8255的相关内容
用8255和8253使发光二极管按一定规律轮流点亮

《微机原理与接口技术》课程设计课题用8255和8253使发光二极管轮流点亮学院计算机与信息学院班级物联网工程10-1班姓名吴超学号指导老师石磊高妍妍日期2013.1.5微机原理与接口技术课程设计班级:物联网工程姓名:吴超学号:课程设计名称用8255和8253使发光二极管按一定规律轮流点亮课程设计要求发光二极管点亮方式:将发光二极管分为n组,每组12/n个灯管,从左到右依次点亮这些灯管,每组灯管发光时间为t。
设有4种发光组合:(1)n=12,t=1s:每个灯管间隔1s循环点亮。
(2)n=12,t=2s:每个灯管间隔2s循环点亮。
(3)n=6,t=1s:每两个灯管间隔1s循环点亮。
(4)n=6,t=2s:每两个灯管间隔2s循环点亮。
这四种方式分别对应按键“A”、“B”、“C”、“D”。
按对应按键后进入对应方式。
退出:按“E”键后,所有灯管灭,七段数码管显示初始“P.”状态。
课程设计目的1掌握《微机原理与接口技术》的内容2掌握可编程并行接口8255A,可编程定时/计数器8253,及数码管的用法和原理3掌握汇编语言程序的设计硬件设计一.系统所选用的个芯片介绍1.Intel8253可编程定时/计数器2.可编程并行接口芯片82553.八段数码管显示二.系统选用各芯片的工作方式1.Intel8253可编程定时/计数器工作方式2.可编程并行接口芯片8255工作方式总体设计一.基本的工作原理二.硬件总体的设计1.系统总的方案2.键盘及其功能的定义3.系统所实现的功能三.软件总体设计1.程序代码(带注释)2程序分析系统连线说明PB0-L8PB1-L7PB2-L6PB3-L5PB4-L4PB5-L3PB6-L2 PB7-L1PC0-L12PC1-L11PC2-L10PC3-L9程序代码见第7页课程设计感想见第20页参考文献见第20页前言《微机原理与接口技术》是计算机,电子等专业的一门专业基础课程。
在课程体系中占有重要的地位课程设计的内容不仅很好的配合了所学习的内容及实验,而且通过课程设计将平时所学的内容运用到实际应用中。
微机原理 可编程接口芯片8255A及应用

第七章
参考程序片断: MOV AL, 10010000B ; 控制字 OUT 0F6H, AL ; 写入控制字 LP: IN AL, 0F0H ; 从A口读入开关状态 OUT 0F2H, AL ; B口控制LED,指示开关状态 CALL DELAY1S JMP LP
思考:
若地址大于FFH,则程序应该怎么改?
dp g f e d c b a
g
d
b
c
DP
g f e d c b a 1
阴 极
0
1
1
0
1
36
1
0
第七章
十六进制数共阴极的七段显示码表
十六进制数字
0 1 2 3 4 5 6
七段显示码
3FH 06H 5BH 4FH 66H 6DH 7DH
十六进制数字
8 9 A b C d E
七段显示码
7FH 6FH 77H 7CH 39H 5EH 79H
内部逻辑 6
端口C (低4位)
B 组B 端口
PC3~PC0
(8位)
PB7~PB0
CPU接口
外设接口
第七章
8255A与系统的连接示意图
7
第七章
3、各部分功能简介
数据端口
A、B、C:可用来和外设传送信息;每
个端口8位,通过编程设定其为输入口或输出口;
工作方式 0 1 8255数据端口功能表 B口 A口 C口
教材第九章内容
第七章
可编程外围接口芯片8255A及其应用
7.1 8255A的工作原理
一、8255A的结构和功能
二、8255A的控制字及初始化编程 三、8255A工作方式和C口状态字
8255电子钟课程设计

8255电子钟课程设计一、课程目标知识目标:1. 理解8255可编程定时器/计数器的工作原理,掌握其在电子时钟设计中的应用。
2. 学会使用8255芯片与微控制器(如8051)的接口技术,并能正确编程控制电子钟的时、分、秒显示。
3. 掌握电子时钟的时间计数与显示的基础算法,能够运用所学知识设计简单的电子时钟程序。
技能目标:1. 培养学生动手能力,通过搭建8255电子时钟电路,提高学生的电路连接与调试技巧。
2. 培养学生编程能力,让学生能够独立编写8255控制电子时钟的程序代码,并实现功能。
3. 培养学生问题解决能力,面对电子时钟设计中的问题,能够进行故障排查和程序优化。
情感态度价值观目标:1. 培养学生对电子技术和编程的兴趣,激发学生的学习热情和创新精神。
2. 培养学生团队协作精神,通过小组合作完成课程设计,增强集体荣誉感和责任感。
3. 培养学生科学严谨的态度,在设计过程中注重细节,遵循操作规程,确保安全与可靠性。
本课程针对高年级电子信息技术或计算机科学与技术相关专业学生,结合教材内容,注重理论联系实际,旨在提高学生电子电路设计、编程及实际应用能力。
课程目标明确、具体,可衡量,为后续教学设计和评估提供依据。
二、教学内容本课程教学内容紧密围绕课程目标,结合教材以下章节:1. 8255可编程定时器/计数器原理与功能- 8255芯片内部结构- 工作模式及时序分析- 接口技术及其在微控制器中的应用2. 电子时钟基础知识- 电子时钟原理概述- 时、分、秒计数与显示方法- 电子时钟程序设计基础3. 8255电子时钟设计与实现- 电路设计与搭建- 程序编写与调试- 故障排查与优化教学内容安排与进度:第一周:8255可编程定时器/计数器原理学习,接口技术了解。
第二周:电子时钟基础知识学习,程序设计基础掌握。
第三周:分组讨论,确定电子时钟设计方案,开始电路搭建与程序编写。
第四周:电路调试,程序优化,完成8255电子时钟设计。
单片机实验五 8255 PA口控制PB口(学生)
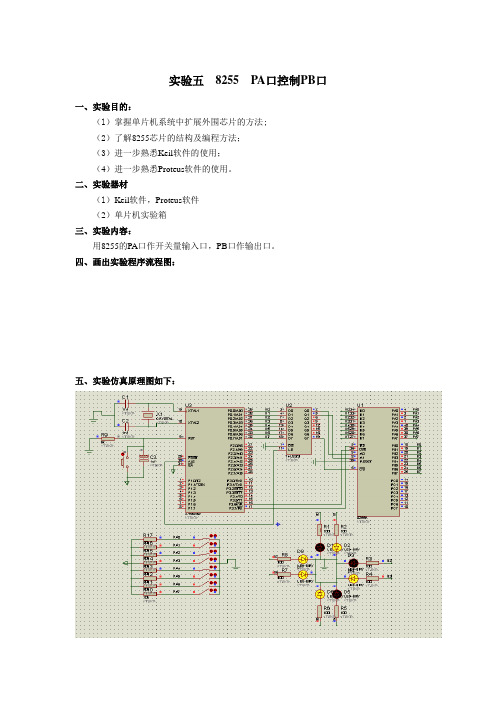
实验五8255PA口控制PB口
一、实验目的:
(l)掌握单片机系统中扩展外围芯片的方法;
(2)了解8255芯片的结构及编程方法;
(3)进一步熟悉Keil软件的使用;
(4)进一步熟悉Proteus软件的使用。
二、实验器材
(l)Keil软件,Proteus软件
(2)单片机实验箱
三、实验内容:
用8255的PA口作开关量输入口,PB口作输出口。
四、画出实验程序流程图:
五、实验仿真原理图如下:
六、实验接线图:
七、实验步骤:
8255PA口接Kl~K8,PB口接L1~L8运行程序,按K1~K8,观察L1~L8发光二极管是否对应点亮。
八、写出程序清单和注释:
九、思考题
用8255的PA口作输出口,PB口作开关量输入口,仿真原理图应该做怎么样的变化,同时程序该怎么改?
