无线wifi模块-51单片机-C语言程序
利用SI4432无线收发模块和51单片机进行无线收发测试实验程序代码
利用SI4432无线收发模块和51单片机进行无线收发测试实验程序代码(1、发射模块代码)#include<reg52.h>#define uint unsigned int#define uchar unsigned charuchar jiewan; //无线接收端数据接收存储完毕的标志变量uchar wx_rx_cishu;//无线接收端接收数据的次数的标志变量sbit key=P1^6;/************************************************************************************////************************************************************************************/sbit SDO=P1^0; //数据输出端口sbit SDI=P1^1; //数据输入端口sbit SCLK=P1^2; //数据时钟线sbit NSEL=P1^3; //片选端口sbit IRQ=P1^4; //中断信号端口sbit SDN=P1^5; //内部电源开关端口unsigned char ITSTATUS;//存放接收到的无线数据的缓冲数组uchar xdata jieshou_huanchong[255];/************************************************************************************///延时函数/************************************************************************************/void delay_ms(uint t){uint x,y;for(x=0;x<t;x++)for(y=0;y<10;y++);}/************************************************************************************///延时函数/************************************************************************************/void delay_ms2(uint t){uint x,y;for(x=0;x<t;x++)for(y=0;y<10;y++);}/************************************************************************************/ //SPI初始化函数/************************************************************************************/ void spi_init(){NSEL=1;SCLK=0;}/************************************************************************************/ //单个字节的写入函数/************************************************************************************/ void spi_write_byte(uchar shuju){uchar i;for(i=0;i<8;i++){if(shuju&0x80) //先发送最高位{SDI=1;}else{SDI=0;}SCLK=1;shuju=shuju<<1;delay_ms(2);SCLK=0;}}/************************************************************************************/ //单个字节的读取函数/************************************************************************************/ uchar spi_read_byte(){uchar rxvalue,i;rxvalue=0x00;for(i=0;i<8;i++){rxvalue=rxvalue<<1;SCLK=1;SDO=1;if(SDO==1){rxvalue=rxvalue|0x01;}else{rxvalue=rxvalue&0xfe;}delay_ms(2); //经调试,这里必须要延时SCLK=0;delay_ms(2); //经调试,这里必须要延时}return rxvalue;}/************************************************************************************/ //往某个寄存器写入数据的函数/************************************************************************************/ void write4432_add_byte(uchar add,uchar shuju){NSEL=0;spi_write_byte(add|0x80);spi_write_byte(shuju);NSEL=1;}/************************************************************************************/ //从某个寄存器读取数据的函数/************************************************************************************/ uchar read4432_add_byte(uchar add){uchar value;NSEL=0;spi_write_byte(add|0x00);value=spi_read_byte();NSEL=1;return value;}/************************************************************************************/ //设置接收模式函数/************************************************************************************/ void set_rx_mode(){write4432_add_byte(0x0e,0x02); //设置接收使能write4432_add_byte(0x05,0xff); //使能接收包中断write4432_add_byte(0x06,0x00);read4432_add_byte(0x03); //清中断read4432_add_byte(0x04); //清中断write4432_add_byte(0x07,0x05); //人工接收模式,打开晶振}/************************************************************************************/ //4432数据包接收标志函数/************************************************************************************/ bit RX_shujubao(){IRQ=1;if(!IRQ){ITSTATUS=read4432_add_byte(0x03);//0x03寄存器中的值为0x02的话,表示已经接收一个有效数据包if((ITSTATUS&0x02)==0x02){return 1;}else{return 0;}}else{return 0;}}/************************************************************************************/ //4432发射单个数据的发送函数/************************************************************************************/ void TX_WX_DS(uchar jiqima ,uchar ztma){write4432_add_byte(0x0e,0x01); //发射使能write4432_add_byte(0x3e,3); //设置发送数据包长度//要发射出去的数据write4432_add_byte(0x7f,0xfa);//识别码write4432_add_byte(0x7f,jiqima);//机器码write4432_add_byte(0x7f,ztma);//状态码write4432_add_byte(0x05,0x04); //使能包发送中断write4432_add_byte(0x06,0x00);read4432_add_byte(0x03); //清中断read4432_add_byte(0x04); //清中断write4432_add_byte(0x07,0x09); //人工发射模式,打开晶振while(1) //等待发送完成,产生中断。
C51单片机利用ESP8266配置WIFI,发送温度数据的源码

C51单片机利用ESP8266配置WIFI,发送温度数据的源码使用DS18B20,ESP8266,实现WIFI传输温度,底层部分代码。
其中WIFI是作为服务器,上位机作为客户端。
单片机源程序如下:/***********************程序名:wifi_3.c功能:单片机与手机通信,实现温度信息的传输编程人: baxlumen************************/#include "reg52.h"#include#define uint unsigned int#define uchar unsigned char#define ulong unsigned longtypedef unsigned int u16;typedef unsigned char u8;sbit DSPORT=P3^7;sbit moto=P1^1;sbit CLK = P3^6; //时钟sbit DIN = P3^4; //输入sbit CS = P3^5; //片选#define LCD1602_DATAPINS P0sbit LCD1602_E=P2^7;sbit LCD1602_RW=P2^5;sbit LCD1602_RS=P2^6;u16 sun; //光照int temp;int sdata; //温度int xiaoshu1;int xiaoshu2;float tp;uchar DisplayData[]={0,0,0,0,0,0,0,0};/*****************定义程序中所需要的延时********************/void Delay1ms(uint y){uint x;for( ; y>0; y--){for(x=110; x>0; x--);}}void delay(u16 i){while(i--);}void delay1ms(){unsigned char i;for(i=124;i>0;i--); //延时124*8+10=1002us}/************************************************************** ****************** 函数名 : Lcd1602_Delay1ms* 函数功能 : 延时函数,延时1ms* 输入 : c* 输出 : 无* 说名 : 该函数是在12MHZ晶振下,12分频单片机的延时。
基于51单片机驱动SI4432无线模块收发C语言程序

