FANUC机器人EE接头
《FANUC机器人》课件

设计安全、易于操作的人机协作机器人,适用于装配、包装、检测 等需要人机协作的场景。
FANUC机器人在不同行业的应用案例
汽车制造业
用于车身焊接、涂胶、装 配等环节,提高生产效率 和产品质量。
电子制造业
用于装配、检测、包装等 环节,满足高精度、高效 率的生产需求。
食品与饮料行业
与其他设备的协同作业。
02
CATALOGUE
FANUC机器人产品系列
FANUC机器人的主要产品系列介绍
FANUC工业机器人系列
提供各种负载能力、臂展和高度的小型至大型机器人,适用于装 配、焊接、搬运等应用。
FANUC智能机器人系列
具备高度智能化和自主导航能力的机器人,适用于自动化生产线、 物流配送等领域。
拓展阶段
随着技术的不断积累, FANUC开始涉足机器人领 域,推出了第一代工业机 器人。
成熟阶段
经过不断的技术创新和市 场拓展,FANUC机器人逐 渐成为工业自动化领域的 领先品牌。
FANUC机器人在工业自动化中的应用
生产线自动化
FANUC机器人广泛应用于生产 线上的物料搬运、装配、检测 等环节,提高了生产效率和产
故障2
机器人运动轨迹不准确
排除方法
检查机器人关节是否松动,检查机器人末端执行器的安 装是否正确,检查机器人的控制系统参数设置是否正确 。
故障3
机器人出现异常声音或振动
排除方法
检查机器人各关节的轴承、链条等是否损坏,检查机器 人的平衡块是否松动。
FANUC机器人的寿命及更换周期
寿命
正常情况下,FANUC机器人的使用寿 命在8-10年左右。
FANUC机器人的优势与不足
Fanuc200ib机器人电气硬件介绍

PSU 电源顶部保险F1 8A 用于AC 输入 。
电源经变压器从CP1引入,经过F1.送入PSU 内部通过背板传输了如下电源 +5 +2.0V +3.3 +24v +24E +15V -15V主板接口描述:主板的内部结构面板电路板引申一下KM21与KM22的作用它们分别接至操作面板上上的急停按钮的两个常闭通道。
通过检测线圈的得电情况,将信号通过光耦,送至I/Olink 信号处理。
示教器保险丝,熔断后不显示。
接入急停单元。
橙色端子的定义上端接线端子。
(紧急停止、外部急停护栏等信号。
)紧急停止此部分全部采用端接片,本机器人急停采用的是网络信号。
、延时接触器紧急停止线路的输出。
(下侧)伺服ON/OFF 外部ON/OFF 此处也是全部短接,靠总线信号控制。
伺服放大器Fanuc 伺服放大器 一个放大器集成了6轴放大器接线详解左上角电源部分下、右管脚部分急停单元此急停单元的思考,此急停单元主要是靠KM1与KM2供给伺服单元供电接口(CRR38A)中间通过KA1与KA4控制, KA1与KA4的控制是靠三级管通过信号控制(DO),通过CRM95(接面板电路板) A4、B4引脚连接,检测伺服是否上电通过LS11 LS12光耦送入主板信号。
也通过CRM95(接面板电路板)中的A6、B6脚检测KM1与KM2是否吸合。
至于KA5的作用??连接释放电阻???有待考证。
嘿嘿详见急停单元电路图。
关于机器人各轴伺服电机机器人采用的是绝对值串行脉冲编码器,该编码器使用的是4节碱性电池保存数据此电池位于机器人J1轴下方底座的电池仓内此电池要求在控制器上电的情况下,每年予以更换一次。
特别注意,在进行机器人维护的时候,在没有确认系统备份的情况下,请勿将编码器通讯线拆卸下来,也不能再关机的状态下将电池盖子打开!!这样做会使轴零点丢失,需要重新进行零点校正。
详见后面的零点校正与机器人备份与还原。
目前此机器人能识别的存储介质。
1:USB 位于机器人操作柜的盖板下。
FANUC发那科机器人控制柜电气培训手册
FANUC发那科机器人控制柜内部电气连接方法培训手册2020.8.11错误分类概述1 错误分类概述错误分类的目的是为了更容易地进行故障诊断。
每一次故障诊断前都要进行错误分类。
识别错误以及症状的类别,要先于故障诊断。
每一类错误在机器人操作中都同等严重。
错误类型分为:第一类错误第二类错误第三类错误第四类错误1.1第一类错误概述症状控制器死机示教盒屏幕空白潜在的原因控制器AC电源存在问题断开器的问题变压器的问题控制器DC电源线路的问题示教盒/缆线问题电源供给单元损坏电源供给单元保险丝F1/F4熔断开/关电路的问题面板电路板保险丝2缆线21.2第二类错误概述第二类错误症状示教盒锁死,没反应潜在的原因软件故障主板的问题CPU模块,连同DRAMFROM/SRAM模块示教盒/缆线PSU或者底板(激活信号)的问题辅助轴控制卡的问题。
1.3第三类错误概述第三类错误症状错误指示灯亮KM1和KM2关闭,因此伺服没有电源屏幕上显示诊断信息潜在的原因伺服放大器的问题马达/SPC的问题编码器/制动模块的问题紧急停止线路的问题紧急停止线路板的问题紧急停止单元,连带KM1和KM2的问题面板电路板的问题缆线问题。
1.4第四类错误概述第四类错误症状机器人只能在T1或T2模式下工作能够从示教盒运行程序可能的原因通讯或输入/输出的问题与PLC之间没有通信行程开关等损坏不正确的当地/远程开关设置,软件控制的。
31.5基于保险丝的故障诊断1.5.1电源供给单元F1:AC F2:+24E F3:+24V图 1-1Power supply unit :电源供给单元F1 8.0A Fuse for AC input :F1,8.0安培,F3 7.5A Fuse for +24E :F3 7.5安培 +24E F4 7.5A Fuse for +24V :F4 7.5安培 +24V PIL LED (green )ALM LED (red )for AC alarm display :名称保险丝熔断后的症状措施F1 电源供给单元的二极管1、检查连接到电源供给单元连接器CP2和CP3 (PIL:绿色)不亮;不能的零件(风扇)和缆线,看是否存在短路。