ORG 0000H
MOV DPTR,#8003H
MOV A,#90H
MOVX @DPTR,A
LOOP0: MOV DPTR,#8000H
MOVX A,@DPTR ;PA口读入
INC DPTR
MOVX @DPTR,A ;PB口输出
SJMP LOOP0
由于联线关系,试将程序改成PB口读入,PA口读出
在8255的控制字中,相关定义位的指向为:第0位为C口下半部,第1位
为B口,第3位为C口上半部,第4位为A口,其定义均为1表示输入,0表示输出。
微机课程设计8255

微机课程设计8255一、课程目标知识目标:1. 让学生理解并掌握8255可编程并行接口芯片的基本工作原理。
2. 让学生掌握8255芯片的编程控制方法,包括控制字的理解与设置。
3. 使学生能够运用8255芯片实现数据的输入/输出功能,理解并行通信的概念。
技能目标:1. 培养学生运用8255芯片进行微机接口设计的实践能力。
2. 培养学生阅读并理解8255相关的技术文档,提高学生的技术资料检索与应用能力。
3. 通过课程实验,提高学生的问题分析和解决能力,加强团队协作和动手操作技能。
情感态度价值观目标:1. 培养学生对微机接口技术的兴趣,激发学生主动探索微机硬件知识的热情。
2. 增强学生对技术学习的自信心,培养学生面对复杂问题时积极乐观的态度。
3. 强化学生的工程伦理观念,认识到科技发展对社会的责任和影响。
分析课程性质、学生特点和教学要求,本课程目标具体、明确,旨在通过理论讲解与实践操作相结合的方式,使学生在掌握8255接口芯片知识的同时,能够将所学应用于实际的微机接口设计之中。
课程目标分解为具体的学习成果,便于通过课堂讲解、实验操作、项目设计等教学活动,进行有效的教学设计和学习成果的评估。
二、教学内容根据课程目标,本章节教学内容主要包括以下部分:1. 8255芯片基础知识:- 8255芯片的结构与功能- 8255芯片的工作模式- 8255芯片的控制字设置2. 8255芯片编程控制:- 编程控制的原理与方法- 8255芯片的初始化编程- 8255芯片的数据输入/输出编程3. 并行通信原理与应用:- 并行通信的基本概念- 8255芯片在并行通信中的应用实例- 并行通信的接口设计4. 实践操作与课程设计:- 8255芯片的接口电路设计- 课程设计项目:基于8255的并行通信系统设计- 实践操作:8255芯片的编程与调试教学内容依据教材章节进行安排,具体包括:- 教材第3章第2节:8255可编程并行接口芯片- 教材第4章第1节:并行通信接口设计- 教材第4章第3节:8255编程及应用实例教学进度按以下顺序进行:1. 理论讲解:8255芯片基础知识及编程控制(2课时)2. 实践操作:8255芯片的初始化编程与调试(2课时)3. 理论讲解:并行通信原理及8255在并行通信中的应用(1课时)4. 实践操作:并行通信系统设计课程设计(3课时)教学内容具有科学性和系统性,结合理论教学与实践操作,旨在帮助学生扎实掌握8255接口芯片的相关知识,并能够应用于实际项目设计中。
微机原理与单片机实验报告

微机原理与单片机实验报告Prepared on 22 November 2020北京联合大学信息学院实验报告课程名称:微型计算机原理学号:姓名:2012 年 6 月 9 日目录实验1 EMU8086模拟器的使用一实验要求利用EMU8086模拟器环境,完成创建源程序文件,运行调试,实验结果的查看二实验目的:熟悉EMU8086实验环境三 EMU8086环境:1 模拟器编辑窗口2 模拟器调试窗口四实验内容实验内容1:新建文件。
运行 emu80861. 新建文件:单击“新建”按钮,选择COM模板,在模拟器编辑窗口中输入如下程序代码:MOV AX, 1020HMOV BX, 2030HMOV AX, BXADD AX, BXMOV [BX], AXMOV [2032H], AXHLT2. 编译:单击“编译”按钮,对程序段进行编译;3. 保存:编译通过,单击“完成”按钮,将其以文件名“EXP1”保存在本地磁盘上。
4. 仿真:单击“仿真”按钮,打开模拟器调试窗口和源文件窗口。
5.在模拟器调试窗口中的寄存器组区,查看数据寄存器AX,BX,CX,DX;段寄存器CS,ES,SS,DS;指令指针寄存器IP;指针寄存器SP,BP;变址寄存器SI,DI;标志寄存器的值。
6.单击“单步前”按钮,单步执行程序,并观察每次单步执行后,相关寄存器值的变化。
7.单击“重载”按钮,将程序重载,并调整指令运行步进时延为 400毫秒,单击“全速”按钮,运行程序,8.程序运行之后,在程序调试窗口中,选择[view]/[memory],查看模拟器环境中,内存单元0700:0100开始的连续10个单元的内容9.将“存储器”中的地址改为0700:2030,查看开始的四个字节的内容,并思考其内容与程序的关联。
10.将“存储器”中地址改为1000:0100,并将从其开始的连续10个单元的内容改为55H。
实验内容2:运行范例在模拟器编辑窗口中1.点击典型范例2.选择:hellow,word程序,编译,运行,观察结果。
【课程思政优秀案例】《微机原理与接口技术》:思政科教相融的并行接口对分教学设计
课程思政优秀案例——《微机原理与接口技术》:思政科教相融的并行接口对分教学设计一、课程和案例的基本情况课程名称:微机原理与接口技术授课对象:通信工程、自动化、轨道交通信号与控制、电子科学与技术等专业,大三秋季学期开课。
课程性质:必修专业核心课课程简介:本课程是一门学习微机原理、汇编语言及硬件接口技术的专业基础课程,是电子信息类专业学生的主干课。
通过学习本课程,使学生理解微机系统的结构、工作原理和中断技术、DMA 技术,掌握汇编语言程序设计、存储器扩展设计和I/O接口扩展设计方法,培养运用微机分析问题与解决问题的思维方式,并初步具备微机应用系统的开发与设计能力。
课程以x86 CPU为主线,讲授和实验相结合。
主要包括:第1-2章介绍了微处理器结构、发展及应用;第3章讲解并练习指令系统;第4章讲解并上机汇编语言程序设计;第5-6章讲解存储器与中断技术;第4章讲解IO接口技术并做实验;第8-10章讲解DAC/ADC接口设计、总线与人机交互接口。
案例简介:并行接口8255属于课程章节7.2的内容,处于整个课程教学的后程第九周(课程总16周,含4周实验),主要内容为并行接口芯片8255A内部结构、外部引脚、工作方式及应用编程。
本案例讲授I/O并行接口基本技术,使学生掌握8255A内部结构,3种工作方式及其应用场景的选择,通过基本知识延伸出完全自主知识产权CBTC控制系统的工程应用,培养学生解决复杂工程问题的分析能力,并以我校科研团队经过三代人、三十年坚持不懈的努力,终于成功攻克了制约我国城市轨道交通发展的信号系统核心技术为例,塑造学生爱国荣校的高尚情怀和勇于担当敢于拼搏的奋斗精神。
