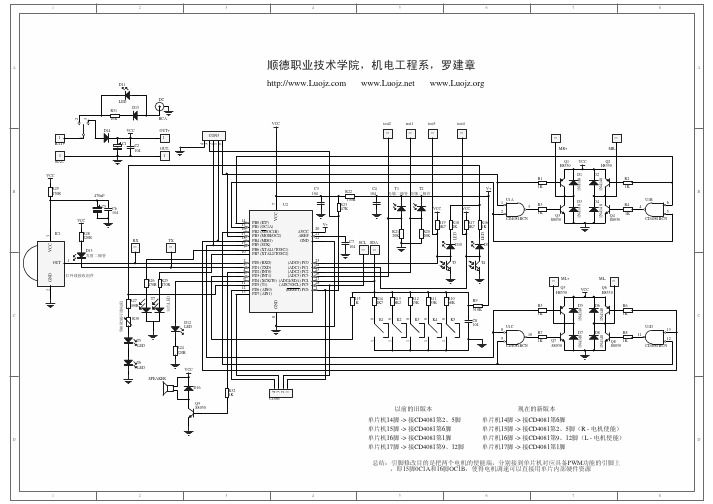
最简单的循迹小车电路图
小车循迹电路设计方案
小车循迹电路设计方案小车循迹电路设计方案一、设计需求设计一款小车循迹电路,使其能够自动寻路,沿着黑线行驶。
二、设计方案1. 传感器选择选择红外线传感器作为寻线传感器。
红外线传感器能够感知黑线的反射光,从而确定小车的位置。
2. 电路连接将红外线传感器与单片机连接。
传感器的输出信号经过单片机的处理,控制小车的运动。
3. 运动控制根据传感器输出的信号,确定小车需要向左还是向右转弯。
如果传感器探测到黑线,小车保持直行;如果传感器没有探测到黑线,小车向右转弯,以寻找黑线。
4. 电源供应为了保证小车的稳定运行,选择适合的电源供应方式。
可以使用电池供电,电池电压适宜,容易携带。
三、电路图见附件。
四、硬件选型1. 单片机:选择一款性能较好的单片机,如ATmega328P,具有较强的处理能力和丰富的外设接口。
2. 传感器:选择高灵敏度的红外线传感器,如TCRT5000,可感知黑线的反射光。
3. 驱动电机:选择合适的直流电机作为小车的驱动装置,可根据小车的重量和负载情况选择合适的电机转速。
4. 电源:选择适合的电池供电,如锂电池或镍氢电池,电压稳定,容量适宜。
五、测试与优化完成电路连接后,进行测试。
将小车放置在黑线上,观察小车能否自动寻路、沿着黑线行驶。
根据测试结果,对电路进行优化,如调整红外线传感器的灵敏度、增加过滤电容等,以提高小车的稳定性和准确性。
六、总结通过以上的设计方案,可以实现小车循迹电路的基本功能。
在实际应用中,还可以添加其他功能,如避障功能、自动停车等,以提升小车的性能和实用性。
附件:电路连接图[图片]。
简易循迹小车装配图文资料讲解

简易循迹小车装配图文教程一.电子元件装配顺序为由低到高,元件尽量紧贴电路板表面安装。
1.电阻的装配:注意色环的认识,区分好四色环与五色环的差别。
2.安装IC,注意IC的缺口方向。
3.安装可调电阻、开关、晶体管(发光管、三极管),注意所有晶体管都是有方向的。
4.安装电解电容和,注意电解电容的引脚方向,短脚为负,对应插到电路板有阴影的方向。
二.机械部分的安装1.安装302A齿轮,将35mm长的车轴与302A齿轮用力套上,并移动到约到中心的位置。
2.找出4个蓝色三通和4枚圆头自带垫2.3*6自攻螺丝(PW A2.3*6)。
3.先将内侧的两个三通用螺丝固定到电路板上。
4.将车轴和齿轮套入三通中,并移动齿轮位置,使齿轮在电路板的卡槽中,车轴刚好超出三通多一点,不超过1mm。
5.将另外两个三通套入车轴中并用螺丝固定到电路板上。
6.将蜗杆用力套入电机轴中,并压到接近电机轴承的位置,找出6-12枚2*3mm的圆头机丝螺丝用于固定电机。
7.将电机用螺丝固定到电路板上,一般每个电机固定3枚螺丝就OK了。
8.将车轮用力套入车轴上,并移动到接近电路板的位置。
(注意用力技巧,可以将车轴的另一端先靠到桌面等固定物上,适当用力敲打车轮到合适位置。
)9.将5*20的螺丝加配套螺母固定到电路板上,然后套上不锈钢盖形螺母作为万向轮使用。
三.安装剩余电路部分。
1.安装循迹红外发射与接收管,注意有正负方向的区别,使其高度略低于万向轮约3-5mm。
2.安装电池盒,电池盒通过不干胶粘到电路板上,注意位置必须准确,确保一次性成功,不可进行二次粘接。
连接电机导线,可以将过长的导线剪到合适的长度,新剥开的线头先要捻头并烫锡处理,线头长度不超过2mm。
电池盒用不干胶固定到电路板上,需特别注意电源的正负极不要接反,电机反转可以交换两条线的位置。
