Zeta_Training_sc
互联网企业财务风险管理研究—以M公司为例

post training 方法

post training 方法Post Training 方法1. 什么是 Post Training 方法?Post Training 方法是一种用于改进和优化机器学习模型的技术。
它基于对已经训练好的模型进行进一步的优化和调整,以使模型在实际应用中更加准确和可靠。
2. 常见的 Post Training 方法以下是一些常见的 Post Training 方法:•模型微调(Fine-tuning)模型微调是指在已经训练好的模型上继续进行训练,使用新的数据集或扩展数据集,并调整模型的参数以提高性能。
这种方法常用于迁移学习和领域适应任务。
•层次解析(Layer-wise Analysis)层次解析是通过对模型的不同层级进行分析,了解模型中每个层级的作用和贡献。
这可以帮助我们发现问题所在,并根据需要进行相应的调整。
•模型压缩与加速(Model Compression and Acceleration)模型压缩与加速的方法旨在减少模型的存储空间和计算量,以提高模型的效率和速度。
例如,参数剪枝、量化和深度可分离卷积等技术可以用于减少模型的复杂度。
•模型集成(Model Ensemble)模型集成是将多个不同的模型组合在一起,通过投票或加权平均的方式来做出预测。
这种方法可以显著改善模型的鲁棒性和准确性。
3. 使用 Post Training 方法的步骤使用 Post Training 方法可以通过以下步骤来完成:1.选择适当的方法:根据实际需求和问题的特点,选择合适的 Post Training 方法进行模型优化。
2.准备数据:根据选定的方法,准备相应的数据集或样本集,以用于模型的进一步训练或分析。
3.调整模型参数:根据需要,调整模型的参数以适应新的数据集或任务要求。
4.评估模型性能:使用评估指标对优化后的模型进行性能测试,以判断模型是否达到预期的效果或是否还需要进一步改进。
5.迭代优化:根据评估结果,对模型进行迭代优化,不断改进模型的性能和效果。
生成亚像素光条提取并生成点集进行双目三维重建和圆柱拟合求半径的程序-概述说明以及解释

生成亚像素光条提取并生成点集进行双目三维重建和圆柱拟合求半径的程序-概述说明以及解释1.引言概述部分是文章的引言,用于向读者介绍本文的研究背景、目的和重要性。
首先,我们需要简要概括本文要解决的问题和研究内容。
然后,可以介绍相关领域的现状和该问题存在的挑战。
最后,强调本文的研究目的和创新点。
以下是1.1 概述部分的内容参考:"亚像素光条提取、双目三维重建以及圆柱拟合求半径是计算机视觉领域中的研究热点。
本文旨在研究一种新的方法,通过生成亚像素光条提取并生成点集,实现双目三维重建和圆柱拟合求半径的程序。
这一方法具有广泛的应用前景,可在工业制造、机器人导航、虚拟现实等领域中发挥重要作用。
在过去的几十年里,图像处理和计算机视觉技术取得了巨大的进展,但在亚像素光条提取、双目三维重建和圆柱拟合求半径方面仍然存在一些挑战。
传统的方法通常受限于像素级别的精度,难以捕捉到细节信息,而新的亚像素光条提取技术通过子像素级别的精确度,提供更精确的图像信息。
本文的主要目的是通过结合亚像素光条提取、双目三维重建和圆柱拟合求半径的程序,实现对三维场景的精确重建和圆柱体参数的准确测量。
同时,我们将实验验证所提出方法的有效性,并对实验结果进行评估和分析。
本文的创新点在于采用了一种全新的生成亚像素光条提取并生成点集的方法,能够提高重建和测量的准确性和稳定性。
我们认为,本研究的成果将为相关领域的研究和应用提供有益的参考,并为未来的研究工作提供新的思路和方向。
"在编写文章的其他部分时,请注意按照大纲的结构逐步展开,提供详细的介绍、分析和实验验证。
同时,也可根据具体情况自行调整和完善文章的内容。
1.2文章结构文章结构部分的内容如下:文章结构部分旨在介绍本文的整体结构和各个章节的内容安排。
本文分为引言、正文和结论三个部分。
在引言部分,首先对整篇文章进行概述,简要介绍文章研究的背景和意义。
接着对文章的结构进行概括性描述,说明各章节的内容安排和逻辑顺序。
Panelization训练知识讲座

/genesis/sys/hooks/film_sizes , 可依需求 來設定 6. 先選擇所有的層別,再執行 force on next run 7. 設定 Run film optimization, 並輸入預輸出的 層別名稱等. 8. 切回Graphic Editor的step : plotter, 查看 資料內容是否正確. 9. 使用output, 將層別輸出到繪圖機.
用途 : 當接收輸入客戶的原稿資料, 其資料內容是打散的整個pcb, 利用sub-panel將此step 中的相同 區塊的資料擷取出來成為另外的一個one-up的step, 此時若資料有所異動, 只須更改單一piece 的資料就可.
1P1anelization
兩個相同的step
One-up 由one-up 的step所排出的排版
3P2anelization
Step 依照有效區域的向左, 向右邊靠齊 Step 依照有效區域的向上, 向下邊靠齊 Step 依照有效區域的向y軸水平靠齊
Step 依照有效區域的向x軸重直靠齊
3P3anelization
選擇單一片排版 用方形框出多個pcb排版 用不規則封閉區間框出多個pcb排版 訊息欄視窗 ( 選擇功能時會顯示在此區塊上)
1P2anelization
先定義虛擬 pcb的邊框 準備擷取one-up step 參考層別
1P3anelization
設定虛擬pcb的基準點
picodet结构

