基于LabVIEW和NI myRIO的智能避障小车设计
基于LabVIEW和NI myRIO的智能避障小车设计

基于LabVIEW和NI myRIO的智能避障小车设计李立;孙龙建【摘要】综合运用传感器监测、NI myRIO和LabVIEW技术,设计完成了基于LabVIEW和NI myRIO的具有智能和人工操控两种控制模式的智能避障小车.利用NI myRIO处理传感器采集障碍物的距离、小车移动的速度和小车前方是否存在障碍物等参数,通过板载的WiFi模块将数据传输给PC机,并由LabVIEW编写的用户界面实时动态显示和存储上述参数.测试结果表明,该系统高效灵活,具有较好的扩展性和兼容性,同时提供良好的用户操作界面,对智能车领域的发展具有重大意义.%By applying sensor and the technology of NI myRIO and LabVIEW integrally,intelligent obstacle avoid-ance vehicle with both smart action and manual control mode based on LabVIEW and NI myRIO were designed and completed. NI myRIO sensor collects parameters of obstacle distance,car moving speed and the presence of obstacles in front of the car and transmits data to PC via on-board WiFi module. Above mentioned parameters were dynamically displayed and stored by the user interface written by LabVIEW. The testing results indicated that the system was of great significance for the development of smart car field with its highly efficient,flexible,extensible and compatible feature and user friendly interface.【期刊名称】《电子器件》【年(卷),期】2018(041)002【总页数】6页(P543-548)【关键词】智能小车;NImyRIO;LabVIEW;无线监控;传感器【作者】李立;孙龙建【作者单位】安阳工学院电子信息与电气工程学院,河南安阳455000;安阳工学院电子信息与电气工程学院,河南安阳455000【正文语种】中文【中图分类】TP242.6当今全世界已进入智能时代的探索和发展,将生活中能够与芯片和电脑连接在一起的事物构建一种控制联系方式,采用IOT(Internet of Things)技术来方便人的生活。
《2024年基于Arduino的智能小车自动避障系统设计与研究》范文

《基于Arduino的智能小车自动避障系统设计与研究》篇一一、引言随着科技的进步和物联网的快速发展,智能小车作为一种集成了多种先进技术的产品,在日常生活和工业生产中得到了广泛的应用。
其中,自动避障系统是智能小车的重要功能之一,它能够使小车在复杂的环境中自主导航,避免障碍物,提高小车的安全性和实用性。
本文将介绍一种基于Arduino的智能小车自动避障系统的设计与研究。
二、系统设计1. 硬件设计本系统采用Arduino作为主控制器,搭配超声波测距模块、电机驱动模块、舵机等硬件设备。
其中,超声波测距模块用于检测前方障碍物的距离,电机驱动模块用于控制小车的行进和转向,舵机则用于调整小车的行驶方向。
具体设计如下:(1)Arduino主控制器:负责接收超声波测距模块的信号,处理数据并输出控制指令。
(2)超声波测距模块:安装在小车前方,通过发射超声波并检测反射回来的时间,计算与障碍物的距离。
(3)电机驱动模块:接收Arduino的指令,控制电机的正反转和转速,从而控制小车的行进和转向。
(4)舵机:根据Arduino的指令,调整小车的行驶方向。
2. 软件设计软件设计主要包括Arduino程序的编写和上位机界面的开发。
Arduino程序负责读取超声波测距模块的数据,处理数据并输出控制指令;上位机界面则用于实时显示小车的状态和障碍物的距离,方便用户进行控制和调试。
具体流程如下:(1)初始化硬件设备,包括Arduino、超声波测距模块、电机驱动模块等。
(2)通过Arduino读取超声波测距模块的数据,判断前方是否有障碍物。
(3)如果有障碍物,根据距离的远近和小车的行驶状态,计算控制指令并输出给电机驱动模块和舵机。
(4)上位机界面实时显示小车的状态和障碍物的距离,方便用户进行控制和调试。
三、系统实现与测试1. 系统实现根据上述设计,我们搭建了智能小车自动避障系统的硬件和软件环境,并进行了程序编写和调试。
在调试过程中,我们不断优化程序和硬件设备,确保系统的稳定性和可靠性。
(毕业论文设计)智能超声波避障小车的设计与制作(可编辑)
(毕业论文)智能超声波避障小车的设计与制作江阴职业技术学院项目设计报告项目超声波避障小车的设计与制作专业学生班级学号指导教师完成日期摘要智能小车是一种能够通过编程手段完成特定任务的小型化机器人它具有制作成本低廉电路结构简单程序调试方便等优点由于具有很强的趣味性智能小车深受广大机器人爱好者以及高校学生的喜爱本论文介绍的是具有自动避障功能的智能小车的设计与制作以下简称智能小车论文对智能小车的方案选择设计思路以及软硬件的功能和工作原理进行了详细的分析和论述经实践验收测试该智能小车的电路结构简单调试方便系统反映快速灵活设计方案正确可行各项指标稳定可靠AbstractSmart cars can be programmed to perform a specific task means the miniaturization of robot it has to make cost is low circuit simple structure convenient program test Because of it has strong interest intelligent robot car favored by the majority of the university students enthusiasts and love This paper introduces the is a automatic obstacle avoidance function of intelligent car design and production hereinafter referred to as the smart car the thesis to the intelligence of the car scheme selection design idea and the implementation of hardware and software function and working principle of a detailed analysis and discusses After practice acceptance test this intelligent car circuit structure is simple convenientdebug fast flexible system reflect correct and feasible design scheme each index is steady and reliable目录摘要IAbstract II目录III第一章绪论 111项目研究背景及意义 112项目主要研究容113设计思路114应用场合和功能2第二章总体方案 321总体方案概述 322 总体电路原理图 3第三章各模块功能介绍 431障碍物测距系统432显示模块533驱动模块1034电源模块12第四章软件设计1341 程序设计流程图1342 关键程序设计14第五章系统调试1751 调试的思路 1752 各模块的调试1753 调试心得19第六章结论与展望2061 结论 2062 展望 20致谢21参考资料22附录 