APFC+PWM(电路图)
脉冲电路PWM调制PPT课件

脉冲宽度
指高电平持续的时间,通常用占空比表示,即脉冲宽度与周期的比 值。
PWM调制的基本原理
通过改变脉冲宽度来等效改变输出电压或电流的大小。
PWM信号的生成原理
采样控制理论
PWM信号的生成基于采样控制理论,通过对输入信号进行采样,并根据采样结果生成相 应的PWM信号。
电流模式控制PWM调制是通过检测输出电流的占空比来实现对输出电流的控制。
电流模式控制PWM调制具有电流响应速度快、控制精度高等优点,因此在许多应用 中得到广泛应用。
电流模式控制PWM调制的主要缺点是可能会产生较大的输出电流纹波。
电压和电流模式比较
电压模式控制PWM调制和电流模式控制PWM调制各有优缺点,具体选择哪种方式要根据 实际应用需求来决定。
PWM调制技术在能源转换、电机控制、通 信等领域具有广泛的应用前景,随着技术 的不断成熟,其应用领域将进一步拓展。
经济价值
社会效益
PWM调制技术的推广应用将带来显著的经 济效益,有助于推动相关产业的发展和经 济增长。
PWM调制技术的节能减排效果明显,对于 应对全球气候变化、推动可持续发展具有 重要意义。
04 PWM调制在脉冲电路中 的优势与挑战
PWM调制在脉冲电路中的优势
高效能
PWM调制能够有效地控 制脉冲宽度,从而提高 脉冲电路的能量效率。
灵活性高
PWM调制允许在单个脉 冲中实现多个级别的电 压或电流,从而提供更
大的灵活性。
易于实现
PWM调制可以通过简单 的数字或模拟电路实现, 降低了设计和实现的复
线性度
PWM信号的线性度取决于采样电 路和PWM生成电路的设计,高质 量的PWM信号应具有良好的线性
APFC直流稳压(ACDC)电路仿真研究.

APFC直流稳压(AC/DC)电路仿真研究090607344 郑太锋指导教师刘继伦讲师内容摘要传统的整流变换电路(AC/DC)存在功率因数低、输入电流畸变的问题。
本文对常用的AC/DC变换电路进行了研究,设计了升压型APFC(Active Power Factor Correction,有源功率因数校正)电路模型和参数,并对模型进行了仿真。
结果显示,该电路具有提高功率因数、减小输入电流畸变的功能,对功率因数校正电路的设计有一定的参考价值。
关键词有源功率因数校正; AC/DC变换器; 电流环控制APFC直流稳压(AC/DC)电路仿真研究一绪论为了保证开关电源的输电流谐波能够达到谐波标准的要求,绿化电网环境,有源功率因数校正(Active Power Factor Correction,APFC)技术已经成为当今电力电子学领域十分活跃和颇具研究价值的热点。
直接接入电网的开关电源应用非常普遍,一般来说,其前置级AC/DC 变换部分都采用图1所示的二极管桥式整流加大容量电容滤波电路。
虽然输入的交流电压是正弦波行,但输入的交流电流却呈脉冲状,波形严重畸变,如图2所示。
图1AC/DC 整流电路图2输入电压,输入电流波形实践表明,在提高开关电源类装置的功率因数方面,有源功率因数校正(APFC)技术是应用最为广泛和行之有效的方法。
(一)功率因数及其校正方法根据电工学的基本理论,功率因数(Power Factor)定义为有功功率(P)和视在功率(S)的比值,用公式表示为:PF=(1-1)式中::输入电流基波有效值;:电网电流有效值,,其中,,,为输入电流各次谐波有效值;:输入电压基波有效值;:输入电流的波形畸变因数;:基波电压和基波电流的位移因数。
为畸变因数,表示基波电流有效值在总的输入电流有效值中所占的比例;为位移因数,表示输入电流与输入电压之间的相位差。
从本质上来讲,功率因数校正技术的目的是要使用电设备的输入端口针对交流电网呈现“纯阻性”,这样输入电流和电网电压为同频同相的正弦波,功率因数为1,没有谐波污染问题。
采用UC3854的有源功率因数校正电路工作原理与应用

采用UC3854的有源功率因数校正电路工作原理与应用北京信息职业技术学院 100031 路秋生简介:本文主要介绍了有源功率因数校正(APFC)的工作原理、电路分类。
并对在国内得到广泛应用的UC3854集成电路的典型应用电路、工作原理做了介绍、分析。
关键词:功率因数(PF)有源功率因数校正乘法器除法器一.功率因数校正原理1.功率因数(PF)的定义功率因数(PF)是指交流输入有功功率(P)与输入视在功率(S)的比值。
即所以功率因数可以定义为输入电流失真系数()与相移因数()的乘积。
可见功率因数(PF)由电流失真系数()和基波电压、基波电流相移因数()决定。
低,则表示用电电器设备的无功功率大,设备利用率低,导线、变压器绕组损耗大。
同时,值低,则表示输入电流谐波分量大,将造成输入电流波形畸变,对电网造成污染,严重时,对三相四线制供电,还会造成中线电位偏移,致使用电电器设备损坏。
由于常规整流装置常使用非线性器件(如可控硅、二极管),整流器件的导通角小于180o,从而产生大量谐波电流成份,而谐波电流成份不做功,只有基波电流成份做功。
所以相移因数()和电流失真系数()相比,输入电流失真系数()对供电线路功率因数(PF)的影响更大。
为了提高供电线路功率因数,保护用电设备,世界上许多国家和相关国际组织制定出相应的技术标准,以限制谐波电流含量。
如:IEC555-2, IEC61000-3-2,EN 60555-2等标准,它们规定了允许产生的最大谐波电流。
我国于1994年也颁布了《电能质量公用电网谐波》标准(GB/T14549-93)。
传统的功率因数概念是假定输入电流无谐波电流(即I1=I rms或=1)的条件下得到的,这样功率因数的定义就变成了PF =。
