Ch16第十六章软驱的设计分析
机械设计基础课后习题答案 第16章

16-1解由手册查得6005 深沟球轴承,窄宽度,特轻系列,内径,普通精度等级(0级)。
主要承受径向载荷,也可承受一定的轴向载荷;可用于高速传动。
N209/P6 圆柱滚子轴承,窄宽度,轻系列,内径,6级精度。
只能承受径向载荷,适用于支承刚度大而轴承孔又能保证严格对中的场合,其径向尺寸轻紧凑。
7207CJ 角接触球轴承,窄宽度,轻系列,内径,接触角,钢板冲压保持架,普通精度等级。
既可承受径向载荷,又可承受轴向载荷,适用于高速无冲击, 一般成对使用,对称布置。
30209/P5 圆锥滚子轴承,窄宽度,轻系列,内径,5级精度。
能同时承受径向载荷和轴向载荷。
适用于刚性大和轴承孔能严格对中之处,成对使用,对称布置。
16-2解室温下工作;载荷平稳,球轴承查教材附表 1,( 1)当量动载荷时在此载荷上,该轴承能达到或超过此寿命的概率是 90%。
( 2)当量动载荷时16-3解室温下工作;载荷平稳,球轴承当量动载荷查教材附表1,可选用轴承6207(基本额定动载荷)。
16-4解(1)计算当量动载荷查手册, 6313的,,查教材表16-12,并插值可得,所以,当量动载荷( 2)计算所需基本额定动载荷查教材表 16-9,室温下工作;查教材表16-10有轻微冲击,球轴承因所需的,所以该轴承合适。
16-5解选择轴承型号查教材表 16-9,工作温度125℃时,;载荷平稳,选用球轴承时,查教材附表 1,根据和轴颈,可选用球轴承6408(基本额定动载荷). 选用滚子轴承时,查教材附表 1,根据和轴颈,可选用圆柱滚子轴承N208(基本额定动载荷( 2)滚子轴承的载承能力较大,并查手册可知其径向尺寸小。
16-6解( 1)按题意,外加轴向力已接近,暂选的角接触轴承类型70000AC。
( 2)计算轴承的轴向载荷 (解图见16.4b) 由教材表 16-13查得,轴承的内部派生轴向力,方向向左,方向向右因轴承 1被压紧轴承 2被放松( 3)计算当量动载荷查教材表 16-12,,查表16-12得,查表16-12得,( 3)计算所需的基本额定动载荷查教材表 16-9,常温下工作,;查教材表16-10,有中等冲击,取;球轴承时,;并取轴承1的当量动载荷为计算依据查手册,根据和轴颈,选用角接触球轴承7308AC合适(基本额定动载荷16-7 根据工作要求,选用内径的圆柱滚子轴承。
毕业设计任务指导书_WZ16-16挖掘装载机
机电学院毕业设计指导书课题名称WZ16-16挖掘装载机挖掘工作装置的设计教学系、部、室车辆工程系专业工程机械指导教师崔国华一、设计题目WZ16-16挖掘装载机挖掘工作装置的设计图1 挖掘装载机三维结构简图二、设计参数1.挖掘装载机基本结构挖掘装载机具有装载、挖掘两种功能,俗称“两头忙”。
根据GB10186-88(挖掘装载机术语),挖掘装载机(backhoe loader)定义为:一种机体前部装有装载装置,机体后部装有反铲挖掘装置的自行式机械。
作为反铲挖掘使用时,是通过铲斗机械方向运动进行地平面以下的挖掘。
作为装载机使用时,通过机体向前运动,装载斗进行装载或挖掘,并可提升、运料和卸料。
目前挖掘装载机的基本配置结构如下:(1)车架:车架有整体式和铰接式两种,其中主流产品都是采用整体式车架,铰接式车架是在小型装载机的基础上改装的,仅有少数几家公司采用这一结构。
铰接式车架最大缺陷是在挖掘作业时的刚性差。
(2)传动系统:主要采用液力机械传动。
变速箱有同步换档变速箱和动力换档变速箱,档位一般是前四后四。
液力变矩器带有动力换向装置,可在行进过程中改变行驶方向,装载时提高了作业的效率。
驱动方式目前一般都有两种模式,即两轮驱动和四轮驱动,在公路上行驶采用两轮驱动,越野和装载作业时采用四轮驱动。
(3)液压系统:有两种主流配置:定量液压系统和变量液压系统。
CASE 和 JCB 等多数公司均采用定量液压系统,而 CATERPILLAR 和 VOLVO 则采用负荷敏感变量液压系统。
变量系统可根据负载的大小调整泵的排量,因此降低了油耗,液压系统的发热量减小,但价格较高,对系统的清洁度要求很高;定量系统功率利用率较低,系统发热量大,但是价格便宜。
(4)工作装置:挖掘装载机的挖掘装置实质上是一组平面连杆机构,其结构特点是各部件均采用铰销连接,通过液压缸的伸缩运动来完成挖掘过程的各种作业动作。
如图2所示,动臂CBF 下铰点C 与车架铰接,由动臂液压缸1L 支撑并改变动臂倾角,使动臂绕下铰点C 转动,达到动臂的升或降。
新型+CH-16机芯产品技术培训

CH-16机芯后缀名F47的产品:PF21300H(F47)、PF21366H(F47)、PF21399H(F47)、PF21800H(F47)主芯片TDA11105PS,掩膜后软件版本为CH05T1644 ,它不能与长虹CH-16机芯的其它芯片替换。
该机芯与以往CH-16机芯的相同点:控制系统、关机消亮、图像处理方式、行场振荡工作方式相同。
如行保护与EHT检测脚有关等。
不同处在于:图像处理供电采用5V.RGB处理不需要黑电流检测。
视放电压采用三极管即可。
代表产品前面板功能设置介绍整机后置功能遥控器按键介绍整机使用注意事项(音量)电视机出现无图故障时,请用户检查电视机工作状态,听听有无声音,判定电视机状态是否在单独听状态,后确认电视机是否出了故障。
智能音量控制的好处:虽信号有调制差异,但因IC内设置了此电路,均可实现理想的音量效果,无需人为调整。
整机使用注意事项(智能锁)整机使用注意事项(智能锁)此机具有智能锁功能,调谐锁、AV锁、音量锁、节目锁、限时收看等。
常因用户记不住密码,要求上门处理故障的问题,故我们要掌握解锁方便,记住此机最高密码,解决用户使用不当引起的的故障。
此机最高密码是8888。
智能锁最高密码是6688.整机其它功能还具有日历、节目排序、睡眠关机外产品规格由说明书给的规格表明了电视机所具有的功能,产品具有何种功能以此为准,产品功能是否合乎要求也以此为准。