231元器件清单232样机实物照片243电路原理图25相关程序26第一章绪论11项目研究背景及意义智能作为现代社会的新产物是以后的发展方向他可以按照预先设定的模式在一个特定的环境里自动的运作无需人为管理便可以完成预期所要达到的或是更高的目标本设计主要体现多功能小车的智能模式设计中的理论方案分析方法及特色与创新点等可以为自动运输机器人采矿勘探机器人家用自动清洁机器人等自动半自动机器人的设计与普及有一定的参考意义同时小车可以作为玩具的发展对象为中国玩具市场技术含量的缺乏进行一定的弥补实现经济收益形成商业价值超声波作为智能车避障的一种重要手段以其避障实现方便计算简单易于做到实时控制测量精度也能达到实用的要求在未来汽车智能化进程中必将得到广泛应用我国作为一个世界大国在高科技领域也必须占据一席之地未来汽车的智能化是汽车产业发展必然的在这种情况下研究超声波在智能车避障上的应用具有深远意义这将对我国未来智能汽车的研究在世界高科技领域占据领先地位具有重要作用本智能小车系统最诱人的前景就是可用于未来的智能汽车上了当驾驶员因疏忽或打瞌睡时这样的智能汽车的设计就能体现出它的作用如果汽车偏离车道或距障碍物小于安全距离时汽车就会发出警报提醒驾驶员注意如果驾驶员没有及时作出反应汽车就会自动减速或停靠于路边这样的小车还可以用于月球探测等的无人探月车帮助我们传达月球上更多的信息让我们更加的了解月球为将来登月做好充分准备这样的小车在科学考察探测车上也有广阔的应用前景在科学考察中有很多危险且人们无法涉足的地方这时智能科学考察车就能够派上用场在它上面装上摄像机代替人们进行许多无法进行的工作12项目主要研究容本设计题目为智能避障小车设计主要研究小车的避障功能小车遇到障碍物时当距离障碍物大于40cmPWM信号自增驱动电机加速小车加速前进当小于30cm时PWM信号自减驱动电机减速小车减速前进并且小车采取相应的避障措施这里探测装置必不可少因为超声波在距离检测方面的较准确定位所以采用超声波传感器作为探测装置由于超声波遇到障碍物时发生像光一样的反射和散射在经过多次发射之后再回到超声波检测端口会产生较严重的路程差从而影响对距离的检测进而影响对障碍物的较准确定位通过软件部校准优化消除外部物理条件造成的误差从而达到对障碍物的较准确定位13设计思路直流电机PWM控制系统的主要功能包括实现对直流电机的加速减速并且可以调整电机的转速能够很方便的实现电机的智能控制主体电路即直流电机 PWM 控制模块这部分电路主要由 AT89S52 单片机的 IO 端口定时计数器外部中断扩展等控制直流电机的加速减速以及转弯并且可以调整电机的转速能够很方便的实现电机的智能控制其间是通过 AT89S52 单片机产生脉宽可调的脉冲信号并输入到L298 驱动芯片来控制直流电机工作的该直流电机 PWM 控制系统由以下电路模块组成设计控制部分主要由 AT89S52 单片机的外部中断扩展电路组成直流电机PWM控制实现部分主要由电机和 L298 直流电机驱动模块组成设计显示部分LCD 数码显示部分实现对超声波测的距离的实时显示14应用场合和功能应用场合智能小车是一种能够通过编程手段完成特定任务的小型化机器人它具有制作成本低廉电路结构简单程序调试方便等优点由于具有很强的趣味性智能小车深受广大机器人爱好者以及高校学生的喜爱同时在玩具的应用上深受小朋友的青睐功能本小车使用AT89S52单片机作为主控芯片它通过超声波测距来获取小车距离障碍物的距离并且用LED显示出来当小车与障碍物的距离大于40cm时小车会沿直线前进当小车与障碍物的距离小于30cm时小车转弯以避开障碍物并且此时蜂鸣器报警在避开障碍物后小车会沿直线前进第二章总体方案21总体方案概述本小车使用AT89S52单片机作为主控芯片它通过超声波测距来获取小车距离障碍物的距离并且用LCD显示出来当小车与障碍物的距离大于40cm时小车会沿直线前进当小车与障碍物的距离小于30cm时小车转弯以避开障碍物并且此时蜂鸣器报警在避开障碍物后小车会沿直线前进简要框图如图2-1图 21简要框图22 总体电路原理图第三章各模块功能介绍31障碍物测距系统方案一超声波视觉优点价格合理夜间不受影响易于多目标测量和分类分辨率好缺点测量围小对天气变化敏感不能直接测量距离算法复杂处理速度慢方案二激光雷达MMW雷达优点夜间不受影响不受灯光天气影响缺点对水灰尘灯光敏感价格贵探测障碍的最简单的方法是使用超声波传感器它是利用向目标发射超声波脉冲计算其往返时间来判定距离的算法简单价格合理所以我们选择超声波传感器超声波测距原理首先利用单片机输出一个40kHz的触发信号把触发信号通过TRIG管脚输入到超声波测距模块再由超声波测距模块的发射器向某一方向发射超声波在发射时刻的同时单片机通过软件开始计时超声波在空气中传播途中碰到障碍物返回超声波测距模块的接收器收到反射波后通过产生一个回应信号并通过ECHO脚反馈给单片机此时单片机就立即停止计时时序图如图1所示由于超声波在空气中的传播速度为340ms根据计时器记录的时间t就可以计算出发射点距障碍物的距离即S VT2通过单片机来算出距离图31超声波测距原理32显示模块方案一用LCD显示优点辐射小显示容多低耗能散热小显示的画面稳定不闪烁缺点不适合做图图像还原不好有可视围限制方案二用LED显示优点亮度高成本低缺点不能显示汉字显示容较少对于本课题的要求我们选择LCD实现功能显示容多低功耗显示画面稳定不闪烁硬件电路设计简单字符型液晶显示模块是一种专门用于显示字母数字符号等点阵式LCD目前常用161162202和402行等的模块下面以太阳人电子的1602字符型液晶显示器为例介绍其用法一般1602字符型液晶显示器实物如图图 3211602字符型液晶显示器1602LCD主要技术参数显示容量16×2个字符芯片工作电压4555V工作电流20mA 50V模块最佳工作电压50V字符尺寸295×435 W×H mm引脚功能说明1602LCD采用标准的14脚无背光或16脚带背光接口各引脚接口说明如表所示编号符号引脚说明编号符号引脚说明 1 VSS 电源地9 D2 数据 2 VDD 电源正极10 D3 数据 3 VL 液晶显示偏压11 D4 数据4 RS 数据命令选择12 D5 数据 5 RW 读写选择 13 D6 数据 6 E 使能信号 14 D7 数据7 D0 数据15 BLA 背光源正极8 D1 数据16 BLK 背光源负极表-2-1引脚接口说明表第1脚VSS为地电源第2脚VDD接5V正电源第3脚VL为液晶显示器对比度调整端接正电源时对比度最弱接地时对比度最高对比度过高时会产生鬼影使用时可以通过一个10K 的电位器调整对比度第4脚RS为寄存器选择高电平时选择数据寄存器低电平时选择指令寄存器第5脚RW为读写信号线高电平时进行读操作低电平时进行写操作当RS和RW共同为低电平时可以写入指令或者显示地址当RS为低电平RW为高电平时可以读忙信号当RS为高电平RW为低电平时可以写入数据第6脚E端为使能端当E端由高电平跳变成低电平时液晶模块执行命令第7~14脚D0~D7为8位双向数据线第15脚背光源正极第16脚背光源负极1602LCD的指令说明及时序1602液晶模块部的控制器共有11条控制指令如表-2-2所示序号指令RS RW D7 D6 D5 D4 D3 D2 D1 D0 1 清显示0 0 0 0 0 0 0 0 0 1 2 光标返回0 0 0 0 0 0 0 0 1 3 置输入模式00 0 0 0 0 0 1 ID S 4 显示开关控制0 0 00 0 0 1 D C B 5 光标或字符移位 0 0 0 0 01 SC RL 6 置功能0 0 0 0 1 DL N F7 置字符发生存贮器地址 0 0 0 1 字符发生存贮器地址8 置数据存贮器地址0 0 1 显示数据存贮器地址9 读忙标志或地址 0 1 BF 计数器地址10 写数到CGRAM或DDRAM 1 0 要写的数据容11 从CGRAM或DDRAM读数 1 1 读出的数据容表-2-2控制命令表1602液晶模块的读写操作屏幕和光标的操作都是通过指令编程来实现的说明1为高电平0为低电平指令1清显示指令码01H光标复位到地址00H位置指令2光标复位光标返回到地址00H指令3光标和显示模式设置 ID光标移动方向高电平右移低电平左移 S屏幕上所有文字是否左移或者右移高电平表示有效低电平则无效指令4显示开关控制 D控制整体显示的开与关高电平表示开显示低电平表示关显示 C控制光标的开与关高电平表示有光标低电平表示无光标 B控制光标是否闪烁高电平闪烁低电平不闪烁指令5光标或显示移位 SC高电平时移动显示的文字低电平时移动光标指令6功能设置命令 DL高电平时为4位总线低电平时为8位总线 N低电平时为单行显示高电平时双行显示 F 低电平时显示5x7的点阵字符高电平时显示5x10的点阵字符指令7字符发生器RAM地址设置指令8DDRAM地址设置指令9读忙信号和光标地址 BF为忙标志位高电平表示忙此时模块不能接收命令或者数据如果为低电平表示不忙指令10写数据指令11读数据与HD44780相兼容的芯片时序表如下读状态输入RS LRW HE H 输出D0D7 状态字写指令输入RS LRW LD0D7 指令码E 高脉冲输出无读数据输入RS HRW HE H 输出D0D7 数据写数据输入RS HRW LD0D7 数据E 高脉冲输出无表-2-3基本操作时序表读写操作时序如图和所示图 322 读操作时序图 323 写操作时序33驱动模块方案一采用ULN2003驱动它是由7组达林顿晶体管阵列和相应的电阻网络以及钳位二极管网络构成具有同时驱动7组负载的能力一般用于高速大功率驱动电路所以我们不采用这个方案方案二采用由双极性管组成的H桥电路L298N用单片机控制晶体管使之工作在占空比可调的开关状态精确调整电机转速这种电路由于工作在管子的饱和截止模式下则效率非常高H桥电路保证了可以简单地实现转速和方向的控制电子开关的速度很快稳定性也很高而且它有更强的驱动能力L298N有过电流保护功能当出现电机卡死时可以保护电路和电机等L298N有过电流保护功能当出现电机卡死时可以保护电路和电机等所以我们选择L298N下图为L298部图图33L298部原理图L298各引脚功能如下表引脚功能115 