OMRON实验指导书-六个
欧洲OMRON工业自动化产品说明书

Industrial AutomationSysmac NJ5 CPU, 20 mB memory, built-in EtherCAT (16 servo axes, in total 192 EtherCAT nodes) and EtherNet/IPController functionality Motion control, OPC-UA, Sequence control Max. number of synchronous axes16Max. number of axes (incl. virtual)16Max. number of robots0Primary task cycle time0.5 msProgram memory20 MBVariables memory 6 MBCommunication port(s)EtherCAT Master, EtherNet/IP, USBCommunication option(s)CAN, CompoNet Master, DeviceNet Master, DeviceNet Slave, EtherCAT Slave, MODBUS Master, MODBUS Slave, PROFIBUS DP Master, PROFIBUS DP Slave, PROFINET Master, Serial RS-232C, Serial RS-422, Serial RS-485Max. number of remote I/O nodes192I/O system CJ I/O Bus Max. number of expansion units40 Height90 mm Width90 mm Depth90 mm Weight550 gGX-JC033-port EtherCAT Junction module, 24 VDC power supplyGX-JC066-port EtherCAT Junction module, 24 VDC power supplyGX-JC06-H6-port EtherCAT Junction module, 24 VDC power supply, with node switchesHMC-SD492 4 GB SD memory cardNJ-PA3001Sysmac NJ power supply unit, 100-240 VAC, 30 W, "RUN" output relayNJ-PD3001Sysmac NJ power supply unit, 24 VDC, 30 W, "RUN" output relayW4S1-05D 5-port enhanced Ethernet switchCJ1W-BAT01Battery for CJ1M PLCsCJ1W-TER01End plate for CJ1 CPU rack or expansion rack. Only required as spare part.FDK CR14250SE Battery Safety DatasheetEN PDF 147 KBNJ-Series DatasheetEN PDF 3.05 MBNJ-Series CPU Unit Hardware Users ManualENPDF 6.95 MBNJ-series -[DeviceNet]-3G3MX2-series Inverter Connection GuideENZIP 2.98 MBNJ-series -[DeviceNet]-3G3RX-V1-series InverterConnection GuideENZIP 3.75 MBNJ-series -[DeviceNet]-ABB IRC5 Robot Controller Connection GuideEN ZIP 5.81 MBNJ-series -[DeviceNet]-NE1A-series Safety Network Controller Connection GuideENPDF 3.47 MBNJ-series -[EtherCAT]-3G3MX2-series Inverter Connection GuideENPDF 1.72 MBNJ-series -[EtherCAT]-3G3MX2-series Type V1Connection GuideENPDF 2.18 MBNJ-series -[EtherCAT]-3G3RX-V1-series InverterConnection GuideENPDF 2.28 MBNJ-series -[EtherCAT]-Balluff BNI ECT-508Connection GuideENPDF 1.85 MBNJ-series -[EtherCAT]-Balluff RFID (BIS V Series)Connection GuideENPDF 1.76 MBNJ-series -[EtherCAT]-CKD MW4G-seriesNW4Gx-T7ECxxx (W4G-OPP8-xEC-xx)Connection GuideEN PDF 1.2 MBNJ-series -[EtherCAT]-Copley Accelnet Connection GuideENZIP 5.75 MBNJ-series -[EtherCAT]-Copley Xenus Plus XEL Connection GuideENZIP 3.81 MBNJ-series -[EtherCAT]-DELTA ELECTRONICS ASDA-A2-series Connection GuideEN ZIP 3.72 MBNJ-series -[EtherCAT]-DELTA R1-EC-series Slave Remote Module Connection GuideENPDF 2.22 MBNJ-series -[EtherCAT]-DENSO WAVE RC8Robot Controller Connection GuideENPDF 3.54 MBNJ-series -[EtherCAT]-E3NW-ECT DigitalSensor Communication UnitConnection GuideEN PDF 2.01 MBNJ-series -[EtherCAT]-E3X-ECTConnection GuideENPDF 2.41 MBNJ-series -[EtherCAT]-Elmo Gold Solo Whistle Digital Servo Drive Connection GuideEN ZIP 3.49 MBNJ-series -[EtherCAT]-FANUC R-30iB Robot Controller Connection GuideENPDF 3.82 MBNJ-series -[EtherCAT]-FESTO CPX-FB38 Valve Terminals MPA Connection GuideENPDF 2.47 MBNJ-series -[EtherCAT]-FESTO CTEU-EC Valve Terminals VTUB-12Connection GuideENPDF 2.52 MBNJ-series -[EtherCAT]-FESTO Valve Terminals MPA CPX-FB37Connection GuideENPDF 2.01 MBNJ-series -[EtherCAT]-FH-series Vision System Connection GuideENPDF 2.38 MBNJ-series -[EtherCAT]-FQ-MS12x(-M)-ECT Vision Sensor Connection GuideENPDF 2.63 MBNJ-series -[EtherCAT]-GRT1-ECT SmartSlice Connection GuideENPDF 2.9 MBNJ-series -[EtherCAT]-GX-ILM08C -[IO-Link]-Balluff Cylinder Sensor (BMF 203K)Connection GuideEN PDF 2.24 MBNJ-series -[EtherCAT]-GX-ILMxxx -[IO-Link]-E2E-series Proximity SensorConnection GuideEN PDF 2.31 MBNJ-series -[EtherCAT]-GX-ILMxxx -[IO-Link]-E3Z-series Photoelectric SensorConnection GuideEN PDF 2.24 MBNJ-series -[EtherCAT]-GX-series Analog I/O TerminalConnection GuideENPDF 1.74 MBNJ-series -[EtherCAT]-GX-series Digital I/O TerminalConnection GuideENPDF 1.74 MBNJ-series -[EtherCAT]-GX-series Encoder Input TerminalConnection GuideENPDF 1.75 MBNJ-series -[EtherCAT]-HENGSTLER ACURO(R)AC58-series Absolute EncoderConnection GuideENPDF 1.47 MBNJ-series -[EtherCAT]-HIWIN D1-N-series Connection GuideENZIP 3.85 MBNJ-series -[EtherCAT]-HMS Anybus Communicator Connection GuideENPDF 1.93 MBNJ-series -[EtherCAT]-HMS Anybus X-gateway Connection GuideENPDF 3.16 MBNJ-series -[EtherCAT]-HORIBA STEC SEC-Z500X-series Mass Flow ControllerConnection GuideEN PDF 1.5 MBNJ-series -[EtherCAT]-Hivertec HES-C400/NJ Connection GuideENPDF 2.14 MBNJ-series -[EtherCAT]-Hivertec HES-M4xx/NJ Connection GuideENPDF 1.89 MBNJ-series -[EtherCAT]-IAI