【精品课件】门座起重机总体设计
门座起重机毕业设计
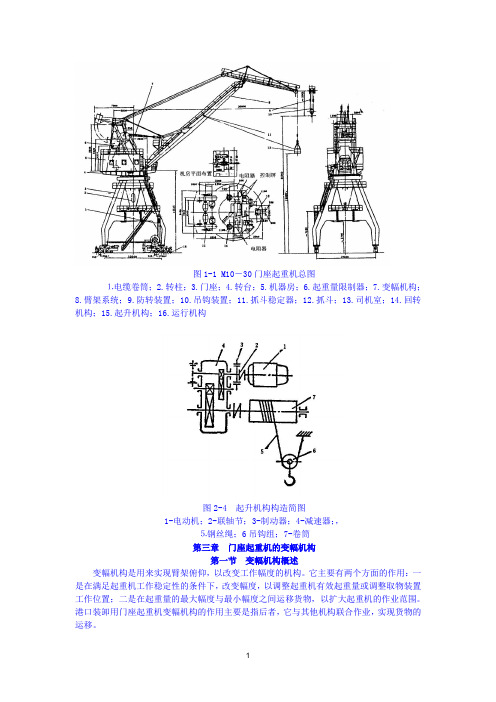
图1-1 M10-30门座起重机总图⒈电缆卷筒;2.转柱;3.门座;4.转台;5.机器房;6.起重量限制器;7.变幅机构;8.臂架系统;9.防转装置;10.吊钩装置;11.抓斗稳定器;12.抓斗;13.司机室;14.回转机构;15.起升机构;16.运行机构图2-4 起升机构构造简图1-电动机;2-联轴节;3-制动器;4-减速器;,⒌钢丝绳;6吊钩组;7-卷筒第三章门座起重机的变幅机构第一节变幅机构概述变幅机构是用来实现臂架俯仰,以改变工作幅度的机构。
它主要有两个方面的作用:一是在满足起重机工作稳定性的条件下,改变幅度,以调整起重机有效起重量或调整取物装置工作位置;二是在起重量的最大幅度与最小幅度之间运移货物,以扩大起重机的作业范围。
港口装卸用门座起重机变幅机构的作用主要是指后者,它与其他机构联合作业,实现货物的运移。
二、对工作性变幅机构的要求为了适应工作性变幅的需要,变幅机构应满足下面两点要求:1.载重水平位移使载重在变幅过程中沿水平线或接近于水平线的轨迹移动。
2.臂架自重平衡使臂架系统的总重心高度在变幅过程中保持不变或变化很小。
第二节载重水平位移的补偿原理为使载重在变幅过程中沿水平线或近似水平线移动,可以采用多种形式来达到,但基本上可以归纳为两种类型:起升绳补偿法和组合臂架法。
在这里主要向大家介绍一下港口常用的组合臂架法。
组合臂架法的基本原理是:采用组合式臂架,依靠组合臂架端点在变幅过程中,沿水平或接近水平线的轨迹移动,从而使载重在变幅过程中的高度不变或变化很小。
组合臂架法最常见的有两种:刚性拉杆式组合臂架和挠性拉索带曲线形象鼻架式组合臂架。
港口装卸生产使用的门座起重机大多采用刚性拉杆式组合臂架——四连杆机构。
图3-1 刚性拉杆的组合臂架补偿原理图3-1所示为采用刚性拉杆式组合臂架来使载重水平变幅的补偿原理图。
组合臂架是由主臂架、直线型象鼻架和刚性拉杆三部分组成的。
连同机架ea一起考虑,组合臂架实际上构成一个四连杆机构。
MQ100门式起重机总体设计
优秀设计MQ100 门式起重机总体设计计算书(共16页,含封面)XXX机械工程研究所20XX年4月一. 总体计算计算原则:MQ100门式起重机设计计算完全按《起重机设计规范》GB3811执行,并参照下列标准进行设计计算:《塔式起重机设计规范》GB/T13752-92 《法国塔式起重机设计规范》NFE52081 工作级别 A 5 利用等级 U 5 起升机构 M 5 变幅机构 M 4 回转机构 M 4 行走机构 M 4 最大幅度 13m最大起重量 8000Kg(一) 基本参数:回转速度 0.7r/min回转制动时间 5s行走速度 12.5/25m/min行走制动时间 6s 回转惯性力()Kg RM M g t Rn F 002242.0.60..25.1=⨯⨯=π回其中 g=9.81 n=0.7r/min t=5s行走惯性力: ()Kg M M g t vF 0106184.0.605.1=⨯⨯=行其中 g=9.81 V=25m/min t=6s (二) 载荷组合:自重力矩、惯性力及扭矩名称自重Kg 回转半径m对中弯矩Kg.m回转惯性力Kg回转扭矩Kg.m行走惯性力Kg行走扭矩Kg.m距行走轨顶面高度H(m)起重臂根部节 13.2m1728 7.55 13046 29.3 221 18.3 139 14.937 小车牵引机构320 8.75 2800 6.3 55 3.4 30 14.937 起重臂端部节108 14.35 1550 3.5 50 1.1 16 14.937 起重臂拉杆429 5.34 2291 6.1 33 4.6 24 16.686 平衡臂结构1656 -3.9 -6458 -14.5 57 17.6 -69 14.637 平衡臂拉杆227 -2.12 -481 -1.1 2 2.4 -5 16.353 配重10500 -6.11 -64155 -143.8 879 111.5 -681 13.762 起升机构(含钢丝绳)2350 -5.8 -13630 -30.6 177 24.9 -145 15.667 塔头2237 0.2 447 1 0.2 23.8 5 14.637 称重滑轮66 0.86 57 0.1 0.1 0.7 1 14.558 驾驶室(含电气系统)545 1.02 556 1.2 1 5.8 6 12.818 回转支承3611 0 0 0 0 38.3 0 11.417 回转机构367 0 0 0 0 3.9 0 12.217 底架10479 0 0 0 0 111.3 0 5.146 压重30800 0 0 0 0 327 0 5.146 电缆卷筒217 2 534 0 0 2.3 0 1.4 连接附件600 0 0 0 0 6.4 0 0.55 行走机构1690 0 0 0 0 17.9 0 0.26 合计67930 -63443 -142.5 1457 721 -679 上表中的回转惯性力到轨顶面的力矩总计为:-1971kg.m上表中的行走惯性力到轨顶面的力矩总计为:5378kg.m(三)起重小车、吊钩和吊重载荷起重小车265kg绳60kg吊钩230kg起升动载系数(起升机构用40RD20):=1.136, q=8tV=16m/min时,2吊重q=8000kg, 幅度R=13m(1) 吊载Q=(8000+230+60/2)×1.136+(265+60/2)×1.1=9708kgM=9708×13=126204kg.m(2) 风载(包括起重小车、吊钩和吊重)迎风面积A=5.52+1.6×82/3=11.92m2风力:F=11.92×25=298kg=298×13=3874kg.m风扭矩:Tn风力到轨道上平面的力矩:M=298×12=3576kg.m(3) 