第4章ADAMS软件算法基本理论
adams教程

adams教程Adams教程-基本概念与应用Adams是一种重要的多体动力学仿真软件,广泛应用于机械工程、汽车工程、航空航天工程等领域。
本教程将介绍Adams的基本概念和应用,帮助读者快速入门并掌握该软件的基本操作技巧。
1. Adams简介Adams是一种基于多体动力学理论的仿真软件,能够模拟和分析复杂的机械系统的运动和力学行为。
它采用了基于弹簧、阻尼和惯性模型的多体动力学算法,能够准确地预测系统的运动轨迹、速度、加速度等关键参数。
2. Adams界面与基本操作Adams的界面直观友好,主要包括模型空间、运动学仿真、力学仿真等模块。
在模型空间中,可以创建和修改机械系统的模型;在运动学仿真模块中,可以模拟系统的运动轨迹;在力学仿真模块中,可以分析系统的力学特性。
3. 创建模型与约束在Adams中,模型的创建是基于几何图形和物体的属性。
可以通过导入CAD文件或者手动绘制几何图形来创建模型,并为每个模型设置合适的质量、惯性矩阵等属性。
通过添加约束条件,可以模拟系统中各个物体之间的相对运动关系。
4. 仿真与结果分析一旦模型和约束设置完成,就可以进行仿真分析了。
Adams提供了多种仿真方式,如动态仿真、静态仿真、优化仿真等。
仿真结果可以通过图表、动画等形式进行展示和分析,帮助工程师深入理解系统的运动行为和受力情况。
5. 应用案例最后,本教程将通过一些实际应用案例来展示Adams的具体应用。
例如,利用Adams模拟汽车悬挂系统的运动特性,预测系统在不同路况下的动力学行为;利用Adams模拟飞机起飞和着陆过程,评估系统在不同条件下的稳定性和安全性等等。
通过本教程的学习,读者将能够掌握Adams的基本操作技巧,理解多体动力学仿真的基本原理,并能够利用该软件进行机械系统的仿真分析。
希望读者能够通过这些知识和技能,在工程领域取得更好的成果。
ADAMS基础介绍解析
ADAMS基础介绍解析ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款用于机械动力学分析的工程软件。
它可以模拟和分析复杂的机械系统,例如汽车、飞机、机械手臂等,通过模拟系统运动、受力和应变等情况,帮助工程师优化设计、验证性能和改进产品。
ADAMS的核心功能是通过建立数字模型来模拟机械系统的行为。
用户可以通过ADAMS的图形界面快速创建系统模型,包括模型的几何形状、材料性质、连接方式等。
ADAMS还提供了一个强大的运动学求解器,可以通过定义系统的初始条件和受力情况,模拟系统的动态行为。
用户可以观察系统的运动轨迹、受力分布、应变情况等,并进行详细的分析和评估。
此外,ADAMS还具有多个模块和插件,用于拓展其功能和应用范围。
例如,ADAMS/Car模块是专门针对汽车行业开发的,包括汽车动力学分析、悬挂系统优化、车辆碰撞仿真等功能。
ADAMS/View模块是用于可视化和后处理的工具,可以生成高质量的报告和动画。
ADAMS广泛应用于各个行业和领域,例如汽车制造、飞机设计、工业机械等。
它可以帮助工程师在产品设计阶段评估不同方案的性能,优化机械系统的结构和动力学特性。
在汽车行业,ADAMS可以模拟车辆在不同路况下的悬挂系统响应、刹车性能等,帮助工程师改进悬挂系统设计,提高车辆的驾驶稳定性和安全性。
ADAMS具有以下优点:首先,它具有强大的建模和分析功能,可以模拟和分析复杂的机械系统。
其次,ADAMS提供了友好的图形用户界面,使用户能够轻松创建模型、设置参数和进行分析。
再次,ADAMS提供了丰富的可视化工具和后处理功能,可以直观地展示系统的动态特性和性能指标。
最后,ADAMS还具有丰富的模块和插件,可以满足不同行业和领域的需求。
总之,ADAMS是一款功能强大、应用广泛的机械动力学分析软件。
它可以帮助工程师模拟和分析机械系统的动态响应,并优化设计、验证性能和改进产品。
ADAMS 基本介绍

1. MSC/Nastra n 2. ANSYS 3. ABAQUS 4. I-DEAS 1. Taguchi Method 2. JMP, SAS, SPSS 3. Excel…...
第4章、几何模型建构
几何建模
几何建模是ADAMS/View仿真分析的第一
步,在开始的时候,都要先建立好几何模 型,然后通过约束和载荷等条件的添加完 成虚拟样机模型,以进行容:
第1章、软件介绍 第2章、基本知识 第3章、ADAMS/View仿真步骤 第4章、几何建模 第5章、ADAMS/View的约束 第6章、ADAMS/View中的载荷 第7章、仿真分析 第8章、实例讲解
第1章、软件介绍
1.1、ADAMS介绍
ADAMS是英文Automatic Dynamic Analysis of Mechanical Systems的缩 写,是由美国MDI公司(Mechanical Dynamics Inc.)开发的机械系统动力学 自动分析软件(已被MSC收购)。在当今动 力学分析软件市场上ADAMS独占鳌头, 拥有70%的市场份额,ADAMS拥有 windows版和unix两个版本,目前最高版 本为ADAMS 2005。
第3章、ADAMS/View建模仿真步骤
Virtual Prototyping 整合系統
1. 2. 3. 4. 5. 6. 7. 8. 9.