ACON/ACON-CA/PCON/PCON-CA/DCON-CA ControllerConnection GuideEN PDF 1.38 MBNJ-series -[EtherCAT]-IAI Corporation MSCON Controller Connection GuideENPDF 2.88 MBNJ-series -[EtherCAT]-IAI Corporation MSEP Controller Connection GuideENPDF 1.48 MBNJ-series -[EtherCAT]-IAI SCON-CA/SCON-CAL Controller Connection GuideENPDF 2.12 MBNJ-series -[EtherCAT]-IAI X-SEL Controller XSEL-R/S/RX/SX/RXD/SXDConnection GuideEN PDF 2.67 MB NJ-series -[EtherCAT]-KYOWA SENERGYController (MotionLinxSeries)Connection GuideEN PDF 1.72 MBNJ-series -[EtherCAT]-M-System R30-seriesRemote I/OConnection GuideENPDF 1.74 MBNJ-series -[EtherCAT]-M-System R8-seriesRemote I/OConnection GuideENPDF 2.19 MBNJ-series -[EtherCAT]-MTS KG R-series LinearPosition SensorsConnection GuideENPDF 2.46 MBNJ-series -[EtherCAT]-NX-ECC + NX-ILM400 -[IO-Link]- E2E-seriesProximity SensorConnection GuideEN PDF 2.44 MBNJ-series -[EtherCAT]-NX-ECC + NX-ILM400 -[IO-Link]- E3Z-seriesPhotoelectric SensorConnection GuideEN PDF 2.5 MBNJ-series -[EtherCAT]-NX-ECC + NX-ILM400 -[IO-Link]- FESTO SFAW-series W Flow SensorConnection GuideEN PDF 2.62 MBNJ-series -[EtherCAT]-NX-ECC + NX-ILM400 -[IO-Link]- FESTO SPAE-Pressure SensorConnection GuideEN PDF 2.42 MBNJ-series -[EtherCAT]-NX-ECC + NX-ILM400 -[IO-Link]- FESTO VPPM-seriesConnection GuideENPDF 2.35 MBNJ-series -[EtherCAT]-NX-ECC + NX-ILM400 -[IO-Link]- Piab ABVac.EjectorpiCOMPACT23Connection GuideEN PDF 2.68 MBNJ-series -[EtherCAT]-NX-ECC + NX-ILM400 -[IO-Link]- Turck I/O Hub(TBIL)Connection GuideEN PDF 2.76 MBNJ-series -[EtherCAT]-NX-PG0122 -[Pulse]-ORIENTAL MOTOR RK IIStepping MotorConnection GuideEN ZIP 6.11 MBNJ-series -[EtherCAT]-NX-PG0122 -[Pulse]-ORIENTAL MOTORStepping Motor αSTEPConnection GuideEN ZIP 8.5 MBNJ-series -[EtherCAT]-ORIENTAL MOTORNETC01-ECT NetworkConverterConnection GuideEN PDF 2.96 MBNJ-series -[EtherCAT]-ORIENTAL MOTORaSTEP DC Multi-AxisDrive (AZDxA-KED)Connection GuideEN PDF 3.99 MBNJ-series -[EtherCAT]-PHOENIX CONTACTAXL E ECx Axioline EConnection GuideEN PDF 2.71 MBNJ-series -[EtherCAT]-PHOENIX CONTACTAxioline F-series I/OsystemConnection GuideEN PDF 2.07 MBNJ-series -[EtherCAT]-SANYO DENKISANMOTION R TYPE SConnection GuideEN ZIP 4.28 MBNJ-series -[EtherCAT]-SMC EX180-SEC5-X23xSI UnitConnection GuideEN PDF 2.04 MBNJ-series -[EtherCAT]-SMC EX260-SECx SIUnitConnection GuideEN PDF 2.14 MBNJ-series -[EtherCAT]-SMC EX600-SECx SIUnitConnection GuideENPDF 2.62 MBNJ-series -[EtherCAT]-SMC IN587 SI unitConnection GuideENPDF 2.27 MBNJ-series -[EtherCAT]-SMC JXCE1 Direct inputtype Step MotorControllerConnection GuideEN PDF 1.59 MBNJ-series -[EtherCAT]-THK Network Unit TNU-EC Electrical Actuator Controller Connection GuideEN PDF 2.28 MBNJ-series -[EtherCAT]-Turck BL20-E-GW-EC GatewayConnection GuideENPDF 2.13 MBNJ-series -[EtherCAT]-VAT612/615/642/650/652/951/952/62/67Control ValveConnection GuideEN PDF 2.91 MBNJ-series -[EtherCAT]-WAGO I/O-SYSTEM 750-series Fieldbus Coupler Connection GuideENPDF 2.55 MBNJ-series -[EtherCAT]-YASKAWA Σ-V-series SGDV-xxxxE1Connection GuideEN ZIP 6.95 MBNJ-series -[EtherCAT]-ZW-7000-seriesDisplacement Sensor Connection GuideENPDF 2.11 MBNJ-series -[EtherCAT]-ZW-CE1 Displacement SensorConnection GuideENPDF 1.98 MBNJ-series -[EtherNet/IP]-ABB IRC5 Robot Controller Connection GuideEN ZIP 6.44 MBNJ-series -[EtherNet/IP]-CJ2-series Controller Connection GuideENZIP 6.41 MBNJ-series -[EtherNet/IP]-CK3M-CPU1x1Connection GuideENPDF 3.93 MBNJ-series -[EtherNet/IP]-DENSO WAVE RC7M Robot Controller Connection GuideEN ZIP 3.83 MBNJ-series -[EtherNet/IP]-DENSO WAVE RC8Robot Controller Connection GuideEN ZIP 5.39 MBNJ-series -[EtherNet/IP]-FH-series Vision System Connection GuideENZIP 1.96 MBNJ-series -[EtherNet/IP]-FQ2-series Smart CameraConnection GuideEN ZIP 3.55 MBNJ-series -[EtherNet/IP]-FZ4-series Vision SensorConnection GuideENZIP 1.74 MBNJ-series -[EtherNet/IP]-FZ5-series Vision SystemConnection GuideEN ZIP 1.93 MBNJ-series -[EtherNet/IP]-IAI CorporationACON/PCON/DCON/SCON Controller Connection GuideEN ZIP 2.73 MBNJ-series -[EtherNet/IP]-IAI Corporation XSEL-Rx/Sx ControllerConnection GuideEN ZIP 4.93 MBNJ-series -[EtherNet/IP]-Nidec Sankyo SC5000-seriesConnection GuideENZIP 7.36 MBNJ-series -[EtherNet/IP]-Omron Adept Robot ePLCConnection GuideENZIP 2.47 MBNJ-series -[EtherNet/IP]-Omron Adept Robot ePLCIOConnection GuideEN ZIP 2.6 MBNJ-series -[EtherNet/IP]-PHOENIX CONTACT AXL E-series I/O DeviceConnection GuideEN ZIP 2.22 MBNJ-series -[EtherNet/IP]-SMC EX600-SENx SI UnitConnection GuideEN ZIP 2.59 MBNJ-series -[EtherNet/IP]-SMC JXC91 Step Motor ControllerConnection GuideEN PDF 2.1 MBNJ-series -[EtherNet/IP]-Seiko