对位用CCD相机
视觉自动对位系统的讲义.
02 13VBiblioteka P CUW
B
2.1 曝光機
紫外线灯
相 机
模板
平台
-流 程-
1.移动玻璃面板至平台
2.检出模板上的标志 3.自动定位 4.确认最终精度
5.用紫外线灯进行露光
6.排出玻璃面板
2.2 玻璃贴合机
玻璃面板Ⅱ
平台 相机
-流 程-
控制头
1.将玻璃面板Ⅱ上的标志移动到相 机视野内
2.检出并登录目标位置
二.视觉自动对位系统选型
对位用CCD相机 ① COG对位系统中因拍照视野范围约为3mm,所以用普通的30万像素
相机即可。 ② 相机拍照IC及玻璃进属于静止状态下拍照,通常用普通隔行扫描相
机即可。如: 松下:ANM832(包含相机电缆线)
Sentech:STC-E43A或STC-E42A (没有包含相机电缆线12W02)
二.视觉自动对位系统选型
目前常见对位平台:
XYθ平台 Xθ+Y平台
UVW平台
X
Y
1
2
Y 1
X 2
4軸平台
二.视觉自动对位系统选型
COG对位光学系统标准配置(参考表) 注:实际情况会有变化
名称
型号
1 远心镜头
MM6-ST65D
2 左侧视棱镜
MML-PSV16L
3 右侧视棱镜
MML-PSV16R
4 高亮度点光源
MLEK-A080W1LR MLEK-A080W2LR MLEK-A230W1LR MLEK-A230W2LR
MLEP-A035W1LR MLEP-A035W1LRD MLEP-A035W3LR MLEP-A035W3LRD
CCD 对位方法

Camera j
E2jk
O1 O2
Camera k
YT1k YT2k O XT1j XT2j XT1k
X XT
2k
Eijk = ((XTij – XTik)2 + (YTij – YTik)2)1/2 dEjk = |E1jk – E2jk| dE = Max (dEJK)
局部参数 : dXi,dYi and dDi
Calc. Positions Move frames Calc. Pan_offsets No Yes Retry mode
No
Nb_corr = Corr_Max Yes
Reject panel Yes
Nb_ corr = Nb_corr + 1
No
Param. In tolerances Yes
0 <= dDi <= Tol4
公差 系数
系数 1 (C1) :
– – – –
缩小dX/dY, dT 在对位的过程中的公差值 被应用于所有的对位(U/P, L/P and U/L) 可以避免有些板被拒曝 0.5 <= C1 <= 1
系数 2 (C2) :
– 扩大dX/dY, dT, dE 和 dD 在对位过程中的校正及确认 的公差 – 仅被用于板子对底片(U/P, L/P). – C2 >= 1
(XTij,YTij) : 第i个元素标靶 在第j个CCD里的坐标 Tijk : angle between element i targets on cameras j and k and the (O,x) axis 第i个元素标靶 在第j个及第K个CCD在 (O,x)上的夹角 条件 : • 1 <= i <= 2 • 1 <= j <= 4 • 1 <= k <= 4 • j <> k
PCB板CCD视觉对位自动焊接方案

PCB板CCD视觉对位自动焊接方案随着工业自动化的发展,视觉系统在自动化生产过程中发挥着越来越重要的作用。
PCB板CCD视觉对位自动焊接方案就是利用视觉系统来实现PCB板的自动对位以及焊接的过程。
