I4200400_B6手柄图纸
螺旋千斤顶设计说明书
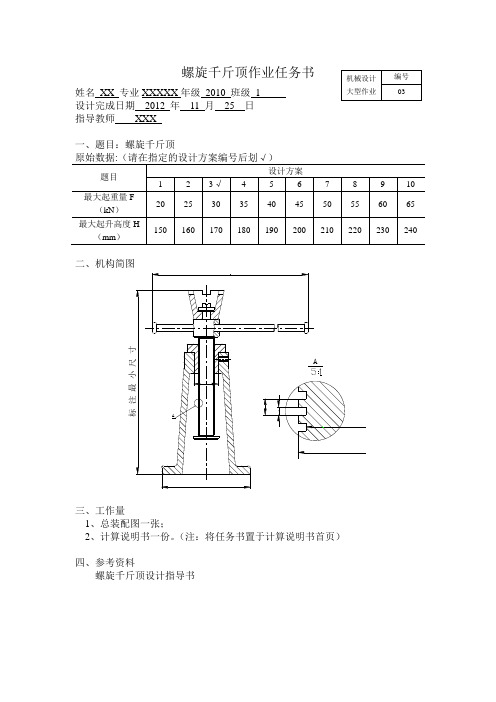
螺旋千斤顶作业任务书 姓名 XX 专业XXXXX 年级 2010 班级 1设计完成日期 2012 年 11 月 25 日 指导教师 XXX一、题目:螺旋千斤顶原始数据:(请在指定的设计方案编号后划√)题目 设计方案1 2 3√ 4 5 6 7 8 9 10 最大起重量F (kN ) 20 25 30 35 40 45 50 55 60 65 最大起升高度H(mm )150160170180190200210220230240二、机构简图标 注 最 小 尺 寸AA三、工作量1、总装配图一张;2、计算说明书一份。
(注:将任务书置于计算说明书首页)四、参考资料螺旋千斤顶设计指导书机械设计 大型作业编号03目录一、设计题目 (4)二、螺杆的设计与计算2.1 螺纹的牙型 (3)2.2螺杆的材料 (3)2.3螺纹直径 (3)2.4自锁验算 (4)2.5其他结构设计 (5)2.6螺杆的强度校核 (5)三、螺母的设计与计算3.1材料 (6)3.2螺纹圈数Z与高度H (6)3.3螺母其他尺寸 (6)3.4螺母与底座的配合 (7)四、螺杆稳定性验算 (7)五、托杯的设计与计算 (8)六、手柄设计与计算 (8)6.1材料 (9)6.2手柄长度 (9)6.3手柄直径 (9)6.4其他结构 (10)七、底座设计11八、千斤顶的效率12计 算 及 说 明 结 果 一、设计题目螺旋千斤顶主要零件:螺杆、螺母、托杯、手柄和底座。
扳动手柄可使螺杆在固定螺母中旋转,从而将托杯上的重物举起或放落。
设计的原始数据:最大起重F=30KN 、最大升起高度H=170mm 。
二、螺杆的设计与计算:2.1 螺纹的牙型选用矩形螺纹,采用内径对中,配合选H8/h8,由于螺纹的径向间隙很小,在强度计算时不予考虑。
2.2螺杆的材料查资料]1[可知,螺杆可选用45钢,弹性模量MPa E 196=2.3螺纹直径螺杆工作时,同时受压力与扭矩的作用,因此它的计算可近似按紧螺栓联接的计算公式估算出螺纹内径,即:F=30KN H=170mmH8/h8螺杆45钢 弹性模量MPa E 196=[]σπFd 3.1x 41≥(1)参考资料]2[得知,螺杆的屈服极限MPa s 345=σ,取安全因数3=S ,得许用应力[]MPa Ss115==σσ (2) 将数据带入式(1)得螺纹内径估算值为mm d 78.201011510303.14631=⨯⨯⨯⨯⨯≥π (3) 根据经验公式4P 1d =,得mm P 20.5=。
TopSolid培训手册

目录
练习 01 轴类草图....................................................................................................................... 1 新建一个项目................................................................................................................................ 1 新建一个零件................................................................................................................................ 1 通过点创建一个草图..................................................................................................................... 2 修改草图 ................................................................................................ 3
练习 02 第二个草图 ................................................................................................................... 5 新建一个零件文档 ........................................................................................................................ 5 创建一个草图................................................................................................................................ 5
RME FireFace UC中文说明书

Fireface UCX
最强大的便携式 FireWire® 及 USB 音频接口!
TotalMix™
SyncAlign™
SteadyClock ™
SyncCheck™
USB 2.0/FireWire 400 数字输入/输出系统 8+8+2 通道模拟/ADAT/SPDIF 接口 24Bit/192kHz 数字音频 36x18 矩阵路由器 2xMIDI I/O 独立运行 类兼容运行 MIDI 远程控制
安全须知 .......................................................................................................6
概要
1 简介 ...............................................................................................................8
16 设置 Fireface
16.1 设置对话框................................................................................................30 16.2 时钟模式 - 同步 ....................................................................................32
4 简介及主要特点........................................................................................8
螺旋给料机说明书
螺旋给料机说明书第一篇:螺旋给料机说明书PAMF-30螺旋给料机PAMF-30Screw Feeder使用说明书Instruction一、结构及工作原理:PAMF型螺旋给料机的结构见总图,由交流调速电动机、蜗轮减速机、给料槽、给料螺旋、底座组成。
工作时,由调速电动机通过联轴器带动减速机运转,并通过装在蜗轮减速机输出轴上的联轴器使给料螺旋转动,从而把上部料筒中的物料均匀送到下个工序。
1.Structure & Operating Principle: Refer to the general drawing for the structure of PAMF-type screw feeder, which is composed of AC adjustable-speed motor, worm-gear speed reducer, feeding trough, feeding screw and foundation.When the equipment works, the reducer revolves under the driving force generated by the adjustable-speed motor through the coupling, which makes the feeding screw revolveby the coupling installed on the output shaft of the worm-gear speed reducer to make the material in the upper cylinder uniformly delivered to the next process.二、特点:是结构新颖,坚固耐用,不存在堵塞现象,添加物料均匀,内壁上也没有结块现象发生,投入运行后效果显著,效率高,运行可靠,特别适合于浓缩过程中的絮凝剂添加和锌粉置换过程中的锌粉给料使用。
游戏控制器发展及Kinect底座拆解

不同游戏控制器的对比与发展不同游戏控制器的进化:●上方:最初Xbox手柄Controller S,现在的Kinect●中间:任天堂Virtual Boy,现在的Wiimote●下方:最初的索尼PlayStation手柄,现在的PlayStation Move我们比较喜欢当前的现状:不需要频繁的升级电脑,只要升级控制装置,就能让电脑更好的理解我们。
为Xbox增加Kinect就像是给潜水艇增加了声纳一样,你依然可以像过去一样四处游弋,但现在还能看清周围的环境。
当然,这个比喻有些牵强,你也可以想一个。
撕去内衬橡胶垫在Kinect底座下面有一层橡胶垫,小心的撕掉它后就可以进一步了解Kinect的内部结构。
这个底座内部拥有传动机构,当你在房间里做各种动作时,可以让顶部的传感器始终正确的指向你。
这个装置很有用,不过不知道它的强度如何。
拆解底座上的螺丝拿下塑料底座塑料底座马达的大小和硬币差不多微软Kinect底座里的马达和硬币大小差不多,还有几个脆弱的塑料齿轮,如果上方的感应部分没有过热问题的话,我们猜想这一部分将是Kinect的薄弱点。
散热格栅用了很多胶水粘合微软使用了体感识别体感识别技术厂商PrimeSense的设计,由于微软并未收购PrimeSense,这说明微软的软件也非常高级,能够将感应器采集的一系列数据转换成3D的空间定位网格图。
每个侧面都有三颗螺丝,其中一颗在贴纸下面打开后盖Kinect将所搜集到的信息压缩为两类:一个彩色图和一张深度图,然后将其处理后发给Xbox。
Kinect机身修长,主板被分为三部分,机身一侧还设置了一个小风扇Kinect的“眼睛”这些镜头并不像是手机里的那样小,而是像电脑配备的摄像头一样大,还能够自动对焦,根据微软的资料,红外摄像头的分辨率为320×240,彩色摄像头则达到了640×480.PrimeSense原理图上面是一张PrimeSense给出的原理图,Kinect是第一个,也是唯一一个在这个平台应用的产品。
机械毕业设计下围棋机器人手臂设计(含全套cad图纸)
下围棋机器人手臂设计
III
目录Байду номын сангаас
1. 绪论................................................................................................... 1
1.1. 引言 ....................................................................................................................1 1.2. 国内外发展概况 ................................................................................................1
I designed the Go under the robot arm, robot arm is the main components of the robot, how to make the robot's action is more humane, more efficient, stable and has been one of the main robot arm. The Go I designed robot arm consists of five degrees of freedom, using the joint coordinate system, action joint stepper motor-driven reducer reducer to avoid the cleaning of the hydraulic drive and pneumatic instability. Gripper to grab action driven by an electromagnet, the use of independent Motion Control Card control.
