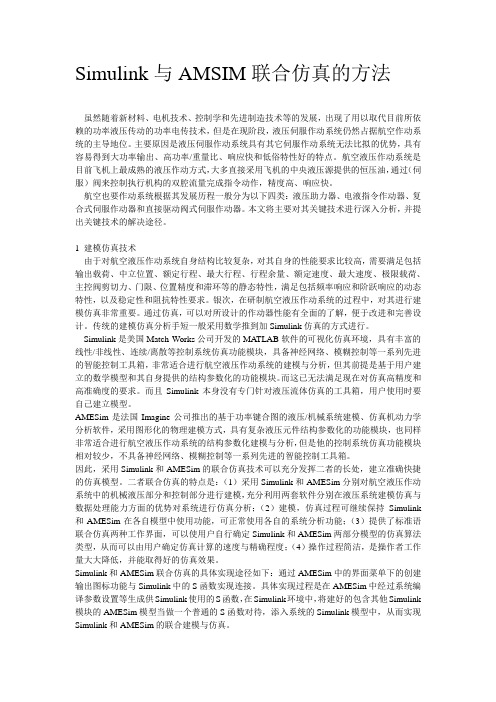
SimMechanics——机械系统建模和仿真SimMechanics 扩展Simscape™ 在三维机械系统建模的能力。
用户可以不进行方程编程,而是借助该多刚体仿真工具搭建模型,这个模型可以由刚体、铰链、约束以及外力组成。
自动化3-D动画生成工具可做到仿真的可视化。
用户也可通过从CAD系统中直接导入模型的质量、惯量、约束以及三维几何结构。
Real-Time Workshop可以对SimMchanics模型进行自动化C代码生成,并在硬件在回路仿真过程中可以使用生成的代码而不是硬件原型测试嵌入式控制器。
SimMechanics可以用于开发悬架、机器手臂、外科医疗设备、起落架和大量的其它机械系统。
用户也可以在SimMechanics环境下集成其它的MathWorks物理建模工具,这样做可以实现更加复杂跨领域的物理建模。
特点:●提供了三维刚体机械系统的建模环境●包含了一系列分析机械运动和设计机械元件尺寸的仿真技术●三维刚体可视化仿真●SimMechanics Link utility,提供Pro/ENGINEER 和SolidWorks CAD平台的接口并且也提供了API函数和其它CAD平台的接口●能够把模型转化为C代码(使用Real-Time Workshop)●由于集成在Simulink环境中,因此可以建立高精度、非线性的模型以支持控制系统的开发和测试。
强大功能:搭建机械系统模型使用SimMechanics用户仅需要收集物理系统信息即可建立三维机械系统模型。
使用刚体、坐标系、铰链和作用力元素定义和其它Simulink模型直接相连的部分。
这个过程可以重用Simulink模型以及扩展了SimMechanics工具的能力。
用户还可把Simulink模型和SimMechnics模型集成为一个模块,并可封装成可在其它模型中复用的子系统。
电铲工作装置EDEM Adams Simulink联合动态仿真

电铲工作装置EDEM Adams Simulink联合动态仿真引言:电铲工作装置是大型挖掘机的重要组成部分,它通过一系列的动作来完成挖土、装载等作业任务。
为了确保电铲工作装置的稳定性和性能,需要进行动态仿真来验证和优化设计方案。
本文将介绍一种基于EDEM、Adams和Simulink的联合动态仿真方法,以验证电铲工作装置的性能。
一、电铲工作装置的工作原理电铲工作装置由挖斗、铲杆、翻转臂、回转系统、液压系统等部分组成。
在工作时,液压系统通过控制液压缸和液压阀来实现铲杆和挖斗的运动,同时通过驱动电机和齿轮来实现翻转臂和回转系统的运动。
整个过程需要保证各部件之间的协调运动,以完成挖掘、装载等作业任务。
二、EDEM的应用EDEM是一款基于离散元素方法(DEM)的颗粒流动模拟软件,其可以模拟颗粒材料在运动过程中的动力学行为。
在电铲工作装置的仿真中,EDEM可以模拟挖掘、装载等过程中土石颗粒的运动和互动,从而可以评估挖掘力、装载稳定性等性能指标。
三、Adams的应用Adams是一款多体动力学仿真软件,其可以模拟多体系统在力和运动学约束下的运动行为。
在电铲工作装置的仿真中,Adams可以模拟铲杆、挖斗、翻转臂等部件的运动,同时考虑挖掘力、惯性力、地形阻力等外部力的作用,从而可以评估各部件的受力情况和协调运动。
四、Simulink的应用Simulink是一款基于图形化建模的仿真软件,其可以模拟系统的控制逻辑和动态响应。
在电铲工作装置的仿真中,Simulink可以模拟液压系统的控制逻辑和动作响应,同时考虑液压缸、液压阀的压力、流量等特性,从而可以评估液压系统的动态性能。
五、联合动态仿真方法为了更真实地模拟电铲工作装置的工作过程,可以将EDEM、Adams和Simulink进行联合动态仿真。
使用EDEM模拟挖掘、装载等过程中土石颗粒的运动和互动,得到挖掘力、装载稳定性等性能指标;然后,将这些结果作为Adams的输入,模拟铲杆、挖斗、翻转臂等部件的运动以及受力情况;将Adams的结果作为Simulink的输入,模拟液压系统的控制逻辑和动作响应,评估液压系统的动态性能。
自动化专业学生必备软件