基于51单片机驱动SI4432无线模块收发C语言程序#include <reg52.h>#include <ABSACC.h>#include <intrins.h>#include <stdio.h>//----------------------------------RF4432配置口定义--------------------------------------- //sbit RF4432_PAC=P2^4; //收发模式切换控制端sbit RF4432_SDO=P3^5; //SPI数据输出sbit RF4432_SDI=P3^4; //SPI数据输入sbit RF4432_SCLK=P3^7; //SPI时钟输入端口sbit RF4432_SEL=P3^3; //SPI片选sbit RF4432_IRQ=P3^2; //SI4432工作状态指示端口sbit KEY=P3^6; //BLT53A上电控制端sbit LED_GREEN=P2^1;sbit P15=P1^5;//-------------------------射频芯片相关定义--------------------------------------------#define RF4432_TxRxBuf_Len 32 //定义RF4432数据包长度char RF4432_TxRxBuf[RF4432_TxRxBuf_Len];unsigned char Packet[30]={9,20,30,21,15,58,56,69,25,23,12,25,56,22,23,24};//Transmit packet unsigned char Length=4;unsigned char Data_Buf[10];unsigned char Data_Len;typedef enum _RF_ENUM{RF_OK = 0x00, //function response parametersRF_ERROR_TIMING = 0x01,RF_ERROR_PARAMETER = 0x02,RF_PACKET_RECEIVED = 0x03,RF_NO_PACKET = 0x04,RF_CRC_ERROR = 0x05,} RF_ENUM;//----------------------------RF4432 配置寄存器地址-------------------------------- #define DEVICE_TYPE 0x00#define EVICE_VERSION 0x01 //版本号#define DEVICE_STATUS 0x02 //设备状态#define INTERRUPT_STATUS_1 0x03#define INTERRUPT_STATUS_2 0x04#define INTERRUPT_ENABLE_1 0x05#define INTERRUPT_ENABLE_2 0x06#define OPERATING_FUNCTION_CONTROL_1 0x07 //工作模式和功能控制1#define OPERATING_FUNCTION_CONTROL_2 0x08 //工作模式和功能控制2#define CRYSTAL_OSCILLATOR_LOAD_CAPACITANCE 0x09 //晶振负载电容设置#define MICROCONTROLLER_OUTPUT_CLOCK 0x0A#define GPIO0_CONFIGURATION 0x0B //GPIO0功能设置寄存器见英文文档第105页#define GPIO1_CONFIGURATION 0x0C#define GPIO2_CONFIGURATION 0x0D#define IO_PORT_CONFIGURATION 0x0E#define ADC_CONFIGURATION 0x0F#define ADC_SENSOR_AMPLIFIER_OFFSET 0x10#define ADC_VALUE 0x11#define TEMPERATURE_SENSOR_CONTROL 0x12 //温度传感器校准#define TEMPERATURE_VALUE_OFFSET 0x13#define WAKE_UP_TIMER_PERIOD_1 0x14#define WAKE_UP_TIMER_PERIOD_2 0x15#define WAKE_UP_TIMER_PERIOD_3 0x16#define WAKE_UP_TIMER_VALUE_1 0x17#define WAKE_UP_TIMER_VALUE_2 0x18#define LOW_DUTY_CYCLE_MODE_DURATION 0x19#define LOW_BATTERY_DETECTOR_THRESHOLD 0x1A //低压检测阈值寄存器#define BATTERY_VOLTAGE_LEVEL 0x1B#define IF_FILTER_BANDWIDTH 0x1C //中频滤波器带宽寄存器#define AFC_LOOP_GEARSHIFT_OVERRIDE 0x1D#define AFC_TIMING_CONTROL 0x1E#define CLOCK_RECOVERY_GEARSHIFT_OVERRIDE 0x1F#define CLOCK_RECOVERY_OVERSAMPLING_RATIO 0x20#define CLOCK_RECOVERY_OFFSET_2 0x21#define CLOCK_RECOVERY_OFFSET_1 0x22#define CLOCK_RECOVERY_OFFSET_0 0x23#define CLOCK_RECOVERY_TIMING_LOOP_GAIN_1 0x24#define CLOCK_RECOVERY_TIMING_LOOP_GAIN_0 0x25#define RECEIVED_SIGNAL_STRENGTH_INDICATOR 0x26#define RSSI_THRESHOLD_FOR_CLEAR_CHANNEL_INDICATOR 0x27#define ANTENNA_DIVERSITY_REGISTER_1 0x28#define ANTENNA_DIVERSITY_REGISTER_2 0x29#define DATA_ACCESS_CONTROL 0x30#define EZMAC_STATUS 0x31#define HEADER_CONTROL_1 0x32 //Header 起始码设置#define HEADER_CONTROL_2 0x33#define PREAMBLE_LENGTH 0x34 //前导码长度#define PREAMBLE_DETECTION_CONTROL 0x35 //前导码检测设置#define SYNC_WORD_3 0x36 //同步字节#define SYNC_WORD_2 0x37#define SYNC_WORD_1 0x38#define SYNC_WORD_0 0x39#define TRANSMIT_HEADER_3 0x3A#define TRANSMIT_HEADER_2 0x3B#define TRANSMIT_HEADER_1 0x3C#define TRANSMIT_HEADER_0 0x3D#define TRANSMIT_PACKET_LENGTH 0x3E //发送数据包长度,详细请看P125页#define CHECK_HEADER_3 0x3F#define CHECK_HEADER_2 0x40#define CHECK_HEADER_1 0x41#define CHECK_HEADER_0 0x42#define HEADER_ENABLE_3 0x43#define HEADER_ENABLE_2 0x44#define HEADER_ENABLE_1 0x45#define HEADER_ENABLE_0 0x46#define RECEIVED_HEADER_3 0x47#define RECEIVED_HEADER_2 0x48#define RECEIVED_HEADER_1 0x49#define RECEIVED_HEADER_0 0x4A#define RECEIVED_PACKET_LENGTH 0x4B //接收数据包长度,详细请看P134页#define ANALOG_TEST_BUS 0x50#define DIGITAL_TEST_BUS_ENSCTEST_ 0x51#define TX_RAMP_CONTROL 0x52#define PLL_TUNE_TIME 0x53 //锁相环切换时间#define CALIBRATION_CONTROL 0x55#define MODEM_TEST 0x56#define CHARGEPUMP_TEST 0x57#define CHARGEPUMP_CURRENT_TRIMMING_OVERRIDE 0x58#define DIVIDER_CURRENT_TRIMMING 0x59#define VCO_CURRENT_TRIMMING 0x5A#define VCO_CALIBRATION_OVERRIDE 0x5B#define SYNTHESIZER_TEST 0x5C#define BLOCK_ENABLE_OVERRIDE_1 0x5D#define BLOCK_ENABLE_OVERRIDE_2 0x5E#define BLOCK_ENABLE_OVERRIDE_3 0x5F#define CHANNEL_FILTER_COEFFICIENT_ADDRESS 0x60#define CHANNEL_FILTER_COEFFICIENT_VALUE 0x61#define CRYSTAL_OSCILLATOR_CONTROL_TEST 0x62#define RC_OSCILLATOR_COARSE_CALIBRATION_OVERRIDE 0x63#define RC_OSCILLATOR_FINE_CALIBRATION_OVERRIDE 0x64#define LDO_CONTROL_OVERRIDE_ENSPOR 0x65#define LDO_LEVEL_SETTING 0x66 #define DELTASIGMA_ADC_TUNING_1 0x67#define DELTASIGMA_ADC_TUNING_2 0x68#define AGC_OVERRIDE_1 0x69 #define AGC_OVERRIDE_2 0x6A#define GFSK_FIR_FILTER_COEFFICIENT_ADDRESS 0x6B#define GFSK_FIR_FILTER_COEFFICIENT_VALUE 0x6C#define TX_POWER 0x6D //发射功率设置,详细请见P153#define TX_DATA_RATE_1 0x6E //数据发送波特率设置寄存器1#define TX_DATA_RATE_0 0x6F //数据发送波特率设置寄存器0#define MODULATION_MODE_CONTROL_1 0x70 //调制方式控制,详细请见P155#define MODULATION_MODE_CONTROL_2 0x71#define FREQUENCY_DEVIATION 0x72#define FREQUENCY_OFFSET_1 0x73#define FREQUENCY_OFFSET_2 0x74#define FREQUENCY_BAND_SELECT 0x75 //频段选择,详细请见P157#define NOMINAL_CARRIER_FREQUENCY_1 0x76 //基准载波频率#define NOMINAL_CARRIER_FREQUENCY_0 0x77#define FREQUENCY_HOPPING_CHANNEL_SELECT 0x79 //跳频频道选择,详细请见P158#define FREQUENCY_HOPPING_STEP_SIZE 0x7A //跳频频道间隔#define TX_FIFO_CONTROL_1 0x7C#define TX_FIFO_CONTROL_2 0x7D#define RX_FIFO_CONTROL 0x7E#define FIFO_ACCESS 0x7F //FIFO读写方式设置,//-------------------------------RF4432控制指令--------------------------------------------- #define RR 0x00#define WR 0x80//------------------------------------------------延时------------------------------void delay_10us(char n){int i;while(n--)for(i=0;i<5;i++);}void delay_ms(int num){int x,y;for(y=0;y<num;y++){for(x = 0;x < 500;x)x++;}}//------------------------------------SPI单字节读取函数------------------------------------- unsigned char SPI_Read(void){unsigned char i,rxdata;rxdata = 0x00;for (i = 0;i < 8;i++){rxdata = rxdata<<1;RF4432_SCLK=1;RF4432_SDO=1;if (RF4432_SDO==1) //读取最高位,保存至最末尾,通过左移位完成整个字节 {rxdata |= 0x01;}else{rxdata &= ~0x01;}delay_10us(2);RF4432_SCLK=0;delay_10us(2);}return rxdata;}//--------------------------SPI单字节写入函数----------------------------------------------void SPI_Write(unsigned char txdata){unsigned char i;for (i = 0;i < 8;i++){if (txdata&0x80) //总是发送最高位{RF4432_SDI=1;}else{RF4432_SDI=0;}RF4432_SCLK=1;txdata = txdata<<1;RF4432_SCLK=0;}}//---------------------RF4432寄存器读取函数--------------------------------------------------- void