二.PF与总谐波失真系数(THD:The Total Harmonic Distortion)的关系三.功率因数校正实现方法由功率因数可知,要提高功率因数,有两个途径:1.使输入电压、输入电流同相位。
PWM变换电路APFC技术(PPT)
di Lr E E i Lr ( t t 0 ), uCr 0 dt Lr
5.4 准谐振软开关
du di is t1 ~t 2 : Lr Lr uCr E , C r Cr i Lr I 0 + dt dt E i Lr I 0 sin ( t t1 ), ucr E[1 cos ( t t1 )] E - Zr
1. ZVS 、 ZCS
硬 开 i 关 p
u
on
off
软 开 关 ZCS
u p
on
i
off
零流关断, 限制电流上升率开通。
5.3 软开关基本概念
Z V S p
u
i
若同时实现零压开通, 零流关断, 则称ZVZCS。
on
off
零压开通, 限制电压上升率关断。
2. 准谐振ZVS、ZCS基本电路单元
Cr Cr Lr Dr Lr Lr VT
L 设: Zr = KC(E/ I0max), KC< 1,且考虑 f r 1 L C ; Z r r C r r r
可得: Lr
K E 1 1 I 0 max C , Cr 2f r I 0 max 2f r K C E
可结合电路特点中所述选择电路元件的电压电流定额。
5.4 准谐振软开关
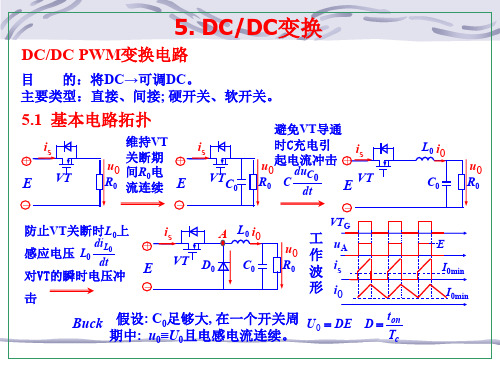
直接尚有:Buck-Boost、Cuk、Sepic 、Zeta以及桥式等。间接尚有:RCC、 推挽(Push-pull)、桥式以及Royer、Jensen等。
5.2 PWM控制实现
期望直流电压(或电流)作为调制波,通常以三角波或锯齿波作为载波,二 者交点作为开关转换点→PWM。
uc
uc U
r
三相双开关PFC电路分析及在CCM模式下的控制策略

三相双开关PFC电路分析及在CCM模式下的控制策略APFC(active power factor correction)技术就是用有源开关器件取代整流电路中的无源器件或在整流器与负载之间增加一个功率变换器,将整流输入电流补偿成与电网电压同相的正弦波,消除谐波及无功电流,提高了电网功率因数和电能利用率。
从解耦的理论来看,三相PFC技术可以分成不解耦三相PFC、部分解耦三相PFC以及完全解耦三相PFC三类。
全解耦的三相PFC,如6开关全桥电路,具有优越的性能,但是控制算法复杂,成本高。
单开关的三相boost升压型PFC电路工作在DCM模式下,属于不解耦三相PFC,由于它的成本低,控制容易而得到广泛应用,但是开关器件电压应力大,电源容量难以提高,只适用于小功率场合。
部分解耦的三相PFC电路具有低成本、高效的特点,具有广阔的应用前景。
三相双开关电路就是典型的部分解耦PFC电路。
本文针对该电路的工作原理和控制策略进行了仿真和实验。
1 三相双开关PFC电路CCM下的工作原理1.1 主电路结构电路将三相交流电的中性线与2个串联开关管S1,S2的中点以及2个串联电容C1,C2的中点相连接,构成三电平(正、负电压和零电压)结构,2个串联电容分别并联平衡电阻R1,R2,使上、下半桥作用于电容C1,C2的输出电压相等。
电路结构如图1所示。
由于中性线的存在,上下半桥相互独立,形成部分解耦的基础,并且开关器件承受的电压只有输出电压的1/2,降低了对开关管的选型要求。
在此基础上提出一些新的双开关拓扑结构,但结构复杂,难以控制。
1.2 过程分析由上述分析,上、下半桥可作为独立结构分析。
以上半桥为例,等效电路图如图2所示。
由三相电压的对称特性,每2π/3的区间里,只有一相正相电压最大,如果能使每相的瞬时电流在2π/3的区间里跟踪其最大相电压,即可实现最大程度的电流校正。
根据这样的思路,现分析[π/6~5π/6]中a相电流的变化,因为这段区间Ua最大,可分3个阶段分析。
单相有源功率因数校正电路仿真

单相有源功率因数校正电路仿真摘要:传统的AC-DC 变换器的广泛应用对电网产生了大量的谐波污染。
有源功率因数校正技术(APFC)是抑制谐波电流、提高功率因数的行之有效的办法。
本文论述了单相功率因数校正APFC 的原理和方法,通过对Boost 型滞环控制的DC-DC 变换器采用Matlab 进行仿真,获得了最后校正的功率因数结果,说明这种PFC 方案的能获得良好的效果,适用于多种场合。
关键词:有源功率因数校正,Boost 电路,滞环控制1 绪论功率因数指的是有效功率与总耗电量(视在功率)之间的关系。
功率因数可以衡量电力被有效利用的程度,当功率因数值越大,代表其电能利用率越高。
交换式电源供电器上的功率因数校正器的运作原理是通过控制调整交流电电流输入波形,使其与直流电电压波形尽可能一致,让功率因数趋近于1.折对于电力需求量达到某一个水平的电子设备而言是很重要的,否则,电力设备系统消耗的电能可能超出其规格,极可能干扰同系统的其他电子设备。
2 功率因数的定义和校正原理根据电工学的基本理论功率因数(PF )的定义:交流输入有功功率(P )与视在功率(S )的比值,用公式表示为:1111cos cos cos rms rmsU I I P PF S U I I φφγφ==== (1) 式中:1U 表示输入基波电流有效值;cos φ表示基波电压与基波电流之间的位移因数;γ表示输入电流畸变因数;rms I 表示输入电流有效值。
