第九章 状态空间分析法
现代控制理论 第九章 现代控制理论-控制系统的数学模型

1 C
∫ i (t )dt
= u c (t )
i (t ) | t = t 0 = i (t 0 )
u c (t ) | t = t 0 = u c (t 0 )
若将 i (t ) 和 u c (t ) 视为一组信息量,则这样一 组信息量就称为状态。这组信息量中的每个变 量均是该电路的状态变量。 状态:表征系统运动的信息和行为 状态 表征系统运动的信息和行为。 表征系统运动的信息和行为 状态变量:系统的状态变量就是确定系 统状态的最小一组变量。(或完全表征 系统运动状态的最小一 组变量。)
di dt
=
R x1 L
1 L
x2+ 1 u( t )
L
x
2
1 x c 1
y = x2 = u c (t )
写成矩阵— 写成矩阵—向量的形式为:
x
1
=
R L
1 L
x1
x
2
1 c
0
x2
+
1 L u( t )
0
y=
x1
0 1
x2
为状态向量
x 1 x2 T 令x =
则:
x=
R L
1 L
1 c
1 x+ L
状态方程 输出方程
一 、状态、状态变量和状态空间
R + u(t)
输入
L
+ + y C uc(t) _ 输出 _
i(t)
_
解:以 i(t) 作为中间变量,列写该回路的微分方程
di (t ) L + Ri (t ) + u c (t ) = u (t ) dt
求解这个微分方程组, 出现两个积分常数。 它们由初始条件
第9章 状态空间分析法

根据A和b的上述特征,一般只要对微分方程式或传递
函数的观察,就能直接写出矩阵A和b及对应的动态方程。
第二节 传递函数与动态方程的关系
能控标准形状态图
第二节 传递函数与动态方程的关系
例9-3 已知一系统的传递函数为
试写出能控标准形的状态空间表达式。 解:根据矩阵A和b的特征,直接写出系统能控标准形的 状态空间表达式为:
第二节 传递函数与动态方程的关系
3、对角标准型实现
当系统的传递函数只含有相异的实极点时,还可化为 对角标准型实现。 设系统的传递函数为:
令 则上式变为
第二节 传递函数与动态方程的关系
式中: 则 令
Ci lims i W s
s i
则得
i
i
i
对上式取拉氏变换
第二节 传递函数与动态方程的关系
i
或写作
第二节 传递函数与动态方程的关系
上述状态方程的状态变量描述有如下特点: (1)矩阵A对角线上的元素为传递函数的极点,其余元素
全为零,各状态变量间没有耦合,彼此是独立的。
(2)矩阵b是一列向量,其元素均为1;矩阵C为一行向量, 它的元素为W(s)极点的留数。
第二节 传递函数与动态方程的关系
其中
D为m×r型矩阵
m×r
Wij s 为第i个输出与第j个输入间的传递函数。
第二节 传递函数与动态方程的关系
求系统的传递函数。 例9-2 已知系统的动态方程式如下,
解:
-
=
-
第二节 传递函数与动态方程的关系
二、由传递函数列写动态方程 设线性定常系统微分方程的一般形式为:
y为系统的输出量,u为系统的输入量,初始条件为零, 对上式取拉氏变换,得系统的传递函数为: -
9章状态空间分析

状态空间分析法举例
例1求图示机械系统的状态空间表达式
外力 u(t)
K ---弹性系数 m
牛顿力学
阻 尼 系 数
b
y(t) u(t )
位移
m y y b ky
令
x1 y
x2 y
动态方程如下
x1 x2
k b 1 x2 y y y u (t ) m m m
k b 1 x1 x2 u (t ) m m m
y x1
状态空间表达式为:
x 1 x 2
0 1 x 0 1 b u k 1 x m m 2 m
x1 y 1 0 x2
1 0 0 a1
0 1 0 a2
0 0 1 an 1
0 0 b 0 0
c 1 0 0
例1设
...
y 5y 8y 6 y 3u
求(A,B,C,D)
.
..
(可加性), H (u1 ) H (u1 ) (齐次性),则该系统 称为线性的,否则为非线性. 定常性:1)定义: Qa -位移算子
2)一个松弛系统当且仅当对任何输入u和任意 实数 , 均有 y Hu HQau Qa Hu Qa y
u (t ) Qau(t ) u(t )
a0 a1 a2
0
y 1
0
x1 0 x 2 x3
作业
系统微分方程为
...
y 2 y 5 y 18 y 3u
..
