拉杆式线位移传感器校准系统
MTC拉杆式磁致伸缩位移传感器
MTC拉杆式磁致伸缩位移传感器
磁致伸缩位移传感器是一种高精度,低迟滞,非接触,高寿命的一种传感器,MTC通用拉杆磁致伸缩位移传感器系列,有效行程75mm~1250mm,两端均有5mm缓冲行程,有电压、电流、RS485输出。
外壳表面阳极处理,防腐蚀;内置进口波导丝作为测量单元,经DSP数字信号处理,
精度高,无温漂,无接触,寿命长达二十年;可以适用在大多数应用场合;拉杆球头具有0.5mm自动对中功能,允许极限运动速度为
10m/s。
MTC详细参数
1、有效行程规格(mm):75、100、110、125、150、175、200、225、250、2 75、300、325、350、375、400、425、450、475、500、550、600、650、700、75 0、800、850、900、950、1000、1150、1250;
2、机械行程(mm):有效行程+10mm(每端缓冲5mm)
3、输出型式:三线电流型、电压型、RS485
4、出线型式:直接出线、五芯航空插头
5、独立线性精度(%):0.05(输出电流型、RS485);0.05(电压型)
6、解析度:0.002%FS;
7、防护等级:IP68
8、最大工作速度:10m/s;
9、使用温度范围:-40~80Cº
10、尺寸:A=有效行程+129mm
11、安装尺寸:见图
MTC图
MTC图
收藏此信息。
试验机位移检定方法

试验机位移检定方法试验机位移检定方法一、背景介绍在工程领域中,试验机是一种重要的设备,用于测量物体的力学性能。
而位移检定是评估试验机性能的关键步骤之一。
本文将详细说明几种常用的试验机位移检定方法。
二、方法一:光栅尺检定法1.原理:光栅尺是一种高精度的位移传感器,通过测量光栅间的位移来获取被测物体的位移值。
该方法通过在试验机上安装光栅尺,并与计算机连接,利用计算机软件读取光栅尺的数值,从而实现试验机位移检定。
2.步骤:–安装光栅尺在试验机上的移动部件,如拉杆或拉压板。
–连接光栅尺与计算机,并安装相应的驱动程序和数据采集软件。
–在试验机上施加一系列位移,并记录光栅尺所测得的数值。
–将记录的数值与实际的位移值进行比较,评估试验机的位移准确度。
三、方法二:位移传感器检定法1.原理:位移传感器是一种常用的位移测量设备,如电阻应变片、压电传感器等。
通过测量传感器的电阻、电压或电流等信号来获得被测物体的位移值。
2.步骤:–安装位移传感器在试验机上的移动部件,与计算机连接。
–根据传感器类型,设置相应的测量电路和参数。
–施加一系列位移,并记录传感器所测得的信号数值。
–将记录的数值与实际的位移值进行比较,评估试验机的位移准确度。
四、方法三:比较试验法1.原理:该方法是通过将试验机与参考设备(如标准试验机)进行比较,评估试验机的位移准确度。
常用的参考设备包括机械比较器、光学测量设备等。
2.步骤:–将被测试验机与参考设备放置在相同的环境条件下。
–同时施加相同的位移,并记录两个设备的位移值。
–将两个设备测得的位移值进行比较,评估试验机的位移准确度。
五、方法四:数学模型法1.原理:该方法基于试验机的力学特性建立数学模型,通过模拟计算得到位移值,并与实际测得的位移值进行比较。
2.步骤:–根据试验机的力学特性建立数学模型,并进行参数辨识。
–施加一系列位移,并根据模型计算得到理论位移值。
–将模型计算的位移值与实际测得的位移值进行比较,评估试验机的位移准确度。
拉线位移传感器原理
拉线位移传感器原理
拉线位移传感器是一种测量线性位移的装置。
它基于拉力原理,通过测量受力物体上的拉力来确定物体的位移。
该传感器由两个主要部分组成:一个固定的支撑结构和一个可移动的测量物体。
支撑结构通常由坚固的材料制成,并能够承受一定的拉力。
测量物体通常是一个绳子、电缆或者弹簧等。
当外力作用于测量物体时,它会发生位移,从而引起测量物体与支撑结构之间的拉力变化。
当测量物体发生位移时,它上面施加的拉力也会相应变化。
拉线位移传感器通过测量这个拉力的大小来确定位移的大小。
一种常用的测量方法是使用应变片,它可以将拉力转化为电信号。
应变片通常固定在测量物体的一侧,当物体发生拉伸时,应变片也会发生形变,从而改变电阻值。
通过测量电阻值的变化,可以确定物体的位移。
另一种常用的测量方法是使用光电传感器。
在测量过程中,测量物体上通常会安装一个反光标记。
光电传感器会发射一束光束,当光束照射到反光标记上时,会被反射回传感器。
通过检测反射光的强度变化,可以确定物体的位移大小。
拉线位移传感器具有简单、灵敏、可靠等优点,广泛应用于工业自动化、机械制造和航天航空等领域。
它能够精确测量物体的位移,并将其转化为电信号输出,方便与其他设备进行数据处理和控制。
直线位移传感器的工作原理

直线位移传感器的工作原理
直线位移传感器又称电阻尺,碳膜尺,电子尺,其原理很简单,通常将可变的电阻滑轨定置在传感器固定的部位,通过电刷滑动来改变碳膜尺的阻值从而得到需要的阻值。
传感器的滑轨连接发生直流电压,其中通过微安培的电流,在移动的同时与滑片长度成为正比。
直线位移传感器主要是由电刷组件、电气连接、轴承、阻轨、电阻元件、外壳(经过阳极氧化铝)组成,其中内置导电塑料测量单元寿命长无温漂,外壳表面经过阳极处理是可以防腐蚀的,一般两端都有一点缓冲的行程。
参数为电气参数、机械参数、环境参数,具体参数详细如下:
电气参数:工作量程、电气行程、标准阻值、独立线性度、可重复性、滑刷工作电流、致故障时滑刷的最大电流、允许的最大工作电压、输出电压-输入、电压的有效温度系数比、绝缘电阻、绝缘强度。