可见PF 由电流畸变因数γ和位移因数cos φ决定,cos φ小表示用电设备的功率大,在有功功率不变的情况下实在功率增加,线路总电流增大,线路传输压降也将增大,倒是电气设备容量增加,利用率低,导线、变压器绕组损耗大,严重影响电网的供电质量,变化快时甚至可以导致电网崩溃。
输入电流即便因数γ值低,表示输入电流谐波分量大,将造成输入电流波形畸变,对电网造成污染,使用电设备产生机械振动、噪声、过电压,损坏电子设备。
第6章3高频PWM整流器32PPT演示课件

•34
2、控制过程分析:
①整流电压VD的控制: 引入电压V0的负反馈,形成电压反馈闭环控制, 自动调节输出直流电压V0为要求值,电压调节 器采用PI。
·I s · U·AB
U·s
·
· UL
·
·
UR
•26
② Vi超前VS相角
Is与Vs的相位正好相反 变换器工作在逆变状态
·Is ·UAB
U·s
UL U·R
③Vi滞后Vs的相位
·
Is
· Us
Is超前Vs90 变换器向交流电源送出无功功率
·Is
· UAB
U·s
④ 控 制 Vi的 相 位 和 幅 值
·
可 使 is比 VS超 前 或 滞 后 任 一 角 度 UAB
②电流型PWM整流器应用不广泛的原因
◇电流型整流器输出电感的体积、重量和损耗比 较大
◇常用的现代全控器件IGBT,P-MOSFET都是有反 并联二极管反向自然导通的开关器件,为防止电 流反方向流动而必须再串联一个二极管,因此, 主电路构成不方便,且通态损耗大。
•19
2、2 交流 直流双向变换器工作原理 (1)三相大功率相控整流器主要缺点; ①对公用交流电网产生大量谐波电流并在电网中
· UL
UR
U·L U·R
可 控 制 功 率 因 数 为 任 意 正 或 负 的 指 令 值
•27
◆ 将Vs分解d轴分量和q轴分量
则 Vid Vi cos Vs xIq RId Viq Vi sin xId RIq
若忽略电阻R
Vid Vi cos Vs xIq
•28
无功电流
PWM控制电路的基本构成及工作原理

图 1 系统总体框图(1)整流滤波模块:对电网输入的交流电进行整流滤波,为变换器提供波纹较小的直流电压。
(2)三相桥式逆变器模块:把直流电压变换成交流电。
其中功率级采用智能型IPM 功率模块,具有电路简单、可靠性高等特点。
(3)LC 滤波模块:滤除干扰和无用信号,使输出信号为标准正弦波。
(4) 控制电路模块:检测输出电压、电流信号后,按照一定的控制算法和控制策略产生 SPWM 控制信号,去控制IPM 开关管的通断从而保持输出电压稳定,同时通过 SPI 接口完成对输入电压信号、电流信号的程控调理。
捕获单元完成对输出信号的测频。
(5) 电压、电流检测模块:根据要求,需要实时检测线电压及相电流的变化,所以需要三路电压检测和三路电流检测电路。
所有的检测信号都经过电压跟随器隔离后由TMS320F28335 的 A/D 通道输入。
基于 DSP 的三相 SPWM 变频电源的设计变频电源作为电源系统的重要组成部分,其性能的优劣直接关系到整个系统的安全和可靠性指标。
现代变频电源以低功 耗、高效率、电路简洁等显著优点而备受青睐。
变频电源的整个电路由交流-直流-交流-滤波等部分构成,输出电压和电流波形均为纯正的正弦波,且频率和幅度在一定范围内可调。
本文实现了基于 TMS320F28335 的变频电源数字控制系统的设计, 通过有效利用 TMS320F28335 丰富的片上硬件资 源,实现了 SPWM 的不规则采样,并采用 PID 算法使系统产生高品质的正弦波,具有运算速度快、精度高、灵活性好、系统扩展能力强等优点。
系统总体介绍根据结构不同,变频电源可分为直接变频电源与间接变频电源两大类。
本文所研究的变频电源采用间接变频结构即 交-直-交变换过程。
首先通过单相全桥整流电路完成交-直变换,然后在 DSP 控制下把直流电源转换成三相 供给后级滤波电路,形成标准的正弦波。
变频系统控制器采用SPWM 波形TI 公司推出的业界首款浮点数字信号控制器TMS320F28335,它具有 150MHz 高速处理能力,具备 32 位浮点处理单元,单指令周期 32 位累加运算,可满足应用对于更快代码 开发与集成高级控制器的浮点处理器性能的要求。
主动式PFC电路

任一网络N 在图标关联参考方向下输入网络的瞬时功率P 等于电压与电流瞬时值 i= 2 U*Cos( 31- © )(©为端口电压与电流的相位差P=丁 pdt = ¥ * 0 " T T0 UI [Cos Cos(2 t )]dt主动式PFC 电路稳定的电源除了能供应系统维持正常的动作外并会影响整个系统的特性 ,当负载具 高电容性或电感性,或者电流波形非弦波时,功率因子远低于1,致使部分功率反馈回 电力的传输在线,因而会增加传输线的负荷与谐波之干扰.再加上当今能源缺乏须节约 能源的趋势下,设计生产高效率的电源减少干扰和能源浪费成为众所追求的目标,为了 达到这个目标必须提高电源的功率因子(Power Factor,简称PF). PFC 即功率因子校正 (Power Factor Correction),其作用就是为了提高功率因子.LITEON 生产的电源产品主要 为开关电源(Switching Power Supply,简称SPS),本文将针对SPS 的主动式PFC(Active Power Factor Correction,简称 APFC)电路进行探讨..PF 的相关知识1. 正弦电路的功率因子的乘积,即: p=u*i设正弦电压和电流分别为:u= .2 U*Cos 31贝U 有 p=u*I= . 