油泵凸轮轴加工自动线机械手设计
凸轮轴加工自动线机械手

设计说明书课题:凸轮轴加工自动线机械手班级:设计:审核:二00五年九月目录一、目录 (2)二、前言 (3)(一)机械手的用途说明 (3)(二)设计机械手的目的、意义 (3)(三)设计指导思想应达到的技术性能要求 (4)三、设计方案论证 (5)(一)机械手的原始依据 (5)(二)机械手的运动方案论证 (6)四、机械手各组成部件设计计算 (8)(一)抓取机械设计 (8)(二)手腕机构 (12)(三)手臂设计 (14)(四)缓冲装置设计 (22)(五)定位机构设计 (25)(六)机械手驱动系统设计 (25)五、机械手控制系统设计 (25)六、设计总结 (26)七、参考文献 (27)二、前言(一)机械手的用途说明机械手是模仿人手工作的机械设备。
实验用机械手的设计,是指机械手臂在一定范围内的摆动,手臂的垂直方向的上下移动及手爪的伸缩运动组成。
由启动系统实现各运动的驱动。
它的主要作用是将工件按预定的程序自动地搬运到需要的位置,或者保持工具进行工作。
机械手是利用PLC控制整个系统实现各种运动的自动化控制,且能用于教学演示。
(二)机械手的目的、意义机械手是模仿人手的动作,生产中应用机械手可以提高自动化水平和劳动生产率,可以减轻劳动强度,保证产品质量,实现安全生产,尤其在恶劣的劳动条件下,它代替人作业的意义更加重大。
因此,在机械加工中得到越来越广泛的应用。
目的是,我们对机械手的设计步骤有一定的平衡了解;也能基本掌握机械设计的方法;综合运用学过的理论知识;全面复习绘图技巧,并较好的运用于毕业设计绘图上。
通过这次设计,使我了解到,自动控制的对象主要是单机或某个生产过程,智能控制则包括控制对象及整个工作环境或整个生产过程;自动控制的目标是使在系统控制的某个状态下,尽量消除环境对系统的影响,智能控制关心的使最终状态或现行状态是否合乎要求。
因此,要充分考虑环境的影响;自动控制的学习来源重要是对象的状态的反馈,所以智能控制需要一个庞大的数据库;自动控制理论着重描述对象的数学模型,然后,通过各种控制算法进行控制,以达到目的,智能控制着重直接控制经验。
直动型弧面凸轮机械手的设计
引言间歇传动是自动机械和半自动机械中常用的机械传动方式之一,其作用是使设备中某些构件产生周期性的运动和停歇。
常见的机构如棘轮机构、槽轮机构等均存在着诸如振动、冲击严重;动载荷大、磨损剧烈;定位精度低等缺陷,从而大大限制了其发展和使用。
近年来,随着CAD/CAM的发展,在凸轮的设计、制造中提供了良好的帮助。
在数控机床上人们用包络原理可较容易的加工出无理论误差的凸轮轮廓面。
从而使凸轮机构广泛用于多种场合。
在美国、日本等国,间歇凸轮机构已形成了众多系列化产品,用户可很方便地根据自己需要选购合适的凸轮装置。
其中美国CAMCO、日本三兴线材工业株式会社品种较齐全。
在我国,凸轮间歇装置虽未形成工业化、系列化产品,但也有一些单位进行了长期的研究开发工作。
有些已具备了设计制造各种凸轮间歇装置的能力。
且对于弧面凸轮间歇摆动驱动装置类型的产品,在国内尚未出现或尚未得到广泛应用。
它的研究、设计、开发、推广可广泛应用于冲模送料及其他自动机械生产线中,具有广泛的推广应用前景。
第一章绪论1.1课题的背景及意义当前机械产品正沿着两个方向发展,一是大型化、自动化、成型化;二是小型化、多功能、结构简单、使用可靠。
在此发展过程中,各种各样的自动机械占有令人注目的地位。
近年来,随着社会的发展,机械与自动控制技术结合已成为现代机械制造生产系统中一个重要组成部分。
它的发展很快融和了当今先进的自控技术、信息处理技术、先进制造技术等新兴技术,逐渐形成了一门新的科学。
通过前些天参观中国西部国际装配制造业博览会,对此也感受颇深。
尽管此自动机械手发展很快,但仍不能取代纯机械的机械手,因为后者在可靠性尤其是价格方面都具有十分突出的优越性。
弧面凸轮机械手作为一种新型机械手,具有结构紧凑、可靠性好、成本低、精度高的特点,在现代场合仍具有十分重要的地位。
弧面凸轮机械手可以代替工人机械而繁重的劳动,是一种高效的自动化生产设备。
在国外,特别是美国、日本已有其定型产品。
凸轮轴磨床上下料机械手设计毕业论文
凸轮轴磨床上下料机械手设计毕业论文目录摘要 (1)A BSTRACT (II)1 绪论 (1)1.1机械手简介及其应用 (1)2 凸轮轴磨床上下料机械手的总体设计 (4)2.1机械手的组成及各部分关系概述 (4)2.1.1执行机构 (4)2.1.2驱动机构 (5)2.1.3控制系统 (6)2.2总体方案拟定 (6)2.3凸轮轴上下料机械手的主要技术参数 (7)3 凸轮轴磨床上下料机械手机械系统设计 (9)3.1手部 (9)3.1.1手部结构设计 (9)3.2腕部 (13)3.3臂部 (14)3.1.1手臂伸缩缸的结构设计 (14)3.1.2手臂伸缩缸的设计计算 (14)3.2.1 手臂回转缸结构设计 (19)3.2.2手臂回转力矩的计算 (21)3.2.3手臂回转缸的设计计算 (22)4 凸轮轴磨床上下料机械手的液压驱动系统设计 (25)4.1程序控制机械手的液压系统 (25)4.2液压系统传动方案的确定 (26)4.2.1各液压缸的换向回路 (26)4.2.2调速方案 (26)4.2.3减速缓冲回路 (27)4.2.4液压系统的合成和完善 (28)5 凸轮轴磨床上下料机械手的PLC控制设计 (30)5.1输入输出接口端子分配图 (30)5.2状态流程图 (31)图5-2 (32)5.3控制面板图 (32)5.4控制梯形图 (32)结束语 (36)致谢 (37)参考文献 (38)1 绪论机械手是近几十年发展起来的一种高科技自动化生产设备,是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