Epson RC180 Robot Controller Connection GuideENZIP 2.6 MB NJ-series -[EtherNet/IP]-Turck BL20-E-GW-ENMultiprotocol GatewayConnection GuideEN ZIP 2.21 MBNJ-series -[EtherNet/IP]-Turck TBEN-seriesCompact Block I/O-moduleConnection GuideENZIP 1.57 MBNJ-series -[EtherNet/IP]-V680S-series RFIDConnection GuideEN ZIP 2.28 MBNJ-series -[EtherNet/IP]-WAGO I/O-SYSTEM 750-series Ethernet FieldbusCouplerConnection GuideEN ZIP 2.44 MBNJ-series -[EtherNet/IP]-Yamaha Motor RCX-series Robot ControllerConnection GuideEN ZIP 3.98 MBNJ-series -[EtherNet/IP]-Yamaha Motor TS-seriesSingle-axis RobotControllerConnection GuideEN ZIP 5.84 MBNJ-series -[EtherNet/IP]-Yamaha RCX340 RobotControllerConnection GuideEN ZIP 4.75 MBNJ-series -[EtherNet/IP]-ZW-7000-seriesDisplacement SensorConnection GuideEN ZIP 2.52 MBNJ-series -[EtherNet/IP]-ZW-CE1 DisplacementSensorConnection GuideEN ZIP 4.26 MBNJ-series -[EthernetTCP/IP]- FQ-CR-seriesConnection GuideEN ZIP 3.11 MBNJ-series -[EthernetTCP/IP]- Janome SewingMachine JR3000-seriesRobotConnection GuideEN ZIP 1.85 MBNJ-series -[EthernetTCP/IP]- MARS TOHKEN2D Image Reader (MVF-300/500 Series)Connection GuideEN PDF 2.05 MBNJ-series -[EthernetTCP/IP]- SCHOTTMORITEX MLEF-seriesDigital ControllerConnection GuideEN ZIP 2.75 MBNJ-series -[EthernetTCP/IP]- V750-seriesRFID SystemConnection GuideEN ZIP 4.7 MBNJ-series -[EthernetTCP/IP]- ZW-seriesDisplacement SensorConnection GuideEN ZIP 4.35 MBNJ-series -[RS-232C]-G9SP Safety ControllerConnection GuideEN ZIP 4.5 MBNJ-series -[RS-232C]-V400-R2-series UltraSmall Multi-code ReaderConnection GuideEN ZIP 4.64 MBNJ-series -[RS-232C]-V500-R2-series FixedLaser-Type BarcodeReaderConnection GuideEN ZIP 4.71 MBNJ-series -[RS-232C]-V750-series RFIDSystemConnection GuideEN ZIP 5.11 MBNJ-series -[RS-232C]-ZW-series DisplacementSensorConnection GuideEN ZIP 4.68 MBNJ-series -[RS-485CompoWay/F]-E5CC/E5EC/E5ACDigital ControllerConnection GuideEN ZIP 4.71 MBNJ-series -[RS-485CompoWay/F]-KM1/KE1-seriesConnection GuideEN ZIP 5.4 MBNJ-series -[RS-485Modbus]- ORIENTALMOTOR BLE-seriesBrushless MotorConnection GuideEN ZIP 2.67 MBNJ-series -[RS-485 Modbus]- ORIENTAL MOTOR RK II-series Stepping MotorConnection GuideEN ZIP 5.5 MB NJ-series -[RS-485Modbus]- ORIENTALMOTOR αSTEP AR-seriesConnection GuideEN ZIP 2.83 MBNJ-series -[RS-485Modbus]- ORIENTALMOTOR αSTEP AZ-seriesConnection GuideEN ZIP 3.01 MBNJ/NX SeriesBrochureEN PDF 6.96 MBNJ/NX-Series CPU UnitBuilt-in EtherCAT PortUsers ManualENPDF 16.3 MBNJ/NX-Series CPU UnitBuilt-in EtherNet/IP PortUsers ManualEN PDF 13.4 MBNJ/NX-Series CPU UnitMotion ControlUsers ManualEN PDF 20 MBNJ/NX-Series CPU UnitSoftwareUsers ManualENPDF 22.3 MBNJ/NX-SeriesInstructionsReference ManualENPDF 16 MBNJ/NX-Series MotionControl InstructionsReference ManualENPDF 4.93 MBNJ/NX-Series OPC UACPU UnitsUsers ManualENPDF 3.73 MBNJ/NX-SeriesTroubleshooting ManualUsers ManualENPDF 16.4 MBNJ/NX-Series for MotionControlGetting Started GuideENPDF 18.1 MBNJ/NX-series -[EtherCAT]- CKDABSODEX driver(AX9000TS/TH-U5)Connection GuideEN PDF 1.73 MBNJ/NX-series -[EtherCAT]- HitachiADV-Series AC ServoDrivesConnection GuideEN ZIP 4.29 MBNJ/NX-series -[EtherCAT]- Inficongauge (BPG402-SE)Connection GuideEN PDF 1.22 MBNJ/NX-series -[EtherCAT]- KashiyamaDry Vacuum Pump (E-CAT01 1ch)Connection GuideENPDF 1.59 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-CKD Sensor (PPXseries)Connection GuideEN PDF 2.43 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-CKD Sensor (WFCseries)Connection GuideEN PDF 2.75 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-CKD WFK2 Flow sensorConnection GuideEN PDF 2.09 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-MTS Sensors (E-Series)Connection GuideEN PDF 2.4 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-PATLITE Beacon (NE-IL)Connection GuideEN PDF 2.02 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-PATLITE Tower (LR6-IL)Connection GuideEN PDF 2.08 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-SMC (ISA3-xxx)Connection GuideEN PDF 2.61 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-SMC (xSE20Bx-L(-M/-P)-x)Connection GuideEN PDF 2.13 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-SMC ITVx000/-IO*Connection GuideEN PDF 1.89 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-SMC Servo 24VDC(JXCL1)Connection GuideEN PDF 2.23 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-Schmalz Ejector (SCPSi)Connection GuideEN PDF 2.4 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-ifm (O5D10x/O5D15x)Connection GuideEN PDF 2.42 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-ifm (PN7x94)Connection GuideEN PDF 