基于以太网的数控机床通信系统研究
《基于数控系统的EtherCAT主站的研究》
《基于数控系统的EtherCAT主站的研究》一、引言随着现代制造业的飞速发展,数控系统已成为自动化生产线和设备中的关键组成部分。
在数控系统中,EtherCAT(以太网控制自动化技术)作为主流的实时通信协议,因其高效率、高实时性和灵活性等优点,在工业控制领域得到了广泛应用。
本文旨在研究基于数控系统的EtherCAT主站的设计与实现,以推动工业自动化进程的进一步发展。
二、EtherCAT主站概述EtherCAT主站是EtherCAT通信协议的核心组成部分,主要负责管理和控制网络中设备的同步与通信。
EtherCAT主站具有高效的数据传输速率、灵活的拓扑结构和优异的实时性能,使其成为工业控制系统中重要的技术支撑。
在数控系统中,EtherCAT主站能够实现对多个轴的精确控制,提高生产效率和产品质量。
三、EtherCAT主站的设计与实现1. 硬件设计EtherCAT主站的硬件设计主要包括主控芯片、网络接口、电源等部分。
主控芯片负责处理EtherCAT协议相关的数据传输和计算任务,网络接口用于连接网络中的设备,电源则为主站提供稳定的电力供应。
此外,为了满足工业现场的复杂需求,EtherCAT主站还需要具备高可靠性、高稳定性和良好的抗干扰能力。
2. 软件设计EtherCAT主站的软件设计主要包括操作系统、EtherCAT协议栈和上层应用软件等部分。
操作系统负责管理硬件资源,提供稳定的运行环境;EtherCAT协议栈则负责实现EtherCAT协议的相关功能;上层应用软件则根据具体需求进行定制开发,实现对多个轴的精确控制、设备状态监控等功能。
四、关键技术与挑战在基于数控系统的EtherCAT主站的研究中,关键技术和挑战主要包括以下几个方面:1. EtherCAT协议的深入理解与应用:EtherCAT协议的复杂性和专业性要求研究人员具备深入的理解和丰富的应用经验。
2. 实时性与稳定性:EtherCAT主站需要具备优异的实时性和稳定性,以实现对多个轴的精确控制和设备状态的高效监控。
《基于EtherCAT总线的数控系统总线安全控制技术的研究与应用》
《基于EtherCAT总线的数控系统总线安全控制技术的研究与应用》一、引言随着工业自动化和智能制造的快速发展,数控系统作为现代制造业的核心设备,其安全性和稳定性变得尤为重要。
EtherCAT (Ethernet for Control Automation Technology)总线技术以其高实时性、高传输效率和高扩展性等特点,广泛应用于数控系统中。
然而,在高速、实时的工作环境中,如何保障数控系统的总线安全成为了一个重要的研究课题。
本文将就基于EtherCAT总线的数控系统总线安全控制技术的研究与应用进行探讨。
二、EtherCAT总线技术概述EtherCAT是一种基于以太网的实时通信协议,具有高实时性、高传输效率和高扩展性等特点。
在数控系统中,EtherCAT总线技术能够有效地实现多轴运动控制、数据采集、设备诊断等功能。
此外,EtherCAT总线的开放性和可扩展性为数控系统的升级和维护提供了便利。
三、数控系统总线安全控制技术1. 网络安全控制针对数控系统的网络安全问题,可以采用防火墙、入侵检测等手段对网络进行防护。
此外,对关键数据进行加密传输和存储,防止数据被非法获取和篡改。
同时,定期对系统进行安全漏洞检测和修复,确保系统的安全性。
2. 实时性控制在数控系统中,实时性是保证系统正常运行的关键因素之一。
为了保障实时性,可以采用EtherCAT协议的实时通信功能,实现数据的快速传输和处理。
此外,对系统进行实时监控和调度,确保各个设备之间的协调运行。
3. 故障诊断与容错控制通过在数控系统中嵌入故障诊断模块,实时监测设备的运行状态。
一旦发现故障,立即进行报警并采取相应的容错措施,确保系统的稳定性和可靠性。
同时,对故障进行记录和分析,为后续的维护和升级提供依据。
四、基于EtherCAT总线的数控系统总线安全控制技术的应用基于EtherCAT总线的数控系统总线安全控制技术已广泛应用于各种数控设备中,如数控机床、工业机器人等。
《基于数控系统的EtherCAT主站的研究》
《基于数控系统的EtherCAT主站的研究》一、引言随着制造业的飞速发展,数控系统在工业自动化领域扮演着越来越重要的角色。
EtherCAT(Ethernet for Control Automation Technology)作为一种高性能、高实时性的工业以太网通信协议,在数控系统中得到了广泛应用。
本文旨在研究基于数控系统的EtherCAT主站的设计与实现,探讨其在实际应用中的优势与挑战。
二、EtherCAT主站概述EtherCAT是一种实时以太网通信协议,主要用于工业自动化控制领域。
其核心思想是分散的实时以太网通信,具有高带宽、低延迟的特点。
EtherCAT主站是整个EtherCAT系统中的核心部分,负责控制整个系统的运行。
在数控系统中,EtherCAT主站通过与从站设备的通信,实现对机床的精确控制。
三、基于数控系统的EtherCAT主站设计1. 硬件设计基于数控系统的EtherCAT主站硬件设计主要包括主控芯片、网络接口电路、电源电路等部分。
主控芯片采用高性能的处理器,负责处理EtherCAT协议相关的计算和逻辑控制任务。
网络接口电路负责与从站设备的通信,实现数据的实时传输。
电源电路为主站提供稳定的电源供应。
2. 软件设计软件设计是EtherCAT主站设计的关键部分。
首先,需要编写EtherCAT协议栈的实现代码,包括数据链路层、应用层等部分的代码。