FANUC机器人控制柜CRMA-15.16接线图(2)

B-82725EN-2/05 CONNECTIONS4. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES 4.3INTERFACE FOR PERIPHERAL DEVICES4.3.1Connection between the Main board (CRMA15, CRMA16) andPeripheral Devices-2NDEND EFFECTOR INTERFACESControl unit (peripheral device control interface A1)+24FConnector pin No.CRMA15 (49、50)Peripheral deviceDI101 DI102 Receiver circuit3.3kRV CRMA15 (01) CRMA15 (02) DI103DI104 RV DI105 RV DI106 RV DI107 RV DI108 RV SDICOM1 RV DI109 RV DI110 RV DI111 RV DI112 RV DI113 RV DI114 RV DI115 RV DI116 RV DI117 RV DI118 RV DI119 RV DI120 RV SDICOM2RVCRMA15 (03) CRMA15 (04) CRMA15 (05) CRMA15 (06) CRMA15 (07) CRMA15 (08) CRMA15 (19) CRMA15 (09) CRMA15 (10) CRMA15 (11) CRMA15 (12) CRMA15 (13) CRMA15 (14) CRMA15 (15) CRMA15 (16) CRMA15 (22) CRMA15 (23) CRMA15 (24) CRMA15 (25) CRMA15 (20)CRMA15 (17、18)0VNOTEIn this diagram, common voltage of input devices is +24V.RVRV4. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES CONNECTIONS B-82725EN-2/05Control unit (peripheral device control interface A1)DOSRC1Connector pin No.CRMA15 (31,32)Driver circuitDVDO101CRMA15 (33)Peripheral device+24V 0V+24V regulatedpower supplyLOADRELAYDO102 DO103 DO104 DO105 DO106 DO107 DO108DVDVDVDVDVDVDVCRMA15 (34)CRMA15 (35)CRMA15 (36)CRMA15 (37)CRMA15 (38)CRMA15 (39)CRMA15 (40)CRMA15 (17、18)LOADLOADLOADLOADLOADLOADLOAD 0VA maximum output current per DO point is 0.2 A.B-82725EN-2/05CONNECTIONS 4. PERIPHERAL DEVICE AND END EFFECTOR INTERFACESControl unit (peripheral device control interface A2)+24F Connector pin No.CRMA16 (49、50)Peripheral deviceXHOLD RESET Receiver circuit3.3kRVCRMA16 (01)CRMA16 (02)CRMA16 (03)CRMA16 (04)CRMA16 (05)CRMA16 (06)CRMA16 (07)CRMA16 (08)CRMA16 (19)CRMA16 (17、18).RVRVRVSTARTRVENBLPNS1PNS2PNS3PNS4SDICOM3RVRVRVRV0 VNOTEIn this diagram, common voltage of input devices is +24V4. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES CONNECTIONS B-82725EN-2/05Control unit (peripheral device control interface A2)Connector pin No.Pe ripheral device+24V 0VDriver circuitDO109DVCRMA16 (31、32)CRMA16 (41)+24V regulatedpower supplyLOADRELAYDO110DO111DO112DO113DO114DO115DO116DO117DO118DO119DO120 CMDENBLFAULTBATALMBUSY DVDVDVDVDVDVDVDVDVDVDVDVDVDVDVCRMA16 (42)CRMA16 (43)CRMA16 (44)CRMA16 (45)CRMA16 (46)CRMA16 (47)CRMA16 (48)CRMA16 (26)CRMA16 (27)CRMA16 (28)CRMA16 (21)CRMA16 (33)CRMA16 (34)CRMA16 (35)CRMA16 (36)LOADLOADLOADLOADLOADLOADLOADLOADLOADLOADLOADLOADLOADLOADLOADCRMA16 (17、18)0VA maximum output current per DO point is 0.2 A.DOSRC2B-82725EN-2/05 CONNECTIONS4. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES The following shows the connector interface of the optional peripheral device cables on the peripheraldevice side.CONNECTIONS B-82725EN-2/054. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES 4.3.2Connection between the Process I/O Board MA andPeripheral DevicesNOTE1 The peripheral device connection cable is optional.2 The DOSRC3 pin of CRMA52A and CRMA52B supply power to the drivers (connect all pins).B-82725EN-2/05CONNECTIONS 4. PERIPHERAL DEVICE AND END EFFECTOR INTERFACESControl unit +24F Connector pin No.Peripheral device (Peripheral device controlinterface:B1)DI121RVDI122RVDI123RVDI124RVDI125RVDI126RVDI127RVDI128RVDI129RVDI130RVCOM1RV+24E B Common-level change-over setting pin (ICOM1) ACRMA52A (49、50)CRMA52A (01)CRMA52A (02)CRMA52A (03)CRMA52A (04)CRMA52A (05)CRMA52A (06)CRMA52A (07)CRMA52A (08)CRMA52A (09)CRMA52A (10) CRMA52A (17、18)0V0V(This common voltage is for 24V.)DOSRC3Driver circuitDVDO121Connector pin No.CRMA52A (31、32)CRMA52A (33)EXT24V+24V0V+24V regulatedpower supplyLOADRELAYDO122 DO123 DO124 DO125 DO126 DO127 DO128DVDVDVDVDVDVDVCRMA52A (34)CRMA52A (35)CRMA52A (36)CRMA52A (37)CRMA52A (38)CRMA52A (39)CRMA52A (40)CRMA52A (29、30)0VLOADLOADLOADLOADLOADLOADLOADEXT0VNOTEIn this diagram, common voltage of input device is 24V.4. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES CONNECTIONS B-82725EN-2/05 Control unit +24F Connector pin No.Peripheral device(Peripheral device control interface:B2)DI131RVDI132RVDI133RVDI134RVDI135RVDI136RVDI137RVDI138RVDI139RVDI140RVCOM1RV+24E B ACRMA52B (49、50)CRMA52B (01)CRMA52B (02)CRMA52B (03)CRMA52B (04)CRMA52B (05)CRMA52B (06)CRMA52B (07)CRMA52B (08)CRMA52B (09)CRMA52B (10) CRMA52B (17、18)0VCommon-level change-over setting pin (ICOM2)(This common voltage isfor 24V.)DOSRC30VConnector pin No.EXT24V+24V0VDriver circuitDO129DVCRMA52B (31、32)CRMA52B (33)+24V regulatedpower supplyLOADRELAYDO130 DO131 DO132 DO133 DO134 DO135 DO136DVDVDVDVDVDVDVCRMA52B (34)CRMA52B (35)CRMA52B (36)CRMA52B (37)CRMA52B (38)CRMA52B (39)CRMA52B (40)CRMA52B (29、30)0VLOADLOADLOADLOADLOADLOADLOADEXT0VNOTEIn this diagram, common voltage of input device is 24V.CONNECTIONS 4. PERIPHERAL DEVICE AND END EFFECTOR INTERFACESThe following shows the connector interface of the optional peripheral device cables on the peripheral device side.ControllerCRMA 52A 010203040506070809101112131415161718DI 121DI 122DI 123DI 124DI 125DI 126DI 127DI 128DI 129DI 1300V0V19202122232425262728293031320V0VDOSRC3DOSRC3Peripheral