第6章反馈控制电路.ppt
电子技术06第6章电力电子器件及基本电力变换电路课件

V1,4导通,u0=Ud
u G1,4 u G2,3
t
VD2,3导通,u0= -Ud
t
V2,3导通,u0= -Ud
uo io
t3
t4
t 5
VD1,4导通,u0= Ud
t1
t2
t
控制信号 开V1,4,关V2,3 开V2,3,关V1,4 开V1,4,关V2,3
器件导通情况 VD1,4 V1,4 VD2,3 V2,3 VD1,4
数量关系
Uo
ton ton toff
E
ton T
E
E
Io
Uo
EM R
Ton / T
续流二极管
不希望电流断续
负载 上的 反电 动势
电流连续
动态演示
电流断续
6.3.2 升压斩波电路 (Boost Chopper)
1) 升压斩波电路的基本原理
电路结构
工作原理 假设L和C值很大
V通态,E向L充电,I1恒定,C向R供电,Uo恒定。 V断态,E和L同时向C充电,并向负载提供能量
6.1 常用电力电子器件
按照器件被控制信号所控制的程度,可做如下分类
半控型器件(Thyristor)通过控制信号可控制通,不能控制关 全控型器件(IGBT,MOSFET) 通过控制信号既可控制通又可控制
关又称自关断器件 不可控器件 (Power Diode) 不能用控制信号来控制其通断, 不需要
驱动电路
注入区
C
ID RN V-J1+ IC
C
-+
+
-IDRon
G
E
b)
c)
场控器件,原理与电力MOSFET基本相同,通断由栅射极电压uGE决定。
反馈控制电路原理详解
如鲁棒控制、自适应控制等,这些 控制策略能够自动适应系统参数变 化和外部扰动,提高系统稳定性。
04
频率响应与滤波器设计
BIG DATA EMPOWERS TO CREATE A NEW
ERA
频率响应概念及意义
频率响应定义
描述电路或系统对不同频率信号的放大或衰减特性。
意义
反映电路对不同频率信号的传递能力,是评价电路性 能的重要指标。
加强系统维护
定期对电路进行维护和保养,确保电路处于 良好状态,提高其抗干扰能力。
THANKS
感谢观看
02
来自外部环境的干扰,如电磁干扰、电源波动等,可能导致电
路误动作或性能下降。
传输噪声
03
信号在传输过程中受到干扰,如串扰、反射等,影响信号质量
和传输效率。
常见噪声抑制方法介绍
滤波技术
采用滤波器对电路中的噪声进行 滤除,如低通、高通、带通滤波 器等,可有效抑制特定频率范围
的噪声。
屏蔽技术
采用屏蔽罩、屏蔽线等措施,减 少外部电磁干扰对电路的影响。
应用
在通信、音频、图像处理等领域,需根据信号频率特 性选择合适的电路或系统。
滤波器类型选择依据
滤波器作用
允许某一部分频率的信号通过 ,同时抑制其他频率的信号。
通带与阻带
根据需要选择通带(允许通过 的频率范围)和阻带(被抑制 的频率范围)。
滤波器类型
如低通、高通、带通、带阻等 ,根据信号特性和应用需求选 择。
控制对象
被控制的物理量或系统,如温 度、压力、速度等。
比较元件
将测量元件输出的实际值与给 定值进行比较,产生误差信号。
执行元件
根据放大后的误差信号,驱动 控制对象改变其状态或行为。
第6章常用IO接口电路
6.2.2 常用并行I/O接口电路
1. 并行I/O接口的基本概念 2. 常用简单接口芯片 (1) 缓冲器接口芯片 ①单向缓冲器74LS244 ②双向缓冲器74LS245 (2)锁存器接口芯片 ①锁存器74LS273
②锁存器74LS374
图6-15 74LS374作为输入/输出接口
③量程:量程是指ADC所能够转换的模拟量输入电压范围。 ④绝对精度:是指在ADC输出端获得给定的数字输出时,
所需要的实际模拟量输入值与理论模拟量输入值之差值。 ⑤相对精度:是指ADC进行满刻度校准以后,任意数字输
出所对应的实际模拟输入值(中间值)与理论模拟输入值 (中间值)之差。
(3)ADC0809)ADC0809简介及应用 ①ADC0809的内部结构与引脚功能
6.2.3 常用数/模和模/数转换电路
1.数/模(D/A)转换器 (1)D/A转换原理 ( 2 )D/A转换器的性能参数 ①分辨率 ②转换精度 影响精度的原因有失调误差、增益误差、线性误
差和微分线性误差等。 ③建立时间 ④温度系数
(3)DAC0832简介及应用 ①DAC0832的内部结构与引脚功能
1.无条件传送方式 (1)无条件输入
2.查询传送方式
3.中断传送方式
4.直接存储器存取(DMA)方式
直接存储器存取(DMA,Direct Memory Access)方式, 即外设在专用的接口电路DMA控制器的控制下直接和存储 器进行数据传送的方式。采用DMA方式所传送的数据,无 须CPU干涉,而是在存储器和高速外设之间直接进行交换。
计数器式A/D转换器,双积分式A/D转换器,逐次逼近式 A/D转换器,并行A/D转换器。 (3)A/D转换器的性能参数 ①分辨率(位数):分辨率是指A/D转换器可转换成数字 量的最小模拟电压值,它标志着A/D转换器对输入电压微 小变化的响应能力。
模电课件--清华大学--华成英--6-放大电路中的反馈

反馈电流 净输入电流减小, 净输入电流减小,引入了负反馈
u N uO iR2 = R2
反馈量
在判断集成运放构成的反馈放大电路的反馈极性时,净 在判断集成运放构成的反馈放大电路的反馈极性时, 输入电压指的是集成运放两个输入端的电位差, 输入电压指的是集成运放两个输入端的电位差,净输入电 流指的是同相输入端或反相输入端的电流. 流指的是同相输入端或反相输入端的电流.