套件默认提供的是2节5号电池盒,可用2节碱性电池供电的(套件中不提供,需自备)。
3.为减小红外发射管对接收管直射光的干扰,可以在接收管上套上3mm热缩管。
循迹小车电路分析2PPT优秀版
年12月12日
平凉信息工程学校电工电子教研室
•LM393集成电路
LM393是双路电压比较器集成电路,由两个独 立的精密电压比较器构成。它的作用是比较两个 输入电压,根据两路输入电压的高低改变输出电 压的高低。输出有两种状态:接近开路或者下拉 接近低电平,LM393采用集电极开路输出,所以 必须加上拉电阻才能输出高电平。
年12月12日
平凉信息工程学校电工电子教研室
•电机驱动部分:通过控制三极管的导通截止,驱动减速直流电机转动,并使转向
指示灯发光。
•发光二极管 •年12月12日
•年12月12日
•值在有无明光显照减(小本用。手电或路物遮中住光所)用的情的况下二万极用表管测得是阻发值大光,有二光极照表管针指,示电阻 •基于分数字别电路为的 型红外发光二极管和 型发光二极管。
确。若测得阻值超过该电阻的误差 范围、阻值无限大,阻值为0或阻值 不稳,说明该电阻器已坏。
年12月12日
平凉信息工程学校电工电子教研室
•电位器的检测
首先测量两固定端之间电阻值是否正常, 若为无限大或为零欧,或与标称相差较大, 超过误差允许范围,都说明已损坏;电阻体 阻值正常,再将万用表一只表笔接电位器滑 动端,另一只表笔接电位器(可调电阻)的 任一固定端,缓慢旋动轴柄,
•发光二极管检测
发光二极管具有单向导电性,使 用R×10k档可测出其正、反向电阻。 一般正向电阻应小于50k欧姆,反向 电阻应大于200k欧姆。若正、反向 电阻均为零,说明内部击穿短路。 若正、反向电阻均为无穷大,证明 内部开路。
年12月12日
平凉信息工程学校电工电子教研室
• 三极管
本电路所用三极管型号为 8550,它是一种低电压,大电流, 小信号的PNP型硅三极管 集电极 -基极电压Vcbo:-40V ,工作温度: -55℃ 到+150℃ ,主要用途:开 关应用,射频放大。
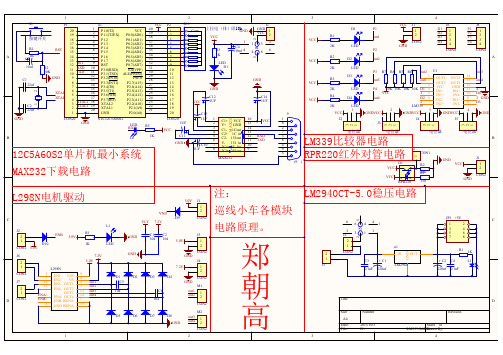
巡线小车各模块电路原理图-郑朝高
上拉电(排)阻10k GND
1 C4 10uf 4
2
VCC
GND 1 VCC 2 1 4
5 5 2
P1 out1 GND
3 6
3
R3 1K LED D1
out2
GND GND C12 1UF
LED D4 LED 1
VCC C13 1UF
9 1 2 3 4 5 6 7 8 C1+ VCC V+ GND C1- 1Cout C2+ 1C in C2- 151out V- 151 in 2Cout 25 1in 2Cin 251out MAX232 (9 ) 16 15 14 13 12 11 10 9 VCC 1 6 2 7 3 8 4 9 5
VCC J2
GNDVCC J5
GND
CON20
电位器
电位器
电位器
B
RXD TXD
C10 1UF
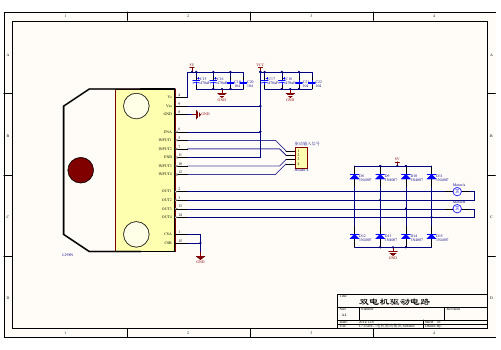
12C5A60S2单片机最小系统 MAX232下载电路 L298N电机驱动
C L1 J2 2 1 CON2 5.0V J6 2 1 CON2 J7 2 1 D CON2 5 7 10 12 ENA6 ENB 11 8 5.0V L298N EN1 VSS EN2 VS EN3 OUT1 EN4 OUT2 OUT3 ENA OUT4 ENB ISENA GND ISENA 9 4 2 3 13 14 1 15 D1 C5 104 D2 D3 D4 GND 7.2V 7.2V GND GND ENB D10 5.0V 1K LED R1 GND C1 104 C2 104 VCC 7.2V