RST2使用手册

☆ ☆
☆
由于产品的改进,手册内容可能变更,恕不另行通知。 驱动器及电机内不附带任何维修配件,请勿私自拆卸;对驱动器及电机 的任何改动将使其保修权利失效; 本公司也不对由此引起的后果承担任 何责任。 阅读本手册前,请遵守以下安全防范说明。
安全防范说明
以下为此说明中将用到的警示标志 ———— ————
危险:表示错误的操作将可能导致人员伤亡! 注意:表示错误的操作将可能对人员造成伤害并损 坏设备或产品!
锐普德数控
RST系列交流伺服驱动器用户手册
非常感谢您选购和使用本公司交流伺服驱动器 请爱惜、爱护本产品! 在使用本驱动器之前,请务必仔细阅读本手册,按照所示规范进行操作使用
前 言
本说明书主要为用户提供驱动器的使用方法、系统参数、技术指标。由于 使用不当或错误的操作,可能会导致意外事故发生并影响产品的性能和使用寿 命,为使本产品更好地发挥其性能和更好地为您服务,请您在使用前认真阅读 本说明书。 在产品使用过程中如遇到任何不解,请查阅本说明书或拨打我们的技术支 持电话025-83328880。请您将对交流伺服驱动器的意见和更高要求告知我们, 我们会竭诚为您服务。
ii
锐普德数控
RST系列交流伺服驱动器用户手册
伺服电机 U、V、W 端子不可反接,不可接交流电源。 不可通过调换 U、V、W 端子改变电机转向。 伺服电机与伺服驱动器之间须直连,不能接入电容、电感或滤波器。 并接在输出信号直流继电器上的续流二极管不可接反。 通电前确认伺服驱动器和伺服电机已安装妥善,固定牢固,电源电压及接线 正确。 调试时伺服电机应先空载运转,确认参数设置无误后,再作负载调试,防止 因错误的操作导致机械和设备损坏。 应接入一个紧急停止电路,确保发生事故时,设备能立即停止运转,电源立 即被切断。 在复位一个报警之前,必须确认运行信号关断,否则会突然再启动。 伺服驱动器必须与规定的伺服电机配套使用。 附近有电磁干扰时,伺服驱动器电源接入隔离变压器和滤波器。 不要频繁接通、断开伺服系统电源,防止损坏系统。 伺服驱动器和伺服电机连续运转后可能发热,运行时和断电后的一段时间 内,不能触摸驱动器散热器和电机。
PCS-9611D_X_说明书_国内中文_国内标准版_X_R2.10
南京南瑞继保电气有限公司
技术支持,请联系: 电话:025-52107703、8008289967、4008289967 传真:025-52100770 或登陆网站:/ser_sup
公司地址:中S-9611D 线路保护装置
技术和使用说明书
前言
PCS-9611D 线路保护装置
使用产品前,请仔细阅读本章节!
本章叙述了使用产品前的安全预防建议。在安装和使用时,本章内容必须全部阅读且充分理解。 忽略说明书中相关警示说明,因不当操作造成的任何损害,本公司不承担相应责任。
在对本装置做任何操作前,相关专业人员必须仔细阅读本说明书,熟悉操作相关内容。 操作指导及警告
P/N:ZL_PCS-9611D_X_说明书_国内中文_国内标准版_X
购买产品,请联系: 电话:025-87178911,传真:025-52100511、025-52100512 电子信箱:market@
版本:R2.10
ii
南京南瑞继保电气有限公司
目录
PCS-9611D 线路保护装置
特别注意,一些通用的工作于高压带电设备的工作规则必须遵守。如果不遵守可能导致严重的 人身伤亡或设备损坏。
危险!
在一次系统带电运行时,绝对不允许将与装置连接的电流互感器二次开路。该回路开路可能会 产生极端危险的高压。
南京南瑞继保电气有限公司
i
PCS-9611D 线路保护装置
警告!