Picodet结构
Picodet结构是Picodet论文中介绍的一种神经网络结构,该论文由百度发表。
在移动端性能优秀的实时目标检测网络PP-PicoDet中,引入了SE模块和Ghost模块,同时运用了神经网络搜索(NAS)技术,得到了ESNet(Enhanced ShuffleNet)作为骨干网络。
Picodet结构在ShuffleNetV2的基础上进行了改进,引入了SE模块和Ghost 模块。
SE模块可以对通道的权重进行调整,而Ghost模块则通过增加额外的卷积路径来增强特征提取能力。
此外,PP-PicoDet还使用了更精准的SimOTA采样策略,随训练过程动态变换标签分配方式,并用VFL+GloU替代CELoss+IoU(损失函数)。
在激活函数上用H-Swish替代Relu,使用cosine学习率衰减策略。
PP-PicoDet在采样上采用了SimOTA采样策略,这是一个更精准的采样策略。
训练过程中会动态变换标签分配方式。
此外,PP-PicoDet还使用了
VFL+GloU替代CELoss+IoU作为损失函数。
在激活函数上,PP-PicoDet使用了H-Swish替代Relu。
整体网络结构中,backbone是ES block的堆叠,Neck部分是CSP-PAN。
CSP-PAN首先进行上采样,然后使用FPN进行特征层上采样。
接着,使用CSP 结构进行通道切分后操作,最后再合并。
PAN自底向上进行DP(dw和pw)操作。
最后将CSP-PAN的输出作为Head的输入,PicoFeat结构(两个dw-pw卷积)接在每个CSP-PAN层后面。
13、zeta变换器小信号建模
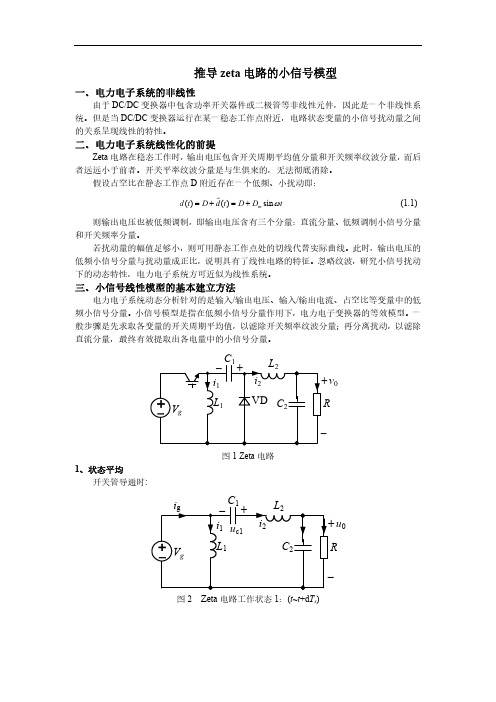
d (t) D d(t) D Dm sint
(1.1)
则输出电压也被低频调制,即输出电压含有三个分量:直流分量、低频调制小信号分量 和开关频率分量。
若扰动量的幅值足够小,则可用静态工作点处的切线代替实际曲线。此时,输出电压的 低频小信号分量与扰动量成正比,说明具有了线性电路的特征。忽略纹波,研究小信号扰动 下的动态特性,电力电子系统方可近似为线性系统。
dˆ(Vg
Uc1)
C1
duˆc1 dt
( I1
I2 )dˆ
Diˆ2
D'iˆ1
L2
diˆ2 dt
D(Vˆg
uˆc1) dˆ(Vg
Uc1) uˆo
C2
duˆo dt
iˆ2
uˆo R
(1.10)
iˆg D iˆ1 iˆ2 dˆ(I1 I2 )
(1.7)
d D d(t)
(1.8)
Vg (t) TS Vg vg (t)
(1.9)
将(1.4)~(1.9)代入大信号模型,直流项为零,忽略非线性的二阶交流项,保留线性 的一阶交流项得到 Zeta 电路的线性化小信号交流模型(线性化):
L1
diˆ1 dt
DVˆg
D'uˆc1
三、小信号线性模型的基本建立方法
电力电子系统动态分析针对的是输入/输出电压、输入/输出电流、占空比等变量中的低 频小信号分量。小信号模型是指在低频小信号分量作用下,电力电子变换器的等效模型。一 般步骤是先求取各变量的开关周期平均值,以滤除开关频率纹波分量;再分离扰动,以滤除 直流分量,最终有效提取出各电量中的小信号分量。
半监督学习中的自训练方法详解(Ⅰ)

半监督学习中的自训练方法详解在机器学习领域,半监督学习是一种重要的学习范式,它利用大量的无标签数据来提高模型的性能。
在半监督学习中,自训练(self-training)方法是一种常见的技术,它通过将模型预测的标签作为伪标签来训练模型,从而利用无标签数据进行学习。
本文将详细介绍自训练方法在半监督学习中的应用。
自训练方法的基本原理是利用模型对无标签数据进行预测,并将预测的标签作为真实标签进行训练。
具体来说,自训练方法首先使用有标签数据对模型进行初始化训练,然后利用模型对无标签数据进行预测,将预测标签置信度较高的样本作为伪标签,将这些伪标签与有标签数据合并,重新训练模型。
这个过程迭代进行,直到收敛为止。
在实际应用中,自训练方法需要解决一些关键问题。
首先是伪标签的可靠性和准确性。
因为伪标签是模型预测的结果,其准确性不如有标签数据。
因此,自训练方法需要设计一些策略来筛选和修正伪标签,以减少错误标注对模型训练的影响。
其次是训练样本的平衡性。
在自训练过程中,模型可能会产生偏向某些类别的情况,导致模型性能下降。
因此,需要设计合适的样本选择策略来保持训练样本的平衡性。
最后是训练过程的收敛性。
自训练方法的迭代训练过程需要一些调控策略来保证模型收敛。
针对上述问题,研究者们提出了许多改进自训练方法的技术。
其中,伪标签的可靠性可以通过置信度阈值来筛选高置信度的伪标签,通过集成学习方法来修正伪标签。
训练样本的平衡性可以通过引入样本选择策略,比如在每轮训练中保持不同类别的样本比例。
训练过程的收敛性可以通过引入早停策略,比如监控验证集的性能,当性能不再提升时停止训练。
除了上述改进技术,自训练方法还可以与其他半监督学习方法结合,以提高模型性能。
比如,自训练方法可以与生成对抗网络(GAN)结合,利用生成对抗网络生成的数据来增强模型的泛化能力。
自训练方法还可以与图卷积网络(GCN)结合,利用图结构信息来进行自训练。
在实际应用中,自训练方法已经取得了许多成功的应用。
trainingarguments参数

trainingarguments参数Trainingarguments参数是深度学习中非常重要的一个概念,它决定了模型的训练过程中的许多细节。
本文将从基础概念出发,系统地介绍trainingarguments参数的含义和作用。
一、trainingarguments参数的定义Trainingarguments参数是在深度学习中用于控制模型的训练过程的一组参数,其包括许多不同的参数值,例如batch size、learning rate、momentum等。
二、trainingarguments参数的作用1. Batch sizeBatch size指的是每次迭代训练中用到的样本数,它决定了每个参数更新的方式和速度。
如果batch size设置过小会导致在滑动平均的过程中产生的噪声较大,训练的效果会比较差。
而batch size设置过大则会占用较多的内存,有可能导致无法运行。
因此,需要根据实际情况选择合适的batch size。
2. Learning rateLearning rate是控制模型训练速度的一个超参数。
它定量地表达了每次迭代中调整模型参数的数量级。
在训练早期,如果learning rate过大,会导致模型梯度爆炸的问题,模型稳定性较差。
而在训练后期,如果learning rate过小,模型则会很难收敛。
所以需要合适的learning rate才能对模型训练起到很好的作用。
3. MomentumMomentum指的是模型中梯度下降的加速度,它会考虑之前梯度的信息来更新当前的参数。
Momentum参数的调整可以加速模型的收敛,起到优化的作用。
但如果Momentum参数过大,则可能会导致模型震荡。
因此,需要权衡各个参数的取值来获得最佳的训练效果。
三、trainingarguments参数的调整trainingarguments参数的调整是深度学习中优化模型的重要手段,而如何调整这些参数也是一个需认真处理的问题。
zetane使用方法

Zetane是法国Dassault Systemes公司开发的一款产品,用于数据可视化、分析、决策支持等。
它可以通过加载模型,显示神经网络中的任何一层,并可以放大查看每层的特征图。
使用Zetane的具体步骤可能包括:
1. 安装Zetane软件并打开。
2. 加载您要查看的模型。
3. 选择您想要查看的层并放大查看其特征图。
4. 您可以通过点击工具栏中的按钮,查看不同形式的特征图,例如3D视图、平面图、标注卷积结果的平面图等。
5. 在查看过程中,您可以通过保存或导出结果,以便于后续的分析和决策。
请注意,这些步骤可能根据不同的版本或使用环境有所不同,建议参考Zetane的官方文档或咨询相关专家获取具体的使用步骤和操作细节。
人工智能训练师考核模块需求说明

