二维数控工作台设计
数控车床工作台二维运动伺服进给系统设计

数控车床工作台二维运动伺服进给系统设计摘要:数控车床在制造业中起着至关重要的作用。
为了提高生产效率和产品质量,设计一个稳定可靠、精确灵活的二维运动伺服进给系统尤为重要。
本文将针对数控车床工作台的二维运动伺服进给系统进行设计,包括运动控制算法、驱动器选型、传感器选择等方面。
1.引言数控车床是一种以电子技术、计算机技术和车床技术为基础的现代化机床。
它通过运动控制系统实现工作台的运动,可以实现复杂的加工工艺。
二维运动伺服进给系统是数控车床的核心部件之一2.运动控制算法运动控制算法是二维运动伺服进给系统的核心技术之一、常用的运动控制算法包括PID控制算法、自适应控制算法等。
PID控制算法是一种经典的,应用广泛的控制算法,它根据测量值与期望值的差异计算出控制量,并对系统进行修正。
自适应控制算法则是根据系统的参数变化自动地调整控制参数。
在设计二维运动伺服进给系统时需要根据实际情况选择合适的控制算法。
3.驱动器选型驱动器是实现工作台运动的关键部件,它将控制信号转换为电力信号,驱动电机工作。
在选择驱动器时需要考虑工作台的负载情况、速度要求和精度要求等因素。
常用的驱动器有直流伺服驱动器、交流伺服驱动器和步进驱动器等。
在设计二维运动伺服进给系统时需要根据实际情况选择合适的驱动器。
4.传感器选择传感器可以实现对工作台位置、速度和负载等参数的测量,是二维运动伺服进给系统的重要组成部分。
根据需要可以选择位置传感器、速度传感器和负载传感器等。
常用的位置传感器有编码器、激光干涉仪等,速度传感器有霍尔传感器、光电传感器等,负载传感器有压力传感器、力传感器等。
在设计二维运动伺服进给系统时需要根据实际需求选择合适的传感器。
5.结论设计一个稳定可靠、精确灵活的二维运动伺服进给系统对于提高数控车床的加工精度、提高生产效率具有重要意义。
本文针对数控车床工作台的二维运动伺服进给系统进行了详细的设计,包括运动控制算法、驱动器选型、传感器选择等方面。
二坐标数控工作台设计

二坐标数控工作台设计作为一种重要的机械设备,数控工作台在现代制造业中广泛应用。
它的设计涉及到多个方面,如结构设计、系统设计、控制设计等。
本文将通过详细讨论数控工作台的设计,从而深入了解该设备的特点和功能。
首先,数控工作台的结构设计是其设计过程中的核心内容之一、工作台的结构应考虑到操作人员的操作需求以及工作时的稳定性和安全性。
一般而言,工作台的结构包括基座、座台和立柱。
基座用于支撑整个工作台的重量,座台用于放置工件和工具,立柱则用于支撑座台、控制单元和操作面板。
其次,数控工作台的系统设计是数控工作台设计中的另一个重要方面。
系统设计包括运动系统、控制系统和传感系统。
运动系统负责使工作台能够进行各种形式的运动,如平移、旋转和倾斜等。
控制系统则负责监控和控制工作台的运动,以确保其按照预定的路径和速度进行。
传感系统则用于实时监测工作台的状态,如位置、速度和负载等。
此外,数控工作台的控制设计也是设计过程中的关键部分。
控制设计涉及到控制算法的选择、控制参数的设置以及编程界面的设计等。
为了提高工作台的精度和效率,需要选择合适的控制算法,如PID控制算法或最优控制算法。
同时,还需要根据实际情况设置合理的控制参数,以确保工作台的运动能够满足要求。
此外,编程界面的设计也是非常关键的,它应该简单易用、功能完善,以提高操作人员的工作效率。
最后,数控工作台还需要考虑安全性和可靠性等方面的设计。
安全性设计主要包括安全装置的设置和紧急停止按钮的设计。
安全装置可以防止不当操作或设备故障引起的事故。
紧急停止按钮可以在紧急情况下迅速停止工作台的运动,以保护操作人员的安全。
可靠性设计主要包括选用合适的材料和零部件,以及进行严格的质量控制。
综上所述,数控工作台设计涉及到结构设计、系统设计、控制设计以及安全性和可靠性等方面的内容。
只有综合考虑这些方面的要素,才能设计出性能优良、使用方便、安全可靠的数控工作台。
CNC二维工作平台设计

CNC二维工作平台设计摘要在本次设计中,我采用常规分离式主传动设计,机床主传动采用液压操纵机构,可实现十八级转速。
机床主轴箱内的传动齿轮均经淬硬磨齿处理,传动比稳定,运转噪音低。
机床主轴为二支撑结构,前支撑采用C级高精度轴承,润滑油润滑,提高了回转精度,使机床主轴具有良好的精度和刚性。
机床采用单片式电磁刹车离合器,解决主轴的刹车及离合问题,离合器安装于主轴箱带轮处,使床头箱内结构大为简化,便于维修。
机床两轴进给系统采用步进电机驱动滚珠丝杠的典型传动方式,在滑板与床鞍及床鞍与床身之间的滑动面处贴有TSF导轨板,滑动磨擦系数非常小,有助于提高了机床的快速响应性能及生产效率。
机床采用立式四工位刀架,该刀架布刀方便,刚性好。
进给方面,采用开环数控系统,即步进电机数控进给方式。
采用步进电机开环数控系统已基本能满足进给精度的要求。
主传动由于采用了分离传动发案,可较好的隔离电机及变速箱的震动,解决了热变形对主轴的影响,提高机床的加工精度。
再者,数控系统采用单片机技术,可靠性高,成本低,经济性好。
在总体性能上可以达到经济精密数控机床之列,达到较好的性价比。
该机床可以加工各种轴类、盘类零件,可以车削各种螺纹、圆弧、圆锥及回转体的内外曲面。
作为通用型机床,特别适合汽车工业、摩托车行业、电子工业、航天、军工等行业,对旋转体类零件进行高效、大批量、高精度加工时采用。
机床采用机、电、液一体化结构,整体布局紧凑合理,便于维修和保养,外形符合人机工程学的原理,宜人性好,便于操作。
关键词: CNC CJ6132 分离传动步进电机ABSTRACTIn this design, I adopt the normal regulations to separate the type the lord to spread to move the design, Lathes the lord spread to move to adopt the liquid to press to manipulate the organization, and can realize 18 classes turn soon. Lathes principal axis box the spreading of inside move the wheel gear to all was wheted by quench the gear to handle, spread to move the ratio stability, and revolve the noise low. Lathes principal axis is two prop up the construction, and before prop up to adopt the high accuracy bearings of C class, grease, and increase the turn-over accuracy, and make the Lathes the principal axis have the good accuracy with rigid.Lathes adoption brake for type electromagnetism brake clutch, solution principal axis of single slice and leave to match the problem, clutch to install to take the round in the principal axis box, and make first inside construction is big for the simplification, convenient for maintain. Lathes two stalks enter the system to adopt the step the glide for typical model for entering the electrical engineering drive recirculating-ball screw spreading moving the way, among the skateboard and bed saddle and bed saddle and bed body to stick to have the TSF driver track the plank, glide coefficient of friction very small, is beneficial toed to increase the Lathes of quickly respond to the function and produce the efficiency. Four knifes, the knife's of types of adoption on edge of Lathes cloth knife convenience, rigid good.Enter to give the aspect, and adopt to open wreath Numerical control