2.72 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-ifm (TN24xx)Connection GuideEN PDF 2.74 MBNJ/NX-series -[EtherCAT]- NX-ECC +NX-ILM400 -[IO-Link]-ifm TR7439 Pt100/1000Connection GuideEN PDF 2.43 MBNJ/NX-series -[EtherCAT]- NidecSankyo S-FLAG II SeriesAC Servo (DB6xx41)Connection GuideEN PDF 2.65 MBNJ/NX-series -[EtherCAT]- ORIENTAL MOTOR Stepper Motor(AZ-series)Connection GuideEN PDF 2.89 MBNJ/NX-series -[EtherCAT]- SANYO DENKI AC ServoSANMOTION R 3E MODEL TYPE SConnection GuideEN PDF 3.08 MBNJ/NX-series -[EtherCAT]- SANYODENKI AC ServoSANMOTION RADVANCED MODEL TYPE FConnection GuideEN PDF 3.61 MBNJ/NX-series -[EtherCAT]- SHIMADZU Power Unit for TurboMolecular Pump (TMP)Connection GuideEN PDF 1.29 MBNJ/NX-series -[EtherCAT]- SICK Absolute Encoder (AFS60/AFM60)Connection GuideEN PDF 1.52 MBNJ/NX-series -[EtherCAT]- Schmalz Compact Terminal(SCTSi-ECT)Connection GuideEN PDF 1.33 MB NJ/NX-series -[EtherCAT]- WeidmüllerRemote I/O System (u-remote IP20)Connection GuideEN PDF 1.8 MBNJ/NX-series -[EtherCAT]- YASKAWA Σ-7-seriesConnection GuideEN ZIP 3.77 MBNJ/NX-series -[EtherNet/IP]- Balluff BNI EIP-50x-105-Z015Connection GuideEN PDF 3.35 MBNJ/NX-series -[EtherNet/IP]- CKD ABSODEX Driver (AX9000TS/TH-U6)Connection GuideEN PDF 1.71 MBNJ/NX-series -[EtherNet/IP]- HMSAnybus Communicator Connection GuideEN PDF 1.51 MBNJ/NX-series -[EtherNet/IP]- Hilscher netTAP NT100 Gateway (NT 100-RE-DN)Connection GuideEN PDF 3.5 MBNJ/NX-series -[EtherNet/IP]- IAI RCON system & MCON /MSCON / MSEP ControllerConnection GuideEN PDF 1.9 MBNJ/NX-series -[EtherNet/IP]- KOGANEI Manifold Solenoid Valve (F Series)Connection GuideEN PDF 2.43 MBNJ/NX-series -[EtherNet/IP]- Nordson ProBlue Adhesive MeltersConnection GuideEN PDF 2.61 MBNJ/NX-series -[EtherNet/IP]- ORIENTAL MOTOR αSTEP Compatible Driver (AZD-xEP)Connection GuideEN PDF 1.82 MB NJ/NX-series -[EtherNet/IP]- SMCSolenoid Valve (SI UnitEX260-SEN#)Connection GuideEN PDF 1.65 MBNJ/NX-series -[EtherNet/IP]- SchmalzK.K. Compact Terminal(SCTSi-EIP)Connection GuideEN PDF 1.69 MBNJ/NX-series -[EtherNet/IP]- ifm IO-Link master (AL1322)Connection GuideEN PDF 3.18 MBNJ/NX-series -[EtherNet/IP]- ifm IO-Link master (AL1920)Connection GuideENPDF 3.07 MBNJ/NX-seriesInstructions ReferenceReference ManualENPDF 67.9 MBNJ/NX-series MachineAutomation ControllerBrochureENPDF 1.95 MBNJ/NX-series MachineAutomation ControllerDatabase ConnectionCPU UnitBrochureEN PDF 1.24 MBNJ/NX/NY-seriesSysmac Library User’sManual for SafetySystem Monitor LibraryUsers ManualEN PDF 922 KBOmron GX-JC0x-xEtherCAT Junction BoxEtherCAT ESI fileENZIP 3.36 KBRedundancy and MotionSafetyFlyerENPDF 960 KBSysmacCatalogueEN PDF 43.5 MBSysmac CNCBrochureEN PDF 1.07 MBSysmac StudioOperation ManualEN PDF 65.9 MBSysmac: A FullyIntegrated PlatformBrochureENPDF 9.22 MB。
PLC实验指导书
二 实验报告基本要求
1、在学校统一印制的实验报告用纸上书写报告。 2、书写整洁,符号、表格和曲线规范。 3、实验记录数据真实客观,实验结果分析认真正确。 4、按时提交实验报告。
目
录
电机及自动控制教学实验台简介............................................................. 1 实验 1、可编程控制器基本指令实验.................................................... 14 实验 2、自动售货机的模拟控制............................................................ 16 实验 3、液体混合的模拟控制................................................................ 19 实验 4、运料小车的模拟控制................................................................ 23 实验 5、水塔水位的模拟控制................................................................ 35 实验 6、四节传送带的模拟控制............................................................ 39 实验 7、机械手的模拟控制.................................................................... 42 实验 8、交通灯的模拟控制.................................................................... 46 实验 9、数码显示的模拟控制................................................................ 49 实验 10、装配流水线的模拟控制.......................................................... 53 实验 11、邮件分拣的模拟控制.............................................................. 58 实验 12、轧钢机的模拟控制.................................................................. 63 实验 13、喷泉的模拟控制...................................................................... 67 实验 14、舞台灯光的模拟控制.............................................................. 70 实验 15、加工中心模拟实验.................................................................. 74
OMRON光电传感器操作手册
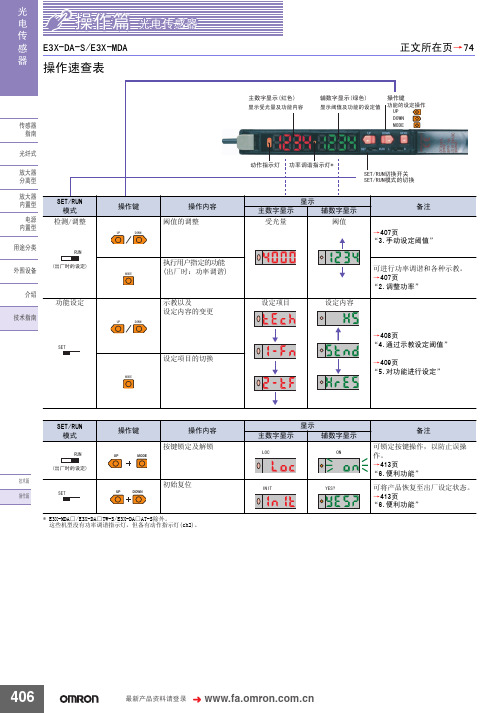
䗝ᢽᖂߚ䖍㓬 ऩջ䖍㓬˖ǃϸջ䖍㓬˖ 䗝ᢽᖂߚࡼᯊ ᖂߚડᑨᯊ䯈 ऩջ䖍㓬ĂõV˖ǃµV˖ǃPV˖ǃPV˖ǃPV˖ ϸջ䖍㓬ĂõV˖ǃµV˖ǃPV˖ǃPV˖ǃPV˖ $7&䫭䇃䕧ߎ˖ ҙ$7&ൟ ᣝ䗮䘧䕧ߎ˖ǃ ফܝㄝ㑻Ͼ䯜ؐП䯈ᯊ䕧ߎ˖ 㞾䆞ᮁ䕧ߎ˖ $7&ࡳ㛑᳝ᬜ˖ǃ $7&ࡳ㛑᮴ᬜ˖ ᮴䆒ᅮ˖ǃ$7&ⱘᓔྟ໘⧚˖ǃ ࡳ⥛䇗䇤ˇ$7&ⱘᓔྟ໘⧚˖
581
䆒ᅮ㒧ᴳৢˈ䖨ಲࠄ ᪡ࠡⱘᰒ冫
581
㟇581
㟇581
408
᳔ᮄѻક䌘᭭䇋ⱏᔩ
᪡㆛⬉ܝӴᛳ఼
ܝ ⬉ Ӵ ᛳ ఼
䆒ᅮࡳ㛑 6(7ᓣ
䗮⫼gᷛ䆚Ẕ⌟ൟ
(;'$ƶ6
ࡳ㛑ߛᤶᯊ᠔ᰒ冫ⱘݙᆍЎߎॖᯊⱘ䆒㕂DŽ ḍ䆒ᅮⱘݙᆍˈࡳ㛑ߛᤶЁৃ㛑Ӯࡴᮄⱘ乍ⳂDŽ
℆581⢊ᗕϟߛᤶᓣᯊ
ঠ䕧ߎ
℆ߛᤶϾ䗮䘧ⱘ䕧ߎݙᆍᯊ
⫼䗨ߚ㉏ ೈ䆒 ҟ㒡 ᡔᴃᣛफ