device A133 DO 12134 DO 12235 DO 12336 DO 12437 DO 12538 DO 12639 DO 12740 DO 128414243444546474849 24F50 24FCRMA 52B 010203040506070809101112131415161718DI 131DI 132DI 133DI 134DI 135DI 136DI 137DI 1380V0V19202122232425262728293031320V0VDOSRC3DOSRC3Peripheral device A233 DO 12934 DO 13035 DO 13136 DO 13237383940414243444546474849 24F50 24FDI 139DI 140DO 134DO 133DO 135DO 136。
FANUC硬件连接
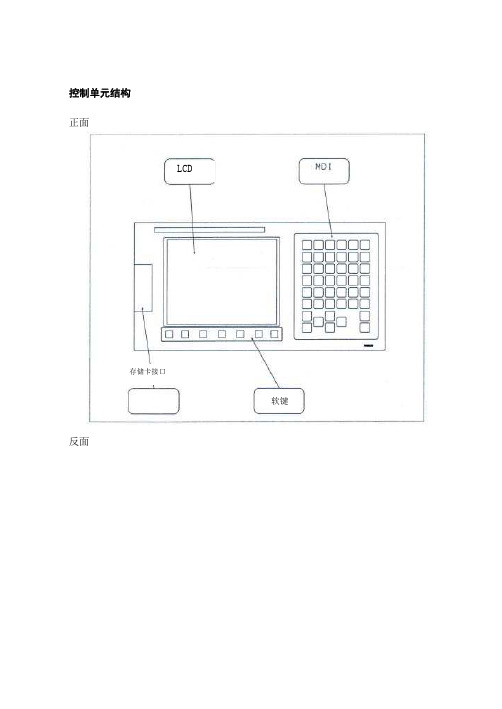
控制单元结构正面LCD存储卡接口软键反面图FANUC 0i D/0i mate D 系统接口图系统各端子的功能如表 1-2-1: 端 口 号 COP10A CD38A CA122 JA2 JD36A/JD36B JA40 JD51A JA41 用 途伺服 FSSB 总线接口,此口为光缆口 以太网接口 系统软键信号接口 系统 MDI 键盘接口 RS-232-C 串行接口 1/2 模拟主轴信号接口/高速跳转信号接口 I/O link 总线接口 串行主轴接口(到驱动器 JA7B)/ 主轴独立编码器接口(模拟主轴) CP1 3、FANUC 伺服控制单元及 FSSB 总线 系统电源输入(DC24V)(1) 、FANUC 伺服系统的构成 如果说 CNC 控制系统是数控机床的大脑和中枢,那么伺服和主轴驱动就是数控 机床的四肢,他们是大脑的执行机构。
FANUC 驱动部分从硬件结构上分,主要有下面四个组成部分:(a)轴卡---就是我们在介绍系统接口时,接光缆的那块 PCB 板,在现今的全数字 伺服控制中,都已经将伺服控制的调节方式、数学模型甚至脉宽调制以软件的形式 融入系统软件中,而硬件支撑采用专用的 CPU 或 DSP 等,这些部件最终集成在轴控 制卡。
轴卡的主要作用是速度控制与位置控制。
如图图轴卡(b)放大器---接收轴卡(通过光缆)输入的光信号转换为脉宽调制信号,经过前级 发达驱动 IGBT 模块输出电机电流。
如图 1-2-3图 1-2-3 放大器 (c)电机---伺服电机或主轴电机,放大器输出的驱动电流产生旋转磁场,驱动转子 旋转。
如图 1-2-4图 1-2-3 伺服电机 (d)反馈装置---由电机轴直连的脉冲编码器作为半闭环反馈装置。
FANUC 早期的产 品使用旋转变压器做半闭环位置反馈,测速发电机作为速度反馈, 但今天这种结构已经被淘汰。
如图 1-2-5。
图 1-2-5 伺服电机编码器(1)-- (4)的相互关系是: 轴卡(1)接口 COP10A 输出脉宽调制指令, 并通过 FSSB(Fanuc Serial Servo Bus 发那科串行伺服总线)光缆与伺服放大器(2)接口 COP10B 相连,伺服放大器整形放大后,通过动力线输出驱动电流到伺服电机(3),电机转动后,同轴的编码器(4)将速度反馈和位置反馈到 FSSB 总线上,最终回到轴卡上进行处理。
fanuc系统硬件连接图

说明:代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆注: 1.根据线标K*可由后面章节查看该端口的管脚连接图2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池3.电机与放大器的最大电流必须匹配综合接线图(i说明:代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆注: 1.根据线标K*可由后面章节查看该端口的管脚连接图2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池3.电机与放大器的最大电流必须匹配说明:代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆注: 1.根据线标K*可由后面章节查看该端口的管脚连接图2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池3.电机与放大器的最大电流必须匹配说明:代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆注:1.根据线标K*可由后面章节查看该端口的管脚连接图2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池3.电机与放大器的最大电流必须匹配DC24Vii ipositioncoder24V24V接近开关制动插脚,制动插脚i 电源i 电源。
耐用通信profinet转ethernet网关连接发那科机器人配置案例

PROFINET转EtherNet网关连接发那科机器人配置案例本案例是西门子1200PLC通过PROFINET转EtherNet网关连接发那科搬运机器人配置案例。
所需设备:西门子1200PLC、Profinet转EtherNet IP网关、Fanuc机器人。
