机械原理课程设计-牛头刨床(完整图纸)
机械原理课程设计牛头刨床
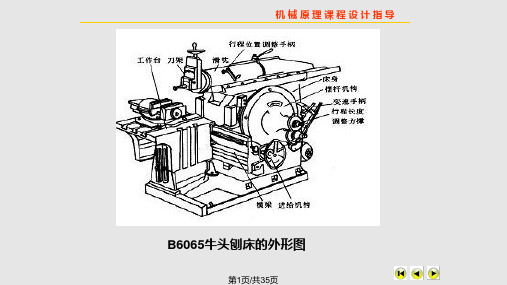
机械原理课程设计——牛头刨床(速度分析与受力分析附于最后)说明书姓名:分析点:4,10点组号:第3组2011 年 7 月 15日工作原理 (3)一.设计任务 (4)二.设计数据 (4)三.设计要求 (4)1、运动方案设计 (4)2、确定执行机构的运动尺寸 (4)3、进行导杆机构的运动分析 (5)4、对导杆机构进行动态静力分析 (5)四.设计方案选定 (5)五. 机构的运动分析 (6)1. 4点速度分析,加速度分析 (7)2. 10点速度,加速度分析 (9)六.机构动态静力分析 (11)七.数据总汇并绘图 (13)九.参考文献 (16)工作原理牛头刨床是一种用于平面切削加工的机床,如图a)所示。
电动机经过皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头左行时,刨刀不切削,称为空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回运动的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作过程中,受到很大的切削阻力(在切削的前后各有一段0.05H的空刀距离,见图b),而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速转动,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量。
(a) (b)图d一.设计任务1、运动方案设计。
2、确定执行机构的运动尺寸。
3、进行导杆机构的运动分析。
4、对导杆机构进行动态静力分析。
5、汇总数据画出刨头的位移、速度、加速度线图以及平衡力矩的变化曲线。
二.设计数据本组选择第六组数据表1表2三.设计要求1、运动方案设计根据牛头刨床的工作原理,拟定1~2个其他形式的执行机构(连杆机构),给出机构简图并简单介绍其传动特点。
2、确定执行机构的运动尺寸根据表一对应组的数据,用图解法设计连杆机构的尺寸,并将设计结果和步骤写在设计说明书中。
机械原理课程设计——牛头刨床

机械能变化曲线:
飞轮设计:
V
A4
=
A2 A4 A2
速度图解法:
V1A+V12=V 2A VF+VFB=V 2B V2B=βV 2A Β为常数比
加速度图解分析: a4An+a4Ar+a24Ar+ak24A =a2A 大小 方向
a4b+aF4Br=aF a4A=βV 4B
进给凸轮机构设计
主体机构设计
牛头刨床主体机构
主体结构设计
设计要求
(1)刨刀工作行程要求速度比较平稳,空回行程时 刨刀快速退回,机构行程速比系数在1.4左右。 (2)刨刀行程H=300mm或H=150mm。曲柄转速、 切削力、许用传动角等见表1,每人选取其中一组数据。 (3)切削力P大小及变化规律如图1所示,在切削行 程的两端留出一点空程。具体数据如下:
主体机构
电机转速n(r/mi n)
切削力P(N)
75
许用传动角[γ]
H=150mm
4500N
45°
刨刀行程:H=150 速比系数:K=1.4
主体机构(方案一)
方案一: 摆动导杆机构与摇杆滑块机构组合机构
机构简图:
计算机构的自由度 F=3×5-2×7=1
主体机构(方案一)
机构尺寸的计算:
在满足压力角条件确定基圆半径,摆杆中心间的中心距。
• 推程许用压力角为[α]= 38°; • 回程许用压力角为[α’]= 65°; • 试凑法:对照摆杆长度为L,赋值基圆半径, 中心距a=90,r0=50;经试验符合要求
滚子半径rf:rf<ρ mi n -3(mm)及rf<0.8ρ mi n(mm) 方法1用图解法确定凸轮理论廓线上某点A的曲率半径R: 以A点位圆心,任选较小的半径r 作圆交于廓线上,在圆A 两边分别以理论廓线上的B、C为圆心,以同样的半径r 画圆,三个小圆分别交于E、F、H、M四个点处。过E、 F H、M O点 O点近似为凸轮廓线上A OA。并且曲率中心肯定在曲线过A 点的法线上。可以通 过法线与直线EF或HM的交点求曲率中心。
(完整版)武汉理工机械原理课程设计牛头刨床1‘69
目录牛头刨床机构的分析与综合 .................................................................................................. 1设计题目及原始数据...............................................................................................................1.1 题目:牛头刨床机构的分析与综合 ..............................................................................1.2 原始数据..........................................................................................................................1.3 名称符号的意义 .............................................................................................................. 2机构运动简图........................................................................................................................... 