Print Date:
41550
#Column Name #Column Error:Footprint Name Error:Comment #Column Name Error:LibRef #Column Name Error:Designator
智能小车循迹模块

智能小车红外循迹巡线传感器原理与应用电路2011-09-27 11:24智能小车是指由单片机控制的,可以修改程序的,在程序的控制下,能够自由移动,自动完成特定功能的小车。
它集计算机技术,软件编程,自动控制,传感器技术,机械结构于一体,是学习信息技术,机器人的最佳载体。
小车循迹指的是小车在白色地板上循黑线行走,通常采取的方法是红外探测法。
也可用CCD,CMOS 摄像头方案,光电优点:1.电路设计相对简单2.检测信息速度快3.成本低缺点:1.道路参数检测精度低、种类少2.检测距离短3.耗电量大4、容易受外界光线干扰摄像头优点:1.检测前瞻距离远2.检测范围宽3.检测道路参数多缺点:1.电路相对设计复杂2.检测信息更新速度慢3.软件处理数据较多红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射强度的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。
单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。
常用的红外探测元件有红外发光管,红外接收管,红外接收头,一体化红外发射接收管。
红外线是不可见光线。
所有高于绝对零度(-273.15℃)的物质都可以产生红外线。
人的眼睛能看到的可见光按波长从长到短排列,依次为红、橙、黄、绿、青、蓝、紫。
其中红光的波长范围为0.62~0.76μm;紫光的波长范围为0.38~0.46μm。
比紫光波长还短的光叫紫外线,比红光波长还长的光叫红外线。
红外发光二极管:外形和普通发光二极管LED相似,发出红外光。
管压降约1.4v,工作电流一般小于20mA。
为了适应不同的工作电压,回路中常常串有限流电阻。
红外线发射管有三个常用的波段,850NM、875NM、940NM。
根据波长的特性运用的产品也有很大的差异,850NM波长的主要用于红外线监控设备,875NM主要用于医疗设备,940NM波段的主要用于红外线控制设备。
寻迹避障小车原理

循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal 输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,signal输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择范围为3 – 5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线内侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。
自动循迹小车方案

小车的总体原理框图
循迹小车硬件部分设计
供电电源 主控电路 显示电路(时间,里程) 声光报警 寻线电路 驱动电路
供电电源
单片机系统、路径识别的传感器、电机等均需 要5V电源.