CRT大小,这里给出的是有效大小(指能看见部分)技术后缀在说明书的位置其它产品方式一样CH-16机芯整机信号处理框图空白存贮可用中放相关中放相关行振荡相关硬件电路控制部分AV1音视频DVD调谐器电路TAF5-C4I21或TAF6-C2I21或TAV5-C4I21。
AGC来自UOC 9脚,静态电压由R011、R012决定。
中放及相关电路1、检修要点:涉及引脚:4脚PLL、9脚AGC、12、13脚IF输入等。
2、故障判定:送入AV信号便可确认故障产生部位。
(NEW)邱宣怀《机械设计》(第4版)配套题库【名校考研真题+章节题库+模拟试题】
第2章 机械零件的工作能力和计算准则 一、填空题
1.若一零件的应力循环特性, , N/mm2,此时 为 ( ), 为( ), 为( )。[中南大学2000研] 【答案】210N/mm2;280N/mm2;140N/mm2 【解析】根据题意可得
解得:
N/mm2;
N/mm2
则平均应力:
。
2.支承定轴线齿轮传动的转轴,轴横截面上某点的弯曲应力循环特性r =______;而其扭转应力的循环特性r=______。[国防科技大学2001研]
第1篇 总 论
第1章 机械设计概论
一、填空题
机械设计中所谓的失效是指______,常见的失效形式有______、 ______、______等。[北京航空航天大学2001研]
【答案】在设计预定的期间内,并在规定的条件下,不能完成正常的功 能;整体断裂;零件的表面破坏;过大的残余变形
【解析】机械零件的失效形式主要有:整体断裂、过大的残余变形、零 件的表面破坏、破坏正常工作条件引起的失效。
3.由原动机标牌功率计算出来的载荷为计算机载荷也叫名义载荷。 ( )[上海大学2006研]
【答案】错
【解析】由原动机标牌功率计算出来的载荷称为理论载荷或名义载荷。
4.增大零件的截面尺寸只能提高零件的强度不能提高零件的刚度。 ( )[上海大学2006研] 【答案】错 【解析】零件截面尺寸的增大不仅能够提高零件的强度,同时也提高了 零件的刚度。 5.进行机械零件强度计算时,所用的载荷是指载荷系数与名义载荷的 乘积。( )[西安交通大学2007研] 【答案】对
3.变应力可由______产生,变应力特性可用______等五个参数中的任 意两个来描述。[北京航空航天大学2001研]
【答案】静载荷;最大应力、最小应力、平均应力、应力幅、应力循环 特性
大专本科分析化学第十六章质谱法
3.快原子轰击源
(fast atom bombardment ionization source,FAB)
• 气体在电离室依靠放电产生离子,高能氩离子经电荷交 换得到高能氩原子流,氩原子打在样品上产生样品离子。 样品置于涂有底物(如甘油)的靶上。靶材为铜,原子 氩打在样品上使其电离后进入真空,并在电场作用下进
离子阱质量分析器
离子阱由一环形电极 上下各一端罩电极构成
• 以端罩电极接地,在环电极上施以变化的射频电压,此时
处于阱中具有合适的m/z的离子将在环中指定的轨道上稳
定旋转,若增加该电压,则较重离子转至指定稳定轨道, 而轻些的离子将偏出轨道并与环电极发生碰撞。当电离源 产生的离子由上端小孔进入阱中后,射频电压开始扫描, 陷入阱中离子的轨道则会依次发生变化而从底端离开环电 极腔,从而被检测器检测。
入分析器。
质量分析器
+
+
原子束 + + + 快原子枪 样品靶 二次离子束
快原子轰击质谱示意图
FAB工作原理
FAቤተ መጻሕፍቲ ባይዱ源的优缺点 • 优点:
(1)广泛应用的软电离技术,易得到较强的分子离子或准 分子离子,由此获得化合物分子量的信息。
(2)在离子化过程中样品无需加热汽化,离子化能力强,
对强极性、 难汽化的化合物也能电离,故适合于热 不稳定、强极性分子、生物分子及配合物的分析。
状和能量的离子束进入质量分析器。
电离模式 • 硬电离方法:能给样品较大能量的电离方法。
• 软电离方法:给样品较小能量的电离方法,适用于易破
裂或易电离的样品。
1.电子轰击源(electron impact source,EI)
组成
锦16化学驱三层系整体调驱设计
锦16化学驱三层系整体调驱设计锦16油田是一个非常特殊的油田,位于中国东北地区。
它是一个复杂的油藏,由五个层位组成,其中三个层位是化学驱油层。
在过去的几年里,该油田的产量有所下降,因此需要进行整体调驱设计,以提高油田的产能。
整体调驱设计是指利用不同的驱替剂和工艺,通过改变油藏内部的物理和化学条件,以提高驱替效果,从而增加油田的产能。
在锦16油田的整体调驱设计中,需要考虑以下几个方面。
需要选择合适的驱替剂。
在锦16油田的化学驱三层系中,常用的驱替剂有聚合物、表面活性剂和丙烯酸盐。
这些驱替剂可以降低油水界面张力,增加驱油剂在油层中的分布,提高驱替效果。
需要优化驱替工艺。
驱替工艺主要包括注驱工艺和吸气工艺。
在注驱工艺中,需要合理控制注入压力和注入速度,以保证驱替剂能够充分进入油层,同时避免油井堵塞。
在吸气工艺中,需要选择合适的吸气剂,以增加油井的吸气能力。
还需要考虑油藏物理和化学条件对驱替效果的影响。
锦16油田的油藏是一个复杂的油藏,需要对渗透率、孔隙度、饱和度等参数进行详细的分析,以确定合适的驱替方案。
还需要考虑油藏的温度、酸碱度等化学条件对驱替效果的影响,以优化驱替剂的配比和使用条件。
还需要进行实验验证和数值模拟。
实验验证可以通过实验室模拟油藏条件,进行注驱和吸气实验,以评估不同驱替剂和工艺的效果。
数值模拟可以根据油藏的物理和化学参数,建立数学模型,模拟驱替过程,并预测驱替效果。
锦16油田的整体调驱设计是一个复杂而繁琐的工作,需要考虑多个因素,并进行实验验证和数值模拟。
通过合理的驱替剂选择和工艺优化,可以提高油田的产能,实现经济效益最大化。
第十六章 氨基酸