其次,需要设计主站的通信协议和数据处理流程,实现对从站设备的精确控制。
此外,还需要考虑系统的实时性和稳定性,确保在复杂的工作环境下,系统能够正常运行并保持高精度。
四、EtherCAT主站在数控系统中的应用优势1. 高实时性:EtherCAT协议具有高带宽、低延迟的特点,能够满足数控系统对实时性的要求。
2. 高精度:EtherCAT主站通过与从站设备的精确通信,实现对机床的精确控制,提高加工精度。
3. 灵活性:EtherCAT主站支持多种从站设备,具有很好的扩展性和灵活性。
基于实时以太网EtherCAT的数控系统研发的开题报告
基于实时以太网EtherCAT的数控系统研发的开题报告摘要:以太网在各个领域中的广泛应用,如工业、家庭、医疗等,不断推动着其技术的发展和完善。
在工业领域中,以太网作为实时控制的通信手段得到了越来越广泛的应用。
而EtherCAT则是基于实时以太网技术的一种开放式高性能工业网络通信协议。
本文主要研究基于实时以太网EtherCAT的数控系统,通过对EtherCAT协议、数控系统的基本原理和相关技术的研究,提出一种基于EtherCAT协议的数控系统设计方案,为数控系统实时通信的研究提供一定的参考。
关键词:以太网,EtherCAT,数控系统,实时通信一、研究背景数控系统是现代机械制造行业中必不可少的系统之一,其能够通过计算机程序控制机床进行高精度、高效率、高灵活性的加工。
然而,传统的数控系统通常采用RS232、RS485等串口通信手段,通信速度慢、稳定性差,无法满足实时性要求。
而随着以太网技术的发展,以太网逐渐成为了数控系统实时通信的有力替代品。
EtherCAT是一种基于实时以太网技术的网络通信协议,采用Master-Slave架构,具有通信速度快、实时性好、支持大规模节点、可实现高精度的同步等特点,已经被广泛应用于工业控制、自动化等领域,成为实时以太网技术的一种代表。
二、研究目的和意义本文旨在研究基于实时以太网EtherCAT的数控系统,通过对EtherCAT协议和数控系统基本原理进行研究,提出一种基于EtherCAT协议的数控系统设计方案,使其能够满足实时通信的要求,并能够与传统数控系统互通。
三、研究内容和方法1. EtherCAT协议研究① EtherCAT协议的概念、特点和架构;② EtherCAT主站和从站的通信机制;③ EtherCAT数据帧结构和传输方式。
2. 数控系统研究①数控系统基本原理;②数控系统实时通信的要求;③数控系统通信协议。
3. 基于EtherCAT协议的数控系统设计①数控系统的硬件和软件平台;② EtherCAT网络的拓扑结构设计;③ EtherCAT主站和从站的程序设计;④数控系统实时通信的测试和性能分析。
基于工业以太网的数控机床网络控制系统

基于工业以太网的数控机床网络控制系统将创造车间的数控设备与计算机联网构成DNC(DistributedNumericalContro1)系统,已成为实现CAD/CAM一体化及计算机辅助生产管理集成化迫切需要解决的核心技术之一。
而通信网络的实现又是构建集成DNC系统的最关键的技术,它普通包括两个层次,上层是DNC主机与CAD/CAM/CAPP、 MRPII系统币睥间服务器的通信,下层是DNC主机与车间各种数控设备的通信数控机床联网的办法无数引,如串行通信办法口、MAP通信技术、现场、以太网等。
这些通信办法虽然在一定程度上实现了数控机床的联网,但在应用中它们或多或少地存在一些不足。
为了提高数控机床联网控制系统的可集成性和满足实时调度功能,笔者提出了基于工业以太网的数控机床联网控制系统。
1 系统结构系统的结构主要按照实际需要而选定,需要考虑的因素主要有车间的环境、工厂的程度与管理层的信息集成等。
系统采纳工业以太网作为网络平台,工业以太网的抗干扰设计保证了在车间恶劣劣环境下的通信畅通及实时性,且易于与管理层集成。
系统采纳总线+星型的拓扑结构。
主干网采纳总线结构,易于组成冗余环网。
局部采纳星型结构,避开了某一台设备的故障影响其他设备。
系统的拓扑结构1如示。
实现数控机床和工业以太网衔接的协议转换器实质就是工业以太网数据包与RS232数据包的转换器。
它向上接人工业以太网,采纳工业级RJ45接口形式,向下衔接带有RS232串口的数控机床。
协议转换器可以作为数控机床的一个部件安装在机床上。
2 系统功能2.1通讯功能(1)NC程序的双向传输全部数控设备实施联网集中管理,利用网络举行NC程序(包括机床参数,刀补文件,宏程序等)的双向传输,从第1页共4页。
数控机床联网的应用与研究
轮、 挡块 、 限位开关等硬件 , 因此它可加工普通机床 无法加工的复杂零件 、 从而具有降低成本 、 提高生产 效率、 减轻工作强度 、 改善环境 、 易于管理等大量优 点, 为此数控机床将逐步取代普通机床正逐渐成为
机构装配图如图 3 所示。 本机构在正常运行的前提条件是 , 当机构处于
减小该部位的负荷 。
任何位置时 , 输入轴、 出轴及 T型传动臂 的轴心 输 线交于一点 C △A C处成立且保 持形状不变 。要 , B 做到这一点 , 首先需要通过零件的/ -精度来加以 jv n_ 保证。在零件精度得到保证 的前提下 , 装配精度是
保证机构正常运行的另一关键。在装配时, 首先要
参考文献
T型传动臂对拔叉的撞击。因此在装配时对旋转销
轴采用由力矩螺母加以锁紧 , 对其施 以一定量的预
l 杨可桢 程光蕴 主编. 机械设计基础 , 9. 1 9 9 2 薛金秋 . 化纤机械 [ . 京 : M] 北 中国纺织 出版社 ,99 19 .
