Computing the pipelined phaserotation FFT
基于强化学习的部分线性离散时间系统的最优输出调节

基于强化学习的部分线性离散时间系统的最优输出调节
庞文砚;范家璐;姜艺;LEWIS Frank Leroy
【期刊名称】《自动化学报》
【年(卷),期】2022(48)9
【摘要】针对同时具有线性外部干扰与非线性不确定性下的离散时间部分线性系统的最优输出调节问题,提出了仅利用在线数据的基于强化学习的数据驱动控制方法.首先,该问题可拆分为一个受约束的静态优化问题和一个动态规划问题,第一个问题可以解出调节器方程的解.第二个问题可以确定出控制器的最优反馈增益.然后,运用小增益定理证明了存在非线性不确定性离散时间部分线性系统的最优输出调节问题的稳定性.针对传统的控制方法需要准确的系统模型参数用来解决这两个优化问题,提出了一种数据驱动离线策略更新算法,该算法仅使用在线数据找到动态规划问题的解.然后,基于动态规划问题的解,利用在线数据为静态优化问题提供了最优解.最后,仿真结果验证了该方法的有效性.
【总页数】12页(P2242-2253)
【作者】庞文砚;范家璐;姜艺;LEWIS Frank Leroy
【作者单位】东北大学流程工业综合自动化国家重点实验室;德克萨斯大学阿灵顿分校
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于T-S模糊模型离散时间非线性网络系统的输出跟踪控制
2.基于平均驻留时间切换离散线性系统的降阶输出反馈控制
3.基于Q学习算法的随机离散时间系统的随机线性二次最优追踪控制
4.一般非线性离散时间系统的输出调节
5.基于零和博弈的部分未知线性离散系统多智能体分布式最优跟踪控制
因版权原因,仅展示原文概要,查看原文内容请购买。
计算机科学与技术专业使用阈值技术的图像分割等毕业论文外文文献翻译及原文
毕业设计(论文)外文文献翻译文献、资料中文题目: 1.使用阈值技术的图像分割2.最大类间方差算法的图像分割综述文献、资料英文题目:文献、资料来源:文献、资料发表(出版)日期:院(部):专业:计算机科学与技术班级:姓名:学号:指导教师:翻译日期: 2017.02.14毕业设计(论文)题目基于遗传算法的自动图像分割软件开发翻译(1)题目Image Segmentation by Using ThresholdTechniques翻译(2)题目A Review on Otsu Image Segmentation Algorithm使用阈值技术的图像分割 1摘要本文试图通过5阈值法作为平均法,P-tile算法,直方图相关技术(HDT),边缘最大化技术(EMT)和可视化技术进行了分割图像技术的研究,彼此比较从而选择合的阈值分割图像的最佳技术。
这些技术适用于三个卫星图像选择作为阈值分割图像的基本猜测。
关键词:图像分割,阈值,自动阈值1 引言分割算法是基于不连续性和相似性这两个基本属性之一的强度值。
第一类是基于在强度的突然变化,如在图像的边缘进行分区的图像。
第二类是根据预定义标准基于分割的图像转换成类似的区域。
直方图阈值的方法属于这一类。
本文研究第二类(阈值技术)在这种情况下,通过这项课题可以给予这些研究简要介绍。
阈分割技术可分为三个不同的类:首先局部技术基于像素和它们临近地区的局部性质。
其次采用全局技术分割图像可以获得图像的全局信息(通过使用图像直方图,例如;全局纹理属性)。
并且拆分,合并,生长技术,为了获得良好的分割效果同时使用的同质化和几何近似的概念。
最后的图像分割,在图像分析的领域中,常用于将像素划分成区域,以确定一个图像的组成[1][2]。
他们提出了一种二维(2-D)的直方图基于多分辨率分析(MRA)的自适应阈值的方法,降低了计算的二维直方图的复杂而提高了多分辨率阈值法的搜索精度。
这样的方法源于通过灰度级和灵活性的空间相关性的多分辨率阈值分割方法中的阈值的寻找以及效率由二维直方图阈值分割方法所取得的非凡分割效果。
基于自注意力机制和多尺度输入输出的医学图像分割算法
基于自注意力机制和多尺度输入输出的医学图像分割算法医学图像分割是医学图像处理中一项重要的任务,其目标是将医学图像中的不同组织或结构进行准确的边界提取。
传统的医学图像分割方法面临着许多挑战,例如复杂的图像背景、不同器官之间的相似性、噪声干扰等。
为了解决这些问题,近年来出现了基于自注意力机制和多尺度输入输出的医学图像分割算法。
自注意力机制是一种新兴的机器学习技术,它能够自动地从输入数据中学习到图像的重要信息和关联性,并将这些信息应用于分割任务中。
自注意力机制通过对图像的自注意力矩阵进行建模,能够捕捉到不同图像区域之间的依赖关系和相关性,提高了医学图像分割的准确性。
多尺度输入输出是通过在不同尺度上对输入数据进行处理和分析,以获取更多的图像信息。
医学图像通常具有不同的层次结构和尺度特征,因此使用多尺度输入可以更好地捕捉到图像中的细节和边界信息。
同时,通过将多尺度的特征进行融合和整合,可以得到更准确的分割结果,提高分割算法的性能。
基于自注意力机制和多尺度输入输出的医学图像分割算法主要包括以下几个步骤:1. 数据预处理:对医学图像进行预处理,包括去噪、归一化和增强等操作。
这些操作可以提高图像的质量和清晰度,减少噪声干扰。
2. 特征提取:使用卷积神经网络(CNN)等方法对医学图像进行特征提取,得到图像在不同尺度上的特征表示。
这些特征包括颜色、纹理、形状等信息,能够帮助算法更好地理解和分析图像。
3. 自注意力机制:通过自注意力机制对提取的特征进行建模和整合。
自注意力机制能够自动学习到图像中的重要信息和关联性,并将这些信息应用于分割任务中。
通过自注意力机制,算法可以更准确地捕捉到图像中不同区域之间的依赖关系和相关性。
4. 多尺度输入输出:通过在不同尺度上对输入数据进行处理和分析,获取更多的图像信息。
可以使用图像金字塔、多尺度卷积等方法对输入图像进行多尺度处理,在不同尺度上提取特征。
同时,通过将多尺度的特征进行融合和整合,得到更准确的分割结果。
caimr计算方法
caimr计算方法
CAIMR(细胞自动化图像分割与测量)是一种用于细胞图像分割和测量的计
算方法,广泛应用于生物医学研究和生物医学图像处理领域。
CAIMR方法基于细
胞自动化技术,利用计算机算法对细胞图像进行分割和测量,从而实现对细胞形态、数量和分布等特征的定量分析。
在CAIMR方法中,首先需要对细胞图像进行预处理,包括去除噪声、增强对
比度、边缘检测等操作,以便更好地识别和分割细胞。
接着,利用图像分割算法对细胞图像进行分割,将细胞从背景中分离出来,从而准确测量细胞的大小、形状、颜色等特征。
最后,通过对分割后的细胞图像进行分析和测量,可以得到关于细胞数量、分布、形态特征等方面的定量数据。
CAIMR方法的优点在于可以实现对大量细胞图像的快速、准确的分割和测量,不仅提高了细胞研究的效率,还可以避免主观因素对分析结果的影响。
此外,CAIMR方法还可以应用于不同类型的细胞图像,适用于多种细胞分析的需求。
总的来说,CAIMR(细胞自动化图像分割与测量)是一种基于细胞自动化技
术的计算方法,能够实现对细胞图像的分割和测量,为生物医学研究和生物医学图像处理提供了强大的工具和方法。
通过CAIMR方法,可以更好地理解和分析细胞
的形态、数量和分布等特征,促进细胞研究的进展和应用。
NEURAL NETWORK COMPUTATION METHOD, DEVICE, READABL

专利名称:NEURAL NETWORK COMPUTATIONMETHOD, DEVICE, READABLE STORAGEMEDIA AND ELECTRONIC EQUIPMENT发明人:Zhuoran ZHAO,Zhenjiang WANG申请号:US17468136申请日:20210907公开号:US20220076097A1公开日:20220310专利内容由知识产权出版社提供专利附图:摘要:The present application discloses a neural network computation method includes determining the size of the first feature map obtained when the processorcomputes the present layer of the neural network before performing convolution computation on the next layer of the neural network; determining a convolution computation order of the next layer according to the size of the first feature map and the size of the second feature map for a convolution supported by the next layer; performing convolution computation instructions from the next layer based on the convolution computation order. Exemplary embodiments in the present disclosure decrease the interlayer feature map data access overhead and reduce the idle time of a computation unit by leaving out the storage of the first feature map and the loading process of the second feature map.申请人:HORIZON (SHANGHAI) ARTIFICIAL INTELLIGENCE TECHNOLOGY CO., LTD.地址:Shanghai CN国籍:CN更多信息请下载全文后查看。
用于生命科学的人工智能定量相位成像方法