1、使用方法打开西门子博图配置软件,添加PLC;2、导入PROFINET转EtherNet网关GSD文件;3、安装PROFINET转EtherNet网关GSD后选择对应模块;4、设置PROFINET转EtherNet网关IP及设备名称(本例名称为PN1设备IP为192.168.20.10);5、设置发送接收数据长度(可添加更大长度);6、下载组态到PLC,设置好机器人的IP地址,打开机器人设置菜单找到主机通讯选项;7、找到搬运机器人控制端的TCP/IP选项;8、设置机器人的IP地址(本例为192.168.0.10);9、设置机器人连接的远程I/O的IP地址即PROFINET转EtherNet网关ethernet端的IP地址;10、添加一个链接;11、设置好从站IP(本例为192.168.0.5)厂商ID为170,设备类型11,产品代码1输入输出大小32个字(64字节),Assembly instance的输入输出为100/150,如果设备不能导入eds 文件,参数可从网关的eds文件中查找;12、打开PROFINET转EtherNet网关配置软件,因为PROFINET转EtherNet网关作为EtherNet 从站,所以选择PN2EIP;13、设置PROFINET转EtherNet网关Profinet端的IP地址及设备名称(和博图组态保持一致);14、数据长度为64字节(机器人设置为32个字所以要换算为64字节保持一致);15、设置PROFINET转EtherNet网关在EtherNet端的IP地址;16设置PROFINET转EtherNet网关在EtherNet IP中的数据长度;17、下载配置到PROFINET转EtherNet网关后重新上电即可使用。
FANUC机器人PROFINET配置

主题 汇报人 日期
FANUC机器人PROFINET配置
版本记录
版本号
更新人
更新时间
更新内容
备注
Revision Log
目录
1.关于FANUC机器人PROFINET的基础知识 2.关于FANUC机器人PROFINET机器人侧配置 3.关于FANUC机器人PROFINET上位PLC的组态
PROFINET机器人配置
插槽大小(SlotSize)选择64Byte 并按下适用(APPLY)并保存,机器人提示重启,重启之后 完成设置,通讯成功以后,IO-设备显示绿色
PROFINET上位PLC的组态
关于FANUC机器人在S7-1500CPU的组态, 1.首先需要安装FANUC机器人R834板卡的GSD文件
PROFINET机器人配置
4. 点击DISP按钮,将光标移到右侧画面 设置IP地址 子网掩码 网关(可以不设置)名称(只支持小写) 以上的设置,必须和PLC的硬件组态保持一致
光标在 2频道 时,按下“→”键,将 2频道 展开,开关不要需设置,保持默认值
PROFINET机器人配置
5.在 IO‐设备 里面对 IO 设备进行选择,点DISP将光标移到右侧,点上下按钮, 将光标移到插槽1,点击F4(编辑)打开插槽1设定画面 插槽1设置,选择类型,我们选择 输入输出插槽(Input Output Slot )
如果上位PLC为安全PLC,机器人从站还可同时与安全PLC进行安全IO与普通IO的 交互
PROFINET基础知识
双通道的PROFINET接口,用作参考
1 通道1用于机器人做从站的通讯 2 通道2用于机器人做主站的通讯
ET机器人配置
FANUC机器人硬件介绍(NEW)
2023/11/4
机器人本体
控制器
电源断开器
示教器
FANUC 机器人硬件、接口、仿真 1 23
机器人本体硬件概况/控制器
Power Disconnect Circuit Breaker
电源断开线路的断开器
ON:打开机器人电源 /open the power OFF:关闭机器人电源/close the power
1)点动机器人 2)编写机器人程序 3)试运行程序 4)生产运行 5)查阅机器人的状态(I/O 设置,位置
显示屏 指示灯 急停开关 使能开关 键盘 DEADMAN SW
FANUC 机器人硬件、电池接口、仿真
IO单元
电源供应器
背板(基板)
操作面板
主板
R-J3i C控制器
外围设备
风扇 变压器
示教器 外围急停信号
对应分线器接线端子
FANUC 机器人硬件、接口、仿真
24V+
Process IO
2023/11/4
FANUC 机器人硬件、接口、仿真
Process IO
2023/11/4
FANUC 机器人硬件、接口、仿真
Process IO
2023/11/4
FANUC 机器人硬件、接口、仿真
Process IO
EE,USER,AIR, DP2,DS2
机器人本体外围接口
WELDING POWER WATER AIR
2023/11/4
FANUC 机器人硬件、接口、仿真
机器人本体外围接口
2023/11/4
FANUC 机器人硬件、接口、仿真
机器人本体外围接口
FANUC发那科机器人控制柜内部电气连接方法
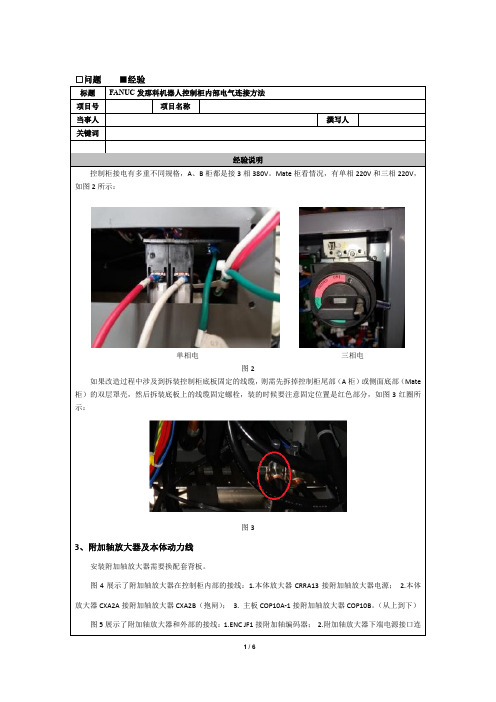
□问题■经验标题FANUC发那科机器人控制柜内部电气连接方法项目号项目名称当事人撰写人关键词经验说明控制柜接电有多重不同规格,A、B柜都是接3相380V。
Mate柜看情况,有单相220V和三相220V,如图2所示:单相电三相电图2如果改造过程中涉及到拆装控制柜底板固定的线缆,则需先拆掉控制柜尾部(A柜)或侧面底部(Mate 柜)的双层罩壳,然后拆装底板上的线缆固定螺栓,装的时候要注意固定位置是红色部分,如图3红圈所示:图33、附加轴放大器及本体动力线安装附加轴放大器需要换配套背板。
图4展示了附加轴放大器在控制柜内部的接线:1.本体放大器CRRA13接附加轴放大器电源; 2.本体放大器CXA2A接附加轴放大器CXA2B(抱闸); 3. 主板COP10A-1接附加轴放大器COP10B。
(从上到下)图5展示了附加轴放大器和外部的接线:1.ENC JF1接附加轴编码器;2.附加轴放大器下端电源接口连图4图5抱闸单元有两种情形,使用本体放大器的抱闸(抱闸线缆连本体放大器CRR65CRM97连本体放大器的CRM97,CRR65AB/C/D连抱闸线缆到电机)右是附加轴编码器电池(安装在柜门上),从编码器线缆引出一根线接到电池。
