基于模糊PLC的施肥灌溉控制系统的研究ppt
基于PLC控制技术的农业自动灌溉系统设计
基于PLC控制技术的农业自动灌溉系统设计摘要:水是一切生命过程中不可替代的基本要素,水资源是国民经济和社会发展的重要基础资源。
我国是世界上13个贫水国之一,人均水资源占有量2300立方米,只有世界人均水平的1/4,居世界第109位。
而且时空分布很不均匀,南多北少,东多西少;夏秋多,冬春少;占国土面积50%以上的华北、西北、东北地区的水资源量仅占全国总量的20%左右。
近年来,随着人口增加、经济发展和城市化水平的提高,水资源供需矛盾日益尖锐,农业干旱缺水和水资源短缺已成为我国经济和社会发展的重要制约因素,而且加剧了生态环境的恶化。
按现状用水量统计,全国中等干旱年缺水358亿立方米,其中农业灌溉缺水300亿立方米。
20世纪90年代以来,我国农业年均受旱面积达2000万公顷以上,全国660多个城市中有一半以上发生水危机,北方河流断流的问题日益突出,缺水已从北方蔓延到南方的许多地区。
由于地表水资源不足导致地下水超采,全国区域性地下水降落漏斗面积已达8.2万平方公里。
发达国家的农业用水比重一般为总用水量的50%左右。
目前,我国农业用水比重已从1980年的88%下降到目前的70%左右,今后还会继续下降,农业干旱缺水的局面不可逆转。
北方地区水资源开发利用程度已经很高,开源的潜力不大。
南方还有一些开发潜力,但主要集中在西南地区。
我国农业灌溉用水量大,灌溉效率低下和用水浪费的问题普遍存在。
目前全国灌溉水利用率约为43%,单方水粮食生产率只有10公斤左右,大大低于发达国家灌溉水利用率70-80%、单方水粮食生产率2.0公斤以上的水平。
通过采用现代节水灌溉技术改造传统灌溉农业,实现适时适量的“精细灌溉”,具有重要的现实意义和深远的历史意义。
在灌溉系统合理地推广自动化控制,不仅可以提高资源利用率,缓解水资源日趋紧张的矛盾,还可以增加农作物的产量,降低农产品的成本。
本次设计是采用PLC控制多路不同的土壤湿度,浇灌的开启和停止完全由土壤的湿度信号控制,能使土壤的湿度值保持在作物生长所需要的最佳范围之内。
基于PLC控制技术的农业自动灌溉系统设计

基于PLC控制技术旳农业自动浇灌系统设计摘要:水是一切生命过程中不可替代旳基本要素,水资源是国民经济和社会发展旳重要基础资源。
我国是世界上13个贫水国之一,人均水资源占有量2300立方米,只有世界人均水平旳1/4,居世界第109位。
并且时空分布很不均匀,南多北少,东多西少;夏秋多,冬春少;占国土面积50%以上旳华北、西北、东北地区旳水资源量仅占全国总量旳20%左右。
近年来,伴随人口增长、经济发展和都市化水平旳提高,水资源供需矛盾日益锋利,农业干旱缺水和水资源短缺已成为我国经济和社会发展旳重要制约原因,并且加剧了生态环境旳恶化。
按现实状况用水量记录,全国中等干旱年缺水358亿立方米,其中农业浇灌缺水300亿立方米。
20世纪90年代以来,我国农业年均受旱面积达2023万公顷以上,全国660多种都市中有二分之一以上发生水危机,北方河流断流旳问题日益突出,缺水已从北方蔓延到南方旳许多地区。
由于地表水资源局限性导致地下水超采,全国区域性地下水降落漏斗面积已达8.2万平方公里。
发达国家旳农业用水比重一般为总用水量旳50%左右。
目前,我国农业用水比重已从1980年旳88%下降到目前旳70%左右,此后还会继续下降,农业干旱缺水旳局面不可逆转。
北方地区水资源开发运用程度已经很高,开源旳潜力不大。
南方尚有某些开发潜力,但重要集中在西南地区。
我国农业浇灌用水量大,浇灌效率低下和用水挥霍旳问题普遍存在。
目前全国浇灌水运用率约为43%,单方水粮食生产率只有10公斤左右,大大低于发达国家浇灌水运用率70-80%、单方水粮食生产率2.0公斤以上旳水平。
通过采用现代节水浇灌技术改造老式浇灌农业,实现适时适量旳“精细浇灌”,具有重要旳现实意义和深远旳历史意义。
在浇灌系统合理地推广自动化控制,不仅可以提高资源运用率,缓和水资源日趋紧张旳矛盾,还可以增长农作物旳产量,减少农产品旳成本。
本次设计是采用PLC控制多路不一样旳土壤湿度,浇灌旳启动和停止完全由土壤旳湿度信号控制,能使土壤旳湿度值保持在作物生长所需要旳最佳范围之内。
基于PLC的自动浇灌系统设计

基于PLC的自动浇灌系统设计自动浇灌系统是一种应用于植物生长环境的技术,通过对植物的浇水、施肥、控制温湿度等方面进行自动化管理,以提高生长效率和减少劳动成本。
基于PLC(可编程逻辑控制器)的自动浇灌系统可以实现对浇灌系统的精确控制和监测,下面将对该系统的设计进行详细介绍。
首先,系统硬件部分主要包括传感器、执行器和PLC。
传感器起到监测植物生长环境的作用,可以监测土壤湿度、光照强度、温度等参数。
执行器用于控制浇水、排水以及窗帘的开关等操作。
PLC是整个系统的控制中心,负责接收传感器的数据,并根据预设的程序进行逻辑控制,向执行器发出控制信号。
其次,系统软件部分主要包括浇水控制程序和用户界面。
浇水控制程序是PLC中的核心程序,通过编程实现对传感器数据的处理以及对执行器的控制。
在该程序中,可以根据不同的植物需求设定不同的浇水策略,如定时浇水、根据土壤湿度自动浇水等。
用户界面是通过人机界面实现与系统的交互,用户可以通过界面设定浇水策略、查看植物生长状态等。
系统工作流程如下:首先,传感器监测植物生长环境的参数,如土壤湿度、光照强度等,并将数据传输给PLC。
PLC根据预设的浇水策略判断是否需要浇水,如果需要浇水,则向执行器发送信号,执行器开始浇水。
浇水过程中,传感器继续监测土壤湿度,并将数据反馈给PLC。
当土壤湿度达到预设值时,PLC停止浇水,并记录浇水时长和浇水量等数据。