自动化专业学生必备软件引言概述:随着科技的不断发展,自动化技术在各个领域得到了广泛应用。
作为自动化专业的学生,掌握一些必备的软件工具是非常重要的。
本文将介绍自动化专业学生必备的软件,匡助学生更好地学习和应用自动化技术。
一、仿真软件1.1 MATLABMATLAB是一款功能强大的数学计算和仿真软件,广泛应用于自动化领域。
它提供了丰富的工具箱,可以进行各种数学计算、数据分析和图形绘制。
自动化专业学生可以利用MATLAB进行系统建模和仿真,进行控制算法的设计和验证。
1.2 SimulinkSimulink是MATLAB的一个重要工具箱,用于进行动态系统的建模和仿真。
它提供了直观的图形界面,方便学生进行模型的搭建和参数调整。
通过Simulink,学生可以摹拟各种自动控制系统,验证控制算法的性能,并进行系统优化。
1.3 LabVIEWLabVIEW是一款图形化编程软件,适合于各种测量、控制和自动化任务。
它提供了丰富的工具和函数库,可以方便地进行数据采集、信号处理和实时控制。
自动化专业学生可以利用LabVIEW进行实验数据的采集和分析,实现各种自动化系统的控制与监测。
二、编程软件2.1 C/C++C/C++是自动化专业学生必备的编程语言,广泛应用于嵌入式系统和控制系统的开辟。
学生需要掌握C/C++的语法和基本编程技巧,能够编写高效、稳定的控制程序。
通过编程,学生可以实现各种控制算法、数据处理和通信协议的实现。
2.2 PythonPython是一种简单易学的编程语言,具有丰富的科学计算和数据处理库。
自动化专业学生可以利用Python进行数据分析、机器学习和控制算法的实现。
Python 还可以与其他软件工具进行集成,扩展其功能。
2.3 PLC编程软件PLC(可编程逻辑控制器)是自动化领域常用的控制设备,学生需要掌握PLC 编程软件,如Siemens的STEP 7或者Rockwell的RSLogix。
通过PLC编程软件,学生可以进行逻辑控制程序的编写和调试,实现各种自动化系统的控制。
automove和autoitem详细使用说明
automove和autoitem详细使用说明韩国bot 的automove 和autoitem详细使用说明 --yfzh2012 automove 和autoitem 是半自动操作.所以手动登录之后你的角色(char)不会做任何事情,所有的任务都要通过按键和命令方式进行。
automove 也需要设置相关每个角色配置文件,否则采用的是默认角色配置文件,通常automove 只用来练小号,倒装备等,一般无需特别设置,采用默认角色配置文件也没什么问题。
一、automove 登录后角色状态说明1、automove 登录后为标准单人模式,顶部菜单为金色automove 字样,可以采用, 来回切换到autoitem 模式倒装备,但是不能切换到autohunt(autohunt 是全自动功能)。
标准模式,仅仅能支持BOTASS 界面按键设置里的default 加automove 按键功能,主要的功能是:自动map、半自动任务寻路,半自动踩WP, 自动打怪当前地图,自动做主要任务。
强调下 default 按键设置里最常用的:重新加载脚本a、单人map 功能键自动寻路,可以在城外任何场景,顶部菜单出现当前地图的任务闪烁(不会超过2个任务地点)时使用,按一次就是选择自动去 1 号目标地,连击2次就是去2号目标地。
小键盘<6> 只能在城里使用,自动开始全部踩wp(只会从当前act 开始)。
小键盘 <7> 只能在城外使用,自动去前一个wp 小键盘 <8> 只能在城外使用,自动到当前的wp小键盘 <9> 只能在城外使用, 自动去下一个wp大键盘 <\> 自动找附近的神殿大键盘即边上的windows 菜单功能快捷键自动抓取神殿(没什么用已经走到边上自己点下就行了)b、自动打怪练级小键盘 <4> 开启主动打身边怪物模式,否则只会傻站。
大键盘的句号 <.> 按一次是自动清除身边25码范围的怪物,双击是清除当前地图区域的所有怪物(自动练级)大键盘 <-> 和<=> 用来加减小鸡血限的百分比,按一次1%,双击是全满或者全减100%自动做主要13个任务,可以在botass 的automove 中自动做任务选项进行设置。