I-DEAS UG CATIA Pro/E CADDS 5 Solidworks CoCreate AutoCAD Microstation
1. MATRI Xx 2. MATLA B 3. Easy5
4.1、实体模型
ADAMS/View中实体模型的获得有两种方法 :
一:用ADAMS/VIEW建模工具直接建模 二:通过ADAMS/Exchange模块从外部输入模 型文件 后者一般用于复杂零件系统建模。
ADAMS基础介绍

坐标系
状态栏
1.环境介绍
当前坐标值
7
机械系统动力学分析软件
ADAMS/View 工具栏浏览
12 34 56 78
1 几何建模
2 测量
4 铰接
3 恢复/重做
8力
5 色盘
9 10 11 12 13 14 15 16
6 运动驱动
7 移动
9 动态浏览 10 动态浏览 11 前后视图 12 左右视图
13 上下视图 14 背景视图 15 其它 16 视窗布置
模块)
Mechanism/Pro(Pro/Engineer
A/Flex(柔体分析模块)
接口模块)
A/Linear(系统模态分析模块)
CAT/ADAMS(与 CATIA 组合使用
A/Insight (统计分析模块)
的界面)
A/Hydraulics(液压模块)
工具箱模块
A/Vibration(振动分析)
• 自定义对话框
• 敏感度研究 •实验设计
ADAMS软件核心模块
1.环境介绍
6
机械系统动力学分析软件
ADAMS/View 窗口介绍
ADAMS/View…
主菜单 建模与仿真 工具面板 鼠标右键弹 出其它工具
模型标题
工作网格
控制面板
由上面的点 击命令出现 相应的控制 面板
下拉菜单
ADAMS软件核心模块
edges, or face normals Locations of existing
CSs or vertices
ADAMS软件核心模块
1.环境介绍
工作网格的显 示状态
9
机械系统动力学分析软件
第4章ADAMS软件算法基本理论

⎢⎣
sinθ sinφ
−cosψ sinφ −sinψ cosθ cosφ −sinψ sinφ + cosψ cosθ cosφ
sinθ cosφ
sinψ sinθ ⎤
− cosψ
sinθ
⎥ ⎥
cosθ ⎥⎦
(4-12) 定义一个欧拉转轴坐标系,该坐标系的三个单位矢量分别为上面三个欧拉转动的轴, 因而三个轴并不相互垂直。该坐标系到构件质心坐标系的坐标变换矩阵为:
Φ(q,tn ) = 0
(4-8)
运动过程中任一时刻 tn 位置的确定,可由约束方程的 Newton-Raphson 迭代法求得:
Φqj Δq j + Φ(q j , tn ) = 0
(4-9)
其中, Δq j = q j+1 − q j ,表性代数方程的数值方法求解,ADAMS 中提供了两种
Pj = ∂T ∂q& j
(4-17)
第 4 章 ADAMS 软件基本算法
简化表达约束反力为:
∑ C j
=
n i =1
λi
∂Φ ∂q j
这样方程(4-16)可以简化为:
P& j
− ∂T ∂q j
= Qj
−Cj
动能可以近一步表达为:
T = 1 R&T MR& + 1 γ&T BT JBγ&
2
2
其中 M 为构件的质量阵,J 为构件在质心坐标系下的惯量阵。
(3)标架坐标系(Marker System)。标架坐标系又称为标架,是为了简化建模和分析 在构件上设立的辅助坐标系,有两种类型的标架坐标系:固定标架和浮动标架。固定标架
机械系统动力学分析及 ADAMS 应用
adams基本介绍
使用Adams软件对机器人进行动力学模拟和分析,以验证机器人的运动性能和交互效果,以及优化机器人结构和控制系统设计。
机器人动力学模拟
通过Adams软件对医疗器械如假肢、人工关节等进行设计和优化,以提高其适应性和性能。
医疗器械设计优化
利用Adams软件对电子消费品如手机、平板电脑等进行设计和优化,以提高其功能性和用户体验。
Adams软件广泛应用于汽车、航空航天、船舶、机械、电子等领域,帮助用户进行产品设计和性能优化。它主要用于动力学分析、运动学分析、静力学分析以及碰撞检学和运动学分析功能,可进行精确的仿真;
提供丰富的后处理功能,方便用户对结果进行分析和优化。
Adams软件具有以下特点与优势
汽车底盘动态模拟
使用Adams软件对汽车底盘进行动力学模拟,以验证底盘的稳定性和操控性能,以及优化底盘结构和悬挂系统设计。
汽车动力总成分析
利用Adams软件对汽车动力总成进行性能分析和优化,以提高汽车的动力和经济性能。
飞行器气动分析
使用Adams软件对飞行器进行气动力学模拟和分析,以预测飞行器的空气动力学性能,以及优化机身和机翼设计。
03
CHAPTER
Adams软件建模
Adams是一款由美国机械动力学公司(Mechanical Dynamics Inc., MDI)开发的高级仿真软件,被广泛应用于机械、汽车、航空航天、电子、石油化工等领域。Adams可以快速建立复杂的多体动力学模型,并进行仿真计算,为产品设计、优化和制造提供了强有力的支持。
支持多种建模工具,可快速建立复杂的多体动力学模型;
支持与其他CAD/CAE软件进行数据交换和集成;
01
02
03
04
05
ADAMS基础介绍
仅仅包括 model 原件与其属性 文件很小, 文字档(可阅读),可跨平台 只包含一个 model !!!