℆ߛᤶ$7&ࡳ㛑᳝ᬜ᮴ᬜᯊ
ҙ$7&ൟ 䆒ᅮᅠ៤ৢ
ᇚ6(7581ߛᤶᓔ݇䆒Ў 581 DŽ
581
ࡳ㛑ϔ㾜 াࣙᣀҢ䗮⫼ൟᓔྟᮄⱘࡳ㛑DŽᴀࡳ㛑䚼ߚ䇋খ䯙䗮⫼ൟDŽ
83 '2:1
䗮䖛Āߛᤶᰒ冫āࡳ㛑ᬍᰒ冫ᮍ⊩ᯊˈ䗮䖛䬂᪡ᇚ䕙ࡽ᭄ᄫᰒ冫 ߛᤶЎ䯜ؐDŽ
ᡔᴃ㆛ ᪡㆛
䆶⬉䆱800-820-4535
407
ܝ ⬉ Ӵ ᛳ ఼
᪡㆛⬉ܝӴᛳ఼
䗮䖛冫ᬭ䆒ᅮ䯜ؐ 6(7ᓣ
冫ᬭⱘᮍ⊩ˈ᳝བϟಯ辵DŽՓ⫼ᯊ䇋䗝ᢽ᳔ড়䗖ⱘᮍ⊩DŽ 581ᓣϟг㛑䖯㸠冫ᬭ ҙᎹӊ᳝᮴冫ᬭǃ㞾ࡼ冫ᬭ DŽ ᪡ᮍ⊩䇋খ䯙ѻક䰘ᏺⱘĀՓ⫼䇈ᯢкāDŽ ᔧ䕙ࡽ᭄ᄫᰒ冫ߎ⦄Ā29(5āǃĀ/2āǃĀ1($5āᯊˈ㸼冫ߎ䫭DŽ 䇋䞡ᮄ䇗㡖ᑊ䆒ᅮDŽ
OMRON40 实验指导(CP1E-40 可编程序控制器原理及应用)
可编程序控制器原理及应用实验指导书(OMRON-CP1E)目录PC可编程序控制器简介 (2)第一章可编程控制器的基本原理 (2)第二章可编程序控制器的编程 (6)实验项目 (8)实验一艺术灯控制实验 (8)实验二交通灯控制 (10)实验三液体混合装置自动控制 (12)实验四 LED数码管控制 (14)实验五步进电机控制 (16)实验六四级传送带控制 (18)实验七机械手自动控制 (20)实验八邮件分拣控制 (22)实验九水塔水位控制 (24)实验十电机Y/△起动控制 (26)实验十一刀库捷径选择控制 (28)实验十二四层电梯控制 (30)PC可编程序控制器简介可编程序控制器(Programmable Controller)简称PC,但在我国一部分技术人员为了与个人计算机(Personal Computer 简称PC)区别开来,仍把可编程序控制器简称为PLC,也有简称PC的,本指导书中简称PC。
PC它是以微处理器为核心的工业通用自动控制装置。
它具有控制能力强、使用方便灵活、小型化、可靠性高、易于扩展、通用性强等优点。
它不仅可以取代传统的继电器控制系统,还可以进行复杂的生产过程控制和应用于工厂自动化网络。
目前在工业发达国家里,PC应用相当广泛,尤其是小型PC,采用类似继电器逻辑的过程操作语言,使用十分方便,简单易学,备受工厂电气及工程技术人员的欢迎。
普及PC技术,推广应用可编程序控制器,加速我国企业的技术进步和设备改造,开始新型的机电一体化产品,对提高我国的工业自动化水平和生产效率有很重要的意义。
为了配合PC技术在我国的广泛推广,满足大专院校、以及各类职业技术学校开设相关课程的实验要求,我厂工程技术人员根据用户的需要,最新研制出新型PC实验台。
该实验台针对目前市场上已有的同类产品扬长补短、优化创新、从而具有功能完备、操作方便、造型美观等特点。
该设备依据我国目前高等院校机电、电气类课程的实验要求精心设计,实验项目完整丰富,与课堂教学紧密结合,因此具有极高的性价比。
OMRON CP1H PLC实验

实验一硬件的认识与CP-X软件的应用一、实验目的1、认识PLC实物,掌握PLC各部分硬件的作用。
2、掌握PLC电源接线的方法。
3、学会CP-X软件的应用。
二、实验设备电脑一台,可编程控制控制器综合实验箱一台(在本书中简称为实验箱),AB接口的USB连线一条,电源线两条。
实验箱介绍:如图1-1所示的实验箱是编者所在的学校自行研制的,它的核心部件是采用新型的OMRON CP1H PLC,输入电路有24点/1公共端、输出电路有16点/6公共端;其次是触摸屏,通过R232端口与PLC进行通讯,可作PLC的编程器用。
实验箱下方提供了三组信号的输入方式:第一组是24个输入端的拨动开关,拨动开关向上,相应的端子有电信号输入,反之则相应的端子无信号输入;第二组是6个输入端的按钮开关,按钮按下,相应的端子有电信号输入,放开则断开;第三组是输入接线端子,这组可让学生根据实验的需要自己接线。
实验箱的最上方是输出接线端子,可连接电气元件或负载。
三、实验步骤图1-1 PLC实验箱1、在PLC实验箱没有通电的情况下,打开实验箱盖,根据图1-2和图1-3所示,在实验老师的指导来认识OMRON-CP1H PLC的基本组成;在了解硬件的过程中要注意各个标注的意义,如在上部端子左边有标注:IN和AC100-200V。
图1-2 PLC正面图图1-3 PLC侧面图2、在认识PLC硬件的基础上学会PLC的外部接线方法。
(1)上部端子的接线:明确哪两个端子是用来接外部交流电及其电压范围;明确PLC信号输入端子0CH~1CH和COM所用的电源是24V的直流电源。
(2)下部端子的接线:明确继电器输出型的端子的最大开关能力是多少;根据实验的需要,确定哪几个输出端子要共用一个公共端,公共端与输出端子间所接的电源有没有在开关能力的允许范围内。
(3)认真观察PLC实验箱的电源接线,画出PLC实验箱的电源接线图。
3、把实验箱的电源及各个输入端的拨动按钮置于“OFF”位,即向下,再用AB 接口的USB连线把PLC与电脑连接起来,然后给PLC上电。
《可编程控制器及应用》实验指导书

本实验指导书可供自动化或相近专业的学生使用。
本实验指导书在编写过程中,得到院全体老师和实验室老师的帮助,在此谨致衷心的感谢。由于水平有限,不足与失误在所难免,将在使用中不断进行补充与修改,更希望得到宝贵意见和建议。
1).键盘
由39个键组成,键盘的上部为指令键,下部左侧为数字键,下部右侧为编辑键。各键的功能如下:
(1)功能键FUN配合数字键可输人有功能码的指令。例如输人MOV指令时;依次按下FUN、2、l键时,即显示出MOV(21)指令。
(2)用SFT、NOT、AND、OR、LD、OUT、CNT、TIM键可直接输人相应的基本指令。
实验十二交流电动机的Y/△形启动PLC控制实验……………………………
前
《可编程序控制器技术》课程,是一门实践性很强的技术课程,要使学生学习好本门课,除在课堂上和书本中做基本的理论知识学习外,上机实验是必不可少的一个掌握该技术的学习环节。根据教学要求,我们特编写了此《可编程控制器及应用实验指导书》一书,与理论课程的教学配套使用。
⑤“DUPL”表示重复。当前使用的子程序编号或JME编号在程序中已使用过,应改正程序,使用不同的编号。
⑥“SBN UNDEFD”表示调用的子程序不存在。
⑦“JME UNDEFD”表示一个转移程序段有首无尾,即对于一个给出的JME没有相应的JMP与之对应。P型机的JMP—JME不带编号,不存在这一类错误。
要特别注意的是,当主机没接编程器等外围设备时,通电后PLC自动处于运行方式。因此在对PLC中的用户程序不了解时,一定要把主机的方式选择开关置于编程位置,避免通电后就运行程序而造成事故。当主机接有编程器时,通电后的工作方式取决于编程器工作方式选择开关的位置。
OMRON实验指导书-六个(精)

实验指导书实验一:基本指令训练一、实验目的1、熟悉OMRON系列PLC编程软件CX-Programmer的操作;2、熟悉基本逻辑指令,定时、计数指令,分支、跳转、暂存指令,移位、锁存、微分指令,数据运算指令的应用。
二、实验原理图三、实验步骤1、按实验箱上程序的要求接好电路(接线图见附图。
在编程软件上编制程序,下载到PLC中,操作并观察程序执行情况。
2、设计一抢答器程序并进行运行调试。
设计要求如下:参加智力竞赛的A、B、C三人的桌上各有一只抢答按钮,分别为SBl (001、SB2(002和SB3(003,用3盏灯Ll~L3(1001、1002、1003显示他们的抢答信号。
当主持人接通抢答允许开关SA1(000后抢答开始,最先按下按钮的抢答者对应的灯亮,与此同时,应禁止另外两个抢答者的灯亮,指示灯在主持人按下复位开关SA2(0004后熄灭。
3、用(000端作输入控制,将(1000~1005分别接对应的输出端,利用分支指令编程,使000=“1”时(1000~1002对应的灯以1s的周期轮流闪烁10s;000=“0”时(1003~1005对应的灯轮流闪烁10s后自动循环。
再用跳转指令实现上述过程,比较程序执行情况。
4、将(000~005接对应的输入端,(1000、1001、1002接对应的输出端。
用开关设定(000~005的状态作为数据输入,并用传送指令将其传送至内部通道并与一给定数值35(BCD码比较,将比较结果通过(1000、1001、1002对应的灯显示。
四、实验报告要求1、写出I/O分配表、梯形图程序、指令表程序;2、通过编程软件输入相关指令的梯形图程序,观察指令执行情况,认真记录实验中发现的问题、错误、故障及解决方法;3、编写实验报告。
实验二:电动机的星形-三角形控制在三相异步电动机Y/Δ换接启动模拟控制实验区完成本实验,实验接线参见附图。
在电机进行正反向的转、换接时,有可能因为电动机容量较大或操作不当等原因使接触器主触头产生较为严重的起弧现象,如果在电弧还未完全熄灭时,反转的接触器就闭合,则会造成电源相间短路。
实验指导书修订版
《可编程控制器》实验指导书实验课程类别:课程内实验实验课程性质:必修适用专业:自动化适用课程:《可编程控制器》、《电气控制与PLC》实验用PLC机型:欧姆龙CPM1A和CPM2A开课院、系及教研室:电气信息学院自动化及电气工程教研室PLC硬件的连接和软件的使用1.PLC实验系统硬件的组成和线路的连接整个实验系统由PLC系统和实验区组成。
PLC系统包括OMRON型PLC主机CPM1A一台、适配器CPM1-CIFO1一个、串口线一根(包括9芯针、孔接头各一个)。
实验区包括开关量输入区、混料实验区、交通灯实验区、电机控制实验区和电梯(直线)实验区等,每个实验区有不同的输入按键、指示灯和相应的插孔。
另外,实验面板上还有一排输入端子排DIGITAL INPUT 00~23、公共端子接实验箱的1M、2M、3M、4M;输出端子排DIGITAL OUTPUT 00~15,公共端子接实验箱的1L、2L;另有插接线若干。
开关量信号单元介绍:输入信号分为不带自锁按键和带自锁按键,各有8个,共16个,按键按下时是高电平还是低电平由公共端决定,不带自锁按钮的公共端是COMS1,带自锁按键的公共端是COMS2。
输出信号是2组输出指示灯和一个蜂鸣器声音信号,其中一组指示灯的信号是低电平点亮,标示为LED1-LED4,另一组指示灯的信号是高电平点亮,标示为LED5-LED8。
声音信号的接口标示为BEEP,接通低电平信号时蜂鸣器响。
具体线路的连接如下:(1)电源开关下的两根线为220V电源线,与PLC主机的L1和L2相连。
(2)PLC输入端的0CH(0通道)00~11端子分别与实验面板上端子排的INPUT00~11相连,1CH(1通道)00~05端子分别与实验面板上端子排的INPUT12~17相连。
(3)PLC输出端的10CH(输出0通道)00~07端子分别与实验面板上端子排的OUTPUT00~07相连,11CH(1通道)00~03端子分别与实验面板上端子排的OUTPUT10~13相连。
新PLC实验指导书

