基于磁耦合谐振的自主无线充电机器人系统设计_宋凯
基于磁耦合谐振的自主无线充电机器人系统设计

2、实现谐振频率和能量转换:要实现谐振频率的一致性,发射端和接收端的 谐振器需采用相同的频率。同时,需要通过控制算法来实现能量的高效转换。
系统设计
基于磁耦合谐振技术的自主无线充电机器人系统主要包括充电模块、传输模块 和控制模块三部分。
1、充电模块:该模块主要由发射端和接收端组成,包括电源管理、功率控制、 磁场调制等功能。发射端负责将电能转化为磁场能量并通过空气传输给接收端, 接收端负责将磁场能量转化为电能储存于电池中。
近年来,磁耦合谐振技术作为一种新型的无线充电技术,具有高效、节能、安 全等优点,为自主无线充电机器人的研究提供了新的解决方案。本次演示旨在 探讨基于磁耦合谐振技术的自主无线充电机器人系统的设计。
相关技术综述
传统的机器人充电方式主要依赖于有线充电,但这种方式限制了机器人的移动 性和灵活性。近年来,无线充电技术得到了迅速发展,其主要分为磁感应式和 磁共振式两种。磁感应式充电是通过磁场的变化实现能量的传递,但其传输距 离较短,充电效率较低。而磁共振式充电是通过谐振来实现能量的传递,具有 传输距离远、充电效率高等优点,因此更适合于自主无线充电机器人的应用。
谢谢观看
为验证基于磁耦合谐振技术的自主无线充电机器人系统的可行性和有效性,我 们进行了以下实验:
1、实验设计:采用10cm×10cm的方形线圈作为发射端,接收端为5cm×5cm的 方形线圈,距离发射端10cm。分别测试不同距离、不同角度下的充电效率。
2、数据分析:实验结果表明,在不同距离和角度下,基于磁耦合谐振技术的 自主无线充电机器人系统的充电效率均高于传统磁感应式充电。在10cm距离、 0度角度下,充电效率达到最高值,为87.5%。随着距离和角度的增加,充电 效率逐渐降低,但仍高于传统磁感应式充电。
基于磁耦合谐振方式的扫地机器人无线充电系统设计
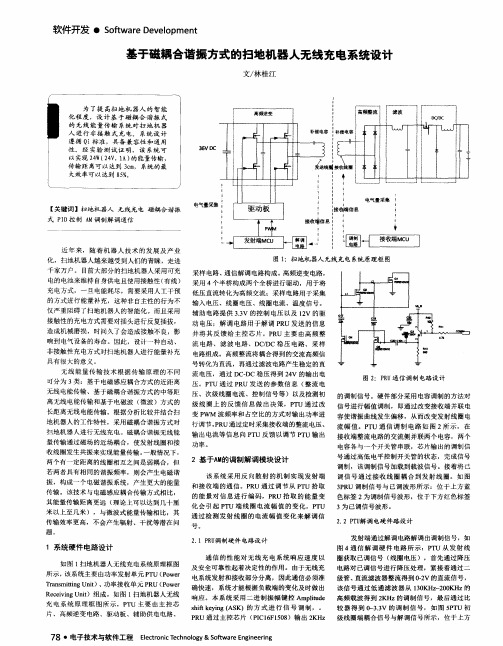
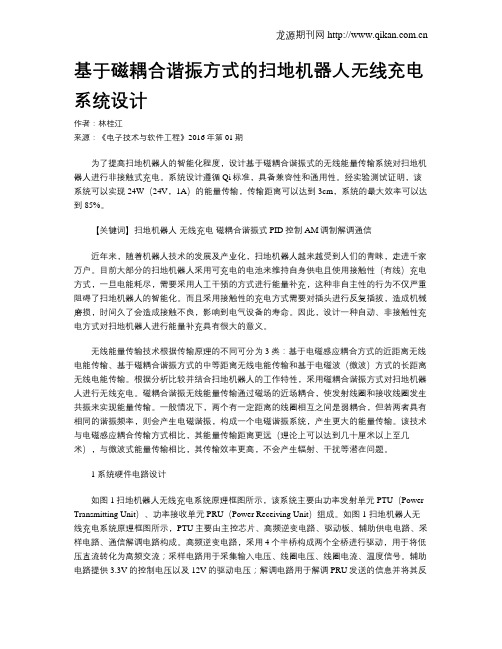
图 2: PRU通 信调 制 电路 设 计
的调制信 号。硬件 部分采用电容调制的方法对 信 号进 行幅值 调制,即通过改变接收端并联 电 容使谐振 曲线 发生偏 移,从而改变发射线圈 电 流 幅值 。PTU通信 调 制 电路 如 图 2所 示 ,在 接 收端整 流电路的交流侧并联两个 电容,两个 电容各 与一个 开关管串联,芯片输 出的调制信 号通 过 高低 电平 控 制 开 关 管 的 状 态 , 完 成 信 号 调制 ,该调制信 号加载 到载波 信号。接着将 己 调 信 号通过 接 收线 圈耦合 到发 射线 圈。如 图 3PRU 调 制 信 号 与 已调 波 形 所 示 : 位 于 上 方 蓝 色标签 2为调制信号波形 ,位 于下方红色标签 3为 己调信号波形 。
无 线能 量传输 技术 根据 传输 原理 的不 同 可 分 为 3类 :基 于 电磁 感 应 耦 合 方 式 的近 距 离 无 线 电能 传 输 、基 于 磁 耦 合 谐 振 方 式 的 中等 距 离无线 电能传输和基于 电磁波 (微波 )方式 的 长距离无线 电能传输 。根据分析 比较并结合扫 地机器人的工作特性 ,采用磁耦合谐振方式对 扫 地 机 器 人 进 行 无 线 充 电 。磁 耦 合 谐 振 无 线 能 量 传 输 通 过 磁 场 的近 场 耦 合 ,使 发 射 线 圈 和 接 收线圈发生共振来实现能量传输 。一般情况下 , 两 个 有 一 定 距 离 的 线 圈 相 互 之 间 是 弱 耦 合 , 但 若两者具有相同的谐振频率 ,则会产生 电磁谐 振 ,构成一个 电磁谐振系统,产生更大的能量 传 输。该技术与 电磁感应耦合传输方式相 比, 其能量传输 距离 更远 (理论上可以达 到几十厘 米 以上至 几米 ),与微 波式能量传输相比,其 传输效率更 高,不会产 生辐射 、干扰等潜在 问 题 。
基于“磁耦合共振”的无线供电系统

基于“磁耦合共振”的无线供电系统队长:史俊波队员:倪杰朱爽李蔚电气与电子工程学院摘要:在电子科技技术高速发展的今天,全球范围内的手机用户数量已经达到了33 亿,再加上MP3、MP4等其他周边电子产品,平均不到2人就拥有一个需要充电的便携式电子产品。
目前便携式电子设备进行充电主要采用的是一端连接交流电源,另一端连接便携式电子设备充电电池的传统充电方式。
这种充电方式数据线接口用久了通常会有接触不良等现象,而且单个充电器适应面不广,因不同的类型电子产品需要使用不同的充电器,充电时还要寻找合适的插口和接线,费时费力,各种便携式电子产品的充电是一件令人头痛的麻烦事。
为了改良上面的现象,研发智能无线充电器是很有必要的。
非接触式感应充电器在上个世纪末期诞生.凭借其携带方便、成本低、无需布线等优势迅速受到各界关注。
本文是介绍基于STC89C52为核心控制器的无线充电系统。
整个系统可以分为七个部分:电源,主控芯片,红外,正弦振荡电路,驱动放大电路,发射线圈,接收线圈。
本设计是一种简单实用的基于磁耦合无线充电器,通过线圈将电能以无线方式传输给电池。