用户可以通过用户界面查看这些数据,以及设定浇水策略。
基于PLC的自动浇灌系统的设计有以下优点:首先,PLC具有可编程性和可靠性高的特点,可以实现复杂的浇水控制逻辑,确保植物得到精确控制的浇水。
其次,传感器的使用可以实时监测植物的生长环境,并根据不同的需求调整浇水策略,达到最佳浇水效果。
最后,用户界面的设计使得用户可以方便地操作系统,了解植物的生长状态,实现对浇水系统的管理和控制。
总结起来,基于PLC的自动浇灌系统设计是一种高效、可靠的植物生长环境管理技术,可以提高生长效率和降低劳动成本。
基于PLC的水肥一体化灌溉控制器设计

基于PLC的水肥一体化灌溉控制器设计一、介绍水肥一体化灌溉系统是将灌溉与施肥功能集成在一起的系统,并通过自动化控制器来实现对水肥配比、灌溉时间和灌溉量的精确控制。
PLC (可编程逻辑控制器)是一种专门用于工业自动化领域的控制设备,具有功能强大、可靠性高的特点,非常适合用于控制水肥一体化灌溉系统。
二、设计目标本设计旨在实现对水肥一体化灌溉系统的精确控制,使灌溉过程更加高效、节水、节能。
三、设计内容1.传感器与执行器选择为了实现对水肥一体化灌溉系统的精确控制,需要选择适合的传感器和执行器。
传感器方面,可以选择土壤湿度传感器、土壤温度传感器、土壤盐度传感器等,用于实时监测土壤的湿度、温度和盐度等参数。
执行器方面,可以选择电磁阀门、水泵、肥料喷洒器等,用于控制灌溉水的供应和肥料的喷洒。
2.系统结构设计水肥一体化灌溉系统的结构包括传感器模块、执行器模块和控制器模块。
传感器模块负责实时采集土壤的湿度、温度和盐度等参数,并将数据传输给控制器模块。
执行器模块负责根据控制器模块的指令,控制电磁阀门、水泵和肥料喷洒器等设备的开关状态,实现对灌溉水和肥料的供应。
控制器模块是整个系统的核心部分,它负责接收传感器模块的数据,根据事先设置好的算法进行处理,并输出控制指令给执行器模块,实现对灌溉水肥一体化系统的精确控制。
3.控制算法设计控制算法是水肥一体化灌溉系统中最关键的部分,它决定了系统对灌溉水和肥料的控制策略。
一种常用的控制算法是PID(比例、积分、微分)控制算法,通过不断调整控制器的输出,使得系统的输人与输出之间达到平衡,从而实现对水肥一体化灌溉系统的精确控制。
4.界面设计为了方便用户对水肥一体化灌溉系统进行设置和监控,需要设计一个用户界面。
用户界面可以使用触摸屏或者按键等进行操作,提供设置灌溉时间、水肥比例等参数的功能,并能够实时显示当前土壤湿度、温度和盐度等参数。
四、优势1.自动化程度高:通过传感器实时监测土壤参数,并根据事先设置好的控制算法进行处理,实现对灌溉水和肥料的自动控制,免去了人工操作的繁琐和容易出错的问题。
基于PLC技术的自动化灌溉施肥系统的设计
农 机 化 研 究
第 9期
基 于 P C 技 术 的 自 动 化 灌 溉 施 肥 系 统 的 设 计 L
李 伟
( 南机 电高 等专 科 学 校 机 电工程 系 ,河 南 新 乡 河 摘 430 ) 5 0 2
要 : 随 着 我 国农 业 科 技 的 发展 , 灌 施 肥 智 能 化 控 制 技 术 越 来 越 引 起 人 们 的关 注 , 为 未 来 优 质 高 效 设 施 滴 成
部分构成。主水 管路 由过滤器 、 压力 表、 流量表 以及
阀门组成 , 用来获得 系统所 需压力 和流量 , 保护滴 灌
收 稿 日期 :2 1 — 6 1 00 0 — 1 基 金项 目:河 南省科技攻 关项 目( 5 4 6 0 1 0 2205 )
作 者简介 :李
伟 (91 ) 男 , 1 8 一 , 河南 新 乡人 , 师 , 讲 硕士 研究 生 , E ( —
关键词 :P C技术 ;自动化灌溉施肥 系统 ;变频 技术 L
中图分 类号 :T 2 3 . ; 2 4 2 P 7 5 ¥ 2 . 文献标识码 :A 文章编号 :1 0 - 8 X( 0 1 0 - 1 7 0 0 3 1 8 2 1 )9 0 0 - 3
0 引言
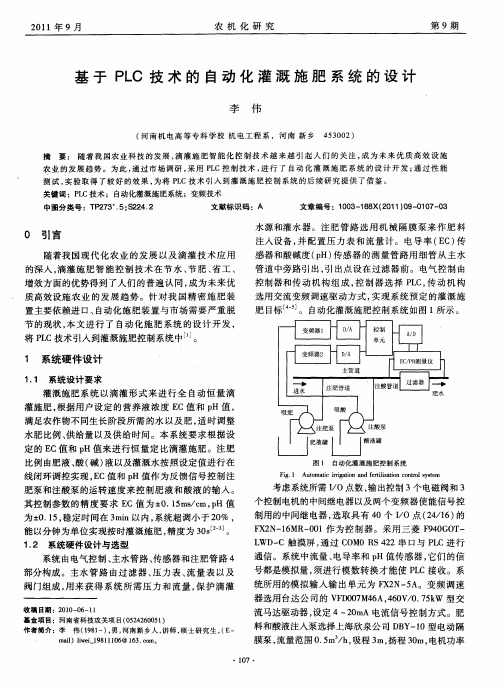
随着我 国现代化农 业 的发展 以及 滴灌技术 应用 的深入 , 滴灌 施肥智 能控制技 术在节水 、 节肥 、 工 、 省 增效方面的优势得到了人们 的普遍认 同 , 成为未来优
农 业 的 发展 趋 势 。为此 , 过 市 场 调 研 , 用 P C控 制技 术 , 行 了 自动 化 灌 溉 施 肥 系统 的设 计 开 发 ; 过 性 能 通 采 L 进 通
测 试 , 验 取 得 了较 好 的 效果 , 实 为将 P C技术 引入 到 灌 溉 施肥 控 制 系 统 的后 续 研 究 提 供 了借 鉴 。 L
基于PLC控制的自动灌溉系统的设计
三相异步电动机在起动过程中,会产生很大的启动电流(通 常为额定电流的6倍)。为了避免电网产生较大的压降,要 求启动电流不能太大,同时希望产生足够大的启动转矩。为 了降低电压,减小电流,我们采用Y/△启动,这种启动是最 常见也是最常用的一种降压启动电路。Y/△启动电路是指电 动机启动时,把定子绕组接成星形,以降低启动电压,达到 减小启动电流的目的;待电动机启动后,再把定子绕组改接 成三角形,使电动机全压运行。故本系统采用降压启动方式, 当按下启动按钮时,首先继电器KM1接通,电机运行,带动 水泵抽水,过段时间,KM1断开,继电器KM2接通,即完成Y /△启动。
基于PLC控制的自动灌溉 系统的设计
程仕文 103521008
