端点条件.
轮廓插补原理——其他插补方法

第五节 其他插补方法前面已经介绍了几种较常用的插补方法,但数控技术经过数十年的发展,特别是微处理器的应用,在原有的脉冲增量法插补原理基础上又派生出许多改进或新型的插补算法,例如:比较积分法、时差法、矢量判别法、最小偏差法、脉冲增量式的直接函数法等。
针对复杂曲线轮廓或列表曲线轮廓,在数据采样法中又提出了一些新的插补算法,例如:样条插补、螺纹插补等。
为此,下面继续简单介绍比较积分法插补、样条插补以及螺纹插补的基本思路。
一、比较积分法前面己经介绍,逐点比较法速度平稳,调整方便,但不容易实现多坐标轴的联动;而DDA 法便于坐标轴的扩展,但速度控制不太方便。
现若将这两种算法结合在一起,就能够扬长避短,集两者优点于一身,实现各种函数和多坐标轴联动插补,且插补精度较高,运算简单,易于调整,是一种比较理想的脉冲增量式插补方法。
(一)比较积分法直线插补设将要插补的第一象限直线起点在坐标原点O (0,0),终点为E (X e ,Y e ),则直线上的所有动点N (X i ,Y i )必然满足下面等式i ee i X X Y Y =(3-97) 现对式(3-97)求微分得 ee i i X Y dX dY = (3-98) 如果在此基础上引入时间变量t ,分别对两坐标变量进行积分,就可得到前面介绍的DDA 直线插补算法。
显然,如此处理不是目的,下面必须另辟新径,寻找一种更理想的解决方案。
为此引入比较判别的思想,建立两个被积函数之间的内在联系,将式(3-98)改写为增量形式,即有Y e ∆X i =X e ∆Y i (3-99)由于式中X e 、Y e 均是以脉冲当量为单位的数字量,设∆X i 、∆Y i 均为单位位移增量,在数值上为“1”。
现对式(3-99)两边进行积分,并利用矩形法求其积分值,可得∑∑===ii Y j e X i e X Y 11 或 Y e +Y e +……+Y e =X e +X e +……+X e (3-100)(X i 项) (Y i 项)在这里要指出的是,式(3-100)等号两边求和的项数不一定相等,等式左边是X i 项,而右边是Y i 项。
最优控制应用概述

最优控制的应用概述1.引言最优控制是现代控制理论的重要组成部分,它研究的主要问题是:在满足一定约束条件下,寻求最优控制策略,使得性能指标取极大值或极小值。
最优控制是使控制系统的性能指标实现最优化的基本条件和综合方法。
可概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标值为最优。
最优控制是最优化方法的一个应用。
从数学意义上说,最优化方法是一种求极值的方法,即在一组约束为等式或不等式的条件下,使系统的目标函数达到极值,即最大值或最小值。
从经济意义上说,是在一定的人力、物力和财力资源条件下,是经济效果达到最大(如产值、利润),或者在完成规定的生产或经济任务下,使投入的人力、物力和财力等资源为最少。
最优控制理论是研究和解决从一切可能的控制方案中寻找最优解的一门学科,基本内容和常用方法包括动态规划、最大值原理和变分法。
这方面的开创性工作主要是由贝尔曼(R.E.Bellman)提出的“动态规划”和庞特里亚金等人提出的“极大值原理”,到了60年代,卡尔曼(Kalman)等人又提出了可控制性及可观测性概念,建立了最优估计理论。
这方面的先期工作应该追溯到维纳(N.Wiener)等人奠基的控制论(Cybernetics)。
最优控制理论的实现离不开最优化技术。
控制系统最优化问题,包括性能指标的合理选择以及最优化控制系统的设计,而性能指标在很大程度上决定了最优控制性能和最优控制形式。
最优化技术就是研究和解决最优化问题,主要包括两个需要研究和解决的方面:一个是如何将最优化问题表示为数学模型;另一个是如何根据数学模型尽快求出其最优解。
2.最优控制问题所谓最优控制问题,就是指在给定条件下,对给定系统确定一种控制规律,使该系统能在规定的性能指标下具有最优值。
也就是说最优控制就是要寻找容许的控制作用(规律)使动态系统(受控系统)从初始状态转移到某种要求的终端状态,且保证所规定的性能指标(目标函数)图1最优控制问题示意图达到最大(小)值。
三次样条曲线

2 M1+ M2=6[( y2- y1)/ h1- y1']/ h1; λi Mi-1+2 Mi+μi Mi+1= Di,i=2,3,…,n-1; Mn-1+ 2Mn=6[ yn' -( yn- yn-1)/ hn-1]/ hn-1;
p4
三次参数样条曲线定义
三次参数样条曲线的表达式 p(t)=B1+B2t+B3t2 +B4t3 0<=t<=tm
在两点p1,p2之间定义一条该曲线(参数形 式) 令p1t=0; p2t=t2; 已知: p’1, p’2 代入方程可得方程系数B1\B2\B3 \B4
p1 p2
三 次
p(0) p1
pi1 ]t2 ti1
线
0 t ti1
推
导
连
续 的 三