要时可采取点焊方法加 以固定 , 然后校正输入轴与
6 1 本机构改装飞轮后, . 往复运行平稳 , 无冲击 , 摆 动幅度与输入轴转速无关 。
62 定期检查飞轮联接块与联轴器及相关紧 固件 .
机架之间的位置, 通过加垫片和调整轴承间隙的方
法使输出轴 、 轴承间隙适当时 , 其叉脚孔的中心线与 输入轴的中心线等高 , 最后将 机构 的其他零件调整
构各零件处于最佳装配位置即可。由于机构在运动
63 曲柄箱体 内的装景属关键部位 , . 其多数零件均 是高强度材质 4 CMo制造精度高 , 2r , 反之会造成设 备零件磨损 , 重者将使机构无法正常生产 。
64 本机构大部分运行时间都处于高角加速度运 . 行状态, 能产生较大的搅拌剪切 。
基于交换式以太网的网络化数控系统研究
基于交换式以太网的网络化数控系统研究【摘要】交换式以太网推动了以太网在网络控制系统中的应用和发展,成为网络控制系统新的发展方向,对于数控系统这种特殊的控制系统来说也不例外。
本文提出了一种面向多对象和多用户的网络数控服务系统体系结构,论述了系统各组成部分,重点讨论了网络数控服务系统中各通信任务的协调设计,并通过实验证明了设计方案的有效性和稳定性。
【关键词】交换式以太网数控服务引言数控系统必须满足网络化的要求,数控设备的形态已逐步发展为整个企业网络中的一个能进行感知、处理、传输并自动执行的节点,本文的研究就起源于交换式以太网技术应用于数控系统中所面临的实际问题。
当交换式以太网的拓扑结构和交换机的情况已经确定时,除了各端节点的通信带宽分配策略,在实际的网络系统设计中,另一个影响系统性能的因素就是主节点(如主控单元、核心服务器)上各通信任务的协调[1]。
在应用层面,数据的产生和通信的发起是随机的,所以在这一层面也需要考虑多个通信任务对信道的共享问题,另外各类任务之间也存在对主节点计算资源的共享问题。
本文以工业控制中的一个典型应用——网络数控服务系统为对象,有针对地对实时系统设计与实现过程中各通信任务之间以及通信任务与其他任务之间的协调设计问题进行分析。
2 系统结构网络数控服务系统体系结构如图1所示。
每个机床配备有少量的、必须的、功能简单且单一的控制器,如运动控制、伺服驱动、PLC等,它们通过现场总线、网络构成了机床的基本数控单元(但非完整系统),这些基本数控单元通过交换式以太网与功能丰富、提供更强处理能力的数控服务系统相连,从而获得机床加工所需的完整数控功能[2-3]。
对机床的操作,由远程数控客户端(专用客户端或通用浏览器)通过交换式以太网连接到数控服务系统进行。
整个系统主要包括如下几个控制模块:(1)面向多控制对象的数控服务系统(NC service system, NCSS),负责多台机床的数控操作管理和业务处理。
《基于数控系统的EtherCAT主站的研究》
《基于数控系统的EtherCAT主站的研究》一、引言随着工业自动化技术的快速发展,数控系统在制造业中扮演着越来越重要的角色。
EtherCAT(Ethernet Control Area Network for Automation Technology)作为一种高性能、高精度的实时以太网通信协议,在数控系统中得到了广泛应用。
本文旨在研究基于数控系统的EtherCAT主站,探讨其技术原理、系统架构及在数控系统中的应用。
二、EtherCAT技术原理EtherCAT是一种基于以太网的实时通信协议,其核心技术在于主从站之间的数据交换。
EtherCAT主站负责发送控制命令和接收从站的状态信息,从站则根据主站的命令执行相应的动作。
EtherCAT协议具有高实时性、高精度、高灵活性等特点,能够满足数控系统对高速、高精度的要求。
三、基于数控系统的EtherCAT主站系统架构基于数控系统的EtherCAT主站系统架构主要包括硬件层、驱动层、服务层和应用层四个部分。
硬件层包括主站控制器、网络接口等;驱动层负责与硬件层进行交互,实现EtherCAT通信协议的驱动;服务层提供主站的功能服务,如数据管理、运动控制等;应用层则是根据具体需求开发的应用程序。
四、EtherCAT主站在数控系统中的应用EtherCAT主站在数控系统中的应用主要体现在以下几个方面:1. 高速高精度控制:EtherCAT协议的高实时性和高精度特点使得主站能够实现对机床的高速高精度控制,提高加工效率和加工质量。
2. 灵活性:EtherCAT主站支持多种类型的从站设备,能够实现不同设备之间的互操作性和扩展性,为数控系统的升级和维护提供了便利。
3. 网络化:EtherCAT主站采用以太网作为通信介质,能够实现数控系统与其他设备之间的网络化连接,提高系统的可靠性和可维护性。
4. 智能化:通过与人工智能、大数据等技术的结合,EtherCAT主站能够实现对机床的智能监控和故障诊断,提高系统的智能化水平。
基于以太网的计算机与数控系统通信技术
o u t p o r t b ( L CONT -p o r t , 0 x 8 0 1 : o u t p o r t b ( B DR o f t , b a u d ) ; o u t p o r t b ( B DRH—_ p o r t , 0 x 0 0 ) : o u t p o r t b c L CONT o f t , 0 x l e ) ;