人工智能训练师考核模块需求说明
15、开发语言:Python、C/C++;
16、超声波测距传感器:接口:≥2个,具有语音播报功能
“识别到前超声波”、“识别到后超声波”;
17 开关接口:不少于1路启动开关、不少于1路紧急停止
按钮;
18.人工智能车类型:阿克曼结构(前轮转向,后轮驱动);
19.人工智能车尺寸要求:长度≥400mm;宽度≥260mm,高
度≥190mm;
20.最小转弯直径:≤1100mm(人工智能车转一周,测量小车
两外侧之间的距离,如下图所示);
21.车轮数量:4个;
22.轴距≥140mm, 轮距≥230mm (轴距是指前轴中心到后轴中心的距离,轮距是左右两车轮两个中心平面之间的距离);
23.舵机数量:不少于1个;
24:开盖形式:为了方便学生对硬件设备进行装调实验,要求小车采用翻盖设计,方便操作,铰链开合,开合角度≥160度;
25.遥控形式:支持PS2无线手柄控制,通过遥杆对速度无级调节;
4、人工智能训练沙盘车道按照下图轨道线定制。
5、人工智能训练沙盘提供14类交通标志、可变交通灯等,道路表面交通标志、标线符合交通线路设计规范,如斑马线、转弯线等,用于验证和应用智能避障、路径规划等人工智能算法。
6、人工智能监测终端:
1)分辨率3840*2160;
2)终端显示尺寸:长度≥2200mm,宽度≥1250mm;
3)CPU:CortexA73 四核;
4)内存:4GB;
5)GPU:GMCI;
6)存储:64G;
7)WiFi6;
8)蓝牙5.2;
9)HDMI:3个;
10)USB:2个;
11)以太网:1个;。
ZETA微步驱动系列说明书