回转惯性力F=0.002242×(8000+230+265+60)×13=249kg=249×13=3237kg.m回转惯性扭矩: Tn回转惯性力到轨道上平面的力矩:M=249×12=2988kg.m (4)行走惯性力F=0.0106184×(8000+230+265+60)=91kg行走惯性扭矩:Tn=91×13=1183kg.m行走惯性力到轨道上平面的力矩:M=91×12=1092kg.m(四) 风载荷A、工作,垂直风(风向与臂架垂直)臂长jib=13m,垂直风名称迎风面积(m2) 回转半径(m)工作风力(kg)风扭矩(kg.m)标高(m)起重臂根部节 13.2m7.12 7.55 178 1343.9 14.937 小车牵引机构0.48 8.75 12 105 14.937 起重臂端部节0.22 14.35 5.5 78.9 14.937 起重臂拉杆0.78 5.34 19.5 104.1 16.686 平衡臂结构11.33 -3.9 283.3 -1104.7 14.637 平衡臂拉杆0.27 -2.12 6.8 -14.3 16.353 配重 1.36 -6.11 34 -207.7 13.762 起升机构(含钢丝绳)1.3 -5.8 32.5 -188.5 15.667 塔头3.6 0.2 90 13 14.637 称重滑轮0.2 0.86 5 4.3 14.558 驾驶室(含电气系统)0.46 1.02 11.5 11.7 12.818 回转支承 1.8 0 45 0 11.417 回转机构0.2 0 5 0 12.217 底架25.7 0 642.5 0 5.146 压重 6.62 0 165.5 0 5.146 电缆卷筒0.6 2 15 0 1.4 连接附件0.3 0 7.5 0 0.55 行走机构 3.64 0 91 0 0.26 总计 65.98 1650 146(注:标高均指风力作用点到轨顶面的高度)上表中的风力到轨顶面的力矩总计为:14799kg.mB、工作,平行后吹风(风向与臂架平行,与底架平行)臂长jib=13m,后吹风名称迎风面积(m2) 工作风力(kg标高(m)起重臂根部节 13.2m2.2 55 14.937 小车牵引机构0.5 12.5 14.937 起重臂端部节0.1 2.5 14.937 起重臂拉杆0.15 3.8 16.686 平衡臂结构 2.05 51.3 14.637 平衡臂拉杆0.5 12.5 16.353 配重 1.36 34 13.762 起升机构(含钢丝绳)1.4 35 15.667 塔头 5.6 140 14.637 称重滑轮0.12.5 14.558 驾驶室(含电气系统)1.8 45 12.818 回转支承 4 100 11.417 回转机构0.25 6.3 12.217 底架25.7 642.5 5.146 压重 6.62 165.5 5.146 电缆卷筒0.6 15 1.4 连接附件0.3 7.5 0.55 行走机构3.64 91 0.26 总计 56.87 1421.9(注:标高均指风力作用点到轨顶面的高度)上表中的风力到轨顶面的力矩总计为:11168kg.mC、工作,45︒后吹风(风向与臂架平行,与底架成45︒)臂长jib=13m,45︒后吹风名称迎风面积(m2) 工作风力(kg标高(m)起重臂根部节 13.2m2.2 55 14.937 小车牵引机构0.5 12.5 14.937 起重臂端部节0.1 2.5 14.937 起重臂拉杆0.15 3.8 16.686 平衡臂结构 2.05 51.3 14.637 平衡臂拉杆0.5 12.5 16.353 配重 1.36 34 13.762 起升机构(含钢丝绳)1.4 35 15.667 塔头 5.6 140 14.637 称重滑轮0.12.5 14.558 驾驶室(含电气系统)1.8 45 12.818 回转支承 5 125 11.417 回转机构0.25 6.3 12.217 底架30.84 771 5.146 压重7.94 198.5 5.146 电缆卷筒0.6 15 1.4 连接附件0.36 9 0.55 行走机构 4.37 109.3 0.26 总计∑65.12 1628.2(注:标高均指风力作用点到轨顶面的高度)上表中的风力到轨顶面的力矩总计为:12290kg.mD、非工作,平行后吹风(风向与臂架平行)臂长jib=13m,后吹风名称迎风面积(m2) 非工作风力(kg标高(m)起重臂根部节 13.2m2.2 176 14.937 小车牵引机构0.5 40 14.937 起重臂端部节0.1 8 14.937 起重臂拉杆0.15 12 16.686 平衡臂结构 2.05 164 14.637 平衡臂拉杆0.5 40 16.353 配重 1.36 108.8 13.762 起升机构(含钢丝绳)1.4 112 15.667 塔头 5.6 448 14.637 称重滑轮0.1 8 14.558 驾驶室(含电气系统)1.8 144 12.818 回转支承 4 320 11.417 回转机构0.25 20 12.217 底架25.7 2056 5.146 压重 6.62 529.6 5.146 电缆卷筒0.6 48 1.4 连接附件0.3 24 0.55 行走机构3.64 291.2 0.26 总计 56.87 4550(注:标高均指风力作用点到轨顶面的高度)上表中的风力到轨顶面的力矩总计为:35732kg.mE、非工作,45︒后吹风(风向与臂架平行,与底架成45︒)臂长jib=13m,45︒后吹风名称迎风面积(m2) 非工作风力(kg标高(m)起重臂根部节 13.2m2.2 176 14.937 小车牵引机构0.5 40 14.937 