以太 网技术是当前最 常使用的一种 计算机网络技术 ,因此针对车间的局 域 网, 我们也就 可以通过 以太网技术构成 。它能够有效 的降低其构建的成本, 并在车 间生产工作中得到广泛的应用,这 技术受 到了业界人士的高度重 视 。当组 建好局域网之后 , 技术人员可以采用T CP / I P 通信协议进行连接, 使 之变成 一个拓扑结构 , 这样也就能够有效的提 高服务器 的容量 。 在企业 的生产车间当中, 为 了提高DNC系统的抗干扰能力及运行的稳 定性 , 技术人员可以将超五类屏蔽双绞线对车间的网络进行组建, 还需要在 DNC系统 的相关设备表面密封 一个金属外壳 , 这样可 以有效的提高其抗十 扰能力 。另外, 针对车 间内服务器较远 的机床, 我们可以采用级联式 以太网 交换机的方式来增加 网络信息数据传输 的距离,这样可 以保证数据传输的 精确性, 以保证车 间内的正常生产 。 在车『 自 J 内, 还涉及到智能终端与数控系统之间的网络 , 技术人员可以采 用RS - 2 3 2 C串行通 信网络进行连接 , 这样 可以提高 网络 的通用性 , 也便于 后期管理人员对整个 网络 的管理, 实现数字化、 信息化水平 。 2 、 DNC智 能 终 端平 台 的选 择 随着社会的发展 以及技术水平的提 高, 嵌入式技术得到 了显著的发展, P c机技术作 为嵌入式技术 中的关键技术 , 也得到 了飞跃 的发展, P C机由 于 具有体积小、 能耗低等优 点, 因此在实际工作 中得到了广泛 的应用 。我们在 选择 D NC智 能 终 端 平 台 的过 程 中 , 首 先 必 须 要 对 其 通 信 功 能进 行 全 面 分 析, 要 求 该 智 能 终端 平 台具 有 较 好 的兼 容 性 , 这样 才 能够 在 车 间 中充 分 发 挥 作用 , 才能够保证信息传输 的准确性 , 另外 , 在选择并建立DNC智能终端平 台的过程中 , 还必须要求其具仃抗丁扰 能力, 以便于后期的管理丁作。
基于实时以太网的高性能多轴数控系统
此基础 上开 发 了实 际系统 , 并在 国产 数控 机床 上进 行 了应 用 。应 用 结 果表 明 , 提 出 的新体 系结 构 所 具 有 显著技 术经 济优 势 , 据此开 发 的实 际系统 运行 可靠 , 具有 良好 的应 用前 景。
数控系统以太网通讯的设计
的 , 能充 分地 保 证 系统 性 能 , 件 的通 用 性强 , 且 它 软 并 编 程 处 理 灵 活 ; 软 件 化 NC是 以 P 全 C为 基 础 , 动 控 运 制全 部 由软 件实 现 , 过 P 通 C机 上 扩 展 槽 的 伺 服 接 口 卡  ̄- 服 驱 动 等 进 行 控 制 。 文 介 绍 的 数 控 系 统 方 案 - j , 伺 本 不 同于上 述几 种 , 控系 统 由 P 数 C和 运 动 控 制 器 组 成 ,
嵌 入 的高 速 F ah存 储 器 , 持 扩 展 片 外 F ah和 片 外 ls 支 ls
RAM 。 P 2 7 带 有 1 /1 0 E h me L C 38 0 0 M te t MAC 接 口 , 有 并 DMA 控 制 器 。 L 2 7 以 太 网 模 块 的 结 构 如 图 2 示 , 要 特 征 PC 3 8 所 主
1 系统设计
目前 开 放 性 数 控 系 统 成 为 数 控 系 统 发 展 新 的 方 向 , 放 性 数 控 系 统 有 P 嵌 入 NC、 嵌 入 P 运 动 开 C NC C( 控 制 卡 加 P 和 全 软 件 化 NC 三 种 。 C 嵌 入 NC 是 把 C) P 专 用 结 构 的 NC 和 P 机 专 用 的 总 线 连 接 , 部 分 仍 C NC 采 用传 统 的数控 技 术 ,C只作 为 简单 的人 机 接 口 , P 不
网 络 实 现 连 接 和 通 讯 。 果 采 用 基 于 T P/ P 的 以 太 如 C I
网通讯 方 式 , 易于 与 上层 网络 连 接 , 现 远 程 编程 、 就 实
基于以太网的数控系统实时通信和时间同步_张向利
第14卷第6期计算机集成制造系统Vol.14No.62008年6月Computer Integrated Manufacturing SystemsJ une 2008文章编号:1006-5911(2008)06-1148-07收稿日期:2007208206;修订日期:2007210225。
Received 06Aug.2007;accepted 25Oct.2007.基金项目:国家973计划资助项目(2005CB724100);湖北省重大科技专项资助项目(2006DA E104);广西自然科学基金资助项目(0832246,0832084)。
Found ation item :Project supported by t he National Basic Research Program ,China (No.2005CB724100),t he Specialized Science &Technology Foundation of Hubei Province ,China (No.2006DA E104),and t he Guangxi Provincial Natural Science Foun 2dation ,China (No.0832246,0832084).作者简介:张向利(1968-),女,陕西渭南人,华中科技大学国家数控系统工程技术研究中心博士研究生,桂林电子科技大学计算机与控制学院副教授,硕士生导师,主要从事计算机应用、数控技术等的研究。
E 2mail :xlzhang @ 。
基于以太网的数控系统实时通信和时间同步张向利1,2,唐小琦1,陈吉红1(1.华中科技大学国家数控系统工程技术研究中心,湖北 武汉 430074;2.桂林电子科技大学计算机与控制学院,广西 桂林 541004)摘 要:为实现基于以太网的数控系统运动控制层的实时通信和精确时间同步,对避免时间片冲突的实时通信算法和基于精确时间协议的同步算法进行了优化处理。