首先,需要利用CCD摄像头对PCB板进行图像采集。
CCD摄像头可以将PCB板上的焊点、线路等信息转化为数字信号,并通过数据线传输给图像处理系统。
其次,需要利用图像处理算法对采集到的图像进行处理。
图像处理算法可以对图像进行滤波、二值化、边缘检测等操作,以提取图像中的目标对象。
然后,需要利用特征提取算法从处理后的图像中提取出PCB板上的焊点和线路等特征。
特征提取算法可以基于灰度值、形状、纹理等特征进行特征提取。
接下来,需要利用模式匹配算法将提取出的特征与预设模式进行匹配,以确定PCB板的位置和方向。
然后,需要进行对位精度校正。
对位精度校正算法可以根据匹配结果计算出需要进行的位置和方向调整,以实现精确的对位。
最后,通过自动焊接设备对PCB板进行焊接。
自动焊接设备可以根据对位精度校正结果,自动调整焊头的位置和方向,并进行焊接操作。
1.提高生产效率:自动化的视觉对位和焊接操作可以大大提高生产效率,减少人工操作的时间和成本。
2.提高焊接质量:利用视觉系统可以实现精确的对位和焊接,避免了由于人工操作不准确而造成的焊接质量问题。
3.提高生产灵活性:CCD视觉系统可以适应不同尺寸和形状的PCB板,并能够快速调整对位和焊接参数,提高生产灵活性。
4.减少人工劳动强度:自动化的视觉对位和焊接操作减少了对人工操作员的依赖,减轻了人工劳动强度。
综上所述,PCB板CCD视觉对位自动焊接方案可以通过利用视觉系统实现对PCB板的自动对位和焊接操作,提高生产效率、焊接质量和生产灵活性,同时减少人工劳动强度。
bga 对位原理
bga 对位原理
BGA对位原理主要依赖于光学对位系统。
这种系统使用两个摄像头,一个对准BGA芯片,另一个对准电路板。
这两个摄像头将各自的图像传输到图像处理单元,然后图像处理单元将这两个图像叠加在一起。
操作者可以在显示器上看到叠加后的图像,并据此进行手工调节校准,直到BGA芯片与电路板完全对位。
在光学对位系统中,红色和蓝色的实线和虚线分别代表待焊接BGA芯片的焊球成像路径和待焊接PCB的焊盘成像路径。
这些路径都会被棱镜镜面反射进入CCD摄像机,并在显示器上显现出来,从而帮助操作者实现光学对位操作。
以上信息仅供参考,建议咨询专业人士获取更准确的信息。
对位用CCD相机
二.视觉自动对位系统选型
对位用棱镜:
当要对位的物体距离或安装环境使目前CCD无办法直接成像时,就要通过棱 镜来实现成像.
二.视觉自动对位系统选型
目前常见对位平台:
XYθ平台
UVW平台
X 1 Y 1 Y 2 X 2
Xθ+பைடு நூலகம்平台
4軸平台
二.视觉自动对位系统选型
COG对位光学系统标准配置(参考表) 注:实际情况会有变化 名称 1 2 3 4 5 远心镜头 左侧视棱镜 右侧视棱镜 高亮度点光源 点光源控制器 型号 MM6-ST65D MML-PSV16L MML-PSV16R MCEP-CW8 MLEP-A035W3LR 数量 2 1 1 2 1 品牌 Moritex Moritex Moritex Moritex Moritex 备注 光学倍率6倍 物距:65mm 现是3mm间距,另有1.5 间距可提供 现是3mm间距,另有1.5 间距可提供 白色亮度最高 控制器可接3个光源,但 只需要接2个就可以了
平台
5.粘合玻璃面板ⅠⅡ 6.排出玻璃面板
相机
2.3
点灯检查机
- 流
程 -
1.检出并登录目标位置 2.将玻璃面板ⅠⅡ移动至平台
检查机
3.检出玻璃面板ⅠⅡ的标志并进行 定位 4.点灯检查 5.排出玻璃面板ⅠⅡ
平台
2.4
ACF热贴机