用于生命科学的人工智能定量相位成像方法English:Artificial intelligence (AI) has revolutionized the field of quantitative phase imaging (QPI) in life sciences by enabling high-throughput and accurate analysis of complex biological samples. AI-based QPI methods integrate advanced machine learning algorithms with computational imaging techniques to extract quantitative information from phase images with unprecedented precision and speed. These methods leverage deep learning models to perform tasks such as cell segmentation, classification, and tracking, enabling researchers to study dynamic cellular processes and disease progression with minimal human intervention. One example of AI-enabled QPI is label-free cell classification, where AI algorithms can accurately differentiate between different cell types based on their phase images, providing valuable insights into cellular morphology and function. Furthermore, AI-based QPI approaches can also improve the sensitivity and specificity of quantitative phase measurements, allowing for more accurate quantification of cellular and subcellular features. Overall, the integration of AI with QPI holds great potential for advancing our understanding of complexbiological systems and accelerating the development of novel diagnostic and therapeutic strategies in the life sciences.中文翻译:人工智能(AI)已经彻底改革了生命科学中的定量相位成像(QPI)领域,通过实现对复杂生物样品的高通量和准确分析。
基于动态规划提取信号小波脊和瞬时频率
基于动态规划提取信号小波脊和瞬时频率
王超;任伟新
【期刊名称】《中南大学学报(自然科学版)》
【年(卷),期】2008(39)6
【摘要】提出一种基于动态规划提取信号小波脊和瞬时频率的方法,其基本思路是:对信号进行连续复Morlet小波变换,由变换得到的小波系数的局部模极大值初步提取其小波脊;为降低噪音影响,在初步提取的各小波脊附近选取部分小波系数,通过施加罚函数平滑噪音干扰引起的小波脊变化的不连续性,将小波脊的提取问题转变为最优化问题,采用动态规划方法计算得到新的小波脊;根据小波尺度与频率的关系由提取的小波脊识别出信号的瞬时频率.将提出的方法运用于含噪调频信号进行数值模拟分析和实测索冲击响应信号分析.研究结果表明,基于连续小波变化的模极大值可以有效提取信号小波脊和瞬时频率;采用施加罚函数的方法可有效降低噪音的影响;基于动态规划的方法可有效提高计算效率.
【总页数】6页(P1331-1336)
【作者】王超;任伟新
【作者单位】中南大学,土木建筑学院,湖南,长沙,410075;中南大学,土木建筑学院,湖南,长沙,410075
【正文语种】中文
【中图分类】TN911.6
【相关文献】
1.基于小波脊的UM71信号瞬时特征提取 [J], 林王仲;戴云陶
2.基于改进小波脊提取算法的数字信号瞬时频率估计方法 [J], 汪赵华;郭立;李辉
3.基于二进小波变换的实信号的多尺度Hilbert变换和瞬时频率提取 [J], 蔡毓;刘贵忠;侯兴松
4.基于SWT的自适应多脊提取的滚动轴承瞬时频率估计 [J], 李延峰;韩振南;王志坚;武学峰
5.基于最大坡度法提取非平稳信号小波脊线和瞬时频率 [J], 刘景良;任伟新;王超;黄文金
因版权原因,仅展示原文概要,查看原文内容请购买。
基于序贯设计和高斯过程模型的结构动力不确定性量化方法
基于序贯设计和高斯过程模型的结构动力不确定性量化方法万华平;张梓楠;周家伟;任伟新
【期刊名称】《浙江大学学报(工学版)》
【年(卷),期】2024(58)3
【摘要】将直接基于有限元模型的蒙特卡罗方法用于结构动力不确定性量化较耗时,为此采用高斯过程模型取代耗时的有限元模型,提高不确定性量化的计算效率.提出基于序贯设计和高斯过程模型的结构动力不确定性量化方法,通过样本填充准则迭代,选择最优样本点建立自适应高斯过程模型,提升动力不确定性量化精度.在建立的自适应高斯过程模型框架下,动力特性统计矩的高维积分转化为一维积分,进而进行解析计算.采用2个数学函数来展示自适应高斯模型的拟合过程,高斯过程模型的拟合精度随着迭代次数增加而明显增加.将所提方法应用于柱面网壳的固有频率统计矩计算,计算精度与蒙特卡罗法的结果相当.与传统高斯过程模型对比,所提算法的计算效率优势明显,表明所提方法具有计算精度高和效率高的优势.
【总页数】8页(P529-536)
【作者】万华平;张梓楠;周家伟;任伟新
【作者单位】浙江大学建筑工程学院;浙江大学平衡建筑研究中心;浙江大学建筑设计研究院有限公司;深圳大学土木与交通工程学院
【正文语种】中文
【中图分类】TB114
【相关文献】
1.基于渗透系数序贯高斯模拟的水库渗漏量不确定性分析
2.基于Stochastic Kriging模型的不确定性序贯试验设计方法
3.基于序贯高斯条件模拟的土壤重金属含量预测与不确定性评价——以宜兴市土壤Hg为例
4.基于广义协同高斯过程模型的结构不确定性量化解析方法
5.基于高斯过程模型的定性定量因子混合补充试验设计方法
因版权原因,仅展示原文概要,查看原文内容请购买。
改进鲸鱼算法优化支持向量机实现乳腺癌预测

改进鲸鱼算法优化支持向量机实现乳腺癌预测
高涛;袁德成
【期刊名称】《现代电子技术》
【年(卷),期】2024(47)11
【摘要】为了更好地通过人体肥胖的相关指数预测乳腺癌的存在,以抵抗素、葡萄糖、年龄和身体质量指数作为数据特征构造预测模型,通过研究支持向量机(SVM)的参数对模型的性能影响,提出一种基于自适应机制策略改进的鲸鱼算法,即参数自适应鲸鱼优化算法(PAWOA)用来寻找最优参数。
采用Tent映射对种群位置初始化,引入自适应参数p^(*)代替随机阈值加速收敛速度,针对给定的目标函数对每个搜索个体进行求解,计算适应度后找到全局最优解,增强种群的全局寻优性能。
实验结果表明,优化后的模型精确度提升12.44%,召回率提升13.57%,F_(1)评分提升13.14%。
可见,该预测模型拥有更好的效果可以用于辅助判断乳腺癌。
【总页数】5页(P156-160)
【作者】高涛;袁德成
【作者单位】沈阳化工大学信息工程学院
【正文语种】中文
【中图分类】TN911-34;TP391
【相关文献】
1.改进鲸鱼算法优化混合核支持向量机在径流预测中的应用
2.基于改进鲸鱼算法优化支持向量机的故障诊断的研究与应用
3.改进鲸鱼算法优化的多维度深度极限学
习机短期负荷预测4.基于改进鲸鱼算法优化BP神经网络的煤自燃预测研究5.基于鲸鱼算法优化支持向量机的露天煤矿边坡稳定性预测
因版权原因,仅展示原文概要,查看原文内容请购买。
pcl 法向夹角特征点提取

pcl 法向夹角特征点提取1. 什么是法向夹角特征点?法向夹角特征点是一种局部几何特征,它描述了表面法向向量之间的夹角。
法向夹角特征点可以用来检测表面上的突变、褶皱和边缘等特征。
2. PCL 中的法向夹角特征点提取PCL 中提供了多种法向夹角特征点提取算法,其中最常用的算法是曲率估计算法和主曲率算法。
曲率估计算法曲率估计算法通过计算表面曲率来检测法向夹角特征点。
曲率是曲面法向向量在曲线上变化的程度的度量。
曲率越大,曲面变化越快。
PCL 中提供了多种曲率估计算法,其中最常用的算法是法向向量法。
法向向量法通过计算曲面法向向量在曲线上变化的程度来估计曲率。
主曲率算法主曲率算法通过计算曲面的两个主曲率来检测法向夹角特征点。
主曲率是曲面法向向量在曲线上变化最快的两个方向上的曲率。
PCL 中提供了多种主曲率算法,其中最常用的算法是高斯曲率算法。
高斯曲率算法通过计算曲面高斯曲率来估计主曲率。
3. 法向夹角特征点提取的应用法向夹角特征点提取在计算机视觉和机器人领域有着广泛的应用,其中最常见的应用包括:表面重建法向夹角特征点可以用来重建曲面。
曲面重建是指从一组不规则的点云数据中恢复曲面的过程。
法向夹角特征点可以帮助确定曲面的边界和边缘,从而提高曲面重建的精度。
物体识别法向夹角特征点可以用来识别物体。
物体识别是指从一组图像或点云数据中识别物体的过程。
法向夹角特征点可以帮助确定物体的形状和轮廓,从而提高物体识别的准确率。
机器人导航法向夹角特征点可以用来帮助机器人导航。
机器人导航是指机器人自主地在环境中移动的过程。
法向夹角特征点可以帮助机器人检测障碍物和危险区域,从而提高机器人导航的安全性。
4. 总结法向夹角特征点提取是一种局部几何特征提取技术,它可以用来检测表面上的突变、褶皱和边缘等特征。
PCL 中提供了多种法向夹角特征点提取算法,其中最常用的算法是曲率估计算法和主曲率算法。
法向夹角特征点提取在计算机视觉和机器人领域有着广泛的应用,其中最常见的应用包括表面重建、物体识别和机器人导航。
一种基于注意力机制的轻量级航空电力线分割算法
一种基于注意力机制的轻量级航空电力线分割算法航空电力线的分割一直是一项具有挑战性的任务。
电力线在飞机起降、驾驶及导航中起着至关重要的作用,因此准确地检测和分割电力线至关重要。
针对这一问题,近年来,许多机器学习算法被提出来解决此问题。
其中,一种基于注意力机制的轻量级航空电力线分割算法表现出了较好的性能。
该方法主要分为以下步骤:1.数据预处理:首先,需要对飞行图像进行预处理。
该预处理方法主要包括图像去噪、灰度变换和图像增强等步骤。
2.特征提取:在分割电力线之前,需要提取图像中的特征。
在这种方法中,主要利用了卷积神经网络 (Convolutional Neural Network, CNN)进行特征提取。
利用深度卷积神经网络的多尺度特征提取能力,将提取出的特征加以整合,进而获得更为准确的特征信息。
