倒立摆机电控制系统结构设计
倒立摆控制系统设计报告

控制系统综合设计倒立摆控制系统院(系、部):组长:组员班级:指导教师:2014年1月2日星期四目录摘要----------------------------------------------------------------------------------3 引言----------------------------------------------------------------------------------3一、整体方案设计--------------------------------------------------------------31、需求-----------------------------------------------------------------------------32、目标-----------------------------------------------------------------------------33、概念设计----------------------------------------------------------------------34、整体开发方案设计---------------------------------------------------------35、评估----------------------------------------------------------------------------4二、系统设计--------------------------------------------------------------------4 (一)系统设计-----------------------------------------------------------------41、功能分析----------------------------------------------------------------------42、设计规和约束------------------------------------------------------------63、详细设计----------------------------------------------------------------------7 (二)机械系统设计-----------------------------------------------------------8三、理论分析---------------------------------------------------------------------91、控制系统建模----------------------------------------------------------------92、时域和频域分析------------------------------------------------------------133、设计PID或其他控制器---------------------------------------------------21四、元器件、设备选型--------------------------------------------------------30五、加工制作--------------------------------------------------------------------331、加工图纸---------------------------------------------------------------------382、材料选择----------------------------------------------------------------------383、加工方案----------------------------------------------------------------------38六、安装调试--------------------------------------------------------------------38七、经济性分析-----------------------------------------------------------------39八、结论---------------------------------------------------------------------------391、课程设计总结----------------------------------------------------------------392、感悟和体会-------------------------------------------------------------------393、致-----------------------------------------------------------------------------40九、参考文献----------------------------------------------------------------------40倒立摆控制系统设计摘要:在稳定性控制问题上,倒立摆既具有普遍性又具有典型性。
二级倒立摆的组成及原理毕业设计

二级倒立摆的组成及原理毕业设计第一章 倒立摆控制系统组成§1.1 倒立摆本体一. 倒立摆本体主要由以下几个部分组成:● 基座● 直流伺服电机● 同步带● 带轮● 滑竿● 摆杆● 角编码器 ● 限位开关二. 电控箱内安装有如下主要部件:二级级摆二角编码器摆杆一级编码器一角小车基坐同步带滑杆电动机带轮限位开关编码器三角●直流伺服驱动器●I/O接口板●开关电源●开关、指示灯等电气元件三. 控制平台主要由以下部分组成:●与IBM PC/AT机兼容的PC机(公司不提供),带PCI/ISA总线插槽●GT400-SV-PCI、GM400运动控制卡●GT400-SV-PCI、GM400运动控制卡用户接口软件●演示实验软件§1.2 GT-400-SV四轴运动控制器简介一.引言GT-400-SV四轴运动控制器的核心由ADSP2181数字信号处理器和FPGA组成。
它适用于广泛的应用领域,包括机器人、数控机床、木工机械、印刷机械、装配线、电子加工设备等。
GT-400-SV运动控制器以IBM-PC为主机,提供标准的ISA总线和PCI总线。
同时提供RS232串行通讯和PC104通讯接口,方便用户配置系统硬件。
该运动控制器提供C语言函数库实现复杂的控制功能,用户能够将这些控制函数灵活地与自己控制系统所需的数据处理、界面显示、用户接口等部分集成在一起,建造符合特定应用要求的控制系统,以适应各种应用对象的要求。
使用该运动控制器,要求使用者必须具有C语言编程(在Windows环境下使用动态连接库)的经验。
GT-400-SV将四轴电机控制集成在同一运动控制器上,具有功能强、性能高、价格低、使用方便的特点,适用于模拟量控制及脉冲控制的交流或直流伺服电机、步进电机等多种控制场合。
采用该运动控制器进行控制时,用IBMPC-AT计算机图 1.3 采用四轴运动控制器组成的控制系统框图户需要一台IBM-PC或其兼容机、一套运动控制器及配套的连接电缆和接口端子板、电机及驱动器和外部接口电源等硬件。
一级倒立摆【控制专区】系统设计
基于双闭环PID控制的一阶倒立摆控制系统设计一、设计目的倒立摆是一个非线性、不稳定系统,经常作为研究比较不同控制方法的典型例子。
设计一个倒立摆的控制系统,使倒立摆这样一个不稳定的被控对象通过引入适当的控制策略使之成为一个能够满足各种性能指标的稳定系统。
二、设计要求倒立摆的设计要求是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
实验参数自己选定,但要合理符合实际情况,控制方式为双PID控制,并利用MATLAB进行仿真,并用simulink对相应的模块进行仿真。
三、设计原理倒立摆控制系统的工作原理是:由轴角编码器测得小车的位置和摆杆相对垂直方向的角度,作为系统的两个输出量被反馈至控制计算机。
计算机根据一定的控制算法,计算出空置量,并转化为相应的电压信号提供给驱动电路,以驱动直流力矩电机的运动,从而通过牵引机构带动小车的移动来控制摆杆和保持平衡。
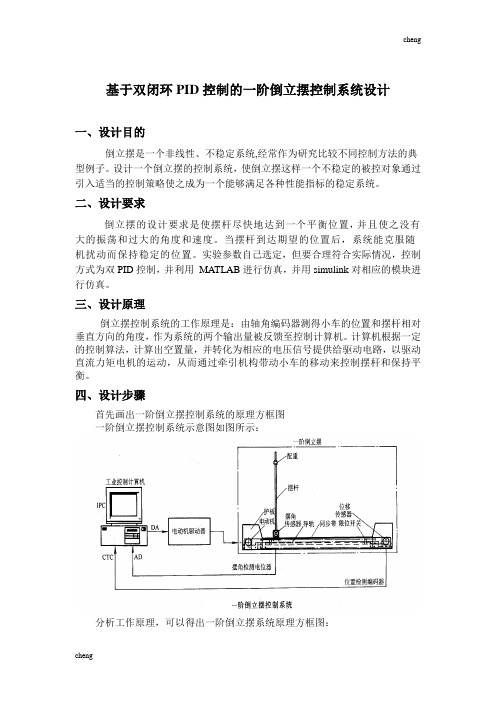