SEN1SEN2 分别为两个H桥的电流反馈脚不用时可以接地23 1Y11Y2 输出端与对应输入端IN1IN2同逻辑 4 VS 驱动电压最小值需比输入的低电平电压高25V 57 IN1IN2 输入端TTL电平兼容611 EN1EN2 使能端低电平禁止输出8 GND 地9 VSS 逻辑电源457V 1012 IN3IN4 输入端TTL电平兼容1314 2Y12Y2 输出端与对应输入端IN3IN4同逻辑表3-3-1 封装引脚及功能驱动电机的运行IO端口状态与电机制动对照表如下IN1 IN2 IN3 IN4 EN1 EN2 转速 1 0 1 01 1 正转0 1 0 1 1 1 反转 1 1 1 1 11 停止0 0 0 0 1 1 停止X X X X 0 0停止表3-3-2 IO端口状态与电机制动对照表34电源模块我们选择采用5v的独立的稳压电源优点稳定可靠且有各种成熟电路可供选用缺点各模块都采用独立电源会使系统复杂且可能影响电路电平综合电源模块的缺优点和电路的实际需求我们采用了两块独立稳压电源一块给小车的电机驱动供电一块给小车的芯片供电这样弥补了单个独立电源供电出现电力不足的情况第四章软件设计41 程序设计流程图本设计系统软件采用模块化结构由主程序、定时子程序电机驱动子程序、中断子程序显示子程序、算法子程序构成主程序流程图如图41所示图 41主程序流程图42 关键程序设计PWM产生程序设计void Timer2 void interrupt 5TF2 0RCAP2H 0x0feRCAP2L 0x33clickif click 100 click 0if click ZK1PWM1 1elsePWM1 0if click ZK2 PWM2 1elsePWM2 02超声波的发射与接受程序设计void zd3 interrupt 3TH1 0x0f8TL1 0x30timerif timer 200timer 0TX 1_nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop_TX 031602的初始化程序的设计void ini_lcd1602write_lcd1602 0x380delay 1write_lcd1602 0x0c0delay 1write_lcd1602 0x060delay 1write_lcd1602 0x010delay 141602的写程序的设计void write_lcd1602 uchar cmduchar ilcd_mangrs irw 0e 0_nop__nop_e 1_nop__nop_P0 cmd_nop__nop__nop__nop_e 051602的判忙程序的设计void lcd_mangrs 0rw 1e 1_nop__nop__nop__nop_while P00x80e 0第五章系统调试51 调试的思路本设计的智能避障小车一共分为四大模块分别是L298驱动模块超声波测距模块LCD显示模块以及蜂鸣器报警模块调试的时候我们可以把四大模块分别调试最后再把所有模块组合起来再进行最后的整机调试这样一个调试的思路52 各模块的调试521 LCD的调试首先根据电路图将显示模块焊好再用万用表检查电路是否出现短路一切都正常的情况下将LCD测试程序烧到芯片中观察LCD的显示是否正确如图521一开始可能什么都不显示这个时候我们只需调整LCD 3脚的变阻器阻值即可图 521LCD测试图522 超声波的调试超声波模块一共有四个脚一个是VCC一个是GND还有两个分别是超声波的发射和接收引脚连接电路时候只需引出四根插线分别连接到89S52的对应引脚烧制好测试程序测试结果图如522本设计四根插线分别连接到VCCGND还有发射和接收引脚分别为P30和P32口图 522超声波测试图523 蜂鸣器报警调试蜂鸣器的连接很简单只需用一个PNP管来做驱动当低电平到来时蜂鸣器发出声音当高电平到来时没有声音本设计中蜂鸣器连接到P34口如图523所示图523蜂鸣器报警电路53 调试心得通过系统的调试我们可以学到更多的知识我们也可以发现仿真和实物调试不同的地方程序设计的结果可能往往和实物调试出的结果不一样这就需要我们去思考去斟酌去改进以达到预期效果通过程序和硬件的调试我们可以更深刻的理解各功能模块之间的联系也可以明白各调试的步骤在调试的过程中我也遇到许多问题例如我在宿舍调试好小车之后带到班级时候在插上电源试图让小车跑起来时候发现超声波模块失去了作用LCD不再显示数据了后来我用电脑USB口供电发现也不可以检查了许久才发现是超声波模块上的电源线和地线的两根插线出现了断路换线之后LCD正常显示数值小车正常行驶整个调试过程需要硬件和软件结合起来调试要仔细检查电路认真思考程序硬件部分调试的步骤检查原理图连接是否正确用万用表检查是否有虚焊引脚短路现象检查原理图与上引脚是否一致680欧的电阻焊成了68千欧这使我深深感受到理论与实际间的差距在调试过程中发现插上编程器后不能烧制程序通过检查电路发现AT89S52芯片的使能端没有接VCC改好之后重新烧制发现还是不可以通过再次检查发现是共阴管的驱动芯片74LS245的引脚出现焊接错误通过这些调试提高了我检查电路的能力以及巩固了电路图的知识通过这样的设计提高了我的动手能力每天在实验室除了焊接线路板还可以上机编程使我软件调试知识也提高了本设计采用的是89S52单片机这主要是因为该单片机的稳定性比较好还可以采用其它系列的单片机比如采用陵阳单片机就可以简化编程但其稳定性不是很好62 展望1在本课题的基础上我们可以在小车的底座下面装一个吸尘装置这样就可以在小车行驶的过程中吸除一些预先放好的小纸屑2设计出两辆小车一辆小车放在另一辆的前面当前面一辆小车起动时候后面一辆小车也起动前面一辆小车转弯的时候后面一辆也跟着转弯前面一辆小车停止时后面一辆也跟着停止致谢历时三个月的毕业设计已经告一段落经过自己不断的搜索努力以及白老师的耐心指导和热情帮助本设计已经基本完成在这段时间里白老师严谨的治学态度和热忱的工作作风令我十分钦佩他的指导使我受益非浅通过这次毕业设计使我深刻地认识到学好专业知识的重要性也理解了理论联系实际的含义并且检验了大学四年的学习成果虽然在这次设计中对于知识的运用和衔接还不够熟练但是我将在以后的工作和学习中继续努力不断完善这三个月的设计是对过去所学知识的系统提高和扩充的过程为今后的发展打下了良好的基础由于自身水平有限设计中一定存在很多不足之处敬请各位老师批评指正参考资料1 负图传感器集成电路手册第一版化学工业2004590~5912华MCS-51系列单片机实用接口技术第三版1997年3红润实用自动控制科技大学1990年1月4康华光电子技术基础高等教育1983年10月5潘新民微型计算机控制技术人民邮电技术1988年3月6依军单片机微型接口技术人民邮电技术1989年3月7广弟单片机基础航空航天大学20018汉才单片机原理及其接口技术清华大学19969王毅单片机器件应用手册人民邮电1995附录1元器件清单序号元件名称数量参数 1 AT89S52单片机12 超声波模块 13 L298n 14 智能避障小车底盘 15 蜂鸣器 16 LCD液晶屏 1 2样机实物照片3电路原理图相关程序includeincludedefine uchar unsigned chardefine uint unsigned intunsigned char isbit rs P26 定义引脚sbit rw P25sbit e P27sbit TX P30 触发信号引脚sbit FM P34sbit PWM1 P36 pwm信号输出sbit PWM2 P37static char click 0unsigned char ZK1ZK2unsigned int time 0unsigned int timer 0unsigned long Sbit flag 0unsigned char code ASCII[19] 0123456789-MJU LI static unsigned char DisNum 0 显示用指针unsigned long S 0unsigned char disbuff[11] 0void Conut voidtime TH0256TL0TH0 0TL0 0S time17 100disbuff[0] 13disbuff[1] 14disbuff[2] 15disbuff[3] 16disbuff[4] 17disbuff[5] 18disbuff[6] S1000100disbuff[7] 10disbuff[8] S100010010disbuff[9] S100010 10disbuff[10] 12void delay_1 void 误差 0usunsigned char abfor b 215b 0b--for a 45a 0a--void delay uchar auchar iwhile a--for i 0i 250i_nop__nop__nop__nop_判忙void lcd_mangrs 0rw 1e 