- 流 程 -
4.移动加热头进行粘贴 5.排出玻璃面板
加热加压头
1.登录预先调试好的玻璃面板ⅠⅡ的最佳位置 2.将玻璃面板ⅠⅡ移动至平台 3.检出标志并进行定位处理
0 2
V
P U W C B
1 3
2.1
紫外线灯
曝光機
ccd对位的工作原理

ccd对位的工作原理CCD对位是指通过CCD(Charge Coupled Device,电荷耦合器件)芯片对图像进行叠加对位,实现高精度、高质量的图像处理。
CCD对位的工作原理主要有以下几个步骤:第一步:获取原始图像首先,我们需要获取待处理的原始图像,可以通过数码相机、扫描仪等设备获取。
这个过程中,需要注意确保图像的清晰度和色彩准确度。
第二步:图像预处理在进行CCD对位之前,通常需要对原始图像进行预处理,以满足对位算法的要求。
预处理的具体内容包括:图像去噪、图像增强、图像纠偏等。
第三步:将原始图像转为灰度图像在进行图像对位之前,需要将彩色图像转换为灰度图像。
这个过程主要是为了简化图像处理过程。
通过这种方式,我们可以将一个RGB 三通道的图像转换成一个单通道的灰度图像。
第四步:将灰度图像分为若干个子区域将灰度图像分为若干个子区域,通常可以采用网格划分法来完成。
通过网格划分,会将整个图像分成若干个小块(例如16*16像素大小),方便后续的图像对位处理。
第五步:对子区域进行对位处理在进行子区域对位处理时,通常会采用相关相关(correlation)方法。
相关方法可以计算两个向量之间的相似程度,通过将灰度图像中的像素值看作是一个向量,我们可以计算两幅灰度图像之间的相似程度。
第六步:合并子区域通过对每个子区域依次进行对位处理,我们可以得到多个对位后的子图像。
接下来,我们需要将这些子图像合并成一个完整的对位图像。
这个过程中,需要注意对位算法的精度,确保合并后的图像质量优秀。
总结CCD对位通过对原始图像进行预处理、将灰度图像分为若干个子区域、对子区域进行对位处理、合并子区域等步骤,实现了高精度、高质量的图像对位处理。
在实践中,需要根据具体的应用场景选择合适的对位算法和参数。
ccd相机对位原理
ccd相机对位原理CCD相机对位原理CCD(Charge Coupled Device)是一种常用于图像传感器的器件,它可以将光信号转换为电荷信号,进而转化为数字信号,从而实现图像的捕捉和处理。
在CCD相机中,对位是一项重要的功能,在图像捕捉和处理过程中起着至关重要的作用。
CCD相机的对位原理是通过光电二极管阵列来实现的。
光电二极管阵列是由大量的光电二极管组成的,每个光电二极管都可以感受到光的强弱。
当光线照射到光电二极管上时,光电二极管会产生电流,电流的大小与光的强度成正比。
通过测量电流的大小,我们可以确定光的强弱,并进一步得到图像的亮度信息。
在对位过程中,CCD相机会利用光电二极管阵列来感知图像中的特定目标。
首先,我们需要确定图像中的目标区域,并在CCD相机的图像处理器中设置一个感兴趣的区域(ROI)。
然后,CCD相机会将感兴趣的区域的像素值转换为电荷信号,并通过模数转换器将其转化为数字信号。
接下来,CCD相机会利用特定的算法来对感兴趣的区域进行分析和处理。
例如,可以通过计算感兴趣区域的平均亮度值来确定目标区域的位置。
如果目标区域的平均亮度值超过了设定的阈值,则可以认为目标区域存在。
根据目标区域的位置信息,CCD相机可以进行自动对焦、自动曝光等操作,从而得到清晰、明亮的图像。
在CCD相机的对位过程中,还可以使用其他的图像处理算法来提高对位的准确性和稳定性。