Compumotor’s ZETA Microstepping Drive FamilyThese microstepping drives are stand-alone, packaged microstepping drives that incorporate breakthrough techniques know as Active Damping TM (patented) and ElectronicViscosity TM (patent pending).The ZETA family of drives come in 4 different power versions: ZETA4, ZETA4-240, ZETA8 and ZETA12.Designed for reliability, the ZETA drive family offers premier quality and performance while being easy to use and apply. The ZETA drive family meets the need for global solutions:•CE (LVD), CE(LVD and EMC) or low-noise applications •UL Recognized•120VAC and 240VAC versionsThe ZETA4, ZETA8, and ZETA12 operate at 120VAC and provide 4A, 8A, and 12A respectively.The ZETA4-240, ZETA8, and ZETA12 comply with the Low Voltage [LVD (EN61010)] and Electromagnetic Compatibility [EMC (CISPR22/EN55022 Class B)] directives making it an excellent choice for machines built in or shipped to the European community. By designing the drive to meet the EMC Class B’s rigid standards, the ZETA4-240, ZETA8, and ZETA12 also meets North America’s FCC Class B emissions test making it the solution for low-noise applications. The ZETA4-240, ZETA8, and ZETA12 have also received UL approval.The ZETA4-240 can be used for low- and high-power applications. For low-power applications, the ZETA 4-240 operates at 120VAC to provide the same performance as the ZETA4. For high-power applications, the ZETA4-240 runs off 240VAC to provide the same performance of an 8 AMP drive operating at 120 VAC.FeaturesPerformance•Standard step-and-direction input or CW/CCW input •Torque from 43 oz-in (0.30 N-m) to 3480 oz-in(24.4 N-m)Performance (continued)•Active Damping TM benefits:– Damping ratios of up to 0.5– Higher acceleration than conventional step systems– Decrease motor vibration– Increase shaft power– Higher performance•Electronic Viscosity TM benefits:– Reduce settling time– Increase slow speed smoothness (reduce velocityripple)– Reduce audible noiseProtection Circuit•Motor short circuits (phase-to-phase and phase-to-ground)•Overtemperature•Undervoltage•Power dump (dissipates excess energy caused by load regeneration)Physical•A wide selection of motors is available for both 120 VAC and 240 VAC operation•Drive status indicators: power, step input, over temperature and motor fault•120VAC (170VDC bus voltage) for ZETA4, ZETA4-240, ZETA8, and ZETA12•240VAC (340VDC bus voltage) for ZETA4-240•Removable connectors for easy installation•Selectable damping for optimized performance•Optional EMC drive kit and EMC Cable kit consisting of AC mains filter and cabling to allow complete EMC or low noise system compliance for ZETA4-240, ZETA8, and ZETA 12.BFeaturesPerformance•One axis package drive/controller •Active Damping TM benefits:– Damping ratios of up to 0.5– Higher acceleration than conventional step systems – Decrease motor vibration – Increase shaft power – Higher performance•Electronic Viscosity TM benefits:– Reduce settling time– Increase slower speed smoothness (reduce velocityripple)– Reduce audible noiseProtection Circuit•Motor short circuits (phase-to-phase and phase-to-ground)•Overtemperature of internal drives and power supply •Overvoltage (protects against overvoltage fromregeneration)•Power dump (dissipates excess voltage caused by load regeneration)I/O•Encoder channel configurable as hardware up/downcounter•Incremental encoder input•Home and end-of-travel limit inputsPackagedDrive/Controller SystemsCompumotor’s ZETA6000 Series products are stand-alone,single-axis drive/controller systems. The ZETA6000 Series products come in 4 different power versions: ZETA6104,ZETA6104-240, ZETA6108 and ZETA6112. These ZETA6000products pack all the power and reliability of the 6000 family of controllers and ZETA drives into one convenient package. All of the I/O points, RS-232C/RS485 control, operator interface options, and following capabilities for single-axis applications are included. The following package can perform phase shifts,electronic gearbox, and flying cutoff functionality with ease.The ZETA6000 Series package was made for easy and reliable installation. The connections are on removable screw terminals and a standard 50-pin header allowing simple installation and cable routing without having to cut off and reattach a connector.The ZETA6000 Series is designed to solve single-axis applications cleanly, completely, and for a low cost. Formultiple-axis applications, up to 99 ZETA6000 Series can be daisy chained (32 ZETA6000 Series can be multi-dropped using RS-485) to work together.In order to speed your application development, theZETA6000 Series comes standard with Motion Architect TM , a Microsoft ® Windows TM -based development package. Motion Architect TM contains many tools which allow you to easily create and implement motion programs. The ZETA6000 Series is also compatible with the DDE6000 Server software package.The ZETA6000 Series uses the 6000 Series command language. This popular language is powerful enough to implement complex motion control applications and simple enough to not overwhelm the novice programmer. The ZETA6000 Series is your single-axis solution.B•Two fast (trigger) inputs for position capture, registration,etc.•16 programmable inputs (Opto-22 compatible)•8 programmable outputs (Opto-22 compatible)•One auxiliary programmable outputLanguage•150,000 bytes of non-volatile memory for storing programs and paths•Interrupts program execution on error conditions•Encoder and motor position capture (using the trigger inputs)•Registration (using the trigger inputs)•Selectable damping (programmable) to optimize performance for changing loads•Variable storage, conditional branching and math capability •Program debug tools – single-step and trace modes,breakpoints, error messages and simulation of I/O Software Provided•Motion Architect TM , Microsoft ® Windows TM -based applica-tion development software•Dynamic Link Library (DLL) provided for use withMicrosoft ® Windows TM and Microsoft ® Windows TM NT software development kitsFeatures (continued)Optional Software•Dynamic Data Exchange (DDE) server available allowing data exchange between different Windows TM software applicationsInterface Capabilities•Direct interface to RP240 Remote Operator Panel•Operates stand-alone or interfaces to PCs, PLCs, and thumbwheels•One RS-232C communication port •One RS232C/485 configurable portPhysical•Stand-alone drive/controller package•Status/fault LEDs to confirm proper operation (four diagnostic LEDs)•Removable connectors for easy installation •120VAC (170VDC bus voltage) for ZETA6104,ZETA6104-240, ZETA6108, ZETA6112•240VAC (340VDC bus voltage) for ZETA6104-240BSpeed-Torque Curves (@120VAC)ZETA with VS Motors0.14.07.21.28.35.420.28.14.42.56.70.840.35.701.051.261.75OS2HB/ZETA4Speed (RPS)T o r q u e (o z -i n )Torque (Nm)OS21B/ZETA4Speed (RPS)T o r q u e (o z -i n )Torque (Nm)OS22B/ZETA4Speed (RPS)T o r q u e (o z -i n )Torque (Nm)SERIES P ARALLEL FULL102030405001020304050600102030405002040608010012001020304050050100150200250VS13B/ZETA4VS21B/ZETA4Torque (Nm)T o r q u e (o z -i n )Torque (Nm)T o r q u e (o z -i n )VS12B/ZETA4T o r q u e (o z -i n )ZETA with OS MotorsParallel connected motors are limited to 50% duty cycle when operated above 5 rps. For greater than 50% duty cycle above 5 rps,connection must be made to the motor in series. Fan cooling the motor will increase duty cycles above 5 rps.Viscous damper is not required to achieve speed-torque curves.Note: ±10% torque variance due to motor tolerance0.14.28.42.56.7010203040500501001502000.35.701.051.4010203040500501001502002500.35.701.051.401.750.35.701.051.401.7510203040501002003004005000.701.402.102.803.500.701.402.102.803.504.20ES21B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)ES22B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)ES23B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)ES31B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)ES32B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)ES33B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)SERIES PARALLEL FULL1020304050100200300400500600102030405002040608010001020304050050100150200250Speed-RPS03502.48010********Speed-RPS05003.551020304050Speed-RPS07004.9701020304050RS32C/ZETA4-240RS31C/ZETA4-240RS33C/ZETA4-240400 2.84300 2.13200 1.421000.71280 1.99210 1.491400.99700.48560 3.98420 2.98280 1.991400.99T o r q u e (o z -i n )Torque (Nm)T o r q u e (o z -i n )Torque (Nm)T o r q u e (o z -i n )Torque (Nm)PARALLEL SERIESRE42C/ZETA4-240RS42C/ZETA4-240RS43C/ZETA4-240Speed-RPS 0T o r q u e (o z -i n )Torque (Nm)T o r q u e (o z -i n )Torque (Nm)T o r q u e (o z -i n )Torque (Nm)14001020304050Speed-RPS00200014.2040Speed-RPS180001020304050160011.412008.52800 5.68400 2.843224168112084056028009.947.955.961.771.9911401080720360012.88.097.675.112.56PARALLEL SERIESZETA with RS MotorsZETA with ES Motors102030405001002003004005006007008000.701.42.12.83.54.24.95.60102030405002004006008001000120001.42.84.25.67.08.401020304050050010001500200003.57.010.514.103.57.010.514.110203040500500100015002000102030405050010001500200025003000350003.57.010.514.117.521.224.5010203040501000200030004000500007.014.121.228.235.3TS31B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)TS32B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)TS33B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)TS41B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)TS42B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)TS43B/ZETASpeed (RPS)T o r q u e (o z -i n )Torque (Nm)SERIES PARALLEL FULLZETA with TS MotorsAll motors: Cable length = 10 feet (3 m); attached connector is prewired for series current.BB*EMC is a system compliance. To comply with EMC and low-noise (C15PR22/EN55022 Class B or FCC Class B emissions) standards, the following items are required:•ZETA4-240, ZETA8, or ZETA12 Drive•ZETA EMC KIT•C10 motor accessory (LVD/EMC cable kit)•CE(LVD) motor for LVD. Compumotor recommends a terminal board (NPS) motor construction for easier EMC installation**Values shown in speed-torque curvesFlat Configuration = F #303 Woodruff Key Configuration = WDouble Shaft Configuration EC EncoderConfigurationSize 42 Frame, R SeriesDimensions in inches (mm)Size 34 Frame, R SeriesDimensions in inches (mm)Model Lmax L2RS31–NPS 3.62(91.95) 2.87 (72.9)RS32–NPS 4.77(121.16) 4.02(102.11)RS33s –sss NPS 6.05(153.67) 5.30(134.62)Model Lmax L2A B CRS42–NPS 8.04(204.22)7.29(185.17)0.625(15.87) 2.19(55.63)0.705(17.91)RE42–NPS 8.04(204.22)7.29(185.17)0.625(15.87) 2.19(55.63)0.705(17.91)RS43C–NPS 10.56(268.23)9.81(249.18)0.75(19.05) 2.19(55.63)0.83(21.09)Double Shaft Configuration EC EncoderConfigurationon 1.06Model AOS2HA (OEM57-40) 1.60(40.6)OS21A (OEM57-51) 2.06(52.3)OS22A (OEM57-83) 3.10(87.7)Detail View 0.187(17.91)B237Parker Hannifin CorporationSize 34 Frame, T SeriesDimensions in inches (mm)Size 42 Frame, T SeriesDimensions in inches (mm)Model Lmax L2A B CTS31B-K NPS 4.44(112.78) 3.70(93.98)0.5000(12.70).555 (14.097).1250(3.175)TS32B-K NPS 5.96(151.38) 5.22(132.59)0.5000(12.70).555(14.097).1250(3.175)TS33B–s K s NPS 7.48(189.99) 6.74(171.20)0.6250(15.88).705 (17.907).1875(4.763)Model Lmax L2TS41B-K NPS 5.20(132.08) 4.46(113.28)TS42B-K NPS 7.22(183.39) 6.48(164.59)4x ∆ .328 (8.331) thruZETA4-240, ZETA8, ZETA12 Dimensions Dimensions in inches (mm)ZETA Dimensional Drawings(25.4)0.500(12.7)for #6 screws)(25.4)3x 0.18 (4.6)(clearance for #8 (M4)ZETA6104 Dimensions Dimensions in inches (mm)0.965(24.5)3x Ø) ((25.4)3x 0.156 (3.96)ZETA6104-240, ZETA6108, ZETA6112Dimensions in inches (mm)ZETA4 Dimensions Dimensions in inches (mm)BZETAConnectionsZETA6000 Series Connection Pin-Out List(ZETA6104, ZETA6104-240, ZETA6108 & ZETA6112)ZETA Drives Connection(ZETA4, ZETA4-240, ZETA8 & ZETA12)Step+Step –Direction+Direction –Shutdown+Shutdown –Fault E Fault C Reset –Reset+Internal ConnectionsTo comply with EMC and low-noise (CISPR 22/EN55022Class B or FCC Class B emissions) standards, the followingitems are required:•ZETA4-240, ZETA8, or ZETA12 drive•CE(LVD) motor for LVD. Compumotor recommends aterminal board (NPS) motor construction for easier EMCinstallation•C10 (C10H) motor accessory (LVD/EMC cable kit)•ZETA EMC KIT* C10H is a high-power verson of the C10 cable kit. IT should be used with motors operating above 10 amps ofcurrent (TS33, TS41, TS42, or TS43 in parallel)Motor Ordering Information RE=1000 ppr differential kitencoder w/ line driver & 13"braided shield cable (w/ FLY only)Encoder OptionRC=1000 ppr differential kitencoder w/ line driver & 10’ cableBlank=No feedback (no dashrequired)HJ=512 ppr single-ended kitencoder w/12" flying leads (onlyavailable on A winding motors)FLY=Regular con-struction with flying(8) leads, 12"Motor Construction/Hookup L10= Regular con-struction with 10’ LVD cable N=Standard smooth F=Flat (.02" depth)(0.5" length)Shaft Modification H=Half stacks 1=1 stack 2=2 stacks No. of Rotor Stacks S=Single D=Double (Double shaft req d for all motors with encoders)Shaft A=75VDC winding (Gray painting motors)B=170VDC winding (Black painted motors)Winding Type 2=Size 23Frame Size S=Standard Type O (Octagonal)Series O Series (CE(LVD), UL Pending)The O Series Size 23 Frame motors with A Winding (75VDC) are designed for use with the OEM750 Series, OEM230/330/530Series, and the SD Series. The O Series Size 23 Frame motors with B Winding (170VDC) are designed for use with ZETA Series,ZETSA-240 Series (@120VAC), S Series, PD Series.R Series (CE (EMC)*, CE(LVD), UL Recognized)The R Series Size 34 and Size 42 Frame motors are available in a C Winding (340VDC). Motors with the C Winding are recom-mended for use with the ZETA240 Series (@240VAC).T Series (CE (EMC)*, CE (LVD), UL Recognized)The T Series Size 34 and Size 42 Frame motors are available in a B Winding (170VDC). These motors are designed for use with the ZETA Series, ZETA-240 (@120VAC), PD Series, S Series.O Series Part Number Example:OS2 _ _ - _ _ ____ - ___OS2HA-SNFLY OS22B-DNL10-RC R Series Part Number Example:R _ _ _ _ - _ _ ______ - ____RS32-SNS10RE42C-SKNPSRS42-DKS10-ECT Series Part Number Example:TS _ _ B - _ K _ ______ - _____TS31B-SKNPSTS43B-DKS10Encoder OptionEC=1000 ppr differentialencoder with line driverand 10-ft cable (-E Series)Blank=No feedback(No Dash Required)NPS=End bell/terminal board via 1/2" NPS Pipethread, no cable S10=CE (LVD)/UL, 10’ cable option for NPS construction,wired @ motor in SeriesP10=CE (LVD)/UL, 10’ cableoption for NPS construction,wired @ motor in Parallel.Motor Construction/Hookup K=Straight Key (Standard on all T Series Motors)Shaft Modification 1=1 stack 2=2 stacks 3=3 stacks No. of Rotor Stacks S=Single D=Double (Doubleshaft req ’d for all motors w/encoders)Shaft B=170VDC winding (Black painted motors)Winding Type 3=Size 344=Size 42Frame Size S=Standard Type T (Torque)Series * For CE(EMC) compliance, refer to the ZETA Installation GuideEncoder OptionEC=1000 ppr differentialencoder with line driverand 10’ cable (-E Series)Blank=No feedback(No Dash Required)Motor Construction/Hookup N=None (34 Frame only)K=Straight Key (Standard on 42Frame)F=Flat(34 Frame only,0.02" depth,0.5" length)Shaft Modification 1=1 stack (34 Frame Only)2=2 stacks 3=3 stacks No. of Rotor Stacks S=Single D=Double (Double shaft req ’d for all motors w/encoders)Shaft C=340VDC winding (Yellow painted motors)Winding Type 3=Size 344=Size 42Frame Size S=Standard E=Enhanced (RE 42 only)Type R (Round)Series NPS=End bell/terminal board via 1/2" NPS Pipethread P10=CE (LVD)/UL, 10’ cable option for NPS construction,wired @ motor in Parallel.S10=CE (LVD)/UL, 10’ cableoption for NPS construction,wired @ motor in Series.Motor Ordering Information, continuedV Series (UL Recognized)E Series (also known as ZETA Series)The E Series Size 23 and Size 34 Frame motors are available in a B Winding (170VDC). These motors are designed for use with Gemini GT -L5,Gemini GT -L8, the ZETA Series, ZETA4-240 (@120VAC), PD Series, S Series.E Series Part Number ExampleES _ _ B - _ K _ ______ - _____ES31B-SKNPSES43B-DKS10N=None (Standard)F=Flat (.02" depth)(0.5" length)K=Straight Key(34 Frame Only )Encoder Option EC=1000 ppr differential lineencoder w/ 10’ cableBlank=No feedback (no dash required)Motor Construction/Hookup R10=Regular hookup w/ 10’ Flying Leads1= 1 stack 2= 2 stacks 3= 3 stacks No. of Rotor Stacks S=Single D=Double Doubleshaft req d for all motors w/encoders Shaft B=170VDC winding (Black painted motors)Winding Type 2=Size 23 (2.5")3=Size 34 (3.38")Frame Size S=Standard Type E (Extra Smooth)Series ShaftModification V Series Part Number ExampleVS _ _ B - _ K _ _ _ - _____VS13B-DFRIOThe V Series Size 17, Size 23 and Size 34 Frame motors are available in a B Winding (170VDC). These motors are designed for use with the E-AC drive, the Gemini GT -L5, the Gemini GT -L8, the ZETA Series, the ZETA4-240 (@120VAC), the PD Series and the S Series.。
zetane使用方法 -回复