第9章-状态空间分析法讲解学习
由于 xt0 和 vt0 表征系统在 t t0 时刻的状态,
故称它们为初始状态变量。
第一节 状态变量的描述
f t 已知 x t 0
计算出任意
t t0 时 ,xt 和 vt
v t0
系统具有记忆功能
结论:已知系统的初始状态和 t t0 时刻的输入,
就能唯一地确定系统未来的状态
式称为输出方程。 单输出线性定常系统输出方程的一般形式可表示为
y t C 1 x 1 t C 2 x 2 t C n x n t d t u
它表示系统的输出由两部分所组成:一部分是状态 变量的线性组合;另一部分是输入的直接传输。把上式 写成向量矩阵式为
y(t)C x(td)(tu )
C为系统的输出矩阵,对于单输出系统,C为1*n型行向量; D为入直接影响输出的传输系数。
第一节 状态变量的描述
3、单输入单输出系统的状态空间表达式 状态方程与输出方程合在一起称为系统状态空间表达式,
又称系统的动态方程。 4、状态模型图
单入单出系统的状态图
第一节 状态变量的描述
5、多输入、多输出线性定常系统的状态空间表达式
第9章-状态空间分析法
第9章 状态空间分析法
9.1 状态变量描述 9.2 传递函数与动态方程的关系 9.3 线性定常连续系统状态方程的解 9.4 线性定常离散系统的动态方程式 9.5 线性定常系统的能控性 9.6 线性定常系统的能观性 9.7 对偶性原理 9.8 状态观测器及其应用 9.9 李雅铺诺夫第二方法
第一节 状态变量的描述
状态变量的定义: 动力学系统的状态是表征系统全部行为的一组相互
独立的变量,组成这个变量组的元素称为状态变量。 3、状态向量的定义:
《自动控制原理》系统数学描述的两种基本类型
线性定常系统 在线性系统的状态空间表达式中,若系数矩阵 A(t), B(t),C(t), D(t)或 G(k), H (k),C(k), D(k) 的各元素都是常数,则称该系 统为线性定常系统,否则为线性时变系统。线性定常系统状态空间 表达式的一般形式为
.
x(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
应注意到在向量、矩阵的乘法运算中,相乘顺序不允许任意颠倒。
状态空间分析法 在状态空间中以状态向量或状态变量描述系 统的方法称为状态空间分析法或状态变量法。
状态空间分析法的优点是便于采用向量、矩阵记号简化数学描 述,便于在数字机上求解,容易考虑初始条件,能了解系统内部状 态的变化特性,适用于描述时变、非线性、连续、离散、随机、多 变量等各类系统,便于应用现代设计方法实现最优控制、自适应控 制等。
这里所谓的系统是指由一些相互制约的部分构成的整体,它可 能是一个由反馈闭合的整体,也可能是某一控制装置或受控对象。 本章中所研究的系统均假定具有若干输入端和输出端,如图9-1所 示。图中方块以外的部分为系统环境,环境对系统的作用为系统输
T
入,系统对环境的作用为系统输出;二者分别用向量u = [u1,u2 ,...,u p ] 和y = [ y1, y2 ,..., yq ] T表示 ,它们均为系统的外部变量。描述系统内部 每个时刻所处状况的变量为系统的内部变量,以向量 x = [x1, x2 ,..., xn ] T 表示。系统的数学描述是反映系统变量间因果关系和变换关系的一 种数学模型。
第九章 状态空间分析方法基础.ppt

上一页 下一页
§9-1 控制系统的状态空间描述
的、液压的、热力的等等。根据其物理定律,如基尔霍夫定 律、牛顿定律、能量守恒定律、热力学定律等,即可建立系统 的状态方程;当指定系统的输出后,可写出系统的输出方程。
3)利用输出反馈和调整系统的开环增益,只能使闭环极点沿 着一定得根轨迹移动,而利用状态反馈能使闭环系统任意配置 极点。这说明,状态反馈比一般的输出反馈对系统性能的综合
上一页 下一页
§9-6 状态反馈与状态观测器
更为方便。但在实际上实现起来,状态反馈比输出反馈要来的 复杂。
4)对单输入单输出系统,在一般情况下,利用状态反馈使闭 环系统极点与又性能指标给出的希望极点相一致的方法,以达 到改善系统性能的目的,是行之有效的。但状态反馈只能改变 极点的位置,却不能改变系统极点的个数和系统零点的位置, 有时单靠状态反行综合。
上一页 返回
§9-3 线性离散系统状态空间表达式
一、线性离散系统的状态空间表达式 线性定常离散系统状态空间表达式的结构图如图9-16所
示。 二、线性定常离散系统状态方程的解
1.迭代法求解 迭代法是一种递推的数值解法,其思路是:利 用初始时刻t0=0(即k=0)时的x(0)和u(0)求x(1);再根据求出的 x(1)和给定的u(1)求x(2);如此逐步迭代,即可求得所需的 x(k)。此法适于在计算机上求解。
上一页 下一页
§9-1 控制系统的状态空间描述
1.系统状态空间表达式的非唯一性 2.系统特征值的不变性及系统的不变量 对线性定常系统, 系统的特征值决定了系统的基本特性。 3.化状态方程为对角线规范型 化状态方程为某种形式的规 范型,是通过非奇异变化来实现的,所以求取该非奇异变化矩 阵是解决状态方程转化为某些规范型的关键。 4.化状态方程为约当规范型 五、状态空间表达式与传递函数阵间的变换
线性系统的状态空间分析法
e(t)
1/L
x1
x1 x2
x2
e0 (t )
1/C
-R/L -1/LC
解法2.