ADAMS 可导入/出的文件格式还有 :
ADAMS/Solver 输入文件 (.adm) 模型交换文件 (STEP,IGES,DXF,DWG,Wavefront,
Open/Closed, Knot Points, Anchor CSM, Parent Part
2.实体建模
16
机械系统动力学分析软件
简单几何实体建造
Type
Tool
Boxes
Cylinders
Spheres/ Ellipsoids
Frustums
Torus
Graphic
Parameters
Length (x), Height (y), Depth(z), Anchor CSM, Parent Part
可移动的零件 具有质量、惯性矩 不会变形
Flexible Bodies
可移动的零件 具有质量、惯性矩
当承受作用力时会变形
Point Masses
可移动的零件 具有质量但沒有惯性矩
Ground Part
在每一个 model 都存在 永远保持固定不动 model建立时会自动建立 不会对 model 增加 DOF
stereolithography,Parasolid, etc)
测试文件、计算结果表格文件等 仿真结果文件 (.msg, .req, .out, .gra, .res).
ADAMS 基礎訓練課程软 件核心模块
设定工作目录 2.实体建模
13
机械系统动力学分析软件
ADAMS基础知识讲解

ADAMS基础知识讲解1、单位开始时需要为模型设置单位。
在所有的预置单位系统中,时间单位为秒,⾓度为度。
可设置:MMKS--长度千⽶,质量为千克,⼒为⽜顿。
MKS—长度为⽶,质量为千克,⼒为⽜顿。
CGS—长度为厘⽶,质量为克,⼒为达因。
IPS—长度为英⼨,质量为斯勒格(slug),⼒为磅。
2、如何永久改变ADAMS的启动路径?在ADAMS启动后,每次更改路径很费时,我们习惯将⾃⼰的⽂件存在某⼀⽂件夹下;事实上,在Adams的快捷⽅式上右击⿏标,选属性,再在起始位置上输⼊你想要得路径就可以了。
3、坐标系当第⼀次启动ADAMs/View时,在窗⼝的左下⾓显⽰⼀个三视坐标轴。
该坐标轴为模型数据库的全局坐标系。
缺省情况下,ADAMS/View⽤笛卡⼉坐标系作为全局坐标系。
ADAMS/View将全局坐标系固定在地⾯上。
当创建零件时,ADAMS/View给每个零件分配⼀个坐标系,也就是局部坐标系。
零件的局部坐标系随着零件⼀起移动。
局部坐标系可以⽅便地定义物体的位置。
ADAMS/View也可返回如零件的位置——零件局部坐标系相对于全局坐标系的位移的仿真结果。
局部坐标系使得对物体上的⼏何体和点的描述⽐较⽅便。
物体坐标系不太容易理解。
你可以⾃⼰建⼀个part,通过移动它的位置来体会。
4、物体的位置和⽅向的修改可以有两种途径修改物体的位置和⽅向,⼀种是修改物体的局部坐标系的位置,也就是通过modify物体的position属性;另⼀种⽅法就是修改物体在局部坐标系中的位置,可以通过修改控制物体的关键点来实现。
我感觉这两种⽅法的结果是不同的,但是对于仿真过程来说,物体的位置就是质⼼的位置,所以对于仿真是⼀样的。
5、⽅向的描述对于初学的⼈来说,⽅向的描述不太容易理解。
之前我们都是⽤⽅向余弦之类的量来描述⽅向的。
在ADAMS中,为了求解⽅程时计算的⽅便,使⽤欧拉⾓来描述⽅向。
就是⽤绕坐标轴转过的⾓度来定义。
旋转的旋转轴可以⾃⼰定义,默认使⽤313,也就是先绕Z轴,再绕X轴,再绕Z轴。
ADAMS基础理论
一、机械系统结构的数学描述
• 拓扑分类: • 1)有根系统——系统与 运动为已知的构件B0有 铰联系,如机械系统。 • 2)无根系统——系统与 运动为已知的构件B0无 铰联系,如星球——航 天器系统。
一、机械系统结构的数学描述
• 树系统——任意两构件 之间的路为唯一的系 统,如机械臂。 • 非树系统(回路系 统)——反之,如铰链 四杆机构。 • 非树系统可以人为地切 断回路中的某些约束 (铰)变成树系统。
Ny o Nx
X N x mc x Y N y mg mc y M o mg xc J
约束 方程 组
动力 学方 程组
c质心(xc ,yc) 2 2 2 mg xc yc oc
tan yc / xc
待求量为: xc yc N x N y
1 0 0 0
2
1
1
1
xm 1 xm hf ( xm , tm )
二、机械系统动力学方程解法
• 对微分方程组可有对应的数值解法。 • 数值方法求得的解为近似解。 • 对于二阶微分方程,如:
X N x mxc
• 可用递推公式先求 xc ,然后再求 xc 。
三、优化方法基础
f ( xc , yc ) ( x y oc ) (tan yc / xc )
2 c 2 c 2 2
2
• 求使该函数取得最小值的解即为上述非线性 约束方程组的解。
四、非线性方程组解法
• 数值寻优方法求得的解为近似解。需设置精 度和迭代次数。达到精度或达到迭代次数时 终止循环。
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
数值迭代寻优方法-瞎子爬山法
多体系统动力学分析软件ADAMS的介绍
多体系统动力学分析软件ADAMS的介绍ADAMS是美国学者蔡斯(Chace)等人利用多刚体动力学理论,选取系统每个刚体的质心在惯性参考系中的三个直角坐标和反映刚体方位的为广义坐标编制的计算程序。