四足机器人Adams与Matlab联合仿真设置
Matlab与adams联合仿真设置1 模型设置 (2)2 运动副设置 (3)3 驱动与力设置 (4)4 检验设置是否正确 (7)5 Adams中与Matlab联合仿真的设置 (8)6 Matlab中与Adams联合仿真的设置 (12)7 联合仿真结果显示 (14)1 模型设置在soildworks建好四足整体模型,开始时做一个简化版的模型就可以了,另存为.x_t格式。
打开adams,点击文件->导入,在文件类型中选择“Parasoild”,双击“读取文件”空白处,打开选取文件界面,找到保存的四足模型,选择。
在模型名称的空白栏处右击,选择模型->创建,命名为“ghost”。
点击确定(图1.1)。
读取的文件目录中不要出现中文,否则会出现错误。
(图1.1)(图1.2)导入后的模型显示如图1.2。
点击界面右下角的球形图标,将模型转化为实体。
(图1.3。
倒数第四个)点击界面左上的设置->单位,将长度量纲改为毫米。
点击设置->重力,将重力设置为Y轴方向-9806.65。
点击界面左侧框图浏览->物体的左侧加号,出现模型各个部件的名称(图1.4)。
由于将模型从soildworks导入adams中时会损失质量信息,接下来将设置每个部件的质量。
双击某一部件,弹出设置界面(图1.5),在“定义质量方式”中选择“几何形状和密度”,随后设置密度。
由于实际中四足的腿的质量很小,大部分质量都集中在身体的铝架上,所以将腿部结构的的密度设为(200.0(kg/meter**3)),将身体部分的密度设为(1200.0(kg/meter**3))(图1.5)(图1.4)逐个双击部件设置密度信息。
完成后可在某个部件上右击,选择信息,查看该部件的信息(图1.6)。
(图1.6)统计质量信息如下:小腿长:0.0435kg*4 、小腿短:0.0252kg*4、大腿0.0132kg*8身体:5.79kg.总质量:6.18kg。
matlab移动机器人建模
matlab移动机器人建模Matlab建立机器人模型主要有两个方面(当然不排除有其他的,只说知道的):Rigidbody tree 坐标系模型Simsacpe 物理模型建立rigidbody tree模型主要是为了能够使用matlab自带的一些机器人函数,减少们的工作量,因为这个建模方法本质上是定义好了机器人内部的坐标系关系。
比如说Matlab 2019b里面就自带了帮你计算机器人FK,IK以及动力学方程的函数。
这样的话你只需要知道如何正确地使用这些函数,你就不需要自己推导那些复杂的正逆运动学动力学方程,直接开始仿真。
下图展示了Matlab robotics system toolbox里面的一些功能模块而Simscape 模型主要是模型可视化,方便你仿真时看到模型是如何响应和如何运动的。
个人目前的使用习惯是结合两个建模方法,就是说先建好rigidbody tree模型以能够使用自带函数,再得到Simscape模型来可视化仿真。
在仿真的时候前面正逆运动学,动力学算法部分用rigidbody tree 模型结合matlab函数得到轨迹信号,控制信号等等,接着在模型部分用Simscape 模型来代表们实际的机器人模型接收控制信号进行仿真。
那么问题来了怎么得到rigidbody tree模型?rigidBodyTree直接建模看这里又怎么得到simsacpe模型?你要是固执,rigidbody tree 模型和simscape 模型都可以从最基本的坐标系,基本结构块生建出来,rigidBodyTree还好说,simscape模型直接建模还是有点恐怖了(相信没有人会这么做)。
Matlab 和solidworks 提供了很方便的模型转化功能。
方便们通过solidworks机械模型来转换出们需要的matlab模型。
转换方向有这几种:solidworks 机械模型直接转换成simscape 模型。
solidworks 转换成urdf模型,再从urdf模型分别转换成rigidbody tree模型以及simscape模型。
大型曲面自适应研抛机器人运动学仿真

4 研抛机器人 的运 动学仿真
41研抛 工具 的 自适应仿 真 .