中性氨基酸的等电点小于 7 ,一般在 5.0 ~ 6.5 之间。酸性 氨基酸的等电点在 3 左右。碱性氨基酸的等电点都在 7.5 ~ 10.8 之间。
利用氨基酸等电点的性质,可以用电泳方法分离氨基酸。
当电泳池的缓冲溶液pH=6.02时,丙氨酸(Ala,pI=6.02)、精 氨酸(Arg,pI=10.76) 、天冬氨酸(Asp,pI=2.98)存在的主要结构如 下:
Ile
I
二、营养必需氨基酸
20多种α-氨基酸中,有八种是人体所需要的必需氨基酸 (essential amino acid)(即人体本身不能合成的氨基酸)。它 们是:
缬氨酸、亮氨酸、异亮氨酸、苏氨酸、 蛋氨酸、赖氨酸、苯丙氨酸、色氨酸。 三、修饰氨基酸和非蛋白质氨基酸
有些氨基酸经酶催化修饰,生成一些修饰氨基酸(modified amino acid),其在生物体内没有相应的密码子,如胱氨酸、羟 脯氨酸等。还有一些β-氨基酸、γ-氨基酸、δ-氨基酸,有些是D型的,以游离或结合形式分布于植物、动物和细菌内,称为非蛋 白质氨基酸如鸟氨酸、瓜氨酸等(具体见教材285页)。
四、氨基酸的性质
物理性质
组成蛋白质的氨基酸都是晶体。除甘氨酸外,其它氨 基酸都为手性分子,所以均具有旋光性。由于氨基酸具有 内盐的性质,偶极离子的极性大,它们分子间作用力的结 果,导致氨基酸的熔点较高,一般都在200 ~ 300℃ 之间。 大多数氨基酸受热易分解放出二氧化碳。 α- 氨基酸多难溶 于有机溶剂,而易溶于强酸和强碱等极性溶剂中。
§3
蛋白质
【本章重点】 氨基酸的结构;化学性质——酸碱性和等电点。 【必须掌握的内容】 1. 氨基酸的结构和命名。 2.氨基酸的化学性质—等电点、Van Slyke氨基氮测 定法、显色反应。
仿真软驱设计方案CH的
基于CH375的仿真软驱设计摘要介绍仿真软驱的设计方案。
本文采用MCU和USB接口芯片CH375作为仿真软驱的核心部分,实现软驱接口逻辑控制和对U盘的数据存取,取代了存储量小、使用寿命短的软驱和软盘,为将软驱作为唯一数据录入工具的设备如绣花机等工控设备提供了方便,降低了使用成本。
关键词仿真软驱USB接口CH375 U盘软驱绣花机引言近年来,随着USB(Universal Serial Bus>技术的不断发展,特别是存储工具U 盘的普及,软驱软盘因其存储量小、质量差、易损坏等致命弱点正逐步被淘汰。
然而目前还有不少几十万、上百万的将软驱/磁碟作为主要或唯一的数据录入工具的工业数控设备正在高速运行,绣花机就是其中一个典型的例子,它需要经常进行花样存取频繁使用软驱软盘,能够直接读取U盘或通过网络系统传输成为今后延续其生命力的最有效的手段,这就凾待一种全新的可以取代软驱的设备出现。
仿真软驱设计构想由此产生。
目前,USB接口设计的方案大致有两种类型:一种是采用MCU和USB接口芯片分离结构,此方案的特点是成本和开发难度较低。
另一种方案是采用嵌入式结构,即采用带USB接口的MCU或内嵌MCU的USB芯片,此方案的特点是成本高,不适用于简单和低成本的开发。
我们的目的是开发一种经济实用的可以取代软驱的设备,故采取第一种方案。
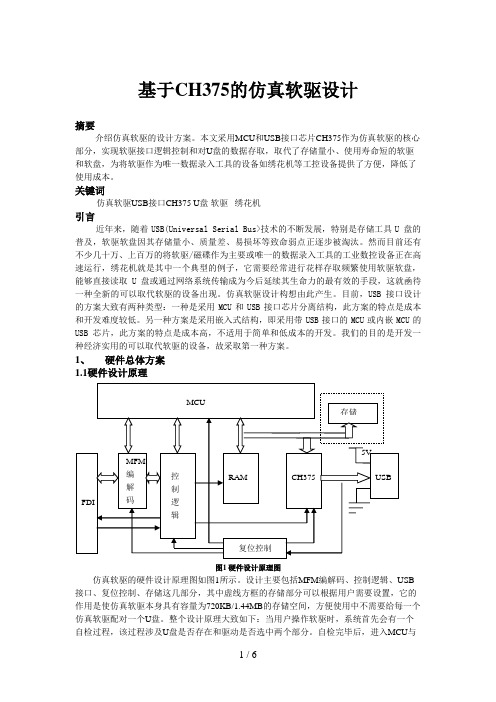
1、硬件总体方案1.1硬件设计原理图1 硬件设计原理图仿真软驱的硬件设计原理图如图1所示。
设计主要包括MFM编解码、控制逻辑、USB 接口、复位控制、存储这几部分,其中虚线方框的存储部分可以根据用户需要设置,它的作用是使仿真软驱本身具有容量为720KB/1.44MB的存储空间,方便使用中不需要给每一个仿真软驱配对一个U盘。
整个设计原理大致如下:当用户操作软驱时,系统首先会有一个自检过程,该过程涉及U盘是否存在和驱动是否选中两个部分。
自检完毕后,进入MCU与FDI的数据交换阶段,该阶段中首先FDI测试虚拟马达和磁头工作状态,在收到控制逻辑返回的就绪状态后,FDI将数据以MFM编码格式发送,数据经过MFM解码后通过控制逻辑实现与MCU的数据交互。
第十六章质谱法
(l)电子轰击源 ( EI ) 在离子源内,用电加热铼或钨的灯丝到2000°C,产生高 速、高能电子束,当高速电子束流向阳极时,与试样分子发生 碰撞,导致试样分子发生电离,即 M+e → M++2e 式中M为待测分子,M+为分子离子或母体离子。 电子束产生各种能态的M+。若产生的分子离子带有较大的内能 (转动能、振动能和电子跃迁能),分子离子或母体离子继续 受电子轰击而发生化学键的断裂,形成大量的各种低质量数的 碎片正离子和中性自由基,这些碎片离子可用于有机化合物的 结构鉴定。如 M+1 → M+3 M+ …… M+2 → M+4 式中M+1,M+2…为较低质量的离子
(2)化学电离源( CI )
在质谱中可以获得样品的重要信息之一是其相对分子 质量。但经电子轰击产生的M+峰,往往不存在或其强度很 低。必须采用比较温和的电离方法,其中之一就是化学电 离法。化学电离法是通过离子一分子反应来进行,而不是 用强电子束进行电离。离子(为区别于其他离子,称为试 剂离子)与试样分子按下列方式进行反应,转移一个质子 给试样或由试样移去一个 H+或电子,试样则变成带 +l电荷 的离子。 化学电离源一般在 1.3×102~1.3×103Pa压强下工作(现已 发展出大气压下化学电离技术),其中充满 CH4,首先用 高能电子进行电离产生CH5+和C2H5+,即
1.真空系统 质谱仪的离子产生及经过系统必须处于高真空状态(离 子源真空度应达10-3~10-5Pa,质量分析器中应达10-6Pa)。 若真空度过低,则会造成离子源灯丝损坏、本底增高、反应 过多,从而使图谱复杂化、干扰离子源的正常调节、引起加 速极放电等问题。一般质谱仪都采用机械泵预抽真空后,再 用高效率扩散泵连续地运行以保持真空。现代质谱仪采用分 子泵可获得更高的真空度。
北大微观经济学课件ch16Equilibrium