起重臂端部节0.1 8 14.937 起重臂拉杆0.15 12 16.686 平衡臂结构 2.05 164 14.637 平衡臂拉杆0.5 40 16.353 配重 1.36 108.8 13.762 起升机构(含钢丝绳)1.4 112 15.667 塔头 5.6 448 14.637 称重滑轮0.1 8 14.558 驾驶室(含电气系统)1.8 144 12.818 回转支承 5 400 11.417 回转机构0.25 20 12.217 底架30.84 2467.2 5.146 压重7.94 635.2 5.146 电缆卷筒0.6 48 1.4 连接附件0.36 28.8 0.55 行走机构 4.37 349.6 0.26 总计∑65.12 5209.6(注:标高均指风力作用点到轨顶面的高度)上表中的风力到轨顶面的力矩总计为:-39322kg.m二、载荷汇总MQ100门式起重机各力到轨顶面的载荷汇总如下:非工作,含小车,无系数重力:67930+495=68425kg工作,含小车,无系数重力:67930+495+60+8000=76485kg工作,含小车,有系数重力:1.1⨯67930+9708=84431kg非工作,含小车,无系数重力矩:-63443+2.9⨯495=-62008kg.m工作,含小车,无系数重力矩:-63443+8555⨯13=47772kg.m工作,含小车, 有系数重力矩:-1.1⨯63443+9708⨯13=56417kg.m工作,垂直风力:1650+298=1948kg工作,后吹风力:1422+298=1720kg工作, 45︒后吹风力:1628+298=1926kg非工作, 平行前吹风力:4550+5.52⨯80=4992kg非工作, 45︒前吹风力:5209.6+5.52⨯80=5651kg工作,垂直风力矩:14799+298⨯12=18375kg.m工作, 后吹风力矩:11168+298⨯12=14744kg.m工作, 45︒后吹风力矩:12290+298⨯12=15866kg非工作, 平行前吹风力矩:-(35732+5.52⨯80⨯12)=-41031kg.m 非工作, 45︒前吹风力矩:-(39322+5.52⨯80⨯12)=-44621kg.m 工作,回转惯性力:-142.5+249=106.5kg工作,行走惯性力:721+91=812kg工作,回转惯性力矩:-1971+249⨯12=1017kg.m工作,行走惯性力矩:5378+91⨯12=6470kg.m工作,垂直风力扭矩:146+298⨯12=3722kg工作,回转惯性力扭矩:1457+249⨯12=4445kg.m工作, 行走惯性力扭矩:-679+91⨯12=413kg.m回转离心惯性力忽略不计三、MQ100行走式门式起重机的稳定性计算(一)工作状态下的稳定性稳定力矩(kg.m)M前稳M后稳空载力矩(包括小车和吊钩)62008 -62008空载时自重对倾覆边的力矩119744(68425×1.75119744(68425×1.75181752 5773613m3.5m后倾翻边前倾翻边1. 工况:工作、静态、无风(R=13m,Q=8t)回转、行走M前倾=M负荷+M行走=1.5×8000×(13-1.75)+6470 =141470kg.mM前稳/M前倾=181752/141470=1.28>12. 工况:工作、动态、有风(R=13m,Q=8t)回转、行走、后吹风M前倾=M负荷+M行走+M风=1.3×8000×(13-1.75)+6470+14744 =138214kg.mM前稳/M前倾=181752/138214=1.31>13. 工况:工作、动态、突然卸载(R=13m,Q=8t 0)无回转、无行走、风M后倾=M负荷+M风=0.3×8000×(13+1.75)+14744 =50144kg.mM后稳/M后倾=57736/50144=1.15>14. 工况:工作、动态、有风(R=13m,Q=8t)回转、行走、风M前倾=M回转+M行走+M风=1017+6470+18375 =25862kg.mM稳=(67930+495+60+8000)×1.75 =133849kg.mM稳/M前倾=133849/25862=5.17>15. 工况:工作、动态、无风(R=13m,Q=8t)无回转、无行走、无风 M前倾=1.6×8000×(13-1.75)=144000kg.mM前稳/M前倾=181752/144000=1.26>1(二)非工作状态下的稳定性2.9m3.5m倾翻边风M倾=1.1M风=1.2×41031=49237kg.mM稳/M倾=57736/49237=1.17>1综上所述:M100行走式门式起重机在工作状态和非工作状态下的稳定性均安全.(三)安装状态下的稳定性(1).安装起重臂前(装起重臂前,在平衡臂上无配重)3.5m后倾翻边M后倾=6458+481+13630-447-57-556-534=18975kg.mM后稳=(67930-1728-320-108-429-10500)×1.75=95979kg.mM后稳/M后倾=95979/18975=5.06>1(2) 装上起重臂(13m臂长时,无配重)3.5m倾翻边M前倾=(63433+230×10) -64155=1578kg.mM前稳=(67930-10500)×1.75=100503kg.mM前稳/M前倾=100503/1578=63.7>1四、M100行走式门式起重机的台车支反力计算1. 