二、案例蕴含的思政元素分析以自主研发的基于通信的列车控制系统CBTC系统为例,来设计思政与科教相融的案例。
课程内容并行接口芯片8255A及其应用的相关知识在CBTC系统中有实际应用,但是需要解决并行接口电路这种电子设备在轨道交通信号控制系统应用中的“故障-安全”等一系列复杂工程问题,由此引出完全自主知识产权CBTC系统的研发故事。
并行接口8255实验报告

并行接口8255实验一、实验目的1.掌握可编程并行接口电路8255的工作原理及初始化方法2.掌握8255在实际应用中的硬件连接及编程应用二、实验要求根据实验室现有条件,针对实验任务,设计实验方案并进行实现三、实验内容通过使用8255,8253实现一个倒计时设备,具体的方法是,用户逐个打开开关,然后8255定时读取开关状态并输出给二极管,当所有灯都亮起时,输出一个高电平给Gate0,对8253而言,要求每1s查看一次用户是否摁下了所有开关,一旦是这样蜂鸣器就会响起来,然后给8253送一个锁存命令,查看计数器1和计数器0当前的计数值,锁存两个计数值,便于后期的计算和数据处理。
四、实验线路图其中,8255的各个端口分别是:F0H,F2H,F4H,F6H 8253的各个端口分别是:F8H,F9H,FAH,FBH 五、实验程序清单CSEG SEGMENTASSUME CS:CSEGSTART:;初始化8255和8253MOV DX,F6HMOV AL,1001000BOUT DX,ALMOV DX,FBHMOV AL,01110110BOUT DX,ALMOV AL,00110110B;选择8253计数器1MOV DX,F8HMOV AL,0OUT DX,ALMOV AL,10OUT DX,AL;选择8253计数器0MOV DX,FGHMOV AL,0OUT DX,ALMOV AL,10MOV CX,2000H;用CX延时,读取开关状态 NEXT:OUT DX,ALMOV DX,F2HIN DX,AL;输出开关状态,此时亮起灯,如果灯全亮起,蜂鸣器响起MOV DX,F4HOUT DX,ALLOOP NEXT;锁存两个计数器的计数值MOV AL,00110110BMOV DX,F8HOUT DX,ALMOV AL,01110110BMOV DX,F9HOUT DX,ALCSEG ENDSEND START六、实验总结及体会1.实验总结:本次实验中我设计了8086连接8253和8255的相关电路,并且与输出设备相连接,也重新复习了数电的知识,通过学习微机原理和汇编语言这门接近底层的语言我意识到代码与底层的交互是怎样实现的,也有利于我学习其他的高级语言。
8255的编程方法

8255的编程方法
8255是一种可编程的并行I/O接口芯片,通常用于微机系统中的输入输出
接口扩展。
以下是8255的编程方法:
1. 初始化8255
在编程8255之前,需要先对其初始化,即设置其控制字。
控制字是通过对其三个控制端口的写操作来设置的。
通常将这三个控制端口写为0,然后分别写入三个控制字:
控制字1:设置8255的工作方式,包括输入输出方式、数据传输方向等。
控制字2:设置8255的输入输出地址,包括输入输出端口的地址。
控制字3:设置8255的中断控制方式。
2. 读/写8255端口数据
一旦初始化8255之后,就可以对其进行读/写操作了。
读/写操作是通过对
其三个数据端口进行读/写操作来实现的。
通常将这三个数据端口读/写为0,然后分别读/写三个数据端口的数据:
数据端口A:读/写8255的输入输出端口A的数据。
数据端口B:读/写8255的输入输出端口B的数据。
数据端口C:读/写8255的控制端口的输入输出数据。
3. 中断处理
如果设置了8255的中断控制方式,那么当8255发生中断时,微机系统会
向其发出中断请求信号,此时需要进行中断处理。
中断处理通常包括以下步骤:
识别中断源:根据中断请求信号判断是哪个端口发生了中断。
关闭中断:通过向相应的控制端口写入一个特定的值来关闭中断。
处理中断:根据中断源执行相应的处理程序,包括读取数据、修改数据等。
结束中断:完成处理程序后,再次向相应的控制端口写入一个特定的值来
结束中断。
微机接口技术》内容复习资料

可屏蔽中断(硬件中断)
8088CPU的中断源
常见问题:
使用80X86的CPU有两种类型的中断: 内部中断 外部中断 _________和_________。而后者中由8259A管 理的中断又被称为____________。 硬件中断
中断控制器8259A
8259中断控制器用于管理PC机的硬件中断,在接 口技术中的中断编程也就是对8259中断控制器的编 程设置。 8259A的内部结构主要由8个功能模块组成。其中 比较重要的是IRR、ISR及IMR这三个寄存器。
初始化命令字ICW
初始化命令字共有四条(ICW1~ICW4),其中 ICW1、ICW2是必须的,而ICW3和ICW4是由工作 方式决定取舍的。 各命令字意义如下: ICW1:复位命令字 ICW2:中断向量字;其高5位用于规定8259A的 IR0线上的中断类型号; ICW3:级联控制字;主片的ICW3的某位为1对 应于相应的IR线上级联有从片8259;从片的 ICW3的低3位对应于其INT请求线联入主片的IR 线的编码。 ICW4:中断方式字
中断屏蔽寄存器(IMR):IMR对IRR中相应的中断请求起屏蔽作用,用户 中断服务寄存器(ISR):在中断响应之后的第一个INTR周期将ISR中与IRR 中断请求寄存器(IRR):用于保存外设在IR0~IR7线上提出的中断请求, 可根据需要允许某些中断发生(相应位置0)或禁止某些中断(相应位置1)。 由连接在IR0~IR7线上的外设产生的触发信号来置位。 对应的中断源置位,表明该中断源正处在被服务中。
§3 并行接口8255
8255共有4个端口,其中三个数据口PA、PB和 PC口,一个命令状态口。 PA和PB口为两个8位并行输入/输出端口,PC 口可以看作是两个4位端口(PC口高/低4位) 或一个8位端口;PC端口具有按位复位/置位 功能;
模拟交通灯实验报告
单片机综合实验报告题目: 模拟真实交通灯班级:姓名:学号:指导老师:时间:一、实验内容:用8255芯片的PA、PB口低四位做输出口,控制十二个发光二极管燃灭,模拟十字路口交通灯管理,并利用数码显示器进行倒计时显示(采用单片机内部定时器定时)。
通过外部中断能使交通灯暂停运行,并点亮4个红灯。
通过16*16点阵中的图形模拟控制行人过马路的人形“走”、“停”指示灯,可参考下图所示。
选做增加项目:在交通灯开始之前可通过开关对红绿灯亮灭时间的初始值进行增、减设定或者交通灯暂停时加上乐曲报警。
二、实验电路及功能说明电路:74LS138译码器电路8255与发光二极管连线图数码LED显示器电路(不需接线)16×16LED点阵显示电要求:交通灯亮灭过程同“8255控制交通灯实验”,倒计时显示只需两位数(0~99),用定时器定时进行倒计时,每秒钟减1。