背景和意义 我国水资源短缺,利用率低,水浪费严重,供需矛盾 突出。传统灌溉设备单一,灌溉难度大,费时费力, 严重制约我国社会经济的发展。因此需要合理灌溉, 发展自动灌溉系统。 发展自动灌溉系统对于缓解水资源紧缺矛盾、节约劳 动力,扩大灌溉面积、提高农业综合生产能力具有十 分重要的意义。合理的灌溉是农作物正常生长发育并 获得高产的重要保证,可取得良好的生理效应和生态 效应,增产效果显著。
电机Y/△启动的梯形图如图,当X000闭合时,Y000常开触 点闭合,电动机先星形启动,0.2秒后Y000常开触点断开, 常闭触点闭合,Y001常开触点闭合,电机三中国农业的发展现状, 中国农业生产的现代化改造已经是迫在眉睫,并且国 家实施的大力加强社会主义新农村建设等举措,也为 中国农业的现代化建设提供了有利的契机。而在农业 的现代化建设中最重要的任务之一就是农村水渠灌溉 系统的现代化改造。
C类植物:通过实时钟来实现灌溉系统在规定时间段启动或断开,每 隔一天的晚上23:00灌溉一次,这里用两个计数器已达到延时10分钟 的目的,这样就达到了每次浇灌10分钟的目的。每隔一天即隔48小 时候的23:00喷头2在此喷水。三号点击运转带动水泵3工作,控制喷 头2,浇灌C类植物。这里关键是把计数器作为时间继电器用。
基于模糊PLC的施肥灌溉控制系统的研究
摘要现代设施农业是利用围护结构设施,把一定的空间与外界环境隔离开来,形成一个半封闭式系统,在充分利用自然环境条件的基础上,改善或创造更佳的环境气候,为植物和动物生长提供良好的环境条件,从而进行更有效的生产。
设施农业包括设施栽培和设施养殖两个方面。
设施栽培技术中,微喷灌技术使施肥有更先进的方法,即水肥技术。
水肥技术就是将作物所需的养分溶于水,形成高浓度的营养液母液,再在作物需要施肥时,将营养液母液与水混合成一定浓度的营养液,通过微灌系统提供给作物,对作物的生长发育有重要影响,因此,营养液混合技术己经成为灌溉自动控制中的一项关键技术。
灌溉自动控制模式与人工控制方式相比,具有节省水、肥、能量、杀虫剂、人工等优点,并可基本消除在灌溉过程中人为因素造成的不利影响,提高操作的准确性,有利于灌溉过程的科学管理和先进灌溉技术的推广。
同时通过灌溉控制系统适时、适量的浇水,提高作物产量,有利于我国广大农村劳动力的转移和农村经济结构的调整,同时,对环境保护也起到一定的作用。
本文从现代设施农业的发展需要着手,介绍了自动灌溉控制系统的构成,详细的介绍自动灌溉控制中营养液配置这一关键性技术的解决方法。
结合当前这个领域的实际,提出了利用模糊控制逻辑解决营养液的在线配置问题。
详细的介绍了营养液配置中模糊控制器的构成,并构造简单的实验验证模糊控制器的合理性及模糊控制器采样时间的设计问题。
利用PLC这一先进的工业控制设备来控制农业设备,更加体现了PLC可以适应恶劣环境这一重大特点。
关键词:施肥灌溉;模糊控制; PLCAbstractEstablishment Agriculture is using some equipment to enclose an interspace, forming a semi-close system. The system provides with more feasible climate condition, which accelerating plant or animals growth and so that output enhanced.Establishment Agriculture consists of two parts. One is established planting, the other is established breeding. In the field of established planting, micro-spray technology makes a promotion to fertilization methods, so-called fluid fertilizing technology. This kind technology dissolves the nutrient plant needed into water and gets original liquid. When fertilizing plant, we only need to adjust thickness with water and fertilize by micro-spray. These must be helpful to plant growth, so getting mixture is key of the micro-spray auto control.Comparing auto control model with manual work, there are many advantages, such as save water, fertilizer, energy, pesticide, physical force and so on. In addition, auto control model can avoid disbennifit infection by human factors, improve operate veracity. Moreover,the model is good for scientific management and advance technic spread. This paper embarks from development of modern establishment agriculture introducing detailedly about the mixture technology in the auto control spray