工况:工作、45 后吹风(R=13m,Q=8t)D C回转、行走、风A B重力: 84431kg 重力力矩: 56417kg.m 回转力矩: 1017kg.m 行走力矩: 6470kg.m风力矩: 15866kg.mRA=(-84431/4)+(56417+15866)/(3.5×2)+6470/(2×3.5)=-5580kgRB=(-84431/4)-1017/(3.5×2)-6470/(2×3.5)=-22238kgRC=(-84431/4)-(56417+15866)/(3.5×2)-6470/(2×3.5)=-36635kgRD=(-84431/4)+1017/(3.5×2)+6470/(2×3.5)=-19978kg2. 工况:非工作、45 前吹风(R=2.9m,Q=0)D C风A B重力: 68425kg 重力力矩: -62008kg.m风力矩: 44621kg.mRC=-68425/4+62008/(3.5×2)+44621/(3.5×2)=+4436kgRC为正,故按三点支承计算RA=-62008/(1.75×2)-44621/(1.75×2)=-43085kgRB =RD=-68425/2-62008/(2×1.75×2)-44621/(2×1.75×2)=-55755kgRC=0。
门座式起重机

谢谢观看
门座式起重机
起重机
01 简史
03 组成
目录
02 分类 04 系统
门座起重机大多沿地面或建筑物上的起重机轨道运行,进行起重装卸作业。门座呈“”字形的起重机称半门 座起重机,其运行轨道的一侧设在地面上,另一侧设在高于地面的建筑物上。
简史
门座起重机是随着港口事业的发展而发展起来的。1890年,第一次将幅度不可变的固定式可旋转臂架型起重 机装在横跨于窄码头上方的运行式半门座上,成为早期的港用半门座起重机。随着码头宽度的加大,门座和半门 座起重机并列发展,并普遍采用俯仰臂架和水平变幅系统。第二次世界大战后,港用门座起重机迅速发展为便于 多台起重机对同一条船进行并列工作,普遍采用了转动部分与立柱体相连的转柱式门座起重机(图1[转柱式门座 起重机]),或转动部分通过大轴承与门座相连的滚动轴承式支承回转装置,以减小转动部分的尾径,并采用了减 小码头掩盖面(门座主体对地面的投影)的门座结构。在发展过程中,门座起重机还逐步推广应用到作业条件与 港口相近的船台和水电站工地等处。
③建筑安装用门座起重机:主要用在水电站进行大坝浇灌、设备和预制件吊装等,一般用吊钩。起重量和工 作速度一般介于前两类起重机之间。它具有整机装拆运输性好、吊具下放深度大、能较好地适应临时性工作和栈 桥上工作等的特点。
组成
门座起重机有起升、回转、变幅和运行机构,前3种机构装在转动部分上,每一周期内都参加作业。转动部分 上还装有可俯仰的倾斜单臂架或组合臂架及司机室。运行机构装在门座下部,用以调整起重机的工作位置带斗门 座起重机(图2 [带斗门座起重机])还装有伸缩漏斗、带式输送机等附加设备,以提高门座起重机用抓斗装卸散 状物料时的生产率。除电气保护装置外,还装有起重量或起重力矩限制、起重机夹轨器等安全装置。
门坐式起重机的设计毕业设计
海洋港口学院课程设计报告书课程名称单片机课程设计摘要在门座式起重机的设计过程中,首先综合介绍了门座式起重机的特点、分类、结构以及其现况及发展前景。
接下来确定总体方案,画出门座式起动机的机构简图,并对各个执行机构的主要参数进行计算。
在起重机的重要部分起升机构的设计中,重点是确定相应吨位的吊钩、钢丝绳,卷筒的尺寸计算及电动机、减速器、制动器等的选择。
最后的门座式起重机的变幅机构设计分为臂架设计和驱动机构设计,臂架是采用优化设计的方法来做的,通过Matlab软件得出结果。
关键词:门座式起重机,起升机构,变幅机构,优化设计I目录第1章绪论 (1)1.1 门座式起重机的综合评述 (1)1.1.1门座式起重机的特点及分类 (1)1.1.2门座式起重机的结构 (1)1.1.3门座式起重机的现状及发展趋势 (2)1.2设计任务与设计要求 (2)1.2.1 设计任务 (2)1.2.2 设计要求 (2)第2章总体方案的确定 (4)2.1起重机总体机构的确定 (4)2.2起重机执行机构的确定 (5)2.2.1 起升机构 (5)2.2.2 变蝠机构 (5)2.2.3 回转机构 (6)2.2.4 行走机构 (6)2.3门座式起重机的基本参数 (6)2.3.1起重量 (6)2.3.2起升高度 (6)2.3.3幅度 (7)2.3.4工作速度 (7)2.3.5工作类型 (7)2.3.6轨距 (8)2.3.7轮压 (8)2.3.8外形尺寸 (8)第3章起升机构的设计计算 (9)3.1卷绕系统 (9)3.2吊钩的选择 (10)3.3钢丝绳的计算 (11)3.4卷筒的计算 (12)II3.4.1卷筒的直径 (12)3.4.2卷筒的长度 (12)3.4.3卷筒的壁厚及校核 (13)3.5电动机的选择 (13)3.6减速器的选择 (14)3.7静力矩的计算 (15)3.8制动器的选择 (15)3.9起、制动时间的验算 (15)3.9.1起动时间的验算 (15)3.9.2制动时间的验算 (16)3.10发电机的发热验算 (16)第4章变幅机构的设计计算 (18)4.1臂架系统的设计计算 (18)4.1.1门座式起重机变幅机构优化模型 (19)4.1.2优化模型的简化 (21)4.1.2.1 设计变量 (23)4.1.2.2目标函数 (23)4.1.2.3 约束条件 (24)4.1.4算法与结论 (24)4.2变幅驱动机构 (26)4.2.1变幅机构的已知参数 (27)4.2.2传动效率 (28)4.2.3螺杆等效作用力 (29)4.2.4电动机功率的确定 (30)结论 (31)参考文献 (32)致谢 (33)附录 (34)III湖南工业大学本科毕业设计(论文)第一章绪论1.1门座式起重机的综合评述1.1.1门座式起重机的特点及分类门座式起重机是一种重要而又具有代表性的旋转类型运动式起重机,他因具有能让运输车顺利通过的门架结构而得名。
门座起重机总体设计

总结词
优化动力系统