只需把电池和接收设备放在充电平台上即可对其进行充电。
实验证明.虽然该系统还不能充电于无形之中.但已能做到将多个电器放置于同一充电平台上同时充电,免去接线的烦恼。
关键词:电子产品,磁耦合,无线充电Abstract: In the electronic science and technology rapid development today, the whole ball within the scope of the mobile phone users number has reached 3.3 billion, plus MP3, MP4 and other neighboring electric product of the latter, the average less than two people will have a need to recharge portable electronic products. At present portable electronics to charge the main use is end connect ac power, the other end connection portable electronic equipment rechargeable batteries and the traditional charging ways. This kind of charging mode data cable joint mouth with long will usually have bad contact wait for a phenomenon, and a single charger to adapt to the surface not wide, because of different type electric son products need to use a different charger, charge also want to find the right jack and rationalize connection, true it may be said fee when effort; All kinds of portable electronic products charge is a A headache problem. In order to improve the above we like, research and development of intelligent wireless charger is very necessary. Non-contact induction charger in the last century was born. With its easy to carry, low cost, no wiring etc advantages quickly by the attention from all walks of life. Hence, to realize wireless charging, the energy transmission efficiency is high, easy to carry become one of research directions in charging system.This paper is based on STC89C52 as the core controller wireless charging system. The whole system can be divided into seven parts: power supply, master control chip, infrared, sinusoidal oscillation circuit, drive amplifying circuit, emission coil, receive coil. This design is a kind of simple and practical based on magnetic coupling wireless transfer can charger, through the coil will power to wireless transmission to the battery. Just put battery and receiving equipment on the charging platform can carry on the charge. Experiments prove. Although this system also can't charging in aeriform in, but already can do more than will be placed in the same electrical charging platform at the same time, the charging, avoid the trouble of connection.Keywords: electronic products, magnetic coupling, wireless charging1硬件系统设计1.1器件选择本无线充电系统的设计是用线圈耦合方式传递能量,使接收单元接收到足够的电能,以保证后续电路能量的供给。