基于以太网的fanuc数控机床dnc系统开发
·20·兵工自动化Ordnance Industry Automation2019-1238(12)doi: 10.7690/bgzdh.2019.12.006基于以太网的FANUC数控机床DNC系统开发孙科星1,李 璀2,刘治红1(1. 中国兵器装备集团自动化研究所有限公司智能制造事业部,四川绵阳 621000;2. 陆军装备部驻重庆地区军代局,重庆 400000)摘要:针对目前数控机床生产与管理环节存在的信息交互困难、过程不透明和运行效率低下等问题,并适应工厂柔性制造技术的发展,设计一套基于以太网的FANUC数控机床DNC系统。
以C/S结构作为应用框架,应用ORACLE数据库进行机床数据管理,利用工业以太网进行通信,基于.NET平台,使用C#编程语言,任务处理采用多线程并发模式读取机床数据。
结果表明:该系统能提高机床程序与数据的管理效率,实现工厂生产过程的精细化、数字化和信息化管理。
关键词:FANUC机床;以太网;DNC;数字化中图分类号:TP274 文献标志码:ADevelopment of FANUC CNC Machine Tool DNC System Based on EthernetSun Kexing1, Li Cui2, Liu Zhihong1(1. Department of Intelligent Manufacture, Automation Research Institute Co., Ltd. ofChina South Industries Group Corporation, Mianyang 621000, China;2. PLA Military Representative Burean of Army Equipment Department in Chongqing, Chongqing 400000, China)Abstract: Aiming at the problems about rough information exchanging, opaque process, low operating efficiency in the production and management in CNC machine tools, and in order to adapt to the development tide of flexible manufacturing technology, designed the DNC system based on FANUC CNC machine tools. The system utilizes the ORACEL database to manage the data of machine tools, and the C/S structure is used as an application mode to ensure the security and efficiency of communication. Use industrial Ethernet for communication, the system is based on the .NET platform, utilize the C# programming language, and the task processing adopts the multi-threaded concurrent mode. The results show that the system can improve efficiency of the machine tool program and data management and realize refinement, digitization and information management of the factory manufacturing process.Keywords:FANUC-CNC machine tools; Ethernet; DNC; digitization0引言我国经济健康稳固发展得益于工业水平的不断提高。
基于以太网的数控系统现场总线技术研究
其中,EtherNet/IP是一种基于以太网的现场总线标准,它具有高速、稳定、 易于扩展等优点。而PROFINET则是一种基于以太网和实时以太网技术的现场总线 标准,它具有高速度、高可靠性、高扩展性等优点。
二、工业以太网技术
工业以太网技术是一种应用于工业领域的以太网技术,它具有高速、稳定、 可靠等优点。与传统的现场总线技术相比,工业以太网技术具有更高的传输速度 和更低的传输延迟,能够更好地满足现代工业的需求。
背景:
以太网技术是一种广泛应用的计算机网络技术,具有高速、稳定、易于组网 等优点。随着以太网技术的发展,其在数控系统现场总线领域的应用逐渐受到重 视。以太网数控系统现场总线技术能够满足现代工业控制领域对于数据传输速度、 可靠性和稳定性的高要求,有助于提高生产效率和产品质量。因此,对于以太网 数控系统现场总线技术的研究具有重要的现实意义。
技术原理:
以太网数控系统现场总线技术是以太网技术应用于数控系统现场总线领域的 一种新型技术。它结合了以太网和现场总线的优点,能够实现高速、可靠、远距 离的数据传输。在以太网数控系统现场总线中,CNC协议和TCP协议是两个重要的 技术原理。