能耗优化是门座起重机环保和经济效益的 重要体现,通过节能设计降低设备运行成 本。
采用高效电机和节能传动系统,降低设备 能耗。
优化液压系统
优化维护保养
采用节能液压元件和优化液压回路,提高 液压系统效率。
制定合理的维护保养计划,确保设备处于 良好状态,延长使用寿命。
环境适应性优化设计
总结词
控制系统是门座起重机高效作业的关 键,通过优化设计提高设备的操控性 能和作业精度。
优化电气系统
采用先进的电机、控制器和传感器, 提高设备的动力性能和响应速度。
优化操控系统
简化操作界面和流程,提高操控的便 捷性和准确性。
优化安全系统
增加安全保护装置和预化设计
工作原理
工作原理
门座起重机通过电动机驱动行走机构和旋转机构,实现货物的装卸和搬运。旋 转机构使吊钩和货物进行旋转,行走机构使整机移动,从而实现货物的快速装 卸。
操作方式
门座起重机通常采用遥控操作或自动操作,操作简单、安全可靠。
历史与发展
历史
门座起重机最早出现于20世纪初,随着科技的发展和工业化的推进,其设计和性 能不断得到优化和提高。
喷涂工艺
01
对金属表面进行喷涂可以起到防腐蚀、美观的作用,常用的涂
料包括油漆、粉末涂料等。
电镀工艺
02
电镀可以增强金属件的耐腐蚀性和耐磨性,适用于需要高耐久
性的部件。
热喷涂工艺
03
通过热喷涂将金属或非金属粉末喷涂到基材表面,形成具有特
殊性能的涂层,如耐磨、隔热、绝缘等。
05
门座起重机优化设计
结构优化设计
05
06
考虑人机工程学因素,优化操作室布局和 控制系统,提高操作便捷性和舒适性。
门座式起重机课程设计毕业设计毕业论文(设计)word格式[管理资料]
![门座式起重机课程设计毕业设计毕业论文(设计)word格式[管理资料]](https://img.taocdn.com/s3/m/4ea28527b9f3f90f77c61b91.png)
课程设计(第三组)任务书课程设计内容与要求:Rmax Rmin H A B C D E F G S6 24 4目录第一章门座式起重机概述概述 (2)第一节起重机概述 (2)第二节国内外起重机发展情况分析 (3)第三节门座起重机的构造原理及分类 (6)第四节门座式起重机的技术参数 (8)第二章门座起重机的变幅机构 (14)第一节变幅机构概述 (14)第二节载重水平位移的补偿原理 (15)第三节臂架自重平衡的补偿原理 (16)第四节变幅机构的传动形式 (17)第五节变幅缓冲装置 (19)第三章四连杆式门座起重机臂架及平衡重系统设计 (20)第一节四连杆门座起重机臂架简介 (20)第二节优化设计的数学模型 (21)第四章四连杆式变幅机构的运动学分析及Matlab优化设计..(30)第一节四连杆变幅机构运动学分析 (30)第二节优化分析及优化结果 (30)第三节象鼻梁M点轨迹绘制的matlab程序及轨迹图(33)第五章设计小结 (40)参考文献 (41)第一章门座起重机概述第一节起重机概述起重机(Crane)属于起重机械的一种,是一种作循环、间歇运动的机械。
一个工作循环包括:取物装置从取物地把物品提起,然后水平移动到指定地点降下物品,接着进行反向运动,使取物装置返回原位,以便进行下一次循环。
门座起重机是随着港口事业的发展而发展起来的1890年,第一次将幅度不可变的固定式可旋转臂架型起重机装在横跨于窄码头上方的运行式半门座上,成为早期的港用半门座起重机随着码头宽度的加大,门座和半门座起重机并列发展,并普遍采用俯仰臂架和水平变幅系统。
第二次世界大战后,港用门座起重机迅速发展为便于多台起重机对同一条船进行并列工作,普遍采用了转动部分与立柱体相连的转柱式门座起重机(图1[转柱式门座起重机]),或转动部分通过大轴承与门座相连的滚动轴承式支承回转装置,以减小转动部分的尾径,并采用了减小码头掩盖面(门座主体对地面的投影)的门座结构。
门座式起重机
门座式起重机一、用途与特点门座式起重机(俗称门机)系混凝土大坝施工用的主力设备之一,在火电建设组装场和工厂、码头及船厂也有应用。
结构介于建筑塔式起重机与港口装卸起重机或造船起重机之间,下设有门座以供运输车辆通过。
对于大坝浇筑混凝土用门座式起重机,要求采用易于拆卸及安装的拆拼式结构,其单元构件的外形尺寸须限制在公路、铁路运输的界限尺寸以内;兼具浇筑混凝土与安装设备的双重功能(以下分别称为浇筑工况和安装工况)。
浇筑工况时,各机构速度快,工作频繁,要求达到每小时10~12个工作循环以上,工作级别A6;安装工况时,必须能通过改绕钢丝绳或其他措施增大起重机在小幅度范围内的起重能力,要求工作慢而平稳,以利吊装就位,相当于工作级别A3~A4。
现有国产门机用于浇筑工况与安装工况的最大额定起重量之比约为1∶3~1∶2.5。
95%大坝用的门机均为国产,有浇筑工况时的额定起重量有100kN(3m3混凝土吊罐)和200kN(6m3混凝土吊罐)两种。
20世纪70年后开发的新机型,最大幅度增加到45~62m,在门座上设置了高塔架,实际上是一种门座式塔机,门机高架化,浇筑高度大大提高,一次可浇筑较高的大坝或浇筑到较高的部位,减少搬迁起重机——栈桥系统的次数,甚至不用栈桥而节约大量钢材和加快施工进度。
即使采用缆机和塔带机施工,由于其覆盖范围有限,其他水工建筑物如厂房、船闸、护坝等往往仍需配置一定数量的门机。
门机有动臂和定臂两种,动臂门机可以减少配置门距,抬吊方便;定臂门机自重轻,变工况容易,变幅功率小。
目前国产浇筑用门机多为动臂式。
国产门机尚需进一步完善品种系列,增加选择余地;在发展“高架化”的同时,实现“自升自装”,并能调整塔架高度,减少安装和拆卸难度;应能随时快捷地变换工况。
二、门座式起重机的构造特点部分常用门座式起重机分别简述如下。
1.DMQ540/30型门座式起重机DMQ540/30型门机(图6-39)具有37.5m长的刚性起重臂,可以在18~37m 幅度范围内全回转,门座轨距为7m,可同时通行2列窄轨(762mm)机车。