zetane使用方法-回复标题:详解Zetane使用方法:一步一步解读Zetane的操作流程和技巧导言:Zetane是一种功能强大的软件,它致力于提供高效、精确和自动化的数据分析解决方案。
本文将介绍Zetane的基本操作流程和一些技巧,以帮助用户更好地利用这款软件完成数据分析任务。
一、Zetane简介1.1 什么是Zetane?Zetane是一种数据分析工具,它能够帮助用户处理和分析大规模数据集。
它的主要功能包括数据清洗、特征选择、模型构建和模型评估等。
1.2 Zetane的优势- 自动化:Zetane能够快速而自动地完成一系列数据分析任务,大大减少了人工处理的工作量。
- 精确性:借助于强大的算法和模型,Zetane能够提供准确和可靠的数据分析结果。
- 可扩展性:Zetane可以处理大规模数据集,并能够适应不同的数据分析需求。
二、安装和启动Zetane2.1 下载和安装Zetane用户可以从官方网站或其他可靠渠道下载Zetane的安装文件,并按照提示完成安装过程。
2.2 启动Zetane双击打开Zetane的应用程序图标,在其主界面上选择“新建项目”或打开现有项目。
三、Zetane的基本操作流程3.1 导入数据在Zetane的主界面中,选择“导入数据”功能,然后浏览并选择需要导入的数据文件。
Zetane支持多种数据格式,如CSV、Excel等。
3.2 数据清洗和预处理在导入数据后,可以使用Zetane提供的数据处理工具进行数据清洗和预处理,以去除异常值、填补缺失数据等。
3.3 特征选择特征选择是数据分析的重要步骤之一。
Zetane提供了多种特征选择算法和模型,用户可以根据需要选择合适的方法,并对数据集进行特征选择。
3.4 模型构建和训练选择“模型构建”功能后,Zetane将展示一系列可供选择的模型和算法。
用户可以根据具体需求选择合适的模型,并进行训练和调优。
3.5 模型评估训练完成后,Zetane可以通过分析模型的性能指标来评估其表现。
training view 用法