在16*16点阵中显示的人形“走”、“停”标志可自定义,由专门软件可转换为相应显示代码,不需自己推理。
三、实验程序流程图:主程序:子程序:详细程序请参考程序清单。
四、实验结果分析对程序进行仿真可以观察到:点阵中交替显示如图(a)、(b)所示图像,且交替显示时间为30秒。
当显示图像为(a)时,表示可以容行人通过,限时30秒;当显示图像为(b)时,表示不容行人通过,也限时30秒。
如此,在十字路口各置一对点阵即可模拟实景。
五、心得体会通过此次实验,对单片机的I/O口的使用的条件有了更深的理解,对单片机的各个管脚功能的理解也加深了,以及在常用编程设计思路技巧的掌握方面也向前迈了一大步。
这次的课程设计让我把单片机的理论知识应用在实践中,实现了理论和实践相结合,从中更懂得理论是实践的基础,实践有助于检验理论的正确性的道理,对我以后参加工作或者继续学习深造将产生巨大的帮助和影响。
六、程序清单#include <reg51.h>#include <absacc.h>#define uchar unsigned char#define uint unsigned int#define ROW1 XBYTE[0XFFE3]#define ROW2 XBYTE[0XFFE0]#define COL1 XBYTE[0XFFE2]#define COL2 XBYTE[0XFFE1]#define PA XBYTE[0xffd8]#define PB XBYTE[0xffd9]#define CTL XBYTE[0xffdb]#define SEG XBYTE[0xffdc]#define BIT XBYTE[0xffdd]#define allredend 10#define ewredend 2*ewstarter+allredend#define snyellowend ewredend+10#define snredend snyellowend+2*snstarter#define ewyellowend snredend+10sbit KEY1=P1^0;sbit KEY2=P1^1;sbit KEY3=P1^2;sbit P32=P3^2;uchar tongBu;uchar code ewTable[]={0xb6,0x75,0xf3,0xf7,0xae,0x9e,0xbe};uchar code nsTable[]={0xd,0xd,0xc,0xd,0xb,0x7,0xf};//uchar tempa,tempb;int time=1,cnt,change,intflag,inttime=1,ewstarter=10,snstarter=15;int tempseg;uchar key1=0;uchar buffer[]={0,0,0,0,0,0};uchar table[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xff};/*-- 行走--*//*-- 宽度x高度=16x16 --*/uchar code led1[]={0x01,0x80,0x02,0x40,0x02,0x40,0x01,0x80,0x03,0xC0,0x06,0x60,0x0A,0x50,0x0A,0x5 0,0x0B,0xD0,0x12,0x48,0x02,0x40,0x02,0x60,0x04,0x20,0x04,0x20,0x08,0x20,0x18,0x60};/*-- 停止--*//*-- 宽度x高度=16x16 --*/uchar code led2[]={0x01,0x80,0x02,0x40,0x02,0x40,0x01,0x80,0x07,0xE0,0x7E,0x7E,0x02,0x40,0x02,0x40 ,0x03,0xC0,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x03,0xC0};/*-- 文字: 高--*//*-- Fixedsys12; 此字体下对应的点阵为:宽x高=16x16 --uchar code led2[]={0x02,0x00,0x01,0x00,0xFF,0xFE,0x00,0x00,0x0F,0xE0,0x08,0x20,0x0F,0xE0,0x00,0x0 0,0x7F,0xFC,0x40,0x04,0x4F,0xE4,0x48,0x24,0x48,0x24,0x4F,0xE4,0x40,0x14,0x40,0x08};*/ void delayshort(){char n;for(n=50;n>0;n--);}uchar changeleft(uchar led){uchar temp;temp=0;temp|=(led<<7)&0x80;temp|=(led<<5)&0x40;temp|=(led<<3)&0x20;temp|=(led<<1)&0x10;temp|=(led>>1)&0x08;temp|=(led>>3)&0x04;temp|=(led>>5)&0x02;temp|=(led>>7)&0x01;return(temp);}void led16_16display(uchar *table,uchar length){uchar i=length/2,scan1=0x1,scan2=0x1;for(i=0;i<16;i++){if(i<8){ROW1=0;ROW2=0;COL1=scan1;COL2=0;ROW1=changeleft(table[2*i]);ROW2=table[2*i+1];COL1=scan1;COL2=0;delayshort();scan1<<=1;}else{ROW1=0;ROW2=0;COL1=0;COL2=scan2;ROW1=changeleft(table[2*i]);ROW2=table[2*i+1];COL1=0;COL2=scan2;delayshort();scan2<<=1;}}}void changeseg(){if(key1==0){buffer[3]=10;buffer[0]=10;buffer[5]=tempseg%10;buffer[4]=tempseg/10;buffer[2]=tempseg%10;buffer[1]=tempseg/10;}else if(key1==1){buffer[3]=10;buffer[0]=10;buffer[5]=ewstarter%10;buffer[4]=ewstarter/10;buffer[2]=ewstarter%10;buffer[1]=ewstarter/10;}else{buffer[3]=10;buffer[0]=10;buffer[5]=snstarter%10;buffer[4]=snstarter/10;buffer[2]=snstarter%10;buffer[1]=snstarter/10;}}void