图94.2、Model A板如图10所示为适用于A柜的模块,线缆从主板JD1A连到Model A板的JD1B和CP32,将线从主板拔掉,再将Model A板上的各个模块卸下,拧下螺丝完成拆除,安装则反之。
输入单元输出单元整体图104.3、其它通讯板及插槽主要涉及到Profibus、Profinet、DeviceNet、CC-Link,图11展示了DeviceNet的master板和slave板,master板有两层,第二层上面带拨码(红框所示)。
DeviceNet master DeviceNet slave图11还有一种双层板——Profinet子母板,包括Mother和Daughter板,虽然在改造单里有两项,但其实是一块板。
欧姆龙PLC及Fanuc机器人EIP连接步骤

以下是使用CJ2H-CPU68-EIP与法那科机器人EIP连接测试的步骤:1.在CX-Programmer内建立PLC,并且进行PLC的网址设置:在IO表中双击内置EIP模块进入IP地址设置(本例子EIP单元号为0,节点号为3),并将设置下载到PLC内:2.在PLC符号表内建立网络变量:定义好网络变量名及对应的地址,如果是多通道的数组,可以点击高级设置进入设置数组长度(注意:PLC内设置的是通道,但是在EIP上是以Byte 为单位计算交换字节数的,1CH=2Byte)3.在IO表内右键内置EIP模块继承启动Network Configurator For EthernetIP或者在CX-One内启动,双击或者拖曳CJ2H-CPU68-EIP的EIP模块添加到EIP网络上,右键模块修改模块的IP地址:双击模块进入tag set,点击Import将刚刚在CX-Programmer建立的网络变量上载上来:若使用不能建立在CX-Programmer内直接网络变量的PLC(没有内置EIP的PLC)和CJ1W-EIP21模块组合进行连接的话,也可以通过以下方式建立网络变量:双击CJ1W-EIP21模块,进入Tag Sets,点击Edit Tag,在Edit tags里面新建标签以及设置标签的大小(需要注意的是tag name里面必须要填写PLC地址)并注册:注册好后,需要修改Tag name的话可以在下面界面选择tag然后进入修改然后确定即可:点击菜单栏上的EDS File,选择Install,然后选择路径,安装Fanuc的EDS文件:在左边EDS栏目内会出现了Fanuc的Device,将其双击或者拖曳到EIP网络上,并修改其IP地址:双击Fanuc设备,设置其输出输入字节数并确定:双击CJ2B-EIP模块,将Fanuc设备连接到CJ2B-EIP上点击上图的New或者双击FZ series进入tag交换设置:在左边选择接受的tag和发送的tag并注册.选择网络连接类型,连接PLC,并将组态下载到PLC内:至此,PLC端设置完成(PS:若EIP模块报错,可能是由于以前设置的路由表与现状的网络部一致导致,请检通过CX-Integrator检查路由表是否设置正确)。
机器人1+X题库及参考答案

机器人1+X题库及参考答案一、单选题(共80题,每题1分,共80分)1、数字输入DI[1]为ON,DI[2]为OFF,执行“R[1]=DI[1]+DI[2]”,则R[1]的结果是()。
A、0B、1C、3D、执行错乱,产生随机数正确答案:B2、脉冲输出宽度可由变量$DEFPULSE指定,其单位为()。
A、1sB、0.1sC、0.5sD、0.2s正确答案:C3、以下哪个指令不属于运动附加指令。
( )A、OffsetB、Tool_OffsetC、ForD、INC正确答案:C4、PR[10]=(500,252,100,-10°,5°,-7°),PR[11]=(350,-285,80,20°,-8°,10°),若PR[12]=PR[10],PR[12,3]=PR[12,3]+PR[11,3],则PR[12]最终结果是()。
A、(500,-33,100,-10°,5°,-7°)B、(850,252,100,-10°,5°,-7°)C、(850,-33,180,10°,25°,-15°)D、(500,252,180,-10°,5°,-7°)正确答案:D5、在各种模式下试运行程序,()模式下的运行速度是一致的。
A、T1和T2B、T1和AUTOC、T2和AUTOD、T1、T2和AUTO6、某机器人程序在使用单步试运行时,机器人执行某行程序后能准确到达A点,但在实际连续工作中,机器人不再通过该点,其原因是()。
A、该行程序CNT参数设置了转弯半径B、该行程序CNT参数没有设置转弯半径C、该行程序使用了FINED、以上说法均错误正确答案:A7、在FANUC机器人中,使用机架来标记I/O模块的种类,当机架号为0时表示以下哪种I/O模块。
A、处理I/O印制电路板B、I/O单元MODEL A/BC、I/O连接设备从机接口D、CRMA15/CRMA16正确答案:A8、工业机器人的额定负载是指在规定性能范围内()所能承受的最大负载允许值。
FANUC机器人控制柜CRMA-15.16接线图(2)

FANUC机器⼈控制柜CRMA-15.16接线图(2)B-82725EN-2/05 CONNECTIONS4. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES 4.3INTERFACE FOR PERIPHERAL DEVICES4.3.1Connection between the Main board (CRMA15, CRMA16) andPeripheral Devices-2NDEND EFFECTOR INTERFACESControl unit (peripheral device control interface A1)Connector pin No.CRMA15 (49、50)Peripheral deviceDI101 DI102 Receiver circuit3.3kRV CRMA15 (01) CRMA15 (02) DI103DI104 RV DI105 RV DI106 RV DI107 RV DI108 RV SDICOM1 RV DI109 RV DI110 RV DI111 RV DI112 RV DI113 RV DI114 RV DI115 RV DI116 RV DI117 RV DI118 RV DI119 RV DI120 RV SDICOM2RVCRMA15 (03) CRMA15 (04) CRMA15 (05) CRMA15 (06) CRMA15 (07) CRMA15 (08) CRMA15 (19) CRMA15 (09) CRMA15 (10) CRMA15 (11) CRMA15 (12) CRMA15 (13) CRMA15 (14) CRMA15 (15) CRMA15 (16) CRMA15 (22) CRMA15 (23) CRMA15 (24) CRMA15 (25) CRMA15 (20)CRMA15 (17、18)0VNOTEIn this diagram, common voltage of input devices is +24V.RVRV4. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES CONNECTIONS B-82725EN-2/05Control unit (peripheral device control interface A1)DOSRC1Connector pin No.CRMA15 (31,32)Driver circuitDVDO101CRMA15 (33)Peripheral device+24V 0V+24V regulatedpower supplyLOADRELAYDO102 DO103 DO104 DO105 DO106 DO107 DO108DVDVDVDVDVDVCRMA15 (34)CRMA15 (35)CRMA15 (36)CRMA15 (37)CRMA15 (38)CRMA15 (39)CRMA15 (40)CRMA15 (17、18)LOADLOADLOADLOADLOADLOADLOAD 0VA maximum output current per DO point is 0.2 A.B-82725EN-2/05CONNECTIONS 4. PERIPHERAL DEVICE AND END EFFECTOR INTERFACES Control unit (peripheral device control interface A2)+24F Connector pin No.CRMA16 (49、50)Peripheral deviceXHOLD RESET Receiver circuit3.3kRVCRMA16 (01)CRMA16 (02)CRMA16 (03)CRMA16 (04)CRMA16 (05)CRMA16 (06)CRMA16 (07)CRMA16 (08)CRMA16 (19)CRMA16 (17、18).RVRVRVSTARTRVENBLPNS1PNS2PNS3PNS4SDICOM3RVRVRVRV0 VNOTEIn this diagram, common voltage of input devices is +24V4. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES CONNECTIONS B-82725EN-2/05 Control unit (peripheral device control interface A2)Connector pin No.Pe ripheral device+24V 0VDriver circuitDO109DVCRMA16 (31、32)CRMA16 (41)+24V regulatedpower supplyLOADRELAYDO110DO111DO112DO113DO114DO115DO116DO117DO118DO119DO120 CMDENBL FAULT BATALMBUSY DVDVDVDVDVDVDVDVDVDVDVDVDVDVDVCRMA16 (42) CRMA16 (43) CRMA16 (44) CRMA16 (45) CRMA16 (46) CRMA16 (47)CRMA16 (48)CRMA16 (26)CRMA16 (27)CRMA16 (28)CRMA16 (21)CRMA16 (33)CRMA16 (34)CRMA16 (35)CRMA16 (36)LOADLOADLOADLOADLOADLOADLOADLOADLOADLOADLOADLOADLOADLOADLOADCRMA16 (17、18)0VA maximum output current per DO point is 0.2 A.DOSRC2B-82725EN-2/05 CONNECTIONS4. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES The following shows the connector interface of the optional peripheral device cables on the peripheraldevice side.CONNECTIONS B-82725EN-2/054. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES 4.3.2 Connection between the Process I/O Board MA and Peripheral DevicesNOTE1 The peripheral device connection cable is optional.2 The DOSRC3 pin of CRMA52A and CRMA52B supply power to the drivers (connect all pins).B-82725EN-2/05CONNECTIONS 4. PERIPHERAL DEVICE AND END EFFECTOR INTERFACES Control unit +24F Connector pin No.Peripheral device (Peripheral device controlinterface:B1)DI121RVDI122RVDI123RVDI124RVDI125RVDI126RVDI127RVDI128RVDI129RVDI130RVCOM1RV+24E B Common-level change-over setting pin (ICOM1) A CRMA52A (49、50)CRMA52A (01)CRMA52A (02)CRMA52A (03)CRMA52A (04)CRMA52A (05)CRMA52A (06)CRMA52A (07)CRMA52A (08)CRMA52A (09)CRMA52A (10) CRMA52A (17、18)0V0V(This common voltage is for 24V.)DOSRC3Driver circuitDVDO121Connector pin No.CRMA52A (31、32)CRMA52A (33)EXT24V+24V0V+24V regulatedpower supplyLOADRELAYDO122 DO123 DO124 DO125 DO126 DO127 DO128DV DVDVDVDVDVDVCRMA52A (34)CRMA52A (35)CRMA52A (36)CRMA52A (37)CRMA52A (38)CRMA52A (39)CRMA52A (40)CRMA52A (29、30)0VLOADLOADLOADLOADLOADLOADLOADEXT0VNOTEIn this diagram, common voltage of input device is 24V.4. PERIPHERAL DEVICE ANDEND EFFECTOR INTERFACES CONNECTIONS B-82725EN-2/05 Control unit +24F Connector pin No.Peripheral device (Peripheral device control interface:B2)DI131RVDI132RVDI133RVDI134RVDI135RVDI136RVDI137RVDI138RVDI139RVDI140RVCOM1RV+24E B ACRMA52B (49、50)CRMA52B (01)CRMA52B (02)CRMA52B (03)CRMA52B (04)CRMA52B (05)CRMA52B (06)CRMA52B (07)CRMA52B (08)CRMA52B (09)CRMA52B (10) CRMA52B (17、18)0VCommon-level change-over setting pin (ICOM2)(This common voltage isfor 24V.)DOSRC30VConnector pin No.EXT24V+24V0VDriver circuitDO129DVCRMA52B (31、32)CRMA52B (33)+24V regulatedpower supplyLOADRELAYDO130 DO131 DO132 DO133 DO134 DO135 DO136DV DVDVDVCRMA52B (34)CRMA52B (35)CRMA52B (36)CRMA52B (37)CRMA52B (38)CRMA52B (39)CRMA52B (40)CRMA52B (29、30)0VLOADLOADLOADLOADLOADLOADLOADEXT0VNOTEIn this diagram, common voltage of input device is 24V.CONNECTIONS 4. PERIPHERAL DEVICE AND END EFFECTOR INTERFACESThe following shows the connector interface of the optional peripheral device cables on the peripheral device side. ControllerCRMA 52A 010203040506070809101415161718DI 121 DI 122 DI 123 DI 124 DI 125 DI 126 DI 127 DI 128 DI 129 DI 130 0V0V19202122232425262728293031320VDOSRC3 Peripheral device A133 DO 12134 DO 12235 DO 12336 DO 12437 DO 12538 DO 12639 DO 12740 DO 128414243444546474849 24F50 24FCRMA 52B 01020304050607080910111213161718DI 131DI 132DI 133DI 134DI 135DI 136DI 137DI 1380V0V19202122232425262728293031320V0VDOSRC3 DOSRC3 Peripheral device A2 33 DO 12936 DO 132 37383940414243444546474849 24F50 24FDI 139DI 140 DO 134 DO 133 DO 135 DO 136。