system. Considering the fact of this field, I put forward utilizeing Fuzzy control to solute mixture online. Particularly introduce the comprising of Fuzzy controller, and design experiment to prove controller rationality and get reasonable sample time.From the development of modern agricultural facilities, introduced to control system of automatic irrigation, detailed introduces automatic irrigation control of the key technology configuration nutrient solution. Combining the current field, puts forward the practical fuzzy control logic to solve problem of online. Detailed introduces the nutrient allocation of fuzzy controller with simple structure, and the experimental results verify the rationality of the fuzzy controller and the fuzzy controller design problem of sampling ing the advanced PLC to control the industrial control equipment of agricultural equipment, manifested the PLC can adapt to bad environment this important characteristics.Keywords:Fertilize spray;Fuzzy control;PLC目录第1章绪论 (1)1.1 现代设施农业和施肥灌溉技术介绍 (1)1.2 施肥灌溉系统方案概述 (2)1.3设计目的 (3)1.4 课题研究的主要内容 (4)第2章施肥灌溉控制系统总体设计 (5)2.1 系统设计流程 (5)2.2 系统硬件的选择 (9)2.3 PLC的I/O分配 (13)2.4 硬件接线图 (14)2.5 PLC程序流程图 (16)2.6本章小结 (17)第3章营养液混合模糊控制器 (18)3.1 模糊控制系统概述 (18)3.2 模糊控制基本原理 (19)3.3 营养液在线混合控制原理与特点 (19)3.4 营养液混合模糊控制器实现 (21)3.5 本章小结 (25)第4章施肥灌溉控制系统中模糊控制实现 (26)4.1 模糊控制流程图 (26)4.2模糊控制周期选择 (27)4.2 模糊控制的实现 (28)4.3本章小结 (29)结论 (30)参考文献 (31)致谢 (32)附录1 (33)第1章绪论近几年来,随着水资源的日趋紧张,世界各国都在积极探索行之有效的节水途径和措施。
基于PLC的植物灌溉控制系统设计
T e Pln r a in Co t l se d sg a e n P C h a t i t n r t m e in b s do L Ig o r o Sy
W ANG . o Lib
( dn agt ce o eeMu aj n 500C i ) Muajn e hr c lg, dn ag17 0 h a i a s l i n
摘 要 : 可编程控制器 ( 1 P C)在 自动控制系统 l {的应用越来越广泛, 史主要 /绍 姆 尼公 牛, c l (点可编程控制器在 l 小 、 的 P H 4)
植 物 灌 溉控 制 系统 L 的噍 用 , } l 主要 介 绍 了系 统 控 制 要 求 、 硬 件设 计 及 软 件 没计 。 关键 词 : LC;I O 通道 分 ;梯 肜 圈 P / 中图 分类 号 : M5 16 T 7 .l 文 献标 识 码 : B 文 章 编 :0 3 2 1 (0 7 9 0 0 2 1 0 7 4 2 0 )0 0 7 0
的运行与停止及各 电磁阀的开关。
制和通信等技术的—种新型通用工业控制装置 , 它具有结构简单、
编程方便 、可靠 『高等优点 , 生 已广泛应用于工业生产过程和装置 的自动控制 中, 成为工业控制 的主要手段和重要的基础控制设备 之一。 随着3 C MP TE C r L C MMUNI AT O C( O U R、 O R0 、 O C I N) 技术的突飞猛进 ,L P C的功能不断加强 ,L 的工作方式与工业控 PC
止; 区采用旋转式喷头进行喷灌, B 分为二组喷灌工作, 每组工作5
分钟 , 2 分钟 , 9 停 0 每天 点开始 ,4 l 点停止 ; C区分为二组 , 交替工 作 , 天灌溉一次。 每2 控制系统的工作方式有手动和 自 动二种控制
PLC控制智能化施肥灌溉系统毕业设计
PLC控制智能化施肥灌溉系统1 绪论农业生产中,各种各样的农产业、蔬菜瓜果在生产过程中出现了很多不便和浪费,而智能化施肥灌溉控制系统设计通过实际应用带动生产。
通过智能化施肥灌溉不仅能节水、节肥,还可以提高肥料利用率,同时智能化的作用让其更方便简单,减少不必要的劳动力损耗,和传统的施肥灌溉有很大的变化,综合作用更强、更可靠。