3.注意力机制:为了更好的获取电力线的位置信息,该方法使用了一种注意力机制。
该机制利用了空间注意力和通道注意力。
空间注意力可以让算法更注重感兴趣的图像区域,而通道注意力可以帮助算法更好的提升图像分类性能。
通过获得特定的空间和通道注意力权重,算法可以更准确地分割出电力线。
4.分割结果:最后,通过对注意力机制的应用和分割操作,可以获得准确的电力线分割结果。
通过与其他方法进行比较,该方法在航空电力线分割任务中表现出了优异的性能。
总之,电力线分割是目前一个热门的机器学习问题,而基于注意力机制的轻量级航空电力线分割算法,通过有效地整合了去噪、特征提取、注意力机制和分割技术等步骤,为准确且高效的航空电力线分割提供了一种新颖的方法。
该算法可以被应用于航空导航、飞行驾驶等领域,具有广泛的应用前景。
量化平面性在有机半导体中的影响
量化平面性在有机半导体中的影响有机半导体的应用十分广泛,包括有机发光二极管(OLED),有机太阳能电池(OPV),有机场效应晶体管(OFET)等等。
与无机半导体相比,有机半导体的优势在于可以对材料结构进行精细的调控,而这其中最为重要的是共轭体系骨架结构的设计。
对于有机半导体分子而言,当所有原子都处于同一平面内时,由于原子轨道之间的交叠最大,电荷传输的效率是最高的。
通常情况下,分子骨架中的各个结构单元可以沿轴向相对旋转,而这对其各原子间的位置关系以及材料的导电性有很大影响。
近年来,人们对有机材料的结构性质关系(structure-property relationship)的理解不断加深。
但目前为止,对于共轭有机分子的平面度(planarity, 及原子排列的平整程度),尤其是如何合理地运用各种已知的结构单元来构建具有特定平面度的分子,都没有系统的研究。
传统的量子化学计算(如结构优化,轨道能计算等)往往只能确定一个分子某种固定构型的性质,对于其各个单元之间相对转动产生的结构变化及其影响则显得无能为力。
近日,麦吉尔大学的Dmitrii Perepichka教授与博士生车宇轩共同提出了以统计学方法来量化有机半导体的平面性的思路。
作者利用密度泛函理论(DFT)计算了各种常见的有机结构基元之间相对旋转的势能面(potential energy s urface, PES),并通过玻尔兹曼分布确定各旋转构象的概率分布。
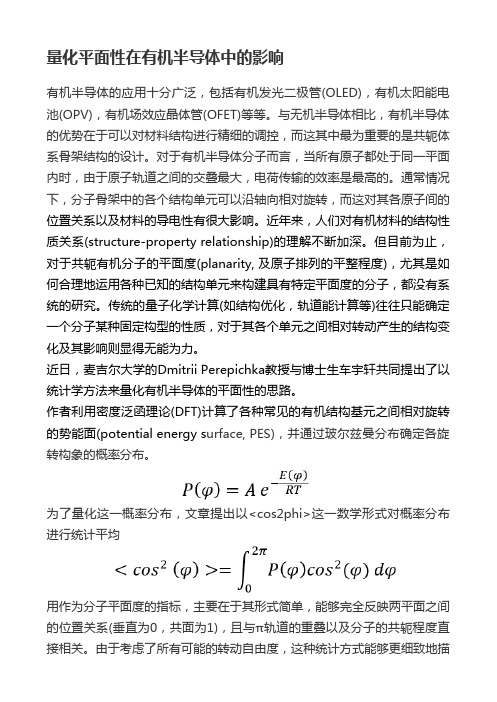
为了量化这一概率分布,文章提出以<cos2phi>这一数学形式对概率分布进行统计平均用作为分子平面度的指标,主要在于其形式简单,能够完全反映两平面之间的位置关系(垂直为0,共面为1),且与π轨道的重叠以及分子的共轭程度直接相关。
由于考虑了所有可能的转动自由度,这种统计方式能够更细致地描述分子实际结构的平面程度。
例如,下图中的红色分子的最低能量最构型虽有所弯曲,但是大部分构象以较为平整的形式存在。
基于自转一阶非连续式微球双平盘研磨的运动学分析与实验研究
第53卷第8期表面技术2024年4月SURFACE TECHNOLOGY·133·基于自转一阶非连续式微球双平盘研磨的运动学分析与实验研究吕迅1,2*,李媛媛1,欧阳洋1,焦荣辉1,王君1,杨雨泽1(1.浙江工业大学 机械工程学院,杭州 310023;2.新昌浙江工业大学科学技术研究院,浙江 绍兴 312500)摘要:目的分析不同研磨压力、下研磨盘转速、保持架偏心距和固着磨料粒度对微球精度的影响,确定自转一阶非连续式双平面研磨方式在加工GCr15轴承钢球时的最优研磨参数,提高微球的形状精度和表面质量。
方法首先对自转一阶非连续式双平盘研磨方式微球进行运动学分析,引入滑动比衡量微球在不同摩擦因数区域的运动状态,建立自转一阶非连续式双平盘研磨方式下的微球轨迹仿真模型,利用MATLAB对研磨轨迹进行仿真,分析滑动比对研磨轨迹包络情况的影响。
搭建自转一阶非连续式微球双平面研磨方式的实验平台,采用单因素实验分析主要研磨参数对微球精度的影响,得到考虑圆度和表面粗糙度的最优参数组合。
结果实验结果表明,在研磨压力为0.10 N、下研磨盘转速为20 r/min、保持架偏心距为90 mm、固着磨料粒度为3000目时,微球圆度由研磨前的1.14 μm下降至0.25 μm,表面粗糙度由0.129 1 μm下降至0.029 0 μm。
结论在自转一阶非连续式微球双平盘研磨方式下,微球自转轴方位角发生突变,使研磨轨迹全覆盖在球坯表面。
随着研磨压力、下研磨盘转速、保持架偏心距的增大,微球圆度和表面粗糙度呈现先降低后升高的趋势。
随着研磨压力与下研磨盘转速的增大,材料去除速率不断增大,随着保持架偏心距的增大,材料去除速率降低。
随着固着磨料粒度的减小,微球的圆度和表面粗糙度降低,材料去除速率降低。
关键词:自转一阶非连续;双平盘研磨;微球;运动学分析;研磨轨迹;研磨参数中图分类号:TG356.28 文献标志码:A 文章编号:1001-3660(2024)08-0133-12DOI:10.16490/ki.issn.1001-3660.2024.08.012Kinematic Analysis and Experimental Study of Microsphere Double-plane Lapping Based on Rotation Function First-order DiscontinuityLYU Xun1,2*, LI Yuanyuan1, OU Yangyang1, JIAO Ronghui1, WANG Jun1, YANG Yuze1(1. College of Mechanical Engineering, Zhejiang University of Technology, Hangzhou 310023, China;2. Xinchang Research Institute of Zhejiang University of Technology, Zhejiang Shaoxing 312500, China)ABSTRACT: Microspheres are critical components of precision machinery such as miniature bearings and lead screws. Their surface quality, roundness, and batch consistency have a crucial impact on the quality and lifespan of mechanical parts. Due to收稿日期:2023-07-28;修订日期:2023-09-26Received:2023-07-28;Revised:2023-09-26基金项目:国家自然科学基金(51975531)Fund:National Natural Science Foundation of China (51975531)引文格式:吕迅, 李媛媛, 欧阳洋, 等. 基于自转一阶非连续式微球双平盘研磨的运动学分析与实验研究[J]. 表面技术, 2024, 53(8): 133-144.LYU Xun, LI Yuanyuan, OU Yangyang, et al. Kinematic Analysis and Experimental Study of Microsphere Double-plane Lapping Based on Rotation Function First-order Discontinuity[J]. Surface Technology, 2024, 53(8): 133-144.*通信作者(Corresponding author)·134·表面技术 2024年4月their small size and light weight, existing ball processing methods are used to achieve high-precision machining of microspheres. Traditional concentric spherical lapping methods, with three sets of circular ring trajectories, result in poor lapping accuracy. To achieve efficient and high-precision processing of microspheres, the work aims to propose a method based on the first-order discontinuity of rotation for double-plane lapping of microspheres. Firstly, the principle of the first-order discontinuity of rotation for double-plane lapping of microspheres was analyzed, and it was found that the movement of the microsphere changed when it was in different regions of the upper variable friction plate, resulting in a sudden change in the microsphere's rotational axis azimuth and expanding the lapping trajectory. Next, the movement of the microsphere in the first-order discontinuity of rotation for double-plane lapping method was analyzed, and the sliding ratio was introduced to measure the motion state of the microsphere in different friction coefficient regions. It was observed that the sliding ratio of the microsphere varied in different friction coefficient regions. As a result, when the microsphere passed through the transition area between