基于磁耦合谐振方式的扫地机器人无线充电系统设计
基于磁耦合谐振方式的扫地机器人无线充电系统设计作者:林桂江来源:《电子技术与软件工程》2016年第01期为了提高扫地机器人的智能化程度,设计基于磁耦合谐振式的无线能量传输系统对扫地机器人进行非接触式充电。
系统设计遵循Qi标准,具备兼容性和通用性。
经实验测试证明,该系统可以实现24W(24V,1A)的能量传输,传输距离可以达到3cm,系统的最大效率可以达到85%。
【关键词】扫地机器人无线充电磁耦合谐振式 PID控制 AM调制解调通信近年来,随着机器人技术的发展及产业化,扫地机器人越来越受到人们的青睐,走进千家万户。
目前大部分的扫地机器人采用可充电的电池来维持自身供电且使用接触性(有线)充电方式,一旦电能耗尽,需要采用人工干预的方式进行能量补充,这种非自主性的行为不仅严重阻碍了扫地机器人的智能化。
而且采用接触性的充电方式需要对插头进行反复插拔,造成机械磨损,时间久了会造成接触不良,影响到电气设备的寿命。
因此,设计一种自动、非接触性充电方式对扫地机器人进行能量补充具有很大的意义。
无线能量传输技术根据传输原理的不同可分为3类:基于电磁感应耦合方式的近距离无线电能传输、基于磁耦合谐振方式的中等距离无线电能传输和基于电磁波(微波)方式的长距离无线电能传输。
根据分析比较并结合扫地机器人的工作特性,采用磁耦合谐振方式对扫地机器人进行无线充电。
磁耦合谐振无线能量传输通过磁场的近场耦合,使发射线圈和接收线圈发生共振来实现能量传输。
一般情况下,两个有一定距离的线圈相互之间是弱耦合,但若两者具有相同的谐振频率,则会产生电磁谐振,构成一个电磁谐振系统,产生更大的能量传输。
该技术与电磁感应耦合传输方式相比,其能量传输距离更远(理论上可以达到几十厘米以上至几米),与微波式能量传输相比,其传输效率更高,不会产生辐射、干扰等潜在问题。
1 系统硬件电路设计如图1扫地机器人无线充电系统原理框图所示,该系统主要由功率发射单元PTU(Power Transmitting Unit)、功率接收单元PRU(Power Receiving Unit)组成。
基于磁耦合谐振的无线充电系统设计

3 0一
合系数 L 3 4 J . 根据 基 尔霍 夫 电压定 律,可 以列 出两 个 回路
电压
实际 的触 发波 形和 输 出方波 波形 如下 图 4所 示
[ R I + j ( o ) L l 一 c 1 ) ] , 1 + j o  ̄ Ml 2=V 1
( 1 )
电容和 电感 ,R 2 ,C 1 ,V1 接 受回路 的等 效 电阻 ,
电感和 电容 ,R为等 效的负载 电阻 . M 是等效的耦
收稿 日期 :2 0 1 6 — 0 9 — 2 3 作者简介 :王宇松 ( 1 9 8 1 一 ),男 ,江苏盐城人 ,龙岩学 院讲师 ,研究方 向:现代检测技术及嵌人式 开发 基金项 目:龙岩学院校立服务海西 ( 教育厅 B ) 项 目资助 ( J B 1 2 2 1 6 )
通 过对无线 供 电的电磁 耦合 回路 的原理分 析,
1 系统 电路模 型
磁 耦 合无 线充 电系 统利 用磁 耦合 谐振 技术 , 交变 磁场 在接 受和 发射线 圈 中能量 耦合 ,系 统包
输入 输 出 回路 可 以简化 成如 图 2所示 的 电路模 型 简 图,其 中 R1 ,C1 ,V1 为 发射 回路的等 效 电阻、
^
基于磁耦合谐振的无线充电系统设计
王 宇松 , 卢彬锋 , 赖义汉 , 郑诗 涵
( 1 . 龙岩学院 ;2 . 龙岩 易为 电子技 术有限公 司 , 福建 龙岩 3 6 4 0 0 0 )
摘 要 :当前 无线供 电技 术成为研 究热点 ,可以解决有线供 电 紊统 束缚 ,利用磁耦合 谐振原理 设计无 线充 电 系统 ,系统分 为 能量发 送和 接 受 两个部 分 ,发 送部 分 由直流 1 2 V 电源供 电 ,经 NE 5 5 5电路 产 生 6 2 . 6 K Hz的高频信 号 ,激励 I R 2 1 0 4驱 动逆 变半桥 ,产 生 高频 交 变电流 ,通过发 送 线 圈产 生磁 场 ,在 空 间 能量耦合 到接 受端 ,经整 流 、滤 波后 ,用 T L 4 9 4实现 电流控制 和 电压控 制 功能 ,充 电 电压 和充 电电流在
基于磁耦合谐振技术的无线充电系统

( 1 . 兰州理 工大 学 电气 工程 与信 息工程 学 院 , 甘肃 兰州 7 3 0 0 5 0 ; 2 . 国 网甘 肃省 电 力公 司电力科 学研 究院
甘肃 兰州 7 3 0 0 5 0 )
摘 要 :本 文介 绍 了磁 耦 合谐 振 式无 线 电能 传输 技 术 的工 作原 理 、 基 本 结构 , 并 且提 出 了几 种提 高效 率的 方法 设 计 了一种 基 于磁 耦 合谐振 的无 线充 电 实验 装 置 , 并试 图在 各模 块优化 的 情况 下 , 统筹 各