例如,可以利用边缘检测算法来检测目标区域的边缘,并根据边缘的位置信息进行对位。
此外,还可以利用模板匹配算法来识别特定的目标物体,并进行对位操作。
总结起来,CCD相机的对位原理是基于光电二极管阵列的感光特性,通过感知、分析和处理图像中的特定目标区域来实现的。
通过对位,CCD相机可以实现自动对焦、自动曝光等功能,从而得到高质量的图像。
对位技术在机器视觉、数字摄影等领域有着广泛的应用,并不断推动着图像处理技术的发展与创新。
ccd对位的工作原理
ccd对位的工作原理
CCD对位技术是一种基于CCD传感器的图像处理技术,它的工作原理是通过对比两张图像中亮度值的差异,来实现对物体位置的检测。
该技术可以应用于各种自动化设备中,例如机器人、自动化生产线等。
在具体实现中,CCD对位技术需要通过两个CCD摄像头分别捕获两张图像。
然后,对这两张图像进行数字化处理,计算得到两张图像之间像素点的亮度差异。
最后,根据这些差异信息,得出物体的位置和方向。
CCD对位技术具有高精度、快速检测、不受光照条件限制等优点,因此在自动化设备的应用中被广泛采用。
不过,其应用场景也存在一定的限制,例如在高速运动物体的检测中,需要考虑到图像采集的时间问题,从而提高检测的精度和准确性。
- 1 -。
MVAS对位系统常用资料
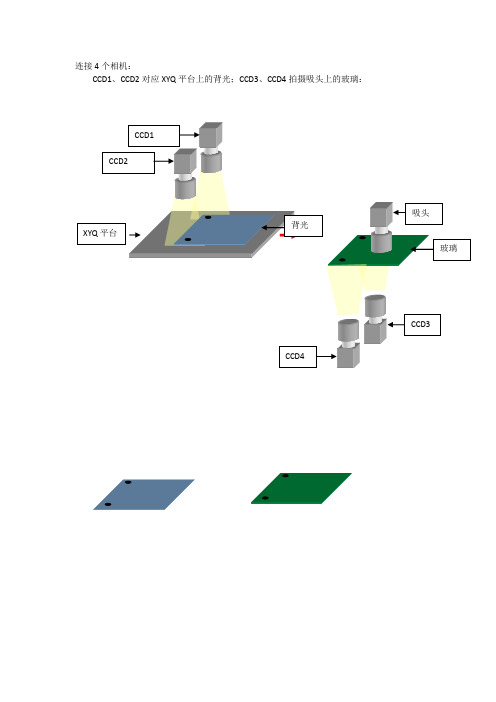
连接4个相机:CCD1、CCD2对应XYQ平台上的背光;CCD3、CCD4拍摄吸头上的玻璃:CCD3、CCD4校正方法:1、将玻璃1用吸头吸住,在测试模式界面下用CCD3、CCD4拍摄玻璃靶标,如下:记录当前XYQ平台位置为P1 (点击按钮“玻璃位置1”)2、移动XYQ到接料位置,接料位置为P2,从P1到P2的移动量为一固定距离X1mm3、吸头下降至平台上方,松开吸头真空,将玻璃放在平台上,平台真空吸附玻璃,移动到P1位置,4、用CCD1、CCD2拍摄玻璃上靶标(对应步骤1中拍摄的系统对应点)(点击按钮“背光位置2”)5、完成步骤4后,松开平台上的真空,用手移动平台上的玻璃少许距离后,再次吸附真空拍摄平台上玻璃的靶标,当前平台在P1位置(点击按钮“背光位置2”)6、完成步骤5后,移动X1mm移动量,将平台移动到P2位置,如下图7、吸嘴下降至玻璃吸附位置,真空吸附玻璃后松开平台的真空,移开平台至P1位置,用CCD3、CCD4再次拍摄玻璃的2个靶标(点击按钮“玻璃位置2”)8、完成上述步骤后,即可进行相机3、4的校正(点击按钮“校正计算”)9、如果步骤8提示计算成功,点击按钮“保存校正结果”10、完成上述步骤后,可以用新玻璃片验证:将玻璃用吸头吸到CCD3、CCD4上方,点击按钮“验证”,如下,在CCD1及CCD2位置会显示2条黄色线,为计算出的玻璃移送处理的靶标位置,将靶标移出,可以人工确认计算是否准确CCD1、CCD2校正方法:CCD1、CCD2相机的校正方法与COG类似,将背光或玻璃放在平台上,执行指令FCLB 1 1与FCLB 1 2,完成2个相机的校正对位方法:1、拍摄玻璃指令:FTGT 62、自动对位指令:FAAL 1,平台会把背光调整到P1位置附近的玻璃对应位置3、对位完成后,移动平台X1mm移动量,即可下降吸头安装玻璃。
5CCD对位系统描述
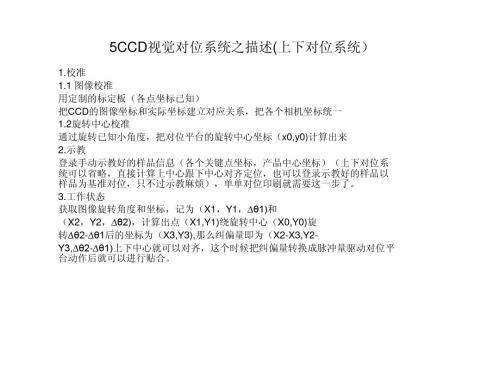
5CCD视觉对位系统之描述(上下对位系统)