1_nop__nop__nop__nop_while P00x80e 01602的写void write_lcd1602 uchar cmduchar i 当i为0的时候为向1602写指令为1写数据lcd_mangrs irw 0e 0_nop__nop_e 1_nop__nop_P0 cmd_nop__nop__nop__nop_e 01602的初始化void ini_lcd1602write_lcd1602 0x380delay 1write_lcd1602 0x0c0delay 1write_lcd1602 0x060delay 1write_lcd1602 0x010delay 1void Timer2InterruptRCAP2H 0x0feRCAP2L 0x33ET2 1 允许T2定时器中断EA 1 打开总中断TR2 1 启动T2定时器void zd0 interrupt 1flag 1void zd3 interrupt 3 T1中断用来扫描数码管和计800MS启动模块TH1 0x0f8TL1 0x30timerif timer 200timer 0TX 1 800MS 启动一次模块_nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop__nop_TX 0void Timer2 void interrupt 5TF2 0 T2定时器发生溢出中断时需要用户自己清除溢出标记RCAP2H 0x0feRCAP2L 0x33 恢复定时器初始值clickif click 100 click 0if click ZK1PWM1 1elsePWM1 0if click ZK2 PWM2 1elsePWM2 0主函数void mainTMOD 0x19 设T0为方式1GATE 1 TH0 0TL0 0TH1 0x0f8 2MS定时TL1 0x30ET0 1 允许T0中断ET1 1 允许T1中断TR1 1 开启定时器Timer2InterruptEA 1 开启总中断ZK1 20ZK2 20ini_lcd1602while 1while INT0 0 当RX为零时等待TR0 1while INT0 1 当RX为1计数并等待TR0 0 关闭计数Conut 计算if S 40 控制加速FM 1P1 0xafZK1 ZK1-5ZK2 ZK2-5elseif S 30 控制转向FM 0ZK1 ZK15ZK2 ZK25P1 0X8Fdelay_1if ZK1 99 ZK1 1if ZK1 1 ZK1 10if ZK2 99 ZK2 1if ZK2 1 ZK2 10write_lcd1602 0x800for i 0i 10iwrite_lcd1602 ASCII[disbuff[i]]1- III -- 31 -。
基于Matlab和Arduino的智能循迹小车的设计
工业自动化学院《智能玩具及机器人专业实训》报告(201 -201 学年第学期)课程实训题目:智能寻迹小车的设计姓名:学号:班级:指导老师:***时间:成绩:目录一、课程设计性质和目的 (3)二、课程设计的内容及要求 (4)三、课程设计的进度及安排 (5)四、设计所需设备及材料 (6)1. 传感器原理 (6)2. L298N电机驱动模块 (7)五、设计思路及原理分析 (8)六、控制系统建模 (9)1. 安装arduino支持包 (9)2. 控制逻辑分析 (11)3. Simulink建模 (11)七、调试运行 (13)1. 测试传感器 (13)2. 电机驱动模块的调试 (14)3. 整体调试 (14)八、结果及分析 (15)九、心得体会 (16)十、参考文献 (17)十一、致谢 (18)十二、附录 (19)一、课程设计性质和目的智能玩具及机器人专业实训是《智能玩具设计》课程与实验结束后的一门综合性实践课。
所选题目《智能寻迹车》紧密结合所学的主要内容,加深巩固所学知识,同时对所学内容进行扩展,有一定的深度和广度,能充分发挥学生的能动性和想象力。
通过设计、安装、调试等一系列环节的实施,提高学生利用matlab 进行控制系统设计的能力。
二、课程设计的内容及要求设计要求可分为两大部分:寻迹车的设计和控制算法的设计。
1、寻迹车的设计(1)组装寻迹小车底盘;(2)光电传感器电路设计;(3)电机驱动器、控制器、电池组、电源、传感器布局。
硬件平台:Arduino MEGA2560、智能车底板、轮子、轴联器、L支架、金属减速电机、智能车万向轮、直流电机驱动器、移动电源、电池组、光电传感器等。
2、控制算法的设计(1)根据功能要求确定控制思路;(2)在matlab/simulink平台中建立寻迹车控制系统模型。
软件平台:Windows XP;MatlabR2013a;Simulink Support Package for Arduino Hardware;Arduino IDE。
基于LABVIEW的视频监控智能小车机器人系统设计
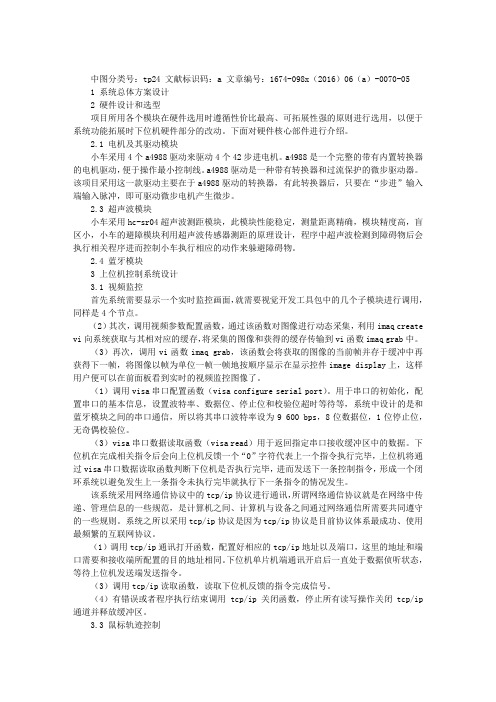
中图分类号:tp24 文献标识码:a 文章编号:1674-098x(2016)06(a)-0070-051 系统总体方案设计2 硬件设计和选型项目所用各个模块在硬件选用时遵循性价比最高、可拓展性强的原则进行选用,以便于系统功能拓展时下位机硬件部分的改动。
下面对硬件核心部件进行介绍。
2.1 电机及其驱动模块小车采用4个a4988驱动来驱动4个42步进电机。
a4988是一个完整的带有内置转换器的电机驱动,便于操作最小控制线。
a4988驱动是一种带有转换器和过流保护的微步驱动器。
该项目采用这一款驱动主要在于a4988驱动的转换器,有此转换器后,只要在“步进”输入端输入脉冲,即可驱动微步电机产生微步。
2.3 超声波模块小车采用hc-sr04超声波测距模块,此模块性能稳定,测量距离精确,模块精度高,盲区小,小车的避障模块利用超声波传感器测距的原理设计,程序中超声波检测到障碍物后会执行相关程序进而控制小车执行相应的动作来躲避障碍物。
2.4 蓝牙模块3 上位机控制系统设计3.1 视频监控首先系统需要显示一个实时监控画面,就需要视觉开发工具包中的几个子模块进行调用,同样是4个节点。
(2)其次,调用视频参数配置函数,通过该函数对图像进行动态采集,利用imaq create vi向系统获取与其相对应的缓存,将采集的图像和获得的缓存传输到vi函数imaq grab中。
(3)再次,调用vi函数imaq grab,该函数会将获取的图像的当前帧并存于缓冲中再获得下一帧,将图像以帧为单位一帧一帧地按顺序显示在显示控件image display上,这样用户便可以在前面板看到实时的视频监控图像了。
(1)调用visa串口配置函数(visa configure serial port)。
用于串口的初始化,配置串口的基本信息,设置波特率、数据位、停止位和校验位超时等待等,系统中设计的是和蓝牙模块之间的串口通信,所以将其串口波特率设为9 600 bps,8位数据位,1位停止位,无奇偶校验位。
基于labVIEW控制的智能小车设计

基于labVIEW控制的智能小车设计[摘要] 本设计主要开发以小车为控制对象,以单片机为控制平台,驱动直流电机使小车左转或右转,小车轮速由pwm信号控制,上位机通过无线模块向小车发送控制命令,控制系统由labview8.5搭建,labview8.5在线控制小车转向,车轮转速等控制算法,以达到预计的控制效果的智能小车。
[关键字]单片机 pwm labview8.5 智能小车中图分类号:tp249 文献标识码:a 文章编号:1009-914x(2013)17-600-02本设计通过计算机编程来实现其智能小车对行驶方向、启停以及速度的控制,通过上位机发送模块、无线传输模块、下位机接收模块等,人为在线远程控制小车的运行状态。
1 总体设计方案设计主要以labview8.5为开发平台,选择常见的直流电机玩具车为机械平台,结合串口通信、单片机控制与通信、无线通信、电机控制等相关知识实现小车的各种功能。
由上位机中的labview8.5发送控制命令,界面设定有前进,后退,左转,右转,左前,左后,右前,右后,加速,减速的按钮。
经过rs232电平转换后连接到发送数据的单片机,发送单片机接受到控制命令,将信号传送给无线模块发送端,此时无线模块通过无线传输,将信号发送给无线模块的接收端,再将信号传送给小车上的接收数据单片机,此单片机解析信号后实现转速控制,转向控制。
两台直流电机,一台在前轮,用来控制小车转弯,另一台在后轮,用来控制小车的转速,用pwm 信号控制[2]。
系统总框图如图1所示。
2系统硬件设计2.1 电机模块设计采用直流电机,只需给电机的两根控制线加上适当的电压即可使电机转动起来,电压越高则电机转速越高,改变正负极就能改变电机转动方向,从而改变小车的行进状态。
对于直流电机的速度调高,可用改变电压的方法,也可采用pwm调速方法。
pwm调速是使加在直流电机两端的电压为方波形式,改变方波的占空比进行电机转速的调节。