选取 则有
x1 i
x2 idt
x 1
R L
x1
1 LC
x2
1 L
e(t)
x 2 x1
x 1
x
2
1RL
1
LC 0
b0 - an
- an-1
-a2
x1
-
a1
x
2
xn
x1
b0u bn
bn-1
b1
x2
xn
在 一 般 情 况 下b0 0则 得 到
x1
y bn
bn-1
b1
x2
xn
y cx
输出方程
0 1 0 0
A
0
0 1 0
- a n
an1
a1
0
B
0
1
系统矩阵
输入矩阵
C [1 00] 输出矩阵
状态变量图
u
+
Xn
Xn-1
-a1 -a2
-an-1
X2
X1=y
-an
例1.设控制系统的运动方程为 y(2) 3 y 2 y u
试写出该系统的状态空间表达式。方框图如下:
状态空间分析方法

②
③ ④
基本要求
⑤ 能将可控系统 化为可控标准形。能将不可
控系统进行可控性分解。
⑥ 熟练掌握全维状态观测器的公式和设计方法,
熟练掌握由观测器得到的状态估计值代替状 态值构成的状态反馈系统, 可进行闭环极点 配置和观测器极点配置。
⑦ 正确理解李雅普诺夫方程正定对称解存在的
条件和解法, 能通过解李雅普诺夫方程进行 5 稳定性分析。
(t ) L
1
sI A
1
2et e2t t 2 t 2 e 2 e
12
二、系统的状态空间表达式
单输入-单输出线性定常系统
y
n
an1 y
n1
an 2 y
n 2
a0 y u
y ( n1) (0) 和 (0) 、… 、 若给出 (t=0) 时的初值 y (0) 、y ut , t 0 时就可确定系统的行为。
18
x ( t ) 代入方程 x Ax 将 可得
b1 2b2t kbk t k 1 A(b0 b1t bk t k )
方程两边系数必相等, 即 b1 Ab0
1 1 2 b2 Ab1 A b0 2 2 1 1 3 b3 Ab2 A b0 3 3 2 1 k bk A b0 k!
30
例 求下述系统状态的时间响应
控制量u为单位阶跃函数。
1 0 0 x x u 2 3 1
解:由
状态转移矩阵
s3 ( s 1)(s 2) 1 [ sI A] 2 ( s 1)(s 2)
1 ( s 1)(s 2) s ( s 1)(s 2)
状态空间分析法
状态空间分析法一、内容概要《状态空间分析法》是一篇介绍状态空间理论及其应用的分析文章。
本文首先简要概述状态空间分析法的概念及其相关领域的研究背景。
接着阐述状态空间分析法的理论基础,包括其基本原理、数学工具以及相关技术的理论基础。
然后介绍状态空间分析法在不同领域中的应用实例,包括物理系统、控制系统、信号处理、通信系统等领域的应用情况。
文章还将探讨状态空间分析法的优势与局限性,以及未来可能的发展方向和潜在应用。
对全文进行总结,强调状态空间分析法在科学研究、工程实践等领域的重要性和价值。
1. 介绍状态空间分析法的概念及其在工程、科学、经济等领域的应用状态空间分析法是一种强大的数学工具,广泛应用于工程、科学和经济等多个领域。
本文将详细介绍状态空间分析法的概念及其在各个领域的应用。
状态空间分析法是一种以系统状态为研究对象的数学分析方法。
它以系统的状态变量为核心,通过对状态变量的描述和分析,揭示系统的行为模式和内在规律。
状态空间分析法通过构建状态空间模型,将复杂的系统问题转化为数学模型,便于进行理论分析和数值计算。
在状态空间中,系统的状态可以通过一系列的状态变量来描述,这些状态变量随时间变化,反映了系统的动态行为。
工程领域:在控制工程、信号处理等领域中,状态空间分析法被广泛应用于分析和设计动态系统。
通过构建系统的状态空间模型,可以方便地分析系统的稳定性、响应特性和控制性能。
此外状态空间分析法还可以用于故障诊断和系统识别等领域。
科学领域:在物理学、生物学和医学等自然科学领域,状态空间分析法同样发挥着重要作用。
例如在量子力学和电路分析中,系统的状态可以通过状态空间模型来描述,从而揭示系统的内在规律和特性。
此外在生物医学信号处理中,状态空间分析法也被广泛应用于生物电信号的分析和处理。
经济领域:在经济和金融领域,状态空间分析法被用于分析和预测经济系统的动态行为。