四、设计步骤首先画出一阶倒立摆控制系统的原理方框图一阶倒立摆控制系统示意图如图所示:分析工作原理,可以得出一阶倒立摆系统原理方框图:一阶倒立摆控制系统动态结构图下面的工作是根据结构框图,分析和解决各个环节的传递函数!1.一阶倒立摆建模在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示,其中: M :小车质量 m :为摆杆质量 J :为摆杆惯量 F :加在小车上的力 x :小车位置θ:摆杆与垂直向上方向的夹角 l :摆杆转动轴心到杆质心的长度根据牛顿运动定律以及刚体运动规律,可知: (1) 摆杆绕其重心的转动方程为(2) 摆杆重心的运动方程为得sin cos ..........(1)y x J F l F l θθθ=-2222(sin ) (2)(cos ) (3)x y d F m x l d td F mg m l d t θθ=+=-(3)小车水平方向上的运动为22..........(4)x d xF F M d t-=联列上述4个方程,可以得出一阶倒立精确气模型:()()()()()()()2222222222222222sin .sin cos cos cos .sin cos .lg sin cos J ml F ml J ml m l g x J ml M m m l ml F m l M m m m l M m J ml θθθθθθθθθθθθ⎧+++-⎪=++-⎪⎨+-+⎪=⎪-++⎩式中J 为摆杆的转动惯量:32ml J =若只考虑θ在其工作点附近θ0=0附近(︒︒≤≤-1010θ)的细微变化,则可以近似认为:⎪⎩⎪⎨⎧≈≈≈1cos sin 02θθθθ ⎪⎪⎩⎪⎪⎨⎧++-+=++-+=2..2222..)(lg )()()(Mml m M J mlF m m M Mml m M J g l m F ml J x θθθ 若取小车质量M=2kg,摆杆质量m=1kg,摆杆长度2 l =1m,重力加速度取g=2/10s m ,则可以得 一阶倒立摆简化模型:....0.44 3.330.412x F F θθθ⎧=-⎪⎨⎪=-+⎩即 G 1(s)= ; G 2(s)=一阶倒立摆环节问题解决!2.电动机驱动器选用日本松下电工MSMA021型小惯量交流伺服电动机,其有关参数如下:222()0.4()12() 1.110()s F s s x s s s s θθ-⎧=⎪-⎪⎨-+⎪=⎪⎩驱动电压:U=0~100V 额定功率:PN=200W 额定转速:n=3000r/min 转动惯量:J=3×10-6kg.m2 额定转矩:TN=0.64Nm 最大转矩:TM=1.91Nm 电磁时间常数:Tl=0.001s 电机时间常数:TM=0.003s经传动机构变速后输出的拖动力为:F=0~16N ;与其配套的驱动器为:MSDA021A1A ,控制电压:UDA=0~±10V 。
倒立摆控制系统设计

倒立摆控制系统设计倒立摆是一种经典的控制系统设计问题,经常用于教学和研究中。
倒立摆是一个在竖直平衡位置上方的摆杆,通过控制一些关节的力矩使其保持平衡。
以下是一个倒立摆控制系统的设计过程。
第一步:建立动力学模型首先,需要建立倒立摆的动力学模型。
倒立摆的动力学模型可以通过运动方程来表达。
假设摆的长度为l,质量为m,可以得到摆杆的转动惯量I=m*l^2、摆杆在竖直方向上受到重力加速度g作用。
假设摆杆的角位移为θ,角速度为ω,则可以得到如下的转动方程:I*ω' = -mgl*sin(θ)第二步:线性化模型将非线性动力学模型线性化是控制系统设计中的常见做法。
在线性化之前,需要选择一个工作点作为参考点。
假设工作点为竖直平衡位置,因此θ=0,ω=0。
线性化的目的是在工作点处计算摆杆动态的近似线性表示。
通过对转动方程进行泰勒级数展开并忽略高阶项,可以得到线性化的模型:I*ω' = -mgl*θ第三步:设计控制器在线性化的模型中,我们可以引入一个控制器来控制摆杆的角度,并使之保持在竖直位置。
常见的控制器包括比例控制器(P控制器)、积分控制器(I控制器)和微分控制器(D控制器)。
通过控制器,我们可以得到一个控制信号u,作用于系统中的输入来控制倒立摆。
控制器的设计可以基于设计指标,如系统的快速响应性、稳定性和鲁棒性等。
第四步:模拟和验证在完成控制器设计之后,可以进行仿真和实验来验证系统的控制效果。
倒立摆系统通常可以用控制系统设计软件进行建模和仿真。
可以通过改变控制器的参数来观察系统的响应,并对控制器进行调整和优化。
第五步:系统实现和调试在模拟和验证阶段的成功之后,可以将控制器实现到实际的倒立摆系统中。
可能需要选择合适的硬件平台和传感器来实现对系统状态的测量。
实际实施过程中,可能还需要对控制器进行再次调整和优化,以适应实际系统的特点。
综上所述,倒立摆控制系统设计包括建立动力学模型、线性化模型、设计控制器、模拟和验证、系统实现和调试等步骤。
基于PID的倒立摆控制系统设计

基于PID的倒立摆控制系统设计摘要:倒立摆(Inverted Pendulum)控制系统设计是控制理论教学中的一种典型的实验对象,具有很高的教学和科研价值。
本文基于PID控制算法,设计一个倒立摆控制系统,对倒立摆进行控制。
首先介绍了倒立摆系统模型和其动力学方程,然后详细介绍PID控制算法的原理和设计方法,并将其应用于倒立摆系统中,进行控制器的设计。
最后,通过MATLAB/Simulink软件进行系统仿真,并对仿真结果进行分析和讨论。
研究结果表明,PID控制算法能够有效地控制倒立摆系统,并且具有良好的控制性能和稳定性。
一、引言倒立摆控制系统是一种实验教学中常见的控制对象,其模型简单、控制复杂度适中,具有很高的教学和科研价值。
倒立摆系统被广泛应用于控制理论教学、控制算法研究以及控制系统设计等领域。
PID控制是一种常用的控制算法,具有简单、易实现、稳定性好等特点。
因此,本文将基于PID控制算法设计一个倒立摆控制系统,对倒立摆进行控制。
二、倒立摆系统模型和动力学方程倒立摆系统由一个竖直放置的杆和一个可沿杆轴线做直线运动的摆组成。
根据杆的位置和速度,可以得到倒立摆的状态变量,进而得到系统的动力学方程。
本文采用小角度近似,假设杆的运动范围很小,可以将其近似为线性系统,动力学方程可以表示为:$$(M+m)l\ddot{\theta}-ml\ddot{x}\cos(\theta)+m\sin(\theta)g=0$$$$\ddot{x}-\ddot{\theta}l=0$$其中,M为杆的质量,m为摆的质量,l为杆的长度,g为重力加速度,x为摆的位置,$\theta$为杆的倾斜角度。
三、PID控制算法原理和设计方法PID控制算法是一种基于误差信号的反馈控制算法,由比例控制、积分控制和微分控制三部分组成。
比例控制根据当前误差的大小进行控制;积分控制用于消除系统的稳态误差;微分控制用于预测误差的变化趋势,提高系统的响应速度和稳定性。
倒立摆控制系统的设计

倒立摆控制系统的设计对于倒立摆控制系统的设计,主要包括以下几个方面:建立数学模型、设计控制器、仿真和验证。
首先,建立数学模型是控制系统设计的第一步。
倒立摆的数学模型可以用动力学方程来描述。
根据牛顿定律和角动量定理,可以推导出摆的运动方程。
运动方程可以用二阶非线性微分方程来表示。
对于简单的倒立摆,可以假设摩擦等影响可以忽略不计,从而简化模型。
但在实际应用中,需要考虑摩擦等非线性因素的影响。
然后,设计控制器是控制系统设计的核心。
一般来说,倒立摆控制系统使用PID控制器或者模糊控制器。
PID控制器是一种经典的控制器,通过调节比例项、积分项和微分项的权重,可以实现对摆的位置和角度的控制。
模糊控制器则是一种模糊逻辑控制器,通过定义模糊化变量、模糊化规则和模糊推理等步骤,实现对摆的控制。
在设计控制器时,需要根据具体的系统动态特性和性能指标进行参数调整和优化。
接下来,进行仿真和验证是控制系统设计的关键步骤。
通过使用数学模型和设计好的控制器,在仿真软件或硬件平台上进行仿真实验。
在仿真实验中,可以观察摆的响应特性,如超调量、响应时间和稳态误差等,并对控制器的参数进行调整和优化。
在验证阶段,可以基于实际硬件搭建实验平台,进行实际实验,并与仿真结果进行比较和分析。
最后,根据仿真和验证的结果,可以对控制系统进行进一步的改进和优化。
针对仿真结果中存在的性能指标不达标或者响应不够理想的问题,可以重新调整控制器参数或者进行控制策略的改进。
通过多次迭代和优化,最终可以得到满足需求的倒立摆控制系统。
综上所述,倒立摆控制系统的设计涉及到数学模型的建立、控制器的设计、仿真和验证等多个步骤。
这些步骤需要结合实际需求和性能指标进行调整和优化,才能得到一个有效和稳定的控制系统。
倒立摆控制系统设计是控制工程领域的经典问题,通过对这一问题的研究和探索,可以深入理解控制系统设计的基本原理和方法。
倒立摆系统的控制器设计1(含5篇)
倒立摆系统的控制器设计1(含5篇)第一篇:倒立摆系统的控制器设计1刘翰林倒立摆系统的控制器设计引言1.1 问题的提出生活在大千世界里,摆无处不在。