第六章 放大电路中的反馈
华成英 hchya@
第六章 放大电路中的反馈
§6.1 反馈的概念及判断 §6.2 负反馈放大电路的方框图及放大倍数的估算 §6.3 交流负反馈对放大电路性能的影响 §6.4 负反馈放大电路的稳定性 §6.5 放大电路中反馈的其它问题
华成英 hchya@
清华大学 华成英 hchya@
华成英 hchya@
§6.2 负反馈放大电路的方框图 及放大倍数的估算
一,负反馈放大电路的方框图 二,负反馈放大电路放大倍数的一般表达式 三,深度负反馈的实质 四,基于反馈系数的放大倍数的估算方法 五,基于理想运放的放大倍数的计算方法
将输出电压全 部反馈回去
华成英 hchya@
2. 直流反馈和交流反馈的判断
"看通路",即看反馈是存在于直流通路还是交流通路. 看通路" 即看反馈是存在于直流通路还是交流通路. 看通路 设以下电路中所有电容对交流信号均可视为短路. 设以下电路中所有电容对交流信号均可视为短路.
反馈组态 电压串联 电压并联 电流串联 电流并联 功能 电压控制电压 电流控制电压 电压控制电流 电流控制电流
A
Uo U
o
F
U i' I'
i
Af
第6章 控制系统的校正及综合
(s ) =
100 s + 1 s 10
A(ω c ) ≈
100
ωc
ωc
10
=1
ω c = 31.6
31.6 γ (ω c ) = 180° + − 90° − arctan = 17.5° 10
6.2 串联校正
Bode图如下图所示 图如下图所示
6.2 串联校正
γd
γd
频率特性为
jω T + 1 Wc ( jω ) = ⋅ γ d jω T + 1 1
γd
6.2 串联校正
校正电路的Bode图如下:
ω 2 = γ d ω1
ωmax = ω1 ⋅ ω2,ϕ max γ d −1 = arcsin γ d +1
6.2 串联校正
引前校正的设计步骤:
(1)根据稳态误差的要求确定系统开环放大系数,绘制 Bode图,计算出未校正系统的相位裕量和增益裕量。 (2)根据给定相位裕量,估计需要附加的相角位移。 (3)根据要求的附加相角位移确定γd。 (4)确定1/Td 和γd/Td ,使校正后中频段(穿过零分贝线) 斜率为-20dB/十倍频,并且使校正装置的最大移相角 出现在穿越频率的位置上。 (5)计算校正后频率特性的相位裕量是否满足给定要求, 如不满足须重新计算。 (6)计算校正装置参数。
6.2 串联校正
校正电路的Bode图:
6.2 串联校正
例6-3 一系统的开环传递函数为
K W (s ) = s (s + 1 )(s + 2 )
试确定滞后-引前校正装置, 试确定滞后-引前校正装置,使系统满足 下列指标: 下列指标:速度误差系数 K v = 10,相位裕 量 γ (ωc ) = 50°,增益裕量 GM ≥10dB 。
自动控制原理第六章
G(s)
K0 K p (Ti s 1) Ti s2 (Ts 1)
表明:PI控制器提高系统的型号,可消除控制系统对斜 坡输入信号的稳态误差,改善准确性。
校正前系统闭环特征方程:Ts2+s+K0=0 系统总是稳定的
校正后系统闭环特征方程:TiTs3 Ti s2 K p K0Ti s K p K0 0
调节时间 谐振峰值
ts
3.5
n
Mr
2
1 ,
1 2
0.707
谐振频率 r n 1 2 2 , 0.707
带宽频率 b n 1 2 2 2 4 2 4 4 截止频率 c n 1 4 4 2 2
相角裕度
arctan
低频段:
开环增益充分大, 满足闭环系统的 稳态性能的要求。
中频段:
中频段幅频特性斜 率为 -20dB/dec, 而且有足够的频带 宽度,保证适当的 相角裕度。
高频段:
高频段增益尽 快减小,尽可 能地削弱噪声 的影响。
常用的校正装置设计方法 -均仅适用最小相位系统
1.分析法(试探法)
特点:直观,物理上易于实 现,但要求设计者有一定的 设计经验,设计过程带有试 探性,目前工程上多采用的 方法。
列劳思表:
s3 TiT
K p K0Ti
s2 Ti
K pK0
s1 K p K0 (Ti T )
s0 K p K0
若想使系统稳定,需要Ti>T。如果 Ti 太小,可能造成系 统的不稳定。
5.比例-积分-微分(PID)控制规律
R( s )
E(s)
C(s)
K
p (1
第章放大电路中的反馈反馈概念与判断

那么,什么是电路中的反馈 ?