通过构建经济模型的状态空间表示,可以分析经济增长、市场波动和金融风险等问题,为经济决策提供支持。
状态空间分析法
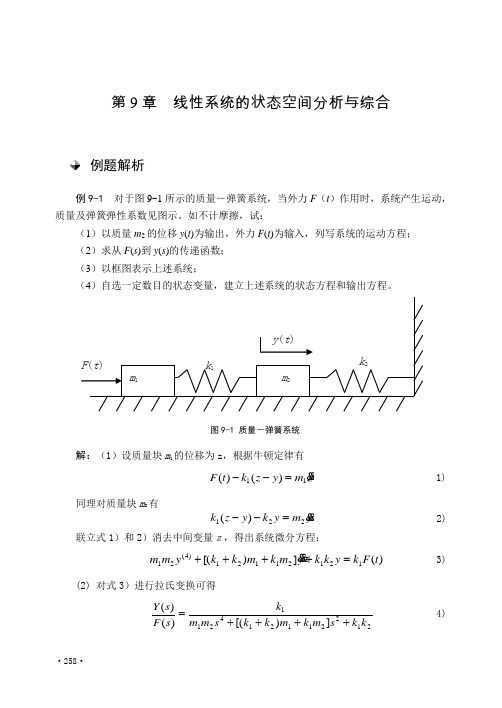
·258·第9章 线性系统的状态空间分析与综合例题解析例9-1 对于图9-1所示的质量-弹簧系统,当外力F (t )作用时,系统产生运动,质量及弹簧弹性系数见图示。
如不计摩擦,试:(1)以质量m 2的位移y (t )为输出,外力F (t )为输入,列写系统的运动方程; (2)求从F (s )到y (s )的传递函数; (3)以框图表示上述系统;(4)自选一定数目的状态变量,建立上述系统的状态方程和输出方程。
图9-1 质量-弹簧系统解:(1)设质量块m 1的位移为z ,根据牛顿定律有zm y z k t F 11)()(=-- 1) 同理对质量块m 2有y m y k y z k 221)(=-- 2) 联立式1)和2)消去中间变量z,得出系统微分方程: )(])[(12121121)4(21t F k y k k ym k m k k ym m =++++ 3) (2) 对式3)进行拉氏变换可得212211214211])[()()(k k s m k m k k s m m k s F s Y ++++=4)·259·(3) 对式(1)进行拉氏变换可得 121`11)()()(k s m s F s Y k s Z +=+ 5) 同样处理式2)有21221)()(k k s m k s Z s Y ++=6) 由式5),式6)可以画出系统结构图,如图9-2所示。
图9-2 系统结构图(4)设状态变量z x xz x ===211y x xy x ===433 由式1) x m k zx 112-== 11311)(m t F x m k ++ 由式2) 12132214x m kx m k k yx ++-== 因此有)(0010001000000011221221111t F m x m k k m k m k mk x⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+--= []x y 0100=·260·例9-2 在图9-3所示系统中,若选取x 1,x 2 ,x 3作为状态变量,试列写其状态空间表达式,并写成矩阵形式.图9-3解: 由结构图可得⎪⎪⎩⎪⎪⎨⎧==+=-+=-11313221)1()(2)3()2x y sx x x s s x x x s x u (整理可得系统状态空间方程表达式⎪⎪⎪⎩⎪⎪⎪⎨⎧=-=+--==132.321.23.132232x y x x x u x x x x x写成矩阵的形式[]x y u x x 001020320032100=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=例9-3 设系统微分方程为u u u y y yy 1588147++=+++ 系统初始条件为零,试:(1)采用传递函数直接分解法,建立系统的状态空间表达式,并画出状态图; (2)采用传递函数并联分解法,建立系统的状态空间表达式,并画出状态图。
状态空间分析法

第9章 线性系统的状态空间分析与综合重点与难点一、基本概念1.线性系统的状态空间描述(1)状态空间概念状态 反映系统运动状况,并可用以确定系统未来行为的信息集合。
状态变量 确定系统状态的一组独立(数目最少)变量,它对于确定系统的运动状态是必需的,也是充分的。
状态向量 以状态变量为元素构成的向量。
状态空间 以状态变量为坐标所张成的空间。
系统某时刻的状态可用状态空间上的点来表示。
状态方程 状态变量的一阶导数与状态变量、输入变量之间的数学关系,一般是关于系统的一阶微分(或差分)方程组。
输出方程 输出变量与状态变量、输入变量之间的数学关系。
状态方程与输出方程合称为状态空间描述或状态空间表达式。
线性定常系统状态空间表达式一般用矩阵形式表示:⎩⎨⎧+=+=DuCx y Bu Ax x (9.1) (2)状态空间表达式的建立。
系统状态空间表达式可以由系统微分方程、结构图、传递函数等其他形式的数学模型导出。