中图分 类 号 : T N 9 9
文 献标 识码 : A
文章 编号 :1 6 7 4 — 6 2 3 6 ( 2 0 1 7 ) 0 2 - 0 0 9 3 - 0 4
Wi r e l e s s c ha r g i n g s y s t e m ba s e d o n ma g n e t i c c o upl i ng r e s o na n c e t e c hn o l o g y
无线 充 电 。 作 为 一种新 型 的 电能传 输 方式 , 简 便
7 3 0 0 5 0 . C h i n a : 2 . G a n s u 、 E l e c t r i c P o w e r Re s e a r c h I n s t i t u t e , S C C C, G o J t s u L a n z h o u 7 3 0 0 5 0 , C h , )
Ab s t r a c t :T h i s p a p e r i n t r o d u c e s t h e wo r k i n g p i r n c i p l e a n d t h e b a s i c s t r u c t u r e o f ma g n e t i c c o u p l e d r e s o n a n t wi r e l e s s p o we r t r a n s mi s s i o n t e c h n o l o g y ,a n d p u t s f o r w a r d s e v e r a l me t h o d s t o i mp r o v e t h e e ic f i e n c y .De s i g n e d a wi r e l e s s c h a r g i n g b a s e d o n ma g n e t i c c o u p l i n g r e s o n a n c e e x p e r i me n t d e v i c e ,a n d t fe d t o i n t h e o p t i mi z a t i o n o f e a c h mo d u l e,a s a w h o l e t h e r e l a t i o n s h i p b e t we e n t h e p a r t s a n d ma k e t h e s y s t e m wo r k i n t h e b e s t s t a t e . T h e ma i n c i r c u i t a d o p t s f u l l b i r d g e i n v e r t e r c i r c u i t ,t h e c o n t r o l c i r c u i t a d o p t s P W M+ P L L, t h e r e s o n a n t  ̄ e q u e n c y i s 7 6 k Hz ,t h e e ic f i e n c y i s mo r e t h a n 9 0 %. Ke y wo r d s :ma g n e t i c c o u p l i n g;r e s o n a n c e ;wi r e l e s s c h a r g i n g ;i n v e r t e r c i r c u i t
基于磁耦合谐振式无线电能传输技术的分析与设计
四、设计方案
四、设计方案
为了克服上述挑战,本次演示提出一种基于磁耦合谐振式无线电能传输技术 的创新设计方案。具体实现方案如下:
四、设计方案
1、选用高性能磁性材料和低损耗线圈,以提高传输效率和减小损耗。 2、通过调节发射和接收线圈的参数,实现最佳的磁场耦合和共振效果。
3、加入电磁屏蔽层,以减小对 周围电子设备的干扰。
五、总结与展望
1、提高传输效率和传输距离:通过优化线圈设计和材料选择等手段,提高磁 耦合谐振式无线电能传输技术的传输效率和传输距离。
五、总结与展望
2、降低成本:探索低成本的材料和制造工艺,以降低磁耦合谐振式无线电能 传输技术的成本,使其更具市场竞争力。
五、总结与展望
3、拓展应用领域:将磁耦合谐振式无线电能传输技术应用于更多领域,如医 疗器械、智能交通工具等。
验证实验
验证实验
为验证磁耦合谐振式无线电能传输的方向性,我们设计了一个实验系统,包 括发射和接收线圈、功率源、测量仪器等。实验过程中,我们将发射线圈和接收 线圈分别置于不同角度和距离的位置,测量其传输效率。具体实验步骤如下:
验证实验
1、搭建实验系统,包括发射和接收线圈、功率源、测量仪器等。 2、将发射线圈和接收线圈置于同一水平面上,保持两者中心线重合,测量传 输效率。
基于磁耦合谐振式无线电能传 输技术的分析与设计
01 一、导言
目录
02 二、技术原理
03 三、应用分析
04 四、设计方案
05 五、总结与展望
06 参考内容