由条件,
有
曲线在pi1应达到二阶连续
即
2B3i
6B4iti1
2
B i1 3
次
pi
参 数 样 条
[ti2
2(ti2 ti|1)
ti1
]
pi1
pi2
3( ti1 ti2
( pi2
pi 1 )
ti2 ti1
( pi1
pi ))
曲
线 i 1,, n 2
p(p01)
B1 B2
三次样条插值的方法和思路

三次样条插值的方法和思路摘要:1.三次样条插值的基本概念2.三次样条插值的数学原理3.三次样条插值的实现步骤4.三次样条插值的优缺点5.三次样条插值在实际应用中的案例正文:在日常的科学研究和工程应用中,我们经常会遇到需要对一组数据进行插值的问题。
插值方法有很多,其中三次样条插值是一种常见且有效的方法。
本文将从基本概念、数学原理、实现步骤、优缺点以及实际应用案例等方面,全面介绍三次样条插值的方法和思路。
一、三次样条插值的基本概念三次样条插值(Cubic Spline Interpolation)是一种基于分段多项式的插值方法。
它通过在各个节点上构建一条三次多项式曲线,使得这条曲线在节点之间满足插值条件,从而达到拟合数据的目的。
二、三次样条插值的数学原理三次样条插值的数学原理可以分为两个部分:一是分段三次多项式的构建,二是插值条件的满足。
1.分段三次多项式的构建假设有一组数据点序列为(x0,y0),(x1,y1),(x2,y2),(x3,y3),我们可以将这些数据点连接起来,构建一条分段三次多项式曲线。
分段三次多项式在每个子区间上都是一个三次多项式,它们之间通过节点值进行连接。
2.插值条件的满足为了使分段三次多项式在节点之间满足插值条件,我们需要在每个子区间上满足以下四个条件:(1)端点条件:三次多项式在区间的端点上分别等于节点值;(2)二阶导数条件:三次多项式在区间内的二阶导数等于节点间的斜率;(3)三阶导数条件:三次多项式在区间内的三阶导数等于节点间的曲率;(4)内部点条件:三次多项式在区间内部满足插值函数的连续性。
通过求解这四个条件,我们可以得到分段三次多项式的系数,从而实现插值。
三、三次样条插值的实现步骤1.确定插值节点:根据数据点的位置,选取合适的节点;2.构建分段三次多项式:根据节点值和插值条件,求解分段三次多项式的系数;3.计算插值结果:将待插值点的横坐标代入分段三次多项式,得到插值结果。
计算流体力学有限差分法

计算流体力学有限差分法流体力学有限差分法(Finite Difference Method,FDM)是一种常用的计算流体力学的方法。
它是基于流体力学基本方程对系统求解压力、速度和位置变化的一种近似数值方法,这些方程可以使用有限差分法求解得到准确结果。
一、流体力学有限差分法的概念1、端点条件:端点条件是差分方程组确定变量的边界条件,主要有边界条件和内部条件。
2、场变量定义:流动的物质可以用速度、压力和密度来描述,这种变量称为场变量。
3、有限差分法:有限差分法试图使描述精度在最小情况下得到一个可以接受的结果。
它将待求解区域划分为若干个小块,并且计算每一个小块上的变量。
4、边界条件:边界条件是用来描述物理事件发生的时候的物理量,如压力、流动量等。
二、流体力学有限差分法的基本步骤1、数学模型:开发有限差分方程,用来描述流体力学问题,这种模型可以由流体力学的基本方程得到。
2、网格划分:将区域网格划分成更小的网格,为了更准确的解决流体力学问题。
3、空间离散:将每一个网格按照有限差分公式空间离散,获得离散的压力方程式。
4、时间离散:在解决大规模动态流体力学问题时,通过一个更小的时间步骤进行求解。
5、求解:用适当的方法和算法求解有限差分方程式,获得求解结果。
三、流体力学有限差分法的优势1、高精度:使用此法,可以获得较高数值精度,从而准确描述流体力学过程。
2、计算效率:该方法可以快速找出有效的解决方案,并且计算效率更高。
3、计算能力:此方法可以处理复杂的物理问题,而且没有太多的硬件限制。
4、收敛性:当求解复杂的物理问题时,有限差分法不太容易出现"收敛"的情况。
5、可靠性:此方法可以快速、准确的求解出可靠的结果,相对于其他求解方法,其精度更高。
四、总结流体力学有限差分法是一种常用的计算流体力学的方法。
它易于实施,并且可以获得较高数值精度,从而准确描述流体力学过程。
处理复杂的物理问题时,它可以提供较快、较准确的结果,更能可靠性和可靠性更好。
如何判断两条线段的相交情况

如何判断两条线段的相交情况线段相交问题在计算几何中是一个常见的问题。
判断两条线段是否相交具有重要的实际意义,尤其在计算机图形学、建筑设计和交通规划等领域中。
本文将介绍判断两条线段相交情况的方法和算法。
一、方法一:端点法端点法是最直观和简单的方法之一。
我们可以通过观察线段的端点位置来判断它们的相交情况。
该方法适用于线段没有重叠的情况。
下面是判断两条线段相交情况的步骤:1. 分别计算两条线段的斜率。
2. 如果两条线段的斜率都存在且不相等,说明两条线段不平行,可能相交。