(1)电路中的反馈 (FeedBack)
电路中,将输出量(电压/电流)的部分或者全部 通过电路形式作用到输入回路,通过影响(增大/减 小)输入量(电压或电流)来影响输出量的措施。
输入量
净输入量
输出量
求和电路 反馈量
取自输出量 不影响输出
6.2 负反馈放大电路的组态
负反馈放大电路的作用:——稳定输出
uI
+
u
+A
uo
D-
RL
RL变化
uo
uN
uD=uI-uf
uo
6.2.1 负反馈放大电路分析要点
负反馈放大电路概述:
1.交流负反馈提高放大电路输入/输出稳定比例关系。 (抑制外界因素干扰) 2.反馈是对输出的取样。 3.负反馈本质是输入与反馈量相减,通过调整净输入 来调整输出。 负反馈的分类方法: 输出看:反馈量取自输出电压还是电流 输入看:电压叠加(串联)还是电流叠加(并联)
io uI
电压并联负反馈:
(稳定电压/输入恒流源) Auif
uo iI
电流并联负反馈: (稳定电流/输入恒流源)
Aiif
io iI
6.2.3 反馈组态的判断
(1)设计角度:根据稳定目的需求选取 (2)分析角度:如何分析设计者目的?
一.电压负反馈与电流负反馈的判断
判据:输出短路法——令输出电压uo为零(负载RL短路)
如:Re电流反馈稳定工作点电路: 温度升高,Ic有增大趋势,通过Re反馈,使得:
输入量:Ube 减小。
输出变化量 ΔIc /|ΔIc| 减小(直流/交流)。 说明引入:负反馈。
高频电子线路第章反馈控制电路
3 、 自 动 相 位 控 制 (Automatic Phase Control , 简 称 APC),又称为锁相环路(Phase Lock Loop,简称PLL),它 用于锁定相位,能够实现许多功能,是应用最广的一种反 馈控制电路。
反馈网络的作用:是在输出信号uo (t)中提取所需要进 行比较的分量,送到比较器与参考信号进行比较。
10.1 自动增益控制电路
一、自动增益控制的意义 在通信、导航、遥测遥感等无线电系统中,接收机接收到
的信号可能有强有弱,通过AGC,使接收机的增益随信号 强弱自动改变,达到信号幅度均衡的目的。AGC的基本结 构如图10-2。
概述
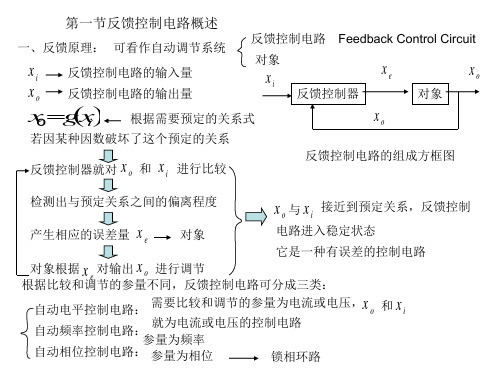
一、反馈控制的概念和分类 反馈控制是现代系统工程中的一种重要技术手段。
在系统受到扰动的情况下,通过反馈控制作用,可使系 统的某个参数达到所需的精度,或按照一定的规律变化。 电子线路中也常常应用反馈控制技术。根据控制对象参 量的不同,反馈控制电路可以分为以下三类:
1、自动增益控制 (Automatic Gain Control,简称AGC), 它主要用于接收机中,控制接收机的增益,以维持整机输 出恒定,使之几乎不随外来信号的强弱变化。
三、自动增益控制电路
根据输入信号的类型、特点以及对控制的要求, AGC电路主要有以下几种类型。
1.简单AGC电路
在简单AGC电路里,参考电平Ur=0。这样,只要 输入信号振幅Ui增加,AGC的作用就会使增益Kv减小, 从而使输出信号振幅Uo减小。图10-4为简单AGC的特性 曲线。
特点: 一有输入信号,
改变“延迟电压” 可改变门限的大小
-
至信号 检波
+
模电6反馈.
