八数码问题C语言A星算法详细实验报告含代码
A星算法求解八数码技术报告
A*算法求解八数码问题●open 表、closed 表数据结构的选择:1)把s放入open表,记f=h,令closed为空表。
2)重复下列过程,直到找到目标节点为止。
若open表为空表,则宣告失败。
3)选取open表中未设置过的具有最小f值的节点为最佳节点bestnode,并把它放入closed表。
4)若bestnode为一目标节点,则成功求得一解。
5)若bestnode不是目标节点,则扩展之,产生后继节点succssor。
6)对每个succssor进行下列过称:a)对每个succssor返回bestnode的指针。
b)计算g(suc)=g(bes)+k(bes,suc)。
c)如果succssore open,称此节点为old,并填到bestnode的后继节点表中。
d)比较新旧路劲代价。
如果g(suc)<g(old),则重新确定old的父辈节点为bestnode,记下较小代价g(old),并修真f(old)值。
e)若至old节点的代价较低或一样,则停止扩展节点。
f)若succssore不再closed表中,则看其是否在closed表中。
g)若succssore在closed表中,则转向(c)。
h)若succssore既不在open表中,又不在closed表中,则把它放入open表中,并添入bestnode后裔表中,然后转向(7)。
i)计算f值j)Go loop●节点的数据结构:static int target[9]={1,2,3,8,0,4,7,6,5}; 全局静态变量,表示目标状态class eight_num{private:int num[9]; 定义八数码的初始状态int not_in_position_num; 定义不在正确位置八数码的个数int deapth; 定义了搜索的深度int eva_function; 评价函数的值,每次选取最小的进行扩展public:eight_num* parent; 指向节点的父节点eight_num* leaf_next; 指向open表的下一个节点eight_num* leaf_pre; 指向open 表的前一个节点初始状态的构造函数eight_num(int init_num[9]);eight_num(int num1,int num2,int num3,int num4,int num5,int num6,int num7,int num8,int num9){}eight_num(void){ }计算启发函数g(n)的值void eight_num::cul_para(void){}显示当前节点的状态void eight_num::show(){}复制当前节点状态到一个另数组中void eight_num::get_numbers_to(int other_num[9]){}设置当前节点状态(欲设置的状态记录的other数组中)void eight_num::set_num(int other_num[9]){}eight_num& eight_num::operator=(eight_num& another_8num){} eight_num& eight_num::operator=(int other_num[9]){}int eight_num::operator==(eight_num& another_8num){}int eight_num::operator==(int other_num[9]){}空格向上移int move_up(int num[9]){}空格向下移int move_down(int num[9]){}空格向左移int move_left(int num[9]){}空格向右移int move_right(int num[9]){}判断可否解出int icansolve(int num[9],int target[9]){}判断有无重复int existed(int num[9],eight_num *where){}寻找估价函数最小的叶子节点eight_num* find_OK_leaf(eight_num* start){}}A*算法求解框图:●分析估价函数对搜索算法的影响:估价函数就是评价函数,它用来评价子结点的好坏,因为准确评价是不可能的,所以称为估值。
用A星算法解决八数码问题
A*算法解决八数码问题1 问题描述什么是八数码问题八数码游戏包括一个3×3的棋盘,棋盘上摆放着8个数字的棋子,留下一个空位。
与空位相邻的棋子可以滑动到空位中。
游戏的目的是要达到一个特定的目标状态。
标注的形式化如下:问题的搜索形式描述状态:状态描述了8个棋子和空位在棋盘的9个方格上的分布。
初始状态:任何状态都可以被指定为初始状态。
操作符:用来产生4个行动(上下左右移动)。
目标测试:用来检测状态是否能匹配上图的目标布局。
路径费用函数:每一步的费用为1,因此整个路径的费用是路径中的步数。
现在任意给定一个初始状态,要求找到一种搜索策略,用尽可能少的步数得到上图的目标状态。
解决方案介绍算法思想(估价函数是搜索特性的一种数学表示,是指从问题树根节点到达目标节点所要耗费的全部代价的一种估算,记为f(n)。
估价函数通常由两部分组成,其数学表达式为f(n)=g(n)+h(n)其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n 节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解)的条件,关键在于估价函数h(n)的选取。
估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
如果估价值>实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
搜索中利用启发式信息,对当前未扩展结点根据设定的估价函数值选取离目标最近的结点进行扩展,从而缩小搜索空间,更快的得到最优解,提高效率。
启发函数进一步考虑当前结点与目标结点的距离信息,令启发函数h ( n )为当前8个数字位与目标结点对应数字位距离和(不考虑中间路径),且对于目标状态有 h ( t ) = 0,对于结点m和n (n 是m的子结点)有h ( m ) – h ( n ) <= 1 = Cost ( m, n ) 满足单调限制条件。
数码问题C语言A星算法详细实验报告含代码
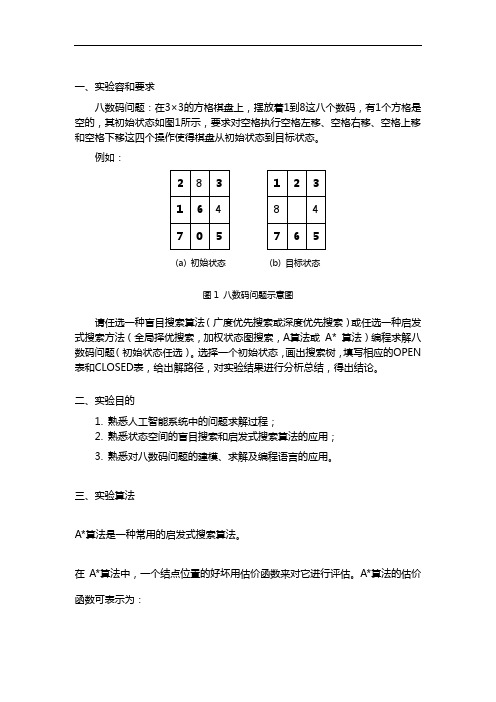
一、实验内容和要求八数码问题:在3×3的方格棋盘上,摆放着1到8这八个数码,有1个方格是空的,其初始状态如图1所示,要求对空格执行空格左移、空格右移、空格上移和空格下移这四个操作使得棋盘从初始状态到目标状态。
例如:图1 八数码问题示意图请任选一种盲目搜索算法(广度优先搜索或深度优先搜索)或任选一种启发式搜索方法(全局择优搜索,加权状态图搜索,A 算法或 A* 算法)编程求解八数码问题(初始状态任选)。
选择一个初始状态,画出搜索树,填写相应的OPEN 表和CLOSED表,给出解路径,对实验结果进行分析总结,得出结论。
二、实验目的1. 熟悉人工智能系统中的问题求解过程;2. 熟悉状态空间的盲目搜索和启发式搜索算法的应用;3. 熟悉对八数码问题的建模、求解及编程语言的应用。
三、实验算法A*算法是一种常用的启发式搜索算法。
在A*算法中,一个结点位置的好坏用估价函数来对它进行评估。
A*算法的估价函数可表示为:f'(n) = g'(n) + h'(n)这里,f'(n)是估价函数,g'(n)是起点到终点的最短路径值(也称为最小耗费或最小代价),h'(n)是n到目标的最短路经的启发值。
由于这个f'(n)其实是无法预先知道的,所以实际上使用的是下面的估价函数:f(n) = g(n) + h(n)其中g(n)是从初始结点到节点n的实际代价,h(n)是从结点n到目标结点的最佳路径的估计代价。
在这里主要是h(n)体现了搜索的启发信息,因为g(n)是已知的。
用f(n)作为f'(n)的近似,也就是用g(n)代替g'(n),h(n)代替h'(n)。
这样必须满足两个条件:(1)g(n)>=g'(n)(大多数情况下都是满足的,可以不用考虑),且f必须保持单调递增。
(2)h必须小于等于实际的从当前节点到达目标节点的最小耗费h(n)<=h'(n)。
用A星算法解决八数码问题
A*算法解决八数码问题1 问题描述什么是八数码问题八数码游戏包括一个3×3的棋盘,棋盘上摆放着8个数字的棋子,留下一个空位。
与空位相邻的棋子可以滑动到空位中。
游戏的目的是要达到一个特定的目标状态。
标注的形式化如下:问题的搜索形式描述状态:状态描述了8个棋子和空位在棋盘的9个方格上的分布。
初始状态:任何状态都可以被指定为初始状态。
操作符:用来产生4个行动(上下左右移动)。
目标测试:用来检测状态是否能匹配上图的目标布局。
路径费用函数:每一步的费用为1,因此整个路径的费用是路径中的步数。
现在任意给定一个初始状态,要求找到一种搜索策略,用尽可能少的步数得到上图的目标状态。
解决方案介绍算法思想(估价函数是搜索特性的一种数学表示,是指从问题树根节点到达目标节点所要耗费的全部代价的一种估算,记为f(n)。
估价函数通常由两部分组成,其数学表达式为f(n)=g(n)+h(n)其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n 节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解)的条件,关键在于估价函数h(n)的选取。
估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
如果估价值>实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
搜索中利用启发式信息,对当前未扩展结点根据设定的估价函数值选取离目标最近的结点进行扩展,从而缩小搜索空间,更快的得到最优解,提高效率。
启发函数进一步考虑当前结点与目标结点的距离信息,令启发函数h ( n )为当前8个数字位与目标结点对应数字位距离和(不考虑中间路径),且对于目标状态有 h ( t ) = 0,对于结点m和n (n 是m的子结点)有h ( m ) – h ( n ) <= 1 = Cost ( m, n ) 满足单调限制条件。
八数码C语言A算法详细代码
#include<iostream>#include<time.h>#include<windows.h>#include<vector>#include<cmath>using namespace std;struct node{int a[3][3]; //存放矩阵int father; //父节点的位置int gone; //是否遍历过,1为是,0为否int fn; //评价函数的值int x,y; //空格的坐标int deep; //节点深度};vector<node> store; //存放路径节点int mx[4]={-1,0,1,0};int my[4]={0,-1,0,1}; //上下左右移动数组int top; //当前节点在store中的位置bool check(int num) //判断store[num]节点与目标节点是否相同,目标节点储存在store[0]中{for(int i=0;i<3;i++){for(int j=0;j<3;j++){if(store[num].a[i][j]!=store[0].a[i][j])return false;}}return true;}bool search(int num) //判断store[num]节点是否已经扩展过 ,没有扩展返回true{int pre=store[num].father; //pre指向store[num]的父节点位置bool test=true;while(!pre){ //循环直到pre为0,既初始节点for(int i=0;i<3;i++){for (int j=0;j<3;j++){if(store[pre].a[i][j]!=store[num].a[i][j]){test=false;break;}}if(test==false) break;}if(test==true) return false;pre=store[pre].father; //pre继续指向store[pre]父节点位置}return true;}void print(int num) //打印路径,store[num]为目标节点{vector<int> temp; //存放路径int pre=store[num].father;temp.push_back(num);while(pre!