3. 因为相交的线段必然有一个共同的端点,所以我们只需要判断两条线段的端点是否满足以下条件之一:第一个线段的两个端点都在第二条线段的两侧,或者第二条线段的两个端点都在第一条线段的两侧。
如果满足这个条件,说明两条线段相交。
二、方法二:向量法向量法是另一种常用的判断线段相交情况的方法。
该方法通过向量的运算和性质来判断两条线段是否相交。
下面是使用向量法判断线段相交情况的步骤:1. 计算两条线段的向量表示。
2. 设两条线段分别为AB和CD,根据向量的性质,线段AB和线段CD相交的充要条件是:向量AD和向量AB的方向不同,同时向量CA和向量CD的方向也不同。
即(AB × AD) * (CD × CA) < 0,其中×表示向量的叉积运算,*表示向量的点积运算。
3. 如果上述条件成立,则说明两条线段相交。
三、方法三:跨立实验法跨立实验法是判断线段相交情况的另一种有效方法。
该方法通过判断线段所处的相对位置来确定它们是否相交。
以下是跨立实验法的步骤:1. 以线段的一个端点作为起点,另一个端点作为终点,创建两个向量。
2. 分别计算两个向量与第三个向量的叉积。
3. 如果两个叉积的乘积小于0,说明两条线段相交。
四、方法四:区间相交法区间相交法是一种将线段映射到区间上的方法,通过判断两个区间是否有重叠来确定线段是否相交。
以下是区间相交法的步骤:1. 将两条线段在x轴和y轴上分别投影,得到两个x轴上的区间和两个y轴上的区间。
导数端点效应应用条件
导数端点效应应用条件导数端点效应是指函数在极限点处的函数行为和函数中点附近的函数行为存在显著差异。
导数端点效应是微积分中的重要概念,对于描述函数的局部行为具有重要意义。
在应用导数端点效应时,需要满足一定的条件。
下面是一些常见的条件和相关参考内容。
1. 函数在端点处导数不存在导数端点效应发生的一个典型情况是函数在极限点处导数不存在。
常见的情况包括函数在端点处不可导或者函数的导数存在间断点。
在这种情况下,我们可以通过观察函数的图像来分析函数在极限点处的行为。
参考内容可以包括作图方法、导数定义和极限的相关知识。
2. 函数在端点处导数趋于无穷大另一个常见的情况是函数在极限点处的导数趋于无穷大。
这意味着函数在极限点处的斜率无限增大或无限减小。
在这种情况下,函数的图像可能会出现垂直或近乎垂直的线段,或者出现直角转折。
参考内容可以包括导数的定义、极限的性质和无穷大的概念。
3. 函数在端点处导数为零函数在极限点处的导数为零,意味着函数在该点处的斜率为零。
这种情况下,可能出现极值点或拐点。
参考内容可以包括导数计算、二阶导数的概念和相关性质。
4. 函数在端点处导数存在但不连续另外一种情况是函数在极限点处的导数存在但不连续。
这可能是因为函数的导数存在间断点,例如导数在某个点处跳跃或趋于无穷大。
在这种情况下,可以通过分段讨论函数在极限点附近的行为。
参考内容可以包括导数的定义、间断点的分类和分段函数的性质。
5. 函数在端点处存在其他特殊情况除了上述情况,函数在极限点处可能存在其他特殊情况,例如函数图像的锯齿形状、函数图像的振荡等。
在这种情况下,可以通过具体分析函数的特点来描述函数在极限点附近的行为。
参考内容可以包括函数图像的形态分析、相关定义和性质的讨论。
综上所述,导数端点效应的应用条件包括函数在极限点处导数不存在、导数趋于无穷大、导数为零、导数存在但不连续,以及其他特殊情况。
在应用导数端点效应时,需要充分理解导数和极限的定义、性质以及函数图像的特点。
集合中端点取等号的口诀

集合中端点取等号的口诀以下是为您生成的十个关于集合中端点取等号的口诀:口诀一:一要看区间开闭型,二把端点单独拎。
开区间就不能等,闭区间时能取衡。
小于等于像拥抱,把数包在怀里停。
大于等于像拉手,不让数儿往外溜。
清楚规则不犯错,端点取等记心中。
口诀二:一思条件定区间,二判端点咋表现。
小于如同赶鸭子,到那为止不等闲。
小于等于像收留,允许站在那一头。
大于好似驱飞鸟,飞到那里不停留。
大于等于像守候,等待在那也能有。
口诀三:一查题目给区间,二辨端点取等难。
小于如同推车子,到点就停不等全。
小于等于像搭棚,包括那个顶上边。
大于好比放风筝,过那一点线不断。
大于等于像建屋,屋顶那点也能住。
口诀四:一瞧区间明方向,二析端点细思量。
小于如同扔石头,砸地之前不停荡。
小于等于像盖房,地基那点可盖上。
大于仿佛吹气球,超过那点还能走。
大于等于像围场,围墙那点也能防。
口诀五:一判区间定范围,二定端点等不等。
小于好比追小兔,追到跟前不停住。
小于等于像抱娃,娃在怀里稳稳拿。
大于如同放鸽子,飞到那点不停息。
大于等于像守仓,仓门那点也能防。
口诀六:一看区间知边界,二想端点等号添。
小于如同赶小鸡,赶到边缘不入围。
小于等于像装袋,袋子口边也能在。
大于好似驱骏马,跑到那边不停下。
大于等于像筑坝,坝头那点也能压。
口诀七:一探区间找边界,二断端点等号现。