timer1()interrupt 3{static uchar temp=0x20,cnt1;TH1=(65536-1000)/256;TL1=(65536-1000)%256;changeseg();SEG=0xff;SEG=table[buffer[cnt1]];cnt1++;if(cnt1==6)cnt1=0;BIT=temp;temp>>=1;if(temp==0)temp=0x20;}void int_0()interrupt 0{delayshort();if(P32==0){PA=0xB6;PB=0xd;PT0=1;PT1=1;intflag=1;while(inttime<=20)led16_16display(led2,32);inttime=1;intflag=0;PT0=0;PT1=0;PA=ewTable[tongBu];PB=nsTable[tongBu];}}void timer0()interrupt 1{TH0=(65536-50000)/256;TL0=(65536-50000)%256;cnt++;if(cnt==5){cnt=0;if(intflag==1){inttime++;tempseg=10-inttime/2;}else{time++;if(time<=allredend){tongBu=0;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=allredend/2-(time+1)/2;}else if((time>allredend)&&(time<=ewredend)){tongBu=1;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=ewstarter+allredend/2-(time+1)/2;}else if((time>ewredend)&&(time<=snyellowend)){if(change==0){tongBu=2;PA=ewTable[tongBu];PB=nsTable[tongBu];change=1;}else{tongBu=3;PA=ewTable[tongBu];PB=nsTable[tongBu];change=0;}tempseg=ewstarter+allredend/2+5-(time+1)/2;}else if((time>snyellowend)&&(time<=snredend)){tongBu=4;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=ewstarter+allredend/2+5+snstarter-(time+1)/2;}else if((time>snredend)&&(time<=ewyellowend)){if(change==0){tongBu=5;PA=ewTable[tongBu];PB=nsTable[tongBu];change=1;}else{tongBu=6;PA=ewTable[tongBu];PB=nsTable[tongBu];change=0;}tempseg=ewstarter+10+allredend/2+snstarter-(time+1)/2;}else{tongBu=1;time=allredend+1;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=ewstarter+allredend/2-(time+1)/2;}}}}void key(){uchar keynum;keynum=~(P1|0XF8);switch(keynum){case 0x1:while(KEY1==0)led16_16display(led2,32);key1++;TR0=0;if(key1==3){key1=0;TR0=1;}break;case 0x2:while(KEY2==0)led16_16display(led2,32);if(key1==1){ewstarter++;if(ewstarter==100)ewstarter=0;}if(key1==2){snstarter++;if(snstarter==100)snstarter=0;}break;case 0x4:while(KEY3==0)led16_16display(led2,32);if(key1==1){ewstarter--;if(ewstarter==-1)ewstarter=99;}if(key1==2){snstarter--;if(snstarter==-1)snstarter=99;}break;default:break;}}void main(){IE=0x8b;IT0=1;TMOD=0x11;TH0=(65536-50000)/256;TL0=(65536-50000)%256;TH1=(65536-1000)/256;TL1=(65536-1000)%256;CTL=0x80;tongBu=0;TR1=1;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=allredend/2-(time+1)/2;TR0=1;while(1){key();if(intflag==0){if(key1==0){if(time<=allredend)led16_16display(led2,32);else if(time>allredend&&time<=snyellowend)led16_16display(led1,32);else if(time>snyellowend&&time<=ewyellowend)led16_16display(led2,32);}elseled16_16display(led2,32);}}}。
《微机原理与接口技术》课程总结
《微机原理与接口技术》课程总结本学期我们学习了《微型计算机原理与接口技术》,总的来说,我掌握的知识点可以说是少之又少,我感觉这门课的内容对我来说是比较难理解的。
这门课围绕微型计算机原理和应用主题,以Intel8086CPU为主线,系统介绍了微型计算机的基本知识、基本组成、体系结构、工作模式,介绍了8086CPU的指令系统、汇编语言及程序设计方法和技巧,存储器的组成和I/O接口扩展方法,微机的中断结构、工作过程,并系统介绍了微机中的常用接口原理和应用技术,包括七大接口芯片:并行接口8255A、串行接口8251A、计数器/定时器8253、中断控制器8259A、A/D(ADC0809)、D/A (DAC0832)、DMA(8237)、人机接口(键盘与显示器接口)的结构原理与应用。