其中应用了吉尔(Gear)等解决刚性积分问题的算法,并采用了稀疏矩阵技术来提高计算效率。
该软件因其强大的功能而在汽车航天等领域得到了广泛的应用。
1 ADAMS软件简介在研究汽车各种性能时,研究对象的建模、分析与求解始终是关键。
多体系统动力学软件为汽车动力学研究提供了强大的数学分析工具。
ADAMS软件就是其中的佼佼者。
ADAMS(Auto matic Dynamic Analysis of Mechanical System)软件,是由美国机械动力公司(Mechanical Dynamics Inc.)开发的最优秀的机械系统动态仿真软件,是世界上最具权威性的,使用范围最广的机械系统动力学分析软件。
用户使用ADAMS软件,可以自动生成包括机-电-液一体化在内的、任意复杂系统的多体动力学数字化虚拟样机模型,能为用户提供从产品概念设计、方案论证、详细设计、到产品方案修改、优化、试验规划甚至故障诊断各阶段、全方位、高精度的仿真计算分析结果,从而达到缩短产品开发周期、降低开发成本、提高产品质量及竞争力的目的。
由于ADAMS软件具有通用、精确的仿真功能,方便、友好的用户界面和强大的图形动画显示能力,所以该软件已在全世界数以千计的著名大公司中得到成功的应用。
ADAMS软件一方面是机械系统动态仿真软件的应用软件,用户可以运用该软件非常方便地对虚拟样机进行静力学、运动学和动力学分析。
另一方面,又是机械系统仿真分析开发工具,其开放性的程序结构和多种接口,可以成为特殊行业用户进行特殊机械系统动态仿真分析的二次开发工具平台。
在产品开发过程中,工程师通过应用ADAMS软件会收到明显效果:*分析时间由数月减少为数日*降低工程制造和测试费用*在产品制造出之前,就可以发现并更正设计错误,完善设计方案*在产品开发过程中,减少所需的物理样机数量*当进行物理样机测试有危险、费时和成本高时,可利用虚拟样机进行分析和仿真*缩短产品的开发周期使用ADAMS建立虚拟样机非常容易。
ADAMS学习资料
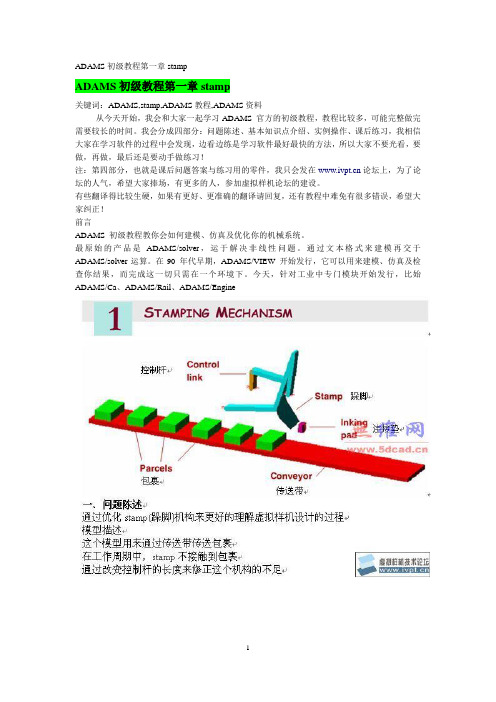
ADAMS初级教程第一章stampADAMS初级教程第一章stamp关键词:ADAMS,stamp,ADAMS教程,ADAMS资料从今天开始,我会和大家一起学习ADAMS 官方的初级教程,教程比较多,可能完整做完需要较长的时间。
我会分成四部分:问题陈述、基本知识点介绍、实例操作、课后练习,我相信大家在学习软件的过程中会发现,边看边练是学习软件最好最快的方法,所以大家不要光看,要做,再做,最后还是要动手做练习!注:第四部分,也就是课后问题答案与练习用的零件,我只会发在论坛上,为了论坛的人气,希望大家捧场,有更多的人,参加虚拟样机论坛的建设。
有些翻译得比较生硬,如果有更好、更准确的翻译请回复,还有教程中难免有很多错误,希望大家纠正!前言ADAMS 初级教程教你会如何建模、仿真及优化你的机械系统。
最原始的产品是ADAMS/solver,运于解决非线性问题。
通过文本格式来建模再交于ADAMS/solver运算。
在90 年代早期,ADAMS/VIEW 开始发行,它可以用来建模、仿真及检查你结果,而完成这一切只需在一个环境下。
今天,针对工业中专门模块开始发行,比始ADAMS/Ca、ADAMS/Rail、ADAMS/Engine三、实例操作第一操作练习:打开ADAMS/View官方的教程上分W 与U 的操作系统来说的,还有多种打开ADAMS/View 的方法,我个人觉得这些地方就不需要那么认真了,你只会双击快捷方式和开始中找到快捷方式单击就可以了。
打开后会出现这样的对话框,我们简单的介绍一下这里我们是导入一个.cmd 格式的文件(文件可 相应章节下载,文件名为stamp.cmd),具体操作步骤,下面章节再有相同操作可参考这里第二个操作练习:改变模型在这个操作练习中你会练习如何改变控制杆的长度(control_link)注:官方教程中此练习是导入的aview.cmd 文件,此文件包含菜单、宏、对话框等信息,但我下载的练习aview.cmd 文件出错,所以只有一个一个导入了,不过没关系,我们也学会了这种分别导入的方法1、在Stamper菜单下选择Setting Up Model.(只导入stamp.cmd 后没有Stamper菜单,此时需再导入stamper_menu.cmd 文件,方法同上)选择后Stamper_Setup dialog box 会出现,不过这里会出错,不怕,再导入一个stamping1_dbox.cmd 后出现下图2、使用箭头按纽来调整control_link 的长度随着箭头的调整control_link 的长度每次以3mm 的大小变化与control_link 连接的构件会随着control_link 长度的变化自动调整3、使用箭头按纽来调整来观察模型的变化,可以使用RESET恢复到原始值更多精彩,源自无维网()!