工业机械手的发展离不开工业自动化的需要和发展。
工业机械手作业与周围环境有很强的交互作用,这与数控机床之类的设备有明显的不同。
机电一体化是以电子技术特别是微电子技术为主导的多种新兴技术与机械技术交叉、融合而成的一中综合性的高技术。
液压传动自动上料机械手结构设计

液压传动自动上料机械手结构设计液压传动自动上料机械手是一种用于工业生产线的自动化机器人,用于将原材料或零件从一个位置移动到另一个位置。
液压传动自动上料机械手具有强大的承载能力、高速运动和高精度定位的优点,适用于重型工件的搬运和装配。
下面将分析液压传动自动上料机械手的结构设计。
1.机械手的框架结构:2.液压系统:液压传动是液压传动自动上料机械手的核心部分。
液压系统由液压泵、液压缸、液压阀门等组成。
通过液压泵提供的压力,液压缸可以实现各种动作,例如伸缩、旋转、举升等。
液压阀门控制液压传动系统的流量和压力,实现机械手的各种动作和操作。
3.机械手臂的设计:机械手臂是液压传动自动上料机械手的关键组成部分。
机械手臂通常由多个关节连接而成,可以实现多自由度的运动。
机械手臂的关节通过液压缸驱动,使机械手能够完成各种复杂的动作和任务。
机械手臂材质需要具有足够的强度和刚度,同时要求尽量轻量化,以减少能量消耗和摩擦损失。
4.末端执行器的设计:末端执行器是液压传动自动上料机械手的末端装置,用于抓取、搬运或装配工件。
末端执行器通常由夹具、卡盘或吸盘等组成,具有可调节的抓取力和灵活的动作。
末端执行器需要与机械手臂的关节连接,同时能够快速、稳定地完成工件的抓取和释放。
5.控制系统:液压传动自动上料机械手的控制系统由电气控制和液压控制两部分组成。
电气控制系统包含传感器、电机、编码器和控制器等,用于实时监测和控制机械手的运动和状态。
液压控制系统包含液压泵、液压缸、液压阀门等,用于控制机械手的动作和操作。
综上所述,液压传动自动上料机械手的结构设计涉及框架结构、液压系统、机械手臂、末端执行器和控制系统等多个方面。
合理的结构设计可以提高机械手的稳定性、精度和可靠性,从而提高生产效率和产品质量。
机电工程系电气自动化机械手PLC控制系统设计
机械手PLC控制系统设计机械手在专用及自动生产线上应用的十分广泛,主要用于搬动或装卸零件的重复动作,以实现生产自动化。
本设计中的机械手采用关节式结构。
各动作由液压驱动,并由电磁阀控制。
动作顺序及各动作时间的间隔采用按时间原则。
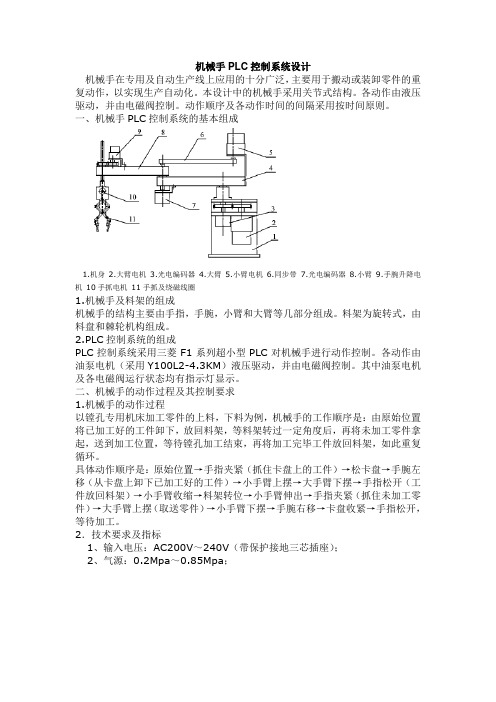
一、机械手PLC控制系统的基本组成1.机身2.大臂电机3.光电编码器4.大臂5.小臂电机6.同步带7.光电编码器8.小臂9.手腕升降电机10手抓电机11手抓及绕磁线圈1.机械手及料架的组成机械手的结构主要由手指,手腕,小臂和大臂等几部分组成。
料架为旋转式,由料盘和棘轮机构组成。
2.PLC控制系统的组成PLC控制系统采用三菱F1系列超小型PLC对机械手进行动作控制。
各动作由油泵电机(采用Y100L2-4.3KM)液压驱动,并由电磁阀控制。
其中油泵电机及各电磁阀运行状态均有指示灯显示。
二、机械手的动作过程及其控制要求1.机械手的动作过程以镗孔专用机床加工零件的上料,下料为例,机械手的工作顺序是:由原始位置将已加工好的工件卸下,放回料架,等料架转过一定角度后,再将未加工零件拿起,送到加工位置,等待镗孔加工结束,再将加工完毕工件放回料架,如此重复循环。
具体动作顺序是:原始位置→手指夹紧(抓住卡盘上的工件)→松卡盘→手腕左移(从卡盘上卸下已加工好的工件)→小手臂上摆→大手臂下摆→手指松开(工件放回料架)→小手臂收缩→料架转位→小手臂伸出→手指夹紧(抓住未加工零件)→大手臂上摆(取送零件)→小手臂下摆→手腕右移→卡盘收紧→手指松开,等待加工。
2.技术要求及指标1、输入电压:AC200V~240V(带保护接地三芯插座);2、气源:0.2Mpa~0.85Mpa;3.图中机械手的任务是将传送带A上的物品搬运到传送带B。
为使机械手动作准确,在机械手的极限位置安装了限位开关SQ1、SQ2、SQ3、SQ4、SQ5,对机械手分别进行抓紧、左转、右转、上升、下降动作的限位,并发出动作到位的输入信号。
传送带A上装有光电开关SP,用于检测传送带A上物品是否到位。
汽车零件加工自动线上的多功能机械手的设计(有cad图+文献翻译)
摘要本次设计的多功能机械手用于汽车零件加工自动线上的设计,主要由手爪、手腕、手臂、机身、机座等组成,具备上料、翻转和转位等多种功能,并按该自动线的统一生产节拍和生产纲领完成以上动作。
本机械手机身采用机座式,自动线围绕机座布置,其坐标形式为球坐标式,具有立柱旋转、手臂伸缩、手臂俯仰、腕部转动和腕部摆动4个自由度。
驱动方式为液压驱动,选用双泵,共有整机回转油缸、手臂俯仰油缸、手臂伸缩油缸、手腕摆动油缸、手腕回转油缸、手爪夹紧油缸6个液压缸。
送放机构的液压驱动系统是由液压基本回路组成,包括调压回路,缓冲回路,调速回路,换向回路.锁紧回路,保压回路。