的关系不变,电流反馈。
电路引入的是电流串联负反馈
38
讨论三
R1
uI
T1
I
+VCC R3
T2 R2
R4
T3
+
uF -
R5
电压串联负反馈
+
u- o
-VCC
39
分立元件放大电路中的输出电流
在分立元件电流负反馈放大电路中,反 馈量常取自于输出级晶体管的集电极电 流或发射极电流,而不是负载上的电流; 此时称输出级晶体管的集电极电流或发 射极电流为输出电流,反馈的结果将稳 定该电流。
2)判断交、直流反馈: 看反馈网络的构成 3)判断正、负反馈: 瞬时极性法 4) 判断串、并联反馈 看反馈电路与输入端的连接形式
5) 判断电压、电流反馈 看反馈电路与输出端的连接形式
36
讨论一
RF1
RF2
ui
R1 uD
- +A1
uo1
R1
- +A2
uo
RL
uf R2
RF3
RF1 、 RF2 : 本级交直流串联电压负反馈;
+ -
A
iO RL
+ u- O
+
R1 uF -
因为uD= uI-uF ,所以它们均引入了串联反馈。
+ iI iD - A
iF R
uO
RL
iI
iD
+ -
A
+ iO u-O
R1 iF R2
因为iD= iI-iF ,所以它们均引入了并联反馈。 35
归纳
反馈类型的判断
1)找出反馈网络 将输入、输出回路联系起来的电路。
第六章 系统校正

常用的有源校正网络见书。
三、串联校正 1 频率响应法校正设计
用频率法对系统进行校正的基本思路是通过校正装置 的引入改变开环频率特性中频部分的形状,即使校正后系 统的开环频率特性具有如下的特点:低频段增益满足稳态 精度的要求;中频段对数幅频特性渐近线的斜率为-20dB /dec,并具有一定宽度的频带,使系统具有满意的动态性 能;高频段幅值能迅速衰减,以抑制高频噪声的影响。
3)积分(Ⅰ)控制规律 具有积分控制规律的控制器,称为Ⅰ控制器。Ⅰ控制器的输出信
号m(t)与其输入信号e(t)的积分成正比,即
其中Ki为可调比例系数。 在串联校正时,采用Ⅰ控制器可以提高系 统的型别(无差度),有利于系统稳态性能的提高,但积分控制使 系统增加了一个位于原点的开环极点,使信号产生90°的相角滞后, 对系统不利。因此,在控制系统的校正设计中,通常不宜采用单一 的Ⅰ控制器。
控制系统方框图
R(s)
+_
K s(s 1)
C(s)
若要求系统在单位斜坡输入信号作用时,稳态误
差ess≤0.1,开环系统剪切频率c≥4.4 (弧度/秒),相 角裕度g ≥45°,幅值裕度h(dB) ≥10.试选择串联无
源超前网络的参数。
为首Ⅰ先型调系整统开,所环以增有益Ke.s本s 例K1未校0正.1系统
待校正系统相角迅速减小,使已校正系统的相角裕度 改善不大,很难得到足够的相角超前量。在一般情况 下,产生这种相角迅速减小的原因是,在待校正系统 截止频率的附近,或有两个交接频率彼此靠近的惯性
环节;或有两个交接频率彼此相等的惯性环节;或有 一个振荡环节。 在上述情况下,系统可采用其它方法进行校正。
模拟电子技术电子教案:第六章--放大电路的反馈
第六章 放大电路的反应〖主要内容〗1、根本概念反应、正反应和负反应、电压反应和电流反应、并联反应和串联反应等根本概念;2、反应类型判断:有无反应?是直流反应、还是交流反应?是正反应、还是负反应?3、交流负反应的四种组态及判断方法;4、交流负反应放大电路的一般表达式;5、放大电路中引入不同组态的负反应后,对电路性能的影响;6、深度负反应的概念,在深度负反应条件下,放大倍数的估算;〖本章学时分配〗本章分为3讲,每讲2学时。
第十九讲 反应的根本概念和判断方法及负反应放大电路的方框图一、 主要内容1、反应的根本概念 1〕什么是反应反应:将放大器输出信号的一局部或全部经反应网络送回输入端。
反应的示意图见以下图所示。
反应信号的传输是反向传输。
开环:放大电路无反应,信号的传输只能正向从输入端到输出端。
闭环:放大电路有反应,将输出信号送回到放大电路的输入回路,与原输入信号相加或相减后再作用到放大电路的输入端。
图示中i X 是输入信号,f X是反应信号,i X '称为净输入信号。
所以有 f i i X X X -='2) 负反应和正反应负反应:参加反应后,净输入信号iX ' <iX ,输出幅度下降。
应用:负反应能稳定与反应量成正比的输出量,因而在控制系统中稳压、稳流。
正反应:参加反应后,净输入信号iX ' >iX ,输出幅度增加。
应用:正反应提高了增益,常用于波形发生器。
3) 交流反应和直流反应直流反应:反应信号只有直流成分;交流反应:反应信号只有交流成分;交直流反应:反应信号既有交流成分又有直流成分。
直流负反应作用:稳定静态工作点;交流负反应作用:从不同方面改善动态技术指标,对Au、Ri、Ro有影响。
2、反应的判断1〕有无反应的判断〔1〕是否存在除前向放大通路外,另有输出至输入的通路——即反应通路;〔2〕反应至输入端不能接地,否那么不是反应。
2〕正、负反应极性的判断之一—瞬时极性法〔1〕在输入端,先假定输入信号的瞬时极性;可用“+〞、“-〞或“↑〞、“↓〞表示;〔2〕根据放大电路各级的组态,决定输出量与反应量的瞬时极性;〔3〕最后观察引回到输入端反应信号的瞬时极性,假设使净输入信号增强,为正反应,否那么为负反应。
第六章反馈控制电路
稳态幅差或剩余幅差 Vo mVo mkrv
可控增益越大, A 1Ar Vo m
• 2、应用
(1).自动电平控制电路Automatic Gain Control,AGC
Vom vr ve 0
v s V im k a v tcw o c tsAve
A0 最大
Vim Vom
高频 放大器
• (2)调频负反馈解调电路
调频输入
Wi
We 混频器
中频 放大器
Wo
压控 振荡器
限幅 鉴频器
低通
解调电压输出
滤波器
调频负反馈解调电路
w iw c w mcc o ts w ow L w mc L o ts
w e (w c w L ) ( w m cw m )c L o t 仍s 为不失真的调频波
Vom min AmV ax im min
Vommax/Vommin
能够在A的变化范围, 满足环路的输出控制 在所要求范围内。
Vom ma x AmV inim max AmaxVimmax/Vimmin
A的控制倍数
A max A min
ve A Vom ve/
接收的灵敏度电压 通常取
Amin Vommax/Vommin ( V om m V a o x m m ) in v e m v a e m x in V om m iv n r V im m in v e m i0 n
o t
wo wi
.