第三个操作练习:对模型进行仿真,通过仿真观察模型是如何运动的1、从Stamper menu 选择Simulate.,同上需导入stamping2_dbox.cmd 后会出现2、如果要进行仿真,确定Single选项是被勾上的3、点APPLY来解此模型的运动方程,即进行仿真注:选择模型在at every output step 显示,如果你从At Every Output Step 变成Never则模型不会更新,但软件会运算得更快当一次single 仿真完成,ADAMS/View 将会告诉你penetration 是什么,一个正数代表penetration第四个操作练习:检测结果通过图表与动画来检测仿真后的结果1、从Stamper menu 选择Investigate Results,同上导入stamping3_dbox.cmd 文件后出现下图(图Measure Stamp Height Above Parcels显示了stamper高出parcels距离随时间的变化)4、点Save Curve保存当前的曲线,则下次的仿真曲线不会覆盖此曲线,但会重写已何存的曲线第五个操作练习:手动找到正确的高度在此操作中调整模型的高度从而找到正确的高度来满足与parcels 接触的最小机会重复上面的步骤,即使用 3 mm 作为增量来增加control_link 的长度直至你找到stamp 与parcels 接触时control_link 的长度如果stamp_height > 0, stamper 不与parcels 接触如果stamp_height < 0, stamper 与parcels. 接触,即重复第六个操作练习:进行设计研究此操作你要进行一次设计研究,此练习中会使用你指定的control_link 长度上下限与运算的次数来自动进行分析,默认的值你可以根椐需要进行修改。
ADAMS的全面详细教程
ADAMS的全面详细教程ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款用于机械系统动力学分析的软件。
它可以模拟多种机械系统,并对其进行运动和应力分析。
本文将详细介绍ADAMS的全面教程,包括软件介绍、建模、分析和结果可视化等方面。
一、软件介绍ADAMS是一款由MSC Software开发的强大的机械系统动力学分析软件。
它主要用于汽车、飞机、船舶等多种机械系统的运动和应力分析。
ADAMS具有强大的模拟能力和精确的结果,可以帮助工程师更好地了解和优化机械系统的性能。
二、建模在ADAMS中,建模是创建机械系统的第一步。
可以通过拖放和连接不同的组件来组装整个系统。
ADAMS提供了丰富的组件库,包括刚体、约束、驱动器等。
用户可以根据实际情况选择适合的组件,并进行调整和定制。
在建模过程中,需要定义组件的几何属性、材料属性和运动属性。
几何属性包括尺寸和形状,材料属性包括密度和弹性系数,运动属性包括初始位置和速度等。
对于复杂的组件,可以通过导入CAD文件来简化建模过程。
三、分析建模完成后,可以进行各种类型的分析。
ADAMS主要支持以下几种分析方法:1.静态分析:用于计算机械系统在静力学条件下的平衡状态、应力和变形等。
可以通过施加外力或约束来模拟不同的加载情况,进而评估系统的稳定性和可靠性。
2.动态分析:用于计算机械系统在动力学条件下的运动和响应。
可以模拟系统的时间响应、频率响应和振动模态等。
动态分析可以帮助工程师更好地评估系统的性能和安全性。
3.暂态分析:用于计算机械系统在瞬时变化条件下的响应。
可以模拟系统的瞬时冲击、加速度变化和速度变化等。
暂态分析可以帮助工程师更好地理解系统的动态行为和响应。
四、结果可视化在分析完成后,可以通过结果可视化功能来查看和分析结果。
ADAMS提供了直观的3D画面和图表,可以展示系统的运动、应力、变形和动力学特性等。
ADAMS基础介绍解析

Mechanical Dynamics。 最高版本MSC.ADAMS 2005版。
ADAMS软件核心模块
2
机械系统动力学分析软件
ADAMS 家族
核心模块
A/Tire(轮胎模块)
A/View(用户界面模块)
A/Car(工业汽车模块)
ADAMS软件核心模块
4
机械系统动力学分析软件
目录 :ADAMS基础
1: 环境介绍 2: 实体建模 3: 连接介绍 4: 物体运动行为负载 5:测量 (Measure) 6: 仿真模拟 & Sensor 7: 绘制图表 8: 定义设计变量 9: 实验设计 (DOE) 10: 最优化设计 11: 自定义对话框 12: 作用力 (Applied Force) 13: 模拟仿真形式 14: 解线性化 (Linearation) 15: 其它工具 16: 基本contact建模 17: 弹性体Flexible body建模 18: 基本控制程序--Controls Block 19: 参数化设计
A/Solver(求解器模块)
A/Rail(轨道车轮模块)
A/Postprocessor(加强后处理
A/Figure 、Android、LifeMod
器模块)
接口模块
扩展模块
A/Control(控制模块)
A/AutoFlex(柔性体自动生成
A/Exchange(图形交换接口)
• 结果比较
REFINE ITERATE
• 输入法则(Methodology) •加入摩擦 滑动等参数
• What if? • 建立参数(Parameters)
第4章ADAMS软件算法基本理论

第4章ADAMS软件基本算法本章主要介绍ADAMS软件的基本算法,包括ADAMS建模中的一些基本概念、运动学分析算法、动力学分析算法、静力学分析及线性化分析算法以及ADAMS软件积分器介绍。
通过本章的学习可以对ADAMS软件的基本算法有较深入的了解,为今后合理选择积分器进行仿真分析提供理论基础,为更好地使用ADAMS打下良好的理论基础。