何为摆?支点在下,重心在上,恒不稳定的系统或装置的叫倒立摆。
相反,支点在上而重心在下的则称为顺摆。
现实生活中,旋转着的芭蕾舞演员,杂技的顶伞,墙上挂钟的钟摆,工作中的吊车等都可被看作是一个摆。
倒立摆的种类繁多,其中包括悬挂式、直线、环形、平面倒立摆等。
一级、二级、三级、四级乃至多级倒立摆。
1.2 倒立摆系统简介倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。
最初研究开始于二十世纪50年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级立摆实验设备。
近年来,新的控制方法不断出现,人们试图通过倒立摆这样一个典型的控制对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找出最优秀的控制方法。
倒立摆系统作为控制理论究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。
由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控和一般工业应用等方面具有广阔的利用开发前景。
平面倒立摆可以比较真实的模拟火箭的飞行控制和步行机器人的稳定控制等方面的研究。
1.3 倒立摆的分类倒立摆已经由原来的直线一级倒立摆扩展出很多种类,典型的有直线倒立摆,环形倒立摆,平面倒立摆和复合倒立摆等,倒立摆系统是在运动模块上装有倒立摆装置,由于在相同的运动模块上可以装载不同的倒立摆装置,倒立摆的种类由此而丰富很多,按倒立摆的结构来分,有以下类型的倒立摆: 1)直线倒立摆系列直线倒立摆是在直线运动模块上装有摆体组件,直线运动模块有一个自由度,小车可以沿导轨水平运动,在小车上装载不同的摆体组件,可以组成很多类别的倒立摆,直线柔性倒立摆和一般直线倒立摆的不同之处在于,柔性倒立摆有两个可以沿导轨滑动的小车,并且在主动小车和从动小车之间增加了一个弹簧,作为柔性关节。
一阶倒立摆控制系统设计

一阶倒立摆控制系统设计首先,设计一阶倒立摆控制系统需要明确系统的参数和模型。
一阶倒立摆通常由一个平衡杆和一个摆组成。
平衡杆的长度、摆的质量和位置等都是系统的参数。
根据平衡杆的转动原理和摆的运动方程,可以得到一阶倒立摆的数学模型。
接下来,根据系统的数学模型,进行系统的稳定性分析。
稳定性分析是判断一阶倒立摆控制系统是否能够保持平衡的重要步骤。
常用的稳定性分析方法有判据法和根轨迹法。
判据法通过计算特征方程的根来判断系统的稳定性,根轨迹法则通过特征方程的根随一些参数变化的路径来分析系统的稳定性。
在进行稳定性分析的基础上,选择合适的控制策略。
常见的控制策略有比例控制、积分控制和微分控制等。
比例控制通过将系统的输出与期望值之间的差异放大一定倍数来控制系统;积分控制通过积分系统误差来进行控制;微分控制通过对系统误差的微分来进行控制。
在选择控制策略时,需要考虑系统的动态响应、稳态误差和鲁棒性等指标。
在选定控制策略后,进行控制器的设计和参数调节。
控制器是实现控制策略的核心部分。
控制器可以是传统的PID控制器,也可以是现代控制理论中的模糊控制器、神经网络控制器等。
控制器的参数需要通过试探法、经验法或者系统辨识等方法进行调节,以使系统达到最佳的控制效果。
最后,进行实验验证和性能评估。
在实验中,需要将控制器与倒立摆系统进行连接,并输入一定的控制信号。
通过测量系统的输出响应和误差,可以评估控制系统的性能,并进行调整和改进。
综上所述,一阶倒立摆控制系统设计的步骤包括系统参数和模型确定、稳定性分析、控制策略选择、控制器设计和参数调节、实验验证和性能评估等。
在设计过程中,需要综合考虑系统的稳定性、动态响应和鲁棒性等因素,以实现一个稳定可靠、性能优良的一阶倒立摆控制系统。
倒立摆系统结构

倒立摆系统结构
倒立摆概述
倒立摆系统主要由计算机、A/D、D/A、电机、电位器以及一些机械部件所构成。
计算机作为数字控制器实现对系统的实时控制,同时也为操作者提供人一机界面,完成对系统的监督功能,如实时画图、数据采集等:A/D、D/A接口板插在计算机内,完成数模、模数的转换;放大器用于电压和功率的放大;电机是系统的执行元件和速度反馈元件:电位器是测量元件,它分别检测了小车相对于轨道中心点的相对位置和摆与铅垂线的角度偏移和角速度。
单级倒立摆系统的整套机械部件分别安装在两块底板上,底板上固定着导轨支架、电机底座和滚动轴承等装置。
通过导轨支架安装好小车滑行的导轨,小车用电机和滚动轴承通过传动皮带实现运动,小车连着电位器。
如图所示的分别是倒立摆系统的原理图和结构图。
倒立摆系统原理图
倒立摆系统结构图
倒立摆是一个数字式的闭环控制系统,其工作原理如下:
小车在电机的拖动下沿固定的直线轨道进行运动,相应的产生了小车的直线位移、速度、倒立摆偏移角位移和角速度,这些变量都可以通过安装在不同部位的电位器测得。
测得的数掘通过A/D转换送到计算机,经过计算机内部对数据处理后产生控制指令,该控制指令经D/A变换、放大器放大后再输出给电动机,从而产生相应的控制作用,从而实现对小车位移和倒立摆角位移的控制。
控制对象是能在轨道上滑动的小车,小车上面竖立~个倒立摆。
当小车运动时,倒立摆就会与小车一起摆动。
用电位计测出摆角e和小车的位移X送到A/D转换成数字信号,通过控制器对信号进行控制,控制量经D/A转换成模拟量,经放大后给执行电机,电机经传动装置带动小车运动,使车和倒立摆到达预定位置并通过车的运动控制e角,以使摆角为零,从而达到控制的目的。
倒立摆结构设计

两级倒立摆设计说明书摘要机械工业是一个国家的重要产业,机械工业的发展无时不刻都在影响着国家经济的发展,人类的进步离不开机械工业的发展。
在全球经济发展的大环境下,中国各个行业被其他国家的先进技术影响的同时,越来越多的外国企业和品牌传播到中国已经成为现实。
在新的市场需求的推动下,对倒立摆机电控制系统进行改良和优化是当务之急。
有大型倒立摆机电控制系统生产企业对设备的安全指标的有着一定生产的严格要求。
在生产设备的企业,充分考虑到在设备运行中可能出现的问题,从而减少噪声污染引起的振动或不当操作设备的现象等。
国内倒立摆机电控制系统设备的研发及制造要与全球号召的高效经济、安全稳定主题保持一致。
倒立摆机电控制系统的发展与人类社会的进步和科学技术的水平密切相关。
近期对机械行业中倒立摆机电控制系统的使用情况进行了调查,发现在机械行业中倒立摆机电控制系统的应用场合比比皆是。
本次的毕业设计课题的是倒立摆机电控制系统的设计。
本文介绍了倒立摆机电控制系统的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,该倒立摆机电控制系统的优点是高效,经济,并且安全系数高,运行平稳。
本次倒立摆机电控制系统的设计,大大地提高了人们对机电控制系统思想觉悟,并且对后续的倒立摆机电控制系统的开发和研制都有着一定的影响,在某种程度上大大提升了该设备在国内外的竞争力,体现了机械工业重要性这一核心价值。
关键词:倒立摆系统控制对象强耦合系统变量Inverted pendulum electromechanical control system structure design specificationabsraotePneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.This article is mainly of the pneumatic manipulator the overall design, and pneumatic design.This mechanism of manipulator includes cylinders and claws and connectors parts, it can move according to the due track on the movement of grabbing, carrying and unloading.The pneumatic part of the design is primarily to choose the right valves and design a reasonable pneumatic control loop, by controlling and regulating pressure, flow and direction of the compressed air to make it get the necessary strength, speed and changed the direction of movement in the prescribed procedure work.The inverted pendulum is a typical high order system, with