(3)状态空间表达式的线性变换及规范化。
描述某一系统的状态变量个数(维数)是确定的,但状态变量的选择并不唯一。
某一状态向量经任意满秩线性变换后,仍可作为状态向量来描述系统。
状态变量选择不同,状态空间表达式形式也不一样。
利用线性变换的目的在于使系统矩阵A 规范化,以便于揭示系统特性,利于分析计算。
满秩线性变换不改变系统的固有特性。
根据矩阵A 的特征根及相应的独立特征向量情况,可将矩阵A 化为三种规范形式:对角形、约当形和模式矩阵。
(4)线性定常系统状态方程解。
状态转移矩阵)(t φ(即矩阵指数Ate )及其性质:(9.8)i . I =)0(φii .A t t A t )()()(φφφ== iii. )()()()()(122121t t t t t t φφφφφ±=±=+iv. )()(1t t -=-φφv. )()]([kt t k φφ=vi. )( ])exp[()exp()exp(BA AB t B A Bt At =+= vii. )( )ex p()ex p(11非奇异P P At PAPt P --= 求状态转移矩阵)(t φ的常用方法:拉氏变换法 =)(t φL -1])[(1--A sI (9.2)级数展开法+++++=k k At t A k t A At I e !12122 (9.3) 齐次状态方程求解 )0()()(x t t x φ= (9.4)非齐次状态方程式(9.1)求解⎰-+=tBu t x t t x 0d )()()0()()(τττφφ (9.5) (5)传递函数矩阵及其实现传递函数矩阵)(s G :输出向量拉氏变换式与输入向量拉氏变换式之间的传递关系D B A sI C s G +-=-1)()( (9.6)传递函数矩阵的实现:已知传递函数矩阵)(s G ,找一个系统},,,{D C B A 使式(9.6)成立,则将系统},,,{D C B A 称为)(s G 的一个实现。
第9章 状态空间分析法

例1:设系统用二阶微分方程表示,y ay by u(t)
a、b为常数,u(t)为已知。
方程的解:特征方程 r1≠r2(实根)。
r2+ar+b=0的根为r1、r2,
通解 y(t)=c1er1t+c2er2t+y*,
y(t)即为系统的运动
C1则、yC(2t为)就待唯定一常确数定,。如果已知系统的两个初始条件,
0
ф(t):状态转移矩阵, ф(t)=eAt
特性:
ф(0)=I; ф(t-τ)=ф(t)ф(τ); Ф(t2-t0)=ф(t2-t1)ф(t1-t0); Ф-1(t)=ф(-t)。
8.3 系统的能控性和能观测性
子式与秩
• 在矩阵中,任取k行和k列,由这些行和列交点上 的k2个元素按原有顺序构成的一个k阶行列式, 称为矩阵一个k阶子式。
如t=t0时,y(t)的数值y(t0)、ý(t0)已知,就可求出C1、 C2,y(t)就唯一确定。
因此,对于上述系统,在已知输入u(t)的情况下,只 要在某一初始时刻的t0时的y(t0)、ý(t0)值为已知, 则在t ≥t0时系统的运动情况y(t)就可以确定。
在该系统中,如果仅知道y(t0)或ý(t0),则只能求出C1、 C2中某一个,就无法唯一确定y(t)。
a0 s n
则
Y (s) (bms(nm) bm1s(nm1) b1s(n1) b0sn )E(s)
U (s) (1 an1s1 a1s(n1) a0sn )E(s)
E(s) U (s) (an1s1 an2s2 a1s(n1) a0sn )E(s)
8.2 连续系统状态方程的解法
d3y dt3
8
d2y dt 2
9
考研必备之自动化专业 自控原理 第九章 状态空间分析法答案-计算题
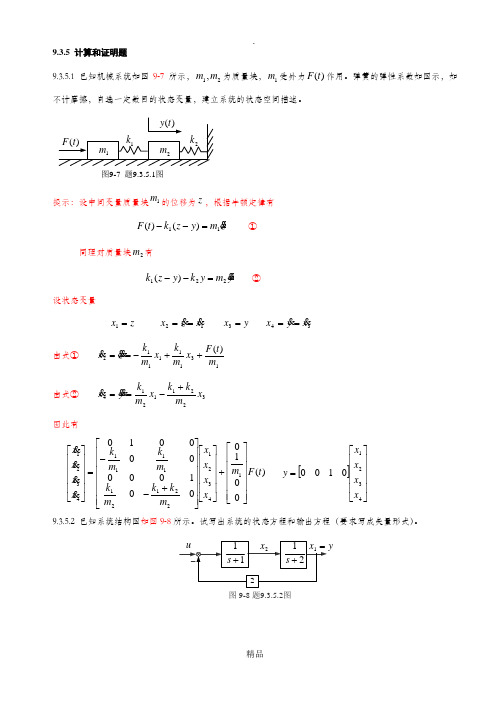
9.3.5 计算和证明题9.3.5.1 已知机械系统如图9-7所示,21,m m 为质量块,1m 受外力)(t F 作用。
弹簧的弹性系数如图示,如不计摩擦,自选一定数目的状态变量,建立系统的状态空间描述。