4.1 ADAMS建模基础ADAMS利用带拉格朗日乘子的第一类拉格朗日方程导出――最大数量坐标的微分-代数方程(DAE)。
它选取系统内每个刚体质心在惯性参考系中的三个直角坐标和确定刚体方位的三个欧拉角作为笛卡尔广义坐标,用带乘子的拉格朗日第一类方程处理具有多余坐标的完整约束系统或非完整约束系统,导出以笛卡尔广义坐标为变量的动力学方程。
4.1.1 参考标架在计算系统中构件的速度和加速度时,需要指定参考标架,作为该构件速度和加速度的参考坐标系。
在机械系统的运动分析过程中,有两种类型的参考标架——地面参考标架和构件参考标架。
地面参考标架是一个惯性参考系,它固定在一个“绝对静止”的空间中。
通过地面参考标架建立机械系统的“绝对静止”参考体系,属于地面标架上的任何一点的速度和加速度均为零。
对于大多数问题,可以将地球近似为惯性参考标架,虽然地球是绕着太阳旋转而且地球还有自转。
对于每一个刚性体都有一个与之固定的参考标架,称为构件参考标架,刚性体上的各点相对于该构件参考标架是静止的。
4.1.2 坐标系的选择机械系统的坐标系广泛采用直角坐标系,常用的笛卡尔坐标系就是一个采用右手规则的直角坐标系。
运动学和动力学的所有矢量均可以用沿3个单位坐标矢量的分量来表示。
坐标系可以固定在一个参考标架上,也可以相对于参考框架而运动。
合理地设置坐标系可以简化机械系统的运动分析。
在机械系统运动分析过程中,经常使用3种坐标系:(1)地面坐标系(Ground Coordinate System)。
地面坐标系又称为静坐标系,是固定在地面标架上的坐标系。
ADAMS有限元分析

ADAMS有限元分析1. 简介ADAMS(Automatic Dynamic Analysis of Mechanical Systems,机械系统动力学的自动化分析)是一种在机械工程领域广泛使用的有限元分析软件。
它可以模拟机械系统的动力学行为,帮助工程师在设计过程中评估系统的性能和可靠性。
ADAMS通过利用有限元方法和动力学模型,可以模拟复杂机械系统的运动、振动、应力和变形等物理效应,并提供全面的分析结果。
2. 工作原理ADAMS的分析过程基于有限元方法和动力学模型。
有限元方法是一种常用的数值计算方法,将连续体划分为大量的小单元,通过计算每个单元的相互作用,得到整个系统的响应。
动力学模型是一种描述物体在力的作用下随时间演化的模型,用于分析物体的力学行为。
在ADAMS中,用户首先需要建立机械系统的几何模型。
这可以通过绘制各个零件的几何形状或导入CAD模型来实现。
然后,用户需要给每个零件分配材料属性和初始条件,以便ADAMS能够正确计算物体的应力和变形。
接下来,用户需要定义系统的边界条件和加载条件,以模拟实际工作环境中的力和约束。
ADAMS会根据用户提供的信息自动生成有限元网格,并根据动力学模型进行求解。
求解过程中,ADAMS会考虑材料的力学性质、物体的自由度、力的作用点和作用方向等因素,计算出物体在给定时间内的运动状态、应力分布和变形情况。
3. 功能与应用ADAMS提供了丰富的功能和工具,适用于各种机械系统的分析和设计。
以下是ADAMS的主要功能和应用:3.1 动态仿真ADAMS可以模拟机械系统在不同加载条件下的动态响应。
用户可以通过改变加载条件、调整系统参数和观察运动轨迹等方式,评估系统的动态性能、优化设计和改进操作。
3.2 振动分析ADAMS可以对机械系统的振动特性进行分析。
用户可以计算系统的固有频率、模态形式和振动衰减情况,以评估系统的结构稳定性和振动抑制。
3.3 应力分析ADAMS可以计算机械系统中零件和结构的应力分布。
ADAMS的全面教程
ADAMS的全面教程ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种用于机械系统动力学分析的软件工具。
它是一个基于事件驱动的多体动力学仿真软件,用于分析和优化各种机械系统的动力学行为。
接下来,我们需要使用约束建模工具将机械系统的各个部分连接起来。
ADAMS提供了丰富的约束条件和约束工具,可以帮助我们定义机械系统的约束条件,如固定连接、滑动连接等。
然后,我们需要对机械系统的元素进行力学建模。
ADAMS提供了各种力学模型,包括质点、刚体、弹性体等。
我们可以通过设置这些模型的质量、惯性等属性来定义机械系统的物理特性。
完成建模后,我们需要定义机械系统的初始条件和加载条件。
初始条件包括初始位置、初始速度等,加载条件包括外部力、电机驱动力等。
通过设置这些条件,可以模拟机械系统在不同工况下的运动行为。
完成建模和条件设置后,我们可以使用ADAMS进行仿真分析。
ADAMS提供了多种仿真分析功能,包括运动仿真、力学仿真等。
我们可以通过设置仿真参数,如仿真时间、时间步长等,进行仿真分析。
在仿真分析过程中,ADAMS会自动计算机械系统的动力学行为,并生成相应的结果。
这些结果包括位移、速度、加速度等,可以帮助我们更好地理解机械系统的动力学特性。
除了仿真分析外,ADAMS还提供了优化分析功能。
我们可以使用ADAMS进行设计优化,通过改变机械系统的参数,如尺寸、材料等,来优化系统的性能。
ADAMS会自动计算出最优参数,并生成相应的优化结果。
此外,ADAMS还提供了结果分析和可视化功能。
我们可以使用ADAMS 的结果分析工具对仿真结果进行统计和分析,如最大位移、最大应力等。
同时,ADAMS还提供了强大的可视化功能,可以将仿真结果以图形、动画等形式进行展示。