曝露端子 在装置带电时不要触碰曝露的端子等,因为可能会产生危险的高电压。
前言.................................................................................................................................................... i 目录.................................................................................................................................................. iii 第 1 章 概述...................................................................................................................................... 1
航盛维修手册统一版

www. hangsheng- sh. com
3.3.2.3 车内部半球摄像头................................................................28 3.3.2.3.1 车内部半球摄像头参数.....................................................28 3.3.2.3.2 车内部半球摄像头尺寸图.................................................28 3.3.2.3.3 车内部半球摄像头接口定义.............................................29 3.3.3 连接线参数 .............................................................................. 29 3.3.4 控制盒尺寸 .............................................................................. 29 3.3.5 系统连接总成图....................................................................... 29 3.4 故障排除指导 ..................................................................................... 30 3.5 注意事项 ............................................................................................ 30 影音类 ............................................................................................................... 31 4 高清播放器(固态存储).......................................................................... 31 4.1 功能描述 ............................................................................................. 31 4.2 系统组成 ............................................................................................. 31 4.2.1 产品图示 .................................................................................. 31 4.2.2 系统组成图 .............................................................................. 32 4.2.3 整机接线图 .............................................................................. 32 4.3 技术参数 ............................................................................................. 33 4.3.1 性能及技术参数....................................................................... 33 4.3.2 面板及定义 .............................................................................. 33 4.4 故障排除及维护指导.......................................................................... 34 4.4.1 故障排除 ................................................................................. 34 4.4.2 日常维护保养.......................................................................... 34 5 液晶显示器 ................................................................................................. 35 5.1 功能描述 ............................................................................................. 35 5.1.1 功能介绍:.............................................................................. 35 5.2 系统组成 ............................................................................................. 35
川崎机器人 E系列 手臂ID板手册

基板侧: 1318127-2
线束侧: 2-1318118-9
(连接器:1318108-1(AWG28 - 24)、1318107-1(AWG22 - 18))
引脚
功能
备注
A1 IO24 V B1 IO24G A2 IO24 V B2 IO24G A3 IP17 B3 IP18 A4 IP19 B4 IP20 A5 IP21 B5 IP22 A6 IP23 B6 IP24 A7 OP1 B7 OP2 A8 OP3 B8 OP4 A9 OP5 B9 OP6 A10 OP7 B10 OP8
3.0 功能 .............................................................. 13 3.1 机器人机种信息和调零数据的保持 ..................................... 13 3.2 维护记录 ........................................................... 13 3.2.1 维护记录的登录 ..................................................... 14 3.2.2 维护记录的显示 ..................................................... 16 3.2.3 维护记录的删除 ..................................................... 17
引脚
功能
备注
1
未使用
2
未使用
3
IO24G
24G
4
IO24 V
+24 V
LA42(B)按钮·指示灯(Φ16)

颜色
R(红) G(绿) Y(黄) W(白) S(蓝) B(黑)
4
带灯型
外形 带灯按钮 (圆形) 带灯按钮 (方形) 带灯按钮 (矩形) 带灯按钮 (方形)
工作状态 瞬动 自锁 瞬动 自锁 瞬动 自锁 瞬动 自锁
接点
11 22 11 22 11 22 11 22 11 22 11 22 11 22 11 22
二位置保持
钥匙钮 (方形)
45°
45°
三位置保持
90°
二位置保持
钥匙钮 (矩形)
45°
45°
三位置保持
说明:型号栏中 " □ " 处注明颜色
接点 11 22
22
11 22
22
11 22
22
型号 LA42(B)Y2-11/ □ LA42(B)Y2-22/ □
LA42(B)Y3-22/ □
LA42(B)Y2F-11/ □ LA42(B)Y2F-22/ □
按钮 (方形)
45°
45°
三位置保持
90°
二位置保持
按钮 (矩形)
45°
45°
三位置保持
说明:型号栏中 " □ " 处注明颜色
接点 11 22
2211 ຫໍສະໝຸດ 22211 22 22
型号 LA42(B)X2-11/ □ LA42(B)X2-22/ □
LA42(B)X3-22/ □ LA42(B)X2F-11/ □ LA42(B)X2F-22/ □
250 V AC/DC 3A
110 V 1.5 A 1A 0.5 A 0.2 A 纯银触点
220V 1A 0.7 A 0.2 A 0.1 A
新代参数设定参考手册--V9.5
新代科技參數設定說明手冊by : 新代科技date :2006/11/20ver : 9.5版本更新記錄目錄1.參數總表 (7)2.參數設定說明 (36)2.1 系統基本參數設定 (36)2.1.1 硬體環境設定 (36)2.1.1.1 軸卡基本參數設定 (36)2.1.1.1.1Pr01 軸板基址 (36)2.1.1.1.2Pr09 軸板型態 (37)2.1.1.1.3 Pr10 伺服警報接點型態 (37)2.1.1.1.4Pr11 軸卡時脈來源 (38)2.1.1.1.5Pr12 SERVO6 軸卡最高時脈 (38)2.1.1.1.6Pr13 軸卡數目 (38)2.1.1.2 I/O 卡基本參數設定 (39)2.1.1.2.1Pr03 I/O 板基址 (39)2.1.1.2.2Pr05 I/O 板組態 (39)2.1.1.2.3Pr15 I/O 卡數位濾波程度 (42)2.1.1.3 控制精度設定 (43)2.1.1.3.1 Pr17 控制精度 (43)2.1.1.4 螢幕功能鍵型態設定 (43)2.1.1.4.1 Pr3205 功能鍵型態 (43)2.1.1.5 螢幕型別 (44)2.1.1.5.1 Pr3211 螢幕型別 (44)2.1.1.6 預設外部存取資料磁碟機代號 (44)2.1.1.6.1 Pr3213 磁碟機代號 (44)2.1.1.7 選擇控制面板鍵盤型態 (44)2.1.1.7.1 Pr3217 選擇控制面板鍵盤型別 (44)2.1.1.8 系統掃瞄時間設定 (45)2.1.1.8.1 Pr3202 I/O 掃描時間 (45)2.1.1.8.2 Pr3203 運動補間時間 (45)2.1.1.8.3 Pr3204 PLC 掃描時間 (45)2.1.2 軟體介面環境參數設定 (46)2.1.2.1 應用功能參數設定 (46)2.1.2.1.1 Pr411 G00 運動方式 (46)2.1.2.1.2 Pr413 G92(G92.1)座標保留模式設定 (46)2.1.2.1.3 Pr414 工件座標系統保留模式 (46)2.1.2.1.4 Pr415 重置或關機時保留目前刀長資料 (47)2.1.2.1.5 Pr3207 C/S 界面版本編號 (47)2.1.2.1.6 Pr3215 選刀時呼叫副程式 (47)2.1.2.1.7 Pr3241 工件程式小數點型態 (47)2.1.2.1.8 Pr3243 鍵盤重置鍵由 PLC 處理 (48)2.1.2.1.10 Pr3801 G95 時進給量與主軸位置緊密偶合 (48)2.1.2.1.11 Pr3807 圓弧終點不在圓弧上檢查視窗 (49)2.1.2.1.12 Pr3809 UVW 為 XYZ 軸增量指令 (49)2.1.2.1.13 Pr3815 刀具半徑補償預看模式 (49)2.1.2.1.14 Pr3816 刀長補償模式 (49)2.1.2.1.15 Pr3819 過切檢查型態 (50)2.1.2.1.16 Pr3851 斷刀處理程式號碼 (50)2.1.2.2 系統人機介面設定 (51)2.1.2.2.1 Pr3201 設定啟動車床規則 (51)2.1.2.2.2 Pr3209 語言設定 (51)2.1.2.2.3 Pr3219 系統安裝組態 (52)2.1.2.2.4 Pr3221 除錯模式 (52)2.1.2.2.5 Pr3223 啟動系統管理功能 (53)2.1.2.2.6 Pr3225 螢幕保護功能延遲時間 (53)2.1.2.2.7 Pr3227 螢幕解析度 (53)2.1.2.2.8 Pr3229 關閉工件座標系統功能 (53)2.1.2.2.9 Pr3247 速率顯示方法 (54)2.2.