2 U*Cos 31* 2 U* Cos( 3 t-© )=U*I*[Cos © +Cos(2w t- © )] 可见瞬时功率是由恒定分量UICos ©和正弦分量两部分组成,正弦分量的频率是电压频 率的两倍•其中感性网络中© >0,容性网络中© <0.此时电压和电流的波形如图•由图 可见在每一个周期内有两段时间内 u 和I 的实际方向相反,此时p<0,即网络内部储能组 件把储存的电磁能量返回电源的缘故•瞬时功率的实际意义不大,通常用平均功率P(又称有功功率)来反映网络实际吸收 的功率•根据定义:=U*I*Cos ©Cos©称为电路的功率因子,©功率因子角(也就是阻抗角),当电流与电压的参考方向相同时,UICos©表示吸收功率.1= I I 2 I2电路的功率因子直接影响发电设备的利用率,如一额定电压U N=1000V,额定电流|N=100A的发电机,在负载功率因子为0.5时只能发出1000*100*0.5=50KW.只有当负载的功率因子为1时,才能发出100KW的功率.另一方面当输送相同的功率时,功率因子低, 则电流就大,流过线路时,损耗也就增大.2. AC-DC电路的输入电流谐波分量和功率因子在AC-DC开关电源的输入端,AC电源经全波整流后,一般接一个大电容,如图,以得到波形比较平直的直流电压.整流器一电容滤波电路是一种非线性组件和储能组件的组合.因此,虽然输入正弦交流电压,但电流波形却严重畸变,呈脉冲状,如图.由此可见,大量应用整流电路,会使电网供给严重畸变的非正弦电流,造成的严重后果是:谐波电流对电网有严重的危害,并且输入端功率因子下降.脉冲状的输入电流,含有大量谐波,一方面使谐波躁音水平提高,同时在AC -DC 整流电流的输入端必需增加滤波器.对上图的电流波形,可用傅里叶级数展开,得到各次谐波分量的百分比,总的谐波电流分量(或称总谐波畸变Total Harmonic Distortion用THD表示.大量的电流谐波分量倒流入电网(称为Harm on ic Emissio n),造成对电网的谐波”污染” 一方面产生”二次效应”即电流流过线路阻抗造成谐波电压降,反过来使电网电压(原来是正弦波)也产生畸变;另一方面,会造成电路故障,使变电设备损坏上面讲到正弦电路的功率因子用Cos©表示.由于整流电路中二极管的非线性,尽管输入电压为正弦,电流却为严重非正弦,因此正弦电路的功率因子计算不再适用于AC-DC变流电路,后续用PF(Power Factor)表示功率因子.定义:PF二有功功率/伏安=P/(U*I)设AC-DC变流的输入电压(有效值U)为正弦,输入电流为非正弦,其有效值为:式中,片、I 2、…I n、…分别为电流的基波分量、二次谐波、…n次谐波的有效值.设基波电流落后V i相位差为©,则有功功率和功率因子可表示为P=U*I 1*Cos©PF=U*l1*Cos© /VI= I1 *Cos © /I式中|l/l=|l/「li l2 ... In ... 为基波电流相对值,称为畸变因子(Distortion Factor), Cos© 称为位移因子(Displacement Factor).定义总谐波畸变THD= l h/l;=. (I;—…―I:—…)/];贝U PF= Cos© / J THD23. 提高AC-DC电路输入端功率因子和减小电流谐波的主要方法a. 无源滤波器这一方案是电路的整流器和电容之间串联一个滤波电感,或在交流侧接入谐振滤波器.其主要优点是:简单、成本低、可靠性、EMI小.主要缺点是:尺寸和重量大,难以得到高功率因子(一般可提高到0.9左右),工作性能与频率、负载变化及输入电压变化有关,电感和电容间有大的充放电电流等.b. 有源滤波器(或称主动式功率因子校正器)在整流器和负载之间接入一个DC-DC开关变换器,应用电流反馈技术,使输入端电流波形跟踪交流输入正弦电压波形,可以使电流接近正弦.从而是输入端THD小于5%, 而功率因子可提高到0.99甚至更高.此种方案即主动式PFC(Active Power Factor Correction),简称APFC.它的主要优点是:可得到较高的功率因子;THD小;可在较宽的输入电压范围和宽带带下工作;体积和重量小;输出电压可保持恒定.主要缺点是:电路复杂;MTBF下降;成本高;EMI高;效率会有所下降.二.Boost功率因子校正器(Boost-APFC)的工作原理1. APFC的基本原理.从原理上讲,任何一种DC-DC变换器拓朴都可以用作APFC的主电路.但是,由于Boost 变换器的特殊优点,应用于APFC更为广泛.下面以Boost-APFC为例,说明APFC 电路的基本工作原理.下图为Boost-APFC电路的原理图.主电路有单相桥式整流器和DC-DC Boost变换器组成,虚线框内为控制电路,包括:电压误差放大器VA及基准电压Vr,电流误差放大器CA,乘法器M,脉宽调制器(图中未给出)和驱动器等,负载可以是一个开关电源.PFC工作原理如下:主电路的输出电压Vo和基准电压Vr比较后,输入给电压误差放大器VA,整流电压Vdc检测值和VA的输出电压信号共同加到乘法器M的输入端,乘法器M的输出则作为电流反馈控制的基准信号,与开关电流i s检测值比较后,经过电流误差放大器CA加到PWM及驱动器,以控制开关Tr的通断,从而使输入电流(即电感电流)i L的波形与整流电压Vdc的波形基本一致,是电流谐波大为减少,提高了输入端功率因子,由于功率因子校正器同时保持输出电压恒定,使下一级开关电源设计更容易•上图中给出输入电压波形Vdc、Vi和经过校正的输入电流i L、%波形,输入电流PWM频率调制,使原来呈脉冲状的波形,调制成接近正弦(含有高频纹波)的波形.