门座式起重机
门座起重机专业知识目录第一部分机械部分第一章概述第一节门座起重机各部分结构简介第二节门座起重机的主要技术参数第三节门座起重机的稳定性第二章门座起重机的起升机构第一节起升机构概述第二节起升机构钢丝绳的卷饶方式第三节起升机构的总体布置第四节抓斗第三章门座起重机的变幅机构第一节变幅机构概述第二节载重水平位移的原理第三节臂架自重平衡的原理第四节变幅机构的传动形式第五节变幅缓冲装置第四章门座起重机的旋转机构第一节旋转机构概述第二节旋转支承装置的形式与构造第三节旋转驱动装置的结构形式第五章门座起重机的运行机构第一节运行机构概述第二节运行驱动装置第六章门座起重机的安全装置第一节防风锚定装置第二节超负荷限制器第三节限位装置第二部分电气部分第一章概述第一节门座起重机交流调速方案及其性能比较第二节交流变频调速在起重机上的应用第二章电阻调速式门座起重机第三章电阻调速式门座起重机典型电路分析第一节供电第二节起升机构线路分析第三节变幅机构线路分析第四节旋转机构线路分析第五节行走机构线路分析第六节照明及辅助系统第七节联动控制台第四章变频调速式门座起重机电控系统分析第一节变频调速的基本思想第二节MQ2533型门座起重机电控系统分析1、电源部分2、起升/行走机构3、变幅机构4、旋转机构第五章电阻调速式门座起重机常见故障及处理第一节电气故障及处理第二节常用低压电器故障及处理第六章变频调速式门座起重机常见故障及处理方法第一节外围电气故障及处理第二节变频器常见故障及处理第七章32吨多用途门机电控系统分析第一节系统概述第二节电源供电第三节起升/行走机构第四节变幅机构第五节旋转机构第六节辅助机构第八章 32吨多用途门机常见故障及处理第九章变频器基础知识第一节变频器基础知识第二节日本安川616G5变频器第十章 PLC基础知识第一章门座起重机概述第一节门座起重机各部分结构简介门座起重机是港口码头数量和使用最多的、结构复杂、机构最多的、最典型的电动装卸机械。
门座式起重机1ppt课件

4、设锚定装置,锚定装置作用时与行走控制器的联锁开关。
5、台车架末端设缓冲器及急停开关,并在缓冲前装设自动减速和自
动停止装置。
6、海、陆侧左右端各设置撞杆式减速、停止、终点限位保护装置。
7、四个门腿外侧合适处设有行走声光警报装置(LED声光警报器),
上机斜梯入口处设有大车行走警示的LED警灯,要求起动前3S和停
1
门座式起重机
培训材料
.
2
一、门机设备概述 二、大车行走机构 三、物料系统 四、旋转机构 五、起升机构
六、变幅机构 七、司机室 八、抓斗 九、风速指示器
3
该门机主要由组合臂架系统、人字架、转盘、以及安装在转盘 上面的起升、变幅、旋转机构及机房、电气房、司机室等上部回 转部分,和由圆筒式门架、平衡梁、运行台车、抗风防倾装置及 其它安全装置等下部非回转部分及一些辅助机构与结构组成。臂 架、象鼻梁、平衡梁、大拉杆通过铰轴连接,与人字架、转盘等 支承构件组成一个四连杆平面机构的组合臂架系统,通过变幅驱 动装置实现不同幅度范围内的作业要求。该门机在工作范围内不 仅能实现各机构的独立动作,同时能够实现起升、变幅、旋转的 单独或联合动作。
免物料卡住压坏振动筛。
25
5、舱壁振动电机
返 回
舱壁振动电机
作用: 通过振动使成拱的物料坍塌落下。
运行中如何检查调整: 1、外观及接线完好,底脚螺栓无松动。 2、功能正常。
26
6、料斗行走机构
返 回
三合一电机
作用: 料斗配有两台三合一电机。使料
斗能够在料斗架上完成海、陆测皮 带地切换。
27
7、喷淋系统
返 回
作用: 水泵从水箱中吸取水形成压力经
运行中如何检查调整: 1、锚定在打开位置,并固定 好,行走时不会落下。 2、接近开关接线完好,感应 灵敏。
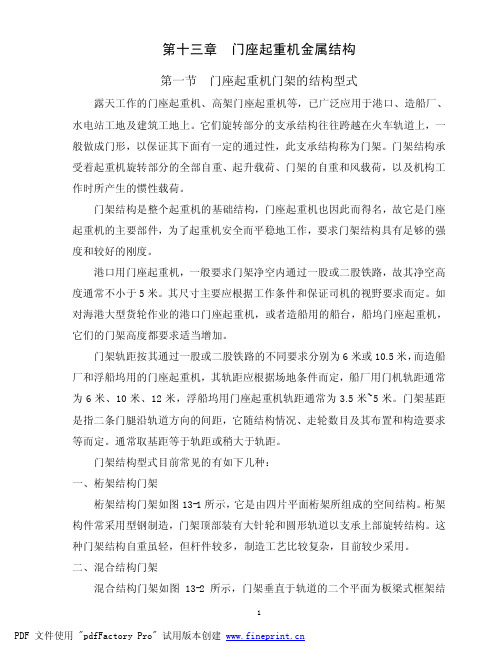
第十三章门座起重机金属结构
9
PDF 文件使用 "pdfFactory Pro" 试用版本创建
σ =
Rmax HY H Y ± 1 ± 2 A cos β W1 W2 Rmax ──支点最大压力
(13-12)
式中
A──断面面积;
H 1 ──垂直于起重机轨道方向的水平支反力; H 2 ──平行于起重机轨道方向的水平支反力; β ──门腿轴线相对于铅垂线的夹角(倾角);
5
PDF 文件使用 "pdfFactory Pro" 试用版本创建
机旋转轴上,也可按起重机旋转部分上的侧向外载荷直接计算; H──水平力,可分解为沿着轨道或垂直轨道二个方向的分力。 3. 作用在门架上的风载荷 上述载荷按不同的载荷组合在具体计算中又以不同形式出现,通常门架结构 按工作状态最大载荷进行结构强度计算。一般考虑两种载荷组合情况。 第一类载荷组合:门架运行 机构不动,在最大幅度处由地面突然起吊额定载 荷。这时门架受有下列载荷: 不平衡力矩: 垂直力: 门架自重:
图 13-4 25 吨门座起重机八撑杆式门架
4
PDF 文件使用 "pdfFactory Pro" 试用版本创建
图 13-5 45 吨门座起重机八撑杆式门架
图 13-6 圆筒形门架结构
图 13-7 二腿式门架
第二节 门座起重机门架结构的计算载荷
一、门架上的计算载荷 作用在门架上的载荷主要有: 1. 门架结构的自重及安放在门架上的机电设备重量。 2. 起重机旋转部分传来的作用力。 这些力包括旋转部分自重, 起升货物及吊 具的重量,还有起升、变幅及旋转机构制动惯性力等,所有这些作用在门架上的 力可归结为如下力系: M──起重机旋转部分在臂架摆动平面内的不平衡力矩(倾覆力矩); N──沿起重机旋转中心作用的垂直方向作用力; Mn──水平面内的扭转力矩。 可由极限力矩联轴节上的极限力矩折算到起重
门座起重机基础知识46页PPT
谢谢!