总之,ADAMS是一种功能强大的机械系统动力学分析工具。
通过完善的建模工具、仿真分析功能和优化分析功能,它可以帮助工程师们更好地理解机械系统的动力学行为,优化设计,提高性能。
adams 教程

adams 教程Adams 是一款多领域仿真软件,可以在机械、电子、自动化等领域被广泛应用。
这篇教程将带你了解 Adams 的基本使用方法,帮助你快速上手。
安装 Adams首先,你需要下载并安装 Adams 软件。
在安装过程中,确保选择正确的安装路径和软件版本,以及安装所需的附加模块。
创建模型在 Adams 中,可以通过两种方式创建模型:从零开始创建或导入现有的 CAD 模型。
如果选择从零开始创建模型,可以使用 Adams 提供的建模工具,如几何建模、约束设定等。
这些工具允许你通过绘制实体、添加约束等方法创建你所需要的模型。
如果已经有了 CAD 模型,可以直接将其导入到 Adams 中。
Adams 支持多种 CAD 格式,如 STEP、IGES、CATIA、SolidWorks 等。
设置模拟参数在开始仿真之前,需要设置模拟参数。
这些参数包括模拟的时间范围、时间步长、初始条件等。
通过设置这些参数,可以控制仿真的精度和速度。
添加仿真步骤在 Adams 中,仿真被分割为多个步骤。
每个步骤都可以包含不同的载荷条件、约束条件和运动条件。
通过添加和配置这些步骤,可以实现不同的仿真场景。
运行仿真一切准备就绪后,可以开始运行仿真。
通过点击“运行”按钮,Adams 会根据你所设定的参数进行仿真计算,并生成仿真结果。
分析和优化在仿真结束后,可以对仿真结果进行分析和优化。
Adams 提供了多种分析工具,如动力学分析、应力分析、优化算法等。
通过这些工具,可以深入了解系统的行为,并对模型进行优化。
总结通过本教程,你已经了解了 Adams 的基本使用方法。
希望这些知识能帮助你快速上手 Adams 软件,并在实际工程中发挥它的作用。
如需进一步了解,可以查阅 Adams 的官方文档或参考其他相关资源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
固定在构件上,并随构件运动.可以通过固定标架在局部构件参考坐标系中的位置和方向, 确定固定标架坐标系的位置和方向.固定标架可以用来定义构件的形状,质心位置,作用 力和反作用力的作用点,构件之间的连接位置等.浮动标记相对于构件运动,在机械系统 的运动分析过程中,有些力和约束需要使用浮动标架来定位. 动力学方程的求解速度很大程度上取决于广义坐标的选择.研究刚体在惯性空间中的 一般运动时,可以用它的质心标架坐标系确定位置,用质心标架坐标相对地面坐标系的方 向余弦矩阵确定方位.为了解析地描述方位,必须规定一组转动广义坐标表示方向余弦矩 阵.第一种方法是用方向余弦矩阵本身的元素作为转动广义坐标,但是变量太多,同时还 要附加六个约束方程;第二种方法是用欧拉角或卡尔登角作为转动坐标,它的算法规范, 缺点是在逆问题中存在奇点,在奇点位置附近数值计算容易出现困难;第三种方法是用欧 拉参数作为转动广义坐标, 它的变量不太多, 由方向余弦计算欧拉角时不存在奇点. ADAMS 软件用刚体
4.2.2 ADAMS 运动学方程的求解算法
在 ADAMS 仿真软件中,运动学分析研究零自由度系统的位置,速度,加速度和约束 反力,因此只需求解系统的约束方程:
Φ ( q, tn ) = 0
(4.2-8)
运动过程中任一时刻 t n 位置的确定,可由约束方程的 Newton-Raphson 迭代法求得:
4.1 ADAMS 建模基础
ADAMS 利用带拉格朗日乘子的第一类拉格朗日方程导出――最大数量坐标的微分- 代数方程 (DAE) 它选取系统内每个刚体质心在惯性参考系中的三个直角坐标和确定刚体 . 方位的三个欧拉角作为笛卡尔广义坐标,用带乘子的拉格朗日第一类方程处理具有多余坐 标的完整约束系统或非完整约束系统,导出以笛卡尔广义坐标为变量的动力学方程.
本章主要介绍 ADAMS 软件的基本算法,包括 ADAMS 建模中的一些基本概念,运动 学分析算法,动力学分析算法,静力学分析及线性化分析算法以及 ADAMS 软件积分器介 绍.通过本章的学习可以对 ADAMS 软件的基本算法有较深入的了解,为今后合理选择积 分器进行仿真分析提供理论基础,为更好地使用 ADAMS 打下良好的理论基础.
Pj = T & q j
简化表达约束反力为:
n
(4.3-6-17)
C j = ∑ λi
& q = Φ q 1Φ t
(4.2--10)
机械系统动力学分析及 ADAMS 应用
&& & & & q = Φ q 1 (Φ q q )q q + 2Φ qt q + Φ tt
(4.2-11)
4.3 ADAMS 动力学分析
4.3.1 ADAMS 动力学方程
cosψ cos φ sinψ cos θ sin φ A = sinψ cos φ + cosψ cos θ sin φ sin θ sin φ
gi
cosψ sin φ sinψ cos θ cos φ sinψ sin φ + cosψ cos θ cos φ sin θ cos φ
阵,其定义为 (Φ q ) (i , j ) = Φ i q j .在这里 Φ q 为 nc × nc (nh 个运动学约束,nc-nh 个 驱动约束,nc 个广义坐标)的方阵.