机械参数:外壳长度、机械行程、总重、滑动部件的重量、球铰允许移量、工作受力、水平方向、垂直方向。
环境参数:温度范围、抗震动指标、抗冲击指标、使用寿命、工作速度、运行加速度、防护等级。
直线位移传感器又分为拉杆式、滑块式、自恢复式、铰接式,但是它们的原理其实都是一样的,只是每种的安装方式不一样,所以在选择产品的时候必须根据自身的安装环境在选择,它的应用范围主要的适用于木工机械、印刷机器、机器人位置控制、工程监测电脑控制运动机械系统、注塑机专用机械等需要准确测量位移的重要场合。
拉杆式如下图:
滑块式如下图:
自恢复式如下图:
铰接式如下图:。
拉杆式线位移传感器校准系统

拉杆式线位移传感器校准系统【摘要】针对现有的拉杆式线位移传感器校准速度慢、周期长、工作量大、精度低等弊端,研制出一种基于光电检测技术的线位移传感器自动校准系统。
该系统采用伺服电机驱动精密直线运动机构,由光栅传感器实时检测运动滑座的位移,作为线位移传感器的标准位移输入。
同时,校准系统检测线位移传感器的电压输出,根据这两者间的输入输出关系确定拉杆式线位移传感器的灵敏度、线性度、重复度等特性参数。
整个校准过程由计算机控制,从而实现了对拉杆式线位移传感器的自动校准。
分析结果表明,该校准系统能够解决工业现场拉杆式线位移传感器校准问题,实现了校准过程的自动化、快速化与高精度。
【关键词】拉杆式线位移传感器;校准系统;光栅传感器;不确定度分析1.引言拉杆式线位移传感器是通过拉杆感受长度尺寸变化并转换成可用输出信号的器件,它是线位移传感器中最常见的一种,可用于测量位移、距离、位置和应变量等长度尺寸。
拉杆式线位移传感器在机械制造业和工业自动检测领域中占有重要地位,广泛应用于电力、水利、建筑、航空航天、公路铁路交通等多个行业的测试任务。
为保证传感器使用的可靠性和测量精度,根据国标规定需要对灵敏度、基本误差、线性度、回程误差和重复性等主要计量特性做定期校准[1,2]。
目前,国内外常用的线位移传感器校准方法是通过万工显[3]、测长机[4]、激光干涉仪[5,6]等仪器设备提供标准位移,由线位移传感器对该标准位移量进行检测,得到线位移传感器的输入-输出关系,进而实现传感器的校准。
激光干涉仪虽具有较高的测量精度,但校准机构复杂、成本高,且对测量环境的要求高,主要用于精度要求特别高的线位移传感器校准。
采用万工显、测长机等设备进行校准,校准过程以手工操作为主,校准精度和效率都不高。
并且,现有研究成果主要侧重于理论和实验方法的研究,未能形成标准化的设备,而市场上目前也没有合适的专用校准系统。
为此,本文提出一种基于光栅传感器的拉杆式线位移传感器自动快速校准方法,并研制出校准系统,实现了拉杆式线位移传感器的高精度自动校准。
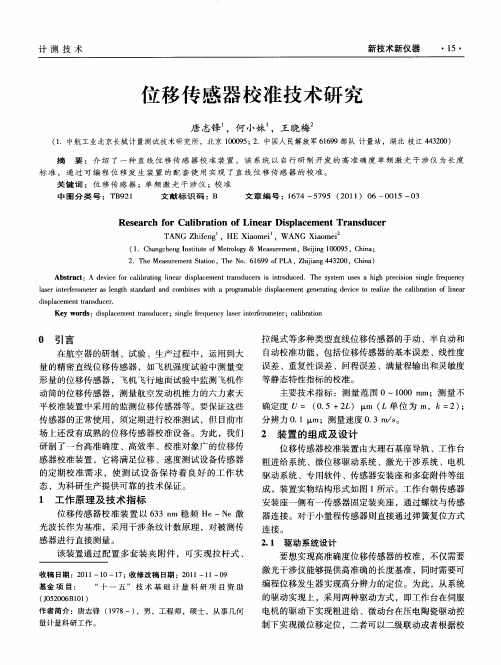
位移传感器校准技术研究
· 16· 新 技术新 仪器
2011年 第 31卷 第 6期
图 1 位移传感器校准装置
准 需要 单独定 位 ,从而 实现不 同 准确度 级别 的位移 传
感 器 的校准 。数据 采集 卡在 工作 台运动 过程 中可按 照
要 求不 断 同步读取 干涉 仪及 被测传 感器 读数值 ,实现
图 2 李 沙 育 圆调 整 监 控
1 工 作 原 理 及 技 术 指 标 位 移传 感器 校 准 装 置 以 633 nm稳 频 He—Ne激
光波长作为基准,采用干涉条纹计数原理 ,对被测传 感 器进 行 直接测 量 。
该 装 置通 过 配 置多 套 装 夹 附 件 ,可 实 现 拉 杆式 、
收 稿 日期 :2011—10—17;收 修 改稿 日期 :2011—11—09 基金 项 目: “十 一 五 ” 技 术 基 础 计 量 科 研 项 目 资 助 (J052006B101) 作者简 介 :唐 志锋 (1978一),男 ,工程 师 ,硕: ,从事 几何 量计量科研工作 。
KTC拉杆系列参数表
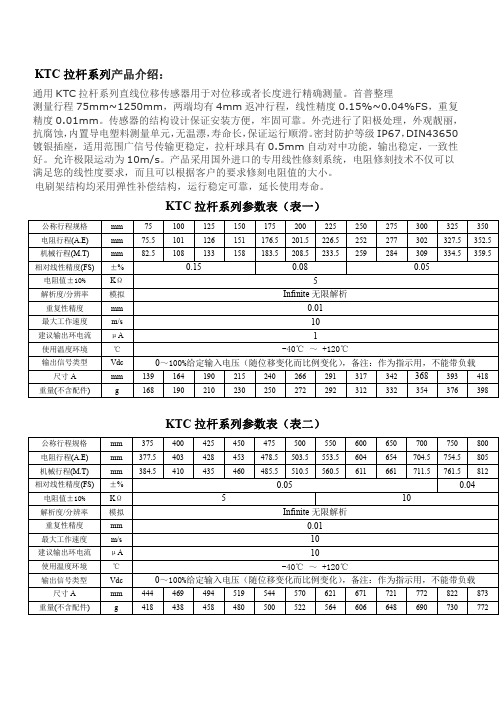
KTC拉杆系列产品介绍:通用KTC拉杆系列直线位移传感器用于对位移或者长度进行精确测量。
首普整理测量行程75mm~1250mm,两端均有4mm返冲行程,线性精度0.15%~0.04%FS,重复精度0.01mm。
传感器的结构设计保证安装方便,牢固可靠。
外壳进行了阳极处理,外观靓丽,抗腐蚀,内置导电塑料测量单元,无温漂,寿命长,保证运行顺滑。
密封防护等级IP67,DIN43650镀银插座,适用范围广信号传输更稳定,拉杆球具有0.5mm自动对中功能,输出稳定,一致性好。
允许极限运动为10m/s。
产品采用国外进口的专用线性修刻系统,电阻修刻技术不仅可以满足您的线性度要求,而且可以根据客户的要求修刻电阻值的大小。
电刷架结构均采用弹性补偿结构,运行稳定可靠,延长使用寿命。