电机驱动模块采用l298n和bts7960相结合的方式,l298n内部有两个h桥,因为本设计中小车后轮电机的电压比较大,用l298n 驱动使芯片发热,故用l298n中一个h桥驱动前轮电机,控制小车的转向,用bts7960驱动后轮电机并用pwm调速。
循迹避障智能小车的实验设计

循迹避障智能小车的实验设计本实验旨在设计和实现一个能够循迹避障的智能小车,通过实践验证其实验设计方案是否可行。
通过本实验,希望能够提高小车的自动化水平,使其能够在复杂的路径环境中自主运行。
循迹避障智能小车:实验所用的智能小车需具备循迹和避障功能。
传感器:为了实现循迹和避障功能,我们需要使用多种传感器,如红外线传感器、超声波传感器等。
电路:实验中需要搭建的电路包括电源电路、传感器接口电路和控制器电路等。
编程软件:采用主流的编程语言如Python或C++进行编程,实现对小车的控制和传感器数据的处理。
搭建电路:根据设计要求,完成电源电路、传感器接口电路和控制器电路的搭建。
安装传感器:将红外线传感器和超声波传感器安装在小车上,并与电路连接。
编程设定:使用编程软件编写程序,实现小车的循迹和避障功能。
调试与优化:完成编程后进行小车调试,针对实际环境进行调整和优化。
通过实验,我们成功地实现了小车的循迹避障功能。
在实验过程中,小车能够准确地跟踪预设轨迹,并在遇到障碍物时自动规避。
实验成功的主要因素包括:正确的电路设计、合适的传感器选型、高效的编程实现以及良好的调试与优化。
在实验过程中,我们发现了一些需要改进的地方,例如传感器的灵敏度和避障算法的优化。
为了提高小车的性能,我们建议对传感器进行升级并改进避障算法,使其能够更好地适应复杂环境。
通过本次实验,我们验证了循迹避障智能小车实验设计方案的有效性。
实验结果表明,小车成功地实现了循迹避障功能。
在未来的工作中,我们将继续对小车的性能进行优化,以使其在更复杂的环境中表现出更好的性能。
本实验的设计与实现对于智能小车的应用和推广具有一定的实际意义和参考价值。
随着科技的不断发展,智能小车已经成为了研究热点之一。
避障循迹系统是智能小车的重要组成部分,它能够使小车自动避开障碍物并按照预定的轨迹行驶。
本文将介绍一种基于单片机的智能小车避障循迹系统设计,该设计具有简单、稳定、可靠等特点,具有一定的实用价值。
《2024年基于Arduino的智能小车自动避障系统设计与研究》范文

《基于Arduino的智能小车自动避障系统设计与研究》篇一一、引言随着科技的进步和物联网的飞速发展,智能小车已成为现代社会中不可或缺的一部分。
其中,自动避障系统是智能小车的重要功能之一。
本文将详细介绍基于Arduino的智能小车自动避障系统的设计与研究,包括系统架构、硬件设计、软件设计、实验结果及未来展望等方面。
二、系统架构本系统采用Arduino作为主控制器,通过超声波测距模块、红外线传感器等硬件设备实现自动避障功能。
系统架构主要包括传感器模块、Arduino主控制器模块、电机驱动模块以及电源模块。
其中,传感器模块负责检测障碍物距离和位置信息,Arduino 主控制器模块负责数据处理和逻辑控制,电机驱动模块负责驱动小车行驶,电源模块为整个系统提供稳定的工作电压。
三、硬件设计1. 超声波测距模块:本系统采用HC-SR04超声波测距模块,用于检测小车前方障碍物的距离。
该模块具有测量范围广、精度高、抗干扰能力强等优点。
2. 红外线传感器:红外线传感器用于检测小车周围的环境信息,如道路边缘、其他车辆等。
本系统采用反射式红外线传感器,具有灵敏度高、响应速度快等优点。
3. Arduino主控制器:本系统采用Arduino UNO作为主控制器,具有开发便捷、性能稳定等优点。
4. 电机驱动模块:本系统采用L298N电机驱动模块,用于驱动小车的行驶。
该模块具有驱动能力强、控制精度高等优点。
5. 电源模块:本系统采用可充电锂电池作为电源,为整个系统提供稳定的工作电压。
四、软件设计本系统的软件设计主要包括传感器数据采集与处理、路径规划与控制算法实现等方面。
具体设计如下:1. 传感器数据采集与处理:通过Arduino编程语言,实现对超声波测距模块和红外线传感器的数据采集与处理。
将传感器检测到的障碍物距离和位置信息传输至Arduino主控制器,进行数据处理和分析。
2. 路径规划与控制算法实现:根据传感器数据,采用合适的路径规划算法,如基于距离的避障算法、基于角度的避障算法等,实现小车的自动避障功能。
智能避障小车设计 毕业设计 完整版 附程序编程

上海交通大学毕业设计设计题目:智能避障小车设计系别:机电工程系班级:10测控技术与仪器(1)班姓名:XXX指导教师: XXX2014年6月8 日智能小车设计摘要随着近年来机器人的智能水平不断提高,其中机器人的感觉传感器种类越来越多,而视觉传感器成为自动行走和驾驶的重要部件。
智能小车可应用于无人工厂,仓库,服务机器人等领域解决一些高危环境下的难题。
同时单片机技术的迅速发展使得机器人的智能控制更加智能化,人性化。
该设计是利用光电传感器以一定的频率发射红外线来检测障碍物,然后将检测信号发送到STC89C52单片机,并以STC89C52单片机为控制芯片进而电动小汽车的速度及转向,以此实现自动避障的功能。
其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM波调速控制。
本设计结构简单,较容易实现,与实际相结合,现实意义很强,但具有高度的智能化、人性化,一定程度体现了智能。
关键词:智能小车; STC89C52单片机; L298N; PWM波Design Of Smart CarAbstractAlong with the robot's intelligent level rises ceaselessly, the types of robot sensory sensor are more and more, and the vision sensor have become the important part in the automatic walking and driving .Smart car can be applied to unmanned factory, warehouse, service robot and etc. to solve some high risk environment problems,At the same time,The rapid development of MCS technology makes the intelligent control of robot more intelligent ang humane.This design uses a photoelectric sensor sending a certain frequency transmitting infrared to detect obstacles, and then sends a detection signal to a STC89C52 MCS. While the car is drived by the L298N circuit, its speed is controlled by the output PWM signal from the STC89C52 MCS.This design is practical ,easy realization and simple in the structure, but highly intelligent, humane, Intelligent in some degree.Key words:Smart Car; STC89C52 MCS; L298N; PWM Signa目录1引言 (1)1.1课题背景 (1)1.2论文的研究任务与内容 (2)2方案设计与论证 (3)2.1主控系统 (3)2.2直流调速系统 (4)2.3检测系统 (5)2.4电机驱动系统 (6)2.5 机械系统 (8)2.6电源模块 (9)3硬件设计 (10)3.1总体设计 (10)3.1.189C52单片机硬件结构 (12)3.1.2单片机最小系统设计 (16)3.2避障模块 (18)3.3驱动电路 (19)3.4总控制系统 (23)4软件设计 (24)4.1程序设计 (24)4.1.1电机驱动程序 (24)4.1.2避障程序 (25)4.1.3电机调速程序 (28)5总结与展望 (32)致谢 (33)参考文献 (34)外文资料 (35)附录1程序清单 (40)附录2电路图 (53)1引言1.1课题背景机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,同时,为社会经济发展产生了一个重大影响的一门科学技术,它的发展归功于在第二次世界大战中各国加强了经济的投入,就加强了本国的经济的发展。
智能循迹避障声控小车设计__毕业设计
智能循迹避障声控小车设计__毕业设计毕业设计报告摘要:本文主要介绍了一种智能循迹避障声控小车的设计方案。
该小车通过声音的控制实现前进、后退、转向等操作,并能够通过红外线传感器实时地检测到前方的障碍物,并做出相应的避障操作。
此外,小车还具备循迹功能,能够通过线性二分法实现按照指定的线路行进。