定位采用机械挡块定位,定位精度为0.5~1mm,采用行程控制系统实现点位控制。
关键词:机械手,自动线,液压,设计,点位控制ABSTRACTThe current design of multifunctional mechanical hand used for R175-type diesel organisms automatic processing line, mainly consist of claw, wrists, arms, body, base and so on. With moving the materials, turnover and transfer spaces, and many other functions, the automatic line with the unified production rhythms and production program completed more moves. With the automatic production line rhythms and the production of complete reunification of the above movements, automatic line is around the machine arrange, the coordinates of the ball coordinates of the form, with huge rotary, extendable arm, arm pitch, hitting and hitting back five moves freedom; Driven approach to hydraulic-driven, and the choice of double leaves pumps, the system pressure to 2.5MPa, 5.5KW electrical power for a total of whole sets of rotation tank, arm tilt cylinders, fuel tanks extendable arm, wrist swing tank, wrist rotation tank, claw clip tank six hydraulic oil tank; positioning a piece of machinery turned positioning, positioning accuracy for 0.5~1mm, using control systems to achieve their point spaces control.Key words: Mechanical hand, the ball coordinates, hydraulic, mechanical turned pieces, control point spaces目录1绪论 (1)1.1机械手的概述 (1)1.2机械手的组成与分类 (1)1.2.1机械手的组成 (1)1.3机械手的分类 (2)1.3 机械手的组成 (3)2总体方案分析 (4)2.1总体方案分析 (4)2.2方案的确定 (4)2.3动作原理 (4)2.4 主要技术指标 (5)3手部的设计 (6)3.1手部结构 (6)3.2手爪的计算与分析 (6)3.2.1手爪执行液压缸工作压力计算 (6)3.2.2 手爪的夹持误差分析与计算 (7)4腕部的设计 (8)4.1腕部结构 (8)4.2 腕部回转力矩的计算 (8)5手臂的设计 (11)5.1手臂伸缩液压缸的设计计算 (11)5.1.1手臂作水平伸缩直线运动驱动力的计算 (11)5.1.2手臂垂直升降运动驱动力的计算 (11)5.1.3确定液压缸的结构尺寸 (12)5.1.4液压缸壁厚计算 (12)5.1.5活塞杆的计算 (13)5.1.6液压缸端盖的联接方式与强度计算 (13)5.1.6缸盖螺钉计算 (13)5.1.7缸体螺纹计算 (14)5.2手臂俯仰运动的设计计算 (15)5.2.1手臂俯仰时所需的驱动力矩 (15)5.2.2缸盖联接螺钉计算和动片联接螺钉计算 (16)5.2.3动片联接螺钉的计算 (16)6.机身设计 (18)6.1机身结构的计算 (18)6.2机身设计时应注意的事项 (19)7机械手液压系统的工作原理 (20)7.1液压系统的组成 (20)7.2液压传动系统机械手的特点 (20)7.3油缸泄漏问题与密封装置 (20)7.3.1活塞式油缸的泄漏与密封 (21)7.3.2回转油缸的泄漏与密封 (21)7.4液压系统传动方案的确定 (22)7.4.1各液压缸的换向回路 (22)7.4.2调整方案 (22)7.4.3减速缓冲回路 (22)7.4.4系统安全可靠性 (23)参考文献 (25)致谢 (26)1绪论1.1机械手的概述工业机械手(以下简称机械手)是近代自动控制领域中出现的一项新技术,作为多学科融合的边沿学科,它是当今高技能发展速度最快的领域之一,并已经成为现代机械制造生产系统中的一个重要组成部分。
自动化装配生产线的机械手臂设计与优化

自动化装配生产线的机械手臂设计与优化
对于自动化装配生产线的机械手臂设计与优化,需要考虑以下几个方面:
1. 功能需求:机械手臂需要满足自动化装配生产线的生产要求,例如精度、速度、重复性等。
2. 结构设计:机械手臂的结构要合理,能够保证运动轨迹和力矩平衡。
还需要考虑机械手臂的尺寸大小、重量以及工作场所的限制等。
3. 控制系统:机械手臂需要与控制系统相配合,完成各种动作。
控制系统需要具备良好的编程界面、运动控制系统和合适的传感器控制等。
4. 优化策略:需要根据不同任务的运动规划,进行优化策略的选择。
常见的优化策略包括机器学习、路径规划和遗传算法等。
在设计和优化机械手臂时,需要使用 CAD 设计软件完成机械手臂的结构设计,通过仿真软件对机械手臂的运动轨迹进行分析。
此外,我们还需要对机械手臂的材料、电机、减速器等进行选型,以满足要求。
最后将机械手臂与控制系统相集成,严格测试机械手臂的各项功能,确保自动化装配生产线的安全稳定运行。
机械手指制作方法

机械手指制作方法机械手指是一种用于自动化操作的机械臂设备,其制作方法较为复杂。
下面将分步骤为大家介绍机械手指的制作方法。
1、设计机械手指的结构与单元机械手指的结构与单元设计是机械手指制作的核心,需要综合考虑机械手指的作业环境、载荷数量大小、操作机器人的型号等因素,设计出最合适的结构和单元。
其次还需考虑材质的选择,例如高强度的钛合金、不锈钢等。
设计完成后,可以使用CAD软件进行模型的建立,并进行数值模拟分析,以验证是否符合设计要求。
2、加工机械手指的零部件根据机械手指的设计图纸,台车机、数控铣床、数控车床等器材对机械手指的零部件进行加工。
在加工过程中,需要严格控制加工工艺,确保每一个零部件尺寸精确,表面光洁平整。
3、组装机械手指的零部件将加工好的机械手指零部件进行组装。
此时,需要特别注意零部件的安装顺序和位置、紧固度、固定方式等细节问题。
不符合要求的零部件需进行更换或修正,以确保机械手指的正常运行。
4、电器部分的安装和调试安装和调试机械手指的电气部分,包括电动执行器、伺服电机、传感器、控制器、驱动器等。
在调试过程中,需要测试电气部分的各个功能,确保其与机械部分的配合良好,能够实现精准控制。
5、机械手指的整体调试将电气部分与机械部分进行整体调试,并通过实际操作来验证机械手指的运行情况。
在此过程中,需要模拟机械手指的实际工作环境和使用场景,探测机械手指的故障和改善方案等。
6、机械手指的性能测试和验收对机械手指的各项性能指标进行测试,并进行验收。
测试结果需要符合预设的机械手指性能指标,例如负载承重能力、动态稳定性、运动精度等等。
验收合格的机械手指可以正式投入使用。
以上是机械手指的制作方法的步骤。
在制作过程中,需要严格按照规范进行操作,不仅要注重精度和质量,还要考虑机械手指的整体性能和安全性。
机械类毕业设计题目

139.外行星摆线马达结构设计
140.旋转门的设计
141.液位平衡控制系统实验装置设计
142.J45-6.3型双动拉伸压力机的设计
143.CG2-150型仿型切割机设计
144.CG2-150型仿型切割机设计2
145.X700涡旋式选粉机设计
146.桥式起重机起升机构设计
130.Ф3.2x10m机立窑(总体、窑体、卸料部件)设计
131.面筋成形生产线设计
132.面筋成型机设计
133.φ2600筒辊磨液压系统及料流控制装置设计
134.φ2600筒辊磨压辊及加压、卸料装置设计
135.水泥粉磨选粉系统改造设计
136.马路保洁车设计
137.某大型水压机的驱动系统和控制系统设计
26.插秧机系统设计
27.搅拌器的设计
28.车床主轴箱箱体右侧10-M8螺纹底孔组合钻床设计
29.工程钻机 的 设 计
30.新型组合式选粉机总体及分级部分设计
31.ZL15型轮式装载机设计
32.卧式钢筋切断机的设计
33.JLY3809机立窑(加料及窑罩部件)设计
34.JLY3809机立窑(窑体及卸料部件)设计
47.GBW92外圆滚压装置设计
48.NK型凝汽式汽轮机调节系统的设计
49.SPT120推料装置设计
50.T611镗床主轴箱传动设计及尾柱设计
51.XQB小型泥浆泵的结构设计
52.YZJ压装机整机液压系统设计
53.板材送进夹钳装置设计
54.棒料切割机设计
55.铲平机的设计
56.车载装置升降系统的开发设计
10.自动洗衣机行星齿轮减速器的设计
自动化生产线机械手及分拣单元设计(含全套CAD图纸)

摘要机电一体化技术是将机械技术、电工电子技术、微电子技术、信息技术、传感器技术、接口技术信号变换技术等多种技术的有机地结合,并运用到实际当中去的技术。
本次设计的是基于自动化生产线中的机械手及分拣单元模块,系统在生产线中完成的是工件的工位转移及按需分拣的过程。
整个系统采用PLC进行控制,机械手模块将工件搬运到分拣单元指定位置,有升降和左右横移两个自由度。
在分拣单元中,利用输送带输送工件,通过使用光电传感器和电感传感器完成对材质、颜色的检测,区分出金属工件以及黑色的非金属工件,在气缸的作用下,利用分拣器达到分拣目的。