供给增加
价格下降,数量增加。
3
需求减少
价格下降,数量减少。
Partial Equilibrium A nalysis(偏微观 经济分析)
偏微观经济分析关注单个市场的均衡和效率。基于特定假设,分析供求之间的关系和对市场的影 响。
1 假设1:替代品
假设商品之间没有替代关系。
2 假设2:居民收入不变
假设居民收入在分析期间内保持不变。
3 假设3:其他因素不变
假设其他影响供求的因素不变。
General Equilibrium Analysis(一般均衡分 析)
一般均衡分析研究了多个市场之间的相互依赖关系。考虑不同市场之间的影响和调整过程。
Interdependence of Markets(市场相互依存)
静态均衡(Static Equilibrium)
市场供求达到平衡,价格和数量保持不变。
动态均衡(D ynamic Equilibrium)
市场在长期内逐步调整,供求会发生变化。
市场均衡(Market Equilibrium)
市场上买卖的价格和数量达到了一种稳定的状态。
D emand and Sup ply(需求和供给)
降。
3
需求增加(Increase in D emand )
需求曲线向右移动,导致价格和数量上 升。
供给增加(Increase in Supp ly)
供给曲线向右移动,导致价格下降,数 量上升。
Changes in Equilibrium(均衡的变化)
需求和供给变化会导致均衡点的变化。价格和数量会调整,以达到新的均衡状态。
北大微观经济学课件 ch16Equilibrium
欢迎来到北大微观经济学课件ch16Equilibrium,让我们探索市场均衡和效率的 奥秘。
嵌入式系统设计 -Ch16_内部整合电路声音控制器I2S
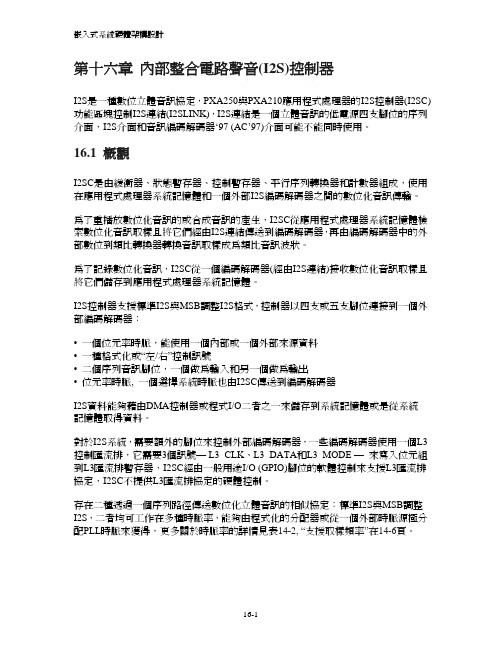
第十六章內部整合電路聲音(I2S)控制器I2S是一種數位立體音訊協定,PXA250與PXA210應用程式處理器的I2S控制器(I2SC)功能區塊控制I2S連結(I2SLINK),I2S連結是一個立體音訊的低電源四支腳位的序列介面,I2S介面和音訊編碼解碼器‘97 (AC’97)介面可能不能同時使用。
16.1 概觀I2SC是由緩衝器、狀態暫存器、控制暫存器、平行序列轉換器和計數器組成,使用在應用程式處理器系統記憶體和一個外部I2S編碼解碼器之間的數位化音訊傳輸。
為了重播放數位化音訊的或合成音訊的產生,I2SC從應用程式處理器系統記憶體檢索數位化音訊取樣且將它們經由I2S連結傳送到編碼解碼器,再由編碼解碼器中的外部數位到類比轉換器轉換音訊取樣成為類比音訊波狀。
為了記錄數位化音訊,I2SC從一個編碼解碼器(經由I2S連結)接收數位化音訊取樣且將它們儲存到應用程式處理器系統記憶體。
I2S控制器支援標準I2S與MSB調整I2S格式,控制器以四支或五支腳位連接到一個外部編碼解碼器:• 一個位元率時脈,能使用一個內部或一個外部來源資料• 一種格式化或“左/右”控制訊號• 二個序列音訊腳位,一個做為輸入和另一個做為輸出• 位元率時脈, 一個選擇系統時脈也由I2SC傳送到編碼解碼器I2S資料能夠藉由DMA控制器或程式I/O二者之一來儲存到系統記憶體或是從系統記憶體取得資料。
對於I2S系統,需要額外的腳位來控制外部編碼解碼器,一些編碼解碼器使用一個L3控制匯流排,它需要3個訊號— L3_CLK、L3_DATA和L3_MODE — 來寫入位元組到L3匯流排暫存器,I2SC經由一般用途I/O (GPIO)腳位的軟體控制來支援L3匯流排協定,I2SC不提供L3匯流排協定的硬體控制。
存在二種透過一個序列路徑傳送數位化立體音訊的相似協定:標準I2S與MSB調整I2S,二者均可工作在多種時脈率,能夠由程式化的分配器或從一個外部時脈源極分配PLL時脈來獲得,更多關於時脈率的詳情見表14-2, “支援取樣頻率”在14-6頁。
CH-16机芯采用STR-F6656集成开关电源的原理分析及检修

CH-16机芯采用STR-F6656集成开关电源的原理分析及检修【摘要】本文通过对长虹CH-16机芯系列中使用STR-F6656集成块为核心的开关电源工作原理的分析,剖析该集成内部的启动电路、驱动电路、振荡电路、开关调整管、过压保护等电路的工作原理、工作过程及其之间的内在联系.并根据电路原理,应用常规分析方法对几个常见故障进行分析检修。
【关键词】CH-16机芯开关电源原理检修STR-F6656长虹CH-16机芯的开关稳压电源电路原理图如图所示,它是变压器耦合并联型开关稳压电源,该系列集成电路组成的开关电源电压适应范围宽,能在150V~260V交流电压范围内正常工作,输出功率大。
该开关电源设计有过流、过压、过热保护电路,一旦开关电源稳压中的取样放大电路出现故障或者负载过重,设计在该集成内部的过流、过压电路便会立即启动进入保护状态,有效的避免故障范围扩大。
另外CH-16系列电源具有两种工作状态:待机和正常工作状态。
1CH-16机芯系列彩色电视机开关电源的原理图一以及组成框图二所示,可以把其大体分成8个功能模块来分析其工作原理与具体应用:1.1进线滤波器(T801),其作用有两个:1.对电网进入的干扰信号进行抑制;2.防止开关电源振荡电路高频脉冲信号通过电网对其他电器设备造成干扰。
按原理分析,只有出现干扰或保险丝熔断才检查该电路。
1.2交流220V整流滤波电路(VD801A~VD804A,C810),把交流220V电压转化成约300伏的直流电压,经变压器绕组加到STR-F6656的3脚;其中R801的作用是为了避免电容C801的容量过大,导致开关电源接通时候电流过大,可能会造成整流管损坏、熔丝断的故障。
1.3开关电源振荡电路,通过对原理图二的分析可知,该部分电路主要由N801的4脚外接元件和该集成电路内部相关电路组成。
该电路中4脚为振荡电路供电电压端。