CNC协议是一种用于数控系统通信的协议,能够实现数控系统与外部设备之 间的数据传输和控制。在以太网数控系统现场总线下,CNC协议可以通过将以太 网协议封装在TCP/IP协议中进行传输,从而实现高速、可靠的数据传输。
以太网数控系统数字接口技术的研究是一个不断深入和发展的过程,其涉及 到多个领域和技术的交叉融合。未来的研究不仅需要技术的实现和应用,还需要 从系统层面考虑如何更好地优化和提升数字接口技术的性能和可靠性。也需要不 断适应数字化制造和智能制造的发展趋势,推动数字接口技术在更深层次和更广 领域的应用。
计算机数控系统通信技术

计算机数控系统通信技术计算机数控系统通信技术计算机数控系统通信技术摘要:当下数控机床被广泛的应用,其加工的程序也开始不断扩大、精准率不断提高,其计算量也随之扩大,所以传统的数控系统的手工的输入方式已经不能满足日益增长的需求,所以必须要对数控机床的通讯技术进行研究,以满足当下各方面的快速增长的需要。
关键词:以太网;计算机;数控系统0 引言DNC系统是计算机的直接数控、分布式的机床的管理,是计算机与具有数控装置的机床群使用计算机网络技术组成的分布在车间中的数控系统,该系统对用户来说就像一个统一的整体,系统对多种通用的物理和逻辑资源整合,可以动态的分配数控加工任务给任一加工设备。
是提高设备利用率,降低生产成本的有力手段,是未来制造业的发展趋势。
随着计算机技术的不断发展,DNC系统已经逐渐成为当前车间中连接机床的网络工具,提高数控机床的使用效率,提高企业的劳动率,实现车间的网络化。
当下数控机床被广泛的应用,其加工的程序也开始不断扩大、精准率不断提高,其计算量也随之扩大,所以传统的数控系统的手工的输入方式已经不能满足日益增长的需求,所以必须要对数控机床的通讯技术进行研究,以满足当下各方面的快速增长的需要。
1 DNC网络的构建1.1 通信系统的结构DNC的控制系统的网络结构主要由三层构成,第一层是服务器,第二层是DNC的智能终端系统,第三层就是数控机床。
而车间的忘了则主要包括两个部分,第一个部分就是车间的服务器和DNC 系统的智能终端相互构成的局域网,另一个部分就是DNC的智能终端系统与数控设备之间的通信网络。
在局域网中,都是采用的以太网进行的组网,以太网是目前最受欢迎的一种计算机网络技术,其低廉的价格和应用的广泛等因素,成为当前开发商和生产商的青睐。
当前的局域网中采用的都是IP或者TCP通信协议,这种通信协议通过以太网在工业中建立成一种星型的拓扑结构,为车间中的服务器连接的数控设备的容量大大的增加。
车间的电磁辐射非常大,容易对系统造成干扰,所以就有必要对系统的抗干扰的能力和稳定性进行加强。
基于ARM的100Mbits以太网在数控系统中的应用.
基于ARM的100Mbit/s以太网在数控系统中的应用摘要:本文通过设计ARM芯片S3C4510B与网络物理层芯片RTL8201BL的软、硬件接口,实现了下位机和PC机之间基于UDP/IP协议的通信。
克服了采用串口通信的一系列弊端,通过一根网线就可以轻松实现PC机和下位机控制器的数据传输。
通信速率可达100Mbps满足控制系统对实时性的要求。
在通信线路简单可靠的基础上采用UDP/IP协议代替TCP/IP协议不仅提高了数据的传输效率也大大简化编程的复杂度。
关键词:ARMS3C4510BRTL8201BLUDP/IP协议PE68515 摘要:本文通过设计ARM芯片S3C4510B与网络物理层芯片RTL8201BL的软、硬件接口,实现了下位机和PC机之间基于UDP/IP协议的通信。
克服了采用串口通信的一系列弊端,通过一根网线就可以轻松实现PC机和下位机控制器的数据传输。
通信速率可达100Mbps满足控制系统对实时性的要求。
在通信线路简单可靠的基础上采用UDP/IP协议代替TCP/IP协议不仅提高了数据的传输效率也大大简化编程的复杂度。
关键词:ARM S3C4510B RTL8201BL UDP/IP协议PE685151 概述串口通信技术在数据通信中的应用极为广泛。
但是,其固有的通信距离小、抗干扰能力差等缺点使其无法满足对实时性要求较高的现代工业控制。
随着近年来网络技术和以ARM为代表的32位处理器的发展,通过网络实现ARM与PC机高速、可靠的通信已成为可能。
本文的主要目的是设计一种高速、可靠的通信方式,实现PC机和数控系统的数据传输,克服传统串口通信传输距离短,速度慢的缺点。
本设计采用三星公司以ARM7为内核的S3C4510B芯片,通过RTL8201BL和网络变压器PE68515实现和PC机的通信。
2 ARM芯片S3C4510B 简介S3C4510B是基于以太网应用系统的高性价比16/32位RISC微控制器,内含一个由ARM公司设计的16/32位ARM7TDMI RISC处理器核。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Õ¯K°|m #$% OPmnop\Sà + áâ !Þw¡%¢+K°|§[m‘ãä¦" åãä¦æç·K° |moèéêëìíî! ïðæç·moèéêëì íñK°| " ò #$% noOPQRmãä¦óôn o-ئ ! »Þõ‘no+K°|nom|Ç ! å J%O + &’()*+,-. K°|-Øö÷È? ! ¨©K°|[ # no [+oèíÛíE !» &.KLK [^KÚ[§[¡ -%¢m! øoèíÛ+%¢moùlús§[Þwo ùmlú" no-ئ^Kô¡-%¢mabûÉüý;¡ -%.þ!n ôno-ئÿ£ PQ ë !" ^2¡-%¢?ô z{|mab#u !$ ø%©z{|mû &’( "
+{
%a²&
:±=>
:v *6B b{
b{ 2 A TU;<VWö ~K
! ! !