=0){ //从目标节点回溯到初始节点temp.push_back(pre);pre=store[pre].father;}cout<<endl;cout<<"*********数码移动步骤*********"<<endl;int mm=1; //步数for(int m=temp.size()-1;m>=0;m--){cout<<"---第"<<mm<<"步---:"<<endl;for(int i=0;i<3;i++){for(int j=0;j<3;j++){cout<<store[temp[m]].a[i][j]<<" ";}cout<<endl;}mm++;cout<<endl;}cout<<"所需步数为: "<<store[num].deep<<endl;return;}int get_fn(int num) //返回store[num]的评价函数值{int fn_temp=0; //评价函数值bool test=true;for(int i=0;i<3;i++){ //当找到一个值后,计算这个值位置与目标位置的距离差,test置为false后继续寻找下一个值for(int j=0;j<3;j++){test=true;for(int k=0;k<3;k++){for(int l=0;l<3;l++){if((store[num].x!=i||store[num].y!=j)&&store[num].a[i][j]==store[0].a[k][l]){ //寻值时排除空格位fn_temp=fn_temp+abs(i-k)+abs(j-l);test=false;}if(test==false) break;}if(test==false) break;}}}fn_temp=fn_temp+store[num].deep; //加上节点深度return fn_temp;}void kongxy(int num) //获得空格坐标{for(int i=0;i<3;i++){for(int j=0;j<3;j++){if(store[num].a[i][j]==0){store[num].x=i;store[num].y=j;}}}return;}int main(){cout<<"-----------A*算法解决8数码问题------------"<<endl;while(true){store.clear(); //清空storevector<int> open; //建立open表int i,j,m,n,f;int min; //store[min]储存fn值最小的节点int temp;bool test;top=1; //当前节点在store的位置,初始节点在store[1]int target[9];int begin[9]; //储存初始状态和目标状态,用于判断奇偶int t1=0,t2=0; //初始状态和目标状态的奇偶序数node node_temp;store.push_back(node_temp);store.push_back(node_temp); //用于创建store[0]和store[1],以便下面使用cout<<"请输入初始数码棋盘状态,0代表空格:"<<endl; //输入初始状态,储存在store[1]中test=false;while(test==false){f=0;for(i=0;i<3;i++){for(j=0;j<3;j++){cin>>temp;store[1].a[i][j]=temp;begin[f++]=temp;}}test=true;for(i=0;i<8;i++){ //检查是否有重复输入,若有则重新输入for(j=i+1;j<9;j++){if(begin[i]==begin[j]){test=false;break;}}if(test==false) break;}if(test==false) cout<<"输入重复,请重新输入:"<<endl;}kongxy(1); //找出空格的坐标cout<<"请输入目标数码棋盘状态,0代表空格: "<<endl; //输入目标状态,储存在store[0]中test=false;while(test==false){f=0;for(i=0;i<3;i++){for(j=0;j<3;j++){cin>>temp;store[0].a[i][j]=temp;target[f++]=temp;}}test=true;for(i=0;i<8;i++){ //检查是否有重复输入,若有则重新输入for(j=i+1;j<9;j++){if(target[i]==target[j]){test=false;break;}}if(test==false) break;}if(test==false){cout<<"输入重复,请重新输入:"<<endl;continue; //若重复,重新输入}for(i=0;i<9;i++){ //检查目标状态与初始状态是否匹配test=false;for(j=0;j<9;j++){if(begin[i]==target[j]){test=true;break;}}if(test==false) break;}if(test==false) cout<<"输入与初始状态不匹配,请重新输入:"<<endl;}for(i=1;i<9;i++){ //判断奇偶序数是否相同,若不相同则无法找到路径for(j=1;i-j>=0;j++){if(begin[i]>begin[i-j]){if(begin[i-j]!=0) t1++;}}}for(i=1;i<9;i++){for(j=1;i-j>=0;j++){if(target[i]>target[i-j]){if(target[i-j]!=0) t2++;}}}if(!(t1%2==t2%2)){cout<<"无法找到路径."<<endl;cout<<endl;//system("pause");//return 0;continue;}LARGE_INTEGER Freg;LARGE_INTEGER Count1,Count2;QueryPerformanceFrequency(&Freg);QueryPerformanceCounter(&Count1);//获取时间Count1double d;store[1].father=0; //初始化参数store[1].gone=0;store[1].deep=0; //初始节点的父节点为0store[1].fn=get_fn(1);if(check(1)){ //判断初始状态与目标状态是否相同print(1);//system("pause");//return 0;cout<<endl;continue;}open.push_back(1); //把初始状态在store中的位置数压入open表中while(!open.empty()){ //当open表不为空时,开始寻找路径if(check(top)) break;min=top;int i_min=0;for(i=0;i<open.size();i++){ //遍历open表中元素,找出store中fn值最小的节点if(store[open[i]].fn<=store[min].fn&&store[open[i]].gone==0){min=open[i];i_min=i;}}store[min].gone=1;open.erase(open.begin()+i_min); //把最小节点标记遍历过,并从open表中删除m=store[min].x;n=store[min].y; //空格坐标for(f=0;f<4;f++){ //上下左右移动空格i=m+mx[f];j=n+my[f];if(i>=0&&i<=2&&j>=0&&j<=2){ //当变换后的空格坐标在矩阵中时,开始移动top++;store.push_back(store[min]); //把store[min]压入store中成为新增节点,位置为store[top]store[top].father=min; //新增节点的父节点为minstore[top].gone=0; //新增节点未被访问store[top].deep=store[min].deep+1; //新增节点的深度为父节点深度+1temp=store[top].a[m][n]; //交换空格与相邻数字store[top].a[m][n]=store[top].a[i][j];store[top].a[i][j]=temp;store[top].x=i; //移动后的空格坐标store[top].y=j;store[top].fn=get_fn(top); //移动后的fn值open.push_back(top); //把top压入open表中if(check(top)){ //检查是否到达目标print(top);//system("pause");//return 0;break;}if(search(top)==false){ //检查新增节点是否被访问过,若访问过,则删除此节点top--;store.pop_back();open.pop_back();}}}}QueryPerformanceCounter(&Count2);//获取时间Count2d=(double)(Count2.QuadPart-Count1.QuadPart)/(double)Freg.QuadPart*1000.0;//计算时间差,d的单位为ms.cout<<"算法时间为为"<<d<<" ms."<<endl;cout<<endl;}return 0;system("pause");}。
a算法求解八数码问题 实验报告
题目: a算法求解八数码问题实验报告目录1. 实验目的2. 实验设计3. 实验过程4. 实验结果5. 实验分析6. 实验总结1. 实验目的本实验旨在通过实验验证a算法在求解八数码问题时的效果,并对其进行分析和总结。
2. 实验设计a算法是一种启发式搜索算法,主要用于在图形搜索和有向图中找到最短路径。
在本实验中,我们将使用a算法来解决八数码问题,即在3x3的九宫格中,给定一个初始状态和一个目标状态,通过移动数字的方式将初始状态转变为目标状态。
具体的实验设计如下:1) 实验工具:我们将使用编程语言来实现a算法,并结合九宫格的数据结构来解决八数码问题。
2) 实验流程:我们将设计一个初始状态和一个目标状态,然后通过a 算法来求解初始状态到目标状态的最短路径。
在求解的过程中,我们将记录下每一步的状态变化和移动路径。
3. 实验过程我们在编程语言中实现了a算法,并用于求解八数码问题。
具体的实验过程如下:1) 初始状态和目标状态的设计:我们设计了一个初始状态和一个目标状态,分别为:初始状态:1 2 34 5 67 8 0目标状态:1 2 38 0 42) a算法求解:我们通过a算法来求解初始状态到目标状态的最短路径,并记录下每一步的状态变化和移动路径。
3) 实验结果在实验中,我们成功求解出了初始状态到目标状态的最短路径,并记录下了每一步的状态变化和移动路径。
具体的实验结果如下:初始状态:1 2 34 5 67 8 0目标状态:1 2 38 0 47 6 5求解路径:1. 上移1 2 37 8 62. 左移1 2 3 4 0 5 7 8 63. 下移1 2 3 4 8 5 7 0 64. 右移1 2 3 4 8 5 0 7 65. 上移1 2 3 0 8 5 4 7 61 2 38 0 54 7 67. 下移1 2 38 7 54 0 68. 右移1 2 38 7 54 6 0共计8步,成功从初始状态到目标状态的最短路径。
人工智能A星算法解决八数码难题程序代码