振荡电路供电部分由VD802A、VD803A、C812、C813、R802、V801、VD808、C814、VD804、R808和T830的7~5脚的绕组组成。
CH-16机芯采用STR-F6656集成开关电源的原理分析及检修
CH-16机芯采用STR-F6656集成开关电源的原理分析及检修【摘要】本文通过对长虹CH-16机芯系列中使用STR-F6656集成块为核心的开关电源工作原理的分析,剖析该集成内部的启动电路、驱动电路、振荡电路、开关调整管、过压保护等电路的工作原理、工作过程及其之间的内在联系.并根据电路原理,应用常规分析方法对几个常见故障进行分析检修。
【关键词】CH-16机芯开关电源原理检修STR-F6656长虹CH-16机芯的开关稳压电源电路原理图如图所示,它是变压器耦合并联型开关稳压电源,该系列集成电路组成的开关电源电压适应范围宽,能在150V~260V交流电压范围内正常工作,输出功率大。
该开关电源设计有过流、过压、过热保护电路,一旦开关电源稳压中的取样放大电路出现故障或者负载过重,设计在该集成内部的过流、过压电路便会立即启动进入保护状态,有效的避免故障范围扩大。
另外CH-16系列电源具有两种工作状态:待机和正常工作状态。
1CH-16机芯系列彩色电视机开关电源的原理图一以及组成框图二所示,可以把其大体分成8个功能模块来分析其工作原理与具体应用:1.1进线滤波器(T801),其作用有两个:1.对电网进入的干扰信号进行抑制;2.防止开关电源振荡电路高频脉冲信号通过电网对其他电器设备造成干扰。
按原理分析,只有出现干扰或保险丝熔断才检查该电路。
1.2交流220V整流滤波电路(VD801A~VD804A,C810),把交流220V电压转化成约300伏的直流电压,经变压器绕组加到STR-F6656的3脚;其中R801的作用是为了避免电容C801的容量过大,导致开关电源接通时候电流过大,可能会造成整流管损坏、熔丝断的故障。
1.3开关电源振荡电路,通过对原理图二的分析可知,该部分电路主要由N801的4脚外接元件和该集成电路内部相关电路组成。
该电路中4脚为振荡电路供电电压端。
振荡电路供电部分由VD802A、VD803A、C812、C813、R802、V801、VD808、C814、VD804、R808和T830的7~5脚的绕组组成。
新型CH-16 CH05T1644 TDA11105PS PF21300H(F47)电路图等资料

CH-16机芯后缀名F47的产品:PF21300H(F47)、PF21366H(F47)、PF21399H(F47)、PF21800H(F47)主芯片TDA11105PS,掩膜后软件版本为CH05T1644 ,它不能与长虹CH-16机芯的其它芯片替换。
该机芯与以往CH-16机芯的相同点:控制系统、关机消亮、图像处理方式、行场振荡工作方式相同。
如行保护与EHT检测脚有关等。
不同处在于:图像处理供电采用5V.RGB处理不需要黑电流检测。
视放电压采用三极管即可。
代表产品前面板功能设置介绍整机后置功能遥控器按键介绍整机使用注意事项(音量)电视机出现无图故障时,请用户检查电视机工作状态,听听有无声音,判定电视机状态是否在单独听状态,后确认电视机是否出了故障。
智能音量控制的好处:虽信号有调制差异,但因IC内设置了此电路,均可实现理想的音量效果,无需人为调整。
整机使用注意事项(智能锁)整机使用注意事项(智能锁)此机具有智能锁功能,调谐锁、AV锁、音量锁、节目锁、限时收看等。
常因用户记不住密码,要求上门处理故障的问题,故我们要掌握解锁方便,记住此机最高密码,解决用户使用不当引起的的故障。
此机最高密码是8888。
智能锁最高密码是6688.整机其它功能还具有日历、节目排序、睡眠关机外产品规格由说明书给的规格表明了电视机所具有的功能,产品具有何种功能以此为准,产品功能是否合乎要求也以此为准。
CRT大小,这里给出的是有效大小(指能看见部分)技术后缀在说明书的位置其它产品方式一样CH-16机芯整机信号处理框图空白存贮可用中放相关中放相关行振荡相关硬件电路控制部分AV1音视频DVD调谐器电路TAF5-C4I21或TAF6-C2I21或TAV5-C4I21。
AGC来自UOC 9脚,静态电压由R011、R012决定。
中放及相关电路1、检修要点:涉及引脚:4脚PLL、9脚AGC、12、13脚IF输入等。
2、故障判定:送入AV信号便可确认故障产生部位。
锦16化学驱三层系整体调驱设计
锦16化学驱三层系整体调驱设计
锦16层油田是一个位于中国东北部的重要油田,由于其良好的储量和产量,已成为国内领先的油田之一。
随着开采时间的延长,油田产能逐渐下降,井底压力不足以将原油顶出地层,导致采油率下降。
为了提高采油率和延长油田的生产寿命,需要进行整体调驱设计。
整体调驱设计是指通过调整油藏中原有的物理和化学性质,改变原有的流体分布和浸润状态,以提高采油效果和延长油田的生产寿命。
在锦16层油田的整体调驱设计中,化学驱是一种常用的调驱方法。
化学驱指的是通过注入化学药剂改变油藏中的浸润和流动性质,从而增加原油的采收率。
在锦16层油田的化学驱调驱设计中,主要采用聚合物驱和表面活性剂驱。
聚合物驱是一种通过注入聚合物溶液改变油藏中水和油的相互作用力和相对渗透性的方法。
聚合物的注入可以增加水相油藏之间的黏度差,从而改变油藏中的相对渗透性,提高水驱效果。
聚合物对油藏表面具有一定的吸附能力,可以提高原油的采收率,并减少水相流体的排水能力。
在锦16层油田的化学驱调驱设计中,需要根据油藏的特征和实际情况确定合适的驱替剂配方和注入参数。
一般来说,聚合物驱和表面活性剂驱可以相互配合,以达到最佳的调驱效果。
为了保证化学药剂的注入和驱替效果,还需要考虑注入工艺、压力管理和人工监测等方面的因素。
Chp16第十六章组织强盛

3.目的管理(guǎnlǐ)有何特征?新创企业采用目的管 理(guǎnlǐ)有何需求留意的环节?