内容摘要
无线电能传输技术近年来得到了广泛的和研究,其中磁耦合谐振式无线电能 传输技术具有传输效率高、传输距离远等优点,因此在许多领域具有广阔的应用 前景。本次演示将对磁耦合谐振式无线电能传输技术的原理、应用和设计进行分 析和探讨。
室内移动机器人非接触自主无线充电装置及方法[发明专利]
![室内移动机器人非接触自主无线充电装置及方法[发明专利]](https://img.taocdn.com/s3/m/e4edc50c19e8b8f67d1cb956.png)
专利名称:室内移动机器人非接触自主无线充电装置及方法专利类型:发明专利
发明人:宋凯,朱春波,李阳,李晓宇,赵鑫
申请号:CN201310121146.7
申请日:20130409
公开号:CN103151825A
公开日:
20130612
专利内容由知识产权出版社提供
摘要:室内移动机器人非接触自主无线充电装置及方法,涉及无线电能传输、移动机器人技术领域,具体涉及一种室内移动机器人非接触自主无线充电装置及方法;目的是为了解决现有机器人无法进行智能无线充电的问题,采用基于磁耦合谐振原理的无线电能传输技术对机器人进行非接触无线充电,无线射频收发器收到DSP主控单元发出的充电指令后,将充电指令发送给控制器,控制器根据充电指令控制语音播放单元播放事先录制好的语音指令呼叫机器人充电,固定在待充电的室内移动机器人上的DSP主控单元根据该语音指令进行自主寻源并实现充电;本发明适用于各种家庭服务机器人及医疗陪护机器人。
申请人:哈尔滨工业大学
地址:150001 黑龙江省哈尔滨市南岗区西大直街92号
国籍:CN
代理机构:哈尔滨市松花江专利商标事务所
代理人:胡树发
更多信息请下载全文后查看。
基于磁耦合谐振的自适应高效无线充电系统及其实现方法[发明专利]
![基于磁耦合谐振的自适应高效无线充电系统及其实现方法[发明专利]](https://img.taocdn.com/s3/m/75aadaedbb68a98270fefa3b.png)
专利名称:基于磁耦合谐振的自适应高效无线充电系统及其实现方法
专利类型:发明专利
发明人:张在琛,武越,包晨阳,熊柏苹,刘佳琦
申请号:CN201810384615.7
申请日:20180426
公开号:CN108565983A
公开日:
20180921
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于磁耦合谐振的自适应高效无线充电系统,根据磁耦合无线电能传输方式,将发射端放置于圆形转台外适宜距离的某处,将接收端放置于转台中心。
使转台工作,接收端将与转台一起进行360旋转。
与此同时,利用磁耦合谐振无线充电技术从发射端向接收端进行电能传输。
系统会自动记录不同转动位置角度下对应的充电传输效率,并在转动一周后得出系统传输效率最大的角度位置,随后控制转台旋转至该位置,接收端负载将持续接收最大的能量供给。
接收端线圈保持该角度位置工作一段时间后,重新进行最佳传输效率位置的寻找与调整,从而实现自适应高效无线充电系统。
申请人:东南大学
地址:210096 江苏省南京市玄武区四牌楼2号
国籍:CN
代理机构:南京众联专利代理有限公司
代理人:杜静静
更多信息请下载全文后查看。
基于磁耦合谐振的机器人无线充电装置
基于磁耦合谐振的机器人无线充电装置摘要: 目前市场上电子设备的充电方式的趋势为无线充电。
智能机器人的发展也受限于能源的携带问题,因为没有高能量密度的电池,所以充电十分频繁。
目前的机器人充电大多为使用电缆进行有线充电,长期的插拔造成的机械磨损不仅损坏接口,降低充电效率,更有可能带来断路、短路等危险情况。
而无线充电恰好能解决这个问题。
磁耦合谐振式能量传输相比于电磁感应式能量传输距离更远,能够达到几十厘米以至于几米的传输距离,相比于微波式无线充电能量传输效率较高,对生物的危害低,而且不受中间障碍物的影响。
本文通过对“磁耦合谐振”式能量传输的分析,为机器人设计一种无线充电装置。
利用Multisim10仿真软件进行电路仿真模拟,得出该设备的工作效率。
该装置能够让机器人高效、安全的进行无线充电,让充电摆脱电源线,使用的方式更加简单,优化了用户体验。
关键词:无线充电; 磁耦合谐振; 机器人; Multisim10引言无线充电技术的原理研究可以追溯到19世纪30年代,科学家迈克尔?法拉第首先发现了电磁感应原理,即周围磁场的变化将使电线中产生电流。
到了 19世纪 90年代,爱迪生光谱辐射能研究项目的一名助手,也是后来的科学家尼古拉?特斯拉(Nikola Tesla) 证实了无线传输电波的可能性,并申请了首个专利。
在1900年,特斯拉取得经费,开始修建华登克里夫塔(Wardenclyffe Tower)。
特斯拉希望用这个电磁塔进行跨越大洋的无线电能传输。
虽然特斯拉的实验并没有取得成功,但是他所构想的向全球进行无线超远距离输电的蓝图却着实令人震惊。
他把海拔六十千米左右的电离层看作外导体,把地球看作内导体,在两者之间建立8Hz的低频共振,利用环绕地球表面的电磁波进行无线传输。
目前市场上无线充电设备层出不穷,设计原理也不尽相同,大致上原理有三种:电磁感应、磁耦合共振和微波。