KTC拉杆系列参数表(表一)公称行程规格mm 75 100 125 150 175 200 225 250 275 300 325 350 电阻行程(A.E) mm 75.5 101 126 151 176.5 201.5 226.5 252 277 302 327.5 352.5 机械行程(M.T) mm 82.5 108 133 158 183.5 208.5 233.5 259 284 309 334.5 359.5 相对线性精度(FS) ±% 0.15 0.08 0.05电阻值±10%KΩ 5解析度/分辨率模拟Infinite无限解析重复性精度mm 0.01最大工作速度m/s 10建议输出环电流μA 1使用温度环境℃-40℃ ~ +120℃输出信号类型Vdc 0~100%给定输入电压(随位移变化而比例变化),备注:作为指示用,不能带负载尺寸A mm 139 164 190 215 240 266 291 317 342 368 393 418 重量(不含配件) g 168 190 210 230 250 272 292 312 332 354 376 398KTC拉杆系列参数表(表二)公称行程规格mm 375 400 425 450 475 500 550 600 650 700 750 800 电阻行程(A.E) mm 377.5 403 428 453 478.5 503.5 553.5 604 654 704.5 754.5 805 机械行程(M.T) mm 384.5 410 435 460 485.5 510.5 560.5 611 661 711.5 761.5 812 相对线性精度(FS) ±% 0.05 0.04 电阻值±10%KΩ 5 10解析度/分辨率模拟Infinite无限解析重复性精度mm 0.01最大工作速度m/s 10建议输出环电流μA 10使用温度环境℃-40℃ ~ +120℃输出信号类型Vdc 0~100%给定输入电压(随位移变化而比例变化),备注:作为指示用,不能带负载尺寸A mm 444 469 494 519 544 570 621 671 721 772 822 873 重量(不含配件) g 418 438 458 480 500 522 564 606 648 690 730 772KTC拉杆系列参数表(表三)公称行程规格mm 850 900 950 1000电阻行程(A.E) mm 855 905.5 955.5 1006机械行程(M.T) mm 862 912.5 962.5 1013相对线性精度(FS) ±% 0.04电阻值±10%KΩ10解析度/分辨率模拟Infinite无限解析重复性精度mm 0.01最大工作速度m/s 10建议输出环电流μA 10使用温度环境℃-40℃ ~ +120℃输出信号类型Vdc 0~100%给定输入电压(随位移变化而比例变化),备注:作为指示用,不能带负载尺寸A mm 923 974 1024 1075重量(不含配件) g 812 854 894 936附1:安装尺寸图附2:外观图。
深浦LA位移传感器手册
深浦LA位移传感器手册一、概述深浦LA位移传感器是一种以电压输出与轴旋转角度或轴直线位移为线性关系的位移量传感器。
其特点是精度高、寿命长、输出平滑性好。
可用于位置反馈、位置检测、电平调节等检测与控制系统,是一种理想的精密角位移、直线位移传感器。
深浦LA位移传感器结构主要由导电塑料基体、电刷(片)、随动轴、壳体等组成。
角位移传感器有单联、双联二种。
其电信号引出一般均采用接线柱形式。
直线位移传感器的电信号引出采用标准航空接头(WDL系列、WDL—B系列)和插接式接头(WDL—M系列)形式。
二、安装及使用方法:拉杆式位移传感器可以任意方向安装,首先将传感器壳体放在参照物(基准)的安装支架孔里,使传感器壳体和被测物移动的方向保持一致,根据传感器的量程,估算大致的间隙,然后用镙母将拉杆和被测物固定起来,通上电源等传感器稳定下来,再慢慢的移动传感器壳体,使传感器的输出零位对应于被测物机械零位,然后将传感器壳体夹紧(不可松动),安装好就可以通过计算机数据采集对被测物的位移进行检测或监测或PUC进行系统控制,回弹式位移传感器和拉杆式位移传感器安装基本相似。
三、订货须知:首先将位移传感器的量程确定下来,根据使用情况可以适当放一点余量,并将零点方向在定货中注明,再根据系统的误差要求选择适当的测量精度,另外请务必告之供电电压,我们可供选择的供电方式有: 6V 12V 24V t9V +12V +15V 220VAC (需要配接二次仪表),输出方式也有输出电压: 0—5V 0—10V 0—+5V 0—+10V输出电流: 0— 10mA 0—20mA 4 20mA,如果您要进行动态测量,请把机械频率的范围在定货中列出来。
如果系统需要在高压场合中使用,可以采用选进的全不绣钢密封焊接,耐高压0—50 MPa,对温度要求比较高,我公司的位移传感器经过特殊工艺处理可以在—40C— 200C环境中正常工作。
四、使用注意事项:1、安装传感器时注意别让铁芯和测杆受大的测向力而造成变形弯曲,否则会胆重影响测杆活动的灵活性。
线位移传感器动态参数校准规范
线位移传感器动态参数校准规范1 范围本校准规范规定了对线位移传感器实验室环境下的动态参数进行校准的计量特性、校准条件、校准项目、校准方法、校准结果的处理及复校时间间隔。
本校准规范适用于新制造(或购置)、使用中、修理后的线位移传感器动态参数校准。
2 引用文件本校准规范引用下列技术条件JJF 1001-2011 通用计量术语及定义技术规范。
JJF 1059.1-2012 测量不确定度评定与表示。
JJF 1094-2002 测量仪器特性评定。
GB/T 7665-2005 传感器通用术语。
GB/T 30111-2013 位移传感器通用规范。
GB/T 18459-2001 传感器主要静态性能指标的计算方法。
GJB 8137-2013 位移传感器标定与精度测试方法。
JJF 1305-2011 线位移传感器校准规范。
注:凡是注日期的引用文件,仅注日期的版本适用于本规范;凡是不注日期的引用文件,其最新版本(包括所有的修改版)适用于本规范。
3 术语和计量单位3.1 术语3.1.1 线位移传感器linear displacement sensor能够感受长度尺寸变化并转换为可用输出信号的器件。