图9-7 题9.3.5.1图提示:设中间变量质量块1m 的位移为z ,根据牛顿定律有z m y z k t F 11)()( ①同理对质量块2m 有y m y k y z k 221)( ②设状态变量z x 1 12x z x y x 3 34x y x由式① 13111112)(m t F x m k x m k z x由式② 32211214x m k k x m k y x因此有)(001000100000001143212212111114321t F m x x x x m k k m k m k m k x x x x43210100x x x x y 9.3.5.2 已知系统结构图如图9-8所示。
试写出系统的状态方程和输出方程(要求写成矢量形式)。
y 图 9-8 题9.3.5.2图提示: xy u x x 011012129.3.5.3 已知系统的微分方程,试建立其相应的状态空间描述,并画出相应的状态结构图。
(1)u u u y y y y 86375 (2)u u u y y y y 23375提示:(1) x u x x 168100573100010 y ,状态结构图略 (2) ux u x x54110057310001y ,状态结构图略。
9.3.5.4判断下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A 阵。
(1)t t t t t sin cos 0cos sin 0001)(Φ (2)tt e e t 220)1(211)(Φ 提示:(1)不是状态转移矩阵,因为I )0(Φ。
(2)是。
2010)(0t t A Φ 9.3.5.5 线性系统u x x101000 ,11)0(x ,在单位阶跃输入时系统的响应x (t)。
状态空间分析法的特点及其应用
状态空间分析法的主要特点及其应用1.引言60年代以前,研究自动控制系统的传统方法 主要使用传递函数作为系统的数学描述,研究对象是 SISO 系统,这样建立起来的理论就是现在所说的“古典控制理论”。
随着宇航和生产技术的发展及电子计算机的出现,控制系统日渐复杂(MIMO ,时变,不确定,耦合,大规模),传统的研究方法难以适应新的形势。
在 50s'后期,Bellman 等人提议使用状态变量法,即状态空间法来描述系统,时至今日,这种方法已成为现代控制理论的基本模型和数学工具。
所谓状态空间是指以状态变量n 21X X X ,为轴所构成的n 维向量空间。
这样,系统的任意状态都可以用状态空间中的一个点表示。
利用状态空间的观点分析系统的方法称为状态空间法,状态空间法的实质不过是将系统的运动方程写成一阶微分方程组,这在力学和电工上早已使用,并非什么新方法,但用来研究控制系统时具有如下优点。
1、适用面广:适用于 MIMO 、时变、非线性、随机、采样等各种各样的系统,而经典法主要适用于线性定常的 SISO 系统。
2、 简化描述,便于计算机处理:可将一阶微分方程组写成向量矩阵方程, 因而简化数学符号,方便推导,并很适合于计算机的处理,而古典法是拉氏变换法,用计算机不太好处理。
3、内部描述:不仅清楚表明 I-O 关系,还精确揭示了系统内部有关变量及初始条件同输出的关系。
4、有助于采用现代化的控制方法 :如自适应控制、最优控制等。
上述优点便使现代控制理论获得了广泛应用,尤其在空间技术方面还有极大成功。
状态空间法的缺点:1、不直观,几何、物理意义不明显:不象经典法那样, 能用 Bode 图及根轨迹进行直观的描述。
对于简单问题,显得有点烦琐。
2、对数学模型要求很高:而实际中往往难以获得高精度的模型,这妨碍了它的推广和应用。
2.状态空间分析法在部分系统中的应用2.1状态空间分析法在PWM 系统中的应用状态空间分析法不仅适用于时变系统(例如PWM 系统),而且可以将其简化,同时便于计算机处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Y = CX
系统的状态方程和输出方程合起来称为系统的状态空间 表达式,或称状态空间描述。 表达式,或称状态空间描述。 对于前例,其状态空间描述为: 对于前例,其状态空间描述为:
& X = AX + bu Y = CX
多输入多输出系统的状态空间表达式为: 多输入多输出系统的状态空间表达式为: 系统的状态空间表达式为