三种原理各有千秋,电磁感应式能量传输距离短,只有几十毫米,且线圈必须精准对,正否则效率极低。
基于磁耦合谐振的自主无线充电机器人系统设计_宋凯
In this paper, an indoor mobile robot system with autonomous wireless charging
function is developed and magnetically coupled resonance technology is used to perform non-contact wireless charging for the robot. The transmitting coil is fixed somewhere in the floor and a speaker is placed in the same area, while the receiving coil is placed in the robot bottom. The charging steps are as follows: Firstly, robot will carry out the charging procedure if the monitored battery voltage is lower than the threshold value or user sends a mobile phone short message to the robot. Simultaneously, voice playback unit of the power emission source is triggered so that it will broadcast voice instruction and call robot charging. Secondly, robot processes the sampled voice signals and determines the source direction using the sound localization algorithm on DSP. What’s more, the robot is driven and controlled by DSP which guide its search for the power emission source. Finally, wireless charging can be achieved when robot enters within the designated area of the emission source. Since the system has the characteristics of autonomous mobile tracing and non-contact wireless charging, the robot can quickly find the power supply in tens of seconds as well as intelligently realize the wireless charging without human intervention. Keywords: Wireless power transfer, mobile robot, autonomously contactless charging, magnetically coupled resonance, DSP
基于可穿戴设备的微型磁耦合谐振无线充电系统的分析
基于可穿戴设备的微型磁耦合谐振无线充电系统的分析赵军;李靖;李乃良;张遥【期刊名称】《电气工程》【年(卷),期】2017(005)002【摘要】近几年,越来越多的可穿戴设备走进人们的生活。
但对大多数可穿戴设备而言,电池续航时间短,充电困难已经成为用户普遍反映的问题,磁耦合谐振无线能量传输技术能够为可穿戴设备提供方便,安全的能量供应。
由于可穿戴设备体积小,因此设计一种小尺寸的无线充电系统十分必要。
本文通过对谐振线圈进行仿真分析,得到了影响线圈谐振频率的关键设计参数。
在此基础上设计出了小小匹配的谐振系统和新型的大小匹配的谐振系统,并且系统中小谐振线圈的体积仅为0.675cm3,能够满足可穿戴设备的体积需求。
对两谐振系统的传输效率进行实验分析,结果表明大小匹配的谐振系统具有更好的能量传输性能,在可穿戴设备领域具有良好的应用前景。
【总页数】12页(P115-125)【作者】赵军;李靖;李乃良;张遥【作者单位】[1]河北工业大学电磁场与电器可靠性省部共建重点实验室,天津;;[1]河北工业大学电磁场与电器可靠性省部共建重点实验室,天津;;[1]河北工业大学电磁场与电器可靠性省部共建重点实验室,天津;;[1]河北工业大学电磁场与电器可靠性省部共建重点实验室,天津【正文语种】中文【中图分类】F2【相关文献】1.基于磁耦合谐振的自主无线充电机器人系统设计 [J], 宋凯;朱春波;李阳;李晓宇;赵鑫2.基于磁耦合谐振技术的无线充电系统 [J], 王惠中;王文涛;刘联涛;朱宏毅3.基于磁耦合谐振的无线充电系统设计 [J], 王宇松;卢彬锋;赖义汉;郑诗涵4.基于磁耦合谐振方式的扫地机器人无线充电系统设计 [J], 林桂江;5.基于双LCL变补偿参数的磁耦合谐振式无线充电系统研究 [J], 刘帼巾;白佳航;崔玉龙;李志刚;岳承浩因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