multi- variable, non-linear, strong-coupling, fleet and absolutely instable. It is representative as an ideal model to prov e new control theory and techniques. During the control process, pendulum can effectively reflect many key problems such as equanimity, robust, follow-up and track, therefore.This paper studies a control method of double inverted pendulum First of all, the mathematical model of the double inverted pendulum is established, then make a control design to doub le inverted pendulum on the mathematical model, and determine the system performance index weight matrix by using genetic algorithm in order to attain the system state feedback control matrix. Finally, the simulation of the system is made After several test matrix valu e the results are not satisfactory response, then we optimize matrix by using Genetic Algo rithm. Simulation results show: The system response can meet the design requirements eff ectively after Genetic Algorithm optimization.Key word: pneumatic manipulator;cylinder;pneumatic loop;Four degrees of freedom.目录摘要 (2)Abstract (2)第一章引言 (3)1.1 课题的研究背景和意义 (4)1.2倒立摆系统的工作原理 (6)第二章倒立摆机电控制系统结构的总体设计 (7)2.1 倒立摆机电控制系统结构的功能需求 (8)2.2 系统实现结构图 (9)第三章倒立摆机电控制系统结构设计 (10)3.1控制系统的构成 (11)3.2控制系统硬件电路核心元件的选择 (11)3.2.1伺服电机的工作原理及选型计算 (12)3.2.2伺服电机的工作原理 (12)3.2.3伺服电机的选型计算 (13)3.3光电码盘的工作原理及作用 (13)3.3.1光电码盘的工作原理 (14)3.4直线导杆的选择 (17)3.5同步带轮传动的选择计算 (20)第四章倒立摆机电控制系统中PID的控制算法的实现 (22)4.1PID控制算法简介 (23)4.1.2PID控制各部分的特点 (23)4.1.3PID控制器各部分参数的选定 (23)4.2PID控制算法的实现 (23)结论 (24)致谢 (25)参考文献 (26)第一章引言1.1课题的研究背景和意义由于机械工程的知识总量已经远远超越个人掌握所有,一些专业知识是必不可少的。
简易旋转倒立摆及控制系统的设计与实现 简易旋转倒立摆及控制装置——直流电机

简易旋转倒立摆及控制系统的设计与实现摘要系统主要由倒立摆系统的机械结构、数据采集系统、单片机控制系统、电机及其驱动系统和电源系统等五大部分组成。
系统的软硬件设计都采用模块化设计思想。
构建了系统的机械结构部分,包括旋臂、摆杆和步进电机。
详细介绍了传感器电路、单片机最小系统、电机驱动电路、控制电路和外围电路的设计,采用角度传感器SCA60C和模数转换器MCP3221构成了采样及ADC模块电路。
主控芯片采用Silicon公司的C8051F340,根据接收的传感器信号计算控制律,并通过单片机产生控制输出,采用直流电机驱动芯片L298N将控制信号施加于执行电机以控制电机及驱动模块。
在对系统数学模型进行分析的基础上,利用PID控制方法,结合ADC数据采集模块,实现了位置型PID控制算法。
设计中采用软硬件结合的抗干扰技术,提高了系统的可靠性。
最后对系统进行了整体测试,测试结果表明,系统性能能达到题目规定的相关要求,并提出了优化和改进措施。
关键词:旋转倒立摆;PID控制算法;控制系统;单片机1. 系统方案旋转倒立摆的结构如图1所示。
根据题目的设计要求,电动机A固定在支架B上,通过转轴F 驱动旋转臂C旋转。
摆杆E通过转轴D固定在旋转臂C的一端,当旋转臂C在电动机A驱动下作往复旋转运动时,带动摆杆E在垂直于旋转臂C的平面作自由旋转。
图1 旋转倒立摆结构示意图旋转式倒立摆的机械结构主要包括旋臂、摆杆、直流电机以及角度传感器部分。
其中直流电机为执行机构,可由专门的电机驱动芯片L298N驱动。
旋臂和摆杆之间由角度传感器连接,摆杆可绕旋臂在垂直平面内转动。
旋臂和摆杆的角位移信号由角度传感器测量得到,作为系统的输入量送入到控制器中,根据一定的算法计算得到控制律并转化为电压信号提供给驱动芯片,来驱动直流电机转动,从而带动旋臂在水平面内旋转,最终实现控制摆杆直立的效果。
旋转倒立摆控制系统结构如图2所示。
在系统中,可通过倾角传感器的反馈获得自由摆末端被控对象的位移,控制驱动模块实时读取传感器反馈的数据,确定控制决策(包括电机的转动方向、转动速度、转动角度等),同时控制模块通过处理器内部的控制算法实现该控制决策,产生相应控制量。
倒立摆控制系统的设计与实现
倒立摆控制系统的设计与实现引言倒立摆是一种复杂的机械系统,在工业自动化、机器人学、航空航天等领域都有广泛应用。
如何掌控倒立摆的姿态是一个重要的问题,因此进行控制系统的设计和实现是必不可少的。
本文将介绍倒立摆控制系统的设计和实现。
一、倒立摆系统的组成倒立摆系统是由一个摆杆和一个转轴组成的。
摆杆通过转轴和转动连接到支架上。
倒立摆的底部是一个电机,用于向倒立摆施加力。
二、倒立摆系统的控制原理控制倒立摆的核心原理是反馈控制。
传感器将倒立摆的状态信息反馈给控制器,控制器计算出所需的力矩,然后电机施加所需的力矩将摆杆保持在垂直状态。
三、倒立摆系统的控制器设计1.控制器的类型在倒立摆控制系统中,传统的PID控制器被广泛使用。
此外,还有一些高级控制器,如模糊控制器和神经网络控制器。
2.传感器的选择为了计算正确的力矩,我们需要一个准确的传感器。
我们可以选择陀螺仪、加速度计或角度传感器。
3.控制器参数调整控制器参数调整是控制器设计的关键部分之一。
所选的控制器对系统响应时间、稳态误差和阻尼比等指标具有不同的影响。
通过不断调整控制器的参数,使系统保持稳定并快速响应。
四、倒立摆系统的实现在实际的倒立摆系统中,除了控制器外,还需要编写程序来将传感器数据反馈给控制器,计算力矩并控制电机。
此外,还需要设计电路板和选择适当的电机来控制摆杆的倾斜。
五、倒立摆系统的应用1.教育倒立摆系统可以用于教授物理、控制工程和机器人学等学科的基础知识。
其可视化和实验性质使其非常适合用于学术教学。
2.机器人学倒立摆控制系统在机器人学中得到广泛应用。
它可以用于控制机器人臂的运动,以及控制移动机器人的平衡。
3.摆臂系统倒立摆控制系统还可以用于改进摆臂系统,以控制各种工艺参数。
在重型机器和船舶等领域,通过控制倒立摆的悬挂动态平衡,可以使要处理的物品更加稳定。
结束语倒立摆控制系统是一项极具挑战性的工程。
它可以用于教学、机器人学和工业自动化等领域。
通过正确的传感器和控制器设计,结合适当的电路和机械设计,可以实现快速和精确的摆杆控制,从而取得非常好的结果,并具有广泛的应用前景。
倒立摆控制系统的设计

倒立摆控制系统的设计倒立摆是一个常见的控制系统示例,用于探索倒立摆的控制理论和设计方法。
倒立摆是一个由一个可旋转的杆和一个质量可忽略不计的小球组成的系统。
通过控制杆的角度和角速度,可以使小球保持在直立的位置上,即实现倒立摆系统的控制。
首先,需要建立倒立摆的数学模型。
数学模型可以通过运动学和动力学方程来描述。
运动学方程描述摆杆角度和角速度之间的关系,动力学方程描述摆杆受到的力和加速度之间的关系。
根据数学模型可以得到系统的传递函数,即将输入信号映射为输出信号的数学表达式。
其次,通过对系统传递函数进行稳定性分析,选择合适的PID参数。
PID控制器由比例项、积分项和微分项组成,可以通过调整这三个参数来实现系统的控制。
比例项用于调整响应速度,积分项用于消除稳态误差,微分项用于抑制震荡。