工具系统沿 自由曲面运 动, 和 y方向都 曲率变化时, 对工
机器人位姿除 了由线速度 、 角速度决定外 , 还受曲面 的影响。
设计的工具系统绕着 和 Y两个轴转动 , 在实际的加工过程
采取 的方法是使工具系统的速 中, 工具系统与 自由曲面工件啮合时的切平面与 XO Y平面的夹角 具系统的空间运动情况进行仿真。 y方 向的曲率 变化成一定 角度 后 的变化值可 以通过绕两个轴分别 转动的角度 O和 值来进行计 度进 给方 向与工件表 面 、 l ( 分别取与 x方 向夹角为 3。4 。 , O 、5 )仿真工具系统对 自由曲面的 算 。研抛工具对 自由曲面工件的 自适应性主要是通过工具系统的
r b ti e tb i e y P o n i e r a t , e a a t e poih n o o d i o e sn y tms i o o s sa l h d b r / g n e. n i t d p i l i g r b ta t pr c s i g s se s s E Me me h v s n s su id a d a ma h ma is mo e s e t l h d, d k n ma is smu a in W S e e u e a e n Ad ms t d e n t e t d fi sa i e a i e tc i l o a x c td b s d o a c b s n t wi t b∞ w l. i h r s l r v h e r b ta d i o l o ih n y tm o d i y a cp r t Mal h a e 1wh c e ut p o e t a t o o t to l i g s s e i g o d n mi e — s t h n s p s s n
AutoMod系统建模与仿真实验指导书
AutoMod
系统建模与仿真
实验指导书
北京邮电大学 自动化学院 北京亿特克科技有限公司 答案整理
目录
概述 AutoMod 软件简介和仿真试验综述 .............................................................................. 1 实验一 简单流水作业线仿真 ............................................................................................... 8 实验一 简单流水作业线仿真详细解析 ........................................................................... 11 1 新建一个模型 ............................................................................................................. 12 2 定义各种实体单元 ..................................................................................................... 13 3 绘制模型平面布置图 ................................................................................................. 20 4 定义 Source File .......................................................................................................... 21 5 设定 Run Control ......................................................................................................... 22 6 模型运行 ..................................................................................................................... 22 7 查看运行结果 ............................................................................................................. 25 8 模型优化 ..................................................................................................................... 26 附录 Source File 的内容 ................................................................................................ 27 实验二 传送带系统仿真 ..................................................................................................... 30 实验二 传送带系统仿真详细解析 ................................................................................. 33 1 创建一个新的模型 ...................................................................................................... 33 2 定义各种实体单元 ...................................................................................................... 38 3 绘制模型平面布置图 ................................................................................................. 41 4 定义 Source File .......................................................................................................... 41 5 设定 Run Control ......................................................................................................... 42 6 定义 Business Graphics ............................................................................................... 42 7 模型运行 ..................................................................................................................... 44 8 查看运行结果 ............................................................................................................. 45 9 模型优化 ..................................................................................................................... 46 附录 Source File 内容 ..................................................................................................... 46 实验三 循经运动系统仿真 ................................................................................................. 49 实验三 循径运动系统仿真详细解析 ............................................................................. 53 1 创建一个新的模型 ..................................................................................................... 53 2 定义 Path Mover 子系统 pm ...................................................................................... 55
网络收集的 adams+simulink仿真错误及解决方案

经验之谈:如何顺利实现adams和simulink的联合仿真?论坛中有关adams和simulink联合仿真的帖子不少,部分是成功者的经验,多数是初学者的疑惑。
怎么安装和找到control模块,怎么在control中生成必需的中间文件,为什么仿真会失败?本人也曾对这些问题困惑过,经过一番摸索,积累了一点经验,愿与大家商讨。
对于第一个问题,我想就不必多说了.对于第二个问题可以参考郑建荣的ADAMS虚拟样机技术入门与提高第十三章机电一体化系统仿真部分,书中有两个问题需要注意:(1)书中介绍的ADAMS版本好像是10.0的,对于使用12.0的有一些差异:在Plant Export设置中无法直接选择输入输出变量control_torque、azimuth_position、rotor_velocity,它们分别由专门的宏tmp_MDI_PINPUT和tmp_MDI_POUTPUT表示.(2)天线仰角的方位角似乎应该是elevation_position,而不是azimuth_position,后者是天线支撑的转角。
其它按文中所述步骤进行,File Prefix栏可随便写,不必一定用ant_test,最后在ADAMS的当前目录下生成四个文件:ant_test.cmdant_test。
admant_test.acfant_test.m第三个问题基本上是由于没有正确设置路径,找不到所需的文件造成的:~),这也说明了control模块在设计时没有很好地考虑健壮性问题。
具体来说simulink在开始仿真时要找到以下这些文件:1。
上述生成的文件,主要是ant_test.m和ant_test.cmd,ant_test。