在一个开关周期内,具有高频纹波的输入电流,取每个开关周期的平均值,则可得到较为光滑的近似正弦波.2. APFC的控制方法常用的控制AC-DC开关变换器实现APFC的方法基本上有三种,即电流峰值控制电流滞环控制,以及平均电流控制•区别如下表:由于平均电流控制较电流峰值控制,电流滞环控制性能优越,且目前主流PFC控制IC大多使用平均电流控制模式,如UC3845、ML4824等,故在此仅讨论平均电流模式如图,为平均电流控制的Boost-APFC电路的原理图,其主要特点是使用电流误差放大器(或动态补偿器)CA.訥律说沬柠斜的瓯观坷辛曾亦桩卫建踣傑理層其工作原理如下:电流误差放大器的电流基准值由乘法器输出Z供给,Z=XY.乘法器有两组输入,一个为X,是输出电压Vo/H与基准电压Vref之间的误差(经过电压误差放大器VA)信号,另一个输入丫为电压Vdc检测值Vdc/K, Vdc为输入正弦电压Vi的全波整一 d ■V wnnuT ! <>-^1 I流值,因此电流基准为双半波正弦电压.电感电流i L 被直接检测,与基准电压比较后 其高频分量的变化通过电流误差放大器,被平均化处理.放大后的平均电流误差与锯齿 波斜坡相比较后,给开关Tr 以PWM 信号并控制Tr 的占空比D(Duty Cycle).于是电流 误差被迅速而精确的校正•三.APFC 集成控制电路的工作原理简介为便于研制和生产主动式有源功率因子校正器,现在APFC 的控制电路已经集成化. 有多种APFC 集成控制电路芯片可供选用.这里以Micro Liner 公司生产的ML4824芯片 为例,说明APFC 集成控制电路基本组成和应用.ML4824是一颗集成PFC 和PWM 控制的芯片,其PFC 部分具有平均电流模式控制; 恒频控制等特点•1. ML4824的内部结构框图及端子功能说明下图为ML4824的内部结构框图.由图可见,ML4824包括电流放大器IEA ,模拟平 方/乘法/除法器(Gain Modulator,以下简称GM),震荡器,功率MOS 管的门极驱动器, 7.5V 基准电压,以及软启动,过流/过压保护等.模拟平方/乘法/除法器GM 如下图:GM 的输入由三部份组成:1) Iac:提供一个正弦电压的相位参考,它与Im 成正比; 2) Irms:输入电压的均方根,其平方值与Im 成反比;CraCULLAiiOK 1.5V闭HI H g 0U1 叩 «&llTITpw wr I―加问msgf 丄3) Veao: PFC输出反馈值与基准电压2.5V经VEA比较放大后的输出,同时外接RC 网络(网络的另一端接GND),用来作电压回路的补偿;Im与lac、Irms和Veao的关系为:2lm=K*lac*(Veao-Vx)/ Vrms式中K为比例常数,从Veao中减去Vx是芯片设计的要求,一般为1.5V. lac与Vrms为电压前馈(Feedforward)的作用,使输入电压变化时输入功率稳定.例如设Veao不变而输入电压增加一倍,lac和Vrms也增加一倍,则Vrms2为四倍,可得Im将减半,结果输入功率不变.Im输出电流信号大小,成为了控制PFC开关on-off时间的重要因素.Im的输出电流经由电流误差放大器IEA所产生的信号和一三角波(由Ramp1之外接电路RC而来) 比较,以控制PFC开关之on-off之时间.ML4824其内部分为两大部分,即前端之功率因子修正(PFC)部分,与后端波宽调变(PWM)之部分,其PFC之动作时机采leading edge,而PWM则为trailing edge.Traili ng edgeML4824由16个端子(Pin),依次(按序号)为:1) .leao: PFC IEA的输入端,同时外接RC网络(网络的另一端接Vref参考电压),用来作电流回路的补偿;2) .lac;V3) .lsense:电流Sense信号的输入,以限制PFC电路的总电流.一般接一Sense电阻, 当电流流过此电阻时,在Rsense上产生一压降.同时给Isense提供一负电压.电流越大则负电压绝对值越大,当低于-1V时即|Isense|>1时,PFC Ilimit将动作,将PFC out讯号拉低,以作PFC Ilimt保护;4) .Vrms;5) .SS:软启动(Soft Start),要求外接一电容Css,当其被充电至8V时,PWM开始动作,其Delay时间可由T=Css*1.25V/50uA估算出来,如当Css=1uF时,T为25mS;6) .Vdc: PWM电压的反馈输入;7) .Ramp1:外接RtCt用以设定PFC电路的开关频率.公式为f=1/[0.51(Rt+961Ct)Ct], ML4824-2的PWM的开关频率为PFC的两倍,而ML4824-1的两不部分频率相等;8) .Ramp2:当其工作在电压模式时,作为PWM输入(即PFC的输出)的前馈.当PFC 电压低时增大PWM的输出占空比(Duty cycle).工作在电流模式时作为电流Sense输入;9) .DC Ilimit: PWM 电流的Sense, 一般用来检测PWM MOS的电流.当其超过1V时, 会拉低PWM的输出;10).GND:接地端.所有电压的量测以之为准;11).PWM out: PWM的驱动输出;12).PFC out: PFC out的驱动输出;13).Vcc: IC的供电电压端;14).Vref:基准电压端,产生7.5V输出;15).Vfb: PFC输出电压的检测端,接VEA的负端,用来与2.5V基准电压比较得到Veao,另外其在电路还有两种功能,当其大于2.7V时,OVP将动作,将PFC out讯号拉低, 以作PFC过压保护,开机时,当其小于2.5V时,迟滞比较器Vin OK将PWM out讯号拉低以作PWM Soft Star欠压保护(当正常工作后因Vin OK为迟滞比较器,故Vfb即使低于2.5V,其PWM也可正常工作);16).Veao.