整个系统的设计基于Arduino控制平台和相关的传感器模块,通过编程实现各功能的控制和算法的运行。
实验结果表明,该小车能够稳定地完成循迹避障和声控的功能,具有较高的可靠性和灵活性。
关键词:智能小车,循迹,避障,声控,Arduino一、引言随着计算机技术和电子技术的发展,智能小车成为了人们关注的焦点之一、智能小车运用到了很多新的技术,如声控、避障、循迹等,为人们的生活带来了很多便利。
基于此,本文设计了一种智能循迹避障声控小车,通过声音的控制和红外线传感器的检测,实现了小车的前进、后退、转向、避障等功能,并通过循迹实现了指定线路的行进。
二、设计方案2.1硬件设计本设计使用Arduino控制平台作为主控制器,通过连接相关的传感器模块实现各个功能的控制和检测。
具体的硬件设计如下:1)Arduino主控制器:作为整个系统的核心,负责接收声音控制和传感器信号,控制电机进行驱动。
2)声音传感器:通过检测声音的强度和频率,判断用户的操作指令,并将指令传递给Arduino主控制器。
3)红外线传感器:安装在小车前方,实时检测到前方的障碍物并发出信号,通知Arduino主控制器避障。
4)电机驱动模块:负责驱动小车的电机进行前进、后退、转向等操作。
2.2软件设计软件设计主要基于Arduino编程语言,实现各功能的控制和算法的运行。
具体的软件设计如下:1)声控部分:通过编写声音控制的代码,实时接收声音传感器的声音强度和频率,并根据预设的阈值匹配相应的操作指令,将指令传递给电机驱动模块进行实际操作。
2)避障部分:通过编写红外线传感器的代码,实时检测到前方的障碍物,并根据检测结果进行相应的避障操作,如后退、转向等。
基于NI myrio控制的智能循迹车的设计
基于NI myrio控制的智能循迹车的设计◎王博随着科学技术的发展,机器人的设计越来越精细,功能越来越复杂特别是服务型机器人,智能循迹车作为在现实中被广泛应用,在不断创新发展。
关于小车的智能化功能的实现也多种多样,该设计的智能循迹车,除了能自动识别行走轨迹道路外,还增加了躲避障碍物的功能。
一、设计方案本设计主要有NI myrio控制器、传感器模块、运动模块以及电源模块组成,小车具有自动寻找轨迹的功能。
本次设计采用美国国家仪器有限公司(National In-struments,简称NI)的NI myrio作为控制芯片;传感器模块采用灰度传感器,能够准确识别轨迹路面、超声波传感器能够避开障碍物;运动模块采用带编码功能的直流电机;电源模块采用了两块24V锂电池组给系统供电,确保实现小车的自动循迹的功能。
1.N I myrio控制器。
本系统采用采用美国国家仪器有限公司(National Instru-ments,简称NI)的NI myrio作为控制芯片。
NI myRIO通过实时应用、FPGA、内置WiFi功能,可以远程编程控制应用,不用常规的远程电脑操作连接。
它有三个I/O 端口(两个MXP和一个与NI myDAQ接口相同的MSP端口,能够满足输入输出信号的处理,以支持该系统的搭建。
NI myRIO 共有40条数字I/O线,支持SPI、PWM输出、正交编码器输入、UART和I2C,以及8个单端模拟输入,2个差分模拟输入,4个单端模拟输出和2个对地参考模拟输出,方便通过编程控制连接各种传感器及外围设备。
NI myRIO能够最大限度的简化硬件设置,提供了专门的配置与设置工具,与NI Measurement&Automation Explorer (MAX)的配置功能不同。
但仍可通过MAX 进行设置、软件安装和其他高级设置等操作。
当设备连接到计算机时,NI myRIO的USB监控器自动运行。
编程软件采用图形化编程的Labview编程软件,图形化的编程语言,广泛地应用于工业界、学术界和各类研究实验室,可被视为一个标准的数据采集和仪器控制软件。
基于Labview的智能小车控制平台

基于Labview的智能小车控制平台摘要:该课程设计是基于Labview的智能汽车控制平台,该平台建立在飞思卡尔单片机及51单片机控制芯片基础上,基于Labview仿真。
采用无线控制小车转向,加速,刹车系统。
该设计是测控专业集单片机控制,电路,软件编程于一体的平台练习,是集测控专业所学的一门综合提高学生素质的课程设计。
关键词:Labview 智能汽车飞思卡尔单片机测控Abstract: the course is designed based on the intelligent vehiclecontrol platform Labview, this platform based on SCM and 51 single-chip microcomputer control freescale Labview, based on the chip. Using radiocontrol car accelerated, braking system, steering. This design is a professional sets single-chip microcomputer control, the control circuit and the software programming in one of the platform, which is a professional knowledge of measurement to improve students' comprehensive quality of the course design.Keywords:intelligent vehicle freescale microcontroller measure-control Labview一、单片机系统的组成1.改装原因:(1):市面上的游戏方向盘都是USB通信协议,用户不了解协议内容,无法用于自己控制要求。
基于labview的智能拖地小车系统设计
DOI :10.19392/j.cnki.1671-7341.201909004基于labview 的智能拖地小车系统设计余先哲韩剑*刘赛栋桂林电子科技大学信息科技学院广西桂林541004摘要:本系统设计通过单片机和传感器对车子进行自动辨别障碍物,从而判断汽车和障碍物之间的距离,从而来避免发生碰撞。
智能自动拖地小车包括避障、人工操控等功能,初步的实现小车的智能化,通过几个传感器检测周围的环境,来判断出前方是否有障碍物,再通过单片机来控制小车的运动方向,前进、转弯来对小车进行避障。
在通过时间的设定完成定时拖地工作,整个系统与上位机labview 开发的界面进行通信,人机界面良好。
关键词:labview ;智能化;避障;检测在工业生产和生活工作中,智能拖地小车能够根据预先设置的环境下自行进行工作、避障,不需要人为控制,就可以自行完成所要的目标。
随着智能化的快速发展,智能拖地小车实现使用传感器检测路线和障碍并作出判断和相应的执行动作,智能拖地小车会让人们的生活更加多姿多彩,带来更多的方便和添加生活乐趣。
1下位机硬件电路设计本设计的下位机以STC89C52RC 单片机为核心的控制系统,用几个设计模块相结合,用单片机主控模块,利用红外测距,进行避障功能。
通过硬件电路的设计,接着软件程序的编程来实现自动拖地小车的工作。
每个模块看似独立工作的,但其中各模块又能合作工作。
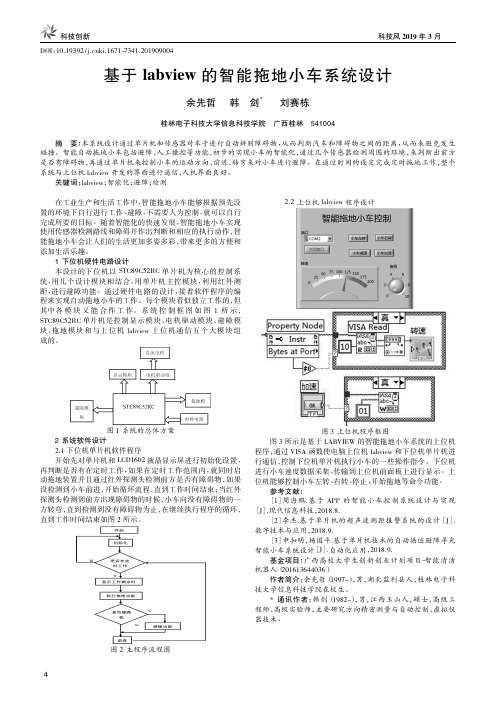
系统控制框图如图1所示,STC89C52RC 单片机是控制显示模块、电机驱动模块、避障模块、拖地模块和与上位机labview 上位机通信五个大模块组成的。
图1系统的总体方案2系统软件设计2.1下位机单片机软件程序开始先对单片机和LCD1602液晶显示屏进行初始化设置,再判断是否有在定时工作,如果在定时工作范围内,就同时启动拖地装置并且通过红外探测头检测前方是否有障碍物,如果没检测到小车前进,开始循环流程,直到工作时间结束;当红外探测头检测到前方出现障碍物的时候,小车向没有障碍物的一方转弯,直到检测到没有障碍物为止,在继续执行程序的循环,直到工作时间结束如图2所示。
基于LabVIEW的智能WiFi小车控制系统设计

基于LabVIEW 的智能WiFi 小车控制系统设计DOI :10.19557/ki.1001-9944.2020.12.005谢檬,曾泽辉,张安莉,石卓勇(西安交通大学城市学院电气与信息工程系,西安710018)摘要:针对无线智能小车控距较短,无法自动避障且功能单一等问题,设计了智能WiFi 小车虚拟控制系统。
以STM32F105单片机为主控芯片,构建智能小车的硬件系统,上位机采用LabVIEW 搭建控制平台,WiFi 模块完成数据的适时通信。
经过测试,该系统可以控制智能小车完成基本的运行功能;LED 灯光控制;云台舵机旋转角度范围0°~180°和35°~90°;超声波测距范围0~15cm ,精度±0.5cm 。
控制系统便捷地控制小车运行轨迹,有效降低了道路事故风险,提高行车效率,方便人们的生活。