RF4432_ReadReg(unsigned char addr, unsigned char *RegisterData){RF4432_SEL=0;SPI_Write(addr|RR);*RegisterData = SPI_Read();RF4432_SEL=1;}//----------------RF4432寄存器写入函数---------------------------------------------------------- void RF4432_WriteReg(unsigned char addr, unsigned char value){RF4432_SEL=0;SPI_Write(addr|WR);SPI_Write(value);RF4432_SEL=1;}//-----------------------RF4432寄存器读取函数---------------------------------------------void RF4432_ReadBurestReg(unsigned char addr,unsigned char *p,unsigned char count){unsigned char i;RF4432_SEL=0;SPI_Write(addr|RR);for(i=0;i<count;i++){p[i] = SPI_Read();}RF4432_SEL=1;}//---------------------------------RF4432射频芯片初始化函数------------------------------------ void RF4432_Init(void){unsigned char RegisterData;//unsigned int i,j;delay_ms(20);delay_ms(20);delay_ms(20);delay_ms(20);delay_ms(20);delay_ms(20);RF4432_ReadReg(0x03,&RegisterData);//read the Interrupt Status1 registerRF4432_ReadReg(0x04,&RegisterData);//read the Interrupt Status2 register//SW resetRF4432_WriteReg(0x07, 0x80);//write 0x80 to the Operating & Function Control1 register//wait for chip ready interrupt from the radio (while the nIRQ pin is high)while(RF4432_IRQ);//read interrupt status registers to clear the interrupt flags and release NIRQ pinRF4432_ReadReg(0x03, &RegisterData);RF4432_ReadReg(0x04, &RegisterData);/*set the physical parameters*///set the center frequency to 434 MHzRF4432_WriteReg(0x75, 0x57); //write 0x75 to the Frequency Band Select registerRF4432_WriteReg(0x76, 0x19); //write 0xBB to the Nominal Carrier Frequency1 registerRF4432_WriteReg(0x77, 0x00); //write 0x80 to the Nominal Carrier Frequency0 register//set the desired TX data rate (9.6kbps)RF4432_WriteReg(0x6E, 0x13); //write 0x4E to the TXDataRate 1 registerRF4432_WriteReg(0x6F, 0xA9); //write 0xA5 to the TXDataRate 0 registerRF4432_WriteReg(0x70, 0x2C); //write 0x2C to the Modulation Mode Control 1 registerRF4432_WriteReg(0x58, 0x80); //VCO//set the TX power to MAXRF4432_WriteReg(0x6D, 0x1F); //write 0x1F to the TX Power register/*set the modem parameters according to the exel calculator(parameters: 4.8 kbps, deviation: 50 kHz, channel filter BW: 102.2 kHz*/RF4432_WriteReg(0x1C, 0xAD);//write 0x1E to the IF Filter Bandwidth registerRF4432_WriteReg(0x20, 0xE2);//write 0xD0 to the Clock Recovery Oversampling Ratio registerRF4432_WriteReg(0x21, 0x80);//write 0x00 to the Clock Recovery Offset 2 registerRF4432_WriteReg(0x22, 0x1A);//write 0x9D to the Clock Recovery Offset 1 registerRF4432_WriteReg(0x23, 0x37);//write 0x49 to the Clock Recovery Offset 0 registerRF4432_WriteReg(0x24, 0x00);//write 0x00 to the Clock Recovery Timing Loop Gain 1 registerRF4432_WriteReg(0x25, 0x04);//write 0x24 to the Clock Recovery Timing Loop Gain 0 registerRF4432_WriteReg(0x1D, 0x44);//enable afcRF4432_WriteReg(0x1E, 0x0A);RF4432_WriteReg(0x2A, 0x2C);RF4432_WriteReg(0x1F, 0x03);RF4432_WriteReg(0x69, 0x60);//write 0x40 to the AFC Loop Gearshift Override registerRF4432_WriteReg(0x72, 0x70);//write 0x48 to the Frequency Deviation register//set the preamble length to 10bytes if the antenna diversity is used and set to 5bytes if notRF4432_WriteReg(0x34, 0xCF); //write 0x0C to the Preamble Length register//set preamble detection threshold to 20bitsRF4432_WriteReg(0x35, 0x20); //write 0x2A to the Preamble Detection Control register//Disable header bytes; set variable packet length (the length of the payload is defined by the //received packet length field of the packet); set the synch word to two bytes longRF4432_WriteReg(0x33, 0x02); //write 0x02 to the Header Control2 register//Set the sync word pattern to 0x2DD4RF4432_WriteReg(0x36, 0x2D); //write 0x2D to the Sync Word 3 registerRF4432_WriteReg(0x37, 0xD4); //write 0xD4 to the Sync Word 2 register//enable the TX & RX packet handler and CRC-16 (IBM) checkRF4432_WriteReg(0x30, 0x8D); //write 0x8D to the Data Access Control register//Disable the receive header filtersRF4432_WriteReg(0x32, 0x00 ); //write 0x00 to the Header Control1 register//enable FIFO mode and GFSK modulationRF4432_WriteReg(0x71, 0x2B); //write 0x63 to the Modulation Mode Control 2 register/*set the GPIO's according the testcard type*/RF4432_WriteReg(0x0B, 0x0A); //write 0x12 to the GPIO0 Configuration(set the TX state)RF4432_WriteReg(0x0C, 0x0A); //write 0x15 to the GPIO1 Configuration(set the RX state)//set the AGCRF4432_WriteReg(0x69, 0x35); //write 0x0B to the AGC Override 2 register//set ADC reference voltage to 0.9VRF4432_WriteReg(0x68, 0x07); //write 0x04 to the Deltasigma ADC Tuning 2 register//set Crystal Oscillator Load Capacitance registerRF4432_WriteReg(0x09, 0x7F); //write 0xD7 to the Crystal Oscillator Load Capacitance registerRF4432_WriteReg(0x73,0x00);RF4432_WriteReg(0x74,0x00);//TxFIFOReset();RF4432_WriteReg(0x08, 0x01);RF4432_WriteReg(0x08, 0x00);//RxFIFOReset();RF4432_WriteReg(0x08, 0x02);RF4432_WriteReg(0x08, 0x00);}//-------------------------RF4432设置接收模式函数------------------------------------------ void RF4432_SetRxMode(void){unsigned char RegisterData;RF4432_WriteReg(0x0E, 0x02);//Rx_EN;//enable the packet valid interruptRF4432_WriteReg(0x05, 0xFF);RF4432_WriteReg(0x06, 0x00);RF4432_ReadReg(0x03, &RegisterData);RF4432_ReadReg(0x04, &RegisterData);//enable receiver chainRF4432_WriteReg(0x07, 0x05);}//---------------------------RF4432数据包接收函数------------------------------------------- unsigned char RF4432_RxPacket(void){unsigned char temp;RF4432_IRQ=1;if(!RF4432_IRQ){RF4432_ReadReg(INTERRUPT_STATUS_1,&temp);if(temp&0x02){return 1;}}return 0;}void RFIdle(void){unsigned char RegisterData;RF4432_WriteReg(0x07, 0x01);//diasble all ITsRF4432_WriteReg(0x05, 0x00);RF4432_WriteReg(0x06, 0x00);RF4432_ReadReg(0x03, &RegisterData);RF4432_ReadReg(0x04, &RegisterData);}void RFTransmit(unsigned char * packet, unsigned char length){unsigned char temp;unsigned char RegisterData;RF4432_WriteReg(0x0E, 0x01);//Tx_EN;RF4432_WriteReg(0x3e, length);for(temp=0;temp<length;temp++){RF4432_WriteReg(0x7f,packet[temp]);} //enable the wanted ITsRF4432_WriteReg(0x05, 0x04);RF4432_WriteReg(0x06, 0x00);RF4432_ReadReg(0x03, &RegisterData);RF4432_ReadReg(0x04, &RegisterData);//enable transmitterRF4432_WriteReg(0x07, 0x09);while(RF4432_IRQ);//while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_12)); RF4432_ReadReg(0x03, &RegisterData);RF4432_ReadReg(0x04, &RegisterData);}RF_ENUM RFPacketReceived(unsigned char * packet, unsigned char * length) {unsigned char i;unsigned char RegisterData;if( RF4432_IRQ == 0 ){RF4432_ReadReg(0x03,&RegisterData);if( (RegisterData & 0x01) == 0x01 )//CRC error{RF4432_SetRxMode();return RF_CRC_ERROR;}if( (RegisterData & 0x02) == 0x02 )//packet received{//read bufferRF4432_ReadReg(0x4b,length);for(i=0;i<*length;i++){RF4432_ReadReg(0x7f,packet++);}RF4432_SetRxMode();return RF_PACKET_RECEIVED;}}return RF_NO_PACKET;}void StartUART( void ){SCON = 0x50;TMOD = 0x20;TH1 = 0XF4;TL1 = 0XF4;TR1 = 1; //允许定时器1工作}//串口发送数void R_S_Byte(unsigned char R_Byte){SBUF = R_Byte;while( TI == 0 ); //查询法 TI = 0;}main(){//unsigned char i;KEY=1;LED_GREEN=0;StartUART();RF4432_Init();delay_ms(10);RF4432_SetRxMode();//RF4432设置接收模式函数P15=1;while(1){RF4432_WriteReg(0x0E, 0x02);//Rx_EN;LED_GREEN=1;//灯亮RFTransmit(Packet,Length);//发送数据RFIdle();//进入空闲模式delay_ms(10);RF4432_SetRxMode();//RF4432设置接收模式函数while(RFPacketReceived(Data_Buf,&Data_Len) != RF_PACKET_RECEIVED);//waiting for receivingRFIdle();RF4432_ReadReg(0x26,&Data_Buf[1]);LED_GREEN=0;delay_ms(200);delay_ms(200);/*RF4432_SetRxMode();LED_GREEN=0;//=========================================================================================================== =if(RF4432_RxPacket()) //判断是否接收到数据{LED_GREEN=1;RF4432_ReadBurestReg(FIFO_ACCESS,RF4432_TxRxBuf,RF4432_TxRxBuf_Len);for(i=0;i<32;i++){R_S_Byte(RF4432_TxRxBuf[i]);}RF4432_SetRxMode();}*/ }}。
c语言wifi原理

c语言wifi原理C语言WiFi原理一、引言随着无线网络技术的普及和发展,WiFi已经成为人们生活中不可或缺的一部分。
而C语言作为一种高效、灵活的编程语言,也可以用于实现WiFi功能。
本文将介绍C语言下的WiFi原理及其实现方法。
二、WiFi原理概述WiFi(Wireless Fidelity)是一种无线网络技术,它使用无线电波进行数据传输。
WiFi使用的是IEEE 802.11协议,该协议定义了无线网络的物理层和数据链路层。
在WiFi通信中,无线路由器充当基站,负责发射和接收无线信号。
而设备(如电脑、手机等)通过无线网卡接收无线信号,并将其转换为可识别的数据。
C语言可以通过操作无线网卡的驱动程序来实现WiFi功能。
三、C语言下的WiFi实现方法1. 打开网卡在C语言中,可以通过调用操作系统提供的API函数来打开网卡。
打开网卡后,可以进行后续的WiFi功能设置和数据传输操作。
2. 扫描WiFi网络通过调用相关API函数,可以扫描可用的WiFi网络。
扫描结果将包含网络的SSID(网络名称)、信号强度等信息。
3. 连接WiFi网络选择要连接的WiFi网络后,可以通过调用API函数来连接该网络。
连接时需要提供WiFi网络的SSID和密码等信息。
连接成功后,设备将与WiFi网络建立起通信。
4. 数据传输连接成功后,可以使用C语言进行数据传输。
通过调用API函数,可以发送和接收数据,实现与其他设备的通信。
四、C语言下的WiFi编程示例下面是一个简单的C语言程序示例,用于实现WiFi连接并发送数据的功能:```#include <stdio.h>#include <stdlib.h>#include <string.h>// 打开网卡void openWifiCard() {// 调用操作系统的API函数打开网卡// ...printf("网卡已打开\n");}// 扫描WiFi网络void scanWifiNetwork() {// 调用操作系统的API函数扫描WiFi网络// ...printf("扫描到以下WiFi网络:\n");printf("1. WiFi1\n");printf("2. WiFi2\n");printf("3. WiFi3\n");}// 连接WiFi网络void connectWifiNetwork(char* ssid, char* password) { // 调用操作系统的API函数连接指定的WiFi网络// ...printf("成功连接到WiFi网络:%s\n", ssid);}// 发送数据void sendData(char* data) {// 调用操作系统的API函数发送数据// ...printf("已发送数据:%s\n", data);}int main() {openWifiCard();scanWifiNetwork();connectWifiNetwork("WiFi1", "password");sendData("Hello, WiFi!");return 0;}```以上示例代码演示了如何使用C语言实现WiFi连接和数据传输。
51单片机无线课程设计
51单片机无线课程设计一、课程目标知识目标:1. 学生能够理解51单片机的基本原理,掌握无线通信技术的基本概念;2. 学生能够掌握51单片机编程的基础知识,包括指令系统、寄存器配置等;3. 学生能够了解无线模块的工作原理,并掌握相关调试方法;4. 学生能够运用51单片机及无线模块实现简单的数据传输和控制功能。
技能目标:1. 学生能够独立完成51单片机的编程与调试;2. 学生能够独立搭建无线通信系统,实现数据收发;3. 学生能够运用所学的知识解决实际问题,具备一定的课程设计能力;4. 学生能够通过课程实践,提升动手能力、团队协作能力和创新能力。
情感态度价值观目标:1. 学生能够认识到单片机及无线通信技术在日常生活中的应用,激发学习兴趣;2. 学生能够通过课程学习,培养严谨的科学态度和良好的学习习惯;3. 学生能够树立团队协作意识,学会与他人分享成果,培养合作精神;4. 学生能够关注单片机及无线通信领域的发展动态,培养持续学习的意识。
课程性质:本课程为实践性较强的课程设计,旨在让学生在掌握51单片机及无线通信技术基础知识的基础上,通过实际操作,提高解决实际问题的能力。
学生特点:学生具备一定的单片机基础和编程能力,对无线通信技术有一定了解,但实践能力有待提高。
教学要求:结合学生特点,注重理论与实践相结合,强调动手实践,培养学生独立思考和解决问题的能力。
将课程目标分解为具体的学习成果,便于后续教学设计和评估。
二、教学内容1. 51单片机原理及编程基础:- 单片机结构及工作原理- 51单片机指令系统与寄存器- C语言编程基础与Keil开发环境使用2. 无线通信技术原理与模块:- 无线通信基本原理- 常用无线模块介绍(如NRF24L01)- 无线模块的配置与调试方法3. 51单片机与无线模块的接口技术:- 单片机与无线模块的硬件连接- 单片机与无线模块的软件编程- 数据发送与接收处理4. 课程设计实践:- 简单无线数据传输系统设计- 实现无线控制功能(如远程开关、温度监测等)- 课程设计报告撰写与展示教学内容安排与进度:第一周:51单片机原理及编程基础第二周:无线通信技术原理与模块第三周:51单片机与无线模块的接口技术第四周:课程设计实践与成果展示教材章节:《单片机原理与应用》第三章:51单片机结构与工作原理;第四章:51单片机指令系统与编程;第七章:无线通信技术及其应用。
基于单片机控制的WIFI无线传输模块设计

基于单片机控制的WIFI无线传输模块设计随着物联网和智能家居的发展,无线传输模块的需求越来越大,尤其是具备WIFI功能的无线传输模块。
本文将介绍一种基于单片机控制的WIFI无线传输模块的设计。
首先,我们需要选择一个适合的单片机作为控制核心。
常见的选择有Arduino、Raspberry Pi等。
这里我们选择Arduino作为控制核心,因为它具备易上手、低功耗等特点。
接下来,我们需要选择一个适合的WIFI模块。
常见的选择有ESP8266、ESP32等。
这里我们选择ESP8266作为WIFI模块,因为它具备低功耗、价格便宜等特点。
在硬件设计方面,我们需要将单片机与WIFI模块进行连接。
首先,将单片机的RX引脚连接到WIFI模块的TX引脚,将单片机的TX引脚连接到WIFI模块的RX引脚。
接下来,将单片机的VCC引脚连接到WIFI模块的VCC引脚,将单片机的GND引脚连接到WIFI模块的GND引脚。
在软件设计方面,我们需要编写程序将单片机与WIFI模块进行通信。
首先,我们需要初始化单片机和WIFI模块的串口通信参数,如波特率、数据位、停止位等。
然后,我们可以使用单片机的串口发送AT指令给WIFI模块,实现无线传输功能。
常用的AT指令有连接WIFI网络、断开WIFI网络、发送数据等。
由于字数限制的原因,无法详细展开所有的设计细节。
但是希望通过以上的描述,能够给读者提供一个初步的了解和思路,方便进一步深入学习和实践。
总之,基于单片机控制的WIFI无线传输模块的设计是一个相对较复杂的工程,需要综合考虑硬件设计和软件编程等多方面因素。
然而,一旦成功设计和实现,它将具备广泛的应用前景,可以用于物联网、智能家居、智能农业等领域,为人们的生活带来更多的便利和舒适。
51单片机c语言教程
51单片机c语言教程在本教程中,我们将学习如何在51单片机上使用C语言进行编程。
无论您是初学者还是有一定经验的开发者,本教程都将对您有所帮助。
首先,我们需要了解一些基本概念。
51单片机是一种基于哈弗微电子公司的MCS-51架构的微控制器。
它采用了Harvard结构,即将程序存储器和数据存储器分开。
它具有各种功能和接口,可以满足不同的应用需求。
在使用C语言进行51单片机编程之前,必须安装相应的开发工具。
这里我们推荐使用Keil C51开发环境。
安装完成后,我们就可以开始编写第一个程序了。
#include <reg51.h>void main(){// 在这里编写您的代码}以上是一个简单的C语言程序模板。
我们使用了reg51.h头文件,该文件包含了与51单片机相关的寄存器定义和常量。
接下来,我们可以开始编写具体的功能代码了。
例如,如果我们想要在LED灯上闪烁一个简单的模式,可以使用以下代码:#include <reg51.h>sbit LED = P1^0;void main(){while(1){LED = 0; // 点亮LEDdelay(1000); // 延时1秒LED = 1; // 熄灭LEDdelay(1000); // 延时1秒}}在这个程序中,我们首先定义了一个LED的控制引脚,然后通过循环实现了闪烁的功能。
在每次循环中,我们先点亮LED,然后通过调用延时函数延时1秒,再将LED熄灭,再次延时1秒。