根据系统的稳定性分析,可以选择合适的PID参数。
然后,进行PID控制器的仿真和调整。
通过将PID控制器连接到倒立摆系统并进行仿真,在仿真中可以观察系统的响应和稳定性。
如果系统的响应不理想,可以通过调整PID参数来改善系统的性能。
最后,实施实际的控制系统,并进行参数调优。
将设计好的PID控制器实施到实际的倒立摆系统中,通过不断调整PID参数,观察系统的响应和稳定性,以达到设计要求。
此外,还可以采用其他控制策略进行倒立摆控制系统的设计。
模糊控制方法利用模糊推理和模糊集合来实现系统的控制,可以处理非线性和模糊的系统。
模型预测控制方法则利用建立系统动态模型进行优化预测,以实现更精确的控制。
在设计控制系统时,还需考虑实际应用中的实时性、鲁棒性和可扩展性等因素。
倒立摆控制系统的设计是一个综合技术问题,需要结合系统的特点和实际应用要求来进行综合设计。
总结起来,倒立摆控制系统的设计包括建立数学模型、选择控制策略和参数、仿真和调整PID控制器、实施及参数调优等步骤。
通过合理的设计和优化,可以实现倒立摆系统的稳定控制。
在实际应用中,还需考虑系统的实时性、鲁棒性和可扩展性等因素,对控制系统进行综合设计和优化。
(完整word版)一级倒立摆控制系统设计
基于双闭环PID控制的一阶倒立摆控制系统设计一、设计目的倒立摆是一个非线性、不稳定系统,经常作为研究比较不同控制方法的典型例子。
设计一个倒立摆的控制系统,使倒立摆这样一个不稳定的被控对象通过引入适当的控制策略使之成为一个能够满足各种性能指标的稳定系统.二、设计要求倒立摆的设计要求是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度.当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
实验参数自己选定,但要合理符合实际情况,控制方式为双PID控制,并利用MATLAB进行仿真,并用simulink对相应的模块进行仿真。
三、设计原理倒立摆控制系统的工作原理是:由轴角编码器测得小车的位置和摆杆相对垂直方向的角度,作为系统的两个输出量被反馈至控制计算机。
计算机根据一定的控制算法,计算出空置量,并转化为相应的电压信号提供给驱动电路,以驱动直流力矩电机的运动,从而通过牵引机构带动小车的移动来控制摆杆和保持平衡.四、设计步骤首先画出一阶倒立摆控制系统的原理方框图一阶倒立摆控制系统示意图如图所示:分析工作原理,可以得出一阶倒立摆系统原理方框图:一阶倒立摆控制系统动态结构图下面的工作是根据结构框图,分析和解决各个环节的传递函数!1.一阶倒立摆建模在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示,其中:M:小车质量m:为摆杆质量J :为摆杆惯量 F:加在小车上的力 x :小车位置θ:摆杆与垂直向上方向的夹角l :摆杆转动轴心到杆质心的长度根据牛顿运动定律以及刚体运动规律,可知:(1) 摆杆绕其重心的转动方程为(2) 摆杆重心的运动方程为得(3)小车水平方向上的运动为22..........(4)x d xF F M d t -=联列上述4个方程,可以得出一阶倒立精确气模型:()()()()()()()2222222222222222sin .sin cos cos cos .sin cos .lg sin cos J ml F ml J ml m l g x J ml M m m l ml F m l M m m m l M m J ml θθθθθθθθθθθθ⎧+++-⎪=++-⎪⎨+-+⎪=⎪-++⎩式中J 为摆杆的转动惯量:32m l J =sin cos ..........(1)y x J F l F l θθθ=-2222(sin ) (2)(cos ) (3)x y d F m x l d td F mg m l d t θθ=+=-若只考虑θ在其工作点附近θ0=0附近(︒︒≤≤-1010θ)的细微变化,则可以近似认为:⎪⎩⎪⎨⎧≈≈≈1cos sin 02θθθθ ⎪⎪⎩⎪⎪⎨⎧++-+=++-+=2..2222..)(lg )()()(Mml m M J mlF m m M Mml m M J g l m F ml J x θθθ 若取小车质量M=2kg,摆杆质量m=1kg,摆杆长度2 l =1m ,重力加速度取g=2/10s m ,则可以得一阶倒立摆简化模型:....0.44 3.330.412x F F θθθ⎧=-⎪⎨⎪=-+⎩ 拉氏变换即 G 1(s )= ; G 2(s)=一阶倒立摆环节问题解决!2.电动机驱动器选用日本松下电工MSMA021型小惯量交流伺服电动机,其有关参数如下: 驱动电压:U=0~100V 额定功率:PN=200W 额定转速:n=3000r/min 转动惯量:J=3×10-6kg 。
倒立摆控制系统设计
毕业设计倒立摆控制系统设计学生姓名:"专业班级:自动化2012级1班指导教师:教授工程师学院:机电工程学院"2016年6月倒立摆控制系统设计摘要。
倒立摆是一种复杂、时变、非线性、强耦合、自然不稳定的高阶系统,许多抽象的控制理论概念都可以通过倒立摆实验直观的表现出来。
本文对单级倒立摆系统的平衡控制问题进行了研究,分别采用根轨迹法、PID法、频域特性法这三种方法实现了单级倒立摆系统的平衡控制。
实际的写作及操作如对直线型单级倒立摆进行数学模型建立,通过仿真的根轨迹图表明原系统不稳定,需要设计相应的控制器进行校正。
三种校正方法都利用MATLAB通过人机界面调用,以完成离线的仿真,进而利用图形化的Simulink作为控制前台基于RTW完成实时控制,在线调整参数就针对直线单级倒立摆系统摆杆的平衡控制应用P1D法,通过根轨迹法依次确定比例、积分、微分的个参数后仿真;运用根轨迹法设计控制器和频域法设计针对摆杆的平衡和小车位置的控制器,然后进入在线实时控制,根据实际控制效果调整控制器参数。
将所设计的控制器分别在实际的物理设备上进行实时控制实验,都成功地实现了倒立摆的平衡控制。
关键词倒立摆;PID系统;根轨迹;频域特性】|@!)《Design of inverted pendulum control systemAbstractInverted pendulum is a complex, time-varying, nonlinear, strong coupling, natural instability of high order systems, many of the abstract control theory can be shown through the inverted pendulum experiment. In this paper, the balance control of single inverted pendulum system is studied, and the balance control of single stage inverted pendulum system is achieved by using the three methods, root locus method, PID method and frequency domain method.The actual writing and operation, such as the linear single inverted pendulum mathematical model is established, through the simulation of the root locus diagram of the original system is not stable, need to design the corresponding controller for correction. Three correction methods are the use of MATLAB through the man-machine interface, to complete the off-line simulation, then the Simulink graphical as front control based on RTW real-time control, online parameter adjustment is for linear single inverted pendulum system pendulum pole balancing control P1D method is applied, by the root locus method in order to determine the proportion, integral and differential parameters simulation; the use of root locus method controller design and frequency domain method of design for the pendulum rod balance and the cart position controller, and then enter the online real-time control, according to the actual control effect to tune the parameters of the controller. The designed controller is implemented in real time control experiments on the actual physical equipment, and the balance control of the inverted pendulum is successfully achieved.