#include "Stdio.h"#include "Conio.h"#include "stdlib.h"#include "math.h"void Copy_node(struct node *p1,struct node *p2);void Calculate_f(int deepth,struct node *p);void Add_to_open(struct node *p);void Add_to_closed(struct node *p);void Remove_p(struct node *name,struct node *p);int Test_A_B(struct node *p1,struct node *p2);struct node * Search_A(struct node *name,struct node *temp); void Print_result(struct node *p);struct node // 定义8数码的节点状态{int s[3][3]; //当前8数码的状态int i_0; //当前空格所在行号int j_0; //当前空格所在列号int f; //当前代价值int d; //当前节点深度int h; //启发信息,采用数码"不在位"距离和struct node *father; //指向解路径上该节点的父节点struct node *next; //指向所在open或closed表中的下一个元素} ;struct node s_0={{2,8,3,1,6,4,7,0,5},2,1,0,0,0,NULL,NULL}; //定义初始状态struct node s_g={{1,2,3,8,0,4,7,6,5},1,1,0,0,0,NULL,NULL}; //定义目标状态struct node *open=NULL; //建立open表指针struct node *closed=NULL; //建立closed表指针int sum_node=0; //用于记录扩展节点总数//***********************************************************//********************** **********************//********************** 主函数开始**********************//********************** **********************//***********************************************************void main(){int bingo=0; //定义查找成功标志,bingo=1,成功struct node s; //定义头结点sstruct node *target,*n,*ls,*temp,*same; //定义结构体指针Copy_node(&s_0,&s); //复制初始状s_0态给头结点s Calculate_f(0,&s); //计算头结点的代价值Add_to_open(&s); //将头结点s放入open表while(open!=NULL) //只要open表不为空,进行以下循环{n=open; //n指向open表中当前要扩展的元素ls=open->next;Add_to_closed(n);open=ls; //将n指向的节点放入closed表中if(Test_A_B(n,&s_g)) //当前n指向节点为目标时,跳出程序结束;否则,继续下面的步骤{bingo=1;break;}elseif(n->j_0>=1) //空格所在列号不小于1,可左移{temp=n->father;if(temp!=NULL&&temp->i_0==n->i_0&&temp->j_0-1==n->j_0) //新节点与其祖父节点相同;else //新节点与其祖父节点不同,或其父节点为起始节点{temp=(struct node *)malloc(sizeof(struct node)); //给新节点分配空间Copy_node(n,temp); //拷贝n指向的节点状态temp->s[temp->i_0][temp->j_0]=temp->s[temp->i_0][temp->j_0-1]; //空格左移temp->s[temp->i_0][temp->j_0-1]=0;temp->j_0--;temp->d++;Calculate_f(temp->d,temp); //修改新节点的代价值temp->father=n; //新节点指向其父节点if(same=Search_A(closed,temp)) //在closed表中找到与新节点状态相同的节点{if(temp->f<same->f) //temp指向的节点,其代价比closed表中相同状态节点代价小,加入open表{Remove_p(closed,same); //从closed表中删除与temp指向节点状态相同的节点Add_to_open(temp);sum_node++;}else;}else if(same=Search_A(open,temp)) //在open表中找到与新节点状态相同的节点{if(temp->f<same->f) //temp指向的节点,其代价比open表中相同状态节点代价小,加入open表{Remove_p(open,same); //从open表中删除与temp指向节点状态相同的节点Add_to_open(temp);sum_node++;}else ;}else //新节点为完全不同的新节点,加入open表{Add_to_open(temp);sum_node++;}}}//end左移if(n->j_0<=1) //空格所在列号不大于1,可右移{temp=n->father;if(temp!=NULL&&temp->i_0==n->i_0&&temp->j_0+1==n->j_0) //新节点与其祖父节点相同;else //新节点与其祖父节点不同,或其父节点为起始节点{temp=(struct node *)malloc(sizeof(struct node)); //给新节点分配空间Copy_node(n,temp); //拷贝p指向的节点状态temp->s[temp->i_0][temp->j_0]=temp->s[temp->i_0][temp->j_0+1]; //空格右移temp->s[temp->i_0][temp->j_0+1]=0;temp->j_0++;temp->d++;Calculate_f(temp->d,temp); //修改新节点的代价值temp->father=n; //新节点指向其父节点if(same=Search_A(closed,temp)) //在closed表中找到与新节点状态相同的节点{if(temp->f<same->f) //temp指向的节点,其代价比closed表中相同状态节点代价小,加入open表{Remove_p(closed,same); //从closed表中删除与temp指向节点状态相同的节点Add_to_open(temp);sum_node++;}else;}else if(same=Search_A(open,temp)) //在open表中找到与新节点状态相同的节点{if(temp->f<same->f) //temp指向的节点,其代价比open表中相同状态节点代价小,加入open表{Remove_p(open,same); //从open表中删除与temp指向节点状态相同的节点Add_to_open(temp);sum_node++;}else ;}else //新节点为完全不同的新节点,加入open表{Add_to_open(temp);sum_node++;}}}//end右移if(n->i_0>=1) //空格所在列号不小于1,上移{temp=n->father;if(temp!=NULL&&temp->i_0==n->i_0-1&&temp->j_0==n->j_0) //新节点与其祖父节点相同;else //新节点与其祖父节点不同,或其父节点为起始节点{temp=(struct node *)malloc(sizeof(struct node)); //给新节点分配空间Copy_node(n,temp); //拷贝p指向的节点状态temp->s[temp->i_0][temp->j_0]=temp->s[temp->i_0-1][temp->j_0];//空格上移temp->s[temp->i_0-1][temp->j_0]=0;temp->i_0--;temp->d++;Calculate_f(temp->d,temp); //修改新节点的代价值temp->father=n; //新节点指向其父节点if(same=Search_A(closed,temp)) //在closed表中找到与新节点状态相同的节点{if(temp->f<same->f) //temp指向的节点,其代价比closed表中相同状态节点代价小,加入open表{Remove_p(closed,same); //从closed表中删除与temp指向节点状态相同的节点Add_to_open(temp);sum_node++;}else;}else if(same=Search_A(open,temp)) //在open表中找到与新节点状态相同的节点{if(temp->f<same->f) //temp指向的节点,其代价比open表中相同状态节点代价小,加入open表{Remove_p(open,same); //从open表中删除与temp指向节点状态相同的节点Add_to_open(temp);sum_node++;}else ;}else //新节点为完全不同的新节点,加入open表{Add_to_open(temp);sum_node++;}}}//end上移if(n->i_0<=1) //空格所在列号不大于1,下移{temp=n->father;if(temp!=NULL&&temp->i_0==n->i_0+1&&temp->j_0==n->j_0) //新节点与其祖父节点相同;else //新节点与其祖父节点不同,或其父节点为起始节点{temp=(struct node *)malloc(sizeof(struct node)); //给新节点分配空间Copy_node(n,temp); //拷贝p指向的节点状态temp->s[temp->i_0][temp->j_0]=temp->s[temp->i_0+1][temp->j_0]; //空格下移temp->s[temp->i_0+1][temp->j_0]=0;temp->i_0++;temp->d++;Calculate_f(temp->d,temp); //修改新节点的代价值temp->father=n; //新节点指向其父节点if(same=Search_A(closed,temp)) //在closed表中找到与新节点状态相同的节点{if(temp->f<same->f) //temp指向的节点,其代价比closed表中相同状态节点代价小,加入open表{Remove_p(closed,same); //从closed表中删除与temp指向节点状态相同的节点Add_to_open(temp);sum_node++;}else;}else if(same=Search_A(open,temp)) //在open表中找到与新节点状态相同的节点{if(temp->f<same->f) //temp指向的节点,其代价比open表中相同状态节点代价小,加入open表{Remove_p(open,same); //从open表中删除与temp指向节点状态相同的节点Add_to_open(temp);sum_node++;}else ;}else //新节点为完全不同的新节点,加入open表{Add_to_open(temp);sum_node++;}}}//end下移}if(bingo=1) Print_result(n); //输出解路径else printf("问题求解失败!");}//主函数结束//************************************************************************* //********************** ********************** //********************** 计算某个节点状态的代价值********************** //********************** ********************** //*************************************************************************void Calculate_f(int deepth,struct node *p){int i,j,temp;temp=0;for(i=0;i<=2;i++) //计算所有"不在位"数码的距离和{for(j=0;j<=2;j++){if((p->s[i][j])!=(s_g.s[i][j]))temp++;}}p->h=temp;p->f=deepth+p->h;}//*************************************************************************//********************** **********************//********************** 添加p指向的节点到open表中********************** //********************** **********************//*************************************************************************void Add_to_open(struct node *p){struct node *p1,*p2;p1=open; //初始时p1指向open表首部p2=NULL;if(open==NULL) //open表为空时,待插入节点即为open表第一个元素,open 指向该元素{p->next=NULL;open=p;}else //open表不为空时,添加待插入节点,并保证open表代价递增的排序{while(p1!