在此基础上,对现代微机系统中涉及的总线技术、高速缓存技术、数据传输方法、高性能计算机的体系结构和主要技术作了简要介绍。
第一章:微型计算机概论(1)超、大、中、小型计算机阶段(1946年-1980年)采用计算机来代替人的脑力劳动,提高了工作效率,能够解决较复杂的数学计算和数据处理(2)微型计算机阶段(1981年-1990年)微型计算机大量普及,几乎应用于所有领域,对世界科技和经济的发展起到了重要的推动作用。
(3)计算机网络阶段(1991年至今)。
计算机的数值表示方法:二进制,八进制,十进制,十六进制。
要会各个进制之间的数制转换。
计算机网络为人类实现资源共享提供了有力的帮助,从而促进了信息化社会的到来,实现了遍及全球的信息资源共享。
第二章:80X86微处理器结构本章讲述了80X86微处理器的内部结构及他们的引脚信号和工作方式,重点讲述了8086微处理器的相关知识,从而为8086微处理器同存储器以及I/O设备的接口设计做了准备。
本章内容是本课程的重点部分。
第三章:80X86指令系统和汇编语言本章讲述了80X86微处理器指令的多种寻址方式,讲述了80X86指令系统中各指令的书写方式、指令含义及编程应用;讲述了汇编语言伪指令的书写格式和含义、汇编语言中语句的书写格式。
微机原理实验心得体会

微机原理实验心得体会篇一:微机原理实验总结微机原理实验总结不知不觉,微机原理与接口技术实验课程已经结束了。
回忆起来收获颇丰,主如果加深了对计算机的一些硬件情况和运行原理的理解和汇编语言的编写汇编语言,对于学习机电工程的自动控制和计算机都是很重要的,因为它是和机械语言最接近的了,若是用它来编程序的话,会比用其它高级语言要快得多。
本学期咱们在老师的率领下,进行了微机原理实验六到十这五组实验。
它们别离是:实验六8255 PA口控制PB口实验目的掌握单片机系统中扩展外围芯片的方式,了解8255 芯片的结构及编程方式。
实验内容用8255 PA 口作开关量输入口,PB 口作输出口。
实验步骤一、用8 芯线将8 255 PA口接至开关Kl~K8,PB口接至发光二极管L1~L8;二、运行程序,拨动开关K1~K8,观察L1~L8发光二极管是不是对应点亮。
实验七8255控制交通灯实验目的进一步了解8 255 芯片的结构及编程方式,学习模拟交通控制的实现方式。
实验内容用8255 做输出口,控制六个发光二极管燃灭,模拟交通灯管理。
实验步骤一、用双头线将8 255 PA0~PA2 口接至发光二极管L3~L1,PA3~PA5口接至发光二极管L7~L5;二、执行程序,初始态为四个路口的红灯全亮,以后,东西路口的绿灯亮,南北路口的红灯亮,东西路口方向通车,延时一段时间后东西路口的绿灯熄灭,黄灯开始闪烁,闪烁若干次后,东西路口红灯亮,而同时南北路口的绿灯亮,南北路口方向开始通车,延时一段时间后,南北路口的绿灯熄灭,黄灯开始闪烁,闪烁若干次后,再切换到东西路口方向,以后重复以上进程。
实验八简单I /O口扩展实验目的学习单片机系统中扩展简单I/O 口的方式;学习数据输入输出程序的编制方式。
实验内容利用74LS244 作为输入口,读取开关状态,并将此状态,通过74LS273再驱动发光二极管显示出来。
五、实验步骤一、用8 芯线将Y0~Y7接至开关K1~K8,Q0~Q7 接至发光二极管L1~L8,用双头线将CS1 接至8 000 孔,CS2 接至9 000 孔,用8 芯线将J X0 接至JX7(D0~D7数据线);二、执行程序,按动开关K1~K8,观察发光二极管L1~L8是不是对应点亮。
2023年微机原理实验指导书

2.1系统生疏试验【试验目的】把握TD 系列微机原理及接口技术教学试验系统的操作,生疏Wmd86 联机集成开发调试软件的调试环境。
【试验设备】PC 机一台,TD-PITE 试验装置一套。
【试验内容】编写试验程序,将00H~0FH 共16 个数写入到内存3000H 开头的连续16 个存储单元中。
【试验步骤】1.运行Wmd86 软件,进入Wmd86 集成开发环境。
2.在设置菜单中选择“汇编语言”和“16 位存放器”。
3.单击文集菜单的建命令,建一个文档,默认文件名为Wmd861。
4.编写试验程序,并保存,此时系统会提示输入的文件名,输完后点击保存。
5.单击编译文件,假设程序编译无误,则科技连续单击进展链接,链接无误前方可以加载程序。
6.连接PC 与试验系统的通讯电缆,翻开试验系统电源。
7.编译、链接都正确并且上下机通讯成功后,就可以下载程序,联机调试了。
可以通过端口列表中的“端口测试”来检查通讯是否正常。
点击下载程序。
为编译、链接、下载组合按钮,通过该按钮可以将编译、链接、下载一次完成。
下载成功后,在输出区的结果窗中会显示“加载成功!”,表示程序已正确下载。
起始运行语句下会有一条绿色的背景。
8.将输出区切换到调试窗口,试验命令D0000:3000 查看内存3000H 起始地址的数据。
9.点击按钮运行程序,等待程序运行停顿后,通过命令来观看程序结果。
10.也可以设置端点,要修改内存中的数据可以使用命令E,如E0000:3000 可以修改地址0000:3000 处的数据,修改完一个后,可按“空格”键连续输入下一个数。
输入完成后按“回车”键退出。
2.2数制转换试验【试验目的】1 把握不同进制数及编码相互转换的程序设计方法,加深对数值转换的理解。
2.生疏程序调试的方法。
【试验设备】PC 机一台,TD-PITE 试验装置一套。
【试验内容】编写程序,将ASCII 码表示的十进制数转换为二进制数。
【试验步骤】1.依据程序流程图编写程序。
8255 方式1输出实验 实验报告_孔令宇 10284032

8255 方式1输出实验学生:孔令宇班级:计科10级1006班任课教师:吴为民一、实验目的掌握查询方式实现8255选通型输入(方式1)的编程控制方法。
二、实验内容将8255端口A的PA7-PA0与8个发光二极管L7-L0连接,PB2-PB0与拨动开关的K2-K0连接,8255的CS与地质译码区的0-F端子连接,PC2(/ACK)与单脉冲端连接。
先预知开关K2-K0为一组输入状态,然后按下单脉冲按键产生一个负脉冲,输入到PC2。