3.1.2 动态特性dynamic characteristic与响应于被测量随时间变化有关的传感器特性。
3.1.3 动态示值误差dynamic error of indication线位移传感器示值与对应输入量的真值之差。
3.1.4 动态重复性dynamic repeatability在相同测量条件下,对同一被测量进行连续多次测量所得结果之间的一致性。
3.1.5 分辨力resolution线位移传感器能够有效辨别的最小位移量。
3.1.6 响应时间response time由被测量的阶跃变化引起的传感器输出上升到其最终规定百分率时所需要的时间。
注:为注明这种百分率,可将其置于主词前面,例如:98%响应时间。
3.1.7 频率响应frequency response在规定的被测量频率范围内,对加在传感器上的正弦变化的被测量来说,输出量与被测量振幅之比及输出量和被测量之间相差随频率的变化。
位移传感器的使用注意事项
不能接错位移传感器的三条线,1#、3#线是电源线,2#是输出线除1#、3#线电源线可以调换外,2#线只能是输出线。
上述线一旦接错,将出现线性误差大,控制精度差,容易显示跳动等现象。
如果出现控制非常困难,就应该怀疑是接错线。
安装对中性要好,角度容许±12°误差,平行度偏差容许±0.5mm,是指某一误差,如果角度误差和平行度误差都偏大,就会导致显示数字跳动。
在这种情况下,一般可以用万用表的电压档测出电压的波动。
一定要作角度和平行度的调整。
请特别注意:在现场将电子尺的铝合金支架更换成不锈钢支架后,同时应将拉杆牵引安装位升高2 mm。
否则,接地问题解决了,又形成了不对中的问题,必须同时解决。
供电电源要有足够的容量,如果电源容量太小,容易发生如下情况:合模运动会导致射胶电子尺显示跳动,或熔胶运动会导致合模电子尺的显示波动。
特别是电磁阀驱动电源于电子尺供电电源在一起时容易出现上述情况,严重时可以用万用表的电压档测量到电压的波动。
如果在排除了静电干扰、高频干扰、对中性不好的情况下仍不能解决问题,也可以怀疑是电源的功率偏小。
对于使用时间很久的电子尺,由于前期产品无密封,可能有很多杂质,并有油、水混合物,影响电刷的接触电阻,导致显示数字跳动,可以认为是电子尺本身的早期损坏。
电子尺显示故障的处理简单。
设备上只要一只数字式万用表,一段电线即可,只要综合分析,判断问题和解决问题不是困难。
不能有外界的干扰,包括静电干扰和高频干扰。
因此,设备的强电线路与电子尺的信号线应分开线槽。
位移传感器应使用强制接地支架,且使电子尺外壳(可测量端盖螺丝与支架之间的电阻,应小于1ω电阻)良好接地,信号线应使用屏蔽线,且在电箱的一端应予将屏蔽线接地或接直流电源负极。
静电干扰时,一般万用表的电压测量非常正常,但就是显示数字跳动;高频干扰时其现象也一样。
验证是不是静电干扰,用一段电源线将电子尺的封盖螺丝与机器上某一点金属短接即可,只要一短接,静电干扰立即消除。
直线位移传感器原理及使用方法一览

直线位移传感器原理及使用方法一览一、直线位移传感器的原理1.光电原理:基于光电传感器检测光强度的变化,通过测量光电元件的输出信号来确定位移的原理。
当光电元件之间的距离发生变化时,光强度会发生改变,从而生成一个与位移相关的电信号。
2.电容原理:基于两个电容器之间的电容值随位移改变而改变的原理。
两个电容器之间设置一个可移动的物体,当物体位移时,两个电容器之间的距离发生变化,电容值也会发生变化,从而产生一个与位移相关的电信号。
3.电感原理:基于线圈之间的电感值随位移改变而改变的原理。
测量线圈的电感值可以确定位移的大小。
当测量物体位移时,线圈的电感值会发生变化,从而产生一个与位移相关的电信号。
4.电阻原理:基于调节传感器的电阻值来确定位移的原理。
传感器内部有一个电阻元件,位移时通过调节电阻元件的值来测量位移的大小。
5.压电原理:基于压电材料的压电效应来测量位移的原理。
压电材料在力的作用下会产生电荷,通过测量压电材料上产生的电荷来确定位移的大小。
以上是一些常见的直线位移传感器原理,根据具体的应用需求可以选择不同的传感器。
二、直线位移传感器的使用方法1.安装位置选择:根据需要测量的位移范围和测量精度要求,选择合适的安装位置。
通常,传感器要与被测量物体之间有一定的间隙,以免物体碰到传感器造成损坏。
2.传感器安装:将传感器固定在安装位置上,确保传感器与被测量物体之间的相对位置稳定不变。
3.连接传感器:根据传感器的接口和信号输出方式,选择合适的连接线缆,并正确连接到测量系统。
4.校准传感器:在使用前要对传感器进行校准,以确保测量的准确性。
校准的方式可以是在已知位移的情况下对传感器进行调整,或者通过与其他已校准的传感器进行比较。
5.数据采集与处理:通过连接到计算机、显示器或其他数据采集设备,获取传感器输出的电信号,并将其转换为位移值。
可以使用数据采集软件对位移数据进行存储、分析和处理。
6.维护与保养:定期检查传感器的工作状态,确保传感器没有损坏或松动。
KTC拉杆式直线位移传感器使用说明书

防护等级 :IP67; 最大工作速度: ≤10m/s; 使用寿命: 50X106次电气接线方式:机械安装:一、电子尺的安装宜将余量均匀留在两端,未确定极限位置之前不要锁紧固定支架螺丝,待调整行程后才能锁紧电子尺固定支架螺丝。
二、拉杆式电子尺的拉球万向头允许半径1mm 的对中性偏差,当然规格越短,建议对中偏差越小。
三、固定电子尺后,将拉杆(KTC 、KTM 系列均适用)缩回时,万向球头的圆柱本体应能在四个径向方位有空隙。
否则,调整万向头安装位或调整靠近伸出端的安装支架位。