伺服軸向參數設定 (55)2.2.1 各軸對應機械軸設定 (55)2.2.1.1 Pr21~Pr40 伺服對應的機械軸 (55)2.2.2 軸向馬達運動方向的設定 (55)2.2.2.1 Pr41~Pr60 馬達運動方向設定 (55)2.2.3 軸向命令與回授解析度設定 (56)2.2.3.1 Pr61~Pr80 位置感測器解析度 (56)Pr81~Pr100 軸卡回授倍頻 (56)Pr121~Pr160 螺桿側齒輪齒數,馬達側齒輪齒數 (56)Pr161~Pr180 螺桿寬度(Pitch) (56)Pr181~Pr200 伺服系統的位置迴路增益 (56)Pr201~Pr220 位置感測器型態 (56)Pr341~Pr360 位置命令倍率分子 (56)Pr361~Pr380 位置命令倍率分母 (56)2.2.4 各軸向應用型態設定 (58)2.2.4.1 Pr221~Pr226 軸型態 (58)2.2.4.2 Pr281~Pr300 選擇半徑軸或直徑軸 (59)2.2.5 各軸向顯示名稱設定 (59)2.2.5.1 P r321~Pr340 設定軸的名稱 (59)2.2.6 軸向控制模式設定 (60)2.2.6.1 Pr381~Pr400 位置伺服控制模式 (60)2.2.7 定位檢查功能設定 (60)2.2.7.1 Pr421~Pr440 切削時位置檢查的視窗範圍 (60)2.2.7.2 Pr481~Pr500 快速移動(Rapid T ravel, G00)時位置檢查的視窗範圍 (61)2.2.7.3 Pr561~Pr580 遺失位置檢查視窗 (61)2.2.8 各軸向左右軟體行程極限保護 (61)2.2.8.1 Pr2401~Pr2440 軟體第一行程保護的範圍 (61)2.2.8.2 Pr2441~Pr2480 軟體第二行程保護的範圍 (62)2.3.主軸參數設定 (63)2.3.1 主軸對應命令輸出埠設定 (63)2.3.1.1 Pr1621~Pr1630 主軸對應的機械軸或邏輯軸 (63)2.3.2 主軸命令參數設定 (63)2.3.2.1 Pr.1631~Pr.1636 主軸零速offset 速度 (63)2.3.2.2 Pr.1641~Pr.1646 主軸編碼器極性 (63)2.3.2.3 Pr.1651~Pr.1656 主軸馬達編碼器一轉的Pulse 數 (63)2.3.2.4 Pr.1661~Pr.1666 主軸回授倍頻 (64)2.3.2.5 Pr.1671~Pr.1676 主軸馬達增益 (64)2.3.2.6 Pr.1681~Pr.1692 主軸第一檔齒數比 (64)Pr.1901~Pr.1952 主軸第四檔齒數比 (64)2.3.2.7 P r.1711~Pr.1716 主軸是否安裝編碼器 (65)2.3.3 主軸運動轉速設定參數 (65)2.3.3.1 Pr.1721~Pr.1726 主軸寸動速度 (65)2.3.3.2 Pr.1731~Pr.1736 主軸最低轉速 (65)2.3.3.3 Pr.1801~Pr.1806 主軸最高轉速 (65)2.3.3.4 Pr.1821~Pr.1826 主軸伺服微分增益 (65)2.3.3.5 Pr.1831~Pr.1836 主軸加減速時間 (66)2.3.3.6 Pr.1851~Pr.1856 主軸重力加速度加減速時間 (66)2.3.4 主軸定位設定參數 (66)2.3.4.1 Pr.1741~Pr.1746 主軸定位速度 (66)2.3.4.2 Pr.1741~Pr.1746 主軸定位偏移量 (66)2.3.4.3 Pr.1771~Pr.1776 主軸原點偏移量 (66)2.3.4.4 Pr.1781~Pr.1786 主軸定位最低速度 (67)2.3.4.5 Pr.1791~Pr.1796 主軸馬達型態 (67)2.3.4.6 P r.1811~Pr.1816 主軸編碼器安裝位置 (67)2.3.4.7 Pr.1841~Pr.1846 主軸Y-Delta 切換速度 (67)2.4.軸向運動特性設定參數 (69)2.4.1 切削時前加減速運動規劃 (69)2.4.1.1 Pr401 切削加減速時間 (69)Pr402 重力加速度加減速時間 (69)Pr405 切削的最高進給速度 (69)Pr541~Pr560 各軸切削的加減速時間 (69)Pr621~Pr640 各軸切削的最高進給速度 (69)Pr641~Pr660 各軸重力加速度加減速時間 (69)2.4.2 切削時後加減速運動規劃 (71)2.4.2.1 Pr404 後加減速切削鐘型加減速時間 (71)2.4.3 切削時直線轉角自動減速功能 (73)2.4.3.1 P r406 轉角參考速度 (73)2.4.4 切削時圓弧切削運動最高進給速度設定 (74)2.4.4.1 Pr408 半徑5mm 圓弧切削參考速度 (74)2.4.5 快速移動及 JOG 時的加減速規劃 (75)2.4.5.1 Pr441~Pr460 各軸快速移動(G00)的加減速時間 (75)Pr461~Pr480 各軸快速移動(G00)的最高進給速度 (75)Pr501~Pr520 各軸快速移動(G00)的F0 速度 (75)Pr521~Pr540 各軸JOG 速度 (75)2.5.尋原點動作設定參數 (76)2.5.1 尋原點方式設定參數 (76)2.5.1.1 Pr961~Pr980 各軸尋原點方法 (76)2.5.2 尋原點動作規格與參數設定 (76)2.5.2.1 Pr821~Pr840 各軸第一段尋原點速度 (76)Pr841~Pr860 各軸第二段尋原點速度 (76)Pr861~Pr880 各軸尋原點為負方向 (76)2.5.3 原點偏移功能設定參數 (77)2.5.3.1 Pr881~Pr900 原點的偏移量設定 (77)2.5.4 原點柵格量功能設定參數 (78)2.5.4.1 Pr941~Pr960 啟動尋原點柵格功能 (78)2.6.手輪功能設定參數 (80)2.6.1 手輪訊號輸入設定參數 (80)2.6.1.1 Pr2031~Pr2034 手輪對應的機械軸 (80)2.6.2 手輪訊號解析度設定參數 (80)2.6.2.1 Pr2041~Pr2044 手輪Encoder 一轉的Pulse 數 (80)Pr2051~Pr2054 手輪回授倍頻 (80)2.6.3 手輪段數設定參數 (80)2.6.3.1 Pr2001 手輪第四段倍率設定 (80)2.6.4 手輪模擬功能設定參數 (81)2.6.4.1 Pr2003 手輪模擬對應手輪號碼 (81)2.6.5 手輪驅動軸向功能設定參數 (81)2.6.5.1 Pr2031~Pr2033 手輪對應的座標軸 (81)2.6.5 手輪設定參數 (81)2.6.5.1 Pr2031~Pr2033 手輪對應的座標軸 (81)2.7.機構補償功能設定參數 (82)2.7.1 尖角誤差補償設定參數 (82)2.7.1.1 Pr1361~Pr1380 圓弧尖角正向誤差補償量 (82)Pr1381~Pr1400 圓弧尖角誤差補償時間常數 (82)Pr1361~Pr1400 圓弧尖角負向誤差補償量 (82)2.8.軸耦合功能設定參數 (85)2.8.1 軸耦合功能設定參數 (85)2.8.1.1 Pr1361~Pr1380 圓弧尖角正向誤差補償量 (85)Pr1381~Pr1400 圓弧尖角誤差補償時間常數 (85)Pr1361~Pr1400 圓弧尖角負向誤差補償量 (85)1.參數總表2.參數設定說明2.1 系統基本參數設定2.1.1 硬體環境設定2.1.1.1 軸卡基本參數設定2.1.1.1.1 Pr01 軸板基址1.Servo_4 軸卡對應 I/O 基址與跳線規則:軸卡二片以下 Pr01今800 軸卡超過二片 Pr01今7682.S ervo_6 的第一片軸卡基址為768(目前一部控制器僅支援一張 Servo_6,不可與 Servo_4 混插)3.E mbedded 第一片軸卡基址固定為5122.1.1.1.2 Pr09 軸板型態0:EMP21:SVO4+不檢查伺服警報2:SVO4+伺服警報接點為常開接點 Normal Open( A 接點)3:SVO4+伺服警報接點為常閉接點 Normal Close( B 接點)4:EMP45:SERVO69:虛擬軸卡2.1.1.1.3 Pr10 伺服警報接點型態0: SERVO 6 軸卡警報為常開接點 Normal Open( A 接點)1: SERVO 6 軸卡警報為常閉接點 Normal Close( B 接點)2.1.1.1.4 Pr11 軸卡時脈來源此參數為設定軸卡時脈來源:設定 0 為使用軸卡自已時脈設定 1 為共用控制器底板 IPC Bus 時脈設定 2 為共用主機板 VIA 時脈設定原則:一體機控制器今請設定『0』非一體機控制器今請設定『2』舊型 486 主機板控制器今請設定『1』2.1.1.1.5 Pr12 SERVO6 軸卡最高時脈此參數為設定 Servo6 軸版最高時脈。
华成多轴机械手控制系统说明书 V

3.3.1 自动运行数据的监视 .................................................................................................. 11
3.3.2 自动运行时参数的修改 .....................................................................................面及轴定义 ................................................................................................................... 3
2.2.1 主画面说明.................................................................................................................... 3
4.2 程序教导 ............................................................................................................................. 14
4.2.1 轴动作的教导 .............................................................................................................. 15
3.1 原点复归 ............................................................................................................................... 4
螺旋夹紧器

摘要螺旋夹紧器是利用人力作用使螺杆上下做直线运动为原理的简单机械机构,使用起来比较方便,可用于科研、化工、工业等场所。
本设计是用于较小工件、零件等机加工时常用的螺旋夹紧器装置,它可以将螺旋运动转换为直线运动,实现使用较小的人力去固定和夹紧物体,从而达到减轻人类劳动、提高劳动生产效率。
其工作原理是通过人力作用,将动力传导到螺旋副,使螺杆上下作直线运动达到固定和夹紧作用。
所设计的螺旋夹紧器是以零件的设计计算与校核为主要内容的设计,包括螺旋副、螺杆和螺母的设计计算与校核及其它零部件的选择确定,最后运用AutoCAD软件分别画出所设计的螺旋夹紧器的各个零部件及装配图。