这样就形成了一个简单的LED闪烁效果。
除了控制IO口外,51单片机还可以实现其他各种功能,如定时器、串口通信等。
这些功能的实现也都可以通过C语言来完成。
希望通过本教程,您可以对51单片机的C语言编程有一个基本的了解。
在以后的学习中,您可以深入研究这些知识,并通过实践来提升自己的能力。
祝您学习愉快!。
51单片机汇编语言及C语言经典实例
51单片机汇编语言及C语言经典实例汇编语言是一种用来编写计算机指令的低级语言,它与机器语言十分接近,可以直接控制计算机硬件。
而C语言是一种高级程序设计语言,它具有结构化编程和模块化设计的特点。
本文将介绍51单片机汇编语言和C语言的经典实例,并进行详细解析。
一、LED指示灯的闪烁我们首先来看一个经典的51单片机汇编语言的实例——LED指示灯的闪烁。
我们可以通过控制单片机的IO口来实现LED的闪烁效果。
以下是汇编语言的代码:```assemblyORG 0 ; 程序起始地址MOV P1, #0; 将 P1 置为0,熄灭LEDLJMP $ ; 无限循环```以上代码使用了51单片机的MOV指令和LJMP指令。
MOV指令用来将一个立即数(这里是0)存储到寄存器P1中,控制对应的I/O口输出低电平,从而熄灭LED。
而LJMP指令则是无条件跳转指令,将程序跳转到当前地址处,实现了无限循环的效果。
对应的C语言代码如下:```c#include <reg51.h>void main() {P1 = 0; // 将 P1 置为0,熄灭LEDwhile(1); // 无限循环}```以上代码使用了reg51.h头文件,该头文件提供了对51单片机内部寄存器和外设的访问。
通过将P1赋值为0,控制IO口输出低电平,实现了熄灭LED的效果。
while(1)是一个无限循环,使得程序一直停留在这个循环中。
二、数码管的动态显示接下来我们介绍51单片机汇编语言和C语言实现数码管动态显示的经典实例。
数码管动态显示是通过控制多个IO口的高低电平来控制数码管显示不同的数字。
以下是汇编语言的代码:```assemblyORG 0 ; 程序起始地址MOV A, #0FH ; 设置数码管全亮,A存储数码管控制位MOV P2, A ; 将 A 的值存储到 P2,控制数码管的数码控制位DELAY: ; 延时循环MOV R7, #0FFH ; 设置延时计数值LOOP1: ; 内层循环MOV R6, #0FFH ; 设置延时计数值LOOP2: ; 内部延时循环DJNZ R6, LOOP2 ; 延时计数减1并判断是否为0,不为0则继续循环DJNZ R7, LOOP1 ; 延时计数减1并判断是否为0,不为0则继续循环DJNZ A, DELAY ; A减1并判断是否为0,不为0则继续循环JMP DELAY ; 无限循环,实现动态显示```以上代码中,我们通过MOV指令来将一个立即数(0x0F)存储到寄存器A中,控制数码管显示0-9的数字。
开发指南---51单片机+RTL8019上网编程指南
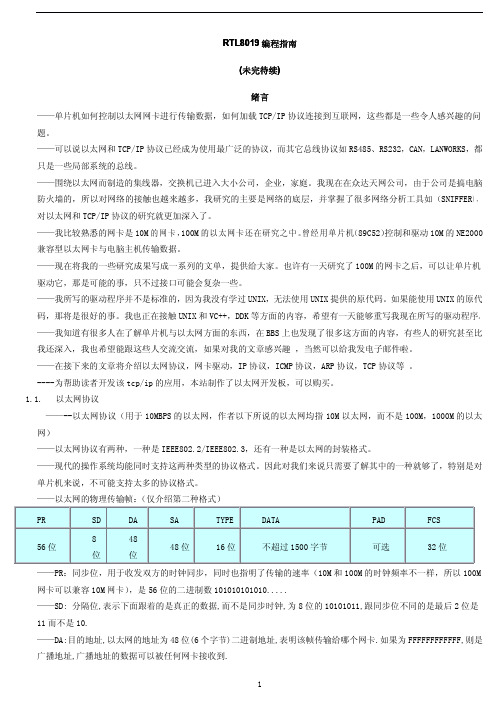
复位的过程将执行一些操作,比如将 93c46 读入,将内部寄存器初始化等。这些至少需要 2 毫秒的时间。我们推 荐大家等待更久的时间之后才对网卡操作,比如 100 毫秒之后才对它操作,以确保完全复位。
对 RSTDRV 可以接单片机的一个引脚进行对网卡的复位。但也可以直接将 RSTDRV 跟单片机的 RESET 引脚并联,单 片机复位的时候,网卡也复位,以减少一个单片机的引脚的使用。这种情况下,为了保证能够完全复位,可以使用下 面介绍的热复位代码。 1.5. 跟复位有关的寄存器:
00H--0FH 共 16 个地址是寄存器地址。 寄存器分成 4 页 PAGE0--PAGE3,但 NE2000 兼容的寄存器只有 3 页(Page0-Page2),(第四页是 RTL8019AS 自己定 义的,我们不用去管这些寄存器,因为你对第四页的寄存器的操作仅对这个网卡是有效的,如果你换成其他 Ne2000 兼容的网卡,例如 DM9008,DP8390 等,你的程序将无法正常运行。 为了保证驱动程序对所有 Ne2000 的网卡有效,不 要去操作第四页的寄存器) 由于寄存器较多,我将在用到该寄存器的时候才对该寄存器介绍。 1.8. 对网卡进行复位: 这是网卡驱动程序的需要做的第一个内容,由于我们将网卡设置为跳线模式,而不是即插即用的模式, RTL8019AS.PDF 中介绍的 PLUG and PLAY 的一些过程,我们不需要做,因为单片机的资源有限,能够减少的操作,都 尽量减少。 程序从 main()开始执行: #include <my.h> /*my.h 为作者所用的头文件,包含所有 89c52 寄存器的大写和小写的定义, 和一些常用的子函数,一些宏的定义*/
(完整版)基于51单片机的无线数据收发系统设计(带电路图和代码)

1 引言伴随着短距离、低功率无线数据传输技术的成熟,无线数据传输被越来越多地应用到新的领域。
与有线通信方式相比,无线通信以其不需铺设明线,使用便捷等一系列优点,在现代通信领域占重要地位。
但以往的无线产品存在范围和方向上的局限。
例如,一些无线产品在使用时,无法将信息反馈给控制者;还有一些无线产品不能很好地显示参数或状态信息,如果能在系统中增加一块小型液晶显示电路,产品不仅能向用户显示其状态或状态的改变,而且可以大大降低成本。
正如人们所发现的,只要建立双向无线通信-双工通信并且选择成本低的收发芯片,就会出现许多新应用。
本次设计主要是利用无线收发电路,加上单片机控制与液晶显示制成一套完整的数据收发系统。
考虑到目前市场上的一些需求,设计的主要要求是方案成本低,体积小,低功耗,集成度高,尽量无需调外部元件,传输时间短,接口简单。
nRF401是国外最新推出的单片无线收发一体芯片,它在一个20脚的芯片中包括了高频发射、高频接收、PLL合成、FSK调制、多频道切换等功能,并且外围元件少,便于设计生产,功耗极低,集成度高,是目前集成度较高的无线数传产品,它为低速率低成本的无线技术提出了解决方案。
2 无线数据收发系统2.1 系统组成无线数据传输系统有点对点,点对多点和多点对多点三种。
本系统由于实际应用的需要,接收器和数据终端之间的数据传输通过nRF401进行,构成点对点无线数据传输系统。
整个系统中,两数据终端之间的无线通信采用433MHz的频段作为载波频率,收发通过串口通信。
无线数据收发系统可以分为无线收发控制电路、单片机控制电路、显示电路和按键电路四部分组成,系统原理如图2-1所示:图2-1 无线数据收发系统原理图2.2 实现过程当我们需要发送数据时,使用按键来输入所需发送的信息。
按键与单片机AT89S52的P3.2-P3.5口相接,单片机的 P1.0口控制信息的发送与接收,并且TXD 端与收发器输入端相连,通过TXD将数据传入收发器,收发器接收到数据后,通过FSK调制,将信号发送出去;接收端的收发器通过解调,将载波信号转换为数字信号,完成信息传输过程;收发器的输出端通过RXD端将数字信号输入到单片机;单片机将数据传送到显示器,这样就完成了一次数据发送与接收并显示的过程。
51单片机及C语言入门教程
51单片机及C语言入门教程一、了解51单片机1.硬件介绍2.体系结构3.编程语言二、掌握C语言基础C语言是一种结构化的高级编程语言,易于学习和应用。
以下是C语言的基础知识。
1.数据类型C语言支持多种数据类型,包括整型、浮点型、字符型等。
根据需要选择合适的数据类型进行变量的声明和使用。
2.运算符C语言提供了丰富的运算符,包括算术运算符、关系运算符、逻辑运算符等。
熟悉并正确使用这些运算符是进行编程的关键。
3.控制语句控制语句是C语言中用于控制程序流程的重要语法结构。
常见的控制语句有条件语句(if-else)、循环语句(for、while、do-while)等。
4.函数函数是C语言中的基本代码单位,可以实现代码的模块化和复用。
编写函数时,需要明确函数的返回类型、参数列表和函数体。
三、开发环境搭建在进行51单片机和C语言的开发之前,需要准备好相应的开发工具和环境。
1.集成开发环境(IDE)2.单片机编程器3.相关资料在学习和开发过程中,需要查阅相关的资料和教程。
可以通过互联网相关的电子书籍、论坛和博客等。
四、编写第一个程序在搭建好开发环境之后,可以编写并运行第一个C语言程序。
1.创建工程使用IDE创建一个新的工程,并选择适合的目标单片机型号。
2.编写代码在IDE中,创建一个新的C语言源文件,并编写代码。
例如,可以编写一个led闪烁的程序。
```#include<reg51.h>void mainP1=0x00;//设置P1口为输出while(1)P1 = 0xff; // P1口所有引脚输出高电平P1=0x00;//P1口所有引脚输出低电平}```五、进阶知识学习通过掌握51单片机基本知识和C语言基础,可以进行更复杂的开发和项目实践。
1.中断处理中断是一种异步的事件处理机制,在51单片机中具有重要的意义。
学习如何使用中断来处理各种外部事件和信号。
2.存储器扩展3.通信接口总结:本文介绍了51单片机和C语言的入门教程。
51单片机C语言编程100例单片机c语言编程
51单片机C语言编程100例单片机c语言编程单片机是一种常用于嵌入式系统的微型计算机,可以根据预设的程序来执行指令。
而C语言是一种高级编程语言,具有较强的可读性和可移植性。
在单片机编程中,C语言是常用的编程语言之一。
本文将介绍51单片机C语言编程中的100个实例,帮助读者了解单片机编程的基本概念和技巧。
1. LED灯闪烁这是一个简单的实例,用于让LED灯交替闪烁。
在C语言中,可以使用宏定义和循环语句来实现:```c#include <reg52.h>#define LED P1void delay(unsigned int t) //延时函数{unsigned int i, j;for (i = t; i > 0; i--)for (j = 110; j > 0; j--);}void main(){while (1) //循环执行{LED = 0xFF; //LED灯亮delay(1000); //延时1秒LED = 0x00; //LED灯灭delay(1000); //延时1秒}}```2. 数码管显示这个实例演示了如何使用数码管进行数字显示。
在C语言中,可以通过控制IO口状态来实现:```c#include <reg52.h>#define LED P0unsigned char code digit[] ={ //数码管显示值表0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90}; void delay(unsigned int t) //延时函数{unsigned int i, j;for (i = t; i > 0; i--)for (j = 110; j > 0; j--);}void main(){unsigned int i;while (1) //循环执行{for(i=0;i<10;i++){LED = digit[i]; //显示数字delay(1000); //延时1秒}}```3. 蜂鸣器发声这个实例展示了如何使用蜂鸣器进行声音发声。
基于WIFI模块和单片机的无线数据传输(附代码)
目录第一章阶段任务第二章基于WIFI模块的无线数据传输的原理1.1 时钟模块1.2 最小单片机系统的原理1.3 温度传感器DS18B201.4 串口1.5 WIFI模块第三章基于WIFI模块的无线数据传输的实现2.1 WIFI模块设置2.2 串口部分设置2.3 调试与运行过程第四章程序与框图第五章小结第二章基于WIFI模块的无线数据传输的原理1.1时钟DS1302模块:电路原理图:DS1302与单片机的连接也仅需要3条线:CE引脚、SCLK串行时钟引脚、I/O 串行数据引脚,Vcc2为备用电源,外接32.768kHz晶振,为芯片提供计时脉冲。
读写时序说明:DS1302是SPI总线驱动方式。
它不仅要向寄存器写入控制字,还需要读取相应寄存器的数据。
控制字总是从最低位开始输出。
在控制字指令输入后的下一个SCLK时钟的上升沿时,数据被写入DS1302,数据输入从最低位(0位)开始。
同样,在紧跟8位的控制字指令后的下一个SCLK脉冲的下降沿,读出DS1302的数据,读出的数据也是从最低位到最高位。
数据读写时序如图1.2单片机最小系统的原理:说明复位电路:由电容串联电阻构成,由图并结合"电容电压不能突变"的性质,可以知道,当系统一上电,RST脚将会出现高电平,并且,这个高电平持续的时间由电路的RC值来决定.典型的51单片机当RST脚的高电平持续两个机器周期以上就将复位,所以,适当组合RC的取值就可以保证可靠的复位.晶振电路:典型的晶振取11.0592MHz(因为可以准确地得到9600波特率和19200波特率,用于有串口通讯的场合)/12MHz(产生精确的uS级时歇,方便定时操作)单片机:一片AT89S51/52或其他51系列兼容单片机特别注意:对于31脚(EA/Vpp),当接高电平时,单片机在复位后从内部ROM的0000H开始执行;当接低电平时,复位后直接从外部ROM的0000H开始执行.1.3温度传感器DS18B20的原理(连接到单片机最小系统,并将温度发送给WIFI模块):3.1.1 DS18B20性能特点(1) 独特的单线接口方式,只需一个接口引脚即可通信;(2) 每一个DS18B20都有一个唯一的64位ROM 序列码; (3) 在使用中不需要任何外围元件;(4) 可用数据线供电,电压范围:+3.0V-+5.5 V ;(5) 测温范围:-55℃ -+125℃,在-10℃-+85℃范围内精度为+0.5℃,分辨率为0.0625℃; (6) 通过编程可实现9-12位的数字读数方式。