施肥灌溉是将施肥与灌溉结合在一起的一种先进农业技术,它是通过压力灌溉系统,配合使用固体或液体肥料,从而产生含有作物营养需求的灌溉水进行施肥灌溉。
1.1 智能化施肥灌溉的提出在当今社会中,农业的发展必不可少,所以降低损失提高产物量是迫在眉睫的。
由于经济技术水平落后,很多农民浇地一般都采用大水漫灌,这是一种落后的、粗放的灌溉方式,其缺点较多。
一是浪费水严重;二是大量多余水渗入地下,导致地下水位升高,水蒸发量增大,作物产量下降;三是肥料流失严重。
漫溉会使水累积在田地里面,不仅浪费水源还会导致作物窒息,许多供作物生长的有机成分溶入水中,渗入地下,造成肥料深层渗漏,让作物不能吸收所需原料。
灌水量较多,致使灌溉成本升高,使有机肥料不被吸收浪费肥料,特别是在蓄水灌溉区域,浪费电力、人力更为突出,现在农业发展水平对施肥灌溉管理的要求,进一步证明农作物自动化控制施肥灌溉的必要性。
本课题主要是对施肥灌溉及对营养液摄取的研究。
现在采用智能化施肥灌溉技术控制是一种简便易行的施肥灌溉方式,这种方式投入资金少,见效快,简单易学还方便更好的灌溉施肥。
以往的灌溉水每亩次灌水量高达70~80立方米,比实际作物需水量高出40%左右。
土壤是一个复杂的四维异质体,其中包含许多使植物养分失效的因子,无机化学肥料施入土壤后,只有部分养分被作物吸收,有的分子或离子以气态损失,有的则被土壤固定,有的则随地下水而流失污染了水源、河流和湖泊。
不难想象,这种施肥灌溉方式不仅化肥利用率低造成环境污染,所浪费的肥料和水量也很庞大。
伴随近年来农业技术生产水平的发展,自动化控制是现代农业发展的必由之路。
基于PLC的灌溉系统的应用与研究
1 . 2 硬 件
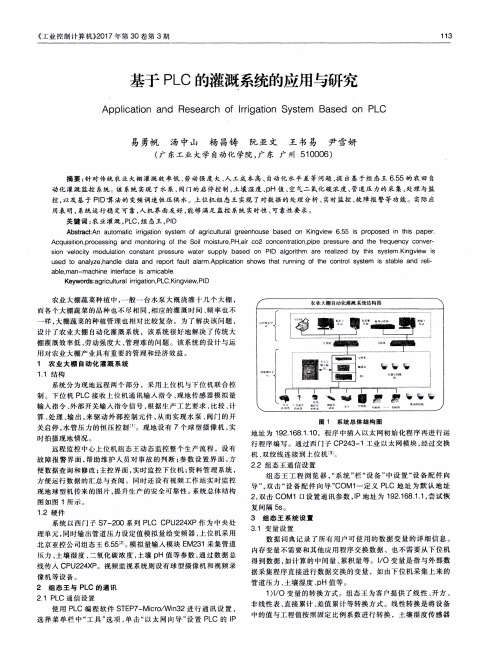
图 1 系统 总 体 结 构 图
地址 为 1 9 2 . 1 6 8 . 1 . 1 O ,程 序 中插 入 以太 网初 始 化 程 序 再 进 行 运 行 程 序编 写 。通 过 西 门 CP 2 4 3 — 1工业 以 太 网模 块 , 经 过 交 换 机、 双 绞 线 连 接 到 上 位 机 。 。 。 2 2 组 态 王 通 信 设 置 组态王 工程浏 览器 , “ 系统 ” 栏“ 设备 ” 中设置 “ 设 备 配 件 向 导” , 双击 “ 设 备配 件 向导” C OM1 一定 义 P L C 地 址 为 默 认 地 址 2 , 双击 C OM1口设 置 通 讯 参 数 , I P地 址 为 1 9 2 . 1 6 8 . 1 . 1 , 尝 试恢
u s ed t o a n al y z e, h an dl e da t a an d r e po ̄ f a ul t a l a r m Appl i c at i on s h o ws t h a t r u nn i n g o f t h e c on t r ol s y s t e m i s s t ab l e a n d r el i —
动化 灌溉 监 控 系统 。 该 系统 实现 了水 泵 、 阀 门的 启 停控 制 , 土壤湿度 、 p H值 、 空 气二 氧 化 碳 浓 度 、 管道压力的采集、 处理 与 监
控, 以及 基 于 P I D算 法 的 变频 调 逮 恒 压 供 水 。上位 机 组 态王 实现 了对 数 据 的 处 理 分 析 、 实 时监 控 、 故 障报 警 等功 能 。实 际应 用表 明 , 系统 运 行 稳 定 可 靠 . 人机 界 面 友好 , 能 够 满 足监 控 系统 实 时性 、 可靠性要求。
基于PLC的智能灌溉系统设计
本 文基 于 PLC技术和 电力 电子 技术 ,采
转换成模拟 电信号 后输出到 电机 , 电机控制 阀 用软硬件结合 ,较好的完成了对容器 内液体 高
1 引 言
门,控制水 的流量 ,使得水箱的液位保持设定 度 的控 制。在本设计中 ,完成 了以软件 方式对 值 。水箱 的液位压力 变化 经压力传感器检测转 液位信 号的串级处理,液位检测单元采用静压
Software Development· 软件开发
基 于 PLC的智能灌溉 系统设计
文/吴尚润 于宏 涛 郝宇 邢献伟 宋金阳
要 的,需要对 其进行整定 ,可 以采用响应 曲线 号。PLC主 控 系统 内部 的 A/D将进 来 的 电压
针对 如何 能有效 率地 减 少灌 溉 系统 水 资源 浪 费问题 ,本文 应 用 PLC设计 了一个智能灌溉 系统, 通过 用 户设 定水 位值 ,液 面变化
液位 传感 器将 感受 到 的水位 信号传 送 到
力式液位变送 器,其优点是水位的变化和输 出 电压信 号的变化呈线性 关系,能完成 O—l米水 位 的精确测量 ,并通 过电机 驱动模块对 电机正 反转控 制来 实现抽 水和加水,从而实现对水位 的控制 ,并通 过液 晶显示技术对当前水位是实 现实时显示和监测 。针对 我国大部分的灌溉系 统水资源利用率不 高问题 ,本系统将是一个 比 较理想 的智能灌溉系统 。
水 是 一切生 命过 程 中不可 替代 的基本 要 素 ,也是 维系国民经 济和社会发展的重要基础 资源 。近 年来 随着科 技不断进步,经济高速发 展 ,水 资源危机开始显现并 日渐明显。随着中 国农业现代化 进程的高速发展、农业结构的调 整 ,节水灌溉 自动化 技术的要求越 来越高,灌 溉控制器在我 国有着 巨大的市场 。本 文引入 了 可编程逻 辑控制 (PLC),供水系统采用基 于
第1章基于PLC的全自动灌溉控制系统的设计的原理
第1章基于PLC的全自动灌溉控制系统的设计的原理1.1 绪论当前,随着电气信息技术在节水灌溉工程中的应用,发达国家如美国、以色列、荷兰、加拿大、澳大利亚等成功开发了一系列用途广泛、功能极强的灌溉控制器。