4.结合中国状况,谈谈你以为新创企业中止文明树 立时有何特定要求?
2021/11/10
第十五页,共15页。
吉林大学(jílín dàxué)商
〞
2021/11/10
第十二页,共15页。
吉林大学(jílín dàxué)商
二、优秀企业家的四种(sì zhǒnɡ) 肉体
(一)使命(shǐmìng)必达 (二)热爱客户和产品 (三)快速创新 (四)自我鼓舞
2021/11/10
第十三页,共15页。
吉林大学(jílín dàxué)商
三、企业生长中的文明(wénmíng)管 理
(一)尝试授权,完成摆脱 (二)完善(wánshàn)组织架构,以利规范
决策 (三)树立坚定的鼓舞机制来凝聚员工
2021/11/10
第八页,共15页。
吉林大学(jílín dàxué)商
第三节 目的(mùdì)管理
一、目的管理的原那么 (一)企业必需具有分歧的目的 (二)主要目的也许只需一个(yī ɡè) (三)自我控制
第一节 制度(zhìdù)管理
一、企业管理四阶实践 企业的管理水平普通可以分为(fēn wéi)
四个层次: (一)随意、觉得管理型企业 (二)普通制度管理型企业 (三)规范化、信息化管理型企业 (四)优秀企业文明导向型企业
2021/11/10
第三页,共15页。
吉林大学(jílín dàxué)商
二、公司(ɡōnɡ sī)健忘症
(一)轻度患者:要记得和〝锅炉工人 (gōng rén)〞恳谈
机械设计课程设计ZDL-16
机械设计课程设计ZDL-16一、课程目标知识目标:1. 掌握ZDL-16机械设计的基本原理和设计流程;2. 理解并运用机械设计中的力学、材料力学、机械制图等相关知识;3. 掌握ZDL-16机械结构中各部件的功能、工作原理及相互关系;4. 了解并应用机械设计中的公差配合、精度控制等工程标准。
技能目标:1. 能够运用CAD软件绘制ZDL-16机械设计图纸;2. 学会使用相关计算工具进行机械设计参数的计算和优化;3. 培养实际操作能力,能够组装、调试ZDL-16机械装置;4. 提高团队协作和沟通能力,能够参与项目设计并进行有效讨论。
情感态度价值观目标:1. 培养学生对机械设计的兴趣,激发创新意识;2. 培养学生的工程意识,认识到机械设计在国民经济和社会发展中的重要性;3. 树立正确的价值观,明白机械设计应遵循安全、可靠、经济、环保等原则;4. 培养学生严谨、细致、负责的工作态度,为将来从事相关工作奠定基础。
本课程针对高年级学生,结合学科特点,注重理论与实践相结合,提高学生的实际操作能力和创新能力。
通过本课程的学习,使学生能够掌握ZDL-16机械设计的基本知识和技能,为将来从事机械设计及相关工作打下坚实基础。
同时,培养学生良好的工程素养和职业素养,提高其综合素质。
二、教学内容1. 机械设计基本原理:讲解机械设计的基本概念、设计流程和原则,使学生了解机械设计的基本框架。
- 教材章节:第1章 机械设计概述- 内容:机械设计的基本概念、设计流程、设计原则2. 机械设计相关力学知识:回顾并巩固力学、材料力学等基础知识,为机械设计提供理论支持。
- 教材章节:第2章 力学基础- 内容:力学基本概念、材料力学性质、应力与应变、扭转剪切3. 机械制图与CAD软件应用:学习机械制图的基本知识和CAD软件操作,提高学生绘制机械图纸的能力。
- 教材章节:第3章 机械制图与CAD技术- 内容:制图基本知识、CAD软件操作、二维和三维图纸绘制4. ZDL-16机械结构设计:详细讲解ZDL-16机械结构中各部件的设计方法,使学生掌握具体设计步骤。
橡胶履带牵引车辆高速行走机构设计(由cad原图).doc
橡胶履带牵引车辆高速行走机构设计前言拖拉机是用于牵引和驱动各种配套机具,完成农业田间作业、各种土石方工程作业、运输作业和固定作业等的动力机械经过 100 多年的演变,拖拉机已成为一种世界的动力机械,并已由原始的牲畜动力替代者发展成为现代的多种用途机械装备:许多新结构、新科技的采用,大大扩展了现代拖拉机得到功用和效率。
拖拉机产品的发展历程已经表明,它在国民经济发展中有着重要的作用。
并已在农业、林业、工程建设、交通运输中广泛使用。
用拖拉机及其配套机具装备农业是进行农业技术改造的重要手段,也是实现农业现代化的重要保证。
拖拉机作为自走式动力机械,可以带动各种农机具完成田间耕作和固定作业,也可以带挂车完成道路与田间运输作业。
它已经成为广大农村发展农业生产、农村商品流通和提高劳动生产率必不可少的生产工具。
以工程作业为主的履带式拖拉机,可配带推土铲、松土器、铲运机、平地机等作业机具完成国民经济各种建设项目中的土石方施工作业,它们也有农业变型产品,在恶劣、繁重的田间作业条件下更能发挥其独特的作用。
以农业用为主的履带拖拉机,除可完成各种农田作业外,亦可发展工程用变型,如带推土铲、铲运机等作业机具,完成以土方作业为主的工程作业,在农田水利建设和土方为主的工程建设中发挥重要作用。
轮式和手扶拖拉机的工程变型也在发展中,并在农业工程、水利施工、机场港口作业、道路建设等方面发挥作用。
总之,世界各国都把拖拉机作为农业机械化和工程建设的重要装备,拖拉机的年产量和拥有量早已成为一个国家农业机械化水平和工程建设水平的重要标志之一。
本次设计有十名同学参与,由张文春老师和曹青梅老师指导,并参阅了大量的文献,资料。
在此一并谢过。
鉴于本人水平有限,书中难免有疏漏谬误之处,望读者批评,指正。