一般说来,当交流电经EMI与桥式整流后,其电压电流尚未经过内部烦杂的电子电路时,其所受之noise干扰最小,故ML4824之GM所取的电压及电流会从此端取得.2. ML4824 PFC逻辑及保护电路部分说明:(见ML4824的内部结构框图)if PFC输出为1 (正常)=> 1234为0; if 1.为0 => S为0 => 56为0,当Vfb过高(高于2.7V 时),OVP output 为1,即5.为1; if 5.为1 => PFC 为0;当Isense过低(低于-1V 时), PFC limit output 为1,即6.为1, if 6.为1 => PFC 为0; if PFC 输出为1 (正常)=> 1.2.3.4. 为0; if 2.为0 => R为1,即7•为1 => 8为0;应为9.(水平讯号)与10.(三角波讯号)为比较器+端与-端之输入,if 8.为0 => 10.>9.时动作,此即前所述PFC之leading edge.3. ML4824应用范例LITEON的File Server及Work Station机种中所使用的APFC芯片一般为ML4824 和ML4800两种,ML4800与ML4824功能与原理大致相同.而在ML-4824中选用的都是ML4824-1型,即PFC与PWM部分开关频率相等.下面就以PS-6191-1为例,说明在具体线路中ML4824-1的应用.PS-6191-1线路是一个典型的APFC电路(见附图).其六组输出共计为190W,输入AC 电压为90~264V,频率为47~63Hz,下面针对此电路来看它的APFC是如何工作的.首先要知道PFC的输出电压,因为Vac最高为264Vac,因PFC电压应大于其峰值为264* 2 =372V,选择380V作为PFC正常输出电压值.Iac和Vrms均在整流器BD050后获取,以减小其noise干扰.Iac通过R200, R201, R202侦测输入电压的相位.Vrms通过R203, R204, R205相加与R206分压去测量输入电压RMS 值.Vfb通过R222, R223, R224相加与R211分压去侦测PFC输出电压的值,与2.5V通过电压误差放大器VEA比较放大后得到Veao.同时考虑到电压回路的补偿,Veao须外接RC网络.Veao, Vrms和lac通过乘法/除法/平方器运算后输出电流Im,此电流值可以快速的反应输入电压和输出电压的变化.Im通过电流误差放大器IEA放大后得到Ieao.同样因为也要考虑到电流回路的补偿,故Ieao也要外接RC网络.Ieao与震荡器产生的锯齿波通过比较器比较得到一占空比随Veao Vrms和Iac变化而变化的方波信号,此方波信号再通过其它一些逻辑线路来控制PFC驱动的占空比,以达到功率因子校正的目的,在设计时可以通过改变ML4824第七脚Ramp1的Rt (R217)和Ct (C111)的值得到不同频率和不同坡度的锯齿波.。
FAN7527-用于APFC单级反激式LED驱动电源设计(130W)
以FAN7527B为核心的PFC单级反激式LED驱动电源设计(130W)/ 来源:元器件交易网日期:2011年09月23日文中分析并设计了一种单级功率因数校正LED驱动电源。
该电源采用反激式拓扑实现了功率因数校正和对LED灯的恒流驱动。
与普通反激式电源相比,该电源采用单级反激式PFC结构简化了电路结构,具有更高的功率因数和效率。
文中对电路工作原理做了详细的说明,给出了变压器的设计方法。
实验结果表明,该电源功率因数高、损耗小、输出稳定,可以高效率驱动LED灯。
在能源危机和气候变暖问题越来越严重的今天,节能与环保已成为社会焦点议题。
LED因其高效、节能、环保、寿命长、色彩丰富、体积小、耐闪烁、可靠性高、调控方便等诸多优点等特点受到人们的广泛关注,被认为是21世纪最有前途的照明光源。
传统的白炽灯效率低、耗电高;荧光灯省电,但使用寿命短、易碎,废弃物存在汞污染;高强度气体放电灯存在效率低、耗电高、寿命短、电磁辐射危害等缺点;若能以LED照明取代目前的低效率、高耗能的传统照明,无疑能缓解当前越来越紧迫的能源短缺和环境恶化问题。
由于LED自身的伏安特性及温度特性,使得LED对电流的敏感度要高于对电压的敏感度,故不能由传统的电源直接给LED供电。
因此,要用LED作照明光源首先就要解决电源驱动的问题。
传统的LED驱动电源虽然可以实现LED亮度调节,但是不能实现功率因数校正,输入功率因数比较低,谐波比较大。
为了使LED驱动电源的输入电流谐波满足要求,必须加功率因数校正。
本文介绍一种单级PFC反激式LED电源,该电源所用器件少,损耗低,具有较高的的功率因数和效率。
1 电路原理分析图1为电路简图。
电路采取单级反激式拓扑,由全波整流,DC/DC变换,输出整流滤波电路,误差反馈电路,PWM控制器电路构成。
FAN7527B是飞兆半导体公司推出的有源功率因数校正控制芯片。
该芯片内部乘法器电路的优异性能,可以用于宽交流市电输入电压范围的应用场合(85~265VAC)。
主动式PFC电路

为便于研制和生产主动式有源功率因子校正器,现在APFC的控制电路已经集成化.有多种APFC集成控制电路芯片可供选用.这里以Micro Liner公司生产的ML4824芯片为例,说明APFC集成控制电路基本组成和应用.