关键词:自动化,PLC,气动系统设计,传感测试技术ABSTRACTThe integration of machinery technology is the mechanical skill,the electrician electronic technology,the microelectronic technology,the information technology, the sensor technology,the conection technology signal translation technology and many kinds of technologies organically unifies,and apply to the practice of techniques.What this design is based on automatic production line's in manipulator and the sort unit module,what the system completes in the production line is the work piece location shift and on demand sort process.The overall system uses PLC to carry on the control,the manipulator module transports the work piece to the sort unit assigns the position,has the fluctuation and about moves to two degrees-of-freedom horizontally.In the sort unit,transports the work piece using the conveyor belt, completes through the use photoelectric sensor and the inductive transceiver to the material quality,the color examination,differentiates the metal work piece as well as the black nonmetallic work piece,under air cylinder's function,serves the sort purpose using the time sorter.Key words:Automation,PLC,pneumatic system design,sensor testing technology目录1绪论 (1)1.1本论文的背景和意义 (1)1.2机械手国内外研究现状和趋势 (1)1.3分拣系统国内外发展现状和趋势 (2)1.4设计原则 (4)2自动化生产线机械手及分拣单元的方案设计 (5)2.1总体规格与相关参数 (5)2.2驱动方式的分析与选择 (5)2.3自动化生产线机械手及分拣系统的组成 (6)2.4总体建模效果 (8)3机械手方案设计 (9)3.1机械手坐标形式的选择 (9)3.2手部的选择 (9)3.3气缸等关键部分的设计 (12)4分拣单元结构设计 (22)4.1分拣单元的主要组成部分及各自功能 (22)4.2输送部分的设计与计算 (22)4.3传感检测部分 (25)4.4导向部分 (29)4.5滑槽部分 (34)5控制系统的设计 (35)5.1方案简述 (35)5.2机械手气动控制系统的设计 (36)5.3分拣系统控制系统的设计 (43)6总结 (48)7参考文献 (50)致谢 (51)1绪论1.1本论文的背景和意义自动生产线的最大特点是它的综合性和系统性,综合性主要涉及机械技术、微电子技术、电工电子技术、传感测试技术、接口技术、信息变换技术、网络通信技术等多种技术有机地结合,并综合应用到生产设备中;而系统性指的是生产线的传感检测、传输与处理、控制、执行与驱动等机构在微处理单元的控制下协调有序地工作,有机地融合在一起。
机械手课程设计cad图纸
机械手课程设计cad图纸一、课程目标知识目标:1. 学生能理解机械手的基本结构及其在设计中的功能。
2. 学生能掌握CAD软件的基本操作,包括绘图、修改、标注等。
3. 学生能运用CAD软件绘制出机械手的三视图,并正确表达尺寸。
技能目标:1. 学生能够运用CAD软件进行机械设计,具备初步的工程图纸绘制能力。
2. 学生能够通过实际操作,提高空间想象能力和解决问题的能力。
3. 学生能够通过团队协作,完成机械手的设计任务,提高沟通与协作能力。
情感态度价值观目标:1. 学生培养对机械设计和制造的兴趣,激发创新意识。
2. 学生在课程中培养严谨、细致的工作态度,提高责任感和成就感。
3. 学生通过课程学习,认识到团队合作的重要性,培养集体荣誉感。
分析课程性质、学生特点和教学要求,本课程将目标分解为具体学习成果,包括但不限于:1. 学生能独立完成机械手的三视图绘制,正确表达尺寸。
2. 学生能通过小组讨论,优化机械手设计,提高其性能。
3. 学生在课程结束后,能对CAD软件在机械设计中的应用有更深入的理解,为未来深入学习奠定基础。
二、教学内容1. 机械手基本结构及功能介绍:包括机械手的组成部分、工作原理及在设计中的应用。
- 教材章节:第二章 机械手基础知识- 内容列举:机械手的分类、结构、功能及其在设计中的重要性。
2. CAD软件基本操作与使用技巧:学习CAD软件的界面、绘图、修改、标注等功能。
- 教材章节:第三章 CAD软件应用- 内容列举:CAD软件的基本操作、绘图工具、修改工具、标注方法等。