1.校准 1.1 图像校准 用定制的标定板(各点坐标已知) 把CCD的图像坐标和实际坐标建立对应关系,把各个相机坐标统一 1.2旋转中心校准 通过旋转已知小角度,把对位平台的旋转中心坐标(x0,y0)计算出来 2.示教 登录手动示教好的样品信息(各个关键点坐标,产品中心坐标)(上下对位系 统可以省略,直接计算上中心跟下中心对齐定位,也可以登录示教好的样品以 样品为基准对位,只不过示教麻烦),单单对位印刷就需要这一步了。 3.工作状态 获取图像旋转角度和坐标,记为(X1,Y1,∆θ1)和 (X2,Y2,∆θ2),计算出点(X1,Y1)绕旋转中心(X0,Y0)旋 转∆θ2-∆θ1后的坐标为(X3,Y3),那么纠偏量即为(X2-X3,Y2Y3,∆θ2-∆θ1)上下中心就可以对齐,这个时候把纠偏量转换成脉冲量驱动ቤተ መጻሕፍቲ ባይዱ位平 台动作后就可以进行贴合。
CCD对位方法
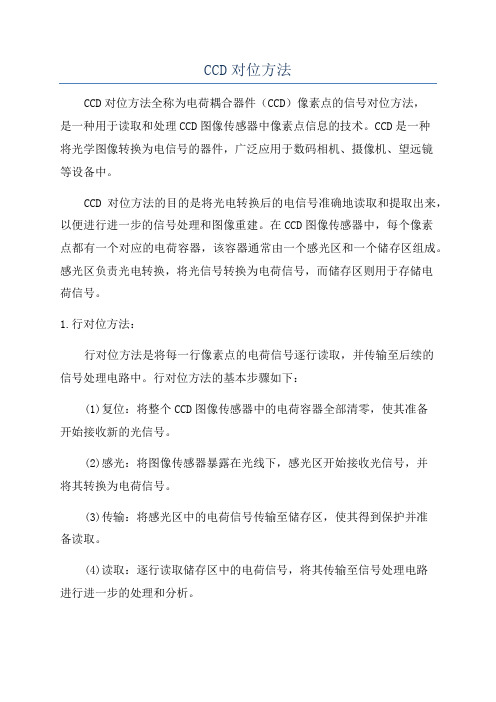
CCD对位方法CCD对位方法全称为电荷耦合器件(CCD)像素点的信号对位方法,是一种用于读取和处理CCD图像传感器中像素点信息的技术。
CCD是一种将光学图像转换为电信号的器件,广泛应用于数码相机、摄像机、望远镜等设备中。
CCD对位方法的目的是将光电转换后的电信号准确地读取和提取出来,以便进行进一步的信号处理和图像重建。
在CCD图像传感器中,每个像素点都有一个对应的电荷容器,该容器通常由一个感光区和一个储存区组成。
感光区负责光电转换,将光信号转换为电荷信号,而储存区则用于存储电荷信号。
1.行对位方法:行对位方法是将每一行像素点的电荷信号逐行读取,并传输至后续的信号处理电路中。
行对位方法的基本步骤如下:(1)复位:将整个CCD图像传感器中的电荷容器全部清零,使其准备开始接收新的光信号。
(2)感光:将图像传感器暴露在光线下,感光区开始接收光信号,并将其转换为电荷信号。
(3)传输:将感光区中的电荷信号传输至储存区,使其得到保护并准备读取。
(4)读取:逐行读取储存区中的电荷信号,将其传输至信号处理电路进行进一步的处理和分析。
行对位方法的优点是可以逐行读取图像信息,操作简单、速度较快,适用于动态图像的采集和处理。
但是,在高分辨率的CCD图像传感器中,行对位方法的读取速度较慢,可能会引起图像伪彩色现象。
2.列对位方法:列对位方法是将每一列像素点的电荷信号逐列读取,并传输至后续的信号处理电路中。
列对位方法的基本步骤如下:(1)复位:将整个CCD图像传感器中的电荷容器全部清零,使其准备开始接收新的光信号。
(2)感光:将图像传感器暴露在光线下,感光区开始接收光信号,并将其转换为电荷信号。
(3)传输:将感光区中的电荷信号传输至储存区,使其得到保护并准备读取。
(4)扫描:逐列读取储存区中的电荷信号,并传输至信号处理电路进行进一步的处理和分析。
列对位方法的优点是可以逐列读取图像信息,适用于高分辨率的CCD 图像传感器,避免了行对位方法中可能出现的伪彩色现象。
平板电脑CG对位压合机器视觉对位步骤要求
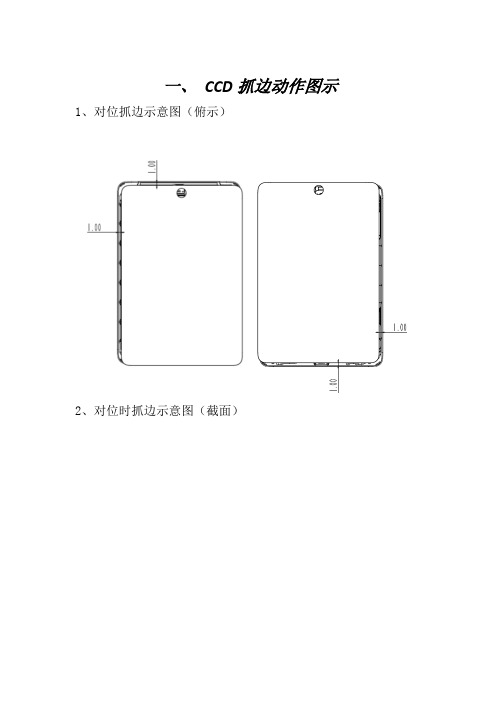
一、CCD抓边动作图示
1、对位抓边示意图(俯示)
2、对位时抓边示意图(截面)
3.CG和housing压合后的状态和复检位置
4、8个Gap位置及命名FAI
5、对位时可选取两种gap 值对位,gap1 和gap3 中的一种。
根据产品实际情况选择抓边方式。
二、CCD抓边对位在程序界面上的示意
1、下图的图像区,纵向区的gap(蓝色框),横向区的gap(红色框)。