可编程序控制器原理及应用实验指导书余瑾、姚燕编写北京邮电大学自动化学院OMRON 可编程控制器介绍输入输出端子区输入、输出端子区在实验板的左侧,由长方型DC3插座和与I/O点编号对应的自锁紧台阶插座构成。
长方型DC3插座与I/O点台阶插座之间接线已在线路板下面连好。
通过扁平线电缆,将可编程序控制器的输入和输出端子,全部引入到实验设备的电源和I/O点台阶插座上。
电缆线冷压端子的分布是为了更换机型时接线方便而统筹考虑的。
如果用户机型已确定,为了避免误接或短路电路,可舍去多余端子。
公共端子较多的需用导线相互连接。
冷压端子与可编程序控制器端子相连接时,应参考下面接线原理图及表1、表2接线。
1.输入端子接线原理图可编程序控制器输入端子端↓(工作电源端子)↓┌─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬─┬──┬──┬│0│1│2│3│4│5│6│7│8│9│10│11│COM│黄│黄│黄│黄│黄│黄│黄│黄│黄│黄│黄│黄│红││││││││││││││││││扁平电缆线││││(1)│◎◎◎◎◎◎◎◎◎◎◎◎◎│││││││││││││○┃○┃○┃○┃○┃○┃○┃○┃○┃○┃○┃○┃│○┃○┃○┃○┃○┃○┃○┃○┃○┃○┃○┃○┃┴││││││││││││┯└─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴─┴──┴─输入信号公共端实验设备端的24V电源↑(1)端红线接C20P、C20H、CPM1A等机型输入公共端子COM上。
2. 输出端子接线原理图实验设备端实验箱内负载用直流5V电源负载公共端-+┌──┬──┬──┬──┬──┬──┬──┬○○┌┴┐┌┴┐┌┴┐┌┴┐┌┴┐┌┴┐┌┴┐┌┴┐│└┬┘└┬┘└┬┘└┬┘└┬┘└┬┘└┬┘└┬┘│◎◎◎◎◎◎◎◎◎◎◎││││扁平电缆线│││││││││││││││││││黄│黄│黄│黄│黄│黄│黄│黄│红┌─┼┬─┼┬─┼┬─┼┬─┼┬─┼┬─┼┬─┼┬─┼┬─┼┬─┼┐│+│- │0 │ 1 │ 2 │ 3 │ 4 │ 5 │ 6 │7 │COM │└──┴──┴──┴──┴──┴──┴──┴──┴──┴──┴──┘(工作电源端子) 可编程序控制器输出端子实验箱介绍随着微处理器、计算机和数字通信技术的快速发展,我公司推出一系列相关产品,EL-PLC-III型箱式PLC教学实验系统是融PLC、微机控制和上位机监控为一体的综合性实验系统,取代以往旧式的手持式编程器,采用基于个人计算机的编程软件,在控制对象方面,既有抽象的模型,又有生动具体的机构运转,教学实验方便,效果好,性能价格比高。
机器人技术实验指导书
工业机器人实验指导书实验一、工业机器人的安装与调试一、实验学时:2学时二、实验目的:1、学习并掌握六自由度工业机器人的结构特点。
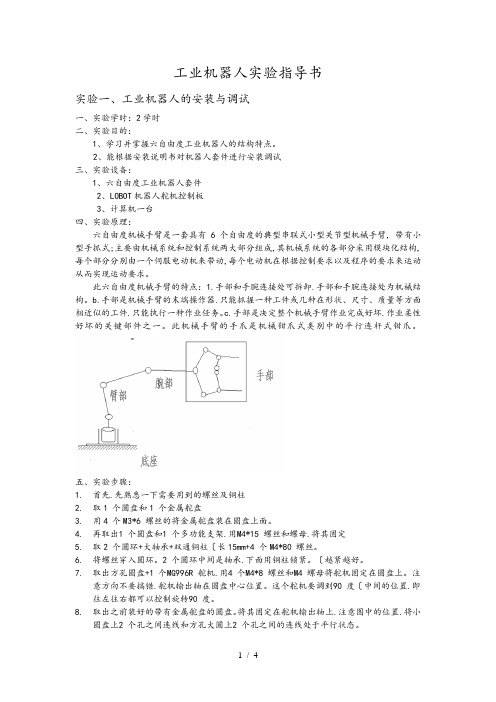
2、能根据安装说明书对机器人套件进行安装调试三、实验设备:1、六自由度工业机器人套件2、LOBOT机器人舵机控制板3、计算机一台四、实验原理:六自由度机械手臂是一套具有6个自由度的典型串联式小型关节型机械手臂, 带有小型手抓式;主要由机械系统和控制系统两大部分组成,其机械系统的各部分采用模块化结构,每个部分分别由一个伺服电动机来带动,每个电动机在根据控制要求以及程序的要求来运动从而实现运动要求。
此六自由度机械手臂的特点:1.手部和手腕连接处可拆卸.手部和手腕连接处为机械结构。
b.手部是机械手臂的末端操作器.只能抓握一种工件或几种在形状、尺寸、质量等方面相近似的工件.只能执行一种作业任务。
c.手部是决定整个机械手臂作业完成好坏.作业柔性好坏的关键部件之一。
此机械手臂的手爪是机械钳爪式类别中的平行连杆式钳爪。
五、实验步骤:1.首先.先熟悉一下需要用到的螺丝及铜柱2.取1 个圆盘和1 个金属舵盘3.用4 个M3*6 螺丝的将金属舵盘装在圆盘上面。
4.再取出1 个圆盘和1 个多功能支架.用M4*15 螺丝和螺母.将其固定5.取2 个圆环+大轴承+双通铜柱〔长15mm+4 个M4*80 螺丝。
6.将螺丝穿入圆环。
2 个圆环中间是轴承.下面用铜柱锁紧。
〔越紧越好。
7.取出方孔圆盘+1 个MG996R 舵机.用4 个M4*8 螺丝和M4 螺母将舵机固定在圆盘上。
注意方向不要搞错.舵机输出轴在圆盘中心位置。
这个舵机要调到90 度〔中间的位置.即往左往右都可以控制旋转90 度。
8.取出之前装好的带有金属舵盘的圆盘。
将其固定在舵机输出轴上.注意图中的位置.将小圆盘上2 个孔之间连线和方孔大圆上2 个孔之间的连线处于平行状态。
9.将之前装好的这两个部分.连到一起10.方孔大圆盘下面用M4 螺母锁紧。
OMRON使用说明书

目录1、概述 (1)2、测量原理 (1)3、技术参数 (1)4、选型指南 (2)5、安装方法和步骤 (4)6、信号线连接 (11)7、传感器调试 (11)8、故障排除 (11)9、智能流量积算仪 (12)10、无线远程流量监测系统 (14)11、后备电源 (14)12、壁挂式仪表箱 (14)13、型号编制说明 (16)14、涡街流量计操作指南 (17)11. 概述应力式涡街流量计是速度式流量计的一种,它以卡门涡街理论为基础,采用压电晶体检测流体通过管道内三角柱时所产生的旋涡频率,从而测量出流体的流量。
涡街流量计广泛应用于石油、化工、轻工、动力供热等行业。
涡街流量计具有以下特点:测量精度高,量程宽;测量介质广泛,可测量液体、气体和蒸汽;工作温度高,介质温度可达350℃;无运动部件,无磨损,可靠性高;表体采用不锈钢材料,耐腐蚀。
2. 测量原理当管道中流体介质通过旋涡发生体(三角柱)时,由于局部流速加速而产生旋涡现象(如图一),此旋涡分成两列交替地出现,这种旋涡列被称为卡门涡街。
卡门涡街的释放频率与三角柱宽度尺寸和流体的流动速度有关,而与介质的温度、压力等特性参数无关。
可用下式表示:f=S t V/d (1)式中:f—卡门涡街的释放频率S t—斯特罗哈尔(Strouhal)数V—介质流速d—三角柱的宽度斯特罗哈尔数是涡街流量计的重要参数,它只与介质的雷诺数Re有关。
只要管道内介质的雷诺数保持在2×104至7×106范围内,斯特罗哈尔数St便保持为一个常数,这样,便可通过测量旋涡频率信号检测出流体介质的流速,再通过介质的流速计算出介质的流量。
3. 技术参数◆公称口径:DN15、DN20、DN25、DN32、DN40、DN50、DN65、DN80、DN100、DN125、DN150、DN200、DN250、DN300、DN350、DN400、DN450、DN500;◆适用范围:气体(空气、氧气、氮气、煤气、天燃气、化学气体等)、液体(水、高温水、油、食品液、化学液等)、蒸汽(饱和蒸汽、过热蒸汽);◆可测介质温度:-40℃~280℃,-40℃~350℃;◆公称压力:≤1.6MPa ≤2.5MPa ≤4Mpa;◆精度等级:液体0.5级、气体、蒸汽1.0级;◆流速范围:液体0.6-6 m/s,气体:5-60m/s,蒸汽:5-70m/s;◆测量范围:见表一、表二;◆输出信号:电压脉冲:低电平≤1V,高电平≥6V,脉冲宽0.4ms,负载电阻>150Ω;标准电流:4-20mA,转换精度±0.5%满度值,负载电阻24V-500Ω,现场液晶显示:瞬时流量5位显示(m3/h、kg/h、t/h),转换精度±0.1%;累积流量9位显示(m3、kg、t),转换精度±0.1%;2◆供电电源:电压脉冲输出时:+12VDC,4-20mA输出时:+24VDC;现场液晶显示:3.6V 5号1节锂电池供电,使用寿命大于2年;◆环境温度:电压脉冲输出:-30℃—+65℃;4-20mA输出:-10℃—+55℃;现场液晶显示:-25℃—+55℃;◆表体材料:不锈钢(其他材料协议供货)。
变频调速实训指导书(欧姆龙)
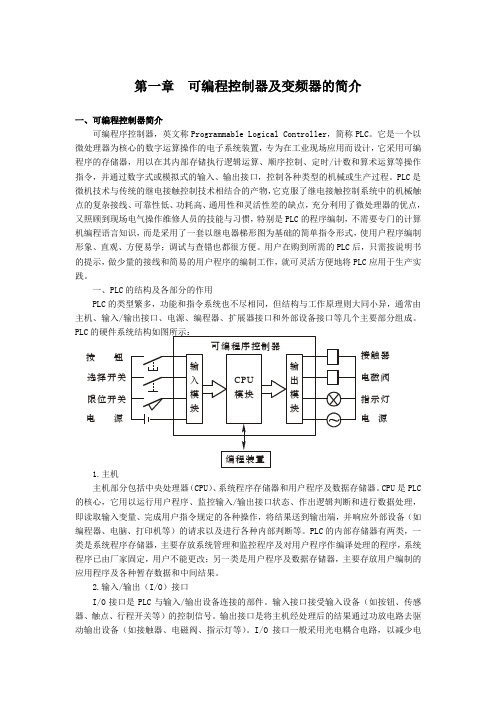
第一章 可编程控制器及变频器的简介一、可编程控制器简介可编程序控制器,英文称Programmable Logical Controller ,简称PLC 。
它是一个以微处理器为核心的数字运算操作的电子系统装置,专为在工业现场应用而设计,它采用可编程序的存储器,用以在其内部存储执行逻辑运算、顺序控制、定时/计数和算术运算等操作指令,并通过数字式或模拟式的输入、输出接口,控制各种类型的机械或生产过程。
PLC 是微机技术与传统的继电接触控制技术相结合的产物,它克服了继电接触控制系统中的机械触点的复杂接线、可靠性低、功耗高、通用性和灵活性差的缺点,充分利用了微处理器的优点,又照顾到现场电气操作维修人员的技能与习惯,特别是PLC 的程序编制,不需要专门的计算机编程语言知识,而是采用了一套以继电器梯形图为基础的简单指令形式,使用户程序编制形象、直观、方便易学;调试与查错也都很方便。
用户在购到所需的PLC 后,只需按说明书的提示,做少量的接线和简易的用户程序的编制工作,就可灵活方便地将PLC 应用于生产实践。
一、PLC 的结构及各部分的作用PLC 的类型繁多,功能和指令系统也不尽相同,但结构与工作原理则大同小异,通常由主机、输入/输出接口、电源、编程器、扩展器接口和外部设备接口等几个主要部分组成。
PLC1.主机主机部分包括中央处理器(CPU )、系统程序存储器和用户程序及数据存储器。
CPU 是PLC 的核心,它用以运行用户程序、监控输入/输出接口状态、作出逻辑判断和进行数据处理,即读取输入变量、完成用户指令规定的各种操作,将结果送到输出端,并响应外部设备(如编程器、电脑、打印机等)的请求以及进行各种内部判断等。
PLC 的内部存储器有两类,一类是系统程序存储器,主要存放系统管理和监控程序及对用户程序作编译处理的程序,系统程序已由厂家固定,用户不能更改;另一类是用户程序及数据存储器,主要存放用户编制的应用程序及各种暂存数据和中间结果。
OMRON电子血压计使用说明书

O M R O N电子血压计使用说明书(总11页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除1 如何获得血压计的读数概要此款OMRON MX3 Plus电子血压计不适合去测量心脏跳动的频率。
怀孕期间、脉搏无规律和动脉异常等类似影响测量的,请求教你的医生。
测量前避免吃饭、饮酒、吸烟、运动和洗澡。
测量前和测量中应保持平静、放松。
你决不能不听从医生的吩咐而改变所服用的药剂剂量。
将此款血压计保存于温度–20℃至60℃之间的干燥、封闭的地方。
如果3个月或更长时间不使用,请将所有电池从电子血压计中取出。
使用时的劝告一天至少检查你的血压两次(早餐前、工作后)。
当你在车上时,不要测量你的血压。
请始终在同一个手臂上测量血压。
在测量前,将“布袖口”缠好在手臂上。