3. 机械手三视图绘制与尺寸标注:学习如何利用CAD软件绘制机械手三视图,并正确表达尺寸。
- 教材章节:第四章 机械图纸绘制- 内容列举:三视图绘制方法、尺寸标注规范、视图布局等。
4. 机械手设计优化与团队协作:通过小组讨论,优化机械手设计,提高其性能。
- 教材章节:第五章 机械设计与优化- 内容列举:设计优化方法、团队协作技巧、沟通与协调等。
油泵凸轮轴加工自动线送料机械手设计
本科生毕业论文(设计)题目:凸轮轴自动线机械手设计学习中心:层次:专业:机械设计制造及其自动化年级:学号:学生:指导教师:摘要随着工业自动化的发展,工业机械手的应用越来越普遍,已被广泛地应用于各行各业的工矿企业中。
本文主要针对用于油泵凸轮轴自动线上,在相邻工位间搬运工件的机械手进行设计。
首先,简要介绍了机械手的基本概念、机械手的组成和分类,以及工业机械手的简史和发展趋势。
其次,本文通过机械手的动作分析,确定了机械手的坐标形式、自由度和驱动机构,确定了机械手的主要技术参数;完成了油泵凸轮轴自动线机械手的总体方案设计。
再次,完成了机械手的手部、臂部和机身的结构设计。
最后,通过对机械手的动作行程分析,完成了机械手的液压缸设计和液压元件的选择;设计了可满足机械手循环动作要求的液压系统原理图和电气控制图。
关键字:机械手液压缸液压系统直角坐标目录1 绪论 (1)1.1前言 (1)1.2工业机械手的简史 (1)1.3机械手的组成和分类 (2)1.3.1机械手的组成 (2)1.3.2机械手的分类 (3)1.4工业机械手的发展趋势 (5)1.5本文主要研究内容 (7)1.6本章小结 (7)2 机械手总体设计方案 (8)2.1机械手基本形式的选择 (8)2.2机械手的主要部件及运动 (8)2.3驱动机构的选择 (8)2.4机械手的技术参数 (8)2.5本章小结 (9)3 手部、臂部和机身结构设计 (10)3.1手部结构设计 (10)3.1.1手部设计的基本要求 (10)3.1.2手抓类型及夹紧装置的选择 (11)3.1.3手部驱动力的计算 (12)3.2臂部结构设计 (13)3.2.1臂部设计原则 (13)3.2.2臂部具体设计方案及计算 (14)3.3机身机构设计 (16)3.4本章小结 (16)4 驱动控制系统设计 (17)4.1拟定液压系统原理图 (17)4.1.1机械手动作行程分析 (17)4.1.2液压系统原理图设计 (17)4.1.3液压系统电磁阀动作顺序表 (20)4.1.4液压系统工作原理 (20)4.2电气控制系统 (23)4.2.1电气系统图 (23)4.2.2电气系统工作原理 (24)4.3液压缸设计 (27)4.3.1液压缸主要参数的确定 (27)4.3.2液压缸强度的校核 (28)4.4液压元件的选择 (29)4.4.1动力元件——液压泵 (29)4.4.2控制元件——方向阀、压力阀 (30)4.4.3辅助元件 (31)4.5本章小结 (32)结论 (33)致谢 (34)参考文献 (35)附图 (36)1 绪论1.1 前言用于再现人手功能的技术装置称为机械手[1]。
凸轮轴磨床上下料机械手设计
在模锻方面,国内大批量生产的3t、5t、10t模锻锤,其所配的转底炉,用两只机械手成一定角度布置在炉前,实现进出料自动化。上海柴油机厂、北京内燃机厂、洛阳拖拉机厂等已有较成熟的经验。
总的来说,工业机械手满足了社会生产的需要,其主要特点是:
1)对环境的适应性强,能代替人从事危险、有害的操作,在长时间工作对人体有害的场所,机械手不受影响,只要根据工作环境进行合理设计,选择适当的材料和结构,机械手就可以在异常高温或低温、异常压力和有害气体、粉尘、放射线作用下,以及冲压、灭火等危险环境中胜任工作。
3)由于机械手的动作准确,因此可以稳定和提高产品的质量,同时又可避免人为的操作错误。
4)机械手特别是通用工业机械手的通用性、灵活性好,能较好地适应产品品种的不断变化,以满足柔性生产的需要。这是予以改变,而其众多的自由度,又提供了迅速改变作业内容的可能,在中、小批量的自动化生产中,最能发挥其作用。
In the transmission system and in drive's design, unifies each hydraulic cylinder's movement, has carried on the analysis to the hydraulic fluid current capacity and the pressure, in the union hydraulic pressure principle each kind of commonly used return route's function and various hydraulic element selects the principle, formulated a set of complete hydraulic system
自动生产线装卸机器手设计

铜陵学院毕业设计摘要从机器人诞生到本世纪80年代初,机器人技术经历了一个长期缓慢的发展过程。
到了90年代,随着计算机技术、微电子技术、网络技术等的快速发展,机器人技术也得到了飞速发展。
除了工业机器人水平不断提高之外,各种用于非制造业的先进机器人系统也有了长足的进展。
近年来,人类的活动领域不断扩大,机器人应用也从制造领域向非制造领域发展。