小于如同射飞箭,箭头到那不算完。
小于等于像盛水,水缸口沿也能汇。
大于仿佛放风筝,线到那头不拴紧。
大于等于像围圈,圈口那点也能圈。
口诀八:一瞅区间定两端,二决端点等号安。
小于好比水流淌,流到岸边不停浪。
小于等于像装箱,箱口那沿也能装。
大于如同鸟飞翔,飞过那点不停航。
大于等于像圈羊,羊圈边缘也能养。
口诀九:一观区间明界限,二选端点等号选。
小于如同跑步者,跑到终点不停脚。
小于等于像装篮,篮子边缘也能要。
大于好似赛车驰,冲过那线不停时。
大于等于像建篱,篱笆顶点也能依。
口诀十:一察区间识范围,二定端点等号归。
开区间连续则端点的左右极限
开区间连续则端点的左右极限在数学中,开区间是指由两个不相等的实数端点所组成的区间,其中不包括这两个端点。
开区间的特性之一是其左右极限。
左极限指在开区间的左端点处逼近该点的数列的极限,而右极限指在开区间的右端点处逼近该点的数列的极限。
本文将详细探讨开区间连续的条件以及其端点的左右极限的性质。
在数学中,一个函数在某一点连续的定义是指该函数在该点的左极限和右极限都存在,并且相等。
因此,对于一个开区间,函数在该区间内连续的条件是其左端点的右极限等于右端点的左极限。
首先,我们考虑一个函数f(x)在开区间(a, b)内的连续性。
对于左端点a来说,如果存在数列{xn},其中xn递增并且极限为a,那么当n趋向于无穷大时,f(xn)也应该逼近于f(a)。
这个条件可以用数学的极限定义来表达为:对于任意给定的ε>0,存在正整数N,当n>N时,有|f(xn) - f(a)|<ε成立。
同样地,对于右端点b来说,如果存在数列{yn},其中yn递减并且极限为b,那么当n趋向于无穷大时,f(yn)也应该逼近于f(b)。
同样地,这个条件可以用数学的极限定义来表达为:对于任意给定的ε>0,存在正整数M,当n>M时,有|f(yn) - f(b)|<ε成立。
综上所述,一个函数f(x)在开区间(a, b)内连续的条件是:当存在数列{xn},其中xn递增并且极限为a时,有|f(xn) - f(a)|<ε成立,同时,当存在数列{yn},其中yn递减并且极限为b时,有|f(yn) - f(b)|<ε成立,对于任意给定的ε>0。
这个条件保证了函数在开区间的两个端点处具有左右极限,而且这两个极限相等,从而满足了函数在该区间内连续的定义。
举个例子来说明,考虑函数f(x) = 1/x,在开区间(1, 2)内。
我们可以选取数列{xn} = {1+1/n},其中n是正整数,来逼近左端点1,同时,选取数列{yn} = {2-1/n},也是逼近右端点2的数列。
端点效应例题解析
端点效应例题解析【引言】在物理学习中,端点效应是一个不容忽视的现象。
它指的是在电路、力学等系统中,由于边界条件的影响,系统的行为可能出现不同于内部部分的特点。
为了帮助大家更好地理解和掌握这一概念,下面将通过典型例题解析的形式进行详细讲解。
【端点效应的概念和原理】端点效应是指在物理系统中,由于边界条件的存在,使得系统在端点(边界)处的性质与内部部分有所不同。
这种现象在电路、力学等领域具有广泛的应用。
例如,在电路中,当电源电压或电流发生变化时,电路中的元件可能出现非线性特性,导致端点处的电压或电流与内部部分不一致。
在力学中,例如梁的弯曲问题,梁的两端固定时,端部的应变和应力分布可能与内部部分有很大差异。
【端点效应的典型例题解析】例题1:电路分析问题电路如图所示,其中电阻R1=2Ω,电阻R2=3Ω,电源电压V=10V。
求端点A、B的电压。
解析:根据基尔霍夫定律,可以得到端点A、B的电压分别为:VA = V - I1 - I2 = 10V - (I1 + I2)VB = I1 - I2其中,I1和I2分别为通过R1和R2的电流。
根据欧姆定律,可以得到:I1 = V/R1 = 10V/2Ω = 5AI2 = V/R2 = 10V/3Ω ≈ 3.33A将I1和I2带入公式,得到:VA ≈ 10V - 5A - 3.33A ≈ 1.67VVB ≈ 5A - 3.33A ≈ 1.67V结论:端点A、B的电压相等,为1.67V。
例题2:梁的弯曲问题一根长为L、弹性模量为E的梁,两端固定,中间部分受到垂直于梁的力F 作用。
求梁弯曲时的最大应变和应力。
解析:根据梁的弯曲理论,可以得到梁的应变和应力分布规律。
在端部,应力和应变分别为:应变ε= FL/EI应力σ= FL/A其中,I为梁的惯性矩,A为梁的横截面积。
结论:梁端部的应力和应变大于内部部分,呈现出端点效应。
【解题技巧和注意事项】1.注意识别题目中的端点效应现象,掌握相关概念和原理。
特殊点效应(端点效应 零点效应 极值点效应)
特殊点效应(端点效应零点效应极值点效应)特殊点效应是一种解题技巧,利用函数在特殊点(如端点、零点、极值点等)处的函数值,得到不等式恒成立的必要条件,并以此作为分类讨论的标准,从而得到参数的取值范围。
这种影响被称为“特殊点效应”。