基于单片机控制的WIFI无线传输模块设计
基于单片机控制的WIFI无线传输模块设计WIFI无线传输模块是一种可以实现无线通信的装置,通过无线网络与其他设备进行数据传输。
在基于单片机控制的设计方案中,我们可以利用单片机来实现对WIFI模块的控制和数据处理。
首先,我们需要选择合适的WIFI模块。
常见的WIFI模块有ESP8266、ESP32等,这些模块都具备较强的无线通信能力和低功耗特性。
我们可以根据项目需求选择合适的模块。
接下来,我们需要将WIFI模块与单片机进行连接。
一般情况下,WIFI模块通过串口与单片机进行通信。
我们可以通过将单片机的TX引脚连接到WIFI模块的RX引脚,并将单片机的RX引脚连接到WIFI模块的TX引脚,实现双向通信。
在单片机程序的设计中,我们需要编写相应的驱动程序来控制WIFI模块。
首先,我们需要初始化WIFI模块的串口通信设置,如波特率、数据位、停止位等。
然后,我们可以通过向WIFI模块发送特定的AT指令来进行控制和配置。
例如,可以通过AT指令连接到WIFI网络、获取本地IP地址、发送数据等。
在驱动程序中,我们还可以定义一些函数来简化AT指令的发送和接收,使控制更加方便。
另外,在设计中我们需要注意WIFI模块的电源供应。
一般情况下,WIFI模块需要3.3V的电压供应,而单片机输出的IO信号一般为5V。
因此,我们需要使用逻辑电平转换器将单片机的IO信号转换为3.3V,以兼容WIFI模块的工作电压。
在实际应用中,我们可以根据项目需求设计不同的功能。
例如,我们可以设计一个远程控制系统,通过WIFI无线传输模块将用户的控制指令发送到被控制的设备上。
我们可以通过配置WIFI模块为TCP服务器,在单片机程序中监听特定的端口,接收来自用户的控制指令,并执行相应的操作。
总结起来,基于单片机控制的WIFI无线传输模块设计涉及到WIFI模块的选择、与单片机的连接、驱动程序编写、逻辑电平转换等方面。
通过合理的设计和编程,可以实现WIFI模块与单片机的无线通信和数据传输。
51单片机c语言教程pdf
51单片机c语言教程pdf51单片机是一种广泛应用于嵌入式系统开发的微控制器芯片。
它的高性能和低功耗使得它成为许多电子产品的首选。
而在51单片机的开发中,C语言是最常用的编程语言之一。
下面将介绍一本51单片机C语言教程PDF。
这本教程的名字叫做《51单片机C语言教程》,是一本非常实用的教材,适合初学者和有一定基础的读者。
教程内容详细介绍了51单片机的基本知识和C语言编程技巧,旨在帮助读者快速入门和掌握单片机编程技术。
首先,教程从51单片机的硬件结构和工作原理开始介绍,包括片内存储器、中断系统、时钟和定时器等重要组成部分。
通过深入理解这些基本概念,读者可以更好地理解和运用单片机进行编程。
接下来,教程详细讲解了C语言在51单片机开发中的应用。
它从C语言的数据类型、变量、数组和函数等基本知识讲起,逐步引导读者掌握C语言的编程技巧。
同时,教程还介绍了常用的C语言库函数,如延时函数、IO口操作函数和串口通信函数等,帮助读者更方便地使用和控制单片机。
此外,教程还提供了大量的实例程序和实践项目,以帮助读者巩固所学的知识。
这些实例程序覆盖了单片机的各个应用领域,如LED灯控制、数码管显示、电机控制等,既能够帮助读者理解和熟悉单片机的编程方式,又能够带领读者实践解决实际问题。
对于初学者来说,这本教程还有一个很大的优点,它使用了简洁清晰的语言,图文并茂地讲解了每个知识点,使得读者更容易理解和掌握。
而且,教程还提供了丰富的习题和答案,以帮助读者巩固所学的知识,并检验自己的学习成果。
总而言之,这本《51单片机C语言教程》是一本非常实用的教材,它详细介绍了51单片机的基本知识和C语言编程技巧,并提供了丰富的实例和习题。
通过学习这本教程,读者可以迅速入门并掌握单片机编程技术,为嵌入式系统开发打下坚实的基础。
51单片机c语言模块化编程的步骤和方法
51单片机c语言模块化编程的步骤和方法
模块化编程是一种编程方法,它将程序划分为独立的、可重用的模块,每个模块执行特定的功能。
对于51单片机来说,C语言是常用的编程语言。
下
面是一般的步骤和方法,以实现C语言的模块化编程:
1. 明确需求和功能模块:首先,你需要明确你的程序需要完成哪些功能。
将这些功能划分为独立的模块,每个模块执行一个特定的任务。
2. 创建模块:为每个功能模块创建一个C文件。
例如,如果你有一个控制LED的模块,你可以创建一个名为``的文件。
3. 编写模块函数:在每个模块的C文件中,编写实现该模块功能的函数。
这些函数应该是模块的一部分,并且应该是模块化的。
4. 编写头文件:为每个模块创建一个头文件。
头文件应该包含该模块的函数声明和任何公共变量。
例如,``可能包含控制LED的函数的声明。
5. 主程序调用模块函数:在主程序中,你需要包含适当的头文件,并调用需要的模块函数。
主程序应该将所有模块组合在一起,以实现所需的功能。
6. 编译和链接:使用适当的编译器将所有C文件编译为目标文件。
然后,
使用链接器将这些目标文件链接在一起,生成最终的可执行文件。
7. 测试和调试:在目标硬件上测试和调试程序。
确保每个模块都按预期工作,并且所有模块都能协同工作。
这只是一个基本的步骤和方法。
具体的实现可能会根据硬件、需求和其他因素有所不同。
不过,基本的模块化编程原则应该是相同的。
基于51单片机的WIFI无线控制系统设计与实现

基于51单片机的WIFI无线控制系统设计与实现发表时间:2018-10-08T15:36:52.577Z 来源:《新材料.新装饰》2018年5月下作者:赵金永[导读] 随着移动技术的不断发展,整个世界在走向移动化。
现阶段,通信技术正面临一场深刻的变革,传统的有线网络已不能满足日益增长的通信需要。
无线通信技术越来越受到关注,人们需要一种不受约束的通信技术,能够随时随地的获取信息。
随着互联网越来越深入的走进人们的生活,用户对能够随时随地上网的需求越来越迫切,WIFI 无线通信技术也得到了迅速发展。
本文研究了51单片机的WIFI无线控制系统。
(广州沣雷交通科技股份有限公司,广州市 510000)摘要:随着移动技术的不断发展,整个世界在走向移动化。
现阶段,通信技术正面临一场深刻的变革,传统的有线网络已不能满足日益增长的通信需要。
无线通信技术越来越受到关注,人们需要一种不受约束的通信技术,能够随时随地的获取信息。
随着互联网越来越深入的走进人们的生活,用户对能够随时随地上网的需求越来越迫切,WIFI 无线通信技术也得到了迅速发展。
本文研究了51单片机的WIFI无线控制系统。
WiFi(Wireless Fidelity)是无线局域网(WLAN)技术——IEEE 802.11系列标准的商用名称。
IEEE 802.11系列标准主要包括IEEE802.11a/b/g/n 5种。
WIFI是由AP ( Access Point)和无线网卡组成的无线网络。
AP一般称为网络桥接器或接入点, 它是当作传统的有线局域网络与无线局域网络之间的桥梁, 因此任何一台装有无线网卡的PC均可透过AP去分享有线局域网络甚至广域网络的资源。
WIFI主要技术优点是无线接入、高速传输以及传输距离远其中, 802.11n 可以将WLAN的传输速率由目前802.11a及802.11g提供的54Mbps,提高到300Mbps甚至高达600Mbps。
在开放性区域通讯距离可达305m,在封闭性区域通讯距离76 ~ 122m,方便与现有的有线以太网整合,组网的成本更低。
无线wifi模块-51单片机-C语言程序

{
ESP8266_Set("AT+CIPSEND=0,4");
while(*puf!='\0') //遇到空格跳出循环
{
Send_Uart(*puf); //向WIFI模块发送控制指令。
us_delay(5);
********************************************************************/
#include <reg52.h>//包含头文件
#define uint unsigned int
#define uchar unsigned char
#define载入值
puf++;
}
us_delay(5);
Send_Uart('\n'); //换行
ms_delay(10);
}
/********************************************************************
名称:主函数
作用:程序的执行入口
********************************************************************/
二、关于安卓手机方面
测试时可以使用,网络调试助手(下载这个app安装在手机即可)发送数字1表示小灯亮,0表示灯灭。后续想深入的话可以自己开发安卓app软件。
三、参数设置
由于参数的设置方法和步奏网上资料很全,这里提供相关的网址自行参考。
Uart-W
无线模块NRF24L01基于C51单片机-双向通讯C语言程序(中文详解)

#include <reg52.h>#include <intrins.h>/******************************************************************************** *******//* NRF24L01 的管脚定义,以及在本程序中的应用,VCC接3.3V电源,可以通过5V用电压转换芯片/*得到,NC 管脚可以接可以不接,暂时没用途。
本程序应用于51或者52单片机,是两个模块进行通讯/*成功的简单指示,现象是:模块1的 KEY1 对应模块1的LED1 和模块2的LED3 ,模块1的 KEY2 对应模/*块1的LED2 和模块2的LED4,发过来也对应。
/******************************************************************************** *******/typedef unsigned char uchar;typedef unsigned char uint;/************************************NRF24L01端口定义***********************************/sbit NC =P2^0; //没用,不接也可sbit MISO =P2^5; //数字输出(从 SPI 数据输出脚)sbit MOSI =P2^4; //数字输入(从 SPI 数据输入脚)sbit SCK =P1^7; //数字输入(SPI 时钟)sbit CE =P2^1; //数字输入(RX 或 TX 模式选择)sbit CSN =P2^2; //数字输入(SPI片选信号)sbit IRQ =P2^6; //数字输入(可屏蔽中断)/************************************按键***********************************************/sbit KEY1=P3^3;//按键S1sbit KEY2=P3^2;//按键S2/************************************数码管位选******************************************/sbit led1=P1^0; //LED0sbit led2=P1^1; //LED1sbit led3 =P1^2; //LED2sbit led4 =P1^3; //LED3sbit led5 =P1^4; //LED4/*********************************************NRF24L01*************************** ********/#define TX_ADR_WIDTH 5 // 5 uints TX address width 发送地址宽度#define RX_ADR_WIDTH 5 // 5 uints RX address width 接收地址宽度#define TX_PLOAD_WIDTH 20 // 20 uints TX payload 有效载荷装载货物#define RX_PLOAD_WIDTH 20 // 20 uints TX payloaduint const TX_ADDRESS[TX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //本地地址uint const RX_ADDRESS[RX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //接收地址/***************************************NRF24L01寄存器指令*******************************/#define READ_REG 0x00 // 读寄存器指令#define WRITE_REG 0x20 // 写寄存器指令#define RD_RX_PLOAD 0x61 // 读取接收数据指令#define WR_TX_PLOAD 0xA0 // 写待发数据指令#define FLUSH_TX 