关键词:控制系统;LabVIEW ;智能小车;WiFi ;STM32F105中图分类号:TP391.9;TP242.6文献标志码:A文章编号:1001⁃9944(2020)12⁃0022⁃04Design of Control System of Intelligent WiFi Car Based on LabVIEWXIE Meng ,ZENG Ze ⁃hui ,ZHANG An ⁃li ,SHI Zhuo ⁃yong(Department of Electrical and Information Engineering ,Xi ’an Jiaotong University City College ,Xi ’an 710018,China )Abstract :Aiming at the problems such as short control distance ,unable to avoid obstacles automatically and single function ,intelligent WiFi car virtual control system was designed.This system takes STM32F105as the main control chip of the hardware system ,the upper computer USES LabVIEW to build the control platform ,and the WiFi module to complete the data communication.The hardware system of intelligent trolley is built by using STM32F105single chip microcomputer as main control chip.The upper computer uses the LabVIEW to build the control platform ,and the WiFi module completes the data real ⁃time communication.After testing ,the system can control the intelligent car to complete the basic operation function ;the car LED light control ;pan tilt steering gear rotation angle range of 0°~180°and 35°~90°;the ultrasonic ranging range of 0~15cm ,the accuracy of ±0.5cm.The control system convenientlycontrols the track of the car ,effectively reduces the risk of road accident ,improves the driving efficiency ,and facili ⁃tates people ’s life.Key words :control system ;LabVIEW ;smart car ;WiFi ;STM32F105收稿日期:2020-08-29;修订日期:2020-10-07基金项目:教育部产学合作协同育人项目(201902028026);陕西省职业教育“1+X ”证书制度专项项目(ZJX02001)作者简介:谢檬(1982—),女,硕士,副教授,研究方向为测控技术与仪器及智能仪器的设计。
基于机器视觉的载货小车的设计与实现

基于机器视觉的载货小车的设计与实现作者:王波来源:《中国新通信》2021年第19期【摘要】本文介绍了一种基于机器视觉的嵌入式系统载货小车,使用了NI公司的嵌入式系统模块myRIO和图形编程语言Labview,与传统的C语言实现有所不同,具有一定的参考价值。
【关键词】嵌入式机器视觉 myRIO引言:随着信息化的发展,嵌入式系统技术无疑有了更广阔的发展空间。
嵌入式系统应用于我们日常生活中的各个领域。
嵌入式系统是一种可裁剪的系统,对实时响应程度较高,它必须根据实际系统的需求进行合理的裁剪使用,可以更好的降低成本。
NI公司的myRIO是一个集成的嵌入式模块,包含了一个嵌入式处理器和一个ZYNQ架构的FPGA。
我们利用一定的硬件,并结合Labview的视觉助手,可以比较容易的搭建出一个机器视觉模型。
本设计就采用了这样一种方案。
一、硬件设计该载货小车以基于Cortex-A9内核的myRIO为核心,外围电路包括一个电机驱动板,四个电机,以及一个摄像头,电源供电由12V直流锂电池供电,myRIO模块里有整流电路将12V转变为3.3V提供给Cortex-A9和FPGA。
基于Cortex-A9内核的myRIO程序控制,从摄像头获取图片,输出到myRIO,通过机器视觉算法判断出物体的颜色,并通过小车机械臂的抓取,实现货物的运输。
myRIO型号为NI myRIO-1900 ,其核心芯片是 Xilinx Zynq-7010,该芯片集成了 667 MHz 双核 ARM Cortex-A9 处理器以及包含 28K 逻辑单元、80 个 DSP slices、16 个 DMA 通道的FPGA。
摄像头采用普通高清USB摄像头,驱动板采用普通电机驱动板,本方案中采用的DIGILENT公司的Motor Adapter for NI myRIO电机驱动扩展板。
二、软件设计本载货小车实现从出发点出发,循迹到达货物存放区,根据机器视觉判断不同颜色的不同货物并获取,回到货物存放点将货物按颜色分类。
基于LabVIEW平台自主避障系统设计

基于LabVIEW平台自主避障系统设计薄明丽;张嘉琪;张春兰;孟祥杜;费学宁【摘要】为降低现代航海事故的发生率,设计了基于LabVIEW的仿真智能避让系统;该系统利用栅格-蚁群算法寻找最佳路径排除固定障碍物,并通过激光测距仪和陀螺仪避开随机障碍物的影响;同时利用LabVIEW开发上位机软件和下位机数据采集系统,最终达到与控制规则无缝连接的效果.经多次仿真模拟实验验证,该系统能够按照人类思维的最佳路径行走并有效地避开障碍物,实现船舶自主避障功能.【期刊名称】《海洋技术》【年(卷),期】2017(036)003【总页数】5页(P103-107)【关键词】LabVIEW;自主避障;栅格-蚁群算法;激光测距仪;陀螺仪【作者】薄明丽;张嘉琪;张春兰;孟祥杜;费学宁【作者单位】天津理工大学环境科学与安全工程学院,天津300384;天津理工大学环境科学与安全工程学院,天津300384;天津理工大学环境科学与安全工程学院,天津300384;天津理工大学环境科学与安全工程学院,天津300384;天津城建大学理学院,天津300384【正文语种】中文【中图分类】U666.11随着科学技术的迅猛发展,航海技术已经成为一个重要的研究领域,但船舶碰撞仍然是亟待解决的棘手问题。
在全球发生的已知海难中,40%以上是船舶碰撞事故,且我国海上交通碰撞事故已为多发国家,所以加强船舶的自主避障功能迫在眉睫。
虽然我国在船舶自主避障各个领域已经有了深入的研究,例如:南京航空航天大学孙兰兰采用避障控制算法引入模式控制理论[1];大连海事大学王哲通过建立无人艇自动避障决策仿真系统,实现无人艇自主避障的任务[2];西安科技大学李雯雯使用了超声波传感器和红外开关对自动导航小车周围的环境进行探测,从而实现了自动导航小车的自主避障[3]。
但是由于避障参数计算不精确、海上风浪干扰、现有技术及设备测量信息不明确等原因,碰撞的事故数量和规模依然令人担忧。
本系统在其研究模式中,结合并借鉴了之前在船舶避障研究领域的经验,现集成计算机技术、通讯技术、激光测距传感器技术等多种先进的现代化技术[4]。
基于Labview的智能小车控制平台

基于Labview的智能小车控制平台摘要:该课程设计是基于Labview的智能汽车控制平台,该平台建立在飞思卡尔单片机及51单片机控制芯片基础上,基于Labview仿真。
采用无线控制小车转向,加速,刹车系统。
该设计是测控专业集单片机控制,电路,软件编程于一体的平台练习,是集测控专业所学的一门综合提高学生素质的课程设计。
关键词:Labview 智能汽车飞思卡尔单片机测控Abstract: the course is designed based on the intelligent vehiclecontrol platform Labview, this platform based on SCM and 51 single-chip microcomputer control freescale Labview, based on the chip. Using radiocontrol car accelerated, braking system, steering. This design is a professional sets single-chip microcomputer control, the control circuit and the software programming in one of the platform, which is a professional knowledge of measurement to improve students' comprehensive quality of the course design.Keywords:intelligent vehicle freescale microcontroller measure-control Labview一、单片机系统的组成1.改装原因:(1):市面上的游戏方向盘都是USB通信协议,用户不了解协议内容,无法用于自己控制要求。