!"#$% (!"#$%&’)
CNC Internet/Intranet I/O RS232
5 _&$ x ! - ± !68 O _ + ! _ + ï !$%6S--)$’04 -&B ¢ ßñ " 5_ +Ow x!. !68 ]xcú x" +_&$б./x !* ! !68 åO !$%&)-504-&¤&$O !68 Qìí ! . ìí ¾O&$H./0= ù !*! .8 å-&¤&$./ " &$ O +,ï !68 +,- & !$%2)$),3) 04 ß ñ ! & $ + , - & !$%2)$),3)04*! !$%.-%/’04 -&+,AO !68 &$ r 1ú 67 ! IÙ 6 ! &$ DåO !68 +,*! " !68 &$O+, } # x°.m {8 a ;<ï !68 ’ (¦ !$%&’(’)*($+,-)045 !68 ]xcO3F;<ßñ " -& !$%6?)(’)&S$\)’04 !68 34O Ó ! Zd O # ÷Oôm&$~KO Óu ¡ " -& !$%6TSF)&S$\)’04!
!"#$%&’()*+,-%./0123! 4567 89:;,-&<=>?@(ABC ! DEFGHIJKLM #$%!#;4013 $F:04;156 %823486 N #;=34;9F30D $F:04;156 %823486" O P/QR! STLMUV%W,-%.XY(Z[K\]^_ / #$% OP‘abcdef/gh " ij #$% OPkQl3 mnop\qrstuvp\#wxyJp\+z{|p\"u tuno‘}~Y3manop\! 3,-% .Dm &.KLK N &.M)N no[ !aU$%ta ,-%.!nov;wx~-% # ? # +~u" wxyJno‘ 3wxyJ\L | ! n ;wxyJ+¡-%¢Y£¤¥¦§[¨© no[m%¢!;p\ª«#p\¬ ®gh " z {|p\kQ3¯¨©|[m%¢!©K°|#±²³| +±²yJ®´v "ijYµ¶·¸¹mkº&’‘K°| ! »¼¨©m½¾¿+ÀÁ¿ÂKÃÄÅbOPm^_¿ ! WXÆÇm|ÈÉmÊË+ÌÍÀÎmª«¿:ÏÐ Ñ" ÒÓ !Ôl3Õ¯K°|mz{|v #$% nop\ !\L Ö &.KLK WK°|×Zmno-ئ ! 2Ù¡-%¢^K Ú[[ÛY| ! ÜÃÄÖOPm^_¿ ! ÝÐÑÖ #$% m Þß?"
!"#
!"#
!"#$%
!"# !"#$%&
!"# !"#$% !"#$% RS232 !" !"#$% !"# CNC !" CNC !" !"#$% !"#$% RS232 !" !"#$%
!"#$
!"#$
* 引言
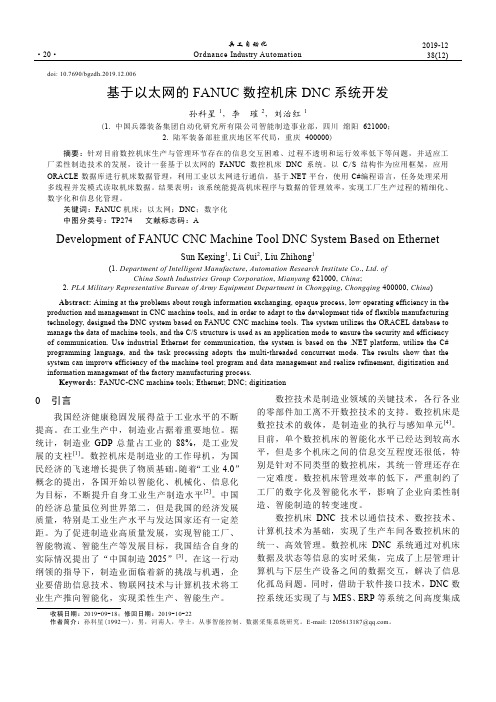
! 1 !"#$%&’(%) DNC !"#$%&’()
您的论文得到两院院士关注
中 文 核 心 期 刊 ! 微 计 算 机 信 息 " ! 测 控 自 动 化 "#$$% 年 第 #& 卷 第 % 期
基于以太网的数控机床通信系统研究
!"#"$%&’ () *(++,)-&./-() 01#/"+ (2 3* 4$&’-)" 5((6 7.#"8 () 9/’"%)"/
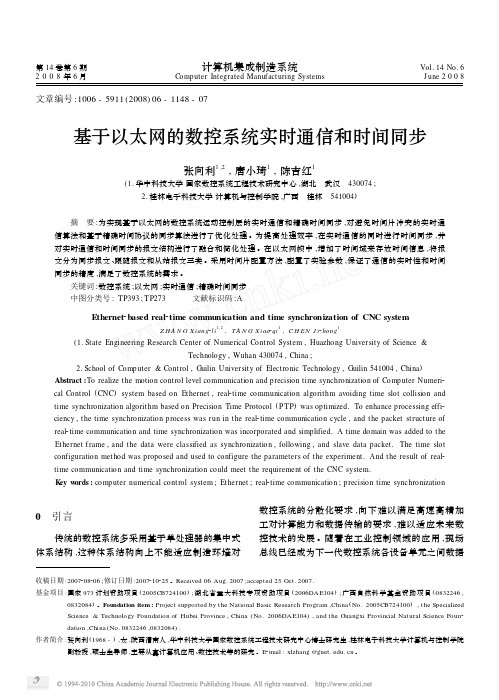
4 !"# 通 信 系 统 的 信 息 流
Õ¯K°|m #$% noOPmoùº)* Sà K áâ" Ò ôoùº + \ ,- Ö #$% OPm^ . *¿ ! ôÓ ! l3å /0 12 # Y3¬ãä¦ # 32 ¡ 45 ãä¦È?m H48?=04R .04@04 ) vm 6 ¬ &7 v 8 Op\ " »¡-%¢Æ 9 ¯UV %:2!no-ئÆ9 ¯¡-%¢où¤;!Þw¡-ÌÍ m|Î< +[=# ¡-ÌÍmÎ<+[ =K> %¢ ? É mÎ < !ïð @ ‘ab A Ûv S09 ãä¦ ! ÞðÎ 7 %¢ BC où " ¡ 4 S09 ãä¦3¯¡ 4 m &D # E %¢ ? É+¡ÌÍ ! ø #$% no F GHI ? J UV%+ #$% -ئY ¡-ÌÍm|ìí "