四、在拉杆拉出时如有很大的不对中,应调整靠近插头那端的安装支架。
这可作为一种辅助复查方式。
五、拉球万向头安装杆与拉杆允许角度±12º的倾斜。
但如果安装时对中偏差和倾斜偏差同时都很大将会影响电子尺的稳定性和使用寿命。
应予以进一步调整。
六、滑块电子尺可以减少调整对中性的工作量,但辅助加长杆不能取消,否则,会出现由于对中性不好而导致稳定性和使用寿命,甚至当即致使电子尺失效。
七、一切调整好后,紧固安装螺丝,力度应使接地电阻小于1Ω为宜。
用万用表200Ω档位测量电子尺封盖螺丝与安装支架之间的电阻。
八、使用四线制或带有屏蔽线的配线,电子尺那端接地端应连接,同时将第四端或屏蔽线在电控箱端可靠接地。
Items 型号 KTC线性精度(±%FS) ≤0.05%电阻 ±5% 5.0重复性精度 0.01mm解析度 本质无穷温度系数 ≤1.5ppm/℃工作电压 ( For 5K Ω~20K Ω): ≤24V环境温度 -30~+125℃负载特性 ≥1K Ω输出类型(电压) 0-给定输入工作电压(随位移变化而变化)尺寸 B (mm) 有效行程尺寸 A (mm)有效行程+80 KTC 电子尺使用说明书 标准技术参数:。
直线位移传感器的接线方法【详解】
机械行业中,位移传感器是用于测量机电设备执行机构中的机械运动和位移,并将其转换为电信号,而基于滑动电位计设计的直线位移传感器是位移传感器中结构最简单、原理最简单的高精度位移测量用电子元器件。
直线位移传感器的内部构造类似于滑动变阻器,在使用中也常用作分压电位器使用。
那么直线位移传感器的接线方法是怎样的呢?下面小编就来为大家介绍。
1.直线位移传感器的装置宜将余量均匀留在两头,未确定极限方位之前不要锁紧固定支架螺丝,待调整行程后才干锁紧直线位移传感器固定支架螺丝。
2.拉杆式直线位移传感器的拉球万向头答应半径1mm的对中性误差,当然标准越短,主张对中误差越小。
3.固定直线位移传感器后,将拉杆(STC、STM系列均适用)缩回时,万向球头的圆柱本体应能在四个径向方位有空地,不然,调整万向头装置位或调整接近伸出端的装置支架位。
4.在拉杆拉出时如有很大的不对中,应调整接近插头那端的装置支架,这可作为一种辅助复查方法。
5.拉球万向头装置杆与拉杆答应视点±12的歪斜,但假如装置时对中误差和歪斜误差一起都很大,将会影响直线位移传感器的稳定性和运用寿命,应予以进一步调整。
6.滑块直线位移传感器能够削减调整对中性的工作量,但辅佐加长杆不能取消,不然,会呈现因为对中性欠好而致使稳定性和运用寿命,乃至当即致使直线位移传感器失效。
7.全部调整好后,紧固装置螺丝,力度应使接地电阻小于1Ω为宜,用万用表200Ω档位丈量直线位移传感器封盖螺丝与装置支架之间的电阻。
8.运用四线制或带有屏蔽线的配线,直线位移传感器那端接地端应衔接,一起将第四端或屏蔽线在电控箱端牢靠接地。
9.不能接错直线位移传感器(电子尺)的三条线,1#、3#线是电源线,2#是输出线除1#、3#线电源线可以调换外,2#线只能是输出线。
上述线一旦接错,将出现线性误差大,控制精度差,容易显示跳动等现象。
如果出现控制非常困难,就应该怀疑是接错线。
10.直线位移传感器(俗称电子尺),供电电压一般在5V—36V为宜,不要超过36V,否则容易烧坏线。
拉杆式位移传感器工作原理

拉杆式位移传感器工作原理
拉杆式位移传感器是一种常用的测量设备,用于测量物体的位移或变形。
其工作原理如下:
1.拉杆:拉杆是位移传感器的主要测量部分,一端连接到被测
物体上,另一端连接到传感器的机械结构上。
2.电感线圈:拉杆上装有一个线圈,称为电感线圈。
当拉杆发
生位移时,电感线圈的位置也会变化。
3.磁铁:电感线圈的周围有一个磁铁。
当拉杆发生位移时,磁
铁也会随之移动。
4.电感耦合:拉杆上的电感线圈和磁铁的相对位移会导致电感
的变化。
拉杆位移较小时,其电感值会发生微弱的变化。
5.电路测量:传感器中连接有一个电路,用来测量电感的变化。
该电路可以将电感的变化转换为电压信号或其他形式的输出信号。
通过测量电感的变化,可以间接获得拉杆的位移信息。
通常情况下,拉杆式位移传感器具有高精度和高灵敏度,并可以广泛应用于工业自动化、机械测试等领域。
常见位移传感器的使用方法和注意事项

常见位移传感器的使用方法和注意事项随着传感器应用领域的不断扩大,人们对其的需求也在逐渐加大,与此同时,对传感器的自身质量与性能就有了更高的要求,尤其是作为精确测试的位移传感器。
对于应用位移传感器来做研发的朋友来说,了解位移传感器使用方法及注意事项是十分必要的。
位移传感器的主要特性参数标称阻值:电位器上面所标示的阻值。
允许误差:标称阻值与实际阻值的差值跟标称阻值之比的百分数称阻值偏差,它表示电位器的精度。
允许误差一般只要在±20%以内就符合要求,因为一般位移传感器是以分压的方式来使用,具体电阻的大小对传感器的数据采集没有影响.线性精度:直线性误差.此参数越小越好.寿命:导电塑料位移传感器都在200万次以上.重复精度:此参数越小越好.分辨率:位移传感器所能反馈的最小位移数值.此参数越小越好.导电塑料位移传感器分辨率为无穷小.位移传感器的使用方法:一般采用给位移传感器加上一个电压,利用其优良的平滑性,来检测输出电压(输出电阻改变输出电压)分压比。
(1)直线位移传感器的使用:美国TOM公司生产的精密直线位移传感器,是带有一个长的持续传导轨迹分压计型传感器,在控制和测量运用中,适合于绝对位移传感,其线性精度为士0.05%。
具有移动快,寿命长等特点,符合龙门式精密油压机的控制要求。
根据实际要求在油压机的主缸、液压垫上分别安装Kl下滑板式、KTC拉杆式直线位移传感器。