training view 用法"Training view"这个词组在不同的上下文中可能有不同的含义。
以下是一些可能的用法:1、数据科学和机器学习中的训练视图:在数据科学和机器学习中,"training view"通常指的是用于训练模型的数据子集或特定视图。
这可以帮助研究人员或开发者专注于训练数据的一部分,例如,只查看特定特征、筛选出特定样本或者对数据进行预处理后的版本。
用法示例:pythonimport pandas as pd//假设我们有一个完整的数据集dfdf = pd.read_csv('dataset.csv')//创建一个训练视图,只包含部分特征和过滤后的样本training_view = df[['feature1', 'feature2', target']].loc[df['sample_condition'] == True]2、软件开发中的训练视图:在软件开发中,"training view"可能是指一种用户界面或报告,用于展示与培训或学习相关的信息。
例如,一个在线教育平台可能有一个"training view",显示课程进度、学习资源和评估结果。
用法示例(假设使用HTML和JavaScript):html<div id="trainingView"><h1>Training View</h1><p>Course Progress: <span id="courseProgress"></span></p><ul id="learningResources"></ul><div id="assessmentResults"></div></div><script>// 使用JavaScript获取和更新培训视图的内容function updateTrainingView() {document.getElementById('courseProgress').textContent = getCourseProgress();document.getElementById('learningResources').innerHTML = generateResourceList();document.getElementById('assessmentResults').innerHTML = displayAssessmentResults(); }// 示例函数,实际代码会根据具体需求实现function getCourseProgress() {return '50%';}function generateResourceList() {return '<li>Resource 1</li><li>Resource 2</li>';}function displayAssessmentResults() {return '<p>Assessment Result: Pass</p>';}updateTrainingView();</script>请根据你的具体需求和上下文来确定"training view"的正确用法。
3.携程搬砖第三节ai训练方法

携程搬砖第三节本人训练方法一、本人训练方法的概念本人(Artificial Intelligence,人工智能)训练方法是指通过数据和算法对人工智能模型进行优化和调整的过程。
在人工智能领域,训练方法是至关重要的,它直接影响着人工智能模型的性能和效果。
携程搬砖第三节本人训练方法作为一种全新的训练方法,受到了广泛关注和讨论。
本文将对携程搬砖第三节本人训练方法进行全面评估,并探讨其在人工智能领域的应用前景。
二、携程搬砖第三节本人训练方法的原理和特点1. 原理:携程搬砖第三节本人训练方法是一种基于大数据和深度学习的新型训练方法。
它通过大规模的数据集和复杂的神经网络模型,实现对人工智能算法的高效训练和优化。
与传统的本人训练方法相比,携程搬砖第三节本人训练方法具有更高的准确性和泛化能力,能够更好地适应各种复杂环境和任务。
2. 特点:携程搬砖第三节本人训练方法的特点主要体现在以下几个方面:(1)大规模数据:携程搬砖第三节本人训练方法依托于大规模的数据集,能够更充分地学习和理解数据中的模式和规律,从而提高人工智能模型的性能。
(2)深度学习:携程搬砖第三节本人训练方法采用了深度学习算法,可以自动地从数据中学习特征和表示,避免了人工特征提取的繁琐和耗时过程。
(3)高效优化:携程搬砖第三节本人训练方法通过优化算法,能够快速地调整模型参数,提高人工智能模型的训练速度和效率。
三、携程搬砖第三节本人训练方法在人工智能领域的应用前景携程搬砖第三节本人训练方法作为一种新型的训练方法,具有广阔的应用前景。
在图像识别、自然语言处理、智能推荐等领域,携程搬砖第三节本人训练方法都能够发挥重要作用,提高人工智能模型的性能和效果。
特别是在自动驾驶、医疗诊断、智能家居等领域,携程搬砖第三节本人训练方法更是具有巨大的潜力,有望助力人工智能技术的快速发展和应用。
四、携程搬砖第三节本人训练方法的个人观点和理解从我的个人观点来看,携程搬砖第三节本人训练方法无疑是人工智能领域的一次重大突破。
代码理解nnunet trainer过程

代码理解nnunet trainer过程本文将详细介绍nnunet训练器(trainer)的代码理解过程。
nnunet是一个用于医学图像分割的深度学习框架,trainer是其训练过程的核心组件。
我们将从整体架构、数据准备、网络模型、损失函数、优化器以及训练循环等方面进行讲解。
1. 整体架构nnunet的trainer代码位于nnunet/training/network_training/目录下。
主要包含以下文件:•training.py: 训练器的入口文件,定义了训练过程的主要流程。
•network_training.py: 定义了训练器类NetworkTrainer,负责具体的训练任务。
•loss_functions.py: 实现了各种常用的损失函数。
•optimizers.py: 实现了各种优化器。
•evaluation.py: 实现了各种评估指标。
•aggregates.py: 实现了各种聚合函数。
2. 数据准备在训练之前,首先需要准备好训练数据和验证数据。
nnunet使用了自定义的数据集类Dataset,继承自torch.utils.data.Dataset。
数据集类的实现可以在nnunet/dataset/目录下找到。
在数据集类中,需要实现__len__和__getitem__方法,分别返回数据集的大小和指定索引的数据。
此外,还可以根据需要添加其他方法,如数据增强、数据预处理等。
在训练器中,通过DataManager类加载数据集。
DataManager会根据配置文件中的设置将数据集分成训练集和验证集,并进行数据增强和预处理。
3. 网络模型nnunet支持多种网络模型,如UNet、VNet、HighResNet等。
这些模型的定义可以在nnunet/network/目录下找到。
在训练器中,通过get_network函数选择需要使用的网络模型。
该函数会根据配置文件中的设置返回相应的网络模型实例。
controlnet训练流程
ControlNet训练流程ControlNet是一种用于目标检测和图像分割的深度学习网络模型。
它具有高效的性能和准确的识别能力,因此在计算机视觉领域得到了广泛的应用。
对于想要了解ControlNet训练流程的人士来说,本文将为您详细介绍ControlNet的训练流程,希望对您有所帮助。
一、数据准备在进行ControlNet的训练之前,首先需要对训练数据进行准备。
训练数据包括输入图像和对应的标签,标签可以是目标的位置、类别、边界框等信息。
通常来说,数据准备的过程包括数据采集、数据清洗、数据标注等步骤。
需要注意的是,训练数据的质量和数量直接影响着训练模型的效果,因此在这一步需要花费较多的时间和精力。
二、模型选择在数据准备完成后,接下来需要选择合适的模型来进行训练。
ControlNet是一个已经训练好的深度学习网络模型,其基于ResNet 和FPN构建而成,具有较好的性能和通用性。
通常情况下我们会选择使用ControlNet作为训练模型。
不过,如果需要对ControlNet进行改进或者扩展,也可以选择其他的网络模型作为基础,在此基础上进行修改和优化。
三、模型初始化模型初始化是指在开始训练之前对模型的参数进行初始化。
通常情况下,我们可以选择使用预训练的模型参数作为初始化参数,这样可以加速模型的收敛速度并提高训练效果。
当然,如果对模型有特定的要求,也可以选择随机初始化参数来进行训练。
四、损失函数选择在训练过程中,我们需要选择合适的损失函数来衡量模型预测结果与真实标签之间的差异。
对于目标检测和图像分割任务来说,常用的损失函数包括交叉熵损失函数、均方差损失函数、IoU损失函数等。
在选择损失函数时,需要根据实际任务的需求和模型的特点来进行权衡和选择。
五、训练参数设置在进行模型训练之前,还需要对训练参数进行设置。
训练参数包括学习率、优化器、批大小、训练迭代次数等。
学习率决定了模型参数更新的速度,优化器决定了参数更新的方式,批大小决定了每次更新模型参数的样本数量,训练迭代次数决定了整个训练过程的时长。
半监督学习中的自训练方法详解(十)