! 2 !"#$%& DNd¤ NKJK< BC:34O¤ BC:fg:vTUO½äå! æB?BC:TU O¤çèBC:é9ORê"BC:&$ëOìí # î#G,#./ï 2!P:;<=>& =>ðßñO" fgOãd ò± ¡Þ 2!P:;<=>& O;<óôõfg&$O./m G,¡£ 2!P:;<=>& ö&$÷øùúûü " 2!P:;<=>& ýþ9 C*>Q2)RS’) C*>4 Uÿm h ! C*> 0PS$(T C*>4 U ÿ " # ö " h ! C*> ß ñ 2!P:;<=>& $ :v % O&$ &’ !ã ( fg,.&$ ) Ð 9 C*> *¡" +ò67c0>!*UV><J:P4±,BC:v./&$x !-. ë %W?(R)&&$/ ~9 C*> Uÿ !/A 2!P:;<=>& ÙO. / 0 ÷÷ 02,-X E/YY)?4! 1 ¾. 2 / 34 !2!P:;<=>& 5 / 67ëO&$¾ 8ú}ëO./" 2!P:;<=>& +,AO& $T~ *>6 9: #626 ;< ¾ !ï WIWZ ÷A+, 0= ù !, > ë¾!BÙ?@0÷cAÁO¢QTB ò67c" NKJKJ !68@.8 34O¤ ïk !68@.8 34 C O D:E !JPHQfg F( Ú G
接口与通信
:;<=> 2!9:;<=>& ?&$@.ABC:D !EFBC:G H .-’)?-)’!IJKLMNOPHQ !68@.8 RS " TU;<VW XKY2 A Z[" D\TU;<VWOR]^_‘!abcde! fgLh i !jkl.mnoOpq " rst .8#!68#BC8#.6*8#D!!8 m >28 u:v34 !wxyz <;@<;;E(F)G! :v+{ !|Gs t H’+)?-)’ IHHH:;JKA 34" }a!T~fgO 2&JAJ +{!s L)M !Bx #([;< ;qO&$"
K !"# 系 统 通 信 控 制 器 设 计
OPno-ئl3ÖÕ¯ &P.% p\m -T& K ÷% -’:0C56K)(!L©÷þ U(-.V ÌÍ M ¦ !¨©;OP N Ì #O P’( !l3 %QO Q º R Jv >K ð STUV ± !á© PRW W ^Kn NÌXYÿ£" no-Ø)Zl3[ävÞ w! 3 F%RW.E! Þð A Ûv \ OPt ]^ v [ äm _‘ ç& ÿa b [ äm b^c !n F%RW.E! DmoèÞw a [ äXYmno " K ÷%; d ¡ 4 lúN I ? PR* -Ø [ ä mïð!e ^ I ? P2304203 fgh " ;3¬l3 V’’Q fg ô K÷%OPWz{| :2XYmnifg! 3K°
您的论文得到相关企业家品评
H : e " ZB ! IJ !Ù KLM $ J !O^ NOP !68@.8 34úQRm ST" 5&;¦§9;O IJ! Ù ! 2&JAJ +{O O6 9u&$‘! !68 úT U " !68 !68@.8 34 V Ù½ WX O34!± "YZ[ 67 \ ËO # ‘!]^ .8 _ +¦<O¦c ‘ ³OTUyz ^ O # ^_8a;<O#bAb O&$8cd" efE &^O3 4 g !!68 ‘! ’h x°¦< (%!,R)S/’ [,’+ 2)’?(-FR,FF,S-& £¤i ^j" 5Kª !68 xkl®¯mnopqi5&$ rstu # v < # wx # ./ ]yz O&$x {1 | N } ú &$ "