=NULL&&p->f>p1->f){p2=p1; //p2始终指向p1指向的前一个元素p1=p1->next;}if(p2==NULL) //待插入节点为当前open表最小{p->next=open;open=p;}else if(p1==NULL) //待插入节点为当前open表最大{p->next=NULL;p2->next=p;}else //待插入节点介于p2、p1之间{p2->next=p;p->next=p1;}}}//***************************************************************************//********************** **********************//********************** 添加p指向的节点到closed表中**********************//********************** **********************//***************************************************************************void Add_to_closed(struct node *p){if(closed==NULL) //closed表为空时,p指向节点为closed表第一个元素,closed{p->next=NULL;closed=p;}else //closed表不为空时,直接放到closed表首部{p->next=closed;closed=p;}}//************************************************************************************* *************//********************************************//********************** 在open表或closed表中搜索和temp指向的节点相同的节点**********************//********************************************//*************************************************************************************struct node * Search_A(struct node *name,struct node *temp){struct node *p1;p1=name; //p1指向open表或closed表while(p1!=NULL){if(Test_A_B(p1,temp)) //找到相同的节点,返回该节点地址return p1;elsep1=p1->next;}return NULL;}//************************************************************************************* **********//********************************************//********************** 判断两个节点状态是否相同,相同则返回1,否则返回0 **********************//********************************************//************************************************************************************* **********int Test_A_B(struct node *p1,struct node *p2){int i,j,flag;flag=1;for(i=0;i<=2;i++)for(j=0;j<=2;j++){if((p2->s[i][j])!=(p1->s[i][j])) { flag=0; return flag; }else ;}return flag;}//******************************************************************************//********************** **********************//********************** 从open表或closed表删除指定节点********************** //********************** **********************//******************************************************************************void Remove_p(struct node *name,struct node *p){struct node *p1,*p2;p1=NULL;p2=NULL;if(name==NULL) //如果name指向的链表为空,则不需要进行删除return;else if(Test_A_B(name,p)&&name->f==p->f) //指定节点为name指向的链表的第一个元素{open=name->next;name->next=NULL;return;}else{p2=name;p1=p2->next;while(p1){if(Test_A_B(p1,p)&&p1->f==p->f) //找到指定节点{p2->next=p1->next;return;}else{p2=p1; //p2始终指向p1指向的前一个元素p1=p1->next;}}return;}}//************************************************************************************* *//********************************************//********************** 将p1指向的节点状态拷贝到p2指向的节点中**********************//********************************************//************************************************************************************* *void Copy_node(struct node *p1,struct node *p2){int i,j;for(i=0;i<=2;i++){for(j=0;j<=2;j++){ p2->s[i][j]=p1->s[i][j]; }}p2->i_0=p1->i_0;p2->j_0=p1->j_0;p2->f=p1->f;p2->d=p1->d;p2->h=p1->h;p2->next=p1->next;p2->father=p1->father;}//*********************************************************** //********************** ********************** //********************** 输出结果********************** //********************** ********************** //***********************************************************void Print_result(struct node *p){struct node *path[100];struct node *temp,*temp_father;int i,j,k;for(i=0;i<=99;i++) //初始化路径指针数组path[i]=0;temp=p;printf("总共扩展%d 个节点\n",sum_node);printf("总共扩展%d 层\n",temp->d);printf("解路径如下:\n");for(i=p->d;i>=0;i--) //存储解路径上各节点的地址{path[i]=temp;temp=temp->father;}for(k=0;k<=p->d;k++) //输出解路径{temp=path[k]; //建立节点指点指针printf("第%d步",temp->d);if(k-1>=0) //输出移动策略{temp_father=path[k-1];if(temp->i_0<temp_father->i_0) printf("->上移\n");if(temp->i_0>temp_father->i_0) printf("->下移\n");if(temp->j_0<temp_father->j_0) printf("->左移\n");if(temp->j_0>temp_father->j_0) printf("->右移\n");}elseprintf("\n");printf("当前节点状态为:\n");for(i=0;i<=2;i++){for(j=0;j<=2;j++){printf("%d ",temp->s[i][j]);}printf("\n");}printf("\n");}}THANKS !!!致力为企业和个人提供合同协议,策划案计划书,学习课件等等打造全网一站式需求欢迎您的下载,资料仅供参考。
用A星算法解决八数码问题
A*算法解决八数码问题1 问题描述什么是八数码问题八数码游戏包括一个3×3的棋盘,棋盘上摆放着8个数字的棋子,留下一个空位。
与空位相邻的棋子可以滑动到空位中。
游戏的目的是要达到一个特定的目标状态。
标注的形式化如下:问题的搜索形式描述状态:状态描述了8个棋子和空位在棋盘的9个方格上的分布。
初始状态:任何状态都可以被指定为初始状态。
操作符:用来产生4个行动(上下左右移动)。
目标测试:用来检测状态是否能匹配上图的目标布局。
路径费用函数:每一步的费用为1,因此整个路径的费用是路径中的步数。
现在任意给定一个初始状态,要求找到一种搜索策略,用尽可能少的步数得到上图的目标状态。
解决方案介绍算法思想(估价函数是搜索特性的一种数学表示,是指从问题树根节点到达目标节点所要耗费的全部代价的一种估算,记为f(n)。
估价函数通常由两部分组成,其数学表达式为f(n)=g(n)+h(n)其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n 节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解)的条件,关键在于估价函数h(n)的选取。
估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
如果估价值>实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
搜索中利用启发式信息,对当前未扩展结点根据设定的估价函数值选取离目标最近的结点进行扩展,从而缩小搜索空间,更快的得到最优解,提高效率。
启发函数进一步考虑当前结点与目标结点的距离信息,令启发函数h ( n )为当前8个数字位与目标结点对应数字位距离和(不考虑中间路径),且对于目标状态有 h ( t ) = 0,对于结点m和n (n 是m的子结点)有h ( m ) – h ( n ) <= 1 = Cost ( m, n ) 满足单调限制条件。
八数码C语言A算法详细代码