第一次对位拍照,只要抓纵向区4个gap值中的一个以及横向区4个gap值中的一个,即可初步计算出平台x,y ,t 的移动量(当然第一次能抓取的gap越多越好,初定位的精度越高,对位次会越少,第一步对位算法考虑了CG 与Housing 初始状态放置得非常不居中时的状况)
2、第二步之后的对位要求8个gap值都需要能提取到,实现精对位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
√
√
×
×
√
√
6倍以上: 例:MML 8 –HR40D MML 6 –HR65D MML 12 –HR110D
×
×
√
√
二.视觉自动对位系统选型
Moritex点光源与控制器对应表
点光源型号 对应控制器
MLEK-A080W1LRD MLEK-A080W1LR MLEK-A080W2LRD MLEK-A080W2LR MLEK-A230W1LRD MLEK-A230W1LR MLEK-A230W2LRDB MLEK-A230W2LR MLEP-A035W1LR MLEP-A035W1LRD MLEP-A035W3LR MLEP-A035W3LRD MLEK-A080W1LRD MLEK-A080W1LR MLEK-A080W2LRD MLEK-A080W2LR MLEK-A230W1LRD MLEK-A230W1LR MLEK-A230W2LRDB W2LR 直接接DC12V电源即可
XPe/P 3-800
UN T
(对位主机)
(PLC)
运动控制器 (运动控制平台)
二.视觉自动对位系统选型
对位主机(Fast):
FV-1100
FV-2300
FV-aligner系列是一款多功能,高精度的定位型图像处理装置。 进行定位时,在相机读取的图像信息的基础上,自动计算出定位所需 的XYθ移动量,然 后通过控制一个三轴平台(或者四轴平台)的移动,实 现对工件进行XYθ校正,从而达到精确对位的目的。
LED点光源
二.视觉自动对位系统选型
Moritex的MML6-ST65D相关参数
LED点光源亮度对比表
二.视觉自动对位系统选型
Moritex各种点光源与镜头倍率对应表(建议表)
镜头 2倍以内: 例:MML 1 -HR65D √ 2-6倍: 例:MML 4 –HR40D MML 4 –HR65D MML 4 –HR110D √ MCEL系列 MCEC系列 MCEP系列 MCEP-C□-070系列
ANM832
STC-E43A/42A
二.视觉自动对位系统选型
特别注意:如果使用Sentech公司的STC-E43A或STC-E42A则需要另外配电 缆线,电缆线的相关参数如下所示 :
红色虚线为需 要另外增加
二.视觉自动对位系统选型
FV2300视频采集接口 :
STC-E43A/42A(12针接头)
FV2300采集卡RICE-001a/b) BNC接头
FV2300如使用STC-E43A/42A相机,则需要一条12针转 BNC,带电源的转接线(相机电源一般为12V)
二.视觉自动对位系统选型
对位用相机 : 选型要点: 根据客户机台结构,选择USB数据线接口 安装的位置.AT型(转角接头)和AS型(垂直接 头).详细请看<<Sentech选型手册>>P3页 200万像素CCD帧率为15fps(高速), 7.5fps (中速),3.5fps(低速),需根据客户要求选型, 如3.5fps(低速)模式可能不能达到客户检测 速度的要求. Sentech公司 STC-TB33USB/STC-TB83USB/STC-TB200USB
二.视觉自动对位系统选型
对位用棱镜:
当要对位的物体距离或安装环境使目前CCD无办法直接成像时,就要通过棱 镜来实现成像.