§9.2 传递函数与动态方程的关系
由于一个系统既可以用传递函数(微分方程)来描述,又 由于一个系统既可以用传递函数(微分方程)来描述, 可以用动态方程来描述。因此这两种描述间必然有着内在联系。 可以用动态方程来描述。因此这两种描述间必然有着内在联系。
du1 (t ) C1 dt = i (t ) − i2 (t ) C duc (t ) = i (t ) 2 2 dt u1 (t ) − uc (t ) i2 (t ) = R2 u (t ) − u1 (t ) i (t ) = r R1 y = uc
D U
+
B
+
& X
x
+
∫
A
Y
C
+
四、状态空间表达式的模拟结构图 模拟结构图用来反映系统各状态之间的信息传递关系。 模拟结构图用来反映系统各状态之间的信息传递关系。
五、状态空间表达式的特点: 状态空间表达式的特点:
1、状态变量的选择不是唯一的,选择不同的状态变量,就得 状态变量的选择不是唯一的,选择不同的状态变量, 到不同的状态变量描述方程。但是不论选择哪一组状态变量, 到不同的状态变量描述方程。但是不论选择哪一组状态变量, 一个 n 阶系统只能有 n 个状态。这 n 个状态: x1(t), 个状态。 个状态: x2(t), … , xn(t)构成了系统变量中线性无关的一个极大变 (t)构成了系统变量中线性无关的一个极大变 量组。 量组。 2、状态空间描述是系统“输入-状态-输出”诸变量间的时 状态空间描述是系统“输入-状态-输出” 域描述,揭示了系统的全部信息。因面比传递函数描述更为 域描述,揭示了系统的全部信息。 全面、完善。 全面、完善。 4、系统状态变化是一个运动过程,用微分方程进行描述;而 系统状态变化是一个运动过程,用微分方程进行描述; 输出方程为代数方程。 输出方程为代数方程。
第九章 状态空间分析法
经典控制理论传递函数描述方法的不足之处: 经典控制理论传递函数描述方法的不足之处: 系统模型为单输入单输出系统; 系统模型为单输入单输出系统; 单输入单输出系统 忽略初始条件的影响; 忽略初始条件的影响; 不包含系统的所有信息; 不包含系统的所有信息; 无法利用系统的内部信息来改变系统的性能。 无法利用系统的内部信息来改变系统的性能。 复杂的时变、非线性、多输入-多输出系统 复杂的时变、非线性、多输入- 的问题,需要用对系统内部进行描述的新方法- 的问题,需要用对系统内部进行描述的新方法- 状态空间分析法。 状态空间分析法。
y = i = x2
x1 y = [0 1] x2
均为输出, uc , i均为输出,则
y1 = uc = x1 y2 = i = x2
二、状态空间表达式: 状态空间表达式:
y1 1 0 x1 y = 0 1 x 2 2
u u du1 (t ) ur (t ) − u1 (t ) u1 (t ) − uc (t ) 1 1 C1 = − & u1 = − − u1 + c + r dt R1 R2 C1 R1 C1 R2 C1 R2 C1 R1 ⇒ du (t ) u (t ) − uc (t ) 1 1 C2 c = 1 & uc = u1 − uc dt R2 C2 R2 C2 R2 y = uc
b11 K b1r B= M O M b L b nr n1
u1 u U = 2 M ur
r维输入 向量
y1 y Y = 2 M ym
输出矩阵 m×r维
m维输 出向量
c11 K c1n C = M O M c L cmn m1
du 1 & uc = c = i dt c i = di = − 1 u − R i + 1 u & c dt L L L
& uc 0 向量矩阵表示形式: & 向量矩阵表示形式: i = − 1 L
令
uc 0 + 1 u R − L i L
直接传递 矩阵 m×r维
d11 K d1r D= M O M d L d mr m1
三、状态空间描述的状态图 单线表示一维信号,双线表示多维信号。 单线表示一维信号,双线表示多维信号。既反映了输入 对系统内部状态的因果关系, 对系统内部状态的因果关系,由反映了内部状态对外 部输出的影响。 部输出的影响。