the large and small friction regions of the upper variable friction plate, the sliding ratio changed, causing a sudden change in the microsphere's rotational axis azimuth and expanding the lapping trajectory. The lapping trajectory under different sliding ratios was simulated by MATLAB, and the results showed that with the increase in simulation time, the first-order discontinuity of rotation for double-plane lapping method could achieve full coverage of the microsphere's lapping trajectory, making it more suitable for precision machining of microspheres. Finally, based on the above research, an experimental platform for the first-order discontinuity of rotation for double-plane lapping of microsphere was constructed. With 1 mm diameter bearing steel balls as the processing object, single-factor experiments were conducted to study the effects of lapping pressure, lower plate speed, eccentricity of the holding frame, and grit size of fixed abrasives on microsphere roundness, surface roughness, and material removal rate. The experimental results showed that under the first-order discontinuity of rotation for double-plane lapping, the microsphere's rotational axis azimuth underwent a sudden change, leading to full coverage of the lapping trajectory on the microsphere's surface. Under the lapping pressure of 0.10 N, the lower plate speed of 20 r/min, the eccentricity of the holder of 90 mm, and the grit size of fixed abrasives of 3000 meshes, the roundness of the microsphere decreased from 1.14 μm before lapping to 0.25 μm, and the surface roughness decreased from 0.129 1 μm to 0.029 0 μm. As the lapping pressure and lower plate speed increased, the microsphere roundness and surface roughness were firstly improved and then deteriorated, while the material removal rate continuously increased. As the eccentricity of the holding frame increased, the roundness was firstly improved and then deteriorated, while the material removal rate decreased. As the grit size of fixed abrasives decreased, the microsphere's roundness and surface roughness were improved, and the material removal rate decreased. Through the experiments, the optimal parameter combination considering roundness and surface roughness is obtained: lapping pressure of 0.10 N/ball, lower plate speed of 20 r/min, eccentricity of the holder of 90 mm, and grit size of fixed abrasives of 3000 meshes.KEY WORDS: rotation function first-order discontinuity; double-plane lapping; microsphere; kinematic analysis; lapping trajectory; lapping parameters随着机械产品朝着轻量化、微型化的方向发展,微型电机、仪器仪表等多种工业产品对微型轴承的需求大量增加。
分布估计鲸鱼算法
分布估计鲸鱼算法1. 引言分布估计鲸鱼算法是一种用于估计概率分布函数的算法。
它利用鲸鱼的集群行为和迁徙模式来模拟概率分布的形状和参数。
通过对鲸鱼行为的观察和分析,可以得到对概率分布的估计结果,并用于解决各种实际问题。
本文将介绍分布估计鲸鱼算法的原理、应用场景以及算法的优缺点,并提供一个简单的示例来说明算法的具体实现过程。
2. 原理分布估计鲸鱼算法基于鲸鱼的行为模式进行概率分布的估计。
鲸鱼在迁徙过程中会形成集群,集群中的鲸鱼会互相影响和交流,从而形成一种共同行为模式。
这种行为模式可以用于推测概率分布的形状和参数。
算法的基本原理如下:1.初始化种群:随机生成一定数量的鲸鱼,每个鲸鱼代表一个潜在的解。
2.计算适应度:根据鲸鱼的位置和概率分布函数,计算每个鲸鱼的适应度。
3.更新位置:根据当前的位置和适应度,更新鲸鱼的位置。
4.判断终止条件:如果达到预设的终止条件,则停止算法;否则,返回第2步。
5.输出结果:返回适应度最好的鲸鱼作为估计的概率分布函数。
3. 应用场景分布估计鲸鱼算法可以在许多领域中应用,特别是需要对概率分布进行估计的问题。
以下是一些常见的应用场景:•风险分析:通过估计概率分布,可以对风险事件的概率进行评估,从而制定相应的风险管理策略。
•金融建模:在金融领域,分布估计鲸鱼算法可以用于估计股票价格、利率等随机变量的概率分布,从而进行风险评估和投资决策。
•数据挖掘:在数据挖掘中,分布估计鲸鱼算法可以用于对数据集的分布进行建模,从而发现数据中的规律和模式。
•优化问题:在优化问题中,分布估计鲸鱼算法可以用于对目标函数的分布进行估计,从而找到最优解或近似最优解。
4. 算法示例为了更好地理解分布估计鲸鱼算法的具体实现过程,我们以估计正态分布为例进行说明。
假设我们有一组服从正态分布的观测数据,我们希望通过分布估计鲸鱼算法来估计该正态分布的均值和方差。
算法的具体步骤如下:1.初始化种群:随机生成一定数量的鲸鱼,每个鲸鱼的位置表示一个可能的均值和方差的组合。
一种求解作业车间调度的文化粒子群算法
vrec pe n e e ta oe grh o o l tesltnqai u a otes bly egn esedadi btr hnt s oi msnnt ny h o i u t b t s t it. s t h a t i l uo l y l h a i
作 业车间调 度问题 (S ) JP 研究 Ⅳ个 工件在 台机器上 的 加工过程 , 每个工件在各 台机器 上的加 工时 间已知 , 且每个 并
C ^,)=C ^一 , ) ( 1 ( l 1
Cj, (l )=C , 一1 (1k )
,, i 1 =2, n …,
l , k= … , , 2, m
C ( )=C , ( m)
() 5 () 6
丌 = r { m ( ) ( , } } i,V仃∈ a c 矗 仃 =c m) — m n g x Ⅱ
其 中, 5 即为最大完成 时间 , 6 表示 最小化最 大完 成时 式( ) 式( )
间的调度排序方案 。 粒子群优化算法 ( S ) 早是 K n ey等 人受 鸟群 觅食 P0 最 e nd 行 为的启发 , 19 于 95年提 出的一 种生物 进化算 法。P O算法 S
基金项 目:淮安市科技 计划资助项 目( N 0 5 ; S 14 ) 淮安市科技局 资助项 目( A 0 0 2 H G 95 )
作者简介 : 霞(90 )女 , 朱 18一 , 江苏通 州人 , 讲师 , 博士研 究生, 主要研究方向为嵌入 式系统及计算机测控 技术、 计算机应 用、 智能算法(ni04 s l 2 a2
第2 9卷 第 4期 21 0 2年 4月
计 算 机 应 用 研 究
Ap l a in Re e r h o mp tr pi t s ac f c o Co u e s
求解置换流水线调度问题的混合离散果蝇算法
求解置换流水线调度问题的混合离散果蝇算法
郑晓龙;王凌;王圣尧
【期刊名称】《控制理论与应用》
【年(卷),期】2014(031)002
【摘要】针对置换流水线调度问题,提出了一种新颖的混合离散果蝇算法.算法每一代进化包括4个搜索阶段:嗅觉搜索、视觉搜索、协作进化和退火过程.在嗅觉搜索阶段,采用插入方式生成邻域解;在视觉搜索阶段,选择最优邻域解更新个体;在协作进化阶段,基于果蝇个体间的差分信息产生引导个体;在退火操作阶段,以一定概率接受最优引导个体从而更新种群.同时,通过试验设计方法对算法参数设置进行了分析,并确定了合适的参数组合.最后,通过基于标准测试集的仿真结果和算法比较验证了所提算法的有效性和鲁棒性.