关键词:螺旋,夹紧器,设计ABSTRACTScrew Clamp is the use of human role to screw up and down to do a simple linear motion machinery for the principle of agency, so that it is more convenient to operate, can be used for research, chemicals, industry and other places. This design is used for spiral clamping device where small parts and machine parts are processed, which can convert the spiral movement to linear motion. It can make an achievement of using smaller manpower to fix and clamp objects. Therefore, human labor is relieved and working productivity is improved. Its principle is that through the manpower, the power is transmitted to the screw to make it up and down in a straight line to reach the effect of fixing and clamping. The main content of the design of the spiral clamp is calculation and checking of machine parts, which include screw pair, screw and nut and other parts‟ selection. Finally using AutoCAD software respectively work out all the parts and assembly drawing of the Screw Clamp design.KEYWORDS: screw, clamp, design目录前言 (1)第1章课题要求 (2)1.1主要内容与要求 (2)1.2主要技术指标 (2)第2章方案的拟定 (3)第3章螺旋副及其结构设计 (5)3.1螺杆设计与计算 (6)3.1.1材料选择 (6)3.1.2尺寸设计 (6)3.1.3螺杆尺寸校核与确定 (9)3.2螺母设计与计算 (13)3.2.1材料选择 (13)3.2.2尺寸设计 (13)3.2.3螺母尺寸校核与确定 (15)第4章其它零部件及其结构设计 (17)4.1手柄设计 (17)4.1.1材料选择 (17)4.1.2尺寸设计与确定 (17)4.2基座设计 (18)4.2.1材料选择 (18)4.2.2尺寸设计与确定 (18)4.3机架设计 (19)4.3.1材料选择 (19)4.3.2尺寸设计与确定 (19)4.4其他零部件设计 (19)第5章结论 (20)致谢 (21)参考文献 (22)附录1 (23)附录2 (24)前言人类在长期的生产实践中创造了机器,并使其不断发展形成了当今多种多样的类型。
LE-300 320 400 420整机维修手册
LE-300/320/400/420整机维修手册上海雄博精密仪器股份有限公司地址:上海市业绩路800号 邮编:200444E-mail:****************LE-300/320/400/420整机维修手册版本号:2010年1月1日编辑刘德国目录一、磨边机预备知识 (3)1、磨边机外观介绍 (3)2、磨边机内部介绍 (4)3、磨边机主板介绍 (5)4、磨边机原理概述 (5)5、电机与离合器的功能 (5)6、主要接插件、光电开关、微动开关和银触点的功能 (6)7、按键板示意图 (6)8、按键板功能简介 (9)二、开机后,显示器及按键指示灯无显示 (9)三、开机复位时,机头一直往上顶且发出异响 (11)四、开机复位时,机头抬起后未向右移动或移动速度和落位不正常 (12)五、开机复位时,机头抬至正常位置没向右移动 (13)六、开机复位时,机头不抬起或抬起时速度不正常或有咝咝声 (14)七、开机复位时,机头未抬起就一直右移 (15)八、机头旋转电机相关故障 (16)九、夹片相关故障 (17)十、校位时发生的故障 (19)十一、按SW 6“TEST”键,主电机不转 (20)十二、按SW 10“START”键无反应 (21)十三、磨片时,机头一直在砂轮上磨个不停 (22)十四、磨片时,镜片出现打滑现象 (23)十五、磨片时,粗磨完成后,V型细磨磨不到 (24)十六、磨片时,镜片偏于砂轮一侧,按左右移键不起作用 (24)十七、夹片或磨片时会碎片 (25)十八、抛光时,树脂有崩边现象或有抛光变形 (26)十九、附(校位) (27)二十、附(砂轮调整方法) (30)一、 磨边机预备知识(此处仅示意LE-300相关图片及图解说明,其它型号略)1、磨边机外观介绍图解说明:(1)外盖<隔音盖> (2)机头压力调节杆(3)模板夹头 (4)机头底座传感器<游标头>(5)电源插头 (6)水平调节脚(7)防水内盖 (8)机头(9)镜片夹头 (10)砂轮(11)控制面板 (12)电源开关(13)进水管 (14)水流量开关(15)水泵电源插头 (16)水泵(17)排水管 (18)水箱2、磨边机内部介绍A、主机正面相关部件B、主机右侧相关部件C、主机后面相关部件D、主机左侧相关部件E、机头内相关部件F、铝板后相关部件3、磨边机主板介绍4、磨边机原理概述根据模板镜片的镜片材质(玻璃材质、树脂材质、PC材质等)、尺寸大小、镜片类型(圆形镜片、小寸片、直角片等)、镜片边形(平边、尖边)等,通过主板电子电路控制磨边机做适当机械运动后磨出和模板相同的眼镜镜片5、电机与离合器的功能A.主 电 机(如图1):控制整个砂轮在一个方向上旋转B.离 合 器(如图2):和水平步进电机配合在一起控制机头做水平左右移动C.水平 步进 电机(如图3):和离合器配合在一起控制机头做水平左右移动D.垂直 步进 电机(如图4):控制游标头和机头同时做上下升降运动E.机头内交流电机(如图5):控制旋转轴正反方向旋转F.机头内直流电机(如图6):控制旋转轴夹片退片图1 图2图3 图4图5 图66、主要接插件、光电开关、微动开关和银触点的功能J 2:开关电源接头,由电源盒供给主板DC 24V与DC 5VJ 9:主马达控制端J10:交流电机控制端J11:夹片电机控制端J12:离合器控制端J13:游标头升降电机控制端J14:机头水平电机控制端J15:主板24V DC 输出端J16:主板5V DC 输出端J17:水泵控制线J 3光电开关GK112:中间检测,此点为零点,垂直步进电机从此开始计上升的步数 J 4光电开关GK102:上限位,控制机头上升和下降的高度J 5 微动开关 SS-5:下限位,控制机头复位时下降到的最低点J 6 上 下 银 触点:控制游标镜片正反转J 7光电开关GK-05:计镜片旋转的圈数J 8 微动开关 SS-5:右限位,控制机头水平移动到最右端的位置7、按键板示意图sw1sw2 sw3 sw4 sw5 sw6sw7 sw8 sw9 sw10 sw11 sw12sw14sw13D1D2 D3 D4D5D6D7D8D9D10D11D12D13D14注:图中D x附近的圆都表示第x个发光二极管;sw x表示第x个按键。
400酸洗线装配动作说明图
“图样代号”DCBA564123D CB A描校描图借(通)用件登记零 件 代 号并可任意设置)。
20#下料工位:吊运到此工位后人工控制上下料 2.起吊出液面,在液面上固定高度旋转至少一周,并有吹扫装置对表面残留液体进行吹扫,以将工件表面残留液体吹净(启动槽边高压吹扫电磁阀,调离后停止复位)。
旋转,浸泡一段时间后(浸泡停留时间可调,在1s~360s 之间……;……)。
触摸屏页面设置,请参问“设备使用商”负么动作);4.如果下一工位有小车占据,则小车到达本工位后,不进行动屏面板上及数显测距器上同时显示相同数据,然后人工按“点位切数据)。
开。
小车到位到同时液体搅拌装置开始工作(吹气搅拌,气路0B02……;C01,C02,5.根据上料参数测量出来的“高度”,指工件下降到槽液深8#硝酸槽工位:1.小车在前一工位时,此工位自动开合罩子打同的深度设置(在工控机上,随时能找到这个料号产品的一6.如果下一工位有小车占据,则在本工位等待。
,下料完后人工按启动按钮,小车自动运行到上料工位,如果上料工位有小车占据,则原地等待。
度,绑架该料号直至完成所有酸洗工艺,每一个料号具有不后进入下一工位。
离开此工位后自动开合罩子合拢。
电磁阀控制,小车离开后停止)。
吊具在工件进入液面后开始3.小车车完成浸泡后,上升到运行高度并停留一定时间,以便在触摸屏与工控机上,随行可以查看该料号在某一个槽做什确认键”确认,工件进入自动酸洗流程程序(绑料号执行,3.上料参数设定区具有压力传感器确保每部吊车降到责人;4.采用红外数显测距器,确定工件最高位置点后,数显测距置(进行原始复位);器测量出工件需要清洗高度,数值自动输入系统,并在触摸作,等待下一工位空出后再进行动作。
液体离开工件表面(滴水时间在1s~30s 之间可任意设置),然3#参数输入工位:1.具有10寸或以上触摸屏,含屏幕亚克力透明保护罩;2. 绑定料号,带料入槽,(如:A01,A02……;B01,触摸屏10寸或以上,共2套(工件上料参数设定区与电箱放置处各一套);1.界面参考如:系统总画面;参数设置(含:上料区料号绑定,工件槽内浸泡时间设置,提升滴水时间设置,升降横移速度快慢设置,高压吹扫时间设置等);吊车运行状态监视(ABCD 四车独立显示如:上升下降,左移右移,吊钩旋转,浸泡等待,滴水等待,故障代码,自动式,手动式,寸动式,目标槽位,当前槽位,单周期运行时间显示,连续运行时间显示,连续周期运转总数等);周边设备控制(如有:超音波2套,过滤机3套,加热槽加热器1套,加药机3套,及备用3套等,具有自动与手动开关可任意切换);故障显示说明(显示故障内容与排除方案备用小车,当有行车遇到故障,故障的小车前的运行小车继续运行,后面的按照程序完成最近到清水洗后停于清水工位,带故障排除后继续运行。
爱德华分子泵控制器
TIC 仪表控制器 TIC 仪表控制器 6- 压力表 TIC 仪表控制器 6- 压力表电容器压力计 TIC Turbo 控制器 100 W TIC Turbo 控制器 200 W
TIC Turbo 与仪表控制器 100 W
TIC Turbo 与仪表控制器 200 W
D397-00-000 D397-01-000 D397-02-000 D397-11-000 D397-12-000 D397-21-000 D397-22-000
操作 ............................................................................................... 17
前面板说明 ............................................................................................................... 17 菜单结构 .................................................................................................................. 18 菜单导航 .................................................................................................................. 19 视图屏幕 .................................................................................................................. 19 打开 / 关闭压力表和继电器 ............................................................................................19 更改列表项 ............................................................................................................... 20 更改数字值 ............................................................................................................... 20 输入负指数 (如 5.00E-03) ...........................................................................................21 压力表设置 ............................................................................................................... 