在一个半自动工作过程中,油压机的主缸、液压垫分别带动两只直线位移传感器移动,将采集到的两点模拟量值输入到FX2N-8AD,FX2N-8AD将此模拟输入数值(此时是电压输入),转换成数字值,并且把他们传输到PLC主单元。
主缸、液压垫选用直线位移传感器的有效测量长度为500mm、400mm。
磁致伸缩位移传感器使用中的注意事项:磁致伸缩位移(液位)传感器,通过内部非接触式的测控技术精确地检测活动磁环的绝对位置来测量被检测产品的实际位移值的;该传感器的高精度和高可靠性已被广泛应用于成千上万的实际案例中根据供应商提供的资料,强调了本传感器在使用中必须注意的一些事项,除了上面所介绍的接线方面之外,在与液压油缸的装配中也有一些需要注意的问题:一是装配部位的加工尺寸,按照下图的公差要求加以控制。
线位移传感器动态参数校准规范
线位移传感器动态参数校准规范线位移传感器是一种广泛应用于工业自动化和测量领域的传感器设备,用于测量物体的位移或变形。
为了确保传感器的准确度和可靠性,对其进行动态参数校准是非常重要的。
下面将介绍线位移传感器动态参数校准的规范和步骤。
一、校准前准备工作1.确定校准仪器和设备:选择合适的仪器和设备,如信号发生器、精准的行程测量装置等。
2.检查传感器:确保传感器没有损坏或松动,并仔细检查其外观、电缆和连接器等是否完好。
3.清洁传感器:使用合适的清洁剂和软毛刷清洁传感器,确保传感器表面干净,无灰尘或污垢。
二、校准步骤1.建立基准线:使用已知精度的测量仪器(如光栅尺或标准行程传感器)建立基准线,作为校准的依据。
2.设置测量参数:根据实际需求,设置合适的测量参数,如量程、采样频率等。
3.连接传感器:将传感器连接到校准仪器上,并确保连接器牢固可靠,无松动或接触不良。
4.发送信号:通过信号发生器发送一系列标准信号到传感器,包括不同幅值和频率的信号。
5.记录测量数据:使用数据采集设备记录传感器输出的信号,并将数据存储到计算机或其他存储介质中。
6.分析校准数据:对记录的数据进行分析,计算传感器的校准误差和灵敏度等参数。
7.调整传感器:根据分析结果,对传感器进行调整,以使其输出符合预定的校准规范。
8.重新校准:对调整后的传感器重新进行校准,以验证调整效果是否满足要求。
9.校准报告:将校准过程中的详细数据、分析结果和校准后的参数记录在校准报告中,并加盖校准印章。
三、校准规范1.校准频率:根据传感器的应用和要求,确定校准的频率,以确保传感器的准确性和稳定性。
2.校准误差:校准误差是指传感器输出与实际值之间的差异。
校准误差应控制在一定的范围内,通常为传感器满量程的百分比。
3.线性度:传感器的线性度是指传感器输出和输入之间的直线关系程度。
线性度应在一定的误差范围内,通常为传感器满量程的百分比。
4.灵敏度:传感器的灵敏度是指输入信号变化时,传感器输出的相对变化量。
智能张拉系统位移传感器示值误差校准方法及校准结果不确定度探讨

108《计量与测试技术》2001年第48卷第。
期智能张拉系统位移传感器示值误差校准方法及校准结果不确定度探讨张青。
王霑。
李广。
任群利6李朴。
(通讯作者)(1遵义市产品质量检验检测院,贵州遵义563004;遵义医科大学,贵州遵义593002)摘要:结合智能张拉系统在实际生产建设的应用,通过利用相关计量校准规范和相关国家技术标准,对其示值误差校准方法和测得值不确定度进行分析探讨以提高测得值可信度。
关键词:智能张拉系统;位移传感器;计量校准;不确定度中图分类号:TH822文献标识码:A国家标准学科分类代码:460-0920DOI:16.15988/kb1004-0941.2021.1.036Calibration Method for Indication Error of Displacement Sensor in Intelligent Tension System aad Dscussion on UnceOainty of CaCbrahon ResuitZHANG Qing WANG Zhao LI Guaug REN Qunli LI PuAbshaci:Combined with the applicOion of intelligent tensioning system in actuai production ank construction, though tin usy of relevani mensyremeni cnlibration stankarUt and relevani nationai tecOnicO stankarUt,tin inkicn-tion otou cnlibration methon ank unceUdinty of mensyremeni usults oo analyzeV ank discnsseV to improva tin reti-anilite of mvoyumvqt resultc.KenworOs:intellieent也;—;;system;displacement sensor;metrolovicO cnlibomn;6引言智能张拉系统由智能泵站、智能千斤顶、控制系统等组成,主要用于公路、桥梁、铁路等所有梁型的预应力张拉施工,其中在公路、铁路桥梁施工中尤为常见。
试论基于一维大长度计量 标准装置的拉线式位移传感器校准方法

试论基于一维大长度计量标准装置的拉线式位移传感器校准方法摘要:拉线式位移传感器主要能够对物体的位移情况、位置信息等进行测量。
由于该传感器的实际应用采用电信号输出,因此在使用之前需要进行校准工作。