像海洋开发、宇宙探测、采掘、建筑、医疗、农林业、服务、娱乐等行业都提出了自动化和机器人化的要求。
这些行业与制造业相比,其主要特点是工作环境的非结构化和不确定性,因而对机器人的要求更高,需要机器人具有行走功能,对外感知能力以及局部的自主规划能力等,是机器人技术的一个重要发展方向。
而工业机器人在许多生产领域的使用实践证明,它在提高生产自动化水平,提高劳动生产率和产品质量以及经济效益,改善工人劳动条件等方面,有着令世人瞩目的作用,引起了世界各国和社会各层人士的广泛兴趣。
在新的世纪,机器人工业必将得到更加快速的发展和更加广泛的应用。
我的毕业设计选择的题目是“自动生产线装卸工件机械手设计”,由于该机械手是用于生产线上,所以要求它的工作范围完全符合生产线。
技术指标要求五自由度,所以要先选择圆柱型坐标机械手,确定坐标方向,以及实现各个自由度部件的初步传动方案,然后进行分析校核,最后要考虑机械手的空间问题来布置机械手的内部结构,在考虑结构的同时还要注意各部件之间的固定连接问题。
由于时间仓促和作者的知识水平及设计经验有限,论文中的错误和不足在所难免,请各位老师给予批评指正。
关键词:机器人;计算机;微电子;自动化陈仲爽自动生产线装卸工件机械手设计AbstractBorn from the robot to the early 1980s, robotics has experienced a long slow process of development. Into the 1990s, as computer technology, electronics technology, network technology, rapid development, robot technology has been developing rapidly. In addition to the standard industrial robot, a variety of non-manufacturing sector Advanced Robotics system also had improved significantly. In recent years, human activity sectors continued to expand, robot application also from manufacturing to the non-manufacturing business development. Like the ocean development, space exploration, mining, construction, health care, agriculture, forestry, industry, services, and entertainment industry have raised automation and robotization of requirements. These industries and manufacturing industry compared to its main characteristic is the working environment of unstructured and uncertainty to robot requires higher, need robots have walking function, external perception and local autonomous planning ability, and so on, is a robotic technology important direction of development. While industrial robot in many production using proven and improve production automation level, improve productivity and product quality and economic efficiency, improve workers ' working conditions, etc., was astonished, concern and social strata is a lot of interest. In the new century, robot industry will get more rapidly and more widely used.My design choice of topic is "automatic production line of the loader component manipulator design", since the robot is used for the production line, hence the scope of work of the request it fully complies with the production line. Specification requires five degrees of freedom, so you want to select a cylindrical coordinates