目录中文摘要英文摘要 (3) (4)第一章橡胶履行走系的体§1.1 橡胶履行走系型的 (5)§1.2 平衡台行走系的体 (6)第二章橡胶履§2.1 橡胶履的算 (8)第三章§3.1 的 (10)§3.2 的算 (11)第四章支重§4.1 支重的 (12)§4.2 支重的算 (13)第五章托§5.1 托的 (14)第六章和冲装置§6.1 和冲装置的 (15)§6.2 和冲装置的算 (16)第 7 章⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯17 参考文献⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯18 附⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯19 致⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯20 外文料翻⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯21摘要拖拉机行业发展至今,新产品层出不穷,然而要想设计一类成功的机型也不是运用新技术越多越好,而要考虑自身的生产能力,同类机型的参数,市场的饱和程度等等多方面的因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
写 保 护
盘 片 到 位
盘 片 密 度
18
工作状态检测
1) 00磁道传感器:一个红外发射-接收对管,当磁头 移动到00号磁道,也就是最外面的磁道时,磁头小车 上的挡板遮断光电对管的光路,输出到达00号磁道的 信号。 2) 写保护传感器:一个微动开关,如果盘套上的拨块 被拨到写保护位置,此微动开关不被压下。 3) 磁盘到位传感器:一个微动开关,每当盘片被推到 底时,上夹板下降,此开关就被盘套压下,发出盘片 已到位的信号。 4) 磁盘密度传感器:一个微动开关,高密度磁盘的盘 套上有一个方孔,磁盘到位时不会压下此开关,而低 密度磁盘的盘套上没有方孔,磁盘到位时此开关被压 下,由此区分盘片的密度。
ID标记
地址标记 扇段标记段 数据区
GAP1:索引间隙,32~146字节,写入4EH,表示本磁道起始; GAP2:标志符间隙,78~84字节,写入4EH,将本扇段内标记段与数据段隔开; GAP3:数据区间隙,22字节,写入4EH; GAP4:磁道间隙,4EH,本磁道最后一个扇段的GAP3后,直到另一个磁道的GAP1出现为止; SYNC:同步信号,12字节,写入00H,供读数据时磁头定位,读出后分离出数据
8
磁头小车的运动
丝杠和导轴构成一个平面,保证小车的平稳运动。 丝杠由步进电机带动,步进电机在控制器发出的 步进脉冲和方向信号控制下转过预定的角位移, 通过丝杠—螺母副转换为磁头小车的直线运动, 使磁头找到预定的磁道。
当磁头移动到位于最外圈的00号磁道时,小车上 的档片就会遮挡光电对管的光路,这个光电对管 作为00磁道传感器,立即向控制器发出信号,表 示磁头已到00号磁道。
16
读写操作
扇段的定位
同步信号SYNC确保了写在任何一个扇段里的标志、地
址和数据总能在读操作中被磁头正确地对准。读取到 的信号在专门的分离电路中将数据分离出来,然后送 往数据总线。
磁道的定位
寻找磁道的操作由控制器根据来自主机的命令和目标
磁道号,将当前磁道号与目标磁道号比较,从而决定 磁头的移动方向和位移量。
17
控制器的作用
控制电路要按规定的格式对盘片做格式化,按规定的 格式写或读信息。为此,要解释来自CPU的命令,检 测驱动器的工作状态,向磁头系统和主轴系统发出各 时钟 种控制信号。 与
数据总线
同步控制 写预补偿
读数据 写数据
磁 头 数据分离
读数据
缓 冲 器
控制电路
步进脉冲 00磁道 INTR 索引脉冲 步进 电机
GAP1 扇区00 扇区17 扇区01 磁头径向 直线运动 GAP4
磁道00 磁道79 盘片 转动 磁道i 扇区j
5
软磁盘的读取
磁盘
磁盘旋转, 形成相对高 速运动
铁磁薄膜介质, 磁化方向表示 0、 1
磁头的电磁 感应线圈
6
16.1 磁头系统
磁头系统主要包括磁头小车、导轴、丝杠螺母副 和步进电机,此外,还有00号磁道检测传感器。
(b) 侧面
上夹板
21
16.6 盘片和盘套
盘片是76μm厚的聚酯薄膜,两面涂敷1~3μm厚的磁 性材料,可以读写106次。 格式化后,18个扇区(00~17),80个磁道(00~79), 2个面,每个扇段存储512B数据,整个3.5in软磁盘的 存储量为 512×18×80×2=1474560字节 或 1474560/1024=1440KB 盘片中部是钢制的盘毂,盘毂上有定位孔和驱动孔。 这种驱动定位紧固方式可避免盘片打滑或错位,提高 了盘片定位精度。 盘套上有写保护拨块、表示高密度的方孔和两个定位 用的凹坑。为防止静电,盘套内衬有防静电的无纺布 或纸。
15
磁道格式
索引脉冲 盘片旋转一周扫过一个完整磁道 (300 rpm)
索引脉冲
扇段00 标 志 区 数 据 区 标 志 区
扇段01 数 据 区 标 志 区
扇段17 数 据 区
GAP1
GAP2
GAP3
GAP2
GAP3
GAP2
GAP3
DATA 512 字节 MFM方式记录
SYNC
SYNC
GAP2
GAP4 GAP3
步进 电机* 轴承 光电对管 00磁道 检测器 盘片主水 平定位销 和下夹板 导槽 导轴 轴承