0xE1 // 冲洗发送 FIFO指令#define FLUSH_RX 0xE2 // 冲洗接收 FIFO指令#define REUSE_TX_PL 0xE3 // 定义重复装载数据指令#define NOP 0xFF // 保留/*************************************SPI(nRF24L01)寄存器地址***********************/#define CONFIG 0x00 // 配置收发状态,CRC校验模式以及收发状态响应方式#define EN_AA 0x01 // 自动应答功能设置#define EN_RXADDR 0x02 // 可用信道设置#define SETUP_AW 0x03 // 收发地址宽度设置#define SETUP_RETR 0x04 // 自动重发功能设置#define RF_CH 0x05 // 工作频率设置#define RF_SETUP 0x06 // 发射速率、功耗功能设置#define STATUS 0x07 // 状态寄存器#define OBSERVE_TX 0x08 // 发送监测功能#define CD 0x09 // 地址检测#define RX_ADDR_P0 0x0A // 频道0接收数据地址#define RX_ADDR_P1 0x0B // 频道1接收数据地址#define RX_ADDR_P2 0x0C // 频道2接收数据地址#define RX_ADDR_P3 0x0D // 频道3接收数据地址#define RX_ADDR_P4 0x0E // 频道4接收数据地址#define RX_ADDR_P5 0x0F // 频道5接收数据地址#define TX_ADDR 0x10 // 发送地址寄存器#define RX_PW_P0 0x11 // 接收频道0接收数据长度#define RX_PW_P1 0x12 // 接收频道0接收数据长度#define RX_PW_P2 0x13 // 接收频道0接收数据长度#define RX_PW_P3 0x14 // 接收频道0接收数据长度#define RX_PW_P4 0x15 // 接收频道0接收数据长度#define RX_PW_P5 0x16 // 接收频道0接收数据长度#define FIFO_STATUS 0x17 // FIFO栈入栈出状态寄存器设置/*************************************函数声明****************************************/void Delay(unsigned int s); //大延时void inerDelay_us(unsigned char n); //小延时void init_NRF24L01(void); //NRF24L01 初始化uint SPI_RW(uint dat); //根据SPI协议,写一字节数据到nRF24L01,同时从nRF24L01读出一字节uchar SPI_Read(uchar reg); //从reg寄存器读一字节void SetRX_Mode(void); //数据接收配置uint SPI_RW_Reg(uchar reg, uchar value); //写数据value到reg寄存器uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars); //从reg寄存器读出bytes 个字节,通常用来读取接收通道数据或接收/发送地址uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars); //把pBuf缓存中的数据写入到nRF24L01,通常用来写入发射通道数据或接收/发送地址unsigned char nRF24L01_RxPacket(unsigned char* rx_buf); //数据读取后放入rx_buf接收缓冲区中void nRF24L01_TxPacket(unsigned char * tx_buf); //发送 tx_buf中数据/*****************************************长延时*****************************************/void Delay(unsigned int s){unsigned int i;for(i=0; i<s; i++);for(i=0; i<s; i++);}/******************************************************************************** **********/uint bdata sta; //状态标志sbit RX_DR =sta^6; //RX_DR 为 sta 的第六位sbit TX_DS =sta^5; //TX_DS 为 sta 的第五位sbit MAX_RT =sta^4; //MAX_RT 为 sta 的第四位/******************************************************************************** **********//*延时函数/******************************************************************************** **********/void inerDelay_us(unsigned char n) //延时,us 级{for(;n>0;n--)_nop_();}/******************************************************************************** ********//*NRF24L01初始化/******************************************************************************** *******/void init_NRF24L01(void){inerDelay_us(100);CE=0; // 芯片使能CSN=1; // 禁止 SPISCK=0; // SPI时钟置低SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 写本地地址SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, RX_ADDRESS, RX_ADR_WIDTH); // 写接收端地址SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 频道0自动ACK应答允许SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 允许接收地址只有频道0,如果需要多频道可以参考Page21SPI_RW_Reg(WRITE_REG + RF_CH, 0); // 设置信道工作为2.4GHZ,收发必须一致SPI_RW_Reg(WRITE_REG + RX_PW_P0, RX_PLOAD_WIDTH); //设置接收数据长度,本次设置为32字节SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); //设置发射速率为1MHZ,发射功率为最大值0dB}/******************************************************************************** ********************//*函数:uint SPI_RW(uint uchar)/*功能:NRF24L01的SPI写时序-----根据SPI协议,写一字节数据到nRF24L01,同时从nRF24L01 读出一字节/******************************************************************************** ********************/uint SPI_RW(uint dat){uint i;for(i=0;i<8;i++) // 循环8次{MOSI = (dat & 0x80); // dat的最高位输出到MOSI MSB to MOSIdat = (dat << 1); // 从右向左进一位shift next bit into MSB..SCK = 1; // 拉高SCK,nRF24L01从MOSI读入1位数据,同时从MISO输出1位数据Set SCK high..dat |= MISO; //读MISO到 dat 最低位 capture current MISO bitSCK = 0; // SCK置低..then set SCK low again}return(dat); //返回读出的一字节 return read dat}/******************************************************************************** ********************/*函数:uchar SPI_Read(uchar reg)/*功能:NRF24L01的SPI时序-----------从reg寄存器读一字节/******************************************************************************** ********************/uchar SPI_Read(uchar reg){uchar reg_val;CSN = 0; //CSN置低,开始传输数据CSN low, initialize SPI communication...SPI_RW(reg); //选择寄存器 Select register to read from..reg_val = SPI_RW(0); //然后从该寄存器读数据 ..then read registervalueCSN = 1; //CSN拉高,结束数据传输CSN high, terminate SPI communicationreturn(reg_val); //返回寄存器数据 return register value}/******************************************************************************** ********************//*功能:NRF24L01读写寄存器函数/*描述:写数据value到reg寄存器/******************************************************************************** ********************/uint SPI_RW_Reg(uchar reg, uchar value){uchar status;CSN = 0; // CSN置低,开始传输数据CSN low, init SPI transactionstatus = SPI_RW(reg); // 选择寄存器,同时返回状态字 select registerSPI_RW(value); // 然后写数据到该寄存器 ..and write value to it..CSN = 1; // CSN拉高,结束数据传输CSN high againreturn(status); // 返回状态寄存器 returnnRF24L01 status uchar}/******************************************************************************** ********************//*函数:uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)/*功能: 用于读数据,reg:为寄存器地址,pBuf:为待读出数据地址,uchars:读出数据的个数/*描述: 从reg寄存器读出bytes个字节,通常用来读取接收通道数据或接收/发送地址/******************************************************************************** ********************/uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars){uint status,i;CSN = 0; //CSN置低,开始传输数据 Set CSN low, init SPI tranactionstatus = SPI_RW(reg); //选择寄存器,同时返回状态字 Select register to write to and read status ucharfor(i=0;i<uchars;i++)pBuf[i] = SPI_RW(0); //逐个字节从nRF24L01读出CSN = 1; //CSN拉高,结束数据传输return(status); //返回状态寄存器return nRF24L01 status