而我国在开发灌溉自动控制系统方面与发达国家差距较大,还处于研制、试用阶段,随着水资源的日趋紧张及信息技术的发展,开发具有自主知识产权的节水灌溉控制系统不仅具有广阔的市场前景,而且具有巨大的社会效益。
本文以松下公司 F P 1系列的P L C为核心,选用 C AO C型可编程控制器来开发了一套灌溉控制系统,所开发的控制系统能手动设置对各轮灌区定时灌溉,也可以通过土壤湿度传感器与控制器形成全自动闭环控制系统。
同时为了减少水泵电机启动电流,减轻对电网形成的冲击,减小能耗,水泵电机采用 Y/△启动。
1.2 制系统各部分功能及设计控制系统包括电机 Y/△启动,手动控制模式自动控制模式。
因本系统除了湿度传感器和雨量传感器输人为模拟量外,其他输入出均为数字量,编程控制器本身的抗干扰能力能满足要求。
P L C的容量包括 I / O点数、用户存储器的容量。
系统采用 F P 1可编程控制器专用编程软件编制梯形图。
1.2.1 Y/△启动系统要求当按下启动按钮时,首先电动机运行,带动水泵抽水同时系统中电机采用 Y /△启动,启动时继电器KMY接通。
2s 后KMY断开,继电器KM△接通,即完成 Y/△启动。
1.2.2 手动灌溉模式系统具有手动设定各电磁阀的开启时间和开启顺序的功能,当某个电磁闭合时相应的指示灯亮。
当雨量传感器有信号,即下雨时,将停止灌溉,同时雨量报警器报警,本灌溉系统要求为一号灌区灌溉10min,打开2号灌区电磁阀灌水5 min,然后打开3 号灌区电磁阀灌水15min,最后停止灌溉。
1.2.3 自动灌溉模式本灌溉控制器能根据土壤湿度传感器得到的土壤湿度信号,与设定的适于作物生长度进行比较,然后决定是否灌溉,自动进行电机与各电磁阀的起闭。
基于PLC模糊控制的温室灌溉控制策略研究
澎 学 学 21第 期 江 辛 0 年 6 1
文 献 著 录格 式 :王 智 乾 ,柯 建宏 .基 于 P C模 糊 控 制 的 温 室灌 溉控 制 策 略 研 究 [] L J .浙 江 农 业 科 学 ,2 1 ( ) 4 8—13 0 1 6 :12 42
基 于 P C模 糊 控 制 的温 室 灌 溉 L 控 制 策 略研 究
因为温室 空 间有 限 ,较为 封闭 ,土壤 湿度 的骤然 增
大 必会 引起其他 环境 因子 的变化 ,如 果处理 不好 很 容 易出现 低温 高湿导 致作 物沤根 。露 天灌溉 可 以不 考 虑这些 问题 ,但在 温室灌 溉 中 ,却 是需要 合理 处 理 的关键 问题 。温 室 中环 境 因子 的耦 合关 系十分 复
很 难得 到最合 适 的水 分补 给 ,生产效 率取决 于农 民
这种 技术 进行灌 溉 ,并 向节能 、节水 、节省 劳 动力
和全 自动 控制方 向发 展 。 本文 旨在温 室环 境下 作灌溉 系统 的研究 探讨 。
1 温 室 灌 溉 的特 点
温室 是一个 封 闭的系 统 ,受 外界 的影 响干扰 较
王 智乾 ,柯 建பைடு நூலகம்
( 昆明 理 工 大 学 机 电工 程 学 院 ,云南 昆 明 609) 5 0 3
摘 要 :针对 我 国温 室 灌 溉 自动 化 程 度 较 低 的 情 况 ,介 绍 了 可 编 程 控 制 器 ( L P C) 在 温 室 灌 溉 控 制 中 的 应 用 。 根据 温室 灌 溉 系统 不 易 建 立 精 确 数 学 模 型 的 特 点 ,引 入模 糊控 制理 论 ,实 现 实 时 精 确 灌 溉 。 系 统 操 作 简 单 ,
基于PLC的模糊控制灌溉系统的研制
第23卷第6期2007年6月农业工程学报T ransacti ons of the CSA E V o l .23 N o.6June 2007基于PL C 的模糊控制灌溉系统的研制谢守勇1,2,李锡文2,杨叔子2,何丙辉1(1.西南大学工程技术学院,重庆400716; 2.华中科技大学机械科学与工程学院,武汉430074)摘 要:该文利用模糊控制技术实现灌溉实时控制。
利用M A TLAB 语言对其进行仿真,得到了较为合理的模糊控制算法。
并将这些模糊控制算法通过以可编程控制器PL C 为核心的硬件控制电路应用于实际的灌溉控制,通过实际温室育苗调试,能够较好地满足温室育苗使用要求。
关键词:PL C ;灌溉系统;模糊控制中图分类号:S 625+.1 文献标识码:B 文章编号:100226819(2007)620208203谢守勇,李锡文,杨叔子,等.基于PL C 的模糊控制灌溉系统的研制[J ].农业工程学报,2007,23(6):208-210.X ie Shouyong ,L i X i w en ,Yang Shuzi ,et al.D esign and i m p lem entati on of fuzzy contro l fo r irrigating system w ith PL C [J ].T ransacti ons of the CSA E ,2007,23(6):208-210.(in Ch inese w ith English abstract )收稿日期:2006206219 修订日期:2007203216基金项目:科技部十五重大专项(2001BA 04A )作者简介:谢守勇(1969-),男,副教授,博士研究生,研究方向为设施农业及农业自动化研究。
重庆 西南大学工程技术学院,400716。
Em ail :xsys w u @0 引 言在温室育苗生产中,粗放的灌溉方式与落后的灌水技术已不适应现代农业的要求,发展节水灌溉势在必行。
基于PLC的水肥一体机控制系统设计与开发