3导杆机构的尺寸综合 ...............................................................................................................3.1已知数据...........................................................................................................................3.2设计步骤........................................................................................................................... 4导杆机构的运动分析 ...............................................................................................................4.1已知数据...........................................................................................................................4.2设计步骤...........................................................................................................................4.2.1 位置划分 ......................................................................................................................4.2.2 1’,6,9位置的运动分析.....................................................................................4.2.3 运动分析结果汇总表 ................................................................................................ 5导杆机构动态静力分析 ...........................................................................................................5.1已知数据 ...........................................................................................................................5.2 设计步骤 .........................................................................................................................5.2.1惯性力及力矩结果汇总表...........................................................................................5.2.2求齿轮的重量..............................................................................................................5.2.3 1’,6,9位置动态静力分析....................................................................................5.2.4 动力分析结果汇总表 ................................................................................................ 6齿轮机构设计计算 ...................................................................................................................6.1 已知数据 ........................................................................................................................6.2 设计步骤 ........................................................................................................................6.2.1 确定变位系数 .............................................................................................................6.2.2 计算齿轮几何尺寸 .....................................................................................................牛头刨床机构的分析与综合1设计题目及原始数据1.1 题目:牛头刨床机构的分析与综合1.2 原始数据1.3 名称符号的意义第1页第2页c F刨头所受切削阻力p Y切削阻力 FC 至 O2 的垂直距离 2n曲柄 2,齿轮 5 及凸轮 7 的转速 m齿轮 4、5 的模数 4Z ,5Z分别为齿轮 4、5 的齿数2机构运动简图第3页3导杆机构的尺寸综合3.1已知数据 3.2设计步骤1.导杆机构的极位夹角θ与导杆的最大摆角ψ:2.求导杆长O3L B :3.求曲柄长2O A L :4.求连杆长BF L :5.求刨头导路 x —x 至 3O 点的距离 3O M L ;从受力情况(有较大的传动角)出发,x —x 常取为通过12B B 的扰度DE 的中点M 。