VO
(b)
第二节、锁相环路性能分析
• 一、基本环路方程 • 1、鉴相器 锁相环路中鉴相器的输入信号:输入信号电压和VCO电压Vo
鉴相器作用:检测出两信号的相位差,并产生相应的输出电压Vd(t)
第六章 放大电路中的反馈[华成英、童诗白版]
![第六章 放大电路中的反馈[华成英、童诗白版]](https://img.taocdn.com/s3/m/cc26a02658fb770bf78a556f.png)
对于串联负反馈: U i U f 并联负反馈: I i I f 结论:根据负反馈组态,选择适当的公式;再根据 放大电路的实际情况,列出关系式后,直接估算闭环电 压放大倍数。
6.4.2 深度负反馈放大电路放大倍数的分析
+UCC + - + ∞ A + Rf + Rb C1 + V1 - + Uf - Rf Re1 Re2 Ce2 - (b) V2 RL Rc1 Rc2 C2 +
③若 1 AF 0则Af 无输入有输出 ----自激振荡
④若
1 AF
1 ----深度负反馈 1 则A f F
引入负反馈,则
中频时
A Af 1 AF
AF 0 即 X f 与X i 同相
6.4 深度负反馈放大电路放大倍数的分析
6.4.1 深度负反馈的实质
+VCC
ube
T1
T2
+
+ uf -
uo CE –
交流负反馈
Rf
电压串联负反馈
例2:判断Rf是否负反馈,若是,判断反馈的组 态。
RC +VCC
并联反馈 +
ui C1 i
if
Rf
-
C2
电压反馈
ib
uo
电压并联负反馈,交直流反馈
例3:判断Rf是否负反馈,若是,判断反馈的组态。
+VCC
并联反馈 i +
A Af 1 AF
A Af 1 AF 1 AFFra bibliotek反馈深度
①若 1 AF 1则 | Af || A | 放大倍数减小 ----负反馈
②若 1 AF 1 则 | A || A | 放大倍数增加 ----正反馈 f
第6章电力拖动自动控制系统运动控制系统第5版ppt课件

差功率、减小输出功率来换取转速的降低。
增加的转差功率全部消耗在转子电阻上,
这就是转差功率消耗型的由来。
6.2.2 异步电动机调压调速 的机械特性
增加转子电阻值, 临界转差率加大, 可以扩大恒转矩负 载下的调速范围, 这种高转子电阻电 动机又称作交流力 矩电动机。
缺点是机械特性
较软。
图6-6 高转子电阻电动机(交流力矩 电动机)在不同电压下的机械特性
6.2.3 闭环控制的调压调速系统
要求带恒转 矩负载的调 压系统具有 较大的调速 范围时,往 往须采用带 转速反馈的 闭环控制系 统。
图6-7 带转速负反馈闭环控 制的交流调压调速系统
6.2.3 闭环控制的调压调速系统
当系统带负载稳定时,如果负载增大或减 小,引起转速下降或上升,反馈控制作用 会自动调整定子电压,使闭环系统工作在 新的稳定工作点。
由于受电动机绝缘和磁路饱和的限制, 定子电压只能降低,不能升高,故又 称作降压调速。
异步电动机调压调速
调压调速的基本特征:电动机同步转速保 持额定值不变
n1
n1N
60 f1N np
气隙磁通
Φm
Us 4.44 f1NskNS
随定子电压的降低而减小,属于弱磁调速。
6.2.1 异步电动机调压调速 主电路
12
Lls
L'lr
2
异步电动机的机械特性
异步电动机传递的电磁功率
Pm
3I
'2 r
Rr'
s
机械同步角速度
m1
1
np
异步电动机的机械特性
异步电动机的电磁转矩(机械特性方程式 )
Te
Pm
m1
3n p
自动控制原理—第六章

jT 1 jT 1
相角位移:()=arctanT-arctan(T)
伯德图 滞后校正装置伯德图的 特点: 1)转折频率与之间渐 近 线 斜 率 为 -20dB/dec , 起积分作用; 2) ()在整个频率范 围 内 都 <0 , 具 有 相 位 滞后作用; 3) ()有滞后最大值 m; 4) 此装置对输入信号 有低通滤波作用。
图中的m为校正装置出现最大滞后相角的频率,它位于两个 转折频率
1 T
1 和T
的几何中点,m为最大滞后相角,它们分别为
1 T
m
1 2
m arct an
为了避免对系统的相位裕量产生不良影响,应尽量使最大滞后 相角对应的频率远离校正后系统新的幅值穿越频率 ’ c ,一般 ’c远大于第二个转折频率2,即有 ' 1 ' 2 c ~ c
比例—积分调节器主要用于在基本保证闭环系统 稳定性的前提下改善系统的稳态性能。
四、比例、积分、微分控制 (PID控制器)
d 1.时域方程: m(t ) K p e(t ) 0 e(t )dt K p d dt e(t ) Ti
t
Kp
2.传递函数:
1 Gc ( s) K p 1 d s Ts i
第6章——控制系统的校正