用发光二极管LEDi亮和LED 7段数码管最右端一位上显示K2-K0的状态三、实验原理图四、实验流程7段LED显示模块210h 200h五、实验代码.model small.386data segmentio8255_a equ 200h ;8255基址值io8255_b equ 201hio8255_c equ 202hio8255kz equ 203htab db 01h,02h,04h,08h,10h,20h,40h,80hled_code db 3fh,06h,5bh,4fh,66h,6dh,7dh,07h,7fh,67h,77h,7ch,39h,5eh,79h,71h ;七段数码管段码led_cs equ 210h ;led七段数码管片选data endscode segmentassume cs:code,ds:datastart:mov ax,datamov ds,axmov dx,io8255kzmov al,0aeh ;设置工作方式为方式1,A口输出、B口输入out dx, almov al,04h ;设置(pc2)/ACKA=0out dx, all1: mov dx, io8255_css1: in al, dxtest al,00000010b ;判断/IBFB(PC1)=1?jz ss1mov dx,io8255_bin al,dx ;读入dx的内容and al, 07hpush ax ;保存ax中的内容,ax进栈mov bx,offset tab ;获取tab的地址xlat tab ;查表mov dx,io8255_aout dx,alpop ax ;ax出栈,还原ax内容call displayjmp l1display proc nearmov si,offset led_code ;获取数码管段码初地址mov ah,0add si,ax ;键码加上段码初地址得到对应的段码地址mov al,[si] ;获取段码mov dx,led_csout dx,al ;将段码输出至数码管片选mov al,01h ;选择显示位码inc dxout dx,alretdisplay endpcode endsend start六、实验现象在全速运行代码后,波动开关K2-K0初始状态均为低电平,在产生一个负脉冲后,二极管PA0亮,7断数码管最右端一位显示数字“0”。
南邮微机实验报告
一、实验名称微机原理与接口技术实验二、实验目的1. 理解微机的基本工作原理和硬件组成。
2. 掌握计算机常用接口芯片的基本功能和使用方法。
3. 熟悉微机实验系统的操作流程。
4. 培养动手实践能力和分析问题、解决问题的能力。
三、实验内容1. 微机硬件系统认知- 了解微机的硬件组成,包括CPU、内存、主板、硬盘、显卡、声卡等。
- 通过实验观察微机硬件各部分的功能和连接方式。
2. 微机接口芯片实验- 学习并行接口芯片8255的使用方法和编程技巧。
- 实现键盘输入和LED显示,设计一个简单的定时显示装置。
3. 微机实验系统操作- 熟悉微机实验系统的使用方法和操作流程。
- 掌握实验软件的安装和使用。
4. 汇编语言程序设计- 学习汇编语言的基本语法和编程技巧。
- 编写简单的汇编语言程序,实现特定功能。
四、实验步骤1. 微机硬件系统认知- 观察微机硬件各部分的功能和连接方式。
- 使用实验设备观察CPU、内存、主板、硬盘等硬件的工作状态。
2. 微机接口芯片实验- 根据实验指导书,配置并行接口芯片8255。
- 编写程序实现键盘输入和LED显示功能。
- 设计定时显示装置,实现时间显示和按键控制。
3. 微机实验系统操作- 安装实验软件,熟悉实验系统的操作流程。
- 使用实验软件进行实验操作。
4. 汇编语言程序设计- 学习汇编语言的基本语法和编程技巧。
- 编写汇编语言程序,实现特定功能。
五、实验结果与分析1. 微机硬件系统认知- 通过实验观察,了解了微机硬件各部分的功能和连接方式。
- 掌握了微机实验系统的使用方法和操作流程。
2. 微机接口芯片实验- 成功实现了键盘输入和LED显示功能。
- 设计的定时显示装置能够正常工作。
3. 微机实验系统操作- 熟练掌握了微机实验系统的操作流程。
4. 汇编语言程序设计- 成功编写了汇编语言程序,实现了特定功能。
六、实验心得体会通过本次实验,我对微机原理和接口技术有了更深入的了解。
实验过程中,我学会了如何使用微机实验系统,掌握了微机接口芯片的编程技巧,提高了动手实践能力。
8255 控制led灯亮灭编程题

8255 控制led灯亮灭编程题8255是一种通用并行输入/输出(GPIO)芯片,可以通过编程来控制外部设备,如LED灯。
编程使用的语言和平台可能有所不同,这里提供一个简单的汇编语言的例子,演示如何通过8255控制LED灯的亮灭。
假设LED灯连接到8255芯片的输出端口,具体的引脚配置和接线方式需要根据硬件连接进行调整。
section .database_port equ 0x378 ; 设置8255的基地址端口,具体地址根据实际情况调整section .textglobal _start_start:; 初始化8255的控制寄存器,设置为输出模式mov dx, base_port + 2 ; 控制寄存器地址 = 基地址 + 2mov al, 0b00110000 ; 设置8255为输出模式out dx, al; 使LED灯亮mov dx, base_port ; 数据端口地址 = 基地址mov al, 0xFF ; 设置输出数据,具体值根据LED 连接方式确定out dx, al; 停留一段时间,让LED保持亮的状态call delay; 使LED灯灭mov dx, base_port ; 数据端口地址 = 基地址mov al, 0x00 ; 设置输出数据,具体值根据LED 连接方式确定out dx, al; 程序结束mov eax, 1 ; 系统调用号为退出程序xor ebx, ebx ; 返回值为0int 0x80 ; 调用系统中断delay:; 延时函数,简单粗暴的方式mov cx, 0xFFFFdelay_loop:dec cxjnz delay_loopret这是一个简单的汇编语言程序,演示了如何通过8255控制LED 灯的亮灭。
请注意,这只是一个示例,实际应用中需要根据具体的硬件连接和需求进行调整。
在实际项目中,可能会使用更高级的编程语言(如C、C++)和开发环境进行开发。
8255a初始化编程

8255a初始化编程
8255A是一种并行I/O接口芯片,它可以配置为三个独立的I/O端口:端口A、端口B和端口C。
以下是一个8255A 的初始化编程的简单示例:
首先,我们需要设置控制字来配置8255A的工作模式。
控制字是通过将8位数据写入控制寄存器来设置的。
控制字的每一位都有特定的含义,用于配置端口A、端口B和端口C的工作模式。
例如,如果我们想要设置端口A为输出模式,端口B为输入模式,端口C为输入模式,我们可以设置控制字为1000 0000。
这个控制字的意思是:
控制字的第0位设置为1表示使能片选信号(ENABLE),启动芯片。
控制字的第1位设置为0表示端口A为输出模式。
控制字的第2位设置为0表示端口B为输入模式。
控制字的第3位设置为0表示端口C为输入模式。
控制字的第4位到第7位未使用,因此可以忽略。
然后,我们可以将这个控制字写入8255A的控制寄存器:assembly复制代码:
OUT 8255_control_register, control_word
其中,8255_control_register是控制寄存器的地址,control_word是我们刚才计算出的控制字。
这样我们就完成了8255A的初始化编程。