基于PLC的水肥一体机控制系统设计与开发1. 引言1.1 研究背景水肥一体机是一种集水肥施肥于一体的先进农机设备,能够实现精准施肥和灌溉,提高农作物产量和质量,节约劳动力和资源。
随着农业现代化的发展,人们对水肥一体机控制系统提出了更高的要求,希望能够实现智能化、自动化的操作。
研究水肥一体机控制系统的背景是为了提高农业生产效率,实现农业智能化、现代化发展。
通过对PLC技术的应用和系统设计,可以使水肥一体机控制更加精准、稳定,从而达到节约资源、提高农作物产量和质量的目的。
本研究具有重要的理论意义和实践价值。
1.2 研究意义水肥一体机是现代农业生产中的一种重要设备,其可以实现自动化的灌溉和施肥,提高农作物的生长效率,减少人力占用和资源浪费。
研究水肥一体机控制系统设计与开发,可以提高农业生产的智能化水平,降低生产成本,提升农业生产效益,促进农业现代化进程。
基于PLC的水肥一体机控制系统设计与开发,能够实现对水肥一体机的精准控制和监测,提高设备的稳定性和可靠性。
通过引入PLC技术,可以实现对灌溉和施肥过程的智能化控制,根据作物的需水需肥量进行精准施肥,避免因为施肥不当导致的废弃和浪费,提高肥料利用率,保护土壤和环境。
研究基于PLC的水肥一体机控制系统设计与开发,对于推动农业现代化、提高农业生产效率和质量、保障粮食安全具有重要意义。
随着农业生产的技术进步和智能化程度的提高,农民的生产水平和收入也将得到提升,对我国农村经济的稳定和发展具有积极的促进作用。
深入研究水肥一体机控制系统设计与开发的意义重大,对于农业现代化和可持续发展具有重要意义。
1.3 研究现状目前,随着农业现代化的发展,农业生产中对水肥一体化设备的需求日益增加。
传统的水肥施肥方式存在着肥料利用率低、水资源浪费严重等问题,因此急需一种更加智能、高效的水肥一体化设备。
近年来,国内外对基于PLC的水肥一体机控制系统进行了大量研究,取得了一定的成果。
目前,国内多数研究集中在水肥一体机控制系统的设计和实现,主要聚焦在系统功能设计、硬件设计以及软件设计等方面。
MCGS和PLC在智能灌溉监控系统中的应用研究
MCGS 和PLC 在智能灌溉监控系统中的应用研究牟淑杰(辽宁石油化工大学职业技术学院,辽宁抚顺113001)摘要 根据智能灌溉系统的特点,设计了以M C GS 组态软件和PLC 为控制核心的智能灌溉监控系统,该系统具有界面友好,易于操作,运行可靠,便于更改、扩充、升级等优点。
运行结果表明,该系统设计合理,性能可靠,具有较好地自适应性,易于在线应用。
关键词 智能灌溉系统;M C GS ;PLC ;监控系统中图分类号 S625.5+1 文献标识码 A 文章编号 0517-6611(2011)07-04258-01App li cation R esearch onMCGS and PLC i n Intelligent Irri gati on M onitori ng Syste m MU Shu jie (V ocati onal and Techn i cal Co llege ,L iaoni ng Un i versity o f Petro l eu m &Che m i calT echno l ogy ,Fus hun ,L iaoni ng 113001)Abstract A ccordi ng t o t he i ntelli gent irri gati on s yste m feat ures ,the i ntelli gent irri gati onmonit o ri ng s yste m w as desi gned by taki ngM C G S and PLC as contro l kerne,l t he syste m have t he characteristi cs of user friendly i nterface ,easy t o operate and runs reliabl y .M o reover ,it is easy to change ,expand and update .The t est sho w s t hat t he syste m have t he f eatures of rati ona ldesi gn and reli abl e perfor mance ,better self adaptab ili ty and easy to use onli ne .K ey words Intelli gent irr i gation s y ste m ;M CGS ;PLC ;M onit or i ng syste m作者简介 牟淑杰(1975-),女,辽宁抚顺人,讲师,硕士,从事自动化专业的教学与研究工作,E m ai:l m ushu ji e_2008@163.co m 。
基于PLC的水肥一体机控制系统设计与开发
基于PLC的水肥一体机控制系统设计与开发随着农业生产的发展,水肥一体机被广泛应用于农田灌溉和施肥,具有节水、节肥、减少劳动强度等优点。
基于PLC的水肥一体机控制系统可以实现对灌溉和施肥过程的自动化控制,提高农田的生产效率和质量。
本文将介绍基于PLC的水肥一体机控制系统的设计与开发。
我们需要确定控制系统所需的功能。
基于PLC的水肥一体机控制系统通常需要实现以下功能:水泵的控制、阀门的控制、液体肥料的喷洒控制、施肥液的浓度监测、土壤湿度监测等。
这些功能可以通过PLC的输入输出模块来实现。
接下来,我们需要设计控制系统的硬件部分。
基于PLC的水肥一体机控制系统通常包括PLC、传感器、执行机构等设备。
传感器用于监测土壤湿度、液体肥料浓度等参数,执行机构用于控制水泵、阀门的开关。