6.1 控制系统校正的基本概念 6.2 控制系统的基本控制规律 6.3 超前校正装置及其参数的确定 6.4 滞后校正装置及其参数的确定 6.5 滞后-超前校正装置 6.6 期望对数频率特性设计法
6.1 控制系统校正的基本概念
一、校正的一般概念
系统校正方法有时域法、根轨迹法、频域法 (也称频率法)。系统校正的实质可以认为是在 系统中引入新的环节,改变系统的传递函数(时 域法),改变系统的零极点分布(根轨迹法), 改变系统的开环波德图形状(频域法),使系统 具有满意的性能指标。这三种方法互为补充,且 以频率法应用较为普遍。
第六章反馈控制电路
2. 自动频率控制电路 (Automatic Frequency Control— AFC)。
3. 自动相位控制电路 (Automatic Phase Control— APC)。
第6章 反馈控制电路
主要内容:
重点及要求
1. 反馈控制电路的概念 重点:锁相环路的性能分析。 2. 自动电平控制电路(ALC) 要求:熟悉自动电平控
制电路、自动频率控制
3. 自动频率控制电路(AFC) 电路、自动相位控制电
4. 自动相位控制电路(APC) 路的工作原理;掌握锁
相环路性能分析的基本
5. 锁相环性能分析及应用 方法;了解锁相环路的
6.1.2 自动频率控制电路(AFC)
自动频率控制(Automatic Frequency Control)电路பைடு நூலகம்是 无线电设备中又一常用的反馈控制电路,广泛应用于无 线电发射设备和接收设备,其基本功能是自动调整无线 电设备中振荡器的振荡频率。
一、工作原理
ui(t)
i
混频器
ue(t)
eo
差频 放大器
U im max
Amax
U im min
Am in
U om max U om min
增益控制倍数
变化压缩倍数
已调波功率放大器
包络 检波器
u-
比较 放大器
u+
包络 检波器
已调波输入
放大 和滤波
已调波 已调波线性 输出
功率放大器
6-1-1 自动电平控制电路(ALC)
Au(dB)
精品文档-数字电路与系统设计(第二版)(邓元庆)-第6章

第6章
从表6- 1中可以看出,为了得到应该输出的电压,只要保
证输入D2D1D0=100时输出电压UO = 0即可。为此,在求和放大器的 输入端增加了偏移电压UB和偏移电阻RB。根据图6- 8所示电路, 为 了使输入D2D1D0=100时输出电压UO = 0,电流IΣ和偏移电流IB之和 必须为零,则有:
n1
Di 2i
i0
(6-9) (6-10)
第6章 3. 倒T型电阻网络DAC电路
图6- 7所示为4位倒T型电阻网络DAC电路的原理图, 它同样 由R- 2R电阻网络、单刀双掷模拟开关(S0、S1、S2和S3)、 基准电 压UREF和求和放大器四部分构成。它与T型电阻网络DAC电路的区别在 于:
① 电阻网络呈倒T型分布。
第6章
4. 双极性DAC电路
偏移二进制码是在带符号二进制码的基础上加上一个偏移 量得到的。n位二进制数D 的偏移二进制码为
DB = DC+2n
(6- 14)
式中2n 就是偏移量,DC是n位二进制数D 的补码。例如一个正的3 位二进制数D = (+110)2,其补码为(0110)2,则对应的偏移二进制 码为:
U LSB
| U REF 2n
|
(6-16)
第6章
满量程输出电压UFSR定义为:输入数字量的所有位均为1 时, DAC输出模拟电压的幅度。有时也把UFSR称为最大输出电压 Umax。 对于n位DAC电路,满量程输出电压UFSR为
U FSR
2n 1 2n
| U REF
|
(6-17)
对于电流输出的DAC,则有ILSB和IFSR两个概念,其含义与 ULSB和UFSR相对应。有时也将ULSB和ILSB简称为LSB,将UFSR和IFSR简称 为FSR(Full Scale Range)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上一页 下一页 返回
6. 4自动相位控制环路
6 .4.5锁相环路的应用
1.锁相调频与解调 用锁相环环路组成的调频电路.可以获得中心频率稳定度很高的
路由失锁进入锁定的过程称为捕捉过程。
上一页 下一页 返回
6. 4自动相位控制环路
2.环路的跟踪 环路原先是锁定的.当输入信号频率发生变化时.环路通过自身调
节来维持锁定的过程称为跟踪过程。处于锁定状态的环路是一种动态 平衡状态。当输入信号频率改变时.破坏了环路动态平衡.造成鉴相器 输出的误差电压发生变化。经过滤波器加到压控振荡器上.再次达到 动态平衡.这就是锁相环的跟踪特性。
上一页 下一页 返回
6. 4自动相位控制环路
2.频率合成 频率合成器是将一个或几个高精度和高稳定度的标准参考频率.