【总页数】6页(P159-164)
【作者】郑晓龙;王凌;王圣尧
【作者单位】清华大学自动化系,北京100084;清华大学自动化系,北京100084;清华大学自动化系,北京100084
【正文语种】中文
【中图分类】TP18
【相关文献】
1.求解批量流水线调度问题的离散蜂群算法 [J], 桑红燕;高亮;李新宇
2.基于离散蛙跳算法的零空闲流水线调度问题求解 [J], 王亚敏;冀俊忠;潘全科
3.离散和声求解带启动时间批量流水线调度问题 [J], 潘玉霞;谢光;肖衡
4.求解混合流水线调度问题的离散人工蜂群算法 [J], 李俊青;潘全科;王法涛
5.离散NSGA-Ⅱ求解带有限缓冲区的多目标批量流水线调度问题 [J], 韩玉艳;李俊青;桑红燕;包云
因版权原因,仅展示原文概要,查看原文内容请购买。
基于迭代加权L1正则化的高光谱混合像元分解
行研 究。采 用一 种迭 代加 权 的 L 1正则化 方 法进行 高光谱 混合 像 元 分 解 , 出相 应 的模 型和 算 给 法。通 过 引入 多步加 权 L 优 化 求解 过程 , 1 且根 据 当前 解修 正 下一 步迭代 的权值 , 能更好 地利 用 混合像 元丰 度 系数 的稀疏 性 。试验 结 果表 明 , 于迭代 加 权 L 基 1正 则化 的 高光 谱 混合 像 元 分 解 精度 比基 于传统 L 1正 则化 的 方法 高 , 别适 用 于信 噪 比较 高的高光谱 图像 。 特 关键 词 : 高光谱 ; 混合像 元 分 解 ; 迭代 加权 ; 正则化 中图分 类号 :P 9 T 31 文章 编 号 :0 5 9 3 ( 0 1 0 — 4 1 0 10 — 80 2 1 ) 4 0 3 — 5
K e o ds: p rp cr li g un xng;t r tv i h i g; e u a z to yw r hy e s e ta ma e; mi i i a ie weg tn L1 r g lr ain e i
高光谱遥感 图像具有 很高 的光谱分辨率 , 能在 电磁波谱 的可 见光 、 近红 外 、 中红 外 和 热红 外 波段 范围 内获取许 多非 常窄 的光谱 波段信 息 , 而得 到 从 光谱连续 的影像数据 , 因 d A o e t o fl e r h p rp cr l u mi i g b s d o tr t e w ih e 1 p r i s t d e . n v lmeh d o i a y e s e t n xn a e n i ai e g t d L t n a e v r g l r ai n i p o o e a d t e c re p n ig mo e n lo t m r r s n e . h t o n e u a i t s r p s d, n h o r s o d n d la d a g r h a e p e e td T e meh d i - z o i to u e e e a tp fweg td L p i z t n p o e u e , n s st e v l e o u e ts l t n r d c s s v r lse s o i he 1 o t mia i r c d r s a d u e h a u fc r n ou i o o
计算机视觉算法模型评测及自动化pipeline实践
传统软件测试方法不适用,如何建立新的评测体系
如何质效合一,达到行业领先
CV算法评测难点
VS
难点
思路
4 难点解决方案
解决方案
思路方案
解决方案一:指标映射及主观量化
主观量化 —— 用于效果类评测美妆 – 人脸关键点产品目标描述:妆容不露怯算法质量目标:评测脸各部位妆容在不同权重场景下的准确性、鲁棒性、稳定性质量分数尺度:0~5分对应较差、中等、良好、优秀、完美
CV算法评测pipeline体系 – 链路
CV算法评测pipeline体系
数据可视化
CV算法评测pipeline体系
预期收益
提效
提质
6 展望
准确
高效
智能
CV算法如何评测? - 模型效果评测
原图
美妆效果图
关键点预测与label点图
CV算法如何评测? - 模型性能&竞品对比评测
3 CV算法评测难点
CV算法评测难点
评测点 传统软件评测 CV算法评测
评测对象
软件功能
算法模型
产品目标
客观具体
主观抽象
评测输出
确定
不确定
评测方式
自动化程序
人眼?
1、评测方法上:跟传统软件评测差异大
打分表表头
解决方案二:指标映射及客观量化
不同方向算法分场景、维度映射不同类型客观指标。如:人脸关键点算法:点平均距离、RMSE均方根误差
解决方案三:算法pipeline自动化
三种评测自动化关键节点:模型效果评测模型性能评测竞品对比
从整体算法pipeline寻找自动化提效关键节点。
载流子迁移率计算方法(VASP,ORIGIN)
载流子迁移率计算方法(V A S P,O R I G I N)
-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
计算公式:
半导体物理书上也有载流子迁移率的公式,但是上面的是带有平均自由时间的公式,经过变换推倒,就成了上面的那个公式,因此要用vasp计算的参数有,S l,m e,m d,E l这四个参数,其他的都是常数,可以查询出来带入公式。
参数:S l
,就是需要我们先用vasp计算出声子谱,我们要对声子谱求导,取导带底处的值,对应的就是电子迁移率的S l 所以需要学会怎么使用phonopy
m e
:就是电子的有效质量,要用origin对能带图求二次导,取导带底对应的值。
m d:
mx就是布里渊区X方向的有效质量,my就是y方向的有效质量,先用笔算出G 到K,M向量,然后分别作这两个向量的垂直向量,在这两个向量方向上取20个权重为0的点,放到KPOINTS中,按照以前的方法,算出来的能带就是x方向上的和y方向上的,然后就可以算出x,y方向上的有效质量。
E l
:把公式变形一下,E l,放在一边,其他的放在另一边,δV就是原来晶胞的体积改变量,δE就是对应能量的该变量,V0就是晶胞原来的体积,也就是说,我要把原来的晶胞任意改变一下大小,算出导带底能量的变化量,进而就算出了E l这个量。
以上这四个量算出来之后,带入公式计算就可以得出电子的迁移率公式。
电子迁移率主要受到:声学支波散射,光学支波散射,电离杂质杂质散射的影响,因为后二者没有第一个影响大,所以我们计算的迁移率包含的就是在声学支波散射作用下的迁移率。
(半导体物理书上都很仔细的介绍。
)
2。
快速分形图像编码局部方差算法的改进
快速分形图像编码局部方差算法的改进
何传江;蒋海军;黄席樾
【期刊名称】《计算机仿真》
【年(卷),期】2004(021)006
【摘要】该文提出了快速分形图像编码基于图像块方差的新算法,推广了C. K. Lee 等提出的局部方差算法 (IEEE Trans. Image Process.,1998,7(6):888-891) .新算法增加了两个参数以控制编码速度和解码图像质量.计算机仿真结果显示了算法的有效性:例如,对于256×256×8 Lena图像,相对于全搜索的基本分形编码算法,该文算法(对某些参数值)在编码时间加快23倍的同时,PSNR反而增加0.12dB.