端点效应类型一举例来说,对于函数f(x)=(x+1)lnx-a(x-1),当a=4时,求曲线y=f(x)在点(1,f(1))处的切线方程,以及当x∈(1,+∞)时,f(x)>0,求a的取值范围。
首先,f(x)的定义域为(0,+∞)。
当a=4时,f(x)=(x+1)lnx-4(x-1),f'(x)=lnx-3,f'(1)=-2,f(1)=0.因此,曲线y=f(x)在点(1,f(1))处的切线方程为2x+y-2=0.其次,当x∈(1,+∞)时,f(x)>0等价于lnx-a(x-1)/(x+1)>0.令g(x)=lnx-a(x-1)/(x+1),则g'(x)=-2x/(x+1)^2,g(1)=0.由于x∈(1,+∞)时,f(x)>0,所以要求g'(1)=-2/(1+1)^2=-1/4.因此,a≤2是一个必要条件。
接下来,我们分两种情况讨论:ⅰ) 当a≤2且x∈(1,+∞)时,有x^2+2(1-a)x+1>x^2-2x+1,因此g'(x)>0,g(x)在x∈(1,+∞)上单调递增,所以g(x)>0.ⅱ) 当a>2时,令g'(x)=0,得到x1=a-1-(a-1)^2-1,x2=a-1+(a-1)^2-1.由x2>1和x1<x2<1可知,当x∈(1,x2)时,g'(x)<0,g(x)在x∈(1,x2)上单调递减,所以g(x)<0.综上,a的取值范围是(-∞,2]。
端点效应类型二再举一个例子,对于函数f(x)=(1-x^2)ex,求f(x)的单调性以及当x≥0时,f(x)≤ax+1,求a的取值范围。
中位线的判定几何语言
中位线的判定几何语言英文回答:A median is a line segment that joins two points on a triangle and passes through the midpoint of the opposite side. In other words, it divides the triangle into two equal areas. There are three medians in a triangle, each of which connects a vertex to the midpoint of the opposite side.To determine whether a line segment is a median, the following geometric conditions must be met:1. Endpoint Condition: The line segment must have one endpoint at a vertex of the triangle.2. Midpoint Condition: The line segment must pass through the midpoint of the opposite side of the triangle.3. Area Bisection Condition: The line segment dividesthe triangle into two regions with equal areas.中文回答:中位线是连接三角形上两点且过对面边中点的线段。
换句话说,它将三角形分成两个相等的区域。
一个三角形中有三条中位线,每条中位线连接一个顶点到对边中点。
要判断一个线段是否是中位线,必须满足以下几何条件:1. 端点条件,线段必须有一个端点在三角形的顶点上。
第二章 可变端点的横截条件
T
第二节 特殊横截条件 特殊横截条件
以上推导得到一般横截条件:
[ F y ]t T T [ Fy ]t T yT 0
水平终结线(固定端点问题) yT 0 水平终结线涉及一个固定的 yT ,从而 yT 0
[ F yFy ]t T T 0
又因为 T 是任意的,就产生的横截条件:
[ F yFy ]t T 0
水平终结线的横截条件
yT (T )
特殊横截条件
一般横截条件
第二章 可变端点横截条件
主要内容: 一、一般性横截条件 二、特殊横截条件
预备知识:对定积分的求导
(1)莱布尼兹法则——对定积分的求导 对于函数 I ( x )
b
a
F (t , x )dt
(2.6)
b dI Fx (t , x )dt dx a
(2)对积分上限函数求导
b(x )
d (x ) dx
T
步骤1 T ( ) V ( ) F[t , y* (t ) p(t ), y* ' (t ) p(t )]dt 0 T ( ) F dV dT dt F [T , y (T ), y(T )] (3.6) 0 d d
T
0
d p (t )[ Fy Fy ]dt [ Fy ]t T p (T ) [ F ]t T T 0 dt
特殊横截条件
一般横截条件
ymin
[ F yFy ]t T T [ Fy ]t T yT 0
端点法求解导数
端点法求解导数是一种基于函数在端点处的性质来求解导数的方法。