LabVIEW与机器人视觉导航实现机器人路径规划和避障

LabVIEW与机器人视觉导航实现机器人路径规划和避障机器人技术在现代工业、军事和服务领域中扮演着越来越重要的角色。
其中,机器人的自主导航是实现其自主性和应用广泛性的核心技术之一。
而在自主导航中,机器人的路径规划和避障是非常关键的环节。
本文将介绍如何使用LabVIEW与机器人视觉导航来实现机器人的路径规划和避障。
一、LabVIEW在机器人视觉导航中的应用LabVIEW是一种图形化编程环境,能够帮助工程师和科学家快速开发控制、测量和监测系统。
LabVIEW具有强大的数据获取、数据处理和人机交互功能,适用于各种领域的应用。
在机器人视觉导航中,LabVIEW可以与机器人的传感器和执行器进行无缝集成,从而实现机器人的路径规划和避障。
二、机器人路径规划机器人路径规划是指确定机器人从起始位置到目标位置的最佳路径。
在LabVIEW中,可以使用地图信息和传感器数据来进行路径规划。
首先,通过机器人的传感器获取周围环境的信息,包括障碍物位置和地形状况。
然后,使用LabVIEW中的图像处理函数对传感器数据进行处理,提取出有效的地图信息。
接着,可以使用LabVIEW中的路径规划算法,如A*算法或Dijkstra算法,根据地图信息和目标位置,计算出最佳路径。
最后,将计算出的路径信息发送给机器人的执行器,控制机器人按照路径进行移动。
三、机器人避障机器人避障是指在路径规划过程中避开障碍物,确保机器人安全到达目标位置。
在LabVIEW中,可以通过视觉导航的方式实现机器人的避障功能。
首先,使用机器人的摄像头获取实时视频流。
然后,使用LabVIEW中的图像处理和计算机视觉函数对视频流进行处理,检测出障碍物的位置和大小。
接着,可以使用LabVIEW中的路径规划算法,如虚拟力算法或轮廓跟踪算法,根据障碍物的位置和大小,在路径规划过程中添加相应的避障策略。
最后,将修正后的路径信息发送给机器人的执行器,使机器人绕过障碍物,安全到达目标位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( Department of Electronic Information and Electrical EngineeringꎬAnyang Institute of TechnologyꎬAnyang He’nan 455000ꎬChina)
Abstract:By applying sensor and the technology of NI myRIO and LabVIEW integrallyꎬintelligent obstacle avoid ̄ ance vehicle with both smart action and manual control mode based on LabVIEW and NI myRIO were designed and completed. NI myRIO sensor collects parameters of obstacle distanceꎬ car moving speed and the presence of obstacles in front of the car and transmits data to PC via on ̄board WiFi module. Above mentioned parameters were dynamically displayed and stored by the user interface written by LabVIEW. The testing results indicated that the system was of great significance for the development of smart car field with its highly efficientꎬflexibleꎬextensible and compatible feature and user friendly interface. Key words:intelligent vehicleꎻNI myRIOꎻLabVIEWꎻwireless monitoringꎻsensor EEACC:7230ꎻ7230C doi:10.3969 / j.issn.1005-9490.2018.02.051
第 41 卷 第 2 期 2018 年 4 月
电子器件
Chinese Jour No������ 2 Apr. 2018
Design of Intelligent Obstacle Avoidance Vehicle Based on LabVIEW and NI myRIO∗
关键词:智能小车ꎻNI myRIOꎻLabVIEWꎻ无线监控ꎻ传感器 中图分类号:TP242.6 文献标识码:A 文章编号:1005-9490(2018)02-0543-06
当今全世界已进入智能时代的探索和发展ꎬ将生 活中能够与芯片和电脑连接在一起的事物构建一种 控制联系方式ꎬ采用 IOT(Internet of Things)技术来方 便人的生活ꎮ 智能车辆的研究也在如火如荼的进行ꎮ 2011 年国际机器人展上推出的导盲犬机器人ꎬ采用 车载 3D 图像传感器识别位置信息[1-4] ꎻ也有低成本 STC 单片机、红外接近开关和超声波传感器的设计的 小车平台[5-7] ꎻ在避障策略上相应的提出了群集协调 算法ꎬLeader ̄follower 和 Leader ̄Leader 等最优化自动 规划路径算法[8-10] ꎮ 但是单片机、ARM 等低端控制 器ꎬ在功能上局限性较大ꎻ同时避障策略不具有实时 性和自适应性ꎬ并且复杂度高和灵活性差ꎮ
因此设计了基于 NI myRIO 和 LabVIEW 的智能 系统ꎮ 结合了强大的 FPGA 编程能力、良好的兼容 和用户界面ꎬ为低成本、多功能智能车应用发展提供 新的决解方案ꎮ
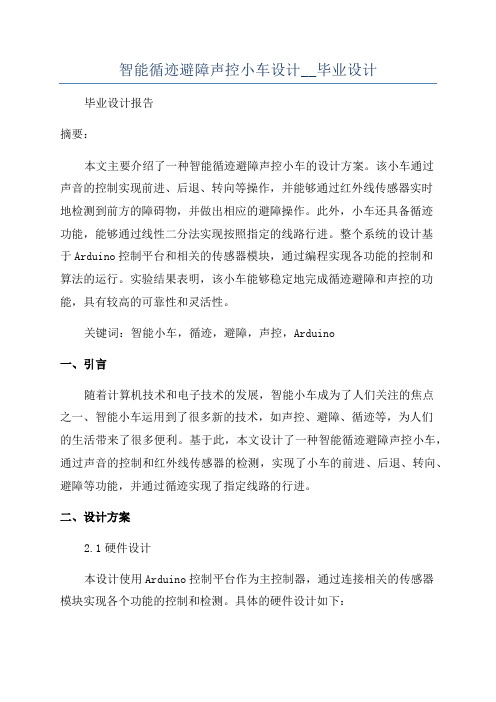
1 控制系统组成
本设计为基于 NI myRIO 的智能避障轮式机器 人ꎬ具有自主避障和手动操作两种运行模式ꎮ 硬件 部分由 NI myRIO 控 制 器 模 块、 避 障 模 块、 循 迹 模 块、摄像机云台模块、 电源模块等功能模块组成ꎮ myRIO 控制器模块主要由板载的 Xilinx Zynq 芯片 和 ARM Cortex-A9 核心组成ꎬ负责处理所有传感器
基于 LabVIEW 和 NI myRIO 的智能避障小车设计∗
李 立∗ꎬ孙龙建
( 安阳工学院电子信息与电气工程学院ꎬ河南 安阳 455000)
摘 要:综合运用传感器监测、NI myRIO 和 LabVIEW 技术ꎬ设计完成了基于 LabVIEW 和 NI myRIO 的具有智能和人工操控
两种控制模式的智能避障小车ꎮ 利用 NI myRIO 处理传感器采集障碍物的距离、小车移动的速度和小车前方是否存在障碍物 等参数ꎬ通过板载的 WiFi 模块将数据传输给 PC 机ꎬ并由 LabVIEW 编写的用户界面实时动态显示和存储上述参数ꎮ 测试结果 表明ꎬ该系统高效灵活ꎬ具有较好的扩展性和兼容性ꎬ同时提供良好的用户操作界面ꎬ对智能车领域的发展具有重大意义ꎮ
数据、协调控制各模块的数据通信和功能控制ꎻ避障 模块主要由超声波测距模块组成ꎬ采用超声波来检 测前方是否存在障碍物及距离障碍物的距离ꎬ并将 数据传递给控制器及上位机ꎻ循迹模块主要由光电 开关组成ꎬ用于检测地面的轨迹ꎻ摄像机云台模块主 要由高 清 数 字 摄 像 头 和 两 个 可 进 行 姿 态 调 整 的 SG-90 舵机组成ꎻ电源模块主要是由一块 12 V 的电 池组成ꎬ负责向各个模块供电ꎮ 软件采用 LabVIEW 进行程序框架的架构ꎬ通过 NI myRIO 对数据进行 处理再发送给上位机ꎬ并在 LabVIEW 的前面板上实 时显示ꎬ在非智能的情况下会等待操作者进行下一 步的操作ꎻ若是在智能条件下ꎬ则会自行处理数据ꎬ 并根据避障程序自动躲避前方的障碍物ꎮ 其控制系 统原理如图 1 所示ꎮ
项目来源:国家自然科学基金河南省人才培养联合基金项目( U1204613) ꎻ河南省科技厅科技攻关项目( 172102310671) ꎻ国家 级大学生创新创业训练计划项目( 201611330001)
收稿日期:2017-01-25 修改日期:2017-03-19
544
电 子 器 件
第 41 卷