the system, namely step enter electrical engineering Numerical control enter to the way. Adoption step request for entering the electrical engineering opening wreath Numerical control the system already basic satisfy into to the accuracy. The lord spreads to move because of adopting the separation to spread to move the hair case, can good insulation electrical engineering and become soon the box's vibration, solve hot transform to influence principal axis, increase the processing of Lathes of accuracy. Furthermore, Numerical control system adoption the machine technique of single slice, dependable is high, and the cost is low, and the economic is good.Can attain the row of the bed of economic and precise Numerical control machine on the total function, and attain the ratio of good sex price.Can cut many kinds of screw thread, round, taper and rotor.The Lathes can process the every kind of stalk, dish spare parts,Be used as the bed of in general use type machine, special in keeping with car the industry, motorcycle the profession, electronics the industry, spaceflight, soldier the work the etc. the profession, right revolve the spare parts proceeds efficiently, large quantity measure, the high accuracy process the hour the adoption.Lathes adoption machine, electricity, liquid incorporate. integrative construction, the whole layout tightly packed reasonable, convenient for maintain with maintain, and the shape match the person machine the engineering the principle, pleasant that learn good, convenient for operation.Key phrase: Numerical control CJK6132 Apart driver Walkingelectromotor目录一、总体方案设计 (6)(一)、主传动的组成部分 (6)(二)、机床主要部件及其运动方式的选定 (7)(三)、机床的主要技术参数 (8)(四)、各组成部件的特性与所应达到的要求 (8)二、机床主传动设计 (11)(一)、主要技术参数的确定 (11)1.尺寸参数 (11)2.运动参数 (13)3、主轴转速的确定 (15)4、转速范围及公比 的确定 (15)5、结构式与结构网的确定 (16)6、转速图的拟定 (17)7、传动比参数的确定 (18)(二)、传动系统图的拟定 (19)(三)、电动机的选择 (21)(四)、齿轮传动的设计计算 (21)(五)、轴的设计计算 (25)三、进给系统的设计计算............................. 错误!未定义书签。
数控钻床二维工作台设计毕业设计

毕业设计(论文)数控钻床二维工作台设计姓名:学号:所在系部:专业班级:指导教师:日期:毕业设计(论文)任务书毕业设计(论文)学生开题报告课题类型:课题类型: A-理论探究型 B-实践应用型摘要伴随着各行业对机加工产品要求的不断提高和数控技术的飞速发展,数控机床以其高精度、高效率和低劳动强度等诸多普通机床无法比拟的优势,成为当今制造业的主流加工设备,大多数企业的生产机床为普通机床,生产设备陈旧落后,用这种设备加工出来的产品普遍存在质量差,精度低,成本高,供货周期长等问题,已经不能适合当今企业所面临的竞争需要。
数控机床设计是机电一体化专业教学中的一个重要的实践环节,学生学完技术基础课和专业课,特别是“数控技术”课程后应用的,它是培养我们能力的重要步骤。
本设计是以机电一体化的典型课题---数控系统设计方案的拟定为主线,通过对数控系统设计总体方案的拟定、进给伺服系统机械部分设计,计算以及控制系统硬件电路的设计,使学生能够综合应用所学过的机械、电子和微机方面的知识,进行一次机电结合的全方面训练,从而培养我们初步设计计算的能力以及分析和处理生产过程中所遇到的问题的能力。
AbstractWith the industry machining the continuous improvement of product requirements and rapid development of NC technology, CNC machine tools with high precision, high efficiency and low labor intensity, and many other general machine tools can not match advantage, become the mainstream of manufacturing and processing equipment, Most of the production machine for the general machine tools, production equipment, outdated, Use this equipment out of the prevailing poor quality products, low precision, high cost, long lead and other issues, can no longer suited to today's enterprises face the need for competition. CNC Mechatronics curriculum design is an important teaching practice link, Xueshengxuewan technical courses and specialized courses Especially the "numerical control technology," the application of course, it is to train students to integrate theory with practice, solving practical problems important step. The course design is based on a typical mechatronic system design topics --- CNC program development as the main line, numerical control system design by developing the overall program, into the mechanical design of the servo system Composite applications enable students to have learned the mechanical, electronic and computer knowledge, to conduct a mechanical and electrical integration of all aspects of training, which students have the computing power and the preliminary design analysis and process of production capacity of the problems encountered .Keywords:general Milling NC mechanical parts servo system design transformation目录摘要 (i)Abstract (ii)绪论 (1)1 概述 (2)1.1 数控铣床工作台(X-Y)轴参数 (2)1.2 总体方案设计 (2)2 设计计算 (5)2.1计算切削分力及其额定功率 (5)2.2导轨摩擦力的计算 (6)2.3计算滚珠丝杠螺母副的轴向负载力 (6)2.4滚珠丝杠的动载荷计算与直径估算 (6)2.4.1确定滚珠丝杠的导程 (6)2.4.2计算滚珠丝杠螺母副的平均转速和平均载荷 (6)2.4.3确定滚珠丝杠预期的额定功率 (7)2.4.4按精度要求确定允许的滚珠丝杠的最小螺纹底径 (7)2.4.5初步确定滚珠丝杠螺母副的规格型号 (8)2.4.6确定滚珠丝杠螺母副的预紧力 (8)2.4.7计算滚珠丝杠螺母副的目标行程补偿值与预紧伸力 (8)2.4.8确定滚珠丝杠螺母副支撑用的规格型号 (9)3 滚珠丝杠螺母副的承载能力校验 (10)3.1滚珠丝杠螺母副临界压缩载荷的校验 (10)3.2滚珠丝杠螺母副临界转速的校验 (10)3.3滚珠丝杠螺母副寿命的校验 (11)4 计算机械传动系统的刚度 (11)4.1机械传动系统的刚度计算 (11)4.2滚珠丝杠螺母副的扭转刚度计算 (12)5 驱动电动机的选用与计算 (13)5.1计算折算到电动机轴上的负载惯量 (13)5.2计算折算到电动机轴上的负载力矩 (13)5.3计算坐标折算到电动机轴上的各种所需的力矩 (14)5.4.选择驱动电动机的型号 (15)6 机械传动系统的动态分析 (16)6.1计算丝杠-工作台纵向振动系统的最低固有频率 (16)6.2计算扭转振动系统的最低固有频率 (16)7 机械传动系统的误差计算与分析 (17)7.1.计算机械传动系统的反向死区 (17)7.2.计算机械传动系统由综合拉压刚度变化引起的定位误差 (17)7.3.计算滚珠丝杠因扭转变形产生的误差 (17)8 确定滚珠丝杠螺母副的精度等级和规格型号 (18)8.1.确定滚珠丝杠螺母副的精度等级 (18)8.2确定滚珠丝杠螺母副的规格型号 (19)9 数控系统 (19)9.1 硬件设计 (19)9.2 步进电机开环伺服原理 (20)9.3 步进电机控制框图 (21)9.4 软件程序设计 (22)结论 (24)参考文献 (25)致谢 (26)绪论进入21世纪,我国机床制造业即面临提升机械制造业水平的需求而引发的制造装备发展的良机,也遭受到进入WTO后激烈的市场竞争的压力,从技术层面上来讲,加速推进数控技术将是解决机床制造业持续发展的一个关键。
基于单片机二维数控实验平台设计与实现
优秀设计基于单片机的二维数控实验台的设计与实现摘要本设计结合机电一体化课程教学环节需要,设计用单片机作为控制系统的X-Y工作台。
通过论述X-Y工作台机械结构设计和控制电路接口设计,阐述了机电一体化设计中的共性和关键技术.基于单片机二维数控系统是以单片机为主体,二维数控实验平台为核心的系统。
主要应用单片机作为控制核心,LED点阵显示芯片与数控系统相结合的系统。
充分发挥了单片机的性能。
其优点硬件电路简单,软件功能完善,控制系统可靠,性价比较高等特点,具有一定的使用和参考价值。
该系统设计是一个开环控制系统,其结构简单.实现方便而且能够保证一定的精度.降低成本,是控制技术的最简单的应用.它充分的利用了单片机软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高.系统设计是利用AT89S51单片机,及27128,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过单片机控制使电机运动从而实现工作台的移动。
关键词:X—Y工作台;单片机;机电一体化设计NC-based single-chip two-dimensional test-bed designand implementationAbstractThe combination of mechanical and electrical design aspects of the integration of teaching needs, the design of control systems with single-chip microcomputer as the XY table. XY table through on the design of mechanical structure and control interface circuit design, mechanical-electrical integration on the design of the common and key technologies.Two-dimensional numerical control system based on single-chip based on single-chip microcomputer as the main body, the experimental two-dimensional numerical control system as the core platform. The main application of single-chip microcomputer as control core, LED dot matrix display system chips with a combination of CNC system. Give full play to the single-chip performance. Advantage of simple hardware circuit, software functions, the control system reliable and cost-effective features such as high, with a certain degree of use and reference value.The system design is an open-loop control system, its simple structure, convenient and can realize. Sure. Reduce cost, is the most simple control technology application. It fully utilize the MCU software and hardware function to realize the control of machine tools, Machine processing expanded, accuracy and reliability is further improved.System design is to use 27128,6264,AT89S51 and memory and 8155 chips, hardware composition in the control system of the hardware written procedures to achieve certain processing function. The basic idea is: through the single-chip microcomputer control make motor sports so as to realize the worktable moving.Key words: X-Y table; singlechip; mechatronics design目录第1章绪论………………………………………………………………………… .11.1课题意义 (1)1.2课题研究主要内容 (1)第2章机械系统设计 (2)2.1设计参数的确定 (2)2.2 总体方案设计 (2)2.2.1传动部件的选择 (3)2.2.2控制系统的设计 (3)2.2.3步进电机的选用 (4)2.2.4滚珠丝杠的设计计算 (5)2.2.5滚动导轨的参数确定 (7)2.2.6 滚动轴承选型…………………………………………………… .82.2.7 滚动导轨刚度及预紧 (9)2.2.8步进电机惯性负载的计算 (9)第3章控制系统设计 (11)3.1 硬件配置 (11)3.2 总体接口设计 (17)3.2.1键盘设计 (17)3.2.2 显示器设计............................................................... .19 3.3 步进电机驱动电路和工作原理 (22)3.4总体程序控制 (23)第4章基于单片机的二维数控实验台的实现 (26)4.1 搭建单片机电路 (26)4.2 调试程序 (27)4.3 单片机控制完成,实现功能要求 (28)总结 (29)致谢 (30)参考文献 (31)第1章绪论1.1课题意义二维数控实验平台系统设计是一个开环控制系统,其结构简单.实现方便而且能够保证一定的精度.降低成本,是控制技术的最简单的应用.它充分的利用了单片机软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高.1.2课题研究主要内容二维数控实验平台系统设计是利用AT89S51单片机,及27128,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过单片机控制使电机运动从而实现工作台的移动。