警告使用环境温度在10℃至40℃。
使用中避免剧烈振动、撞击、磁场、电器干扰及其它。
不可在强烈日光下测量。
测量期间与移动电话保持至少5米远。
1不要将“布袖口”缠绕在除手臂之外的其它物品上。
不要将“布袖口”和管子折叠。
不要将OMRON MX3 Plus血压计摔落。
2 视图A 显示屏B 记忆按钮C 开始按钮D 开关按钮E 交流电源插口F 布袖口G 气管 H 气管插头 J 电池盒 K 气管插口3 准备工作⑴滑开电池盖。
⑵按照图示插四节电池进电池盒,并合上电池盒。
注意!必须是四节相同的AALR6 1.5V碱性电池!连接布袖口使布袖口缠绕好注意!当布袖口没有缠绕好手臂时,不要使布袖口膨2胀!如上图,将H(气管插头)插入K(气管插口)⑴除去手臂上衣物注意!卷起袖子时,切勿压迫血液流动!⑵将布袖口一端穿过H(金属环)注意!不要将气管裹入⑶手臂穿过布袖口布袖口内!注意!如测量左臂,使气管与手臂、中指保持平行!如上图;如测量右臂,则将气管与右手的小手指保持平行!如左图。
布袖口下端与肘关节保持1至2厘米!⑷捏住布袖口末端,将它绕在手臂上,如左图。
实验指导书plc(学生)

实验须知一、预习应事先预习,以免因准备不充分而影响实验实训的顺利进行。
预习内容一般包括:(1) 本次实验实训所用设备、仪器或软件的使用方法。
(2) 实验实训指导书中与本次实验有关的章节。
(3) 与本次实验实训有关的原理及操作要领等。
二、实验注意事项实验实训过程中应注意:(1) 提前5分钟进入实验室,不得迟到、早退。
(2) 实验前应认真听指导老师讲解。
(3) 实验中要细心,爱护设备仪器,注意人身安全、设备安全。
(4) 认真观察,记录实验数据或曲线。
(5) 实验结束后,将设备整理好,并将结果交指导老师检查。
详细填写。
实验实训记录本,由指导老师签字,且检查设备完好后,方可离开实验实训室。
三、实验报告应认真独立按期完成实验报告,并及时上交指导老师批改。
报告内容包括:(1) 实验名称、实验内容、简要步骤、梯形图及重要参数。
(2) 实验结果分析,并应附有实验实训结果(如曲线、参数、时序等)。
(3) 对实验中遇到的问题进行分析说明。
(4) 思考题简明解答。
第一部分可编程控制器的概述可编程序控制器(Programmable Logical Controller,简称PLC)是一个以微处理器为核心的数字运算操作的电子系统装置,专为在工业现场应用而设计。
它采用可编程序的存储器,用以在其内部存储执行逻辑运算、顺序控制、定时/计数和算术运算等操作指令,并通过数字式或模拟式的输入、输出接口,控制各种类型的机械或生产过程。
PLC是微机技术与传统的继电接触控制技术相结合的产物。
用户程序编制形象、直观、方便易学;调试与查错也都很方便。
一、可编程控制器的基本结构可编程控制器主要由CPU模块、输入模块、输出模块和编程器组成(如下图所示)。
本实验装置选用CPU型号为S7-200系列的主机。
二、可编程控制器的工作原理PLC采用循环扫描的工作方式,工作过程通常分五个阶段:内部处理、通信处理、输入处理、程序执行、输出处理,具体工作流程如右图所示。
欧姆龙PLC实验实例及《可编程序控制器(PLC)》实训指导书

0
正转信号按钮
直线区 任选
1
反转信号按钮
2
停止信号按钮
直线区 任选 直线区 任选
输出信号 控制对象及作用 元件或端子位置
0
电机正转
旋转区正转端子
1
电机反转
旋转区反转端子
(4) 小车直线行驶正反向自动往返控制 I/O 分配:
输入信号 信号元件及作用 元件或端子位置
0
停止信号按钮
直线区 任选
偶数次灯灭。
(4)单按钮双路单通输出控制
用一只按钮控制二盏灯,第一次按下时第一盏灯亮,第二次按下时第一盏灯灭,同
时第二盏灯亮,第三次按下时两盏灯灭,……以此规律循环下去。
(5)单按钮双路单双通输出控制 用一只按钮控制二盏灯,,第一次按下时第一盏灯亮,第二次按下时第一盏灯灭,同
时第二盏灯亮,第三次按下时两盏灯同时亮,第四次下时两盏灯同时灭……以此规律循环下
OFF
输出 0 ON
OFF
I/O 分配:
输入信号 信号元件及作用 元件或端子位置
0
按钮
直线区 任选
输出信号 控制对象及作用 元件或端子位置
0
信号灯
声光显示区
(2)用计数器构成计时器(有断电记忆功能)
输入 0 ON
OFF
TIM000 ON
OFF
扫描周期 → ← →
← 计时器设定值
输出 0 ON OFF
欧姆龙 PLC 课堂实验实例
1.走廊灯两地控制
2.走廊灯三地控制
锁存指令使用 1.单按钮单路输出
2.单按钮双路单通输出控制
3.单按钮双路单双通输出控制
《可编程序控制器(PLC)》实训指导书
OMRON电子血压计使用说明书

1 如何获得血压计的读数概要此款OMRON MX3 Plus电子血压计不适合去测量心脏跳动的频率。
怀孕期间、脉搏无规律和动脉异常等类似影响测量的,请求教你的医生。
测量前避免吃饭、饮酒、吸烟、运动和洗澡。
测量前和测量中应保持平静、放松。
你决不能不听从医生的吩咐而改变所服用的药剂剂量。
将此款血压计保存于温度–20℃至60℃之间的干燥、封闭的地方。
如果3个月或更长时间不使用,请将所有电池从电子血压计中取出。
使用时的劝告一天至少检查你的血压两次(早餐前、工作后)。
当你在车上时,不要测量你的血压。
请始终在同一个手臂上测量血压。
在测量前,将“布袖口”缠好在手臂上。
警告使用环境温度在10℃至40℃。
使用中避免剧烈振动、撞击、磁场、电器干扰及其它。
不可在强烈日光下测量。
测量期间与移动电话保持至少5米远。
不要将“布袖口”缠绕在除手臂之外的其它物品上。
不要将“布袖口”和管子折叠。
不要将OMRON MX3 Plus血压计摔落。
2 视图A 显示屏B 记忆按钮C 开始按钮D 开关按钮E 交流电源插口F 布袖口G 气管 H 气管插头 J 电池盒 K 气管插口3 准备工作⑴滑开电池盖。
⑵按照图示插四节电池进电池盒,并合上电池盒。
注意!必须是四节相同的AA LR6 碱性电池!连接布袖口使布袖口缠绕好注意!当布袖口没有缠绕好手臂时,不要使布袖口膨胀!如上图,将H(气管插头)插入K(气管插口)⑴除去手臂上衣物注意!卷起袖子时,切勿压迫血液流动!⑵将布袖口一端穿过H(金属环)注意!不要将气管裹入⑶手臂穿过布袖口布袖口内!注意!如测量左臂,使气管与手臂、中指保持平行!如上图;如测量右臂,则将气管与右手的小手指保持平行!如左图。
布袖口下端与肘关节保持1至2厘米!⑷捏住布袖口末端,将它绕在手臂上,如左图。
注意!确信布袖口很好的裹住、粘好,否则不得膨胀布袖口压迫手臂!4 Operation操作过程控制程序 P低压数值(毫米汞柱)B记忆按钮 Q记忆显示:存储中的记录C开始按钮数据D开关按钮 R脉搏:每分钟心跳次数测量屏幕 S没电:电力太弱或耗尽M高压数值 T泄压:布袖口压力降低、(毫米汞柱) 测量完毕N心脏符号: U膨胀:布袖口膨胀、测闪烁-仪器测量量仪器启动长亮-测量完毕 V记忆位置:1至14注意!在连续两次测量中,应有最短三分钟的一个间隔!1坐在舒适的桌子 2放松你的手臂,并将旁,双脚平放在地手掌心朝上。
微欧姆计作业指导书
微欧姆计作业指导书一、引言微欧姆计是一种用于测量电阻的仪器,广泛应用于电子工程、电路设计以及实验室等领域。
本文将为您提供详细的微欧姆计作业指导书,以帮助您正确、高效地完成相关实验或任务。
二、实验目的本实验的目的是熟悉微欧姆计的使用方法,并通过测量不同电阻值的电阻器,掌握微欧姆计的测量原理和技巧。
三、实验器材与材料1. 微欧姆计:型号OM-2000,测量范围0.01Ω-2000Ω。
2. 电阻器:包括不同电阻值的电阻器,如100Ω、220Ω、470Ω等。
3. 电源:直流电源,电压稳定性要求高于0.1%。
4. 电缆:用于连接电路的导线。
5. 示波器:可选,用于观察电阻器上的电压波形。
四、实验步骤1. 准备工作a. 将微欧姆计与电源连接,确保电源的电压稳定性。
b. 将微欧姆计与电阻器连接,确保连接稳固。
c. 若使用示波器,将其与电阻器的电压端口连接。
2. 测量电阻值a. 打开电源,确保电压稳定后,调节微欧姆计的量程选择开关,选择适当的量程。
b. 将微欧姆计的测试探头分别连接到电阻器的两端,并等待稳定的测量结果。
c. 读取微欧姆计上显示的电阻值,并记录下来。
3. 分析结果a. 将测得的电阻值与电阻器标称值进行比较,计算误差。
b. 若使用示波器,观察电阻器上的电压波形,并分析其特征。
五、注意事项1. 在进行测量之前,确保微欧姆计的量程选择正确,以避免测量结果超出范围。
2. 保持电路连接稳固,避免接触不良或松动导致测量误差。
3. 确保电源电压稳定,以保证测量的准确性。
4. 若使用示波器观察电压波形,注意调节示波器的时间基准和垂直灵敏度,以获取清晰的波形图像。
5. 在记录测量结果时,注意标明电阻器的标称值和测得的电阻值,并计算误差。
六、实验结果与讨论根据实验步骤所述方法,测量不同电阻值的电阻器,并记录测得的电阻值和计算的误差。
根据测量结果进行分析和讨论,比较实际测得的电阻值与电阻器的标称值之间的差异,探究可能的原因。
目录

OMRON CX-Programmer-用户手册CX-Programmer 用户手册2.0版OMRON CX-Programmer –用户手册注意OMRON产品要求由合格的操作人员按照正常的程序使用,并且只适用于本手册所描述的目的。
下列约定将指出本手册中的各注意事项并给予分级。
请务必始终注意他们所提供的信息,否则可能导致人身伤害或者产品毁坏。
危险!提示,如果不加注意,极有可能导致死亡或者重伤。
警告提示,如果不加注意,可能导致死亡或者重伤。
注意提示,如果不加注意,可能导致或轻或重的伤害、产品损坏或操作故障。
OMRON 产品附注所有OMRON产品在本手册中均为大写。
当单词“Unit”用于表示OMRON产品时,不管其是否以正式的产品名称出现,也一律采用大写。
缩写“PLC”表示可编程逻辑控制器,不用作其他任何产品的缩写。
iOMRON CX-Programmer –用户手册ii直观标题和手册约定下列标题出现在手册左列,帮助您区分各种类型的信息。
指出为了方便有效地操作产品的各种特别重要的信息。
1, 2, 3…用于表示分类列举的标识,例如程序、检查表等。
表示同一窗口的菜单上某一可用选项在工具栏上的快捷按钮。
OMRON, 2000版权所有。
本出版物的任何部分,未经OMRON事前书面许可,均不能复制、存储在检索系统中,或者以任何形式传播,或者以任何方法(机械、电子及其他方法)影印、复制。
所有版权和商标得到公认。
使用本手册所包含的资料不必承担专利责任。
由于OMRON将持续不断地努力改进其高品质的产品,因此本手册所涉及内容可能更改,恕不另行通知。
在编写此手册时已指出了所有注意事项,尽管如此,OMRON对于其中的错误或遗漏不承担任何责任,对于使用本出版物中所包含的信息所造成的危害也不承担任何责任。