bool eheek(int num)//判断store[num]节点与目标节点是否相同,目标节点储存在store[0]中 {for(i nt i=0;i<3;i++){for(int j=0;j<3;j++){if(store[ num].a[i][j]!=store[0].a[i][j])return false;}}return true;}bool seareh(int num)//判断store[num]节点是否已经扩展过 ,没有扩展返回true{int pre=store[num].father;//pre 指向 store[num]的父节点位置 bool test= true;while(!pre){//循环直到pre 为0,既初始节点 for(int i=0;i<3;i++){for (in t j=0;j<3;j++){if(store[pre].a[i][j]!=store[ num].a[i][j]){test= false; break; #inelude <iostream> #inelude <time.h> #inelude <windows.h> #inelude <veetor>#inelude <emath> using namespaee std;struet no de{ in t a[3][3]; int father; int gone;int fn; int x,y;int deep; }; vector <no de> store; int mx[4]={-1,0,1,0}; int my[4]={0,-1,0,1}; int top;//存放矩阵 //父节点的位置 //是否遍历过,1为是,0为否 //评价函数的值 //空格的坐标 //节点深度 //存放路径节点 //上下左右移动数组//当前节点在store 中的位置if(test== false) break;}if(test== true) return false; pre=store[pre].father;} return true;}void pri nt( int n um) { vectorv int> temp;int pre=store [n um].father; temp.push_back (n um);while(pre!=O){ temp.push_back(pre); pre=store[pre].father; }//打印路径,store[num]为目标节点//存放路径//从目标节点回溯到初始节点cout«e ndl;cout« "********* 数码移动步骤 *********“ <<endl;int mm=1; // 步数for(int m=temp.size()_1;m>=0;m__){cout« "---第"vvmmvv "步---:"<<endl; for(int i=0;i<3;i++){for(int j=0;j<3;j++){ cout<<store[temp[m]].a[i][j]<< ""}cout«e ndl;}mm++;cout«e ndl;}cout<< "所需步数为:"vvstore[num].deep<<endl; return;}//返回store[num]的评价函数值//评价函数值//当找到一个值后,计算这个值位置与目标位置的距离差//pre 继续指向store[pre]父节点位置int get_f n(int n um) {int fn_ temp=0; bool test= true;for(i nt i=0;i<3;i++){ 后继续寻找下一个值 ,test置为 falsefor(int j=0;j<3;j++){test= true;for(int k=0;k<3;k++){for(int l=0;l<3;l++){if((store[ num].x!=i||store[ num].y!=j )&&store[ num].a[i][j]==store[0].a[k][l]){ 位fn _temp=f n_temp+abs(i-k)+abs(j-l);test= false;}if(test== false) break;}if(test== false) break;}}}fn_temp=fn_temp+store[ num].deep; // 加上节点深度return fn_temp;}void kon gxy(i nt num) // 获得空格坐标{for(i nt i=0;i<3;i++){for(int j=0;j<3;j++){if(store[ num].a[i][j]==0){store [n um].x=i;store [n um].y=j;}}}return;}//寻值时排除空格int mai n(){cout<< " ............. A* 算法解决8数码问题 ....... " <<endl;while(true){ store.clear(); vectorv int > open; int i,j,m,n,f; int min; int temp; bool test; 〃清空store//建立open表〃store[min]储存fn值最小的节点top=1; //当前节点在store的位置,初始节点在store[1]in t target[9]; int begin[ 9]; //储存初始状态和目标状态,用于判断奇偶in t t1=0,t2=0; //初始状态和目标状态的奇偶序数node no de_temp;store.push_back (no de_temp);store.push_back(node_temp); // 用于创建store[0]和store[1],以便下面使用cout<< "请输入初始数码棋盘状态,0代表空格:"<<endl; //输入初始状态,储存在store[1]中test= false;while(test== false){f=0;for(i=0;i<3;i++){for(j=0;j<3;j++){cin> >temp;store[1].a[i][j]=temp;begi n[ f++]=temp;}}test= true;for(i=0;i<8;i++){ //检查是否有重复输入,若有则重新输入for(j=i+1;j<9;j++){if(begi n[ i]==begi n[j]){test= false;break;}}if(test== false) break;}if(test== false) cout<< "输入重复,请重新输入:"<<endl;}kongxy(1); //找岀空格的坐标cout<< "请输入目标数码棋盘状态,0代表空格:"<<endl; //输入目标状态,储存在store[0] 中test= false;while(test== false){f=0;for(i=0;i<3;i++){for(j=0;j<3;j++){cin> >temp;store[0].a[i][j]=temp;target[f++]=temp;}}test= true;for(i=0;i<8;i++){ //检查是否有重复输入,若有则重新输入for(j=i+1;j<9;j++){if(target[i]==target[j]){test= false;break;}}if(test== false) break;}if(test== false){cout<< "输入重复,请重新输入:"<<endl;continue ; //若重复,重新输入}for(i=0;i<9;i++){ //检查目标状态与初始状态是否匹配test= false;for(j=0;j<9;j++){if(begi n[ i]==target[j]){test= true;break;}}if(test== false) break;}if(test== false) cout<< "输入与初始状态不匹配,请重新输入:"<<endl;}for(i=1;i<9;i++){ //判断奇偶序数是否相同若不相同则无法找到路径for(j=1;i-j>=0;j++){if(begi n[i]>begi n[ i-j]){if(begin[i-j]!=0) t1++;for(i=1;i<9;i++){for(j=1;i-j>=0;j++){ if(target[i]>target[i-j]){if(target[i-j]!=O) t2++;}}}if(!(t1%2==t2%2)){cout« "无法找到路径."<<endl;cout«e ndl;〃system("pause");//return 0;continue ;}LARGE」N TEGER Freg;LARGE」N TEGER Cou nt1,Cou nt2;QueryPerforma nceFreque ncy(&Freg); QueryPerformanceCounter(&Count1); // 获取时间Count1 double d;store[1].father=0; store[1].go ne=0; store[1].deep=0; store[1].fn=get_f n (1); //初始化参数//初始节点的父节点为0if(check(1)){prin t(1);〃system("pause");//return 0;cout«e ndl;continue ;//判断初始状态与目标状态是否相同open.push_back(1);//把初始状态在store中的位置数压入open表中while(!ope n. empty()){ //当open表不为空时,开始寻找路径if(check(top)) break;mi n=top;int i_mi n=0;for(i=0;i<open.size();i++){ //遍历open表中元素,找岀store中fn值最小的节点if(store[ope n[i]].fn<=store[mi n].fn&&store[ope n[ i]].g on e==0){min=ope n[i];i_mi n=i;}}store [min ].go ne=1;open.erase(open.begin()+i_min); //把最小节点标记遍历过,并从open表中删除m=store[mi n].x;n=store[min].y; //空格坐标for(f=0;f<4;f++){ //上下左右移动空格i=m+mx[f];j=n+my[f];if(i>=0&&i<=2&&j>=0&&j<=2){ //当变换后的空格坐标在矩阵中时开始移动top++;store.push_back(store[min]); //把store[min]压入store 中成为新增节点,位置为store[top]store[top].father=min; //新增节点的父节点为minstore[top].gone=0; //新增节点未被访问store[top].deep=store[min].deep+1; //新增节点的深度为父节点深度+1temp=store[top].a[m][ n]; //交换空格与相邻数字store[top].a[m][ n]=store[top].a[i][j];store[top].a[i][j]=temp;store[top].x=i; //移动后的空格坐标store[top].y=j;store[top].fn=get_fn(top); //移动后的fn值ope n.push_back(top); // 把top 压入ope n 表中if(check(top)){ //检查是否到达目标pr in t(top);//system("pause");//return 0;break;}if(search(top)== false){ //检查新增节点是否被访问过,若访问过,则删除此节点top--;store.pop_back();ope n.pop_back();}}}}QueryPerformanceCounter(&Count2); // 获取时间Count2d=(double )(Count2.QuadPart-Count1.QuadPart)/( double )Freg.QuadPart*1000.0; // 计算时间差,d的单位为ms.cout<< "算法时间为为"<<d<< " ms."<<endl;cout«e ndl;}return 0;system("pause");}。
八数码问题实验报告

八数码问题实验报告八数码问题实验报告引言:八数码问题,也被称为九宫格问题,是一种经典的数学谜题。
在一个3x3的方格中,摆放有1至8的数字,其中一个位置为空。
目标是通过交换数字的位置,将数字按照从小到大的顺序排列,最终使得空格位于最后一个位置。
本实验旨在通过编程实现八数码问题的求解,并探讨不同算法在解决该问题上的效果和优劣。
实验步骤:1. 算法选择在本次实验中,我们选择了广度优先搜索算法和A*算法作为求解八数码问题的两种不同方法。
广度优先搜索算法是一种盲目搜索算法,它通过逐层扩展搜索树,直到找到目标状态。
而A*算法则是一种启发式搜索算法,它结合了广度优先搜索和启发式函数,通过评估每个状态的代价来指导搜索过程,以找到最优解。
2. 算法实现我们使用Python语言实现了以上两种算法。
首先,我们定义了一个表示状态的类,并实现了状态的初始化、移动、判断是否达到目标状态等基本操作。
然后,我们分别编写了广度优先搜索算法和A*算法的求解函数。
在广度优先搜索算法中,我们使用队列数据结构来保存待扩展的状态,以实现逐层扩展的效果;在A*算法中,我们使用优先队列来保存待扩展的状态,并根据启发式函数的值进行优先级排序。
3. 实验结果我们使用了多个测试样例来验证两种算法的求解效果。
实验结果表明,广度优先搜索算法能够找到解,但是在面对状态空间较大的情况下,搜索时间会呈指数级增长。
而A*算法则能够更快地找到最优解,其效率相对较高。