ML4824是一颗集成PFC和PWM控制的芯片,其PFC部分具有平均电流模式控制;恒频控制等特点.
b.有源滤波器(或称主动式功率因子校正器)
在整流器和负载之间接入一个DC-DC开关变换器,应用电流反馈技术,使输入端电流波形跟踪交流输入正弦电压波形,可以使电流接近正弦.从而是输入端THD小于5%,而功率因子可提高到0.99甚至更高.此种方案即主动式PFC(Active Power Factor Correction),简称APFC.
4).Vrms;
5).SS:软启动(Soft Start),要求外接一电容Css,ay时间可由T=Css*1.25V/50uA估算出来,如当Css=1uF时, T为25mS;
6).Vdc: PWM电压的反馈输入;
7).Ramp1:外接RtCt用以设定PFC电路的开关频率.公式为f=1/[0.51(Rt+961Ct)Ct], ML4824-2的PWM的开关频率为PFC的两倍,而ML4824-1的两不部分频率相等;
1).Ieao: PFC IEA的输入端,同时外接RC网络(网络的另一端接Vref参考电压),用来作电流回路的补偿;
2).Iac;
3).Isense:电流Sense信号的输入,以限制PFC电路的总电流.一般接一Sense电阻,当电流流过此电阻时,在Rsense上产生一压降.同时给Isense提供一负电压.电流越大则负电压绝对值越大,当低于-1V时即|Isense|>1时, PFC Ilimit将动作,将PFC out讯号拉低,以作PFC Ilimt保护;
电力电子技术课程设计--基于Boost电路APFC原理及设计
(1)APFC电路原理图
(2)APFC电路工作原理
➢ 单相交流电经过整流后得到单相双半波正弦 电压信号,此电压波形作为功率因数校正控制器 的输入电流的参考波形,输入到模拟乘法器,为 了保证输出电压恒定,将输出电压通过电压反馈 网络也引入乘法器,经过乘法器运算后,其结果 作为电流波形的参考值,并与实际取样的电流值 进行比较,然后通过驱动电路产生的驱动信号, 控制DC/DC变换器的输出电流和电压。
一般地,开关频率远高于输入交流的频率,因此可 以近似认为交流输入电压峰值为常数,在一个开关周 期内输入电压保持不变,因而乘法器的输出信号恒定, 即电流放大器的输入基准电流恒定。当Boost转换器随 输入电压波形进行功率因数校正时,相当于参考电流 的实时正弦变化,乘法器的输出也随之而变。下图是 SPWM控制时的电感电流波形图,图中实线为实际电 感电流,虚线为平均电流。
电力电子技术课程设计
J电气工程及其自动化
设计要求
➢ 根据给定指标,设计BOOST电路参数 ➢ 掌握APFC工作原理及控制系统设计 ➢ 利用PSIM软件,建立仿真系统模型 ➢ 仿真实验,观察重要器件波形及参数 ➢ 撰写课程设计报告
基于Boost电路APFC原理及设计
1、电路工作条件: • 输入电压:190-240V/50Hz交流电 • 输出电压:400V • 器件工作频率:20kHz • 额定功率:1kW • 峰值功率:1.5kW • 负载:电阻
从下图可以发现,电流跟踪控制电路中的开关 管的开关周期是不断变化的,所以导致了电感电 流的变化率也在一直变换中,同时整个电路的工 作频率不是恒定的。电流跟踪控制电路具有电流 反馈环,可以实时地对电路中电流和信号进行调 节。但是这种控制电路开关频率受到负载的影响 比较大,滞环宽度对整体性能造成很大的干扰。
基于APFC的单相PWM整流器的设计——毕业论文
武汉理工大学毕业设计(论文)基于APFC的单相PWM整流器的设计学院(系):自动化学院专业班级:电气学生姓名:XXXXXXXX指导教师:XXXXXXX摘要 (I)第1章绪论 (1)概述 (1)本课题研究的意义 (2)整流技术的发展 (3)本论文主要工作 (4)第2章 PWM控制技术 (5)PWM简介 (5)PWM控制原理和应用 (5)PWM控制的基本原理 (5)PWM计算法和调制法 (7)第3章功率因素校正技术 (10)发展历史 (10)Boost PFC电路与Buck电路的对偶性 (11)PFC技术分类及研究方向 (13)PFC技术分类 (14)基本的两种功率因素校正技术 (16)第4章有源功率因素校正(APFC)技术 (19)功率因数(PF)的定义 (19)功率因数校正 (19)功率因数校正实现方法 (20)有源功率因数校正方法分类 (20)功率因数校正技术的发展趋势 (25)第5章 MATLAB仿真实验 (27)电路的工作原理 (27)Matlab仿真 (29)仿真图 (29)第6章结论与展望 (32)结论 (32)基于滞环比较法控制系统的研究 (32)基于功率因素校正技术的研究 (32)展望 (32)参考文献 (34)致谢 (35)摘要分析单相电压型PWM整流电路(功率因素校正电路)的工作原理和工作模式, 功率因数校正(PFC)技术诞生与20世纪80年代,它采用的是高频开关工作方式,具有体积小,重量轻,效率高,输入功率因素(PF)接近1的优点,采用 PWM 进行控制,其中控制方法采用的是电流滞环比较法,因硬件电路简单,属于实时控制,电流响应快,对负载的适应性强,由于不需要载波,所以输出电压不含特定频率的谐波分量,另外,这种控制方式,有利于提高电压利用率选择适当的工作模式和工作时序,可使PWM整流电路的输出直流电压得到有效的稳定值。