在此我们可以考虑利用稳压管来实现。例如 LM2940、LM7805
主控电路
主控电路主要用AT89S51单片机来实现。 AT89S51是一个低功耗,高性能CMOS 8位单片机,片内含4k Bytes ISP(In-system
1、4k Bytes Flash片内程序存储器; 2、128 bytes的随机存取数据存储器(RAM); 3、32个外部双向输入/输出(I/O)口; 4、2个中断优先级、2层中断嵌套中断; 5、6个中断源; 6、2个16位可编程定时器/计数器; 7、2个全双工串行通信口; 8、看门狗(WDT)电路; 9、片内振荡器和时钟电路; 10、与MCS-51兼容; 11、全静态工作:0Hz-33MHz; 12、三级程序存储器保密锁定; 13、可编程串行通道; 14、低功耗的闲置和掉电模式。
驱动电路
对于电动车来说,其驱动轮的驱动电机的选择就 显得十分重要 .
在此我们可以选着三极管构成桥式驱动电路。或 者选着采用L298N集成电路模块来复擦写1000次的Flash只读程序存储器,器件采用ATMEL公司的高密度、 非易失性存储技术制造,兼容标准MCS-51指令系统及80C51引脚结构,芯片内集成了通用8位中央 处理器和ISP Flash存储单元,AT89S51在众多嵌入式控制应用系统中得到广泛应用。 主要性能特点
显示电路
智能电动小车显示可以选择液晶显 示屏,显示当前小车的速度和里程 数据。
声光报警
在检测到金属以及小车到达一定位置时,都需要 有声光报警。在这里采用LED以及蜂鸣器来实现。
循迹小车基本原理

寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
智能小车红外循迹巡线传感器原理与应用电路

智能小车红外循迹巡线传感器原理与应用电路智能小车是指由单片机控制的,可以修改程序的,在程序的控制下,能够自由移动,自动完成特定功能的小车。
它集计算机技术,软件编程,自动控制,传感器技术,机械结构于一体,是学习信息技术,机器人的最佳载体。
小车循迹指的是小车在白色地板上循黑线行走,通常采取的方法是红外探测法。
也可用CCD,CMOS 摄像头方案,光电优点:1.电路设计相对简单 2.检测信息速度快 3.成本低缺点:1.道路参数检测精度低、种类少2.检测距离短3.耗电量大4、容易受外界光线干扰摄像头优点:1.检测前瞻距离远 2.检测范围宽3.检测道路参数多缺点:1.电路相对设计复杂2.检测信息更新速度慢3.软件处理数据较多红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射强度的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。
单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。
常用的红外探测元件有红外发光管,红外接收管,红外接收头,一体化红外发射接收管。
红外线是不可见光线。
所有高于绝对零度(-273.15℃)的物质都可以产生红外线。
人的眼睛能看到的可见光按波长从长到短排列,依次为红、橙、黄、绿、青、蓝、紫。
其中红光的波长范围为0.62~0.76μm;紫光的波长范围为0.38~0.46μm。
比紫光波长还短的光叫紫外线,比红光波长还长的光叫红外线。
红外发光二极管:外形和普通发光二极管LED相似,发出红外光。
管压降约1.4v,工作电流一般小于20mA。
为了适应不同的工作电压,回路中常常串有限流电阻。
红外线发射管有三个常用的波段,850NM、875NM、940NM。
根据波长的特性运用的产品也有很大的差异,850NM波长的主要用于红外线监控设备,875NM主要用于医疗设备,940NM波段的主要用于红外线控制设备。
通用技术:智能循迹小车的总体设计1

上一节我们已经分析了智能循迹小 车的“眼睛”和“大脑”,接下来我们 把智能循迹小车的“身体”整体安装。
电路图回顾
SignalA 5 3.3KR VCC 4 0 1R U1ALM393D 1 VCC 48 23 AB 2L34 KKK 1RR1R1R VCCVCC 白 0 1 0 3R VCC
任务一:智能循迹小车的整体电路原理图的设计