然而,A*算法需要选择合适的启发式函数,并且对于某些特殊情况,可能会陷入局部最优解而无法找到最优解。
4. 结果分析通过对比两种算法的求解结果,我们可以发现广度优先搜索算法和A*算法在时间效率和解的质量上存在一定的差异。
广度优先搜索算法适用于状态空间较小的情况,但是在状态空间较大时效率较低;而A*算法则能够在较短的时间内找到最优解,但需要对问题进行合理的建模和启发式函数的选择。
因此,在实际应用中,我们需要根据问题的规模和特点来选择合适的算法。
A星算法实现八数码问题的代码 c++实现 可以直接编译运行
*文件Chess.h,包含必要的数据结构,全局变量和类声明*/#ifndef _YLQ_CHESS_#define _YLQ_CHESS_#include <algorithm>#include <iostream>#include <vector>#ifndef N#define N 3#endif#define BLANK 0static int g_iId=1;typedef struct tagNode{int node[N][N];int iF,iH,iG;int id,idParent;}NODE,*PNODE;typedef std::vector<NODE> OPEN;#define CLOSED OPEN#define SUCCERSSOR OPENclass Chess{public:Chess(NODE const &nstar,NODE const &nend); private:OPEN m_vOpen,m_vClosed;NODE m_nStart,m_nEnd;bool NodeEuqal(NODE node1,NODE node2);bool NodeExist(NODE node);bool InOpen(NODE node,int &index);bool InClose(NODE node,int &index);SUCCERSSOR ExplortNode(NODE node); protected:virtual int CaculateHV(NODE &node);//计算h值和f值public:bool Algorithms();void Show(int it);//it=1展示Open,2->Closed};#endif*文件Chess.cpp,包含算法实现*/#include "Chess.h"#include <MA TH.H>bool comp(const NODE &n1,const NODE &n2){return n1.iF>n2.iF;}void Chess::Show(int tp){SUCCERSSOR::iterator it,iend;if (tp==1) {it=m_vOpen.begin();iend=m_vOpen.end();}else{it=m_vClosed.begin();iend=m_vClosed.end();}for (;it!=iend;it++){printf("iF=%d;iG=%d;iH=%d\n",(PNODE)it->iF,(PNODE)it->iG,(PNODE)it->iH);printf("id=%d;idParent=%d\n",(PNODE)it->id,(PNODE)it->idParent);for(int i=0;i<N;i++){for (int j=0;j<N;j++){printf("%d ",(PNODE)it->node[i][j]);}std::cout<<std::endl;}}}Chess::Chess(const NODE &nstar,const NODE &nend){m_nStart = nstar;m_nEnd = nend;m_nStart.idParent=0;//初始结点的父节点设为0m_nStart.id = 1;m_nStart.iG=0;//初始结点G设为0,再次结点扩展一次就+1( 表示深度);CaculateHV(m_nStart);//初始化开始结点h和f以及gm_vOpen.push_back(m_nStart);}int Chess::CaculateHV(NODE &node){//用位置差来计算h值node.iH=0;for (int i=0;i<N;i++){for (int j=0;j<N;j++){bool bget=false;for (int m=0;m<N;m++){for (int n=0;n<N;n++){if (node.node[m][n] == m_nEnd.node[i][j]) {node.iH+=abs(m-i)+abs(n-j);bget=true;break;}}if (bget)break;}}}node.iF =node.iG+node.iH;return node.iH;}bool Chess::NodeEuqal(NODE node1,NODE node2){int sum=0;for (int i=0;i<N;i++)for (int j=0;j<N;j++){if (node1.node[i][j] == node2.node[i][j]) {sum++;}}if (sum==N*N) {return true;}elsereturn false;}bool Chess::InOpen(NODE node,int &index){//查找node是否在Open表中,是的返回true并返回指针位置index OPEN::iterator itOpen=m_vOpen.begin();index=0;for (;itOpen!=m_vOpen.end();itOpen++){if (NodeEuqal(node,*(PNODE)itOpen->node)) {return true;}index++;}return false;}bool Chess::InClose(NODE node,int &index){//查找node是否在InClose表中,是的返回true并返回指针位置index CLOSED::iterator itClosed=m_vClosed.begin();index=0;for (;itClosed!=m_vClosed.end();itClosed++){if (NodeEuqal(node,*(PNODE)itClosed->node)) {return true;}index++;}return false;}bool Chess::NodeExist(NODE node){int i;if (InOpen(node,i) || InClose(node,i)) {return true;}return false;}SUCCERSSOR Chess::ExplortNode(NODE node){//扩展结点,并插入到SUCCERSSOR队列中int i,j;SUCCERSSOR temp;for (i=0;i<N;i++)for (j=0;j<N;j++)if (node.node[i][j]==BLANK){//找到空格,开始扩张,按照空格依次往上下左右扩展,判断其合法性if (j>0) {NODE ntemp=node;ntemp.node[i][j]=ntemp.node[i][j-1];ntemp.node[i][j-1]=BLANK;g_iId++;ntemp.id=g_iId;ntemp.idParent = node.id;ntemp.iG=ntemp.iG+1;CaculateHV(ntemp);temp.push_back(ntemp);}if (j<N-1) {NODE ntemp=node;ntemp.node[i][j]=ntemp.node[i][j+1];ntemp.node[i][j+1]=BLANK;g_iId++;ntemp.id=g_iId;ntemp.idParent = node.id;ntemp.iG=ntemp.iG+1;CaculateHV(ntemp);temp.push_back(ntemp);}if (i>0) {NODE ntemp=node;ntemp.node[i][j]=ntemp.node[i-1][j];ntemp.node[i-1][j]=BLANK;g_iId++;ntemp.id=g_iId;ntemp.idParent = node.id;ntemp.iG=ntemp.iG+1;CaculateHV(ntemp);temp.push_back(ntemp);}if (i<N-1) {NODE ntemp=node;ntemp.node[i][j]=ntemp.node[i+1][j];ntemp.node[i+1][j]=BLANK;g_iId++;ntemp.id=g_iId;ntemp.idParent = node.id;ntemp.iG=ntemp.iG+1;CaculateHV(ntemp);temp.push_back(ntemp);}}return temp;}bool Chess::Algorithms(){NODE nTemp;while (m_vOpen.size()!=0){std::sort(m_vOpen.begin(),m_vOpen.end(),comp);//取出f值最小的进行扩展nTemp = *((PNODE)(m_vOpen.end()-1));m_vOpen.pop_back();m_vClosed.push_back(nTemp);if (NodeEuqal(nTemp,m_nEnd))return true;SUCCERSSOR stemp=ExplortNode(nTemp);SUCCERSSOR::iterator isuc=stemp.begin();for (;isuc!=stemp.end();isuc++){int indexOp,indexCl=0;NODE suc=*(PNODE)isuc,*old;if (InOpen(suc,indexOp)) {old = (PNODE)(m_vOpen.begin()+indexOp);if (suc.iG<old->iG){//若G值比原先的小,则直接修改old结点old->iG = suc.iG;//修改其父节点,指向suc结点old->idParent = suc.idParent;old->iF = old->iG+old->iH;}}else if (InClose(suc,indexCl)){old = (PNODE)(m_vClosed.begin()+indexCl);if (suc.iG<old->iG){//若G值比原先的小,则直接修改old结点old->iG = suc.iG;//修改其父节点,指向suc结点old->idParent = suc.idParent;old->iF = old->iG+old->iH;}}else{m_vOpen.push_back(suc);}}}return false;}/**文件main.cpp,如何使用该类*/#include "Chess.h"#include <IOSTREAM>using namespace std;NODE nStart={{2,8,3,0,1,4,7,6,5},0,0,0,g_iId,0};NODE nEnd={{1,2,3,8,0,4,7,6,5},0,0,0,0,0};int main(int argc,char *argv){Chess *chess=new Chess(nStart,nEnd);if (chess->Algorithms()){cout<<"搜索成功:\n";chess->Show(2);}return 0;}。
A-star-算法-八数码问题-C++-报告+代码+详细注释

二、程序运行测试A*算法求解八数码问题一、详细设计说明1.评价函数以当前状态下各将牌到目标位置的距离之和作为节点的评价标准。
距离的定义为:“某将牌行下标与目标位置行下标之差的绝对值 + 列下标与目标位置列下标之差的绝对值”。
距离越小,该节点的效果越好。
某个状态所有将牌到目标位置的距离之和用“h值”表示。
2.主要函数2.1countH(state & st);countH函数功能是计算st状态的h值。
计算过程中将会用到rightPos数组,数组里记录的是目标状态下,0~9每个将牌在九宫格里的位置(位置 = 行下标 * 3 + 列下标)。
2.2f(state * p);f()=h()+level2.3look_up_dup(vector<state*> & vec, state * p);在open表或close表中,是否存在指定状态p,当找到与p完全相等的节点时,退出函数。
2.4search(state & start);在open表不为空时,按f值由小到大对open表中元素进行排序。
调用findZero()函数找到0值元素的位置。
空格可以向上下左右四个方向移动,前提是移动后不能越过九宫格的边界线。