这种方法适用于一些特定类型的函数,如分段函数、周期函数等。
在使用端点法求解导数时,通常需要满足以下条件:
1.函数在端点处连续;
2.函数在端点处的导数存在;
3.函数在端点处的导数可以由端点处的函数值和导数值唯一确定。
具体步骤如下:
1.确定函数的定义域,并找出函数的端点;
2.在每个端点处,分别取一个小的增量Δx,并计算相应的增量Δy;
3.利用端点处的函数值和增量,计算端点处的导数值;
4.如果所有端点处的导数值都相同,则该值就是函数的导数;否则,需要进一步
分析函数的性质和求解方法。
需要注意的是,端点法求解导数只是一种特殊情况下的求解方法,对于一些复杂的函数,可能需要使用其他方法来求解导数。
同时,在使用端点法求解导数时,需要注意精度和误差的问题,避免因为计算误差导致结果不准确。
动态最优化第4讲 变分法可变端点的横截条件
垂直终结线意味着:T 0
横截条件: Fy
t T
0
第四讲 变分法可变端点的横截条件
(四)特殊横截条件
(1)垂直终结线(固定时间水平问题)
例子:求下列泛函的极值曲线
V y t 2 y2 dt
T 0
边界条件 :
y0 4,
T 2,
yT 自由
* 通解: y t C1t C2
把边界条件 y0 4 代入,得:
y* 0 C2 4
第四讲 变分法可变端点的横截条件
(四)特殊横截条件
(1)垂直终结线(固定时间水平问题)
横截条件:
F
y t T
*
2 yT 0
由通解得:y t C1 * 得: y T C 0
厂商面临的问题:
Max S .T .
P, Pdt
2 0
4 P0 11 9
P2 10
第四讲 变分法可变端点的横截条件
(五)例子——动态垄断模型
欧拉方程的通解:
P* t A1e0.12t A2e 0.12t 14
4 9
由利润函数,得: p 260Pt 2000Pt 3200 横截条件: p t 2 0
(二)可变终结点的形式
Max 或 Min
V y F t , yt , yt dt
T 0
S.T. :
y0 A(A给定) yT y( T T , yT自由)
一般横截条件:
F yF
y t T
T Fy
t T
A7.行波法求解一维波动方程的初值问题—半无界问题

行波法求解一维波动方程的初值问题—半无界问题行波法求解一维波动方程的两个基本公式:1.达朗贝尔(d'Alembert )公式:⎰+-+-++=at x at x d aat x at x t x u ξξψφφ)(21))()((21),(; 2.Kirchhoff 公式:⎰⎰⎰----+-++-++=t t a x t a x at x at x d d f a d a at x at x t x u 0)()(),(21)(21))()((21),(τττξτξξξψφφ半无界弦的振动问题对于半无界域上波动方程初值问题的讨论,需要根据端点所处的物理状态不同分别加以讨论。
1. 端点固定(1)齐次端点条件 考虑定解问题.0,0,0,00),0(),()0,(),()0,(),,(2≥+∞<≤>+∞<<⎪⎩⎪⎨⎧===+=t x t x t u x x u x x u t x f u a u t xx tt ψφ求解上述问题的基本思路是以某种方式延拓函数,,,ψφf 使其在0<<∞-x 也有定义,这样把半无界区域+∞<≤x 0上的问题转变为+∞<<∞-x 上的初值问题。
然后利用达朗贝尔公式,求出在+∞<<∞-x 上的解),(t x u 。
同时使此解),(t x u 满足0),0(=t u 。
这样当x 限制在+∞<≤x 0上就是我们所要求的半无界区域+∞<≤x 0上的解。
由微积分知识可知,如果一个连续可微函数)(x g 在),(+∞-∞上是奇函数,则必有0)0(=g 。
因此,要使解),(t x u u =满足0),0(=t u ,只要),(t x u 是x 的奇函数便可。
因此对函数ψφ和,f 关于x 作奇延拓。
我们定义)()(),,(x x t x F ψΦ和如下:⎩⎨⎧≥<--≥≥⎩⎨⎧<≥--=ψ<≥⎩⎨⎧--=Φ.0,0),,(,0,0),,(),(.0,0),(),()(.0,0),(),()(t x t x f t x t x f t x F x x x x x x x x x x ψψφφ 显然函数在和)()(),,(x x t x F ψΦ+∞<<∞-x 上是奇函数。
非特征端点条件下PM函数的迭代根
非特征端点条件下PM函数的迭代根
唐肖;李林
【期刊名称】《数学物理学报:A辑》
【年(卷),期】2022(42)2
【摘要】在特征端点条件下,高度为1的PM函数的任意阶连续迭代根的存在性已经被证明.这就产生了一个在没有特征端点条件下的公开问题,称为特征端点问题.当非单调点个数小于等于迭代根阶数时,此问题在大部分情况下已解决.该文将研究非单调点个数大于迭代根阶数的情形,给出高度为2且阶数也为2的连续迭代根存在的充分条件,部分回答了特征端点问题.