-Keywords Inverted Pendulum;PID Control;Root Locus;Frequency Characteristic目录摘要Abstract目录1 绪论 0倒立摆历史发展 0倒立摆研究意义 0倒立摆类型特性 (1)倒立摆控制方法 (2)本章小结 (3)2 倒立摆系统建模 (4)系统受力分析 (4)系统数学模型 (5)仿真分析稳定性 (6)本章小结 (8)3 根轨迹法校正 (9)根轨迹简介 (9)根轨迹分析稳定性 (9)相消法校正系统 (9)本章小结 (11)4 PID法校正 (12)PID简介 (12)PID参数确定 (13)仿真校正 (13)本章小结 (18)5 频域法校正 (19)频率特性简介 (19)频域分析稳定性 (19)频域法校正 (20)本章小结 (22)结论 (23)参考文献 (24)附录 (26)致谢 (28)1 绪论1.1倒立摆历史发展倒立摆有许多控制方面的特性,所以对它的研究是极具意义的,因为不管是国内还是国外都是需要控制进行生产制造方面的工业。
倒立摆系统的控制器研究设计
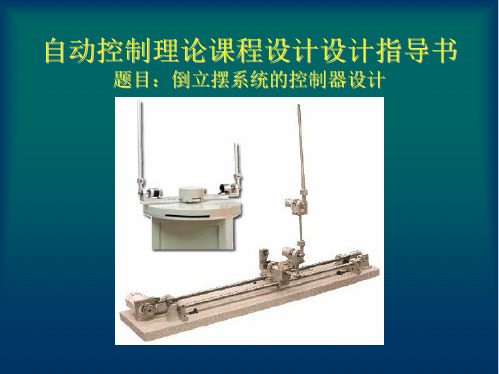
自动控制理论课程设计设计指导书题目:倒立摆系统的控制器设计课程设计概述倒立摆系统的控制器设计倒立摆系统的实时控制课程设计报告内容课程设计概述工程设计控制系统设计课程设计课程设计概述倒立摆系统的控制器设计倒立摆系统的实时控制课程设计报告内容摆的世界:一、倒立摆系统概述倒立摆的种类:图直线一级倒立摆控制系统系统的组成:工程背景:二、数学模型的建立Mx=F−bx−NN=md2dt2(x+lsinθ) =mx+mlθcosθ−mlθ2sinθ(M+m)x+bx +mlθcosθ−mlθ2 sinθ=F(M+m)x+bx+mlθcosθ−mlθ2sinθ=F (I+ml2)θ+mgl sinθ=−mlx cosθ(I+ml2)φ−mglφ=mlx(M+m)x+bx−mlφ=u(I+ml2)φ−mglφ=mlx (M+m)x+bx−mlφ=u v=xΦ(s)=mlsX(s)(I+ml2)s2−mgl V(s)(I+ml)sΦ(s ) =ml s 2q2U (s ) s 4+ b (I +ml )s 3−(M +m )mgl s 2− bmgl s q =[(Mq +m )(I q q +ml 2)−(ml )2]Φ(s ) = 0.02725s 2X (s ) 0.0102125s 2−0.26705Φ(s ) =V (s ) Φ(s ) =0.02725 0.0102125s 2−0.267052.35655s U (s ) s 3+0.0883167s 2−27.9169− 2.30942X (s )=?U (s )三、开环响应分析¾¾¾¾0.027250.0102125s2 −0.26705A m p l i t u dImp ulseResponse60 50 40 30 20 10 000.20.40.60.81 Ti me(sec)四、根轨迹法设计G(s)= Φ(s)V(s)=0.027250.0102125s2−0.26705controllerG c(s).27250.0102125s2 −0.26705¾¾impulsesignal.27250.0102125s2 −0.26705G c(s)controllerG c(s)0 . 027250.0102125s2 −0.26705五、频域法设计Φ(s)V(s)=0.027250.0102125s2−0.26705controllerG c(s).027250.0102125s2 −0.26705impulse signalG c (s )controllerG c (s )¾ ¾impulse signal0.027250.0102125s 2 −0.26705G c (s )controller G c (s )0.027250.0102125s 2 −0.26705六、P I D控制器设计Φ(s)V(s)=0.027250.0102125s2−0.267050.027250.0102125s2−0.267052424¾¾impulsesignal.027250.0102125s2 −0.26705G c(s)controllerG c(s)0 . 027250.0102125s2 −0.26705七、总结进一步讨论倒立摆系统的实时控制1、实控软件的界面292、实时控制的实验操作步骤3、在线的实时参数调整。
倒立摆系统的控制器设计

目录摘要.......................................................................................................................................... - 2 - 1 倒立摆系统概述................................................................................................................................ - 4 -1.1倒立摆的种类......................................................................................................................... - 4 -1.2系统的组成............................................................................................................................. - 4 -1.3工程背景................................................................................................................................. - 4 -2 数学模型的建立................................................................................................................................ - 5 -2.1牛顿力学法系统分析............................................................................................................. - 5 -2.2拉氏变换后实际系统的模型................................................................................................. - 8 -3 开环响应分析.................................................................................................................................... - 9 -4 根轨迹法设计.................................................................................................................................. - 12 -4.1校正前倒立摆系统的闭环传递函数的分析....................................................................... - 12 -4.2系统稳定性分析................................................................................................................... - 12 -4.3 根轨迹设计.......................................................................................................................... - 13 -4.4 SIMULINK仿真..................................................................................................................... - 17 -5 直线一级倒立摆频域法设计........................................................................................................ - 18 -5.1 系统频域响应分析.............................................................................................................. - 18 -5.2频域法控制器设计............................................................................................................... - 20 -5.2.1控制器的选择........................................................................................................... - 20 -5.2.2系统开环增益的计算............................................................................................... - 20 -5.2.3校正装置的频率分析............................................................................................... - 20 -5.3 Simulink仿真..................................................................................................................... - 25 -6 直线一级倒立摆的PID控制设计................................................................................................ - 26 -6.1 PID简介............................................................................................................................... - 26 -6.2 PID控制设计分析............................................................................................................... - 27 -6.3 PID控制器的参数测定....................................................................................................... - 28 -7 总结与体会...................................................................................................................................... - 31 -7.1总结....................................................................................................................................... - 31 -7.2体会....................................................................................................................................... - 31 - 参考文献.............................................................................................................................................. - 32 -摘要倒立摆是一种典型的非线性,多变量,强耦合,不稳定系统,许多抽象的控制概念如系统的稳定性、可控性、系统的抗干扰能力等都可以通过倒立摆直观的反响出来;倒立摆的控制思想在实际中如实验、教学、科研中也得到广泛的应用;在火箭飞行姿态的控制、人工智能、机器人站立与行走等领域有广阔的开发和利用前景。
自动控制原理课程设计——倒立摆系统控制器设计
一、引言支点在下,重心在上,恒不稳定的系统或装置的叫倒立摆。
倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
1.1 问题的提出倒立摆系统按摆杆数量的不同,可分为一级,二级,三级倒立摆等,多级摆的摆杆之间属于自有连接(即无电动机或其他驱动设备)。
对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
1.2 倒立摆的控制方法倒立摆系统的输入来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。
直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。
作用力u平行于铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。
当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向下)。
为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力,使其在轨道上被往前或朝后拉动。
本次设计中我们采用其中的牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型,然后通过开环响应分析对该模型进行分析,并利用学习的古典控制理论和Matlab /Simulink仿真软件对系统进行控制器的设计,主要采用根轨迹法,频域法以及PID(比例-积分-微分)控制器进行模拟控制矫正。
2 直线倒立摆数学模型的建立直线一级倒立摆由直线运动模块和一级摆体组件组成,是最常见的倒立摆之一,直线倒立摆是在直线运动模块上装有摆体组件,直线运动模块有一个自由度,小车可以沿导轨水平运动,在小车上装载不同的摆体组件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
倒立摆机电控制系统结构设计说明书摘要机械工业是一个国家的重要产业,机械工业的发展无时不刻都在影响着国家经济的发展,人类的进步离不开机械工业的发展。
在全球经济发展的大环境下,中国各个行业被其他国家的先进技术影响的同时,越来越多的外国企业和品牌传播到中国已经成为现实。
在新的市场需求的推动下,对倒立摆机电控制系统进行改良和优化是当务之急。
有大型倒立摆机电控制系统生产企业对设备的安全指标的有着一定生产的严格要求。
在生产设备的企业,充分考虑到在设备运行中可能出现的问题,从而减少噪声污染引起的振动或不当操作设备的现象等。