矩阵 Φ q ,为雅可比矩阵,如果 Φ 的维数为 m,q 维数为 n,那么 Φ q 维数为 m × n 矩
K K K Φ K (q) = [Φ1 (q), Φ 2 (q ),……, Φ nh (q)]T = 0
( (4.2--1)
考虑运动学分析,为使系统具有确定运动,要使系统实际自由度为零,为系统施加等 于自由度( nc nh )的驱动约束:
Φ D ( q, t ) = 0
带格式的: 缩进: 首行缩进: 2 字 格式的 符
ωe = γ&
(4.3-4-15)
考虑约束方程则系统的动力学方程,ADAMS 利用带拉格朗日乘子的拉格朗日第一类 方程的能量形式得到如下方程:
n d T T Φ ( ) = Q j + ∑ λi & dt q j q j q j i =1
4.2 ADAMS 运动学分析
4.2.1 ADAMS 运动学方程
利用 ADAMS 建立机械系统仿真模型时,系统中构件与地面或构件与构件之间存在运 动副的联接,这些运动副可以用系统广义坐标表示为代数方程,这里仅考虑完整约束.设 表示运动副的约束方程数为 nh ,则用系统广义坐标矢量表示的运动学约束方程组为:
…………………………………………………… ……(4.2--2)
在一般情况下,驱动约束是系统广义坐标和时间的函数.驱动约束在其集合内部及其与运 动学约束合集中必须是独立和相容的,在这种条件下,驱动系统运动学上是确定的,将作 确定运动. 由式(4.2-1)表示的系统运动学约束和式(4.2-2)表示的驱动约束组合成系统所受的 全部约束:
sinψ sin θ cosψ sin θ cos θ
带格式的: 缩进: 悬挂缩进: 31.5 格式的 字符, 左 2 字符, 首行缩进: -31.5 字符
( (4.3-12) 定义一个欧拉转轴坐标系,该坐标系的三个单位矢量分别为上面三个欧拉转动的轴, 因而三个轴并不相互垂直.该坐标系到构件质心坐标系的坐标变换矩阵为:
第4章
ADAMS 软件基本算法
Φ K ( q , t ) Φ ( q, t ) = D =0 Φ ( q, t )
(4.2-3)
…………………………….……………
式(4.2-3)为 nc 个广义坐标的 nc 个非线性方程组,其构成了系统位置方程. 对式(4.2-3)求导,得到速度约束方程:
……………………………………..…
(4.2-5) பைடு நூலகம்式(2.24-4)求导,可得加速度方程:
& & & 若令 η = (Φ q q ) q q 2Φ qt q Φ tt ,则加速度方程为: && & && && & Φ ( q, q, q, t ) = Φ q ( q, t ) q η ( q, q, t ) = 0
ADAMS 中用刚体 B 的质心笛卡尔坐标和反映刚体方位的欧拉角作为广义坐标,即
q = [ x, y, z ,ψ , θ , ]T ,令 R = [ x, y, z ] , γ = [ψ , θ , φ ] , q = [ RT , γ T ]T .构件质心参考
T T
坐标系与地面坐标系间的坐标变换矩阵为:
& & & Φ ( q, q, t ) = Φ q ( q, t ) q + Φ t ( q, t ) = 0
(4.2-4) 若令 υ = Φ t (q, t ) ,则速度方程为:
………………………….…
& & & Φ ( q, q, t ) = Φ q ( q , t ) q υ = 0
Bi 的 质 心 笛 卡 尔 坐 标 和 反 映 刚 体 方 位 的 欧 拉 角 作 为 广 义 坐 标 , 即
T T T qi = [ x, y, z ,ψ ,θ , ]T , q = [q1 , q 2 , L , q n ]T .由于采用了不独立的广义坐标,系统动力
学方程虽然是最大数量,但却是高度稀疏耦合的微分代数方程,适用于稀疏矩阵的方法高 效求解.
4.1.1 参考标架
在计算系统中构件的速度和加速度时,需要指定参考标架,作为该构件速度和加速度 的参考坐标系.在机械系统的运动分析过程中,有两种类型的参考标架——地面参考标架 和构件参考标架.地面参考标架是一个惯性参考系,它固定在一个"绝对静止"的空间中. 通过地面参考标架建立机械系统的"绝对静止"参考体系,属于地面标架上的任何一点的 速度和加速度均为零.对于大多数问题,可以将地球近似为惯性参考标架,虽然地球是绕 着太阳旋转而且地球还有自转.对于每一个刚性体都有一个与之固定的参考标架,称为构 件参考标架,刚性体上的各点相对于该构件参考标架是静止的.
(4.3--165)
T 为系统广义坐标表达的动能, q j 为广义坐标, Q j 为在广义坐标 q j 方向的广义力, 最后一项涉及约束方程和拉格朗日乘子表达了在在广义坐标 q j 方向的约束反力.
第4章
ADAMS 软件基本算法
ADAMS 中近一步引入广义动量:
本文由libo050009贡献
doc文档可能在WAP端浏览体验不佳。建议您优先选择TXT,或下载源文件到本机查看。
样式定义: 步骤: 缩进: 左 式定义 符, 首行缩进: 1.99 字符
0 字
第4章
ADAMS 软件基本算法
带格式的: 缩进: 首行缩进: 0 字 格式的 符
(4.2-7)
&& & && && & & & Φ (q, q, q, t ) = Φ q (q, t )q + (Φ q (q, t )q) q q + 2Φ qt (q, t )q + Φ tt (q, t ) = 0 …
(4.2-6)
…………………………
Φ q j q j + Φ (q j , tn ) = 0
其中, q j = q j +1 q j ,表示第 j 次迭代.
(4.2-9)
tn 时刻速度,加速度可以利用线性代数方程的数值方法求解,ADAMS 中提供了两种