经过混频、倍频与分频等对它进行加、减、乘、除的四则运算.最终 产生大量的具有高精确度的频率源。现代电子技术中常’常要求高精 确度和高稳定度的频率.一般都用晶体振荡器。但是晶体振荡器的频 率是单一的.只能在极小的范围内微调。然而.许多无线电设备都要求 在一个很宽的频率范围内提供大量稳定的频率点。例如.短波SSB通信 机要求在2 ~30MHz范围内.提供以100Hz为间隔的28万个频率点.每个 频率点都要求具有与晶体振荡器相同的频率准确度和稳定度.这就需 要采用频率合成技术。
返回
自动相位控制电路通常称为锁相环路。利用锁相环路.可以实现 许多功能。锁相环路的被控量是相位.被控对象是压控振荡器(VC().在 反馈控制器中对振荡相位进行比较.利用输出误差量对被控对象的输 出相位进行调整。图6-4所示是自动相位控制电路的组成方框图。
上一页 返回
6. 2自动增益控制电路
6. 2. 1自动增益控制电路的组成和工作原理
返回
图6-2自功振幅控制电路组成方框图
返回
图6-3自功频率控制电路的组成方框图
返回
图6-4自动相位控制电路的组成方框图
返回
图6-5自动增益控制电路的组成
返回
图6-6具有AGC电路的调幅接收机框图
返回
图6-7自动频率控制电路的框图
返回
图6-8具有AFC电路的调幅收音机的 组成框图
返回
图6一9锁相环路框图
下一页 返回
6.1概述
6.1.2自动频率控制原理
自动频率控制电路主要用于电子设备中.以保证振荡器的振荡频 率稳定。被控量是频率.被控对象是压控振荡器(VCO)。而在反馈控制 中.必须对振荡频率进行比较.利用输出误差量对被控对象的输出频率 进行调整。
图6-3所示是自动频率控制电路的组成方框图.
6. 1 .3自动相位控制原理
返回
图6-13压控振荡器特性曲线
返回
图6一15锁相环路的基本模型
返回
图6-16 VE567内部方框图
返回
图6一17 L564内部框图
返回
图6-18 CC4046内部框图
返回
图6-19锁相调频的组成框图
返回
图6-20锁相鉴频电路
返回
图6-2 3锁相环频率合成器的基本框图
返回
图6-24数字频率合成器的基本框图
上一页 下一页 返回
6. 4自动相位控制环路
6.4.4集成锁相环路
集成锁相环按照其内部电路结构可以分为模拟锁相环和数字锁 相环两大类。按照其用途可以分为通用型和专用型两种。通用型是一 种具有各种用途的锁相环.其内部主要由PD和VCO两部分组成.有时还 附加放大器和其他辅助电路.也有单独的集成PD和集成VCO连接成满 足某种需要的锁相环路。专用型是一种专为某种功能设计的锁相环. 例如.用于彩色电视接收机中的色差信号解调电路、调频接收机中的 调频立体声解码电路等。下面介绍几种常用的集成锁相环路。 1. NE567
上一页 下一页 返回
6. 4自动相位控制环路
6.4.3锁相环路的窄带特性
输入信号中不可避免地混杂着大量的噪声和干扰。当环路处于锁 定的状态时.处于输入信号频率、附近的干扰信号将以差拍形式在鉴 相器输出端产生差拍电压。差拍频率就是干预频率与压控振荡器的锁 定输出频率之差。其中.差频较高的大部分差拍干扰信号被环路滤波 器抑制.施于压控振荡器上的干扰控制电压很小.所以压控振荡器的输 出信号可以看成是经过环路提纯了的输出信号。在这里.环路起了一 个滤除噪声的窄带滤波器的作用。
第6章反馈控制电路
6.1概述 6.2自动增益控制电路 6.3自动频率控制电路 6.4自动相位控制环路 6.5反馈控制电路的制作、调试和检测
6.1概述
6 .1.1自动振幅控制原理
自动振幅控制电路通常称为自动增益控制电路。它主要用于接 收机中.使整机在输入振幅变化时保持输出电压振幅不变。自动振幅 控制电路的被控量是电压振幅.在反馈控制器中必须进行振幅比较.利 用误差量去对输出振幅进行调整。图6-2所示是自动振幅控制电路组 成方框图.可控增益放大器是环路的被控对象.它的输入量ui(不是控制 环路的输入量uR)与输出量uo的关系是