21 默认设置选项 (所有压力表) ......................................................................................... 22 压力表状态消息 .........................................................................................................22 有源皮拉尼压力表 (APG) ...............................................................................................22 有源线性皮拉尼压力表 (APGX) ........................................................................................ 23 有源热电偶压力表 (ATC-E) 控制 ...................................................................................... 24 有源应变压力表 (ASG) 控制 ............................................................................................25 有源倒磁控管 (AIM) 压力表控制 ....................................................................................... 26 有源离子压力表 (AIGX-S) 控制 ........................................................................................ 27 宽范围压力表 (WRG) ....................................................................................................28 警报 ....................................................................................................................... 30 主菜单 .................................................................................................................... 30 链接压力表 ............................................................................................................... 30 参数 / 单位 ............................................................................................................... 31 屏幕选项 .................................................................................................................. 31 组织视图屏幕上的压力表 ..............................................................................................32
xbox360接头图纸

XBOX 360 Motherboard Headersand ConnectorVersion 1.4DisclaimerThe information contained in this document was obtained from the public domain and/or my own reverse engineering and is provided in good faith but no warranty can be made for its accuracy. Any opinions expressed are entirely those of myself and cannot be taken to represent the views of past, present or future employers.I do not support piracy or the illegal copying of copyright material. I'm only seeking the ability to run custom software and push the hardware to it's maximum potential. Remember that a profitable game industry will guarantee us all amazing products for the future.If you notice something incorrect or have any comment, please feel free to contact me.Speedy22xbox.360@IntroductionMost of the information was based on the top and bottom layers of a dechipped 360 motherboard and decapped chips, I will update the information once I gain full knowledge of the inner layers of the motherboard.For reference, I have also included some information I have gathered from images of Development Hardware and XDK hardware found on the net.Please double-check my information, I am human and I do make mistakes. I have also attempted to give credit where credit was due. If you find any errors or omissions, please let me know so that I can correct it on future versions.Like most, I am doing this as a hobby in my spare time, so I will do my best to keep the information up to date but I can not make any guarantees.I am currently looking for a supplier/manufacturer for the following components;Controller Headset PortBoth the Male and FemaleConnector.Memory Card PortMale Connector(On Memory Card)RF Module PortMale Connector(On RF Module)Hard Drive PortMale Connector(On Hard Drive)My current employment position will be changing in the near future, so I will be open for new opportunities. I am a Canadian citizen living in Waterloo, ON, Canada with a background in Electronics Engineering and Management. Feel free to contact me for more details.Speedy22xbox.360@Table of ContentMotherboard Block Diagram . . . . . . . . . . . . . . . . 2 J1A1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 J2A1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 J3A1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 J9A1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 J9A2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 J2B1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 J1C1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 J5C1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 J5C2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 J8C1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 J1D1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 J1D2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 J2D1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 J2D2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 J1E1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 J1F1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 J7F1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 J3G1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 J6G1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 J7G1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 J7G2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 J9G1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 AppendixDocument Changes . . . . . . . . . . . . . . . . . . . . 25 Unique per Console Numbers . . . . . . . . . . . . . . .26 Retail Motherboard Differences . . . . . . . . . . . . . . 