同时也调节了交流侧电流的大小和相位,实现能量在交流侧和直流侧的双向流动,并使变流装置获得良好的功率因数。
CCM模式APFC电路设计

CCM模式APFC电路设计传统的工频交流整流电路,因为整流桥后面有一个大的电解电容来稳定输出电压,所以使电网的电流波形变成了尖脉冲,滤波电容越大,输入电流的脉宽就越窄,峰值越高,有效值就越大。
这种畸变的电流波形会导致一些问题,比如无功功率增加、电网谐波超标造成干扰等。
功率因数校正电路的目的,就是使电源的输入电流波形按照输入电压的变化成比例的变化。
使电源的工作特性就像一个电阻一样,而不在是容性的。
目前在功率因数校正电路中,最常用的就是由BOOST变换器构成的主电路。
而按照输入电流的连续与否,又分为DCM、CRM、CCM模式。
DCM模式,因为控制简单,但输入电流不连续,峰值较高,所以常用在小功率场合。
CCM模式则相反,输入电流连续,电流纹波小,适合于大功率场合应用。
介于DCM和CCM之间的CRM称为电流临界连续模式,这种模式通常采用变频率的控制方式,采集升压电感的电流过零信号,当电流过零了,才开通MOS管。
这种类型的控制方式,在小功率PFC电路中非常常见。
今天我们主要谈适合大功率场合的CCM模式的功率因数校正电路的设计。
要设计一个功率因数校正电路,首先我们要给出我们的一些设计指标,我们按照一个输出500W左右的APFC电路来举例:已知参数:交流电源的频率fac——50Hz最低交流电压有效值Umin——85Vac最高交流电压有效值Umax——265Vac输出直流电压Udc——400VDC输出功率Pout——600W最差状况下满载效率η——92%开关频率fs——65KHz输出电压纹波峰峰值Voutp-p——10V那么我们可以进行如下计算:1,输出电流Iout=Pout/Udc=600/400=1.5A2,最大输入功率Pin=Pout/η=600/0.92=652W3,输入电流最大有效值Iinrmsmax=Pin/Umin=652/85=7.67A4,那么输入电流有效值峰值为Iinrmsmax*1.414=10.85A5,高频纹波电流取输入电流峰值的20%,那么Ihf=0.2*Iinrmsmax=0.2*10.85=2.17A6,那么输入电感电流最大峰值为:ILpk=Iinrmsmax+0.5*Ihf=10.85+0.5*2.17=11.94A7,那么升压电感最小值为Lmin=(0.25*Uout)/(Ihf*fs)=(0.25*400)/(2.17*65KHz)=709uH8,输出电容最小值为:Cmin=Iout/(3.14*2*fac*Voutp-p)=1.5/(3.14*2*50*10)=477.7uF,实际电路中还要考虑hold up时间,所以电容容量可能需要重新按照hold up的时间要求来重新计算。
PWM功率放大电路

P W M功率放大电路(总5页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除PWM功率放大电路——卢浩天LC梦创电子制作工作室一、PWM功率放大原理PWM功放电路有单极性和双极性之分。
双极性指在一个PWM周期内,电机电枢电压正、负极性改变一次;单极性指PWM功放管工作时,有一个PWM信号端和一个方向控制端,在电机正转或反转时,仅有对应的一对功放管通电,而另一对功放管截止。
因此,电机电枢在正转或反转时,正、负极性是固定的,即是单极性的。
若忽略晶体管的管压降,可以认为PWM功率放大管的输出电平等于电源电压,即|U|=C U。
图1描绘了电枢的电压波形和电流波AB形。
在图中,T为PWM脉冲周期,T为正脉冲宽度,h T为负脉冲宽P度。
电枢两端的电流是一个脉动的连续电流,从图可看出,电枢两端的电流是一个脉动的连续电流,加快PWM的切换频率,电流的脉动就变小,结果近似于直流信号的效果,使电机均匀旋转。
同时,如果改变PWM的脉冲的宽度,电枢中的平均电流也将变化,电机的转速便将随之改变,这就是PWM调速的原理。
在图中,PWM 脉冲频率决定了电枢电流的连续性,从而也决定了电机运行的平稳性。
如果脉冲频率切换频率选择不当,电机的低速性能有可能不理想,容易烧坏晶体管,而且由于电流不连续,电机有可能产生剧烈震荡,甚至出现啸叫现象,这些都是不允许的。
因此,在设计PWM 功率放大器时,要慎重选择切换频率。
为了克服静摩擦,改善运行特性,切换频率应能使电机轴产生微振,即: 式中,T K 为转矩系数,Φ=M T C K (M C 为电机电磁常数、Φ为励磁磁通),C U 为功放电源,A L 为电枢电感,S T 为电机静摩擦力矩。
另外,选择切换频率具体还应考虑以下几个方面:(1)微振的最大角位移应小于允许的位置误差。
在伺服系统中,假设要求位置误差小于δ,则要求切换频率满足下式: 式中,J 为电机及负载的转动惯量。