二维数控工作台设计

图 2 二维数控工作台结构图 1.电机底座 2.X 向步进电机 3.联轴器 4.工作台 5.滚珠丝杠 6.行程天关 7.滚动导轨 8.X 向支座
2.2 电机的选择 2.2.1 选择步距角, 确定脉冲当量
步距角θ=360°( / ZKm ) =360°( / 50*2*4 ) =0.9°
4 总结
基于 GT400 运动控制器的二维数控工作台为用户提供了一 个高度柔性的控制平台, 既允许用户利用运动控制器提供的底层 运动函数库进行电机运动规则和控制方面的实践, 也允许用户利 用 G 代码进行开放式数控系统的研究。实践证明, 本工作台运行 良好, 精度较高, 值得推广。
2.2.5 电机的选择
Design of 2D numerical control worktable
2 TIAN Zhen-ya1, GAO Dong-qiang1, GUO Wen-ju1, WANG Hai-bo1,
(1Shaanxi University of Science & Technology, Xi’ an 710021, China ) (2Northwest Institute For Non-ferrous Metal Research, Xi’ an 710021, China ) 【摘 要】简述了基于 GT-400 运动控制器的二坐标联动的开放式数控工作台的基本控制原理, 主 要介绍了机电传动部分以及故障诊断部分的设计, 实践证明该二维工作台实际运行良好, 可以满足一定 的生产及教学实验需要。 关键词: GT-400; 开放式数控工作台; 运动控制器 【Abstract】 The basic principle of a sort of 2D open numerical control worktable which was con- trolled by GT-400 motion controller was introduced. The design of elctromechanical transfer motion and fault diagnosis of the worktable was described mainly. It has been proved that the open numerical control worktable is operating well and it can meet the need of the product and teaching experiment. Key words: GT-400; Open numerical control worktable; Motion controller 中图分类号: TH12, TP27 文献标识码: A
二维精密工作台设计

⼆维精密⼯作台设计⽬录第⼀节《测控仪器课程设计》要求 (1)第⼆节国内外现状 (2)第三节⽅案设计 (5)第四节测量控制⽅法设计 (13)第五节未来展望与总结 (18)参考⽂献 (20)第⼀节《测控仪器课程设计》要求⼀课程设计⽬的:测控仪器课程设计是⼀次⽐较完整的仪器设计,它是理论联系实际、培养初步设计能⼒的重要教学环节,完成课程设计的⽬的有⼀下⼏点:(1)培养学⽣综合地考虑使⽤、经济、⼯艺、安全性等⽅⾯的设计要求,确定合理的设计⽅案。
(2)测控仪器设计是综合光学,电学,机械学,控制等多门课程的⼀个系统⼯程,培养学⽣从全局出发,体会各个学科融合的⼀次实战演练。
(3)培养学⽣仔细阅读本课程指导书和随时查阅有关教材。
(4)通过分析⽐较吸取现有结构中的优点,并在此基础上发挥⾃⼰的创造性,⽽不是简单抄袭或没有根据在臆造;(5)培养学⽣制图功底,训练学⽣通过计算参数,最后完成设计制图的能⼒,(6)了解国内外的技术前沿,以及现有企业可以提供的各种封装产品技术参数。
⼆课程设计技术要求课题名称:基于CCD边缘检测的⼆维测量系统设计要求:1. ⼆维精密⼯作台系统X轴⾏程范围10mm,分辨率0.1um,精度要求0.5um;Y轴⾏程范围10mm,分辨率0.1um,精度要求0.5um;2. CCD测量系统边缘识别,精度要求1um;三设计说明书要求1.根据设计任务要求,确定设计⽅案。
2. 详细讨论系统各部分的实现⽅法和原理。
3.按照技术指标要求计算相应的机械结构参数,有国家标准的零部件,过计算选取。
4.完成设计说明书⼀份,仪器⼯作原理图⼀张,总装配图⼀张(0号),零件图5张以上。
5.提交设计报告书。
要求打印,并列出参考⽂献。
设计说明书要求5000字。
第⼆节国内外现状⼀⼆维精密⼯作台系统随着微电⼦⼯程、计量科学与技术、精密加⼯、纳⽶科学与技术等领域的发展,使微纳⽶定位机构得到了越来越⼴泛的应⽤,各国不断发展微动定位的⼯作,不仅要求有⾼的定位精度,⽽且要求在⽐较⼤的范围内做测量。
课程设计--二维数控精密工作台
精密机械与仪器设计课程设计说明书二维数控精密工作台姓名:学号:专业班级:指导教师:2012.7.5目录1.绪论 (3)课程设计的设计要求 (3)本课题设计内容 (4)本课题设计的目的和意义 (4)2.总体设计方案 (5)设计任务 (5)总体方案确定 (5)2.1二维数控精密工作台的原理 (6)2.2设计的整体方案 (7)2.2.1工作台总体结构的确定 (7)2.2.2传动方案的确定 (7)2.3绘制总体方案图 (7)3.机械系统的设计计算 (8)3.1滚珠丝杆选择 (8)3.1.1滚珠丝杆工作长度计算 (8)3.1.2工作台外形尺寸及重量估算 (9)3.1.3计算载荷 (10)3.1.4额定动载荷计算 (12)3.1.5稳定性校核 (13)3.1.6滚珠丝杆副的刚度计算 (14)3.2滚动直线导轨选择 (14)3.2.1导轨额定寿命计算 (14)3.2.2导轨工作载荷计算 (15)3.3联轴器的选择 (16)3.3.2联轴器的选定 (17)3.4轴承选择 (17)3.5步进电机的计算与选型 (18)3.6系统整体性能计算 (19)3.6.1步进电机轴上总当量负载转动惯量计算 (19)3.6.2系统刚度计算 (20)3.6.3系统固有频率计算 (21)3.6.4系统死区误差计算 (21)3.6.5由系统刚度变化引起的定位误差计算 (21)4.零件图 (22)4. 1滚珠丝杠 (22)4.2导轨 (23)5.总结 (24)6.参考文献 (25)1.绪论现代科学技术的不断发展,极大地推动了不同学科的交叉与渗透,导致了工程领域的技术革命与改造。
在机械工程领域,由于微电子技术和计算机技术的迅速发展及其向机械工业的渗透所形成的机电一体化,使机械工业的技术结构、产品机构、功能与构成、生产方式及管理体系发生了巨大变化,使工业生产由“机械电气化”迈入了“机电一体化”为特征的发展阶段。
X-Y数控工作台是许多机电一体化设备的基本部件,如数控车床的纵—横向进刀机构、数控铣床和数控钻床的X-Y工作台、激光加工设备的工作台、电子元件表面贴装设备等。
CNC二维工作平台设计说明书解读

目录第一章 CNC二维工作平台的总体结构特点 (1)1.1 CNC工作台的结构类型及设计 (1)1.2 拟定合理的传动方案 (3)1.3 控制电机的介绍 (3)1.4 伺服系统 (4)1.5 联轴器的选择 (4)第二章螺旋传动结构设计及电机型号的具体选择 (6)2.1 滚珠丝杠螺母机构介绍 (6)2.2 丝杠螺母副设计及电机选择 (7)第三章轴承的类型及其支撑方式设计 (11)3.1 轴承的类型介绍和具体选择 (11)3.2 确定轴承的尺寸 (11)3.3 对于轴承进行强度校核 (12)3.4 选择轴承的润滑方式 (13)第四章导轨的设计 (14)4.1 导轨的类型概述和选择 (14)4.2 导轨的设计 (15)4.3 导轨的刚度校核 (15)第五章其他技术说明 (16)5.1 装配、拆装、安装的注意事项及工作环境要求 (16)参考文献 (17)第一章 CNC二维工作平台的总体结构特点CNC二维工作平台的总体设计是对此机器的总体布局和全局的安排以及简单零件设计。
总体设计的合理与否对设计有重要意义,也将影响机器的尺寸大小、性能、功能以及设计质量。
1.1 CNC工作台的结构类型及设计1.1.1 CNC二维工作平台的组成、结构、特性(一)CNC工作平台的主要组成。
CNC二维工作台主要是由工作台滑板(滑块)、直线移动导轨、螺旋传动(丝杠)机构、驱动电机、控制装置、位移检测器、和机体(机座)组成。
(二)CNC工作平台的结构。
CNC工作平台的结构有两种分类方法:(1)按电机与机座、工作台滑板的相对位置分为三种:1.驱动电机与X方向(或Y方向)工作台滑板连成一体。
这种形式简单,但造成低层驱动重量大,电机振动会影响工作台的精度,它适用于低速传动。
2.下层电机不与工作台连成一体,而是装在机座上,上层电动机则与工作台滑板连在一起。