确定某方向可走后,空格移动一步,生成状态p’。
此时,检查open表中是否已有p’,若有,更新p’数据;检查close表中是否已有p’,若有,将p’从close表中删除,添加到open表中。
重复的执行这个过程,直到某状态的h值为零。
2.5dump_solution(state * q);在终端输出解路径。
// A*算法八数码问题#include"stdafx.h"#include<iostream>#include<vector>#include<time.h>#include<algorithm>using namespace std;const int GRID = 3; //Grid表示表格的行数(列数),这是3*3的九宫格int rightPos[9] = { 4, 0, 1, 2, 5, 8, 7, 6, 3 };//目标状态时,若p[i][j]=OMG,那么3*i+j = rightPos[OMG]struct state{int panel[GRID][GRID];int level; //记录深度int h;state * parent;state(int level) :level(level){}bool operator == (state & q){//判断两个状态是否完全相等(对应位置元素相等),完全相等返回true,否则返回falsefor (int i = 0; i<GRID; i++){for (int j = 0; j<GRID; j++){if (panel[i][j] != q.panel[i][j])return false;}}return true;}state & operator = (state & p){ //以状态p为当前状态赋值,对应位置元素相同for (int i = 0; i<GRID; i++){for (int j = 0; j<GRID; j++){panel[i][j] = p.panel[i][j];}}return *this;}};void dump_panel(state * p){ //将八数码按3*3矩阵形式输出for (int i = 0; i<GRID; i++){for (int j = 0; j<GRID; j++)cout << p->panel[i][j] << " ";cout << endl;}}int countH(state & st){ //给定状态st,计算它的h值。
用A星算法解决八数码问题
A*算法解决八数码问题1 问题描述1.1什么是八数码问题×八数码游戏包括一个33的棋盘,棋盘上摆放着8个数字的棋子,留下一个空位。
与空位相邻的棋子可以滑动到空位中。
游戏的目的是要达到一个特定的目标状态。
标注的形式化如下:123456781.2问题的搜索形式描述状态:状态描述了8个棋子和空位在棋盘的9个方格上的分布。
初始状态:任何状态都可以被指定为初始状态。
操作符:用来产生4个行动(上下左右移动)。
目标测试:用来检测状态是否能匹配上图的目标布局。
路径费用函数:每一步的费用为1,因此整个路径的费用是路径中的步数。
现在任意给定一个初始状态,要求找到一种搜索策略,用尽可能少的步数得到上图的目标状态。
1.3解决方案介绍1.3.1 算法思想估价函数是搜索特性的一种数学表示,是指从问题树根节点到达目标节点所要耗费的全部代价的一种估算,记为f(n)。
估价函数通常由两部分组成,其数学表达式为f(n)=g(n)+h(n)其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解)的条件,关键在于估价函数h(n)的选取。
估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
如果估价值>实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
搜索中利用启发式信息,对当前未扩展结点根据设定的估价函数值选取离目标最近的结点进行扩展,从而缩小搜索空间,更快的得到最优解,提高效率。
1.3.2 启发函数进一步考虑当前结点与目标结点的距离信息,令启发函数h ( n )为当前8个数字位与目标结点对应数字位距离和(不考虑中间路径),且对于目标状态有h ( t ) = 0,对于结点m和n (n 是m的子结点)有h ( m ) – h ( n ) <= 1 = Cost ( m, n ) 满足单调限制条件。
采用A星算法实现八数码问题

人工智能实验一报告题目:采用A*算法解决八数码问题成员:李文、郭弯弯学号:、专业:计算机科学与技术完成日期: 2016/04/09一、实验要求、目的及分工1.1实验要求使用A*算法实现八数码问题,并用图形界面展示。
1.2实验目的a. 熟悉人工智能系统中的问题求解过程;b. 熟悉状态空间的盲目搜索和启发式搜索算法的应用;c. 熟悉对八数码问题的建模、求解及编程语言的应用。
1.3实验分工我们小组共两个人,共同查找背景资料,李文同学主要负责源代码,郭弯弯同学主要负责实验报告以及演示文稿的完成。
二、实验问题2.1问题描述所谓八数码问题是指这样一种游戏:将分别标有数字1,2,3,…,8 的八块正方形数码牌任意地放在一块3×3 的数码盘上。
放牌时要求不能重叠。
于是,在3×3 的数码盘上出现了一个空格。
现在要求按照每次只能将与空格相邻的数码牌与空格交换的原则,不断移动该空格方块以使其和相邻的方块互换,直至达到所定义的目标状态。
空格方块在中间位置时有上、下、左、右4个方向可移动,在四个角落上有2个方向可移动,在其他位置上有3个方向可移动,问题描述如下图所示:(a) 初始状态 (b) 目标状态图1 八数码问题示意图2.2问题解释首先,八数码问题包括一个初始状态(START) 和目标状态(TRAGET),所谓解决八数码问题就是在两个状态间寻找一系列可过渡状态:(START>STATE1>STATE2>...>TARGET )这个状态是否存在就是我们要解决的第一个问题;第二个问题是我们要求出走的路径是什么。
2.3八数码问题形式化描述初始状态:初始状态向量:规定向量中各分量对应的位置,各位置上的数字。
把3×3的棋盘写成一个二维向量。
我们可以设定初始状态:<1,5,2,4,0,3,6,7,8>后继函数:按照某种规则移动数字得到的新向量。
例如:<1,5,2,4,0,3,6,7,8> <1,0,2,4,5,3,6,7,8>路径耗散函数:规定每次移动代价为1,即每执行一条规则后总代价加1。
八数码问题C语言A星算法详细实验报告含代码
一、实验容和要求八数码问题:在3×3的方格棋盘上,摆放着1到8这八个数码,有1个方格是空的,其初始状态如图1所示,要求对空格执行空格左移、空格右移、空格上移和空格下移这四个操作使得棋盘从初始状态到目标状态。
例如:(a) 初始状态(b) 目标状态图1 八数码问题示意图请任选一种盲目搜索算法(广度优先搜索或深度优先搜索)或任选一种启发式搜索方法(全局择优搜索,加权状态图搜索,A算法或A* 算法)编程求解八数码问题(初始状态任选)。
选择一个初始状态,画出搜索树,填写相应的OPEN 表和CLOSED表,给出解路径,对实验结果进行分析总结,得出结论。
二、实验目的1. 熟悉人工智能系统中的问题求解过程;2. 熟悉状态空间的盲目搜索和启发式搜索算法的应用;3. 熟悉对八数码问题的建模、求解及编程语言的应用。
三、实验算法A*算法是一种常用的启发式搜索算法。
在A*算法中,一个结点位置的好坏用估价函数来对它进行评估。
A*算法的估价函数可表示为:f'(n) = g'(n) + h'(n)这里,f'(n)是估价函数,g'(n)是起点到终点的最短路径值(也称为最小耗费或最小代价),h'(n)是n到目标的最短路经的启发值。
由于这个f'(n)其实是无法预先知道的,所以实际上使用的是下面的估价函数:f(n) = g(n) + h(n)其中g(n)是从初始结点到节点n的实际代价,h(n)是从结点n到目标结点的最佳路径的估计代价。
在这里主要是h(n)体现了搜索的启发信息,因为g(n)是已知的。
用f(n)作为f'(n)的近似,也就是用g(n)代替g'(n),h(n)代替h'(n)。
这样必须满足两个条件:(1)g(n)>=g'(n)(大多数情况下都是满足的,可以不用考虑),且f必须保持单调递增。
(2)h必须小于等于实际的从当前节点到达目标节点的最小耗费h(n)<=h'(n)。
用A星算法解决八数码问题
A*算法解决八数码问题1 问题描述什么是八数码问题八数码游戏包括一个3×3的棋盘,棋盘上摆放着8个数字的棋子,留下一个空位。
与空位相邻的棋子可以滑动到空位中。
游戏的目的是要达到一个特定的目标状态。
标注的形式化如下:问题的搜索形式描述状态:状态描述了8个棋子和空位在棋盘的9个方格上的分布。
初始状态:任何状态都可以被指定为初始状态。
操作符:用来产生4个行动(上下左右移动)。
目标测试:用来检测状态是否能匹配上图的目标布局。
路径费用函数:每一步的费用为1,因此整个路径的费用是路径中的步数。
现在任意给定一个初始状态,要求找到一种搜索策略,用尽可能少的步数得到上图的目标状态。
解决方案介绍算法思想(估价函数是搜索特性的一种数学表示,是指从问题树根节点到达目标节点所要耗费的全部代价的一种估算,记为f(n)。
估价函数通常由两部分组成,其数学表达式为f(n)=g(n)+h(n)其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n 节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解)的条件,关键在于估价函数h(n)的选取。
估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
如果估价值>实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
搜索中利用启发式信息,对当前未扩展结点根据设定的估价函数值选取离目标最近的结点进行扩展,从而缩小搜索空间,更快的得到最优解,提高效率。
启发函数进一步考虑当前结点与目标结点的距离信息,令启发函数h ( n )为当前8个数字位与目标结点对应数字位距离和(不考虑中间路径),且对于目标状态有 h ( t ) = 0,对于结点m和n (n 是m的子结点)有h ( m ) – h ( n ) <= 1 = Cost ( m, n ) 满足单调限制条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、实验内容和要求八数码问题:在3×3的方格棋盘上,摆放着1到8这八个数码,有1个方格是空的,其初始状态如图1所示,要求对空格执行空格左移、空格右移、空格上移和空格下移这四个操作使得棋盘从初始状态到目标状态。
例如:图1 八数码问题示意图请任选一种盲目搜索算法(广度优先搜索或深度优先搜索)或任选一种启发式搜索方法(全局择优搜索,加权状态图搜索,A 算法或A* 算法)编程求解八数码问题(初始状态任选)。
选择一个初始状态,画出搜索树,填写相应的OPEN表和CLOSED表,给出解路径,对实验结果进行分析总结,得出结论。
二、实验目的1. 熟悉人工智能系统中的问题求解过程;2. 熟悉状态空间的盲目搜索和启发式搜索算法的应用;3. 熟悉对八数码问题的建模、求解及编程语言的应用。
三、实验算法A*算法是一种常用的启发式搜索算法。
在A*算法中,一个结点位置的好坏用估价函数来对它进行评估。
A*算法的估价函数可表示为:f'(n) = g'(n) + h'(n)这里,f'(n)是估价函数,g'(n)是起点到终点的最短路径值(也称为最小耗费或最小代价),h'(n)是n到目标的最短路经的启发值。
由于这个f'(n)其实是无法预先知道的,所以实际上使用的是下面的估价函数:f(n) = g(n) + h(n)其中g(n)是从初始结点到节点n的实际代价,h(n)是从结点n到目标结点的最佳路径的估计代价。
在这里主要是h(n)体现了搜索的启发信息,因为g(n)是已知的。
用f(n)作为f'(n)的近似,也就是用g(n)代替g'(n),h(n)代替h'(n)。
这样必须满足两个条件:(1)g(n)>=g'(n)(大多数情况下都是满足的,可以不用考虑),且f必须保持单调递增。
(2)h必须小于等于实际的从当前节点到达目标节点的最小耗费h(n)<=h'(n)。
第二点特别的重要。
可以证明应用这样的估价函数是可以找到最短路径的。
3.A*算法的步骤A*算法基本上与广度优先算法相同,但是在扩展出一个结点后,要计算它的估价函数,并根据估价函数对待扩展的结点排序,从而保证每次扩展的结点都是估价函数最小的结点。
A*算法的步骤如下:1)建立一个队列,计算初始结点的估价函数f,并将初始结点入队,设置队列头和尾指针。
2)取出队列头(队列头指针所指)的结点,如果该结点是目标结点,则输出路径,程序结束。