j M 12 Z2 j M 23
U I 1 S j M 23 I 2 0 0 Z3 I 3 0
=
( 1)
2 2 2 k12 k23Q1Q2 Q3 RL 2 2 ( RL +R3 ) 1 k12Q1Q2 k23Q2Q3
Q2 =
L3 L2 , Q3 = ,代入式( 4) 、式( 5)得 RL +R3 RR +R2
2 2 2 2 US k12 k23Q1Q2 Q3 RL ( 6) 2 2 ( RS +R1 ) ( RL +R3 ) (1 k12 Q1Q2 k23Q2 Q3 ) 2
PL =
根据等效电路可以列写回路的 KVL 方程为
Design and Implementation of an Autonomous Wireless Charging Robot System Using Magnetically Coupled Resonance
Song Kai Zhu Chunbo Li Yang Li Xiaoyu Zhao Xin China) ( Harbin Institute of Technology Abstract Harbin 150001
国家自然科学基金( 61201306 )和中央高校基本科研业务费专项基金( HIT.NSRIF.2014018 )资助项目。 收稿日期 2013-09-04
第 29 卷第 9 期
宋
凯等
基于磁耦合谐振的自主无线充电机器人系统设计
39
1
引言
随着传感器、智能控制以及能源等方面技术日
在相距一定的距离时,由于磁场耦合产生谐振,从 而进行能量传递。一般来说,两个有一定距离的线 圈相互之间是弱耦合,但若两者具有相同的谐振频 率,则会产生电磁谐振,构成一个电磁谐振系统, 如果某一端连接电源不断为该谐振系统提供能量, 而另一方消耗能量,则实现了电能的传输,其传输 功率可达到几百瓦以上至几千瓦。之所以称其为 “磁耦合谐振”,是因为空间进行能量传递的媒介 是交变磁场。该技术与感应耦合传输方式相比,其 能量传输距离更远(理论上可以达到几十厘米以上 至几米) , 与微波式能量传输相比, 其传输效率更高, 对生物的影响更小,而且不受环境中一般障碍物的 影响。因此,如果要实现对移动机器人真正意义上 的非接触无线充电,需要采用磁耦合谐振的能量传 输方式,要实现自主性,机器人必须能在所处的环 境中实现自主寻源、自动充电,才能执行连续任务 实现真正的智能化。
新月异的发展,越来越多的服务机器人走向千家万 户。同时,人们希望服务机器人能延长现场作业时 间,实现长期自主工作,故补充机器人动力能源成 为一个亟待解决的问题。目前室内移动机器人都是 使用可充电电池来给自身供电,但是一般只能维持 几个小时,一旦电量耗尽,必须采用人工干预的方 式来给机器人充电。如果采用人工充电,那么机器 人就处于一种非自主的状态,这阻碍了机器人的智 能化。如何让机器人在无人工干预环境下安全、可 靠、快速、高效地实现自动充电是实现机器人智能 化的一项关键技术。 现有的移动机器人自动充电技术大多是采用接 触式充电方式 [1,2],通常借助激光测距仪、视觉传感 器或红外探测器与充电设备进行对接,但存在以下 问题:首先,机器人从当前位置移动到充电座需要 导航行为,受到定位误差的限制,导航精度较低。 其次,机器人与充电座触点的对接需要较高的精确 性,这增加了设计的复杂性和控制的难度,同时对 接操作过程非常复杂,消耗时间较长。最后,由于 结构设计等方面原因,机器人和充电座触点之间一 旦连接便无法自动脱离,频繁对接也容易对系统的 可靠性带来影响,比如多次插拔对接操作会引起机 械磨损,导致接触松动,不能有效传输电能;如果 连接部件出现污物,将会导致接触不良或者电连接 失败;若在潮湿或存在导电介质的环境中,也极容 易引起电路短路。可见,要使机器人同时满足高导 航精度、高速定位、高可靠性对接的充电要求是十 分困难的。因此,急需提出一种通过非接触方式就 能够对移动机器人进行无线充电的方法。 根据能量传输原理,目前在国内外研究的非接 触无线电能传输技术主要分为三类
150001)
设计了具有非接触自主无线充电功能的室内移动机器人系统,采用基于磁耦合谐振原
理的无线电能传输技术对机器人进行非接触无线充电。发射线圈埋于室内固定某处,其上方放置 扬声器,接收线圈安放在机器人底部。充电步骤为:机器人通过监测电池电压或用户发送手机短 信的方式开启充电程序,同时触发能量发射系统语音播放单元,使其播放语音指令呼叫机器人充 电;机器人利用 DSP 实时采集语音信号,并通过声源定位算法判断发射系统方向,利用 DSP 进 行驱动控制,指导其寻找发射源;当机器人进入发射源指定区域范围内,便可实现无线充电。该 系统具有自主移动寻源和非接触无线充电的特点,无需人为干预,机器人可在几十秒内快速找到 发射源并实现自主无线充电。 关键词: 无线电能传输 中图分类号: TM724 移动机器人 非接触自主充电 磁耦合谐振 DSPr mobile robot system with autonomous wireless charging