这种形式结构复杂,但是减少了下层电机的驱动重量,适用于中、高速传动,应用较广。
3.将全部电机放在机座上,电机通过一套较长的传动装置驱动工作台移动,这样的结构虽然减轻了下层工作台的承载重量和电机振动的影响,但却影响了传动系统的刚度和运动速度的提高。
基于单片机的二维数控实验台的设计与实现

基于单片机的二维数控实验台的设计与实现摘要本设计结合机电一体化课程教学环节需要,设计用单片机作为控制系统的X-Y工作台。
通过论述X-Y工作台机械结构设计和控制电路接口设计,阐述了机电一体化设计中的共性和关键技术.基于单片机二维数控系统是以单片机为主体,二维数控实验平台为核心的系统。
主要应用单片机作为控制核心,LED点阵显示芯片与数控系统相结合的系统。
充分发挥了单片机的性能。
其优点硬件电路简单,软件功能完善,控制系统可靠,性价比较高等特点,具有一定的使用和参考价值。
该系统设计是一个开环控制系统,其结构简单.实现方便而且能够保证一定的精度.降低成本,是控制技术的最简单的应用.它充分的利用了单片机软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高.系统设计是利用AT89S51单片机,及27128,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过单片机控制使电机运动从而实现工作台的移动。
关键词:X—Y工作台;单片机;机电一体化设计NC-based single-chip two-dimensional test-bed designand implementationAbstractThe combination of mechanical and electrical design aspects of the integration of teaching needs, the design of control systems with single-chip microcomputer as the XY table. XY table through on the design of mechanical structure and control interface circuit design, mechanical-electrical integration on the design of the common and key technologies.Two-dimensional numerical control system based on single-chip based on single-chip microcomputer as the main body, the experimental two-dimensional numerical control system as the core platform. The main application of single-chip microcomputer as control core, LED dot matrix display system chips with a combination of CNC system. Give full play to the single-chip performance. Advantage of simple hardware circuit, software functions, the control system reliable and cost-effective features such as high, with a certain degree of use and reference value.The system design is an open-loop control system, its simple structure, convenient and can realize. Sure. Reduce cost, is the most simple control technology application. It fully utilize the MCU software and hardware function to realize the control of machine tools, Machine processing expanded, accuracy and reliability is further improved.System design is to use 27128,6264,AT89S51 and memory and 8155 chips, hardware composition in the control system of the hardware written procedures to achieve certain processing function. The basic idea is: through the single-chip microcomputer control make motor sports so as to realize the worktable moving.Key words: X-Y table; singlechip; mechatronics design目录第1章绪论………………………………………………………………………… .11.1课题意义 (1)1.2课题研究主要内容 (1)第2章机械系统设计 (2)2.1设计参数的确定 (2)2.2 总体方案设计 (2)2.2.1传动部件的选择 (3)2.2.2控制系统的设计 (3)2.2.3步进电机的选用 (4)2.2.4滚珠丝杠的设计计算 (5)2.2.5滚动导轨的参数确定 (7)2.2.6 滚动轴承选型…………………………………………………… .82.2.7 滚动导轨刚度及预紧 (9)2.2.8步进电机惯性负载的计算 (9)第3章控制系统设计 (11)3.1 硬件配置 (11)3.2 总体接口设计 (17)3.2.1键盘设计 (17)3.2.2 显示器设计............................................................... .19 3.3 步进电机驱动电路和工作原理 (22)3.4总体程序控制 (23)第4章基于单片机的二维数控实验台的实现 (26)4.1 搭建单片机电路 (26)4.2 调试程序 (27)4.3 单片机控制完成,实现功能要求 (28)总结 (29)致谢 (30)参考文献 (31)第1章绪论1.1课题意义二维数控实验平台系统设计是一个开环控制系统,其结构简单.实现方便而且能够保证一定的精度.降低成本,是控制技术的最简单的应用.它充分的利用了单片机软件硬件功能以实现对机床的控制;使机床的加工范围扩大,精度和可靠性进一步得到提高.1.2课题研究主要内容二维数控实验平台系统设计是利用AT89S51单片机,及27128,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能.其基本思想是:通过单片机控制使电机运动从而实现工作台的移动。
精密二维工作台双闭环控制系统设计
8 5 计 数 器 为 核心 速 度 检 测 系统 。4 以锯 为 两 光 栅 刻 线 夹 角 , 位 为弧 度 。 光 栅 的 23 () 单
外 形尺寸 : 50 m 长 0 r X宽 30 m; 作 齿波 发 生 器 、DAC 8 2 a 0r 工 a 0 3 、比较 器 、逻辑 延 栅 格 宽 度是 直 接 影 响 测 量分 辨 率 和 精 度 的 行程 x= 5mm, t0 10 Y= 5mm; 置控 制精 度 时 环 节 电路 、光 电藕 合 器件 、共 态 互 锁 电 重 要 因素 。 对 于 不 同 的 光 栅 尺 , 铡 量 的 位 其
I 重量。这些指令和元件如果使 用得当 , 运 闭环 P D控 制 方法 以 实 现 工作 台 的精 确定 在 与光 棚 刻 线 大 致 垂直 的 方 向上 形 成亮 暗
用 灵活 , 会 收 到 良好 的 效 果 . 将
位 , 不受 其 他 中间 环 节 的影 响 , 满 足 了 既 还
相 间 的 干 涉 条 纹 , 所谓 莫 尔 条 纹 。随 着 即
定 的 光 敏 器件 上就 会 有 光 的 亮 暗 变 化 , 对
Hale Waihona Puke 条 在 本 文 基 于 位 置 和 速 度 的 双 闭 环 伺 服 实际 测量 中 , 高速 度 、高精 度 、大 行程 测 量 两 光栅 的 相 对 移动 , 纹 也 发生 移 动 , 固
3 1 t 光栅 位 移测 量 的基 本 原理 及传 ..
强抗 干 扰 能 力 、 较 高 测 量 速 度 等 特 点 , 可 与 PC机 之 间 实 现 了异 步 通 信 功 能 。这 样
实 现 动 态 测 量 、 自动 测 试 和 数 字 显 示 功 就 可 以 充 分 体 现本 工作 台系 统单 独使 用 时 感 器 的 选 型 能, 目前 已广 泛 应 用 于 位 移 精 密 测量 和 精 轻 巧 、灵便 的 特 点 , P 和 C机 系统 联 用 时指 光 栅 传 感 器 主要 是 由标 尺 光栅 、指 示