manipulator, determine the direction of the coordinates and implements various degrees of freedom, part of the project, and then analyze verification, the last thing to consider manipulator space problems to the internal structure of the layout of the robotic arm, in considering the need to pay attention to the various parts of the fixed connection problems.Because of the haste and the author's knowledge level and design experience limited, papers in error and not inevitable, teachers give humour.Key words: Robot; Computers; Microelectronics; Automation铜陵学院毕业设计目录第一章概述 (1)1.1机械手在生产中的作用 (1)1.2机械手的组成和分类 (1)1.3机械手的发展趋势 (3)第二章总体设计方案 (5)2.1设计的主要内容 (5)2.2设计要求 (5)2.3设计的主要参数 (5)第三章机械部分设计 (6)3.1传动系统简图 (6)3.2底座旋转设计部分 (7)3.3X方向直线运动设计部分 (11)3.4三自由度手腕设计部分 (15)3.5手部设计部分 (18)结论 (22)致谢 (23)参考文献 (24)铜陵学院毕业设计第1章概述1.1 机械手在生产中的作用随着工业生产的飞跃发展,自动化程度的迅速提高,实现工件的装卸、转向、运输或操持焊枪、喷枪、扳手等工具进行加工,装配等作业的自动化,已愈来愈引起人们的重视。
自动生产线机械手的PLC控制系统设计

自动生产线机械手的PLC控制系统设计王成琼(内江职业技术学院四川内江 641000)摘要:本文简要介绍了自动生产线传送带上机械手的工作过程,对机械手PLC控制系统的软硬件设计作了详细的分析研究。
关键词:机械手;PLC;控制系统; 顺序功能图Designing of PLC Control Systerm on the Auto-producting LineWang cheng-qiong( Neijiang Vocational & Technical College ,Neijiang 641000)Abstract:This essay introduces the working processes of mechanical manipulator on the auto-production transporting line and it also give a deeply detailed analysis on the software and hardware designing of PLC the control systerm.keywords:Mechnical Manipulator ;PLC;Control system;SFC1引言工业自动生产线应用非常普遍,一般生产线的长度是有限的,为把物料从一条生产线搬运到另一条生产线上,常常采用工业机械手,以提高生产效率。
机械手是指能够自动抓取、操作的装置。
机械手一般由执行系统、驱动系统、控制系统组成,主要完成移动、转动、抓取等动作。
工业机械手的电气控制系统是通过控制气缸电磁换向阀来实现不同的动作的,有采用单片机控制的,也有采用可编程控制器(简称PLC)来控制的。
若采用单片机控制,由于电磁阀的工作电压高于单片机的+5伏电源,所需驱动电流较大,因而须设计功率接口电路,还要进行抗干扰及其可靠性的设计。
若采用PLC控制,因PLC具有高可靠性,灵活性好,丰富的接口,易于使用和维护等优点,则无需考虑上述问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘 要
工业机械手是在新技术革命中迅速发展起来的一项高新技术,它在传统的科技领域与工业部门中获得应用,并显示出强大的生命力,成为人类不可或缺的帮手。工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,提高 劳动生产率和自动化水平。工业生产中经常出现的笨重工件的搬运和长期频繁,单调的操作,如果没有机械手那么工人的劳动强度是很高的,有时候还要用行车员工件,生产速度大大延缓,这种情况采用机械手是很有效的。此外,它能在高温、低温、深水、宇宙、反射性和其他有毒、有污染环境条件上进行操作。更显其优越性,有着广阔的发展前途。
首先,本文介绍了机械手在工业生产中的作用,机械手的组成和分类,说明机械手的自由度和整体坐标形式。同时,给出本课题中机械手的主要技术参数。
其次,本文详细介绍了机械手的设计理论和方Байду номын сангаас。详尽的讨论了机械手手部、臂部和升降机构等的结构设计及其相关计算。
最后,运用CAXA软件对机械手手部进行二维建模