m用于在simulink中对control模块环境和一些参数进行初始化,它必须在仿真前执行;ant_test.cmd是天线模型定义文件,由于这里ADAMS是作为simulink创建的一个子进程而被启动的,它所需的模型文件名由simulink的调用参数传过来的,所以simulink要能够定位ant_test.cmd(我一开始把它放到adams当前目录下,频频失败)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Alon Y. Levy
Knowledge Systems Laboratory Stanford University Gates Bldg. 2A, Rm. 246 Stanford, California 94305 kes@
Richard Fikes
Knowledge Systems Laboratory Stanford University Gates Bldg. 2A, Rm. 256 Stanford, California 94305 iwasaki@
1.1 Motivations
The ability to analyze a physical system using a model of its behavior is an important skill required of engineers. Equally important, if not more, is the ability to formulate a model that is appropriate for one's purpose. However, the problem of how to build a good model is much less understood than that of how to analyze a model once it is formulated. Most computational tools intended to assist in analysis of model behavior rely on the user to construct a model. The ability to formulate an appropriate model would enhance the utility of such systems greatly by making it much easier to take advantage of their analysis capabilities. For example, though simulation is a very useful tool for evaluating design alternatives in engineering design, it is not currently used as freely as it could be because of the cost involved in formulating a model, performing a simulation, and interpreting the results. If a system could quickly formulate an appropriate model for analyzing the particular aspect of 2
Abstract
keywords: model formulation, relevance reasoning, qualitative reasoning, simulation
1
1he conceptual objects humans study instead of studying the real thing. Models themselves are products of our intellectual endeavor, and constructing an appropriate model for a problem is a challenging problem solving task in itself. Models are constructed for various reasons. For example, simpli ed models of the real world are constructed because the real world is too complex to comprehend in its entirety, and models of a device being designed are constructed in order to understand the behavior of the device by experimenting with the model even before the device is actually built. There are as many possible models of a given subject of study as there are reasons for constructing models. There is no one \true" or \correct" model since any model is necessarily an abstraction and the goodness of a model depends on one's goal, i.e., the question one wishes to nd an answer to by constructing and studying a model. For a model to be useful, it must contain enough information to answer the question with su cient precision and accuracy without containing too much unnecessary detail. Constructing such a model requires deciding what information could be relevant for answering the questions and, therefore, should be included in the model. Thus, model formulation can be considered as a special case of a more general problem of reasoning about relevance of knowledge for a given goal. Researchers such as Subramanian and Genesereth 30] and Levy 16] have proposed general frameworks for reasoning about relevance of knowledge. In this paper, we present an application of one of them, namely Levy's, to the problem of model formulation. We propose an e cient procedure, based on the general framework, for formulating a model for the purpose of simulation of physical devices. For any model formulation procedure to be useful, the generated model must be adequate for answering the given query and, at the same time, as simple as possible. In later sections, we will de ne formally the concepts of adequacy and simplicity and show that the procedure in fact generates an adequate and simplest model.
Yumi Iwasaki
August 6, 1997
Constructing an appropriate model is a crucial step in performing the reasoning required to successfully answer a query about the behavior of a physical situation. In the compositional modeling approach 7], a system is provided with a library of composable pieces of knowledge about the physical world called model fragments. The model construction problem involves selecting appropriate model fragments to describe the situation. Model construction can be considered either for static analysis of a single state or for simulation of dynamic behavior over a sequence of states. The latter is signi cantly more di cult than the former since one must select model fragments without knowing exactly what will happen in the future states. The model construction problem in general can advantageously be formulated as a problem of reasoning about relevance of knowledge that is available to the system using a general framework for reasoning about relevance described in 21, 16]. In this paper, we present a model formulation procedure based on that framework for selecting model fragments e ciently for the case of simulation. For such an algorithm to be useful, the generated model must be adequate for answering the given query and, at the same time, as simple as possible. We de ne formally the concepts of adequacy and simplicity and show that the algorithm in fact generates an adequate and simplest model.