门座起重机基础知识
11、不为五斗米折腰。 12、芳菊开林耀,青松冠岩列。怀此 贞秀姿 ,卓为 霜下杰 。
13、归去来兮,田蜀将芜胡不归。 14、酒能祛百虑,菊为制颓龄。 15、春蚕收长丝,秋熟靡王税。
61、奢侈是舒适的,否则就不是奢侈 。——CocoCha nel 62、少而好学,如日出之阳;壮而好学 ,如日 中之光 ;志而 好学, 如炳烛 之光。 ——刘 向 63、三军可夺帅也,匹夫不可夺志也。 ——孔 丘 64、人生就是学校。在那里,与其说好 的教师 是幸福 ,不如 说好的 教师是 不幸。 ——海 贝尔 65、接受挑战,就可以享受胜利的喜悦 。——杰纳勒 尔·乔治·S·巴顿
门座起重机课程设计
目录一,设计步奏二,门座起重机概述三,变幅机构四,运动分析五,设计小结六,参考文献一、设计步骤1、起重机械概述2、比较几种变蝠机构,各自特点等3、四连杆式变幅机构的运动学分析(解析表达式)4、用matlab软件将吊点轨迹、水平分速度、变幅力矩等曲线绘出(能力强的同学可做加速度分析内容——可加分)5、设计小结6、参考文献二、门座起重机概述1.简史门座起重机是随着港口事业的发展而发展起来的1890年,第一次将幅度不可变的固定式可旋转臂架型起重机装在横跨于窄码头上方的运行式半门座上,成为早期的港用半门座起重机随着码头宽度的加大,门座和半门座起重机并列发展,并普遍采用俯仰臂架和水平变幅系统。
第二次世界大战后,港用门座起重机迅速发展为便于多台起重机对同一条船进行并列工作,普遍采用了转动部分与立柱体相连的转柱式门座起重机(图1[转柱式门座起重机]),或转动部分通过大轴承与门座相连的滚动轴承式支承回转装置,以减小转动部分的尾径,并采用了减小码头掩盖面(门座主体对地面的投影)的门座结构。
在发展过程中,门座起重机还逐步推广应用到作业条件与港口相近的船台和水电站工地等处。
2.分类按用途可分为3类:①装卸用门座起重机:主要用于港口和露天堆料场,用抓斗或吊钩装卸。
起重量一般不超过25吨,不随幅度变化。
工作速度较高,故生产率常是重要指标。
②造船用门座起重机:主要用于船台、浮船坞和舣装现场,进行船体拼接、设备舣装等吊装工作,用吊钩作为吊具。
最大起重量达300吨,幅度大时起重量相应减小。
有多档起升速度,吊重轻时可提高起升速度。
有些工作机构还备有微动装置,以满足安装要求。
门座高度大者,可适应大起升高度和大幅度作业的要求,但工作速度较低,作业生产率不高。
③建筑安装用门座起重机:主要用在水电站进行大坝浇灌、设备和预制件吊装等,一般用吊钩。
起重量和工作速度一般介于前两类起重机之间。
它具有整机装拆运输性好、吊具下放深度大、能较好地适应临时性工作和栈桥上工作等的特点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
变幅系统参数——货物水平位移补偿
❖ 平行四边形组合臂架
▪ 通过由拉杆、象鼻梁、臂架与连杆所构成的平 行四边形,可保证货物在变幅过程中严格地走 水平线。
变幅系统参数——补偿滑轮组举例
❖ 确定臂架长度
L R
cos
▪ 根据最大幅度Rmax、最小幅度Rmin确定臂架长度, 幅度为Rmax时,臂架仰角ψmin宜取20°~40 °,幅度 为Rmin时,臂架仰角ψmax宜取60°~80 ° 。
变幅系统参数——货物水平位移补偿
❖ 补偿卷筒
▪ 将起升绳的另一端装在一个由变幅机构驱动的 补偿卷筒上.而补偿卷筒是与变幅卷筒同轴联 系的。在变幅过程中,补偿卷筒放出或收进一 定长度的起升绳.以补偿由于臂架摆动而引起 的货物升降,可近似补偿
❖ 补偿卷筒
图中:1 — 起升卷筒;2 — 变幅卷筒; 3 — 补偿卷筒;4 — 钢丝绳
变幅系统参数——货物水平位移补偿
❖ 补偿滑轮组的优点:
▪ 构造简单 ▪ 臀架受力情况比较有利 ▪ 臂架自重小 ▪ 容易获得较小的最小幅度
❖ 补偿滑轮组的缺点:
▪ 小幅度时物品悬挂长度大,摆动角度大
变幅系统参数——货物水平位移补偿
❖ 卷筒补偿的缺点:
▪ 起升绳的长度大,磨损快 ▪ 小幅度时物品摆动角度大 ▪ 用于大起重量起重机有一定困难
变幅系统参数——货物水平位移补偿
❖ 补偿滑轮
▪ 从卷简出来的钢丝绳,经过装在摆动杠杆上的 导向滑轮,然后通向臂架头部。装有补偿导向 滑轮的杠杆通过拉杆与臂架连接。在变幅过程 中,补偿导向滑轮位置的变化,使从卷筒到臂 架头部之间的钢丝绳长度的变化与吊钩随臂架 头部的升降相补偿,实现货物沿近似水平线移 动。