【总页数】13页(P557-569)
【作者】唐肖;李林
【作者单位】重庆师范大学数学科学学院;嘉兴学院数学系
【正文语种】中文
【中图分类】O175
【相关文献】
1.干旱条件下两个大豆品种非水力根信号特征及稳产性比较
2.四零点辅助函数在全部非主特征条件下估值常数的最大性之证明
3.基于幂函数非负矩阵最大特征根的算法
4.喀斯特地区不同坡位条件下优势灌木根际与非根际土壤养分与pH的分布特征
5.非负矩阵Perron根与主特征向量的粒子迭代算法
因版权原因,仅展示原文概要,查看原文内容请购买。
端点效应与极点效应
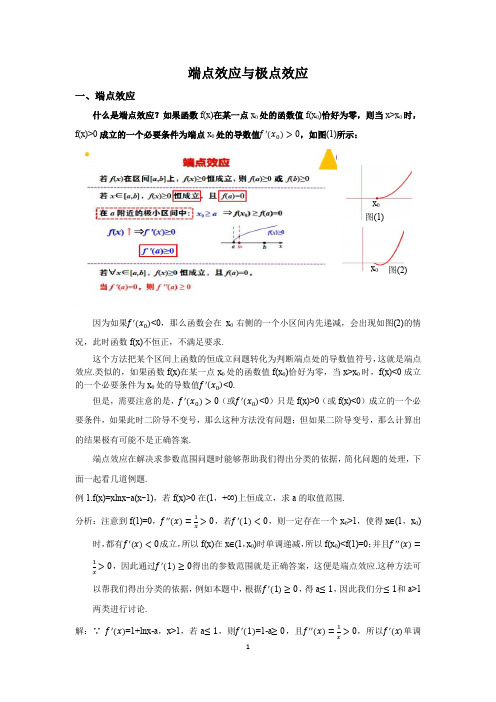
端点效应与极点效应一、端点效应什么是端点效应?如果函数f(x)在某一点x0处的函数值f(x0)恰好为零,则当x>x0时,f(x)>0成立的一个必要条件为端点x0处的导数值f′(x0)>0,如图(1)所示:因为如果f′(x0)<0,那么函数会在x0右侧的一个小区间内先递减,会出现如图(2)的情况,此时函数f(x)不恒正,不满足要求.这个方法把某个区间上函数的恒成立问题转化为判断端点处的导数值符号,这就是端点效应.类似的,如果函数f(x)在某一点x0处的函数值f(x0)恰好为零,当x>x0时,f(x)<0成立的一个必要条件为x0处的导数值f′(x0)<0.但是,需要注意的是,f′(x0)>0(或f′(x0)<0)只是f(x)>0(或f(x)<0)成立的一个必要条件,如果此时二阶导不变号,那么这种方法没有问题;但如果二阶导变号,那么计算出的结果极有可能不是正确答案.端点效应在解决求参数范围问题时能够帮助我们得出分类的依据,简化问题的处理,下面一起看几道例题.例1.f(x)=xlnx-a(x-1),若f(x)>0在(1,+∞)上恒成立,求a的取值范围.分析:注意到f(1)=0,f′′(x)=1x>0,若f′(1)<0,则一定存在一个x 0>1,使得x∈(1,x0)时,都有f′(x)<0成立,所以f(x)在x∈(1,x0)时单调递减,所以f(x0)<f(1)=0;并且f′′(x)=1x>0,因此通过f′(1)≥0得出的参数范围就是正确答案,这便是端点效应.这种方法可以帮我们得出分类的依据,例如本题中,根据f′(1)≥0,得a≤1,因此我们分≤1和a>1两类进行讨论.解:∵f′(x)=1+lnx-a,x>1,若a≤1,则f′(1)=1-a≥0,且f′′(x)=1x >0,所以f′(x)单调x0图(1)x0图(2)递增,所以x>1时,f ′(x )>0恒成立,所以f(x)在(1,+∞)上单调递增,则x>1时,f(x)>f(1)=0;若a>1,e a >1,则f ′(1)=1-a <0,f ′(e a )=1>0,且f ′′(x )=1x >0,f ′(x )单调递增,所以存在x 0∈(1,e a ),使得f ′(x 0)= f ′(1)=0成立,所以f(x)在(1,x 0)上单调递减,所以f(x 0)<f(1);不成立,舍去.综上,a 的取值范围为 a ≤1. 想一想①:f(x)=xe x -ax ,若f(x)>0在(0,+∞)上恒成立,求a 的取值范围.例2:e x -ax 2≥x+1在[0,+∞)上恒成立,求a 的取值范围.分析:令f(x)= e x -ax 2-x-1,f ′(x)= e x -2ax-1,x>0,注意到虽然f(0) =0,但同时f ′(0)=0,看似无法用端点效应,其实不然,可以考虑计算二阶导数,再使用端点效应,即f ′′(x )=e x -2a ,且f ′′′(x )=e x >0,因此可以使用端点效应,由f ′′(0)=1-2a ≥0,得a ≤12,因此我们分a ≤12和a>12两类进行讨论. 解:令f(x)= e x -ax 2-x -1,f ′(x)= e x -2ax -1,x>0,f ′′(x )=e x -2a ,x>0,f ′′′(x )=e x >0,若a ≤12,则f ′′(x )=1-2a ≥0,且,f ‘’‘(x )=e x >0,所以f ′′(x )单调递增;又f ′′(x )=1-2a ≥0,所以f ′′(x )≥0恒成立,f ′(x )单调递增;又f ′(0)=0,所以x>0时,f ′(x )>0恒成立,所以f(x)在(0,+∞)上单调递增,则x>0时,f(x)>f(0)=0;若a >12,则f ′′(x )=1-2a <0,f ′′(2a )=e 2a -2a >0,f ′′′(x )=e x >0,所以存在x 0∈(0,2a),使得f ′′(x 0)=0成立,所以当x 0∈(0,x 0)时,f ′′(x )<0,f ′(x )在(0,x 0)上单调递减,且f ′(0)=0,所以f(x)在(0,x 0)上单调递减,f(x 0)<f(0)=0不成立,舍去.综上,的取值范围为a ≤12. 