本文结合拉线式位移传感器的应用方法,对传统校准策略当中存在的不足进行了总结,同时提出了一维大长度的计量方案,通过选用一维大长度计量标准装置,对拉线式位移传感器进行重新校准,提高传感器的应用精准度。
关键词:拉线式位移传感器;计量装置;一维大长度;校准前言拉线式位移传感器在进行计量和信息输出时,主要采用的是电信号输出方式,传感器可以通过不同频率下的脉冲、电流、电压等模拟量,来完成计量信息的反馈。
在针对拉线式位移传感器进行校准时,一般结合传感器自身的应用计量方法,对基本误差、回程误差、线性度和重复性四个标准进行衡量,判断四个标准是否符合相关计量制度要求,以此来完成针对传感器设备的校准工作。
一、传统校准装置的校准方法以往技术领域针对拉线式位移传感器开展校准巩固走,主要采用测长机设备来完成。
测长机是一种简单的装夹附件,测试人员将传感器固定在测长机上,此时通过对测长机进行位置移动的方式,将位于测长机尾端的光栅尺的数字信息进行读取,并与拉线式位移传感器所提供的传感信息模拟量共同作为测量数据的原始数据信息。
通过两组原始数据信息的相互对比,能够计算得到传感器在测量过程中所表现出的基本误差、回程误差、线性度和重复性四个计量特征的最终结果。
最终结果如果不满足拉线式位移传感器的标准要求,则需要对拉线式位移传感器进行测量方式的调整,直至其满足四个计量特征的标准要求为止。
传统的测长机校准方式的主要优点体现在测量校准过程相对简单,测量结果能够以清楚的读数方式呈现在工作人员面前,帮助工作人员做出标准化的判断[1]。
但同时,测长机校准方式所存在的缺点,也是显而易见的。
首先,测长机设备本身是一个装夹附件,拥有固定的规格。
一组测长机设备只能够满足对应规格的拉线式位移传感器的校准工作,无法对其他多种类型的传感器进行测量和校准,适用性较差;其次,测长机设备所采用的尾座读数方式,需要借助人工手动来完成移动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
拉杆式线位移传感器校准系统
【摘要】针对现有的拉杆式线位移传感器校准速度慢、周期长、工作量大、精度低等弊端,研制出一种基于光电检测技术的线位移传感器自动校准系统。
该系统采用伺服电机驱动精密直线运动机构,由光栅传感器实时检测运动滑座的位移,作为线位移传感器的标准位移输入。
同时,校准系统检测线位移传感器的电压输出,根据这两者间的输入输出关系确定拉杆式线位移传感器的灵敏度、线性度、重复度等特性参数。
整个校准过程由计算机控制,从而实现了对拉杆式线位移传感器的自动校准。
分析结果表明,该校准系统能够解决工业现场拉杆式线位移传感器校准问题,实现了校准过程的自动化、快速化与高精度。
【关键词】拉杆式线位移传感器;校准系统;光栅传感器;不确定度分析
1.引言
拉杆式线位移传感器是通过拉杆感受长度尺寸变化并转换成可用输出信号的器件,它是线位移传感器中最常见的一种,可用于测量位移、距离、位置和应变量等长度尺寸。
拉杆式线位移传感器在机械制造业和工业自动检测领域中占有重要地位,广泛应用于电力、水利、建筑、航空航天、公路铁路交通等多个行业的测试任务。
为保证传感器使用的可靠性和测量精度,根据国标规定需要对灵敏度、基本误差、线性度、回程误差和重复性等主要计量特性做定期校准[1,2]。
目前,国内外常用的线位移传感器校准方法是通过万工显[3]、测长机[4]、激光干涉仪[5,6]等仪器设备提供标准位移,由线位移传感器对该标准位移量进行检测,得到线位移传感器的输入-输出关系,进而实现传感器的校准。
激光干涉仪虽具有较高的测量精度,但校准机构复杂、成本高,且对测量环境的要求高,主要用于精度要求特别高的线位移传感器校准。
采用万工显、测长机等设备进行校准,校准过程以手工操作为主,校准精度和效率都不高。
并且,现有研究成果主要侧重于理论和实验方法的研究,未能形成标准化的设备,而市场上目前也没有合适的专用校准系统。
为此,本文提出一种基于光栅传感器的拉杆式线位移传感器自动快速校准方法,并研制出校准系统,实现了拉杆式线位移传感器的高精度自动校准。
2.校准系统工作原理
本系统采用相对校准法,以高精度光栅传感器测量结果作为标准位移,用NI数据采集卡采集光栅传感器测得的标准位移量和线位移传感器的电压输出量,以此来校准线位移传感器。
如图1所示,自动校准系统主要由机械部分、光栅传感器、数据采集模块、运动控制模块以及计算机组成。
图1 拉杆式线位移传感器校准系统组成框图
校准时,首先装夹好线位移传感器及其连接组件,然后伺服电机驱动运动滑
座在直线运动机构上沿导轨移动,运动过程全部由计算机控制。
分别安装在直线运动机构上的光栅尺和安装在滑座上的读数装置组成光电检测系统,实时测量运动滑座在直线运动机构上的位移,并结合拉杆式线位移传感器的读数,可得到线位移传感器的灵敏度、线性度、回程误差等特性参数,从而实现对拉杆式线位移传感器的自动校准。
校准系统量程为0~500mm,分辨力可达1μm。
2.1 机械结构设计
校准系统机械部分实现的功能主要包括运动滑座的直线位移传动、线位移传感器的装夹及其位置调整,以及线位移传感器与运动滑座的固定连接。
图2 校准系统机械结构组成图
如图2所示,由于被校准的拉杆式线位移传感器为圆柱形外形,可采用V 型块装夹。
传感器拉杆经安装在运动滑座上的连接组件与滑座相连,并通过一维升降台调整传感器安装高度,使得拉杆与连接组件满足对中性要求。
校准时,伺服电机驱动滚珠丝杠,带动运动滑座沿导轨做正反行程的直线位移。
光栅传感器及其读数头分别安装在直线运动机构的导轨侧面和运动滑座上,可实时测量运动滑座的直线位移,作为线位移传感器的标准位移输入。
2.2 传感器信号采集