OMRON CX-Programmer –用户手册iii关于本手册本手册对CX-Programmer应用程序和其对OMRON SYSMAC CS, CV 以及C 系列PLC编制程序的能力进行了描述。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验指导书实验一:基本指令训练一、实验目的1、熟悉OMRON系列PLC编程软件CX-Programmer的操作;2、熟悉基本逻辑指令,定时、计数指令,分支、跳转、暂存指令,移位、锁存、微分指令,数据运算指令的应用。
二、实验原理图三、实验步骤1、按实验箱上程序的要求接好电路(接线图见附图)。
在编程软件上编制程序,下载到PLC中,操作并观察程序执行情况。
2、设计一抢答器程序并进行运行调试。
设计要求如下:参加智力竞赛的A、B、C三人的桌上各有一只抢答按钮,分别为SBl (001)、SB2(002)和SB3(003),用3盏灯Ll~L3(1001、1002、1003)显示他们的抢答信号。
当主持人接通抢答允许开关SA1(000)后抢答开始,最先按下按钮的抢答者对应的灯亮,与此同时,应禁止另外两个抢答者的灯亮,指示灯在主持人按下复位开关SA2(0004)后熄灭。
3、用(000)端作输入控制,将(1000~1005)分别接对应的输出端,利用分支指令编程,使000=“1”时(1000~1002)对应的灯以1s的周期轮流闪烁10s;000=“0”时(1003~1005)对应的灯轮流闪烁10s后自动循环。
再用跳转指令实现上述过程,比较程序执行情况。
4、将(000~005)接对应的输入端,(1000、1001、1002)接对应的输出端。
用开关设定(000~005)的状态作为数据输入,并用传送指令将其传送至内部通道并与一给定数值35(BCD码)比较,将比较结果通过(1000、1001、1002)对应的灯显示。
四、实验报告要求1、写出I/O分配表、梯形图程序、指令表程序;2、通过编程软件输入相关指令的梯形图程序,观察指令执行情况,认真记录实验中发现的问题、错误、故障及解决方法;3、编写实验报告。
实验二:电动机的星形-三角形控制在三相异步电动机Y/Δ换接启动模拟控制实验区完成本实验,实验接线参见附图。
在电机进行正反向的转、换接时,有可能因为电动机容量较大或操作不当等原因使接触器主触头产生较为严重的起弧现象,如果在电弧还未完全熄灭时,反转的接触器就闭合,则会造成电源相间短路。
用PLC来控制电机起停则可避免这一问题。
一、实验目的掌握电机星/三角换接启动主回路的接线。
学会用可编程控制器实现电机星/三角换接降压启动过程的编程方法。
二、实验要求合上启动按钮后,电机先作星型连接启动,经延时6秒后自动换接到三角形连接运转,按下停止按钮电动机停转,并用实验台上给定开关模拟热继电器保护过程。
本实验采用PLC软件模拟电动机的换接启动过程。
三、实验报告要求1、设计Y/△电动机起动的电气原理图;2、设计Y/△电动机起动的PLC控制梯形图;3、按上图接线,根据设计的PLC梯形图程序在实验台上进行调试与操作;4、写出I/O分配表、梯形图程序、指令表程序;5、编写实验报告。
实验三:两种液体混合装置控制在液体自动混合实验区完成本实验,实验接线参见附图。
一、实验目的熟练使用各条基本指令,通过对工程实例的模拟,熟练地掌握PLC 的编程知识以及相关的程序调试技术。
二、控制要求从实验面板图可以知道:本混合装置用来将两种液体进行混合。
SL1、SL2、SL3是液面传感器,液体A、B的阀门和混合液的阀门由电磁阀YV1、YV2和YV3进行控制,M为搅拌电动机。
它们的控制要求如下:1、初始状态:装置投入运行前,要将液体A、B的阀门关闭,混合液的阀门打开5秒,将容器内的液体排空后关闭。
2、启动:按下启动按钮SB1,混合装置就开始按照下面编制好的步骤进行操作:液体A的阀门打开,液体A流入容器;当液体A的液面到达SL2时,SL2会接通,从而关闭液体A的阀门,打开液体B的阀门。
当液面达到传感器SL1时,液体B的阀门会关闭,搅拌电机则开始运转,将液体A和B 的混合液体进行搅匀。
搅拌电机运转10秒钟后停止,然后混合液体的阀门打开,开始将搅拌均匀的混合液体排出。
当容器内的液面下降到SL3时,SL3由接通变为断开。
再过10秒种,容器内的液体排空,混合液的阀门关闭,开始下一周期的操作。
进行自动循环工作。
3、停止:按下停止按钮SB2后,在当前的混合液操作处理完毕后,才停止操作,然后返回到初始状态。
三、实验报告要求1、列出PLC控制I/O口(输入/输出)元件地址分配表。
2、设计两种液体混合装置的PLC控制梯形图。
3、按上图接线,根据设计的PLC梯形图程序在实验台上进行调试与操作。
4、编写实验报告。
实验四:运料小车的控制在运料小车实验区完成本实验,实验接线参见附图中相应主机接线图。
一、实验目的熟悉PLC在工业生产中的应用,和根据生产控制的要求编制PLC程序的方法,提高对所编制的程序进行修改和调试的能力。
二、实验要求合上启动按钮SD后,行程开关SQ1处于接通状态,小车停在原位(A仓),装料指示灯V1点亮,开始向小车装料。
延时5秒后V1熄灭,装料完毕。
打开右行开关RX,小车开始右行,R1、R2、R3顺序点亮。
到达B 仓后,行程开关SQ2接通,R1、R2、R3灯灭,卸料指示灯V2点亮,小车开始卸料。
延时5秒后V2熄灭,卸料完毕。
打开左行开关LX,小车开始左行,L1、L2、L3顺序点亮。
到达A仓后,行程开关SQ1接通,L1、L2、L3灯灭,小车回到原位,从新开始装料并重复上述过程,开始循环工作。
三、运料小车的实验面板图试验箱图中,下半部分的SD、ST和SQ1、SQ2、RX、LX分别接主机的输入点X0(表示启动)、X1(表示停止)和X2(表示左限)、X3(表示右限)、X4(表示左行)、X5(表示右行);V1、V2、R1、R2、R3、L1、L2、L3分别接主机的输出点Y0(表示装料)、Y1(表示卸料)、Y2、Y3、Y4、Y5、Y6、Y7。
四、实验报告要求1、写出I/O分配表、梯形图程序、指令表程序;2、通过编程软件输入相关指令的梯形图程序,观察指令执行情况,认真记录实验中发现的问题、错误、故障及解决方法;3、编写实验报告。
实验五:机械手动作模拟控制在机械手动作模拟控制实验区完成本实验,实验接线参见附图。
一、实验目的用数据移动指令来实现机械手动作的模拟二、机械原理和控制要求机械手将一工件由A处传送到B处,中间需经过上升/下降和左移/右移等动作,这些动作通过双线圈二位电磁阀推动气缸完成。
当电磁阀线圈通电,就执行其相应的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,线圈断电,机械手的下降动作停止,当相反方向的线圈通电时机械手则执行上升动作。
另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电执行放松动作。
设备装有上、下00001:下限开关(SQ1) 01000:下降电磁阀 01003:右移电磁阀00002:上限开关 (SQ2) 01001:夹紧电磁阀 01004:左移电磁阀00003:右限开关 (SQ3) 01002:上升电磁阀 01005:原位指示灯00004:左限开关 (SQ4)开始时,机械手处于原位,00002和00004开关处于接通状态(即“1”),原位指示灯点亮;按下启动按钮(00000), 01000通电,执行下降动作;同时,上限开关00002断开,原位指示灯熄灭;当下降到位时,下限开关00001接通,使下降电磁阀01000断电,夹紧电磁阀01001动作,同时启动定时器T0,延时2秒;2秒后,T0常开接点接通,上升电磁阀01002接通,执行上升动作。
上升过程中01001必须保持接通,使夹紧电磁阀在上升过程中一直保持夹紧动作。
上升到位后,上限电磁阀00002重新接通, 01002电磁阀断开,不再执行上升动作;同时01003电磁阀通电,执行右移动作。
移到右边位置后,右限位开关00003动作,使01003线圈断电,停止右移;同时,使01000线圈再次通电,执行下降动作(在右侧下降)。
等到下降到预定位置时,下限开关00001重新接通,从而使01000线圈断电,停止下降动作,并使01001断开,机械手执行松开动作,同时给定时器T1通电,延时2秒。
2秒后,T1常开触点闭合,从而使01002线圈通电,而下限开关00001断开,再次执行上升动作;上升到使上限开关00002重新接通时,使01002上升线圈断电,停止上升动作;同时01004线圈通电,执行左移动作。
左移到使左限开关00004接通时, 01004线圈断电,停止左移动作。
机械手回到原位。
这时,上限开关00002和左限开关00004又处于接通状态,并准备好下一个移位周期。
三、实验报告要求:1、写出I/O分配表、梯形图程序、指令表程序;2、通过编程软件输入相关指令的梯形图程序,观察指令执行情况,认真记录实验中发现的问题、错误、故障及解决方法;3、若要实现全自动循环,应怎样修改程序;4、编写实验报告。
实验六:交通道口红绿灯控制在十字路口交通灯控制实验区完成本实验,实验接线参见附图。
一、实验目的1、进一步熟悉PLC的指令系统,重点是定时器和计数器的应用;2、熟悉时序控制的设计和调试方法。
二、实验内容1、任务:在城市十字路口的东、西、南、北方向装设了红、绿、黄三色交通信号灯;为了交通安全,红、绿、黄灯必须按照一定时序轮流发亮。
试设计、安装与调试十字路口交通信号灯示控制电路。
交通灯示意图和交通灯时序图:如下图所示。
图2—2 交通灯示意图、交通灯时序图2、十字路口交通信号灯示控制要求如下:(1)启动:当按下启动按钮时,信号灯系统开始工作。
(2)停止:当需要信号灯系统停止工作时,按下停止按钮即可。
(3)信号灯正常时序:①信号灯系统开始工作时,南北红灯亮,同时东西绿灯亮。
②南北红灯亮维持25s,在南北红灯亮的同时东西绿灯也亮并维持20s,20s后,东西绿灯闪亮3s(亮0.5s。
熄0.5s),绿灯闪亮3s后熄灭,东西黄灯亮并维持2s,2s后,东西红灯亮,南北绿灯亮。
③东西红灯亮维持30s,南北绿灯亮维持25s,到25s时南北绿灯闪亮3s后熄灭,南北黄灯亮,并维持2s,到2s时,南北黄灯熄,南北红灯亮,同时东西红灯熄,东西绿灯亮,开始第二个周期的动作。
④以后周而复始地循环,直到停止按钮被按下为止。
三、实验报告要求1、列出PLC控制I/O口(输入/输出)元件地址分配表。
2、设计十字路口交通信号灯的PLC控制梯形图;3、按上图接线,根据设计的PLC梯形图程序在实验台上进行调试与操作。
4、编写实验报告。
附图:+24V电源面板演示实验面板主机面板(输入)C P M 2A H 系列PLC ☜主机面板(输出)表示实验线连接。