反例:e x +ax 2-x ≥12x 3+1在[0,+∞)上恒成立,求a 的取值范围.(2020年全国卷一). 分析:不妨令f(x) e x -12x 3+ax 2-x -1 ,则f(0)=0,此时看似能够使用端点效应,其实不然,因为f ′(x )=e x -32x 2+2ax -1,且f ′(0)=0;而f ′′(x )=e x −3x +2a ,f ′′′(x )=e x -3在[0,+∞)上会变号,这时如果使用端点效应,应该有f ′′(0)=1+2a ≥0,即a ≥−12,但其实这个答案是错误的,理由如下:f ′′(0)=1+2a ≥0,但f ′′′(x )=e x -3,可知f ′′(x )在(0,ln3)上递减,在(0,ln3)上f′′(x)仍然可能为负,也即f′(x)可能会先递减,此时f′(x)也有可能为负,所以f(x)在[0,+∞)上的函数值也可能比端点处小,即这种情况下f(x)有可能为负值.事实上,当a=12时,f(1)=e -3<0,就不满足要求.所以,当高阶导数变号时,我们应该慎重,此时,端点效应很有可能就会失灵.本题可考虑分离参数法来处理.[7−e 24,+∞).二.极点效应什么是极点效应?如果函数f(x)在某一点x0处的函数值f(x0)恰好为零,则当x>a时(其中a<x0),f(x)>0成立的一个必要条件为x0处的导数值f′(x0)=0,如图(1)所示.因为如果f′(x0)<0,那么函数会在x0右侧的一个小区间内先递减,会出现如图(2)的情形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Thank you
About Author
Hasik Sunwoo Department of Mathematics,
Konkuk University, Korea
purpose
The control points of the degree reduced Bézier curve can be obtained as a product of the degree reduction matrix and the vector of original control points.
LetqI (q0 ,..., qr ,0,...,0, qms ,..., qm )t andq II (..., qr 1,..., qms ,...)t q q I q II
Then we can find a matrix Q such that
1
q1 Q1 p
And also find a matrix
q II Q II p
Q II
such that
What to Do In this paper
计算
Q II
由于对称性,同理可得:
计算 Q II
计算
(1)
Q II
计算
(2)
Q II
计算 Q
II
计算 Q II
(3) 其中 (4)
(5)
计算
(6)
Q II
计算
Final consideration
Matrix representation for multidegree reduction of Bézier curves
Hasik Sunwoo
Computer Aided Geometric Design 22 (2005) 261–273
Overview
About Author purpose Related Work & What to Do In this paper What to do in this paper Final considerations
Related Work
General Geometric Problems:
Chen, G.-D., Wang, G.-J., 2002. Optimal multi-degree reduction of Bézier curves with constraints of endpoints continuity. Computer Aided Geometric Design 19, 365–377. Ahn,Y.J.,Lee,B.G,Park,Y.,Yoo,J.,2004. Constrained polynomial degree reduction in the L2-norm equals best weithed Euclidean approxiation of
Related Work
端点条件:
Relatቤተ መጻሕፍቲ ባይዱd Work
其中
Related Work
解出: 与之相对应得基:
What to Do In this paper
权函数:
w(r ,s ) (t ) (1 t )r t s
What to Do In this paper
What to Do In this paper