uchar}/******************************************************************************** *************************/*函数:uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)/*功能: 用于写数据:为寄存器地址,pBuf:为待写入数据地址,uchars:写入数据的个数/*描述:把pBuf缓存中的数据写入到nRF24L01,通常用来写入发射通道数据或接收/发送地址/******************************************************************************** *************************/uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars){uint status,i;CSN = 0; //CSN置低,开始传输数据status = SPI_RW(reg); //选择寄存器,同时返回状态字inerDelay_us(10);for(i=0; i<uchars; i++)SPI_RW(*pBuf++); //逐个字节写入nRF24L01CSN = 1; //CSN拉高,结束数据传输return(status); //返回状态寄存器}/******************************************************************************** ********************//*函数:void SetRX_Mode(void)/*功能:数据接收配置/******************************************************************************** ********************/void SetRX_Mode(void){CE=0;SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f);//CRC使能,16位CRC校验,上电,接收模式CE = 1; // 拉高CE启动接收设备inerDelay_us(130);}/******************************************************************************** **********************//*函数:unsigned char nRF24L01_RxPacket(unsigned char* rx_buf)/*功能:数据读取后放入rx_buf接收缓冲区中/******************************************************************************** **********************/unsigned char nRF24L01_RxPacket(unsigned char* rx_buf){unsigned char revale=0;sta=SPI_Read(STATUS); // 读取状态寄存其来判断数据接收状况if(RX_DR) // 判断是否接收到数据{CE = 0; //SPI使能SPI_Read_Buf(RD_RX_PLOAD,rx_buf,TX_PLOAD_WIDTH);// read receive payload from RX_FIFO bufferrevale =1; //读取数据完成标志}SPI_RW_Reg(WRITE_REG+STATUS,sta); //接收到数据后RX_DR,TX_DS,MAX_PT都置高为1,通过写1来清楚中断标志return revale;}/******************************************************************************** ***************************/*函数:void nRF24L01_TxPacket(unsigned char * tx_buf)/*功能:发送 tx_buf中数据/******************************************************************************** **************************/void nRF24L01_TxPacket(unsigned char * tx_buf){CE=0; //StandBy I模式SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 装载接收端地址SPI_Write_Buf(WR_TX_PLOAD, tx_buf, TX_PLOAD_WIDTH); // 装载数据SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // IRQ收发完成中断响应,16位CRC,主发送CE=1; //置高CE,激发数据发送inerDelay_us(10);}/************************************主函数************************************************************/void main(void){unsigned char tf =0;unsigned char TxBuf[20]={0}; // 要发送的数组unsigned char RxBuf[20]={0}; // 接收的数据数组init_NRF24L01() ; //模块初始化led1=1;led2=1;led3 =1;led4 =1; //led 灯关闭Delay(1000);while(1){if(KEY1 ==0 ) //按键 1 按下{TxBuf[1] = 1 ; //赋值tf = 1 ;led1=0; //本地led 灯闪烁Delay(200);led1=1;Delay(200);}if(KEY2 ==0 ) //按键 2 按下{TxBuf[2] =1 ; //赋值tf = 1 ;led2=0; //本地led 灯闪烁Delay(200);led2=1;Delay(200);}if (tf==1) //有键按下{nRF24L01_TxPacket(TxBuf); //发送数据 Transmit Tx buffer dataTxBuf[1] = 0x00; //清零TxBuf[2] = 0x00;tf=0;Delay(1000);}SetRX_Mode(); //设置成接受模式RxBuf[1] = 0x00; //接收的数组相应位清零RxBuf[2] = 0x00;Delay(1000);nRF24L01_RxPacket(RxBuf); //接收数据if(RxBuf[1]|RxBuf[2]){if( RxBuf[1]==1){led3=RxBuf[0];}if( RxBuf[2]==1){led4=RxBuf[4];}Delay(3000); //old is '1000'}RxBuf[1] = 0x00; //清零RxBuf[2] = 0x00;led3=1; //关灯led4=1;}}本程序存在的问题:反应不够灵敏,当在按键1和按键2之间切换的时候,对方的灯闪烁会有一定的延时,另外本程序没有消除按键的抖动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
void us_delay(uchar t)
{
while(t--);
}
/********************************************************************
名称:波特率发生器函数
作用:波特率发生器可以是T1定时器实现,也可以是MCU内部独立的波特率发生器,
TL1=TH1;
EA=1;//总中断打开
ES=0;//关闭串口中断
TR1=1;//启动定时器1
}
/*
void Uart_Init()//使用独立的波特率发生器(STC12C560S2或带有独立波特率发生器//、//的单片机均可)
{
SCON=0x50;//设置为串行口以方式1工作,8位异步通讯,允许接收中断。
AUXR1=0x80;//切换到P1口
ES=1;//开启串口中断
EA=1;//开启总中断
}
*/
/********************************************************************
名称:串口发送函数
功能:MCU向其他与其连接的设备发送数据(此处是无线WIFI模块ESP8266)
//define RELOAD_COUNT (256-(((11520000/16)/12)/9600))也可以或波特率9600 //256-晶振频率/波特率x16=BRT
/*****************LED灯对应P0口的1个端口*************/
sbit LED0=P3^2;
/************波特率发生器相关功能寄存器的定义****************/
********************************************************************/
#include <reg52.h>//包含头文件
#define uint unsigned int
#define uchar unsigned char
#define RELOAD_COUNT 0xFA//宏定义波特率发生器的载入值
********************************************************************/
void Send_Uart(uchar value)
{
ES=0;//关闭串口中断
TI=0;//清发送完毕中断请求标志位
SBUF=value;//发送
while(TI==0);//等待发送完毕
各自不同的载入值计算式,具体根据寄存器相关设置来参考计算,以实现
**************************************************************/
void Uart_Init()//使用定时器1作为波特率发生器(STC89C52、STC89C51、AT89C51或者STC12C560S2等均可)
无线WIFI模块ESP8266和51单片机 实现LED灯的无线控制
一、关于51单片机和无线WIFI模块的接线方面
RXD、TXD、GND和51单片机的TXD、RXD、GND接好,模块其他引脚均为高电平,电源VCC是3.3V左右(两节1.5v干电池),本人由于没有稳压模块,偷懒了当时使用5V的直流源,测试结果目前没有问题(不过不建议啊!)
sfr AUXR=0x8E;
sfr BRT=0x9C;
sfr AUXR1=0xA2;
/*****************相关变量**************/
uchar Receive,i;
uint n;
uchar Recive_table[15];//用于接收wifi模块反馈到MCU上的数据
/*******************************************************************
题目:基于STC12C560S2单片机无线WIFI模块控制
内容:通过MCU上位机对ESP8266wifi模块的控制和设置,实现手机端控制LED灯
的亮灭。
注意:该型号单片机是普通89C51单片执行速度的12倍,内含RAM1280字节,ROM为60K,PCA计数器,PWM发生模块,ADC转换模块等,晶振一定是11.0592MHz。
二、关于安卓手机方面
测试时可以使用,网络调试助手(下载这个app安装在手机即可)发送数字1表示小灯亮,0表示灯灭。后续想深入的话可以自己开发安卓app软件。
三、参数设置
由于参数的设置方法和步奏网上资料很全,这里提供相关的网址自行参考。
Uart-W
物联网
四、资料可能存在不足之处,仅作参考!
/*********************************************************************
名称:延时函数
作用:毫秒级延时,微妙级延时函数,为数据收发完成作等待.......
********************************************************************/
void ms_delay(uint t)
{
uint i,j;
for(i=t;i>0;i--)
PCON=0x80;//SMOD波特率选择位为1,SMOD=1.
BRT=RELOAD_COUNT; //波特率9600 256-晶振频率/波特率x16=BRT
AUXR=0xD5;//T0、T1不12分频,速度是89C51的12倍,启动独立波特率//发生器,每个时钟计数一次
//设置串口1的波特率发生器为独立波特率发生器,
{
SCON=0x50;//设置为串行口以方式1工作,8位异步通讯,允许接收中断。
//一帧信息为10位,1位起始位,8位数据位(低位在先),1位停止位。
PCON=0x80;//SMOD波特率选择位为1,SMOD=1.
TMOD=0x21;//设置定时器1为波特率发生器,工作在模式2,8位自动装载
TH1=RELOAD_COUNT;//波特率9600,TH1=256-FOSC/16/12/波特率