半监督学习中的自训练方法详解半监督学习是一种机器学习方法,它利用有标签和无标签的数据来进行模型训练。
在许多实际应用中,由于标注数据的成本较高,很难获得大量的标注数据。
因此,半监督学习成为了解决这一问题的有效手段。
在半监督学习中,自训练方法是一种常见的技术,它通过利用已有的标注数据来为无标签数据生成标签,从而扩大了训练数据集的规模。
自训练方法的核心思想是利用已有的标注数据来生成伪标签,并将这些伪标签作为无标签数据的标签。
这种方法通常包括两个主要步骤:首先,使用标注数据训练一个初始模型;然后,使用这个初始模型为无标签数据生成伪标签,并将这些伪标签与原有的标注数据合并,重新训练模型。
在这个过程中,无标签数据的伪标签可能会不断地迭代生成,直到模型收敛。
自训练方法的一个关键问题是如何选择生成伪标签的阈值。
因为生成的伪标签可能会包含一定的噪声,过低的阈值会使噪声传播到真实标签数据中,影响模型的性能;而过高的阈值又会导致大量的无标签数据被丢弃,从而减少了训练数据的规模。
因此,选择一个合适的阈值是自训练方法中需要解决的一个关键问题。
除了选择阈值外,自训练方法中的另一个关键问题是如何处理不确定性。
由于无标签数据本身并没有标签信息,因此生成的伪标签可能会包含一定的不确定性。
在训练模型时,如何有效地利用这些不确定性信息是一个值得探讨的问题。
一种常见的做法是使用置信度阈值来筛选生成的伪标签,只保留置信度较高的伪标签,从而减少不确定性带来的影响。
自训练方法还可以与其他半监督学习方法相结合,从而进一步提高模型性能。
例如,可以将自训练方法与协同训练方法相结合,利用多个模型之间的互补性来提高性能;也可以将自训练方法与图卷积网络相结合,利用图结构中的信息来对无标签数据进行标注。
总的来说,自训练方法是一种简单而有效的半监督学习方法,它通过利用无标签数据来扩展训练数据集,从而提高模型的性能。
在实际应用中,自训练方法已经得到了广泛的应用,并取得了一定的成果。
支持向量机和AdaBoost目标跟踪新方法

支持向量机和AdaBoost目标跟踪新方法
宋华军;范志刚;朱明
【期刊名称】《微计算机信息》
【年(卷),期】2006(000)11S
【摘要】在目标跟踪领域,目标检测对跟踪的效果起决定性作用,提出一种用支持向量机进行目标跟踪的方法。
采用AdaBoost算法选择最具有代表性的Hart特征,将选择出来的特征作为支持向量机训练器的输入数据来训练目标检测分类器。
为了加速检测速度,使用了层叠加速检测算法。
实验结果表明,该算法不但提高了识别的正确率,而且大大提高了检测速度。
【总页数】3页(P290-292)
【作者】宋华军;范志刚;朱明
【作者单位】中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院研究生院,北京100039;上海交通大学计算机科学与工程系,上海200030【正文语种】中文
【中图分类】TB391
【相关文献】
1.融合粒子滤波和在线adaboost分类器的目标跟踪方法研究 [J], 暴磊;边群星;陈稳
2.基于粒子滤波和在线训练支持向量机的目标跟踪新方法 [J], 郑建宾
3.支持向量机和AdaBoost目标跟踪新方法 [J], 宋华军;范志刚;朱明
4.基于AdaBoost置信图的红外与可见光目标跟踪 [J], 张灿龙;苏建才;李志欣;王
智文
5.改进的AdaBoost-SVM算法用于无人机目标跟踪 [J], 左奎军; 李艳军; 曹愈远; 王宏宇
因版权原因,仅展示原文概要,查看原文内容请购买。
R-YOLOv5:自动切割的旋转的文本检测模型