27 Dashboard Updates . . . . . . . . . . . . . . . . . . . . .28 System Requirements . . . . . . . . . . . . . . . . . . .29 Retail Block Diagram . . . . . . . . . . . . . . . . . . . .30 XeDK Block Diagram . . . . . . . . . . . . . . . . . . . .31 HDK Block Diagram . . . . . . . . . . . . . . . . . . . . .32 Memory Map . . . . . . . . . . . . . . . . . . . . . . . .33 CPU Pinout (BGAout) . . . . . . . . . . . . . . . . . . . .34 GPU Pinout (BGAout) . . . . . . . . . . . . . . . . . . .35 Southbridge Pinout (BGAout). . . . . . . . . . . . . . . .36Detailed Motherboard Block Diagram Not in this Public Release10/100 Base-T Ethernet and USB Port1Green LED9RD+2Green LED10CT3Yellow LED11RD-4Yellow LED12+5 VDC5TD+13Data -6CT14Data +7TD-15GND8Shield GND16Pin 9 J6G1Manufacturer: Bel Stewart ConnectorsProduct Name and #: Magjack SI-80039-FNotes:Green and Yellow LEDs are not present, but all the connection are available on the 360 Motherboard. (Version 11)LEDs are present on the 360's XDK motherboard. (Version 9)Pin 16 connects to Pin 9 of J6G1 the RF Module.Video and Audio Port1Red Gnd 2Green Ground3Red (Cr in HDTV mode) 4Green (Y in HDTV mode) 5Composite Gnd 6Blue Ground7Composite (Sync in RGB mode) 8Blue (Cb in HDTV mode) 9H-sync Gnd 10V-sync Gnd11H-sync (VGA Mode) 12V-sync (VGA Mode)13Audio-R Gnd 14Audio-L Gnd15Audio-R 16Audio-L17Switching voltage (for SCART pin-8) 18CBL-ID119Blanking Signal (for SCART pin-16) 20CBL-ID1.121Unknown22CBL-ID223Unknown24CBL-ID2.125Optical - Audio (SPDIF) 26CBL-ID327Optical - Gnd (SPDIF) 28CBL-ID3.129Optical - +5V 30See J2B1 or J8C1 Setting Cable ID:ID1-1.1 = VGA mode enabledID2-2.1 and ID3-3.1 = RGB (SCART) mode enabledID3-3.1 = HDTV (Y/Cb/Cr) mode enabledID2-2.1 = Composite (TV) mode enabledManufacturer: UnknownProduct: UnkownNote:Source: (corrected Pin#s and added pin 30)Fan Connector1GND Blue2V+Brown3GND Black4V+Red Manufacturer: FoxconnProduct:Note:V+ Starts at +5.4 VDC and climbs to +11.8 VDC within 30 sec of power on.DC Power Port1GND6+12 VDC2GND7Power Enable3GND8+5 VDC (Standby)4+12 VDC9Shield (GND)5+12 VDC10Shield (GND) Note:Pin 7 Turns Pins 4, 5, 6 on when it is tied to ground.Power Supply is difficult to open up. I would not recommend it.1) Remove rubber feet (they are glued in place). This will probably destroy them.2) Dig out all the glue, including the glue in the head of the philips screws.3) Remove the 4 screws.4) Remove bottom cover.5) Remove the two philips screws. One on each side of the heat sink.6) Gently wiggle circuit board out of the top cover. The DC supply side should lift up first. Heat sink grease is preventing the easy removal of the circuit board. Continue to wiggle the circuit board until the grease bond is broken.XDK DC Power1+5 VDC (Standby)2GND Manufacturer: UnknownPart #: UnknownNote:This connector is used to supply power to the extra circuitry used in the XDK (motherboard version 009).The circuitry is located in the "Sidecar" that attaches to the hard drive side of the xbox 360.J2B1XDK Debug HeaderPower ON Power Off Data Present 1RX - U2C1 pin 15D1+3.3 VDC0No 2TX- U2C1 pin 14D1+3.3 VDC0No 3NC00No 4Connects to U2C1 pin 16B+3.3 VDC+3.3 VDC No 5Eject2+3 VDC0No 6Connects to U2C1 pin 16C00No 7+3.3 VDC (Standby)+3.3 VDC+3.3 VDC No 8+3.3 VDC+3.3 VDC0No 9SDA+3.3 VDC+3.3 VDC Yes 10SCL+3.3 VDC+3.3 VDC Yes 11See Schematics+3.3 VDC+3.3 VDC No 12GND00No 13+5 VDC (Standby)+3.3 VDC+5 VDC NoNote:1) Speculation: Document posted on and suggests that these pins are UART operating at115000 bps.2) Quick pulse Ejects, otherwise 360 immediately shuts down.J1C1DVD SATA Connector1GND2A+3A-4GND5B-6B+7GNDManufacturer: TycoPart #: UnkownNote:Standard SATA interface.Each DVD drive has a unique ID key. (source: )J5C1ANA HeaderPower ON Power Off Data Present 1Connects to Pin 71 of U4B1+1.8 VDC+1.8 VDC No2Connects to Pin 70 of U4B1+1.8 VDC+1.8 VDC No3Connects to Pin 69 of U4B100No4Unknown00No5Connects to Pin 72 of U4B100No6GND 00NoJ5C2GPU SPI EEPROM HeaderPower ON Power OFF Data Present 1SCK00high on startup 2SO003SI004/WP+1.8 VDC+1.8 VDC5/CS+1.8 VDC+1.8 VDC brief activity at startup 6GND00Note:J8C1CPU JTAG HeaderPower ON Power OFF Data Present 100No2+1.1 VDC0No3+1.8 VDC+1.8 VDC0No4+1.8 VDC0No5GND00No6+1.8 VDC0No7+1.8 VDC0No8+1.8 VDC0No9+3.3 VDC+3.3 VDC No10+1.8 VDC0No Note:Images indicate this port was used during hardware development.Pin 9 was not used in HDK image.The pin header is also present on the XDK version 9 motherboard.Speculation: GPULDBG, Inputs - TDI, TMS, TCK, Output -TDO, and RESETJ1D1DVD Power Connector1NC7GND2NC8+5 VDC3Open/Close9GND4Tray Status10+12 VDC5GND11GND6+3.3 VDC12+12 VDC Manufacturer:Part #:Notes:Open/Close: momentary tied to gnd to open/close drive door. Tray Status: +3.3 VDC tray is open. 0 v tray is closed. Source: J1D2XDK Debug Header #2Power ON Power OFF Data Present 1Connects to U2C1 pin 5Y00No2Connects to U2C1 pin 5AA+3.3 VDC+3.3 VDC No3Connects to U2C1 pin 3U00No4Connects to U2C1 pin 5AB+3.3 VDC+3.3 VDC No5+5 VDC (Standby)+5 VDC +5 VDC No6GND00No7GND00No8Unknown00No9Unknown00No Note:This port is used in the XDK version 9 motherboard. The connector is routed into the XDK "Sidecar" expansion module.J2D1Southbridge HeaderPower ON Power OFF Data Present 1Connects to U2C1 pin 21V+1.8 VDC0No2Connects to U2C1 pin 22W+1.8 VDC0No3Connects to U2C1 pin 22V00No4Connects to U2C1 pin 21W00No5Connects to U2C1 pin 20W00No6GND00NoJ2D2GPU HeaderPower ON Power OFF Data Present 1Connects to U4D1 pin 12E+1.9 VDC0No2Connects to U4D1 pin 12F+1.9 VDC0No3Connects to U4D1 pin 12D00No4Connects to U4D1 pin 11G00No5Connects to U4D1 pin 13E00No6GND00No7See Note+1.9 VDC0No8Connects to U4D1 pin 13G00No Note:There are images of a XDK motherboard (version 9) on the Internet that shows a green wire connecting Pin 5 to the Southbridge(21J).Pin 7 - still working on it.J1E1Hard Drive SATA Connector1GND8GND2A+9GND3A-10GND4GND11+5 VDC5B-12+5 VDC6B+13+5 VDC7GND14+5 VDC (standby) Manufacturer: Unknown-Made in