function is developed and magnetically coupled resonance technology is used to perform non-contact wireless charging for the robot. The transmitting coil is fixed somewhere in the floor and a speaker is placed in the same area, while the receiving coil is placed in the robot bottom. The charging steps are as follows: Firstly, robot will carry out the charging procedure if the monitored battery voltage is lower than the threshold value or user sends a mobile phone short message to the robot. Simultaneously, voice playback unit of the power emission source is triggered so that it will broadcast voice instruction and call robot charging. Secondly, robot processes the sampled voice signals and determines the source direction using the sound localization algorithm on DSP. What’s more, the robot is driven and controlled by DSP which guide its search for the power emission source. Finally, wireless charging can be achieved when robot enters within the designated area of the emission source. Since the system has the characteristics of autonomous mobile tracing and non-contact wireless charging, the robot can quickly find the power supply in tens of seconds as well as intelligently realize the wireless charging without human intervention. Keywords: Wireless power transfer, mobile robot, autonomously contactless charging, magnetically coupled resonance, DSP
[3,4]
2
磁耦合谐振无线电能传输系统建模
所谓磁耦合谐振式无线能量传输技术 [5-8] , 就是
利用两个具有相同谐振频率的线圈,在相距一定的 距离时,线圈谐振、磁场强耦合,进行能量传递, 传递能量的载体是中高频磁场。若存在多个相同谐 振频率的线圈,在强耦合作用下空间磁场分布将 被改变,能量根据耦合程度重新分配。每个线圈 的电磁谐振是由线圈中的磁场与分布电容的电场实 现的。 由于移动机器人定位寻源存在一定偏差,所以 放置在地面的发射线圈尺寸要尽可能大,而机器人 自身底盘直径较小,造成发射线圈、接收线圈比例 失调,因此传输的效率和功率较低。为了降低比例 失调和线圈偏移对无线充电性能的影响,本系统在 发射线圈的平面内加入了一个中继线圈,其轴线与 发射线圈重合,一起埋于室内固定某处。接收线圈 安放在机器人底盘,直接连接负载。由于引入了中 继线圈,其谐振频率与发射线圈的频率相同产生谐 振,继而增强了磁场强度,扩大了磁场作用范围, 从而使能量传输得到显著提升。系统等效电路模型 为中高频逆变源,RS 为电源内 如图 1 所示,其中 U
的等效电感,R3 为接收线圈的等效电阻,C3 为外接 谐振电容; RL 为负载阻抗, M23 为中继线圈与接收 线圈之间的互感。
电能传输效率为
=
2 R I PL RL 3 L 2 I PS U ( RR +R2 )( RL +R3 ) 2 M 23 S 1
2 2 4 M12 M 23 2 ( RS +R1 )( RR +R2 )( RL +R3 ) ( RS +R1 ) 2 M 232 ( RL +R3 ) 2 M12