【总页数】4页(P141-144)
【作者】何传江;蒋海军;黄席樾
【作者单位】重庆大学数理学院,重庆400044;重庆大学自动化学院,重庆,400044;重庆大学自动化学院,重庆,400044;重庆大学自动化学院,重庆,400044
【正文语种】中文
【中图分类】TN919.81
【相关文献】
1.基于相关系数的快速分形图像编码算法的改进 [J], 何传江;许晓曾;李高平
2.改进转动惯量特征的快速分形图像编码算法 [J], 李高平;杨军;陈毅红
3.基于改进K-均值聚类的快速分形图像编码算法 [J], 王向阳;于雁春
4.基于局部方差和DCT变换的混合分形图像编码算法 [J], 周一鸣;张超;张曾科
5.基于局部方差的快速分形图像块编码算法 [J], 范策
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Computing the Pipelined Phase-Rotation FFTLanghorne P.Withers,Jr.,John E.Whelchel,David R.O’Hallaron,Peter J.LieuJuly13,1993CMU-CS-93-174School of Computer ScienceCarnegie Mellon UniversityPittsburgh,PA15213David O’Hallaron and Peter Lieu are in the School of Computer Science at Carnegie ngWithers and John Whelchel are with E-Systems,Inc.AbstractThe phase-rotation FFT is a new form of the FFT that replaces data movement with multiplications by constant phasor multipliers.The result is an FFT that is simple to pipeline.This paper reports some fundamental new improvements to the original phase-rotation FFT design,provides a complete description of the algorithm directly in terms of the parallel pipeline,and describes a radix-2implementation on the iWarp computer system that balances computation and communication to run at the full-bandwidth of the communications links,regardless of the input data set size.Supported in part by the Advanced Research Projects Agency,Information Science and Technology Office,under the title "Research on Parallel Computing,"ARPA Order No.7330.Work furnished in connection with this research is provided under prime contract MDA972–90–C–0035issued by ARPA/CMO to Carnegie Mellon University,and in part by the Air Force Office of Scientific Research under Contract F49620–92–J–0131.Also supported in part by an E-Systems IR&D program.Keywords:multicomputers,signal processing,Fast Fourier Transform1.IntroductionThe Fast Fourier Transform(FFT)is an important algorithm with many applications in signal processing and scientific computing.The Whelchel phase-rotation FFT[9]derives from the Pease constant-geometry FFT[7],which itself derives from the original Cooley-Tukey FFT[4]expressed in terms of Kronecker products.The phase-rotation FFT of radix is designed for a pipeline of parallel data channels.At each time step,in each stage,the pipeline carries the next data points,one from each channel,into a Discrete Fourier Transform(DFT)kernel.Unlike earlier pipelined FFT’s[5,6],the phase-rotation FFT has the key property that no data is switched across channels,except within the DFT kernel and at the input and output.The phase-rotation approach extends easily to higher radices,reducing memory and latency while preserving the high throughput and parallel shuffling simplicity of lower radix versions.The phase-rotation FFT has also been extended to a vector-radix,multidimensional parallel-pipeline FFT with the same qualities of the one-dimensional algorithm,and without transposes[10].This paper describes the results of a project to implement the phase-rotation FFT on a parallel computer system.There are three main results:First,the digit-reversing shuffle step in the original version of the phase-rotation FFT[9]is a potential pipeline bottleneck because it requires communication between the data channels.We describe a new version that corrects this problem by using a parallel-pipeline digit-reversing step.Second,although the structure of the phase-rotation FFT is extremely simple,we have learned from experience that generating the appropriate twiddles and shuffle indices from the original matrix formula-tion[9]is quite difficult,even for the designers of the algorithm!To try to help the implementer,we have reformulated the phase-rotation FFT.We present a new set of recipes for generating the twiddles and shuffle indices directly in terms of the parallel pipeline.Finally,we describe mapping strategies for the phase-rotation FFT on the iWarp,a parallel computer system developed by Intel and Carnegie Mellon[1,2].We describe afine-grained approach for an-point radix-2phase-rotation FFT that balances computation and communication to run at the full40Mbytes/sec rate of the iWarp physical links,regardless of the size of the input data sets.Section2introduces the phase-rotation concept.Section3formally defines the improved FFT algorithm. Section4gives the recipes for generating the twiddles and shuffle indices in terms of the parallel pipeline. Finally,Section5describes the full-bandwidth implementation on iWarp.2.The basic ideaThis section introduces the concept of the phase-rotation FFT.Starting with the Pease constant-geometry FFT,we informally derive the pipelined phase-rotation FFT,identifying the key insights along the way.2.1.Constant-geometry FFTFigure1(a)shows theflowgraph for a radix--point decimation-in-frequency(DIF)constant-geometry FFT,with2and8.There are stages.Each stage contains kernels.Each kernel is an operator that performs an-point DFT.For radix2,each kernel inputs two complex numbers and outputs two complex numbers.(For simplicity,twiddles are not explicitly shown in theflowgraph.)Each stage in the constant-geometry FFT performs an identical perfect stride-by-shuffle of its data vector,where.If the data vector is regarded as an array,stored in column-major order, then the perfect shuffle simply transposes it into an array.For example,the following transpose is a stride-by-4perfect shuffle,for8points and radix2:0415 26 370123 4567The data items in example above,labeled by their indices in the original column vector,are regarded as equivalent to a42array composed by a stride-by-4unstacking of the8-point column vector.After the transpose,the24array is equivalent to a new8-point column vector composed by a stride-by-2stacking. As we shall see,this transpose creates difficulties when we try to pipeline the constant-geometry FFT.And it is precisely these difficulties that the phase-rotation FFT addresses.2.2.Pipelining the FFTEach stage of the constant-geometry FFT can be computed on a single processor by pipelining the data. For example,Figure1(b)shows the pipeline for a single stage with radix 2.The pipeline consists of a sequence of operators connected by pipeline segments.Each pipeline segment consists of parallel channels.Each channel carries a stream of data points,which are labeled in this example by their indices from the original column vectors in Figure1(a).For each pipeline segment,the data points in the same position in each stream are known as an-frame,or simply,a frame.For example,in Figure1(b),the first frame in the pipeline segment between and is(0,4),the second frame is(1,5),and so on.At each time step,the twiddle operators()collectively read a frame(one complex number per operator),perform an element-wise complex multiplication,and write the resulting frame.Notice that each stream is operated on independently.Similarly,the kernel operator()reads a frame,computes the radix-kernel,and writes the resulting frame.In this case,the streams are not independent;each data item in the output frame is a function of every data point in the input frame.The twiddle and kernel operators pipeline nicely because during each time step they independently read and write a single number.However,the pipelined shuffle operator()is less well behaved.To produce one output frame,the shuffle operator must read and store the data points from each stream.Thus, requires memory cycles to produce each frame.(Notice that transposes the data directly into an pipeline segment;even starting with data already in an pipeline,still performs“row-to-column”motions.)This is an example of the memory-bank conflict discussed in[8,pp.31-32].The conflict is clear in Figure1(b).To assemble itsfirst output frame,must read both0and4from the upper stream to its left. Then it must read1and5from the lower stream,and so on.twiddles parallel pipeline shufflekerneltwiddlesframe-wise cyclic rotations parallel pipeline shufflekernel pipeline stage 0kernelsstage 1kernels stage 2kernels stride-by-4shuffle stride-by-4shuffle(a)(b)(c)(d)v arying frame-wise cyclic rotations v arying 01234567Figure 1:Derivation of the phase-rotation FFT.(a)Initial con-stant-geometry FFT.(b)Pipelined constant geometry FFT.(c)Pipelined FFTbased on cyclic rotations.