ChinaPart #: XB00351-002J1F1Southbridge LED HeaderPower ONPower OFFData Present1+5 VDC +5 VDC 0No 2GND00No 3Connects to U2C1 pin 20D +3.3 VDC0No 4Connects to U2C1 pin 21D 00No 5Connects to U2C1 pin 22D +3.3 CLK+3.3 CLKOFF- 1.25 hz ON - Activity6Connects to U2C1 pin 21CNoNote:Some images of the pre version 9 360 motherboard show LEDs connected to this Port.J7F1CPU SPI EEPROM Header1SCK4/WP2SO5/CS3SI6GNDNote:Header and eeprom is present on 360's XDK (Version 9)Eeprom is missing on some Version 11 motherboards.Connects to the SPI serial eeprom (AT25020) then it probably connects to the Misc I/O bus on the CPU.J3G1Front Memory Card A & B ConnectorA B6GND1GND7+3.3 VDC2+3.3 VDC8USB Data -3USB Data -9USB Data +4USB Data +10GND5GNDNote:USB is 3.3 VDC, Same as RF Module.J6G1RF Module Connector1+3.3 VDC5See Note2USB Data -6Serial Data3USB Data +7Serial CLK4GND8GND9See Note Note:USB is 3.3 VDC, same as memory card portPin 5 Power ON/OFF (momentary tied to gnd to power ON/OFF)Pin 5 goes to southbridge 21EPin 9 goes to Pin 16 of J1A1 (extra pin on the back USB port) but is not connected to anything on the RF Module.J7G1Aux Power Header1GND2+12 VDC13GND Note:1) This port is not active. A resistor or jumper needs to be added to the bottomside of the motherboard were R7V7 should be.Header missing on 360 XDK motherboard Version 9.Header missing on 360 Retail motherboard Version 11.J7G2VID Port1VCC8VID12VID49PWM13FBRTN10VID04VID311PWM25PWRGD12VID56VID213PWM37EN14GNDNote:Pure SpeculationThe Voltage Identification (VID) port was present on early version(s) of the 360 motherboard. (pre Version 9)I have speculated what the connections were.To learn more download the datasheet for the ADP3188. (Analog Devices)J9G1Front Dual USB PortBottom Port Top Port1+5 VDC5+5 VDC 2USB Data -6USB Data -3USB Data +7USB Data + 4GND8GNDAppendix Document VersionVersion 1.0Dec 15, 2005Just PinoutsVersion 1.1Dec 30, 2005Added Photos & Diagrams Version 1.2Jan 6, 2006Changed FormatVersion 1.3 Feb 2, 2006Added SchematicsPrivate ReleaseVersion 1.4 Feb 15, 2006Corrected SchematicsAdded AppendixAdded Block DiagramCurrent DocumentUnique Per Console NumbersL = Production line in the factoryNNNNNN = Xbox in the weekY = Year (last digit)WW = week of the year *FF = Factory # (05 & 06 are China, 05 appears to supply Europe and 06 supplies North America)MM = MonthX = unknown at this time" " = Actual Text* Factory 05 is a week ahead of factory 06 for the 2005 year. This means any 360 made during the last week of December 2005 should have a WW=53 in the serial #.Serial Number = LNNNNNNYWWFF (Source: )Product ID = XXXXXXXXLNNNNNNYWWFFMotherboard = XXXXXXXXXXXXYWWXConsole ID = XXXXXXXXXXXXWired MAC = Unique 12 digit (hex, meaning each digit has the possibility of being a value of 0-F)RF Module = XXXXXXXXXXXYWWDVD Serial # (Hitachi-LG) = YMM"HG"XXXXXXDVD Serial # (Toshiba- Samsung) = X"RCY"XXXXXXRetail Motherboard Differences Motherboard Version 011CPU SPI eeprom: Present or AbsentCPU: Engraved "Canada" or "Taiwan"Tilt Switch: Surface Mount or Thru Hole MountBios Label: Present or Absent10/100 base-TX Ethernet Transceiver: "Big" or "Small"Header Holes: Filled in with solder, partially filled or not filled.Bios/Kernel Versions and Updates Displayed in the dashboard.D: = DashboardK: = KernelBK: = (Backup Kernel, Bios Kernel, Base Kernel, etc) - Not sure2.0.0198.0First image of a XDK Launcher Screen. Show version in the right hand corner.I'm guessing it's an Alpha. (Source Image: I forget)2.0.1232.0 Alpha 2Image of a XDK Launcher Screen. Alpha 2 is displayed beside version #.(Source Image: I forget)2.0.1839.2XeDK release Dashboard. (smartxx images)2.0.1888.0Sept-Oct Production Line for Retail Release2.0.2241.0Late Oct-Early Nov Production Line, Nov 22 available over xbox live.* Unknown2.0.2255.0Jan 30 production line, Jan 30 available over xbox live* Improved logic around deciding if saved games should be deleted and offer the option to only delete the profile and to leave all save data.* Users reporting blank Friends List on the Xbox 360 dash after muting a friend while playing a game in Backwards Compatibility mode.* Improved synching of games played to Web and in console.* Network settings: keyboard does now allow entry of - (dash) character in the keyboard.* Improvements to the Xbox Guide.* Increased accuracy of "last time played."* Network configuration improvements for Xbox Live members in the Netherlands.* More detailed messaging for unreadable disk or region errors.* Blocked the Kiosk Disc from being recognized when inserted into the DVD tray.(Source: I forget, so let me know so I can provide proper credit)System RequirementsAbsolute MinimumMotherboard, Power Supply (12 volt 16amp, 5 volt 1amp), Video Cable, and a momentary pushbutton switch (for power on/off).I have tested this with dashboard 1888 and 2241. A dashboard update could change this.Absolute Minimum to play games or DVDsAs above, but subtract the push button and add the DVD player and a wired controller.Absolute Minimum to play just DVDsAs above, but the remote can be used instead of the wire controller.Remember that this could change with a dashboard update.RetailNote:Flash Bios Version 2.0.1888.0Note:Appears to be a final version of the XeDK.Flash Bios Version 2.0.1839.2Also known as XDK.Used in conjunction with the SDK (Software Development Kit).Most likely, the XeDK is also connected to a network with various PCs running SDK.Source: Note:No DVD connected. Source: Memory Map Not in this Public ReleaseNot in this Public ReleaseNot in this Public ReleaseSouthbridge Pinout Not in this Public ReleaseLeft Blank。