二.视觉自动对位系统选型
目前常见对位平台:
XYθ平台
UVW平台
X 1 Y 1 Y 2 X 2
Xθ+Y平台
4軸平台
二.视觉自动对位系统选型
COG对位光学系统标准配置(参考表) 注:实际情况会有变化 名称 1 2 3 4 5 远心镜头 左侧视棱镜 右侧视棱镜 高亮度点光源 点光源控制器 型号 MM6-ST65D MML-PSV16L MML-PSV16R MCEP-CW8 MLEP-A035W3LR 数量 2 1 1 2 1 品牌 Moritex Moritex Moritex Moritex Moritex 备注 光学倍率6倍 物距:65mm 现是3mm间距,另有1.5 间距可提供 现是3mm间距,另有1.5 间距可提供 白色亮度最高 控制器可接3个光源,但 只需要接2个就可以了
东莞市速美达自动化有限公司
视觉自动对位系统讲义
工程部:郑茂强 2010/01
讲义要点
一.视觉自动对位系统构成 二.视觉自动对位系统选型 三.视觉自动对位系统应用
一.视觉自动对位系统构成
定位前
定位后
一.视觉自动对位系统构成
(显示器) 滚动球/鼠标/键盘 (触摸屏人机界面)
相机与镜头
光源,棱镜
FValigne r
二.视觉自动对位系统选型
对位软件(Fast):
相机角度不限,支持多种平台,强大的自动校正功能,Mark点搜索方式 自动校正功能可以计算每台相机与平台的相对位置,包括相机、中心点、 相机与平台的角度、相机解析度(mm/像素)、平台的旋转中心点等参数。 定位时,FV-aligner利用校正参数作演算从而执行精密定位。
1
MCEL系列
2
MCEP系列
3
MCEC系列
4
MML-AD-LED-CR12系列
二.视觉自动对位系统选型
对位用镜头,垫环:
可根据客户对位的精度和物距要求进行选型: 选型时请注意景深和畸变问题会影响对位精度. 如:客户要求 要对一块PCB板进行对位,物距约为130mm,宽度约 为3mm的Mark点,厚度为2mm,精度为15um以内 则,根据查表可知:ML05-132N的视野为:7.2*9.6,景深 为:1.95mm,物距为:132.5mm, 如果选用30万像素的CCD,则精度为:9.6mm/640像素=15um
二.视觉自动对位系统选型
对位用CCD相机 ① COG对位系统中因拍照视野范围约为3mm,所以用普通的30万像素 相机即可。 ② 相机拍照IC及玻璃进属于静止状态下拍照,通常用普通隔行扫描相 机即可。如: 松下:ANM832(包含相机电缆线) Sentech:STC-E43A或STC-E42A (没有包含相机电缆线12W02)
新的Fast Aligner对位系统已经支持USB接口 相机.分辨率可以支持200万像素甚至更大分辨 率相机.
二.视觉自动对位系统选型
对位用高亮度LED点光源 ① 因待检测的对象为IC金属面和玻璃面,因此要用同轴点光源。 ② 因对位系统放大倍数较高,选用高倍率的平行远心镜头,其Fno 值大,镜头通光亮较低,那么需 要高亮度LED光源。
二.视觉自动对位系统选型
对位主机(松下):
摄像机A 摄像机B
操作手柄
PV310
算出两台摄像机所拍摄的对位标记的补正量 使用UVW方式/XYθ方式的平台,进行对位 位置控制精度在1μm以上(需要高精度移动平台)
二.视觉自动对位系统选型
对位软件(松下):
使用高精度平台,位置控制PLC进行全自 动对位.适应在线生产或生产线自动化程 度比较高的场合.