之后,我们就可以使用端口A、端口B和端口C进行I/O操作了。
注意:以上代码是假设我们在使用某种汇编语言进行编程。
不同的编程语言可能有不同的语法和函数来操作硬件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8255A引脚功能及管脚定义图
8255共有40个引脚,采用双列直插式封装,各引脚功能如下:
D0--D7:三态双向数据线,与单片机数据总线连接,用来传送数据信息。
CS:片选信号线,低电平有效,表示芯片被选中。
RD:读出信号线,低电平有效,控制数据的读出。
WR:写入信号线,低电平有效,控制数据的写入。
Vcc:+5V电源。
PA0--PA7:A口输入/输出线。
PB0--PB7:B口输入/输出线。
PC0--PC7:C口输入/输出线。
RESET:复位信号线。
TLP521光耦合器亦称光电隔离器,简称光耦。
光耦合器以光为媒介传输电信号。
它对输入、输出电信号有良好的隔离作用,所以,它在各种电路中得到广泛的应用。
目前它已成为种类最多、用途最广的光电器件之一。
光耦合器一般由三部分组成:光的发射、光的接收及信号放大。
输入的电信号驱动发光二极管(LED),使之发出一定波长的光,被光探测器接收而产生光电流,再经过进一步放大后输出。
这就完成了电-光-电的转换,从而起到输入、输出、隔离
的作用。
由于光耦合器输入输出间互相隔离,电信号传输具有单向性等特点,因而具有良好的电绝缘能力和抗干扰能力。
又由于光耦合器的输入端属于电流型工作的低阻元件,因而具有很强的共模抑制能力。
所以,它在长线传输信息中作为终端隔离元件可以大大提高信噪比。
在计算机数字通信及实时控制中作为信号隔离的接口器件,可以大大增加计算机工作的可靠性。
1.光耦合器(TLP521)的主要优点
信号单向传输,输入端与输出端完全实现了电气隔离隔离,输出信号对输入端无影响,抗干扰能力强,工作稳定,无触点,使用寿命长,传输效率高。
光耦合器现已广泛用于电气绝缘、电平转换、级间耦合、驱动电路、开关电路、斩波器、多谐振荡器、信号隔离、级间隔离、脉冲放大电路、数字仪表、远距离信号传输、脉冲放大、固态继电器(SSR)、仪器仪表、通信设备及微机接口中。
在单片开关电源中,利用线性光耦合器可构成光耦反馈电路,通过调节控制端电流来改变占空比,达到精密稳压目的。
2.光耦合器(TLP521)的性能及类型
用于传递模拟信号的光耦合器的发光器件为二极管、光接收器为光敏三极管。
当有电流通过发光二极管时,便形成一个光源,该光源照射到光敏三极管表面上,使光敏三极管产生集电极电流,该电流的大小与光照的强弱,亦即流过二极管的正向电流的大小成正比。
由于光耦合器的输入端和输出端之间通过光信号来传输,因而两部分之间在电气上完全隔离,没有电信号的反馈和干扰,故性能稳定,抗干扰能力强。
发光管和光敏管之间的耦合电容小(2pf左右)、耐压高(2.5KV左右),故共模抑制比很高。
输入和输出间的电隔离度取决于两部分供电电源间的绝缘电阻。
此外,因其输入电阻小(约
10Ω),对高内阻源的噪声相当于被短接。
因此,由光耦合器构成的模拟信号隔离电路具有优良的电气性能。
事实上,光耦合器是一种由光电流控制的电流转移器件,其输出特性与普通双极型晶体管的输出特性相似,因而可以将其作为普通放大器直接构成模拟放大电路,并且输入与输出间可实现电隔离。
然而,这类放大电路的工作稳定性较差,无实用价值。
究其原因主要有两点:一是光耦合器的线性工作范围较窄,且随温度变化而变化;二是光耦合器共发射极电流传输系数β和集电极反向饱和电流ICBO(即暗电流)受温度变化的影响明显。
因此,在实际应用中,除应选用线性范围宽、线性度高的光耦合器
来实现模拟信号隔离外,还必须在电路上采取有效措施,尽量消除温度变化对放大电路工作状态的影响。
从光耦合器的转移特性与温度的关系可以看出,若使光耦合器构成的模拟隔离电路稳定实用,则应尽量消除暗电流(ICBO)的影响,以提高线性度,做到静态工作点IFQ随温度的变化而自动调整,以使输出信号保持对称性,使输入信号的动态范围随温度变化而自动变化,以抵消β值随温度变化的影响,保证电路工作状态的稳定性。
ULN2803达林顿管IC,一般都是用来驱动功率稍微大一点的被动器件的,而驱动的被动器件里,有很大一部分是感性的,如继电器、马达、电磁阀等,这些感性器件在关断瞬间会产生很高的自感电动势(自感电压),低的10多伏,高的几十伏,甚至几百伏,这么高的电压很容易把ULN2803 达林顿管打坏,甚至打坏电路中的其它元器件,所以需要在感性器件上并联一个二极管,用来续流(就是把那个自感高压放掉),保护IC和其它器件不受破坏,此续流二极管正极接2803输出端(即电感器件的一端),负极接驱动电源(在2803上是10脚,也就是电感器件的另一端)。
2803在内部设计了二极管以后,用户
在使用的时候不需要外接二极管,在同时驱动多路器件的时候可以节省PCB空间,节约成本、方便走线。
ULN2802 ULN2803 ULN2804A 8 个 NPN 达林顿晶体管,连接在阵列非常适合逻辑接口电平数字电路(例如 TTL,CMOS 或 PMOS 上/ NMOS)和较高的电流/电压,如电灯,电磁阀,继电器,打印锤或其他类似的负载,广泛的使用范围:计算机,工业和消费应用。
所有设备功能由集电极输出和钳位二极管瞬态抑制。
该 ULN2803 是专为符合标准 TTL,而制造 ULN2804 适合 6 至15V 的高级别 CMOS 或 PMOS 上。
该电路为反向输出型,即输入低电平电压,输出端才能导通工作。
一引脚图
1-8引脚:输入端
11-18引脚:输出端
9引脚:地端
10(COM)引脚:电源+
COM脚的作用是当你使用 ULN2803(2003)来驱动继电器时,可以将COM 脚接到继电器
的VCC端,利用ULN2803(2003)内部的反向二极管作保护继电器,消除继电器闭合时产生的感应电压。
COM端主要有两种用途:(可悬空)
1 试验用----接地:假如它的输出端都接发光二极管,那么,只要将 COM端接地,则所有
的发光二极管都将亮起,否则,可能是二极管坏或其它什么地方坏了。
这对检修是很有利的。
2 保护用----接电源正:假如这个器件是接继电器或针式打印头,因为电感的作用,会在开
关过程中产生低于地电位和高于电源电位的反电动势,这样,很容易击穿器件。
为了防止这种现象的发生,可将 COM端接到电源正,来削减冲击电压低到二极管压降加电源电压的幅度----可以使得内部的三极管受到最小的正电压冲击。
至于达林顿关断时产生的负电压我们不必管,因为器件内部就有二极管并接到地的.专门用来削减冲击电压至电源地减去一个二极管正向压降----可以使得内部的三极管受到最小的反偏电压冲击。
参考资料
周荷琴,吴秀清,微型计算机原理与接口技术,第四版,中国科学技术大学出版社
龚尚福微机原理与接口技术,西安电子科技大学出版社。