国内倒立摆机电控制系统设备的研发及制造要与全球号召的高效经济、安全稳定主题保持一致。
倒立摆机电控制系统的发展与人类社会的进步和科学技术的水平密切相关。
近期对机械行业中倒立摆机电控制系统的使用情况进行了调查,发现在机械行业中倒立摆机电控制系统的应用场合比比皆是。
本次的毕业设计课题的是倒立摆机电控制系统的设计。
本文介绍了倒立摆机电控制系统的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,该倒立摆机电控制系统的优点是高效,经济,并且安全系数高,运行平稳。
本次倒立摆机电控制系统的设计,大大地提高了人们对机电控制系统思想觉悟,并且对后续的倒立摆机电控制系统的开发和研制都有着一定的影响,在某种程度上大大提升了该设备在国内外的竞争力,体现了机械工业重要性这一核心价值。
关键词:倒立摆系统控制对象强耦合系统变量Inverted pendulum electromechanical control system structure design specificationabsraotePneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.This article is mainly of the pneumatic manipulator the overall design, and pneumatic design.This mechanism of manipulator includes cylinders and claws and connectors parts, it can move according to the due track on the movement of grabbing, carrying and unloading.The pneumatic part of the design is primarily to choose the right valves and design a reasonable pneumatic control loop, by controlling and regulating pressure, flow and direction of the compressed air to make it get the necessary strength, speed and changed the direction of movement in the prescribed procedure work.The inverted pendulum is a typical high order system, with multi- variable, non-linear, strong-coupling, fleet and absolutely instable. It is representative as an ideal model to prov e new control theory and techniques. During the control process, pendulum can effectively reflect many key problems such as equanimity, robust, follow-up and track, therefore.This paper studies a control method of double inverted pendulum First of all, the mathematical model of the double inverted pendulum is established, then make a control design to doub le inverted pendulum on the mathematical model, and determine the system performance index weight matrix by using genetic algorithm in order to attain the system state feedback control matrix. Finally, the simulation of the system is made After several test matrix valu e the results are not satisfactory response, then we optimize matrix by using Genetic Algo rithm. Simulation results show: The system response can meet the design requirements eff ectively after Genetic Algorithm optimization.Key word: pneumatic manipulator;cylinder;pneumatic loop;Four degrees of freedom.目录摘要 (2)Abstract (2)第一章引言 (3)1.1 课题的研究背景和意义 (4)1.2倒立摆系统的工作原理 (6)第二章倒立摆机电控制系统结构的总体设计 (7)2.1 倒立摆机电控制系统结构的功能需求 (8)2.2 系统实现结构图 (9)第三章倒立摆机电控制系统结构设计 (10)3.1控制系统的构成 (11)3.2控制系统硬件电路核心元件的选择 (11)3.2.1伺服电机的工作原理及选型计算 (12)3.2.2伺服电机的工作原理 (12)3.2.3伺服电机的选型计算 (13)3.3光电码盘的工作原理及作用 (13)3.3.1光电码盘的工作原理 (14)3.4直线导杆的选择 (17)3.5同步带轮传动的选择计算 (20)第四章倒立摆机电控制系统中PID的控制算法的实现 (22)4.1PID控制算法简介 (23)4.1.2PID控制各部分的特点 (23)4.1.3PID控制器各部分参数的选定 (23)4.2PID控制算法的实现 (23)结论 (24)致谢 (25)参考文献 (26)第一章引言1.1课题的研究背景和意义由于机械工程的知识总量已经远远超越个人掌握所有,一些专业知识是必不可少的。
但是过度的专业知识分割,使视野狭隘,可以多多参加技术交流,和参加科研项目,缩小范围,提升新技术的进步和整个块的技术,提高外部条件变化的适应能力。
封闭的专业知识的太狭隘,考虑的问题太特殊,在工作中协调困难,不利于自我提高。
因此,自上世纪第二十年代末,出现了一体化的趋势。
人们越来越重视基础理论,拓宽领域,对专业合并的分化。
机械工程可以增加产量,提高劳动生产率,提高生产的经济效益为目标,并研制和发展新的机械产品。
在未来,新产品的开发,降低资源消耗,清洁的可再生能源,成本的控制,减少或消除环境污染作为一个超级经济目标和任务。
机器能完成人的手和脚,耳朵和眼睛等等器官完全不能直接完成的任务。
现代机械工程机械和机械设备创造出更多、更精美的越来越复杂,很多幻想成为过去的现实。
人类现在能成为天空的上游和宇宙,潜入海洋,数十亿光年的密切观察,细胞和分子。
电子计算机硬件和软件,人类的新兴科学已经开始加强,并部分代替人脑科学,这是人工智能。
这一新的发展已经显示出巨大的作用,但在未来几年还将继续创造出不可思议的奇迹。
人类智慧的增长并没有减少手的效果,而是要求越来越精致,手工制作,更复杂的工作,从而促进手功能。
又一方面实践促进人脑智力。
在人类的进化过程中,以及在每个人的成长过程中,大脑和手是互相促进和平行进化。
大脑和手之间的人工智能和机械工程的近似关系,唯一不同的是,智能硬件还需要使用机械制造。
在过去,各种机械离不开人类的操作和控制,反应速度和运算精度的进化是非常缓慢的大脑和神经系统,人工智能将消除这种限制。
相互促进,计算机科学和机械工程进展之间的平行,将在更高层次的新一轮发展的开始使机械工程。
在第十九世纪,机械工程的知识总量仍然是有限的,大学在欧洲,它与一般的土木工程是一门综合性的学科,称为土木工程,下半场的第十九个世纪成为一门独立的学科。
在第二十世纪,随着机械工程和知识增长的发展开始分解,机械工程专业,有分支机构。
在第二十世纪中期趋势分解,在时间之前和之后的第二次世界大战结束时达到的峰值。
由于机械工程的知识总量已经远远从个人掌握所有,一些专业是必不可少的。
但是过度的专业知识使分割,视野狭隘,可以查看和统筹大局和全球工程和技术交流,缩小范围,新技术的进步和整个块的技术,外部条件变化的适应能力差。
封闭的专业知识的专家太狭,考虑的问题太特殊,在工作协调困难,不利于自我提高。
因此,自上世纪第二十年代末,出现了一体化的趋势。
人们越来越重视基础理论,拓宽领域,对专业合并的分化。