3、状态空间:以状态变量x1,x2,…xn为坐标轴,组成的n维空 状态空间:以状态变量x 为坐标轴,组成的n 间称为状态空间。 间称为状态空间。状态空间中的每一点都代表了状态变量 的唯一的、特定的一组值。状态随时间的变化过程, 的唯一的、特定的一组值。状态随时间的变化过程,则构 成了状态空间中的一条轨迹,这条轨迹称为状态轨迹。 成了状态空间中的一条轨迹,这条轨迹称为状态轨迹。 4、状态方程:由系统的状态变量构成的一阶微分方程组称 状态方程: 为状态方程。状态方程反映了输入与状态变量间的关系。 为状态方程。状态方程反映了输入与状态变量间的关系。
& X = AX + BU Y = CX + DU
x1 其中: 其中: x2 X= M xn
输入矩阵 控制矩阵 n×r维 × 维
N维向量 维向量
a11 K a1n A= M O M a L a nn n1
系统矩阵 n×n方阵 × 方阵
& X = AX + bu
5、输出方程:系统输出与状态变量间的函数关系。例如, 输出方程:系统输出与状态变量间的函数关系。例如, 前例中, 为输出, 前例中,若取 uc 为输出,则有 y = uc = x1 写出矩阵形式: 写出矩阵形式:
x1 y = [1 0] x2
若指定 i 为输出,则 为输出, 若指定
§9.1 状态变量描述
一、基本定义
先看一个RLC电路的例子 先看一个RLC电路的例子 图中, 图中,u-输入变量 列写微分方程: 列写微分方程:
d uc C dt = i L di + Ri + u = u c dt
R
u
L
C 图1-1
uc
d 2uc du 消去中间变量后, 消去中间变量后,得: LC + RC c + uc = u dt dt
1 C
x1 = uc x2 = i
& x1 0 x = − 1 &2 L x1 0 + 1 u R − L x2 L
1 C
则其变为
进一步令
0 x1 X = , A = 1 x2 − L
例:写出双 例:写出双T网络 的状态方程:
i
ur
R1
i1
u1
R2
i2
i2
uc
u r ( s ) − u1 ( s ) I (s) = R1 1 u1 ( s ) = [ I ( s ) − I 2 ( s )] ⋅ sC 1 I ( s ) = u1 ( s ) − u C ( s ) 2 R2 消除中间变量: 消除中间变量: I ( s ), u1 ( s ), I 2 ( s ) 1 u (s ) = I (s ) ⋅ 2 C sC 2 uc ( s ) 1 G(s) = = u r ( s ) R1 R2C1C2 s 2 + ( R1C1 + R2C2 + R1p; u1 = − − u1 + c + r C1 R1 C1 R2 C1 R2 C1 R1 1 1 & uc = u1 − uc C2 R2 C2 R2 y = uc
1 1 uc 1 1 − − − 1 − & x1 C1 R1 C1 R2 C1 R2 C1 R1 C1 R2 &= = x x + C1 R1 ur & 1 1 x2 0 − C2 R2 C2 R2 y = x2 = [ 0 1] x
0 , b = 1 R − L L
1 C
则可写为: 则可写为:
& X = AX + bu
1、状态变量:足以完全表征系统运动状态的最小个数的一 状态变量: 组变量称为状态变量。如果给定了t=to时刻这组变量值, t=to时刻这组变量值 组变量称为状态变量。如果给定了t=to时刻这组变量值, t>=to时输入的时间函数 那么,系统在t>=to 时输入的时间函数, t>=to的任何瞬 和 t>=to时输入的时间函数,那么,系统在t>=to的任何瞬 间的行为就完全确定了。 间的行为就完全确定了。 2、状态向量:以状态变量为元所组成的向量,称为状态向量。 状态向量:以状态变量为元所组成的向量,称为状态向量。 (t)、 (t)……x (t)是系统一组状态变量 是系统一组状态变量。 如x1(t)、x2(t)……xn(t)是系统一组状态变量。则状态向 量为: 量为: x1 ( t ) x (t ) T X ( t ) = 2 或 X = x1 ( t ) , x 2 ( t )... x n ( t ) ] ... xn (t )