R-YOLOv5:自动切割的旋转的文本检测模型
冉煜;张莉
【期刊名称】《计算机科学》
【年(卷),期】2022(49)S02
【摘要】YOLOv5模型是目前文本检测较好的模型之一,针对文本目标长度不一,文本轮廓难以精准检测以及受自然场景中文字倾斜、光影的影响文本较难检测的问题,提出了R-YOLOv5(Rotated-YOLOv5)文本检测模型。
首先融入基于仿射算法的文本分割模型,将图片的文本区域等比例切割为多个单字符块,解决文本没有闭合轮廓导致的YOLOv5模型锚定框拟合效果不佳的问题;然后使用旋转卷积层、旋转池化层、改进锚定框,提出了加强角度学习的RIoU(Rotated Intersection over Union)损失函数,实现了文本旋转倾斜特征的提取。
在ICDAR2019-LSVT上对原模型与改进后的模型进行实验,实验结果显示,RYOLOv5检测效果有较明显的提升,但由于模型层数加深,训练速率与检测速率相比原模型有小幅降低。
相比其他模型,由于YOLOv5自身的优点,R-YOLOv5的检测效果与检测速度均远好于其他模型。
【总页数】6页(P637-642)
【作者】冉煜;张莉
【作者单位】对外经济贸易大学信息学院
【正文语种】中文
【中图分类】TP391.41;TP183
【相关文献】
1.激光加工中自动旋转校位切割的研究
2.超媒体文本与模型信息库在自动检测设备软件中的应用
3.基于中文自由文本击键特征的自动欺骗检测模型
4.旋转切割与推进自动协调液压锚杆钻机性能分析
5.磨料水射流旋转切割岩石深度计算模型
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
影响胶体稳定的机理
位阻稳定 – 加入到体系中的聚分子在颗粒表面的 吸附造成互斥
位阻稳定
仅需要加入合适的聚分子 但以后如需要产生絮凝则很困难 聚分子成本高并可能产生副作用(如当瓷器的胚子
中有很多高分子,在培烧时会收缩而生成缺陷)
影响胶体稳定的机理
静电或电荷稳定 – 源自于带电颗粒的相互作用
静电或电荷稳定
Na4P2O7
Colloid:100ppm Minusil
10
100
1000
10000
100000
The effect of electrolytes (ppm) on z-potential of a colloidal dispersion
Zeta电位与添加剂浓度
研究样品中的添加剂浓度对产品zeta电位的影响 可为研发稳定配方的产品提供有用的信息 样品中已知杂质对zeta电位的影响可作为研制抗 絮凝的产品的有力工具
OH
OH OH
OH
OH OH
+ + + + + +
OH
OH
OH
OH
OH
OH
COOH COOH COOH COOH COOH COOH
COO COO
H+ H+ H+
COO H+ COO COO
H+ H+
COO
影响Zeta电位的因素:pH
Zeta Potential (mV)
6 0
4 0 2 0 等电点 不稳定 稳定
Zeta电位应用:废水处理
造纸,采矿,乳制品工业中的废水中 的大颗粒一般通过过滤与沉淀来去 除 小颗粒必须通过凝聚形成大团粒才 能被去除 关键在于减低Zeta电位从而凝聚可 发生
Zeta电位应用:饮料乳剂
饮料乳剂由下列成份组成
油相: 油,增重剂 水相: 水, 水化胶体, 酸
任一成分的误差都会造成不稳定:
-100 mV 0
Zeta电位是与一个颗粒在某 一特定介质中所带的总电荷 有关 确切地来说,是颗粒在剪切 面处的电位 与颗粒表面与分散介质有关 也可能与表面电位无关 微小的pH或离子浓度变化可 能会产生很大的zeta电位变 化 剪切面的位置变化也会影响 Zeta电位
Stern layer {
到颗粒表面的距离
Zeta电位应用:钻井泥浆
钻井液体中泥浆是很重要的组成部分 在远离钻头的地方须用带高表面电位的 悬浮液来保持粘土颗粒的分离使得颗粒 能透过多空的井壁,填塞土层的小孔从 而形成不透水的涂层来防止钻井液体的 流失 在钻头附近,需用低表面电位的颗粒来 形成絮状悬浮液.这样一来,井就不会被 堵住
Zeta电位应用:工程陶瓷与应用陶瓷
产品配方
研究不同成分在配方中的效果
稳定性试验
预测长期稳定性,取决于药物颗粒的高Zeta 电位 减少试验配方的次数
或形成弱絮凝悬浮液,药物颗粒由于有 近零的Zeta电位而形成松散的质团.轻 微的摇晃即可重新形成悬浮液.(日本汤) 药物载体
Zeta电位应用:漆
漆中的色素颗粒必须达到很好的分散从而形成具 有正确颜色的光滑漆面 由于低Zeta电位而造成的色素聚集体会改变漆的 光泽,表面结构,甚至颜色
此理论提出当颗粒接近时颗粒之间的能量障碍来 自于互斥力 当颗粒有足够的能量克服此障碍时,互吸力将使 颗粒进一步接近并不可逆的粘在一起
胶体稳定性: DLVO理论
胶体稳定性: DLVO理论
在某些情况下,如高盐浓度,有可能有一个“二 级能量最低点”,形成颗粒间很弱的并且可逆的 粘合
这些弱絮凝不会由于布朗运动而解散,但可在搅
固体
Gouy层或扩散层
溶液
剪切面 内 Helmholtz 面 外 Helmholtz 面
-+ + -
+ +
+
+ +
Gouy面
+
Otto Stern (18881969),德裔美国物 理学家,由于分子束 的研究获1943年诺贝 尔物理奖。但最著名 的是双电层的研究.
什么是Zeta电位?
剪切面
扩散层
表面电位 Stern电位 Zeta电位
阳离子表面活性剂
ClRNH3+ RNH3+ ClRNH3+ RNH3+
ClRNH3+
RNH3+ ClRNH3+ ClRNH3+
ClRNH3+ Cl- RNH + 3 RNH3+
表面电荷的来源:带电离子与离子表面活性剂的 吸附
阴离子表面活性剂
RSO 3 H+ RSO 3 H+ RSO 3 H+ RSO 3
一般来说, Zeta电位愈高,颗粒的分散体系愈稳定 水相中颗粒分散稳定性的分界线一般认为在+30mV或 -30mV 如果所有颗粒都带有高于+30mV或低于-30mV的zeta 电位,则该分散体系应该比较稳定
影响Zeta电位的因素
分散体系的Zeta电位可因下列因素而变化:
pH 的变化 溶液电导率的变化 某种特殊添加剂的浓度,如表面活性剂,高分子
假如往这一悬浮液中加入酸性物质,在一定程度
时,颗粒的电荷将会被中和 进一步加入酸,颗粒将会带更多的正电
Zeta电位与pH
Zeta电位对pH作图在低pH将是正的,在高pH将是 负的 这中间一定有一点会通过零zeta电位
这一点称为等电点,是相当重要的一点
通常在这一点胶体是最不稳定的
Zeta电位与pH
乳状物之沉淀或上浮 (相分离) 絮凝(油滴聚集) 乳化液的聚结 (形成大滴)
关键: 颗粒大小,表面电位,密度 差异
动电学效应
40 30 20
Zeta 电位 (mV)
10 0 -10 -20 -30 -40 -50 3 4 5 6 7 8 9 10 11 12
Al2O3/CPE Y2O3/CPE Al2O3/APE Y2O3/APE
pH
Zeta电位应用:矿物与矿石
矿石通过碾碎,与收集剂混合, 悬浮,与浮选来达到分离 其效率取决于收集剂在矿石颗 粒上的吸附 Zeta电位可用来控制此种吸附
颗粒表面任何酸性集团的离解会使表面带上负电 颗粒表面任何碱性集团的离解会使表面带上正电 电荷的多少取决于表面酸碱的强度与溶液的pH
表面电荷来源:表面基团的离解
酸基团的离解
COOH COOH COOH COOH COOH COOCOOCOOCOOCOOH+ H+ H+ H+ H+ H+
COOH
COO-
无机离子可有两种方法与带电表面相作用
非选择性吸附.对于等电点没有影响
选择性吸附.会改变等电点
即使很低浓度的选择性吸附离子,也会对Zeta电位 有很大的影响 有时选择性吸附离子甚至会造成颗粒从带负电变 成带正电,从带正电变成带负电
AlCl3
CaCl2
KCl
K2SO4
z(mV)
NaCl(tap water)
奶)
反相乳状液(inverse emulsions) –细小水滴分散 在非水相中(原油) 胶体悬浮液(sols or colloidal suspensions) – 微小颗粒分散在液相中(漆,泥浆)
胶体体系举例
凝胶(gels) – 聚分子分散在液相中 聚合体胶体(association colloids) – 表面活性 剂分子在水中集合成微胞;某些集合体能形成有 序结构与液晶
疫苗颗粒的Zeta电位
不同疫苗配方的长期稳定性可通过Zeta电位来 预测
配方 A
8 8 6
配方 B
6
强度
均值 = - 52mV
4 2 -100 0 100 Zeta电位(mV)
强度
均值 = - 24mV
4 2
-100 0 100 Zeta电位(mV)
氧化钇与氧化铝粉末
Zeta电位用于在不同分散剂(CPE或APE)下选 择适当酸碱度以达到最佳分散
造成分散体系不稳定的机理
絮凝 稳定体系
沉降
凝结
絮凝
沉降
凝结
胶体稳定性: DLVO理论
在1940年代Derjaguin, Landau, Verway与 Overbeek 提出了描述胶体稳定的理论 认为胶体体系的稳定性是当颗粒相互接近时它们 之间的双电层互斥力与范德瓦尔互吸力的净结果
胶体稳定性: DLVO理论
粒度分布与悬浮液的稳定性都极其重 要,决定产品的质量(厚度与密度).集 聚体会造成空洞而减弱强度 陶瓷产品一般是用Slip铸造来制造. 粘土悬浮液倒进多孔模具内,水流出 而形成结块的陶瓷胚 陶瓷的最后结构取决于颗粒的表面电 位 可用添加剂或调节pH来改善表面电位 以增加产品的质量稳定性
Zeta电位应用:药
胶体体系
a)颗粒分散体
固 固体悬浮液 (混染料颗粒的 塑胶) 固体乳液 (澳宝,珍珠) 气 固体泡沫 (扩张的塑料)
连续相 (介质)
液 气 固体气溶胶 (粉体,灰尘 ,烟雾)
分散相 (颗粒)
固
胶体悬浮液 (泥浆,漆, 牙膏)
乳状液 (牛奶,泡沫 (气泡,剃须膏 )
b)高分子溶液 生物高分子,聚合物溶液
胶体体系
在分散体中的颗粒可能生成聚合体而变成大颗粒 沉淀 新形成的集合体称为絮状物(FLOC),其过程称
为絮凝( FLOCCULATION )- 其过程是可逆的
(DEFLOCCULATION) 如果集合体变成更紧密的聚合体,其过程称为凝 结(COAGULATION )– 其过程是不可逆的
ZETASIZER NANO 系列电位培训课程