结构主板: 装配模块 磁头 小车
步进 电机
导轴 弹簧 钢片 丝杠* 活门拨杆 及下夹板 止弹器 针形 螺母
轴承
00磁道 存储单元 上磁头
上磁头 盘套次水 平定位销 和下夹板 导槽 主轴* 转子 漏磁 窗口 柔性 驱动销* 上夹板 升降槽
作用:系统的装配模块,为所 有的静态零部件和动态机构提 供了定位基准和运动参照。 构成: 1)控制电路印制板;检测写保 护、盘密度和盘片到位位传 感器;00号磁道传感器。 2)磁头系统的导轴和丝杠固定 在主板上,两个轴的加工精 度和装配平行度直接影响磁 头的运动精度;主轴电机也 固定在软驱主板上,它的轴 心定位精度对读写操作有最 为重要的作用。 3)上、下夹板,盘套活门拨杆 底转动轴和复位弹簧也固定 在主板底面上。 4)盘片的主、次两个水平驱动 销 5)上下盖、前面板
14
磁道格式
读写操作的实质是要保证磁头准确找到预定的磁道和 扇段。为了达到此目的,设计了磁盘的磁道格式。新 盘片首先必须按照设计的格式进行格式化。 在01号扇区前安排着间隙信号GAP1,17号扇区后面 是间隙信号GAP4。GAP1和GAP4之间顺序安排着本 磁道的18个扇段。当索引脉冲到来,首先遇到表示磁 道首部的间隙GAP1,而磁道尾部的间隙GAP4之后就 是下一个索引脉冲。 每一个扇段内,分为ID标记段和数据区两部分。ID标 记段以同步信号SYNC起始,以间隙GAP2结束。数 据区也以同步信号SYNC起始,以间隙GAP3结束。
直流无刷电机
为了使转子角位移满360°时重新从0°计起,在永磁转子 外壳的边缘开了一个漏磁窗口,在转子外壳附近的定子印 制板上,安装了一个霍尔器件或者一个电感线圈,作为索 引传感器。 索引脉冲除用于划分磁道的起始和终止点外,还被利用来 作转速控制。 直流电源
PWM信号 控制 电路 驱动 电路 绕组换向 开关管电路 霍尔转 子位置 传感器 永磁转子 转子外壳 漏磁窗口 索引 传感器 定子 印制板 定子 绕组 专用集成电路芯片 转子位置信号(霍尔电势)
9
16.2 主轴系统
主轴系统的核心是主轴 电机,它是一个外形扁 平的直流无刷电机。 主轴电机转子轴心和定 子轴心决定了盘片旋转 运动的基准。读写操作 中,盘片以恒速 300r/min±1.5%作旋转 运动,也有的软驱转速 是600r/min。
霍尔 转子位置 传感器
永磁转子
转子外壳 漏磁窗口 索引 传感器
22
软磁盘的结构
磁盘 活门
次定位 凹坑
主定位凹坑
定位孔 盘毂 驱动孔
盘片 密度
写保护拨块
23
16.7 主要技术特性
以TEAC FD-55GER软盘驱动器为例。
接口:34芯工业标准接口。 外形尺寸(半高型):208 mm×146 mm×41mm (5.25in) 150 mm×102 mm×25.4 mm (3in) 重量: 1100g/425g 环境:工作温度: 5 ~ 45℃ 闲置温度: -22 ~ 60℃ 湿度: 10% ~ 90% 转速: 300 r/min 传输速率: 500 KB/s 电源1:+12V(±10%) 额定电流:0.12A,最大电流:1.0A,纹波:200 mVp-p 电源2:+5V(±5%) 额定电流:0.38A,最大电流:1.0A,纹波:100 mVp-p
2
软盘驱动器
3
软磁盘
软盘的存储容量
早期:5.25英寸
盘 1.2MB 现在:3.5英寸 盘 1.44MB
3.5 3.5英寸盘 英寸盘
5.25 5.25英寸盘 英寸盘
4
软磁盘的存储原理
软磁盘用硬磁性材料作介质,利用材料的剩磁表示信 息。3.5英寸软磁盘的盘片被划分为80个成同心圆的 磁道、18个扇区。一个磁道在某一扇区内的一段称为 扇段,每个扇段可以存储512字节的数据。除18个扇 段外,在扇段00和扇段17之间还设有间隙区。
下磁头
扇 00 区
17 扇 区
霍尔器 件或电 感线圈 索引 传感器 直流 无刷电机* 盘片* 写保护 盘片到位 传感器 传感器 下夹板 导槽 (a) 正面 (*表示读写操作要运动的部件)
定子 印制 电路 板
上夹板
上夹板: 磁盘进出导轨 抬起上磁头 磁盘弹出阻尼
直流无刷电机转子
定子
下夹板: 上夹板升降 盘片水平定位 盘片密度 传感器 盘片封套 弹出按键: 将下夹板推进
弹簧 钢片
弹簧 钢片
导轴
轴承
上磁头
下磁头 固定件
下夹板 复位拉簧 上夹板 升降槽 主板 磁性 托盘 柔性 驱动销
直流无刷电机转子
上夹板
盘套次水 平定位销 和下夹板 导槽
下夹板
定子 印制 电路 板
定子
上夹板
磁盘弹出按键: 将下夹板推进 盘套
20
16.5 主板
信号线、电源线 接插件
磁头小车*
印制电路板
压簧 光电对管 00磁道 检测器 步进 电机 上磁头支架 轴承 步进 电机 主板 导轴
轴承
下磁头
导轴和丝杠共同决定小车的直线运动轨迹,丝杠由步进电机带动。 (a) 正面 (b) 侧面
7
磁头小车
盘片是双面的,所以磁头小车上有上、下两个磁头,分别 安装在各自的支架上。上 磁头支架通过一片弹簧钢片固定在小车上。上磁头支架可 以由压簧将其下压,使上磁头与盘片的上表面保持良好接 触。 为使上磁头能抬起,上磁头支架上还有和两个小翼。上、 下磁头的通过扁平线束与控制电路连接。 小车的一侧有滑孔,导轴穿过滑孔后固定在主板上。小车 的另一侧有简化为一根钢针的螺母,与丝杠共同构成丝杠 -螺母副。与丝杠成运动副的螺母被简化为一根短钢针, 在很大程度上简化了装配。