1、智能循迹小车的两只“眼睛”情况分析。
当左边的光敏电阻进入黑线区 域,说明小车右偏,此时SignalA信 号输出高,而SignalB信号输出低, 而为了使小车能继续沿黑线前进, 左边电机需要马上停止转动,而右 边电机继续转动,以此来调整方向; 若右边的光敏电阻进入黑线区域, 则情况完全相反即可。
IN4148 s8550 M VCC LeftMotor SignalA 6 3.3KR VCC 5 0 1R U1ALM393D 1 VCC 48 23 AB 2L34 KKK 1RR1R1R VCCVCC 白 0 1 0 3R VCC
任务二:在面包板套件上,搭接电路,调试。
Байду номын сангаас
2、智能循迹小车的整体分析
如图所示为智能小车右边部 分的检测电路,当右边RL在白色 区域时,SignalA为低电平,右 边的电机转动,当右边的RL在黑 色区域时,SignalA为高电平右 边的电机停止转动,此时左边的 电机在转动,所以小车向右调整 方向。而智能小车左边部分的检 测电路原理相同
IN4148 s8550 M VCC RightMotor SignalA 6 3.3KR VCC 5 0 1R U1ALM393D 1 VCC 48 23 AB 2L34 KKK 1RR1R1R VCCVCC 白 0 1 0 3R VCC
循迹小车电路图
VCC 3 PILM780503
COR1 R1
PIR101
PIR302
A
4
PIR301
1K COU1 U1
PIU101 PIU102 PIU104
COR4 R4
PIU103 PIR402 PIR401
PIU204 PIU201
1K
COU2A U2A
TL084 1 PIU201
3 PIU203 2 PIU202 11
P30 P31
PISTC1010 PISTC1011
PIU206
11
PIR1303
PIR1302 PIR1301
CO±ÜÕÏÐźŠ避障信号
NLVCC01 VCC_1 PI±ÜÕÏÐźÅ01 1 NLGND01 GND_1 PI±ÜÕÏÐźÅ02 2 NLOUT1 OUT1 PI±ÜÕÏÐźÅ03 3 NLOUT2 OUT2 PI±ÜÕÏÐźÅ04 4 NLOUT3 OUT3 PI±ÜÕÏÐźÅ05 5 NLOUT4 OUT4
PIU2012 PIU2013
12 13
红外对管D
GND_1
PIR2402 PIR2401
20K
PID701 PID702
C14 COC14 D7 COD7 LED0
OUT4
RESET
COR21 R21 1K COU6 U6
4
NLRESET
复位模块
COR22 R22
PIR2202 PIR2201
VCC Title Size A4 Date: File: 3
U2C COU2C
PID601 PID602
PIC1 01 PIC1 02
PIY102 COY1 PIY10
循迹小车的组装说明(压缩)
硬件连接示意图
循迹小车程序截图
循迹小车操作说明
将小车接线连接好,左右电机分别连接在 主板所示的两个端口。 前进探测传感器左右传感器分别接在输入 口0、1口。 打开ZB2软件,打开所给程序资料,下载 到主板运行,若小车不能走黑线调整传感 器、电机的连接口。
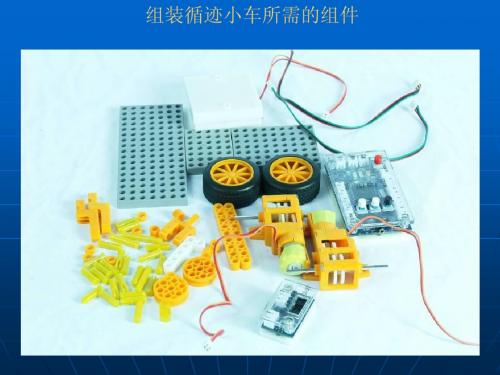
组装循迹小车所需的组件循迹小车车身的组装注意连接扣底板连接放置的位置万向轮的组装注意连接扣的长度连杆与万向轮支架连接的方向小车驱动电机的组装注意电机安装的位置车轮组件的组装万向轮的装配传感器固定装置的组装注意连接口之型连杆连接的方向小车行走探测传感器的组装循迹小车全观图电源部分与控制电路板组装未说明详见公司网站说明硬件连接示意图循迹小车程序截图循迹小车操作说明循迹小车操作说明将小车接线连接好左右电机分别连接在将小车接线连接好左右电机分别连接在主板所示的两个端口
组装循迹小车所需的组件
循迹小车车身的组装
(注意连接扣、底板连接放置的位置)
万向轮的组装
(注意连接扣的长度连杆与万向轮支架连接的方向)
小车驱动电机的组装
(注意电机安装的位置)
车轮组件的组装
万向轮的装配
传感器固定装置的组装
(注意连接口、之型连杆连接的方向)
小车行走探测传感器的组装
循迹小车全观图
智能循迹小车的原理图