否则对结点进行扩展。
3)检查扩展出的新结点是否与队列中的结点重复,若与不能再扩展的结点重复(位于队列头指针之前),则将它抛弃;若新结点与待扩展的结点重复(位于队列头指针之后),则比较两个结点的估价函数中g的大小,保留较小g值的结点。
跳至第五步。
4)如果扩展出的新结点与队列中的结点不重复,则按照它的估价函数f大小将它插入队列中的头结点后待扩展结点的适当位置,使它们按从小到大的顺序排列,最后更新队列尾指针。
5)如果队列头的结点还可以扩展,直接返回第二步。
否则将队列头指针指向下一结点,再返回第二步。
四、程序框图五、实验结果及分析输入初始状态:2 8 3 目标状态: 1 2 31 6 4 8 0 47 0 5 7 6 5运行结果屏幕打印OPEN表与CLOSE表:OPEN CLOSE1 2 3 4 02 3 4 5 60 12 3 4 6 70 1 52 3 4 6 8 90 1 5 72 3 4 8 9 100 1 5 7 62 3 4 8 11 12 13 0 1 5 7 6 92 3 4 8 12 13 14 150 1 5 7 6 9 113 4 8 12 13 14 15 16 170 1 5 7 6 9 11 24 8 12 13 14 15 16 17 18 190 1 5 7 69 11 2 34 8 12 13 14 15 16 17 19 200 1 5 7 6 9 11 2 3 188 12 13 14 15 16 17 19 21 220 1 5 7 6 9 11 2 3 18 412 13 14 15 16 17 19 21 22 230 1 5 7 6 9 11 2 3 18 4 812 13 14 15 16 17 19 21 22 24 250 1 5 7 6 9 11 2 3 18 4 8 23 12 13 14 15 16 17 19 21 22 24 260 1 5 7 6 9 11 2 3 18 4 8 23 24发现26为目标节点六、结论对于八数码问题,BFS算法最慢,A*算法较快。
八数码问题的一个状态实际上是0~9的一个排列,对于任意给定的初始状态和目标,不一定有解,也就是说从初始状态不一定能到达目标状态。
因为排列有奇排列和偶排列两类,从奇排列不能转化成偶排列。
如果一个数字0~8的随机排列871526340,用F(X)表示数字X前面比它小的数的个数,全部数字的F(X)之和为Y=∑(F(X)),如果Y为奇数则称原数字的排列是奇排列,如果Y为偶数则称原数字的排列是偶排列。
因此,可以在运行程序前检查初始状态和目标状态的排序的奇偶行是否相同,相同则问题可解,应当能搜索到路径。
否则无解。
七、源程序及注释#include <iostream>#include <ctime>#include <vector>using namespace std;const int ROW = 3;const int COL = 3;const int MAXDISTANCE = 10000;const int MAXNUM = 10000;int abs(int a){if (a>0) return a;else return -a;}typedef struct _Node{int digit[ROW][COL];int dist; // 距离int dep; // 深度int index; // 索引值} Node;Node src, dest;vector<Node> node_v; // 储存节点bool isEmptyOfOPEN() { //判断Open表是否空for (int i = 0; i < node_v.size(); i++) {if (node_v[i].dist != MAXNUM)return false;}return true;}bool isEqual(int index, int digit[][COL]) { //判断节点是否与索引值指向的节点相同for (int i = 0; i < ROW; i++)for (int j = 0; j < COL; j++) {if (node_v[index].digit[i][j] != digit[i][j])return false;}return true;}ostream& operator<<(ostream& os, Node& node) {for (int i = 0; i < ROW; i++) {for (int j = 0; j < COL; j++)os << node.digit[i][j] << ' ';os << endl;}return os;}void PrintSteps(int index, vector<Node>& rstep_v) { //输出步骤rstep_v.push_back(node_v[index]);index = node_v[index].index;while (index != 0) {rstep_v.push_back(node_v[index]);index = node_v[index].index;}for (int i = rstep_v.size() - 1; i >= 0; i--)cout << "Step " << rstep_v.size() - i<< endl << rstep_v[i] << endl;}void Swap(int& a, int& b) { //交换int t;t = a;a = b;b = t;}void Assign(Node& node, int index) { //获取节点for (int i = 0; i < ROW; i++)for (int j = 0; j < COL; j++)node.digit[i][j] = node_v[index].digit[i][j];int GetMinNode() { //获取启发值最小的节点int dist = MAXNUM;int loc; // the location of minimize nodefor (int i = 0; i < node_v.size(); i++) {if (node_v[i].dist == MAXNUM)continue;else if ((node_v[i].dist + node_v[i].dep) < dist) {loc = i;dist = node_v[i].dist + node_v[i].dep;}}return loc;}bool isExpandable(Node& node) { //判断是否可扩展for (int i = 0; i < node_v.size(); i++) {if (isEqual(i, node.digit))return false;}return true;}int Distance(Node& node, int digit[][COL]) { //计算距离int distance = 0;bool flag = false;for(int i = 0; i < ROW; i++)for (int j = 0; j < COL; j++)for (int k = 0; k < ROW; k++) {for (int l = 0; l < COL; l++) {if (node.digit[i][j] == digit[k][l]) {distance += abs(i - k) + abs(j - l);flag = true;break;}elseflag = false;}if (flag)break;}return distance;int MinDistance(int a, int b) { //二者取小return (a < b ? a : b);}void ProcessNode(int index) { //展开节点int x, y;bool flag;for (int i = 0; i < ROW; i++) {for (int j = 0; j < COL; j++) {if (node_v[index].digit[i][j] == 0) {x =i; y = j;flag = true;break;}else flag = false;}if(flag)break;}Node node_up; //上移操作Assign(node_up, index);int dist_up = MAXDISTANCE;if (x > 0) {Swap(node_up.digit[x][y], node_up.digit[x - 1][y]);if (isExpandable(node_up)) {dist_up = Distance(node_up, dest.digit);node_up.index = index;node_up.dist = dist_up;node_up.dep = node_v[index].dep + 1;node_v.push_back(node_up);}}Node node_down; //下移操作Assign(node_down, index);int dist_down = MAXDISTANCE;if (x < 2) {Swap(node_down.digit[x][y], node_down.digit[x + 1][y]);if (isExpandable(node_down)) {dist_down = Distance(node_down, dest.digit);node_down.index = index;node_down.dist = dist_down;node_down.dep = node_v[index].dep + 1;node_v.push_back(node_down);}}Node node_left;//左移操作Assign(node_left, index);int dist_left = MAXDISTANCE;if (y > 0) {Swap(node_left.digit[x][y], node_left.digit[x][y - 1]);if (isExpandable(node_left)) {dist_left = Distance(node_left, dest.digit);node_left.index = index;node_left.dist = dist_left;node_left.dep = node_v[index].dep + 1;node_v.push_back(node_left);}}Node node_right; //右移操作Assign(node_right, index);int dist_right = MAXDISTANCE;if (y < 2) {Swap(node_right.digit[x][y], node_right.digit[x][y + 1]);if (isExpandable(node_right)) {dist_right = Distance(node_right, dest.digit);node_right.index = index;node_right.dist = dist_right;node_right.dep = node_v[index].dep + 1;node_v.push_back(node_right);}}node_v[index].dist = MAXNUM;}int main() {int number;cout << "输入初始状态:" << endl;for (int i = 0; i < ROW; i++)for (int j = 0; j < COL; j++) {cin >> number;src.digit[i][j] = number;}src.index = 0;src.dep = 1;cout << "输入目标状态" << endl;for (int m = 0; m < ROW; m++)for (int n = 0; n < COL; n++) {cin >> number;dest.digit[m][n] = number;}node_v.push_back(src);while (1) {if (isEmptyOfOPEN()) {cout << "找不到解!" << endl;return -1;}else {int loc; // the location of the minimize node loc = GetMinNode();if(isEqual(loc, dest.digit)) {vector<Node> rstep_v;cout << "初始状态:" << endl;cout << src << endl;PrintSteps(loc, rstep_v);cout << "成功!" << endl;break;}elseProcessNode(loc);}}return 0;}。