(d)Pipelined phase-rotation FFT.0246 13570123 45670257 13460527 4163Figure2:Replacing the perfect shuffle with three simpler shuffles.We would like to replace the troublesome perfect shuffle operation with a parallel-pipeline shuffle,where each stream is read and written independently and in parallel.The next section describes the insights that make this possible.2.3.The phase-rotation conceptThis section describes how to replace the perfect shuffle by a parallel-pipeline shuffle,so that we can access the data streams in parallel.The basic idea is to rotate the data within frames,and then compensate for these motions by phase rotations of the twiddle factors.We begin with a“detour”around the perfect shuffle.That is,wefind a sequence of three simpler shuffles that is equivalent to the perfect shuffle.This idea is shown graphically in Figure2for an-point radix-2 example.Each radix-2pipeline segment is represented as matrix.Each row in the matrix corresponds to a stream,and each column corresponds to a frame.Frames(columns)are arranged left-to-right in reverse-time order in the matrix.Thefirst step in Figure2is a set of cyclic rotations,called,which rotates each frame.These rotations are frame-wise in the sense that only data points contained in the same frame are rotated across the streams.Notice that in the radix-2case,half of the rotations leave the corresponding frame unchanged. The next step is a parallel-pipeline shuffle,which permutes the data in each stream.Notice that no data points need to be transferred between streams in this step.The last step is another set of frame-wise cyclic rotations,called,which leave the data in the same order that the perfect shuffle would.Note that and change the number of rotations per frame at different paces,one slow and one fast.These varying rates are difficult to see in the radix-2case,but are much more apparent in the higher-radix cases.If we apply the idea in Figure2)to each stage of the pipelined FFT in Figure1(b),replacing each perfect shuffle with three simpler shuffles,we get a pipelined FFT based on cyclic rotations,which is shown in Figure1(c).The kind of basic frame-wise rotations in Figure1(c)that is applied at slow-varying,and then fast-varying rates,is represented in general by the cyclic(circular)shift permutation matrix,made by permuting the rows of the identity matrix down by one row,and moving the bottom row up to the top.For≡Figure3:Interpretation of F C D Fexample,40001100001000010The key insight of the phase-rotation FFT is that the cyclic shift theorem for the DFT can be applied to the cyclic shift operators in Figure1(c).In matrix form,the cyclic shift theorem for a DFT is the relation1 where121is a set of twiddles,and the DFT matrix of size is11where2FFT with a parallel-pipeline shuffle,followed by a frame-wise cyclic rotation.The advantage of this new approach is that during the digit-reversing step at the end,all communication between streams is limited to data points within a single frame.For radix and points(1),the1-dimensional phase-rotation FFT is a matrix factorization of the-point DFT matrix.Starting with the Pease constant-geometry factorization,we replace its perfect shuffles by.Similarly,at the left end we replace the radix-index-digit-reversing permutation of data points by,where is another parallel-pipeline shuffle that will be defined formally in Section4.The phase-rotation FFT is then defined by:1vigorousalgebraicshuffling1(2)Let as before,and2.is a direct(tensor,Kronecker)productdiag.We interpret this as a kernel DFT operating on successive frames of points placed in the pipeline.For1:,the other parts of(2)are defined by112111111112:1(3) The direct sums are of the form1diag011and denotes the transpose of.See[10]for more on the basic definitions and relations used to derive (2),as well as the generalization to higher dimension FFT’s.Note that the stages in(2)are counted in reverse time order by the index.This is in keeping with the fact that(2)is a decimation-in-frequency(DIF)version of the FFT.The transpose of(2),with the product 1,is the decimation-in-time(DIT)version of the phase-rotation FFT.A shuffle and its inverse remain at the input and output ends of the pipeline,respectively.As we have seen,is a completely frame-wise rotation.It rotates(commutates)the data within each successive frame(column-vector)of the pipeline segment for a stage.There is also an implicit frame-wise broadcast within each FFT kernel engine,when an-point DFT is somehow computed.So in the phase-rotation FFT,data motion is all parallel,except for frame-wise motions at I/O and at every FFT kernel.The simplicity of the phase-rotation FFT is that no data point ever moves both down and across the pipeline in one time-step.4.Pipeline recipesWhile the structure of the pipelined phase-rotation FFT is extremely simple,experience has taught us that generating the appropriate twiddles and shuffle indices from the matrix formulations of(2)and(3)is difficult and confusing.To address this problem,we have developed a collection of recipes for generating the phase-rotation twiddles and shuffle indices off-line.The recipes are defined for any1D phase-rotation FFT of points.Following[8],they are written in a M ATLAB-like format.As we saw in(2),the pipelined phase-rotation FFT performs a typical“twiddle,shuffle,kernel”cycle at each stage.Only the twiddles vary from stage to stage,and there is a digit-reversing shuffle equivalent at the end.To implement this FFT using parallel pipeline segments(one per stage),we insert the -vector of input data into the pipeline as an array:thefirst points of go into thefirst frame (column),the second points go into the second frame,and so on.We must also have a shuffle address and a twiddle factor ready for each point in the pipeline.In other words,we would like tofill one copy of the pipeline segment with addresses,and another copy with twiddles.Then the processors in each stage of the pipeline will know what to do at each time-step0: 1. Using the current frame of addresses,they will fetch the current-frame of data0:10:1 and the current-frame of twiddles0:10:1(pointwise in parallel),multiply these two frames pointwise,then do an-point DFT of the twiddled data frame.That is how each stage is implemented in the parallel pipeline.The twiddle and shuffle recipes in this section are“in place”in the sense that they work inside the pipeline segments that will contain the desired addresses and twiddles.They are not“in place”in the usual sense,as we will freely use an input and an output copy of a pipeline segment.This approach avoids constructing and operating with large matrices(each containing only non-zero elements).Eachparallel-pipeline function recipe is given a name similar to that of the matrix factor in the FFT(2) that it effectively implements.4.1.Shuffle recipesAs a convention,pipeline addresses(pipeline array row and column indices)run0:1and0:1, respectively.To do parallel-pipeline shuffles,we only need the horizontal(column)addresses,since the data inside each pipe will only jump within that stream(row).The cross-stream shuffles,Cslow and Cfast,are implemented using,a cyclic rotation of a frame(a vertical slice of the parallel pipeline)that has the effect of.takes a column-vector01211012.function=Cslowfor1:for1:::1endendfunction=Cfastfor1:for1:::1endendThe inverses of Cslow and Cfast are formed by simply reversing.Next,we define some perfect shuffles.function=S!stride byfor0:1for10::2111:2:1endendfunction=S1!stride byfor0:1for10::211:1:21endendTo implement the parallel-pipeline shuffles,S,S 1,and Q,we will use the parallel-pipeline addresses,which are computed by the following function: function=Saddressesfor0:1::endfunction S1=SThe pipeline addresses for Q are obtained by block-perfect shuffles(along the length of the pipeline)of the addresses for S:function Q=Sfunction=Dslowtwiddles2for0:1for0:1:1211endendThe inverses of and are just their complex conjugates,and are generated simply by replacing by1.For stages1:(counted down from),we generate pipelined twiddles byfunction=T:0:!copy columns1endendendThe rest of the twiddle arrays can now be defined in terms of the shuffles:=S11=Cslow=Cslow1=S1=Cslow=S1111if1=1end=5.Implementation issuesIn this section we describe issues that arise when the phase-rotation FFT is implemented on a real parallel system.In particular,we describe implementation approaches for the radix-2FFT on the iWarp system. The main result is a scalable implementation of the pipelined phase-rotation FFT that runs at the full40 Mbytes/second rate of the iWarp physical links.5.1.iWarpThe iWarp is a private-memory multicomputer developed jointly by Intel and Carnegie Mellon[1,2].iWarp systems are2-dimensional tori of iWarp nodes,ranging in size from4to1024nodes.Each node consists of an iWarp component,up to16Mbytes of off-chip local memory,and a set of8unidirectional communication links that physically connect the node to four neighboring nodes.The iWarp component is a VLSI chip that contains a processing agent and a communication agent.The processing agent is a general-purpose load-store microprocessor,centered around a12832-bit register file,that runs at a maximum rate of20MFLOPs.The local memory is accessed at a rate of160Mbytes/sec. Each link runs at40Mbytes/sec,for