X-Y二维工作台设计
第一章总体设计 (3)1.1 CNC工作台的组成、结构、特点 (3)1.1.1 CNC工作平台的主要组成 (3)1.1.2 CNC工作平台的结构 (3)1.1.3 CNC工作台的特性 (4)1.2合理拟定并选择传动方案 (4)1.2.1 按丝杠与螺母的相对运动分 (4)1.2.2 按摩擦性质不同分类 (5)1.3确定CNC工作台的结构和零部件的类型 (5)1.3.1确定CNC二维工作平台的结构类型 (5)1.4确定导轨类型 (5)1.4.1普通滑动导轨 (6)1.5 选择轴承类型及支撑方式 (7)1.5.1 轴承类型选择 (7)1.5.2 支承方式 (8)1.6 初选联轴器 ...........................................................1.7 初步确定机体结构 .................................................1.8 伺服系统...............................................................1.8.1 开环伺服系统 (9)1.8.2 闭环伺服系统 (9)1.9 选择控制电机 (9)第二章螺旋传动结构及其零件设计 (12)2.1 螺旋传动结构概述 (12)2.2滚动丝杠及螺母设计 (12)2.2.1螺纹滚道型面 (13)2.2.2滚珠返回的循环方式 (14)2.2.3轴向间隙和预紧的调整方法 (15)2.2.4滚珠丝杠副主要尺寸的确定 (16)2.2.5 X和Y方向丝杠的具体设计 (17)第三章装配图设计第一阶段 (24)3.1导轨的设计 (24)3.1.1、滑动导轨设计 (24)3.1.2、滑动导轨的材料及热处理 (24)3.1.3、导轨刚度校核 (25)3.2 确定丝杠轴承的型号、尺寸、润滑方式并校核 (25)3.2.1丝杠轴承的具体选择 (26)3.2.2确定轴承的尺寸 (26)3.2.3对滚动轴承进行校核 (26)3.2.4选择轴承润滑方式 (29)3.3 丝杠、螺母与工作台滑板的联接设计 (29)3.3.1、丝杠与螺母的主要参数 (29)3.3.2、螺母与工作台滑板的联接设计 (30)3.3.3、确定滚珠丝杠的全部几何尺寸 (31)第四章装配图设计第二阶段 (31)第一章总体设计总体设计非常重要,是对一部机器的总体布局和全局的安排。
课程设计-二维数控工作台
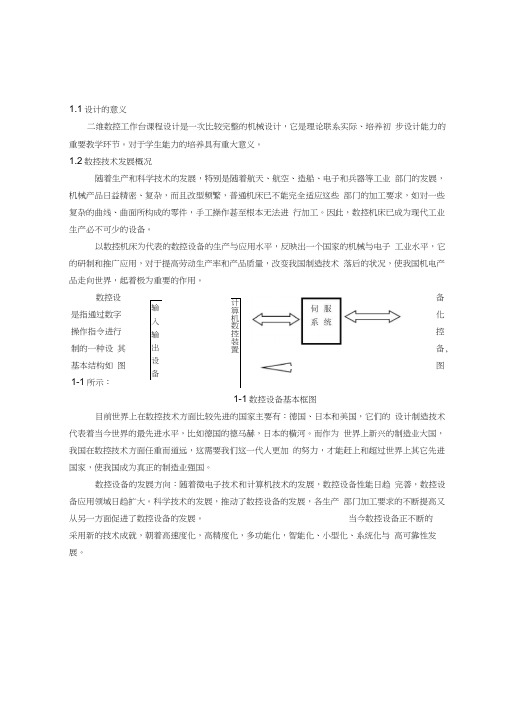
1.1设计的意义二维数控工作台课程设计是一次比较完整的机械设计,它是理论联系实际、培养初 步设计能力的重要教学环节。
对于学生能力的培养具有重大意义。
1.2数控技术发展概况随着生产和科学技术的发展,特别是随着航天、航空、造船、电子和兵器等工业 部门的发展,机械产品日益精密、复杂,而且改型频繁,普通机床已不能完全适应这些 部门的加工要求,如对一些复杂的曲线、曲面所构成的零件,手工操作甚至根本无法进 行加工。
因此,数控机床已成为现代工业生产必不可少的设备。
以数控机床为代表的数控设备的生产与应用水平,反映出一个国家的机械与电子 工业水平,它的研制和推广应用,对于提高劳动生产率和产品质量,改变我国制造技术 落后的状况,使我国机电产品走向世界,起着极为重要的作用。
1-1数控设备基本框图目前世界上在数控技术方面比较先进的国家主要有:德国、日本和美国,它们的 设计制造技术代表着当今世界的最先进水平,比如德国的德马赫,日本的横河。
而作为 世界上新兴的制造业大国,我国在数控技术方面任重而道远,这需要我们这一代人更加 的努力,才能赶上和超过世界上其它先进国家,使我国成为真正的制造业强国。
数控设备的发展方向:随着微电子技术和计算机技术的发展,数控设备性能日趋 完善,数控设备应用领域日趋扩大。
科学技术的发展,推动了数控设备的发展,各生产 部门加工要求的不断提高又从另一方面促进了数控设备的发展。
当今数控设备正不断的采用新的技术成就,朝着高速度化,高精度化,多功能化,智能化、小型化、系统化与 高可靠性发展。
数控设 是指通过数字 操作指令进行 制的一种设 其基本结构如 图1-1所示:输 入 输 出 设 备计算机数控装置备 化 控 备, 图2 二维数控工作台设计的内容2.1 设计题目:二维数控工作台的设计。
已知条件:工作台的有效行程在150mm-200mm之间,工作载荷10kg,工作平稳。
2.2 设计的内容2.2.1 数控装置总体方案的确定1、数控装置设计参数的确定;2、方案的分析,比较,论证。
基于PC的二维数控实验台的设计与实现

优秀设计基于PC的二维数控实验台的设计与实现[摘要]本论文课题是基于PC机的二维数控实验台的设计与实现,目的是为了了解二维数控实验台的设计方法和特点,以及如何用PC机控制数控实验台的动作,将所学到的理论知识运用到实际设计之中,理论和实践相结合。
本文首先通过对怎样用PC机控制数控实验台的介绍加深人们对PC机控制的了解。
然后对实验台进行分析,最终确定PC机对数控实验台的速度与位移的控制。
在对实验台机械结构进行设计的过程中,主要对滚珠丝杠螺母副和电机进行了计算、选型、校核,确保了机械传动部件的精度和刚度,使之满足系统的要求:通过计算,选择了步进电机驱动。
本设计结合机电一体化课程教学环节需要,设计用微型计算机作为控制系统的X-Y 工作台。
通过论述X-Y工作台机械结构设计和控制电路接口设计,阐述了机电一体化设计中的共性和关键技术.并用VB软件设计了一个实验系统的控制界面,使操作更简便。
关键词:X—Y工作台;微型计算机;机电一体化设计。
PC-based two-dimensional test-bed CNC Design andImplementationAbstract:In this paper, the subject is based on the PC of the two-dimensional test-bed CNC Design and Implementation, In order to understand the purpose of test-bed two-dimensional numerical control design method and characteristics of, PC control, as well as how to test the action of NC, Learned to use the theoretical knowledge to practical design, combination of theory and practice.In this paper, through the PC to control how the introduction of NC test-bed to deepen people's understanding of PLC control. And then an analysis of the test-bed, CNC PC to finalize the test-bed for the speed and displacement control.In the mechanical structure of the experimental design process, Vice-principal of the ball screw and motor calculated, selection, checking to ensure the accuracy of mechanical transmission components and stiffness, So as to meet the system requirements: through the calculation, select the stepper motor driver.Originally design combining electromechanics' integrated course teaching link to need , design the X-Y workstable which use microcomputer as the control system.. Through expounding the design of the of the X-Y workstable’s mechanical structural and the interface of the control circuit, have explained the generality and the key technology in the electromechanical integrated design. And design one control interface of the experimental systenm with the VB sofeware, which make operating more simple and more