任何一种振荡器.如LC振荡器、R C振荡器和多谐振荡器均可构成压 控振荡器。压控振荡器的特性曲线如图6-13所示。 4.锁相环路模型和基本方程式 将上面得到的3个基本环路部件的模型图连接起来.就构成了图6-15 。
6.4.2锁相环路的捕捉与跟踪
1.环路的捕捉 若环路初始状态原光是失锁的.通过自身的调节进入锁定.这种环
调频信号。图6-19为锁相调频电路的组成框图。 用锁相环路也可以实现调频波的解调.其组成框图如图6-20所示 图6-2 0中由于输入高频信号是一个调频波.其频率在变化.而压控
振荡器的振荡频率与其跟踪变化产生一个变化的相位误差电压.通过 低通滤波器除其高频成分.因此通过低通滤波器的输出就可以产生一 个随调频信号变化的解调信号.即实现鉴频功能。
上一页 返回
6. 5反馈控制电路的制作、调试和检测
1.调频电路的调试和检侧 1)锁相环的自由振荡频率的测量 2)观察变容二极管静态工作点对压控振荡器自由振荡器的影响 3)观察锁定现象 4)测试同步带和捕捉带 2.鉴频电路的调试和检测 1)鉴频电路的自由振荡频率的测量 2)观察锁定现象并测试同步带与捕捉带 3.观察系统的调频和鉴频的情况
自动增益控制电路是一种在输入信号幅值变化很大的情况下.通 过调节可控增益放大器的增益.使输出信号幅值基本恒定或在较小范 围内变化的一种电路.其组成框图如图6-5所示。
6.2.2自动增益控制电路的应用
图6-6所示是具有简单的AGC电路的超外差式收音机的框图。天 线收到的信号经过放大、变频再放大后.进行检波.取出音频信号。此 音频信号的大小将随着输入信号强弱的变化而变化。
上一页 下一页 返回
6. 4自动相位控制环路
频率合成的主要方法有3种:直接频率合成法、锁相环频率合成法 以及数字频率合成法。其中直接频率合成法是利用混频器、倍频器、 分频器和带通滤波器来完成对频率的四则运算.该种方法已经比较少 用.后两种都有广泛的应用。图6-2 3和图6-2 4分别是锁相环频率合成 器和数字频率合成器的基本框图。
返回
6. 4自动相位控制环路
6. 4. 1锁相环路基本工作原理
基本锁相环由鉴相器(PD)、环路滤波器(LF)、压控振荡器(VCO) 3部分组成.如图6-9所示。 1.鉴相器(PD)
鉴相器是一个相位比较器.对输入信号ui(t)和输出信号uo(பைடு நூலகம்)的相位 进行比较.产生输出电压uD(t),这个电压的大小直接反映两个信号相位 差的大小.即鉴相器的作用是完成相位差一电压的变换。 2.环路滤波器(LF)
环路滤波器是低通滤波器.用来滤除误差电压。 uD(t)中的高频分 量和噪声。此外.由于环路滤波器的传递函数对环路性能有相当大的 影响.因而还可以调整环路滤波器的参数来获得环路所需要的性能。
下一页 返回
6. 4自动相位控制环路
3.压控振荡器(VCO) 压控振荡器是指振荡角频率受到控制电压uC(t)控制的振荡器。
返回
6. 3自动频率控制电路
自动频率控制电路也是一种反馈控制系统.其作用是自动调整振 荡器的频率。自动频率控制电路的组成框图如图6-7所示.主要由压控 振荡器(VCO) ,差频放大器、混频器、限幅鉴频器及放大器组成。
图6-8是采用AFC的超外差式调幅收音机的组成框图。它将本机 振荡器变为压控振荡器.中频放大器输出的部分中频信号.送到限幅鉴 频器进行鉴频.将偏离于额定中频的频率误差变换成电压。该电压通 过窄带低通滤波器和放大器后作用到压控振荡器上。压控振荡器的振 荡频率发生变化.使偏离于中频的频率误差减小。在自动频率控制电 路的作用下.接收机的输入调幅信号的载波频率和VCO振荡频率之差 接近于额定中频。这样就可以使得中频放大器的带宽可以减小.有利 于提高接收机的灵敏度和选择性。
NE567是一个高稳定度的低频单片集成锁相环路。图6-16示出了 NE567的内部方框图。
上一页 下一页 返回
6. 4自动相位控制环路
2. L564(NE564) L564是58系列中工作频率高达50MHz的一块超高频通用单片集
成锁相环路.其组成框图如图6-17所示。电路由输入限幅器、鉴相器、 压控振荡器、放大器、直流恢复电路和施密特触发器6大部分电路组 成。 3. CC4046