a maximum aggregate bandwidth of320Mbytes/sec per node.The key feature of the iWarp is its communication system,which is summarized in Figure4.Each communication agent contains a set of20hardware FIFO queues.Each queue can hold up to832-bit words.iWarp nodes communicate with other nodes using unidirectional point-to-point structures calledFigure4:iWarp communication concepts.pathways.Each pathway is a sequence of queues.Pathways can be created and destroyed dynamically at runtime.Figure4shows a pair of such pathways.Data traveling along a pathway passes from queue to queue automatically,without disturbing the computations on intermediate nodes.For example,in Figure4,data items traveling over the pair of pathways do not disturb the computation on node1.The latency from queue to queue is small,ranging from100-300nanoseconds.Multiple pathways can share the same link.For example,in Figure4,two pathways share the link from node1to node2.In this case,the pathways share the link bandwidth in a round-robin fashion,one word at a time.If only one pathway is sending data over a link,then it gets the entire link bandwidth.If multiple pathways are sending data over a link,then the link can be utilized at the full40Mbytes/sec,and each pathway is guaranteed a proportional fraction of the bandwidth.User programs can directly access the queues,one word at a time,by reading and writing special registers in the registerfile called gates.To an iWarp instruction,a gate is just another register in the registerfile.The important point is that a program can read or write a word in a queue with the latency of a register access.A single instruction can read and write up to4words from queues,with a maximum aggregate bandwidth of160Mbytes/sec.Gates can be accessed directly from user-level C programs.5.2.Mapping strategies on iWarpThe problem is to develop a mapping of theflowgraph in Figure1(d)to an iWarp array.The simplest mapping strategy is to assign eachflowgraph node to a unique processor node of a linear array,route theflowgraph arcs through this array,and then embed the resulting linear array in the iWarp torus.This approach,called the PHASE5mapping because it uses5iWarp nodes for each FFT stage,is shown in Figure5(a).Each iWarp node in PHASE5executes a small node program that implements itsflowgraph operator. Each twiddle node()repeatedly reads a complex number from its input pathway(via the gates),multiplies it by the appropriate twiddle(precomputed off-line using the recipes in Section4.2),and sends the result to its output pathway(again,via the gates).Each shuffle operator()repeatedly reads a complex data item from its input pathway,stores it in memory,and uses the appropriate shuffle index(again precomputed off-line using the recipes in Section4.1)to send an appropriate double-buffered data point to the output(a)(b)Figure5:Strategies for mapping one stage of the FFT onto a linear array.(a)PHASE5mapping.(b)PHASE3mapping.pathway.The kernel node()repeatedly reads two complex numbers from its input pathways,performs the radix-2DFT kernel operation,and outputs two complex numbers to its output pathways.Another approach,the PHASE3mapping,combines the twiddle and shuffle operators on a single node, as shown in Figure5(b),so that each stage requires3nodes instead of5nodes.As we shall see,the communication and computation throughputs of the two mappings are identical.The advantage of the PHASE3mapping is that it is more node-efficient,requiring fewer nodes per stage than the PHASE5 mapping.The advantage of the PHASE5mapping is its simplicity.Each node is assigned exactly one operator from theflowgraph.Figure6shows a working implementation of a16K-point radix-2phase-rotation FFT on a64-node iWarp array at Carnegie Mellon.The large squares are iWarp nodes,labeled with the corresponding operator and stage number.The small squares are queues.The arrows are iWarp pathways.The implementation is based on the PHASE3mapping from Figure5(b).Each of the14FFT stages uses3nodes,with an additional3 nodes for the parallel-pipeline digit-reversing step at the end.5.3.PerformanceWhile the details are beyond the scope of this paper,each iteration of each node program in the PHASE3 and PHASE5mappings runs in at most8clocks.At the peak rate of40Mbytes/sec,each link can produce and consume a32-bitfloating-point number every2clocks.Further,each data point in the pipeline is a complex number consisting of a pair of32-bitfloating-point words.As a result,each pathway requires exactly half of the available link bandwidth.Since each link is shared by two pathways,and since the iWarp communication agent gives each pathway an equal share of the link bandwidth,without disturbing the computations on intermediate nodes,each link is fully utilized.The result is a radix-2FFT that runs at the full40Mbytes/sec rate of an iWarp link,regardless of the number of points in the FFT!Since each sample consists of8bytes,the FFT runs at a constant rate of5Msamples/sec Given a sufficient number of nodes,the iWarp phase-rotation FFT’s will produce arbitrarily large FFT’s at this rate.Perhaps even more important,the performance is the same on smaller FFT’s.Another way to characterize the performance of the PHASE3and PHASE5mappings is by its com-putational throughput,expressed as millions offloating-point operations per second(MFLOPS).However, there is a subtlety involved in using MFLOPS as a performance measure.The iWarp phase-rotation FFTD0D0F0D1D1F1D2D2D5F4D4D4F3D3D3F2D5F5D6D6F6D7D7F7D10D10F9D9D9F8D8D8F10D11D11F11D12D12F12D13sink D14D14F13D13Figure6:16K-point pipelined phase-rotation FFT running at40Mbytes/sec(350MFLOPS)on iWarpperforms16floating-point operations per iteration per stage(2adds and4multiplies by each twiddle opera-tor,and4adds by the kernel operator).But the standard formula for computing FFT MFLOPS is5log floating-point operations per N-point FFT[3],which implies10floating-point operations per iteration per stage.Therefore,in order to do fair comparisons with other FFT algorithms,we must compute the phase rotation performance using the standard of10floating-point operations per iteration per stage,even though the phase-rotation FFT is actually performing16floating-point operations per iteration per stage.Since each node program executes its computation in at most8clocks,and since each clock is50 nanoseconds,each stage of the iWarp phase-rotation FFT runs at a rate of1109nanoseconds10fp operations50nanosecondsvalidates a simple and realistic approach for building scalable pipelined FFT’s on a programmable parallel system.Further,the implementation demonstrates that,given a balanced parallel computer architecture with word-level access to the communication links,it is possible to build FFT’s that run at the full link bandwidth of the links,even when the FFT’s are relatively small.AcknowledgementsWe would like to thank Tom Warfel and LeeAnn Tzeng for their help with the iWarp implementation,and Doug Noll and Doug Smith for discussions that led to the more node-efficient mapping.References[1]B ORKAR,S.,C OHN,R.,C OX,G.,G LEASON,S.,G ROSS,T.,K UNG,H.T.,L AM,M.,M OORE,B.,P ETERSON,C.,P IEPER,J.,R ANKIN,L.,T SENG,P.S.,S UTTON,J.,U RBANSKI,J.,AND W EBB,J.iWarp:An integrated solution to high-speed parallel computing.In Supercomputing’88(Nov.1988),pp.330–339.[2]B ORKAR,S.,C OHN,R.,C OX,G.,G ROSS,T.,K UNG,H.T.,L AM,M.,L EVINE,M.,M OORE,B.,M OORE,W.,P ETERSON,C.,S USMAN,J.,S UTTON,J.,U RBANSKI,J.,AND W EBB,J.Supporting systolic and memory communication in iWarp.In Proceedings of the17th Annual International Symposium on Computer Architecture (Seattle,WA,May1990),pp.70–81.[3]C ARLSON,D.Ultra-performance FFTs for the CRAY-2and CRAY Y-MP supercomputers.Journal of Super-computing6(1992),107–115.[4]C OOLEY,J.,AND T UKEY,J.An algorithm for the machine computation of complex Fourier series.Mathematicsof Computation19(Apr.1965),297–301.[5]C ORINTHIOS,M.The design of a class of Fast Fourier Transform computers.IEEE Transactions on ComputersC-20(June1971),617–623.[6]M C C LELLAN,J.,AND P URDY,R.Radar signal processing.In Applications of Digital Signal Processing,A.Oppenheim,Ed.Prentice-Hall,Englewood Cliffs,NJ,1978.[7]P EASE,M.An adaptation of the Fast Fourier Transform for parallel processing.Journal of the Association forComputing Machinery15(1968),252–264.[8]V AN L OAN,putational Frameworks for the Fast Fourier Transform.SIAM,Philadelphia,PA,1992.[9]W HELCHEL,J.,O’M ALLEY,J.,R INARD,W.,AND M C A RTHUR,J.The systolic phase rotation FFT-a newalgorithm and parallel processor architecture.In Proceedings of ICASSP‘90(Apr.1990),pp.1021–1024. [10]W ITHERS,J R.,L.,AND W HELCHEL,J.The multidimensional phase-rotation FFT-a new parallel architecture.InProceedings of ICASSP‘91(May1991),pp.2889–2892.。