convenient.Key words:The X-Y workstable;Microcomputer;electromechanical integrated design目录1前言 (1)1.1设计课题的意义 (1)1.2设计任务的介绍 (1)1.3基于PC机实验台的组成 (1)2总体方案的确定 (3)2.1设计参数 (3)2.2机械传动部件的选择 (3)2.3控制系统的设计 (4)3机械传动部分的设计计算与选型 (5)3.1导轨上移动部件的重量估算 (5)3.2直线滚动导轨副的计算与选型 (5)3.2.1滑块承受工作载荷F的计算及导轨型号的选取 (5)max3.2.2额定寿命的计算 (5)3.3滚珠丝杠螺母副的计算与选型 (6)3.3.1最大工作载荷F的计算 (6)m3.3.2最大动载荷F的计算 (6)Q3.3.3初选型号 (6)3.3.4传动效率的计算 (7)3.3.5刚度的校验 (7)3.3.6压杆稳定性校验 (7)3.4步进电动机的计算与选型 (7)3.4.1计算加在步进电机转轴上的总转动惯量J (8)eq3.4.2计算加在步进电机转轴上的等效负载转矩T (9)eq4 X-Y工作台与PC的接口设计 (13)4.1 接口设计 (13)4.1.1 8255A与步进电机的连接 (13)4.1.2 ADC与微机的连接和传感器的选用 (13)4.1.3 编写接口的初始化程序 (14)4.1.4 8255A初始化程序 (14)4.1.5 8259A初始化程序 (14)4.1.6 从端口A输出8位数据并启动ADC0809 (14)4.1.7 40H类型中断服务程序 (14)4.2步进电机驱动程序 (15)4.2.1步进电机的控制电路原理及控制字 (15)4.2.2步进电机正反转及转速控制程序 (15)5 插补程序设计 (17)5.1 逐点比较法的插补原理 (17)5.1.1 偏差判别 (17)5.1.2 坐标进给 (17)5.1.3 重新计算偏差 (17)5.1.4 终点判别 (17)5.2直线的逐点比较法插补 (17)5.2.1 偏差计算公式 (17)5.2.2 终点判断方法 (18)5.2.3 直线插补程序 (20)5.3 圆弧的逐点比较法插补 (21)5.3.1 偏差计算公式 (21)5.3.2 终点判断方法 (22)5.3.3 圆弧插补程序 (23)6 实验系统的控制程式和界面 ........................... . (32)总结 (40)致谢 (41)参考文献 (42)第一章前言1.1设计课题的意义机电一体化毕业设计在机电一体化专业教学中占有重要位置,它关系到学生知识的综合运用和学生动手能力的培养及机电产品开发的能力。
优秀机械毕业设计二维步进单片机控制工作台机械系统设计(含全套cad图纸)

单片机控制的 X-Y 工作台系统可以设计为开环,半闭环和闭环伺服系统三种。本设计 采用开环伺服系统,通过单片机控制步进电动机的驱动,经传动机构动带动工作台的运动。 系统没有检测装置。机械结构设计首先根据工作台的最大载荷,选取导轨副,设计工作台, 然后进行结构设计,受力分析,转矩计算,画出工作台的装配草图,再选择步进电动机的 型号,进而设计选择滚珠丝杠,最后设计出 X-Y 工作台,画出其装配图。 关键词 工作台;步进电机;脉冲当量;步距角
2 方案原理的设计.......................................................................................................................... 6 2.1 总体方案的选择和说明........................................................................................................ 6 2.2 总体方案实现的系统组成框图............................................................................................ 7
III
徐州工程 学院毕业设计 (论文 )
目录
1 绪论.............................................................................................................................................. 1 1.1 课题研究的背景.................................................................................................................... 1 1.2 工作台的分类........................................................................................................................ 1 1.3 本设计工作台的作用和特点................................................................................................ 3 1.4 步进电机的发展现状............................................................................................................ 3 1.5 单片机的发展现状................................................................................................................ 5
二维交流伺服数控控制工作台机械系统设计
图书分类号:密级:毕业设计(论文)二维交流伺服数控控制工作台机械系统设计THE MECHANICAL SYSTEM DESIGN OF TWO-DIMENSIONAL EXCHANGE SERVO NUMERICAL CONTROL CONTROL WORK TABLE学生姓名学院名称机电工程学院专业名称机械设计制造及其自动化指导教师毛瑞卿2008年6月2日徐州工程学院学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期: 2008 年 6月1日徐州工程学院学位论文版权协议书本人完全了解徐州工程学院关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归徐州工程学院所拥有。
徐州工程学院有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
徐州工程学院可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要随着现代信息技术的发展,以提高产品加工的生产效率为主的高度自动化和以提高ch产品的质量为主的精密化成为现代机械加工技术发展的两个主要方向。
人们对航空机、数控机床、精密仪器和仪表以及各种精密机械设备提出了越来越高的精度要求,X-Y作台是这些设备实现高精密加工的核心部件,对于提高产品的加工质量起着尤为重要作用。
对,涉及到伺服电机的选型,滚珠丝杠副的选型、强度校核及其生产设计中应注意的问题,连接伺服电机和滚珠丝杠副的联轴器的选型与校核,支承件轴承的设计,导轨及机架的设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Design of 2D numerical control worktable
2 TIAN Zhen-ya1, GAO Dong-qiang1, GUO Wen-ju1, WANG Hai-bo1,
(1Shaanxi University of Science & Technology, Xi’ an 710021, China ) (2Northwest Institute For Non-ferrous Metal Research, Xi’ an 710021, China ) 【摘 要】简述了基于 GT-400 运动控制器的二坐标联动的开放式数控工作台的基本控制原理, 主 要介绍了机电传动部分以及故障诊断部分的设计, 实践证明该二维工作台实际运行良好, 可以满足一定 的生产及教学实验需要。 关键词: GT-400; 开放式数控工作台; 运动控制器 【Abstract】 The basic principle of a sort of 2D open numerical control worktable which was con- trolled by GT-400 motion controller was introduced. The design of elctromechanical transfer motion and fault diagnosis of the worktable was described mainly. It has been proved that the open numerical control worktable is operating well and it can meet the need of the product and teaching experiment. Key words: GT-400; Open numerical control worktable; Motion controller 中图分类号: TH12, TP27 文献标识码: A