根据实际需要选择合适的传感器和执行机构,并与PLC进行连接。
然后,我们需要开发控制系统的软件部分。
基于PLC的水肥一体机控制系统的软件开发可以使用Ladder逻辑进行设计。
Ladder逻辑是一种图形化的编程语言,易于理解和编写。
通过Ladder逻辑,可以实现对水泵、阀门的控制,及时响应传感器的数据,调节施肥液的浓度等功能。
我们需要进行控制系统的调试和测试。
在调试和测试阶段,我们需要检查软件逻辑是否正确,是否可以正常控制水泵、阀门的开关,是否能够准确测量土壤湿度和施肥液浓度。
如果发现问题,需要进行相应的调整和修改,直到控制系统能够正常运行。
基于PLC的水肥一体机控制系统的设计与开发需要确定功能需求,设计硬件部分,开发软件部分,以及调试和测试。
通过合理的设计和开发,基于PLC的水肥一体机控制系统可以实现高效、精确的农田灌溉和施肥,为农业生产提供技术支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
混合罐液面过低
温度过高开关量 温度适中开关量 光照过强开关量 光照适中开关量 遮阳棚开限位 遮阳棚关限位
输出信号 器件代号 KM1 KM2 KM3 KM4 KM5 KM6 KM7 KM8 KM9 KM10 地址编码 Y0 Y1 Y2 Y3 Y4 Y5 Y6 Y7 Y10 Y11 功能说明 主水泵 注水电磁阀 肥料电磁阀 酸液电磁阀 搅拌机 施肥加压泵 灌溉电磁阀1 灌溉电磁阀2 灌溉电磁阀3 风机
主水 施肥加压泵 灌溉电磁阀1 灌溉电磁阀 灌溉电磁阀3 风机 报警 空气泵 遮阳棚开 遮阳棚关 反向冲洗
X0 X1 X2
FX2N-48MR-001
X3 X4 X5 X6 X7 X10 X11
COM
Y3 Y4 Y5 Y6 Y7 Y10 Y11 Y12 Y13 Y14 Y15 Y16 COM
L
系统总启动/总停止 报警消音 混合罐液面过高 混合罐液面过低 温度过高开关量 温度适中开关量 光照过强开关量 光照适中开关量 遮阳棚开限位 遮阳棚关限位
~
220V N Y0 Y1 Y2 KM1 KM2 KM3 KM4 KM5 KM6 KM7 KM8 KM9 KM10 KM11 KM12 KM13 KM14 KM15 24V
开始
初始化
输入营养液设定值
到施肥时间 Y 采样时间
N
模糊控制程序流程图
计算E、EC并模糊量化
查询模糊控制表
指令输出
时间到? Y 结束
N
谢谢各位老师!
KM11
KM12 KM13 KM14
Y12
Y13 Y14 Y15
报警
空气泵 遮阳棚开 遮阳棚关
开始 自检
检测传感器状态
温度过高? N
Y
启动风机5min
光照过强? N
Y
启动遮阳棚20min
Y 压力超过设定值? N N 反向冲洗5min
PLC程序流程图
液面过高或过低? Y 报警 液面模糊控制器
PH值模糊控制器 灌溉
时间到? Y 结束
N
营养液混合模糊控制器
• • • • • • 模糊控制系统一般分为四个部分 : 1.模糊控制器 2.输入输出接口装置 3.广义对象 4.传感器 本系统采用二维模糊控制器,以偏差e和偏 差变化△e作为输入变量
模糊控制系统框图
模糊规则 e 给定值r Δe k2 k1 输 入 模 糊 化 比 例 因 子 Ka
模糊决策 模糊控制器
判 决
被控对象
检测
模糊控制器参数
• 1.选择模糊语言变量并定义其论域 因为本系统延迟很大,并且由于混合罐中 水流的放置混合方式使检测到的PH值、EC 值的波动大,e和△e的模糊语言值和论域等 级不宜过多。 2.确定各语言变量隶属函数 3.量化因子及其确定方法
模糊控制查询表
EC E -4 -3 -2 -1 0 1 2 3 4 -4 4 3 3 3 2 2 2 1 0 -3 3 3 3 3 2 2 1 0 -1 -2 3 3 3 2 2 1 0 -1 -2 -1 3 3 2 1 1 0 -1 -2 -2 0 2 2 1 1 0 -1 -1 -2 -2 1 1 1 1 -1 -2 -3 -3 -3 -4 2 2 1 1 -1 -2 -2 -3 -3 -3 3 1 1 -1 -2 -2 -3 -3 -3 -3 4 0 -1 -2 -2 -2 -3 -3 -3 -4
基于模糊PLC的施肥灌溉控制系 统的研究
课题研究的主要内容
• 在设施栽培中,根据用户设置的灌溉 与施肥方案,实现自动灌溉与施肥,或根 据不同作物的不同需要,实现不同营养液 的在线的自动混合控制,并应用PLC主控 制器,通过控制灌溉用电磁阀的开启与关 闭,实现自动灌溉。
•
营养液的混合在混合罐中进行,采用 模糊控制,选用文丘里管吸肥,通过检测 混合后主管中灌溉水的营养液浓度作为反 馈,控制营养液母液注入管路电磁阀的开 启与关闭,以实现营养液浓度在线混合, 自动控制。
EC PH传感器 压差传感器
CH1 CH2
FX2N-4AD
PLC的输入输出分配表
输入信号 器件代号 SB1 SB2 液位传感器1 地址编码 X0 X1 X2 功能说明 系统总启动/总停止 报警消音 混合罐液面过高
液位传感器2
温度传感器1 温度传感器2 光照传感器1 光照传感器2 SQ1 SQ2
X3
自动灌溉控制系统的构成
水 源 主水泵 过滤器 稳压阀 电磁阀1 传感器 施肥泵 电磁阀2
混合罐 PLC 电磁阀20 灌溉区域管网
电磁阀
电磁阀
电磁阀
施肥器
施肥器
施肥器
酸液
肥料罐1
肥料罐2
PLC主机机型的选择
体积小,功能强大,可靠性高,编程及 设定参数简单方便,具有通讯接口,继电器 输出,选择转换精度较高的A/D模块,我们 采用三菱系列的PLC , 型号为FX-48MR-001 24入,24出。PLC扩展模块选择 FX-4AD 。