❖ 确定起升滑轮组倍率
▪ 根据起重量,选择起升滑轮组倍率mL=2~4 ,使钢
丝绳拉力在5~12 t。
变幅系统参数——补偿滑轮组举例
❖ 确定补偿滑轮组倍率、人字架起升定滑轮位置
▪ 列出货物水平位移表达式
y L si n t1 K 2 2 K si n) (D
m L
Kd
t mK
L
mL
DmLlQmklk 常数 ▪ 以补偿滑轮组倍率
▪ 为了使俯仰式臂架系统在变幅过程中臂架系统的 重心尽可能不发生升降现象,以免由于重心升降 时需要作功或吸收能量而引起变幅机构驱动功率 的增大,臂架系统的自重要用对重加以平衡。对 重或是直接装在臂架上,或是通过杠杆系统或挠 性件与臂架相连接。
变幅系统参数
设计原则
货物水平移动
使货物在变幅过程 中沿着水平线或接 近水平线的轨迹运 动,采用货物水平 位移补偿装置。
臂架自重平衡
使臂架系统的总重 心高度在变幅过程 中不变或变化较小 ,采用臂架平衡系 统。
变幅系统参数——货物水平位移补偿
绳索补偿型
•货物在变幅过程 中引起的升降依 靠起升绳绕绳系 统及时放出或收 进一定长度的起 升绳来补偿,从 而使物品在变幅 过程中沿水平线 或接近水平线的
人字架起升定滑轮位置
为变量,以 y=3%(Rmax-Rmin) 为目标函数进行优化
变幅系统参数——补偿卷筒举例
变幅系统设计——货物水平位移补偿
❖ 补偿卷筒举例
变幅系统参数——臂架自重平衡系统
❖ 杠杆式自重平衡系统
▪ 一般,如果货物水平位移补偿采用补偿滑轮组型 式或四连杆组合臂架型式,则大多采用由小拉杆、 平衡梁、活对重组成的臂架自重平衡系统。
变幅系统参数——货物水平位移补偿
❖ 四连杆式组合臂架
变幅系统参数——货物水平位移补偿
❖ 四连杆式组合臂架的优点:
▪ 货物悬挂长度减小,摆动现象减轻 ▪ 起升绳的长度和磨损减小 ▪ 起升滑轮组倍牢的大小对补偿系统没有影响。
❖ 四连杆式组合臂架的缺点:
▪ 臂架系统复杂和自重大 ▪ 臀架受力情况不好 ▪ 最小幅度比单臂架的大
变幅系统参数——货物水平位移补偿
❖ 补偿滑轮
▪ 采用滑轮补偿时,实现水平变幅应满足的条件是:
A B B A C ' B B 'C H
变幅系统参数——货物水平位移补偿
❖ 补偿滑轮的优点
▪ 起升绳的长度和磨损减小 ▪ 摆动杠杆可以兼作对重杠杆
❖ 补偿滑轮的缺点
▪ 臂架所受弯曲力矩较大 ▪ 难以获得较小的最小幅度。
轨迹移动。
货物水平 移动补偿
组合臂架型
•在变幅过程中 货物的水平移 动靠臂架端点 沿水平线或接 近水平线的轨 迹移动来保证
变幅系统参数——货物水平位移补偿
绳索补偿型
•补偿滑轮组 •补偿滑轮 •补偿卷筒 •连杆补偿滑轮组
货物水平 位移补偿
组合臂架型
•四连杆式组合 臂架
•平行四边形组 合臂架
变幅系统参数——货物水平位移补偿
❖ 补偿滑轮组
▪ 它的特点是在起升绳绕绳系统中增设一个补偿滑 轮组,当臂架从位置I转动列位置II时,货物和取 物装置一方面随着臂架端点的升高而升高,另一 方面又由于补偿滑轮组长度缩短,放出钢丝绳增 加悬挂长度而下降。如果在变幅过程中的各个位 置上.由于臂架端点上升而引起的物品升高值大 致等于因补偿滑轮组缩短而引起的货物下降值, 则货物将沿近似水平线移动。
门座起重机总体设计
内容提要
1
总体设计依据
2
变幅系统参数确定
3
变幅、起升机构参数确定
4
转台、回转机构参数确定
5
抗倾覆稳定性计算
6
轮压计算
7
圆筒门架、运行机构参数确定
总体设计依据
概述 工作级别 工作条件 主要技术参数
技术规格书
主要钢结构要求 机构及零部件要求
材料、加工工艺 电气及控制
总体设计依据
主要技术参数举例
❖ 四连杆式组合臂架
▪ 臂架系统是组合式的,它由臂架、象鼻梁和刚 性拉杆三部分组成,连同机架一起构成一个平 面四杆机构。如果臂架系统的尺寸选择得合适, 则在有效幅度范围内,象鼻梁的端点将沿着接 近水平线的轨迹移动。当起升绳沿着拉杆或臂 架到象鼻梁从其头部引出时,可满足货物水平 变幅的要求。这种方案在港口及造船门座起重 机上应用最广。
变幅系统参数——货物水平位移补偿
❖ 补偿滑轮组
▪ 采用滑轮组补偿时,实现水平变幅应满足的条件是:
HLm (L 1L 2)m K
▪ 式中:mL —— 起升滑轮组的倍率; mK —— 补偿滑轮组的倍率;
变幅系统参数——货物水平位移补偿
❖ 卷筒补偿的优点:
▪ 构造简单 ▪ 臀架受力情况比较有利 ▪ 容易获得较小的最小幅度