由以上结果选用 VRDM397/LHA 三项混合式步进电机, 其技 术参数如下: JM =0.7×10-4Kgcm2 得: TM=1.827 (Nm ) 综上所述: 可选该 VRDM397/LHA 型电机。
3 故障诊断设计
通过对机械状态测试、 数据分析与故障诊断, 可以确定机械 的实时工作状态及所需的各种参数, 以及确定机械的故障形式和 故障部位, 直至检测出发生故障的零部件或元器件, 从而可以对有 故障的机械进行快速监测和维修。通过对 GT400 运动控制器的二 次开发, 利用其提供的底层控制函数能够进行故障的识别和排除。 故障诊断就其诊断内容来说极为广泛, 包含有命令, 运行参 数, 轴的运行失调等。故障诊断模块的主要功能是当主机向运动 控制器发送命令出错时, 显示出错的原因, 根据出错的原因, 排除
*来稿日期: 2008-04-22
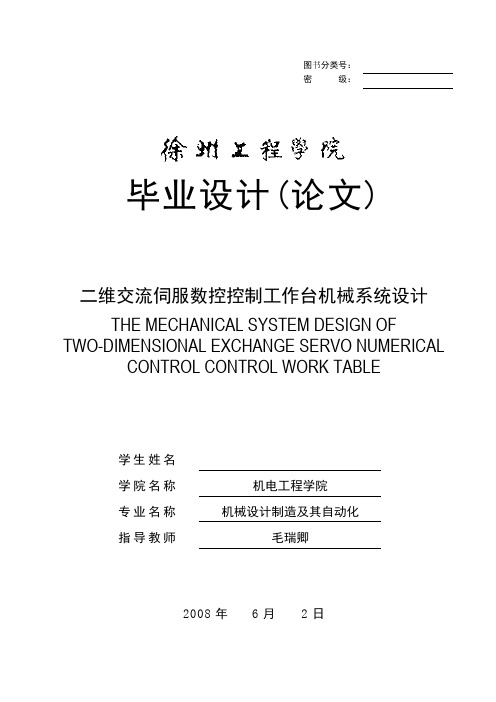
图 2 二维数控工作台结构图 1.电机底座 2.X 向步进电机 3.联轴器 4.工作台 5.滚珠丝杠 6.行程天关 7.滚动导轨 8.X 向支座
2.2 电机的选择 2.2.1 选择步距角, 确定脉冲当量
步距角θ=360°( / ZKm ) =360°( / 50*2*4 ) =0.9°
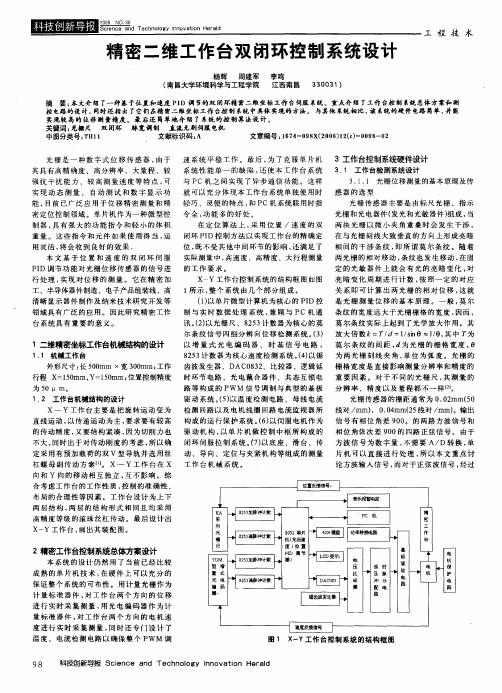
1 工作台控制系统原理
二坐标数控工作台采用 PC+运动控制卡的开环控制系统, PC 机作为上位机,主要起到管理系统的作用,主要负责人机交 数据处理、 通讯控制、 图形显示、 动态仿真、 系 互, 用户信息管理、 统状态检测等工作, 下位机采用 GT400 运动控制卡, 通过连接板 使步进电机驱动器与 GT400 运动控制卡连接, 从而控制电机, 达 到对工作台较为精确的控制, 控制系统原理图, 如图 1 所示。 工作 台主要参数如下: (1 ) 工作台行程为: X 坐标±100mm, y 坐标±80mm; (2 ) 最大工 2.5m/min; (3 ) 快进速度: 5m/min; ( 4 ) 工作台上工作台 作进给速度: ( x 向工作台 ) 的长宽分别为 ( 500×300 ) mm 厚度为 50mm; (5 ) 下工作 台 (y 向工作台 ) 的长宽为 (600×300 ) mm 厚度为 50mm。
电动机工作频率: f= 360iv Pθb 式中: v —工作台移动速度; P —滚珠丝杠导程; θb —电动机步距角; i —减速比。 由快速进给速度 Vmax=5m/min, 因此可得: fmax=5000HZ
2.2.3 根据负载转拒或阻力选择步进电机转距
(1 ) 负载转距的计算: Ti = 1 × ( FP + μ0F0P ) = i 2π η 2π 1 × ( 525×0.005 + 0.2×350×0.005 ) =0.52Nm 1 2π×0.9 2π 其中, F=Fa + μw=375+0.1×1500 =525N 式中: F0 —丝杠预紧力。 (2 ) 转动惯量的计算: ①丝杠的转动惯量: 4 JB = π × ρLBDB = π × 7.9×10-3×74×2.54=2.24Kgcm2 32 32 2 2 ②工作台惯量: Jt =W ( P ) =153× ( 0.5 ) =0.96Kgcm2 2π×i 2π ③负载惯量: Jt =JB +Jt = 3.2Kgcm2
4 总结
基于 GT400 运动控制器的二维数控工作台为用户提供了一 个高度柔性的控制平台, 既允许用户利用运动控制器提供的底层 运动函数库进行电机运动规则和控制方面的实践, 也允许用户利 用 G 代码进行开放式数控系统的研究。实践证明, 本工作台运行 良好, 精度较高, 值得推广。
2.2.5 电机的选择
X 正负向 限位开关 GT400 运 动控制卡 驱动器1 连接板 驱动器2 Y 正负向 限位开关 步进电机2 Y 轴工作平台 X 轴工作平台 步进电机1
结构与此类似 ) , 如图 2 所示。工作台在滚 机构, (Y 向图中未示, 动导轨上滚动, 采用开环控制。步进电机驱动器采用雷塞 535 型 驱动器。该驱动器内部采用类似伺服控制原理的电路, 此电路可 以使电机低速运行平稳, 几乎没有震动和噪音, 电机在高速时力 矩大大高于二相和五相混合式步进电机,定位精度最高可达 30000 步/转。换向机构采用型号为 FYC2D2504-3 的滚珠丝杠, 固定方式为一端固定, 一段有隙, 其优点在于压杆稳定和临界转校 高, 而且丝杠有热膨胀的余地。支承形式采用 7603020TVP60 接触 角角接触球轴承一对, 背靠背组合的形式。滚动直线导轨副是在滑 块与导轨之间放入适当的钢珠, 使滑块与导轨之间的滑动摩擦变为 滚动摩擦大大降低二者之间的摩擦阻力, 有助于提高数控系统的相 因此在 x、 y 向用滚动导轨副, 型号为HJG-D25。 根据 应度与灵敏度。 工作台精度要求及尺寸选型号为 JG35L-F15TB,尺寸大小为 (35×33×70 ) mm 的电感定位开关作为该数控工作台的检测原件。
第2期 2009 年 2 月
文章编号: 1001-3997 (2009 ) 02-0179-02
机械设计与制造 Machinery Design & Manufacture
179
二维数控工作台设计
2 田振亚 1 高东强 1 郭文举 1 王海波 1,
(1 陕西科技大学 机电工程学院, 西安 710021 ) (2 西北有色金属研究院, 西安 710021 )
2.2.4 电机转距
启动转距: 如果在 100ms 内电机从 f1=0 加速到 f2=10000HZ, 则电机所需转距为: )= 2π×395 (JM +3.2 )=0.133+413.6J M JM +JL Ts= 2π×N( M 60t1 60×0.1 必须转距为: TM = (Ts+T) (Ts+T) (0.52+0.133+413.6JM ) ×2 l ×S= l ×2= =1.306+827.2JM 式中: S —安全系数, 一般取 2; JM —电机转子惯量。
180
根据上式选择步进电机步距角 0.9° 取滚珠丝杠的螺距 4mm
田振亚等: 二维数控工作台设计
面, 如图 3、 4 所示。
第2期
故障使系统恢复正常工作, 故障诊断人机交互界面和故障诊断界
脉冲当量=0.9*4/360*1=0.01mm 满足精度要求 (i=1 )
2.2.2 快速进给速度确定步进电动机的最高工作频率
4 5
机
3
2 1 6 8 7
电源电压
图 1 控制系统原理
2 机电传动系统
2.1 系统设计
传动部分主要利用步进电机 2 (型号为 VRDM397/LHA ) 作为 动力源输出转矩,电机输出轴通过联轴器 3 与滚珠丝杠 5 相联 接, 最后通过滚珠螺母带动工作台 X 向或 Y 向运动, X 向工作台
图 3 人机交互界面
系统参数设置 NC 代码编程 图形轨迹显示 手动操作 单轴运动 多轴运动 状态显示 故障诊断
通讯出错! ! !
故障清除
图 4 故障诊断界面
为适应工作台的工作要求,将诊断部分的设计分为通讯出 错; 命令错误; 圆弧插补半径不正确; 直线插补长度为零或超出控 制器处理范围等几个模块。 用户通过主机发出命令, 运动控制器在检查校验后会给出一 个反馈, 这个反馈就是命令 (库函数 ) 的返回值。根据返回的值在 界面上显示相应的故障原因。比如, 返回值为-1 时, 显示通讯出 错; 返回值为 0 时, 显示命令执行成功; 返回值为 1 时, 显示命令 错误; 此时调用 GT-Get (mdstsc ) 命令, 进一步确定出错原因, 显示 在命令出错函数的下一行, 当出现命令错误时, 通过判断命令错 误寄存器中的位, 把可能引起命令错误的原因显示在界面上。
参考文献
1 深圳固高科技有限公司. GT 系列运动控制器编程手册 [ M] , 2002 2 濮良贵主编. 机械设计. 北京: 高等教育出版社, 2002 3 陈婵娟. 数控机床设计 [ M] . 北京: 化学工业出版社, 2006 4 孙志勇, 赵砚江. 数控与电控技术 [ M] . 北京: 机械工业出版社, 2006 5 任玉田, 焦振学, 王宏甫. 机床计算机数控技术. 北京: 北京理工大学出版 2002 社, 魏仁选, 陈幼平. 开放式控制系统的现状、 趋势及对策 [J] . 中国机 6 周祖德, 械工程, 1999, 1 (10 ) : 1090~1093 7 丁富强等. 基于 PC 机的高性能数控系统的研究 [ J] . 机械与电子, 2000 (1 ) : 33~35