校准系统使用美国NI公司USB-6229DAQ卡进行线位移传感器和光栅传感器的信号采集。
其中被校准的线位移传感器输出的是模拟电压信号,范围为-10V~+10V。
光栅传感器输出两路相位差为90°的TTL方波信号和一路参考信号,采集卡中有专门的计数器用来处理这类信号。
在工作时,分别将两路增量信号和一路参考信号与计数器的Source,AUX和GATE引脚相连。
计数器在工作时,一共有三种模式可供选择,分别是X1、X2和X4编码模式,即一倍频、两倍频和四倍频计数。
校准系统采集的信号为低频信号,对信号采集卡的采样频率要求并不高,采用大于1kHz即可。
采集卡通过USB接口与计算机进行通讯,USB总线供电方式可以提供3.5V的直流电压,能够满足信号驱动和采集的需要。
2.3 运动与测量控制
校准系统设计了三种控制模式,可通过计算机直接选取。
第一种是等间隔采点模式,即在整个行程中,等间距采集11个校准点(包括上、下限)。
NI数据采集卡按顺序分别采集线位移传感器输出的电压值U与光栅传感器输出的位移量L。
以正、反两个行程为一个测量循环,共测三个循环。
测量完成后,计算机自动将测量数据保存在数据库中并计算出校准结果,绘制出传感器特性曲线。
第二种为随机采点模式,即在整个行程中,系统随机采集11个校准点,然后按第一种模式的后续操作进行校准。
第三种为自定义采点模式,即由校准人员在校准量程范围内任意指定一系列校准点,记录这些校准点处线位移传感器的输出电压
值U与光栅传感器输出位移量L,再由系统计算得出线位移传感器特性曲线。
3.校准系统不确定度分析
使系统校准结果产生不确定度的主要因素包括:阿贝误差引入的不确定度分量、测量重复性引入的不确定度分量、光栅传感器误差引入的不确定度分量、线位移传感器安装误差引入的不确定度分量、采集卡信号采集引入的不确定度分量等[7-9]。
3.1 阿贝误差引入的不确定度分量u1
由于光栅传感器与被校准的线位移传感器所测量的位移量不处在同一直线上,直线导轨存在的直线度误差会导致校准过程中产生阿贝误差。
在校准量程范围内,运动机构中导轨的最大直线度误差为15μm,光栅传感器标尺与线位移传感器拉杆中心线之间的有效距离为90mm,由此计算出的两者之间的最大夹角为,因此阿贝误差引入的不确定度分量为:(1)
3.2 测量重复性引入的不确定度分量u2
测量重复性引入的不确定度分量采用A类评估法。
对线位移传感器在200mm点处重复测量10次,得到的传感器输出电压(单位:V)分别为4.0001、4.0005、3.9998、4.0003、3.9994、3.9999、4.0001、4.0004、3.9996、4.0008,对应的位移量示值(单位:mm)分别为200.005、200.025、199.990、200.015、199.980、199.995、200.005、200.020、199.970、200.040,算术平均值mm。
由贝塞尔公式计算得到单次测量标准差s为:
(2)
测量重复性引入的不确定度分量为:
(3)
3.3 光栅传感器误差引入的不确定度分量u3
本校准系统选用的是海德汉LS477增量式直线光栅传感器,其测量不确定度e3为±3μm。
令该误差服从正态分布,k3取3,由此产生的不确定度分量为:
(4)
3.4 线位移传感器安装误差引入的不确定度分量u4
线位移传感器的安装误差将导致拉杆与滑座的运动方向不一致,两者存在夹角θ,从而产生线位移传感器的测量误差,表现为余弦误差。
为此,校准系统在线位移传感器安装时采用千分表校核,确保夹角θ值很小,经计算此项误差引起
的不确定度分量可忽略不计。
3.5 采集卡信号采集误差引入的不确定度分量u5
此项误差主要来源于采集卡在采集线位移传感器输出电压值的量化误差,USB-6229DAQ数据采集卡的采集精度为16bits。
由于线位移传感器输出电压值为0~10V,对应的位移量为0~500mm。
按最大量化误差计算出的不确定度分量为:
(5)
3.6 合成标准不确定度uc
假设上述计算的各不确定度分量彼此相互独立,则合成的标准不确定度为:
(6)
3.7 扩展不确定度U
校准系统扩展不确定度:
,(k=2)(7)
4.结论
本文针对现有的拉杆式线位移传感器校准周期长、成本高的缺点,提出了一种基于光栅传感器的校准方法,并在此基础上研制出适用于拉杆式线位移传感器的高精度自动校准系统。
该系统校准过程中的直线运动和位移测量完全由计算机控制,校准不确定度为34.2μm,可实现0~500mm量程拉杆式线位移传感器的高精度自动校准。
本校准系统降低了拉杆式线位移传感器的检定成本,提高了传感器的使用效率,同时也为其它类型线位移传感器的校准提供了借鉴。
参考文献
[1]JJF 1904-2002.测量仪器特性评定[S].
[2]JJF 1305-2011.线位移传感器校准规范[S].
[3]吴永红.线位移传感器检定方法[J].中国测试技术,2003(3):40-41.
[4]伍沛刚.利用测长机校准拉线式位移传感器的方法[J].工具技术,2009(1):108.
[5]朱目成,叶子郁,王雅萍.差动位移传感器的激光干涉法自动检定[J].仪表技术,2004(5):73-75.
[6]唐志锋,何小妹,王晓梅.位移传感器校准技术研究[J].计测技术,2011,31(6):15-17.
[7]韩清华,王海英,董延军,等.线位移传感器校准的一种新装置[J].新技术新仪器,2008,28(5):20-22.
[8]崔健军.线位移传感器校准及不确定度分析[J].计量学报,2010,31(6A):1-5.
[9]JJF 1059-1999.测量不确定度评定与表示[S].。