机械原理课程设计牛头刨床讲解
机械原理课程设计——牛头刨床(速度分析与受力分析附于最后)说明书姓名:分析点:4,10点组号:第3组2011 年 7 月 15日工作原理 (3)一.设计任务 (4)二.设计数据 (4)三.设计要求 (4)1、运动方案设计 (4)2、确定执行机构的运动尺寸 (4)3、进行导杆机构的运动分析 (5)4、对导杆机构进行动态静力分析 (5)四.设计方案选定 (5)五. 机构的运动分析 (6)1. 4点速度分析,加速度分析 (7)2. 10点速度,加速度分析 (9)六.机构动态静力分析 (11)七.数据总汇并绘图 (13)九.参考文献 (16)工作原理牛头刨床是一种用于平面切削加工的机床,如图a)所示。
电动机经过皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头左行时,刨刀不切削,称为空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回运动的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作过程中,受到很大的切削阻力(在切削的前后各有一段0.05H的空刀距离,见图b),而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速转动,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量。
(a) (b)图d一.设计任务1、运动方案设计。
2、确定执行机构的运动尺寸。
3、进行导杆机构的运动分析。
4、对导杆机构进行动态静力分析。
5、汇总数据画出刨头的位移、速度、加速度线图以及平衡力矩的变化曲线。
二.设计数据本组选择第六组数据表1表2三.设计要求1、运动方案设计根据牛头刨床的工作原理,拟定1~2个其他形式的执行机构(连杆机构),给出机构简图并简单介绍其传动特点。
2、确定执行机构的运动尺寸根据表一对应组的数据,用图解法设计连杆机构的尺寸,并将设计结果和步骤写在设计说明书中。
牛头刨床机械原理课程设计
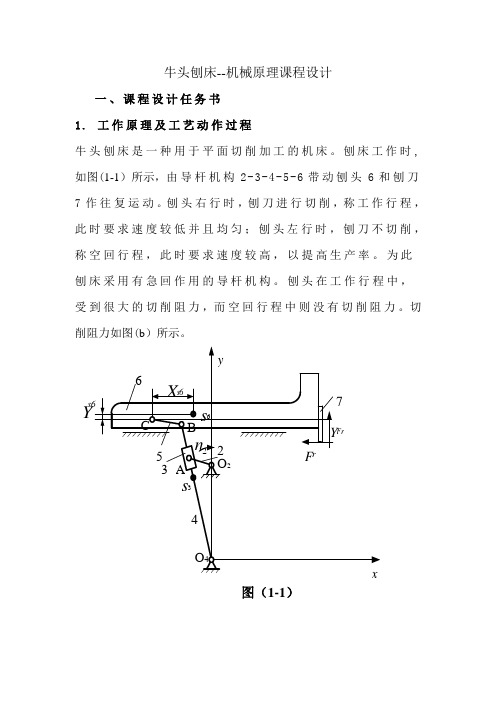
牛头刨床--机械原理课程设计一、课程设计任务书1. 工作原理及工艺动作过程牛头刨床是一种用于平面切削加工的机床。
刨床工作时, 如图(1-1)所示,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
切削阻力如图(b )所示。
O 2AO 4xys 6s 3X s 6CBYs62 3 4 567 n 2F rY Fr图(1-1)F rx0.05H0.05HH(b)、设计说明书1.画机构的运动简图1、以O4为原点定出坐标系,根据尺寸分别定出O2点,B点,C点。
确定机构运动时的左右极限位置。
曲柄位置图的作法为:取1和8’为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如下图)。
图1-2取第I方案的第4位置和第9位置(如下图1-3)。
图 1-32. 对位置4点进行速度分析和加速度分析 (a ) 速度分析 取速度比例尺l μ=mmsm 001.0对A 点: 4A V = 3A V + 34A A V方向:4BO ⊥A O 2⊥ //B O 4大小: ? √ ?4A V =l μ⨯4pa =smmm mmsm673239.0239.673001.0=⨯4ω=AO A l V 44=srmmsm38431.1486334.0673239.0=34A A V =l μ43a a l =smmm mmsm156326.0326.156001.0=⨯V 5B = V 4B =4ω⨯BO l4=sm747530.0对于C 点: C V = B V + CB V 方向: //'XX BO4⊥ BC⊥大小: ? √ ?C V =l μ⨯pcl =mmsm001.0smmm 749708.0708.749=⨯ CBV =l μ⨯bc l =mmsm001.0smmm 0490895.00895.49=⨯5ω=bcl CB l u V =sr363626.0速度分析图:图 1-4(b)加速度分析 选取加速度比例尺为a μ=mmsm2001.0对于A 点:Aa = n A a 4+ t A a 4= 3A a + k A A a 34 + 34rA A a 方向: A →4OB O 4⊥ A →2O B O 4⊥ //B O 4 大小: √ ? √ √ ? 由于3A a =22ωAO l2=234263.4s m KAA a 34=24ω34A A V =2432808.0smnA a 4=24ωAO l4=2931975.0sm 已知,根据加速度图1-5可得:tA a 4=aμ''a n l =2549416.0s m , r AA a 34=a μ''ak l =2298112.3sm 。
机械原理课程设计牛头刨床PPT课件
机械原理课程设计指导
P12 P13 P14 P23 P24 P34
第5页/共35页
机械原理课程设计指导
P12 P13 P14 P23 P24 P34
第6页/共35页
机械原理课程设计指导
P12 P13 P14 P23 P24 P34
第7页/共35页
机械原理课程设计指导
一、课程设计的目的与任务
第14页/共35页
3号坐标图纸
机械原理课程设计指导
第15页/共35页
机械原理课程设计指导
5、凸轮设计 确定凸轮机构的基本尺寸,选 取滚子半径,画出凸轮实际廓线。
根据摆杆加速度线图,作出摆杆位移线图,先 作出盘形凸轮的理论廓线,然后选择滚子半径,作 出实际轮廓廓线。(2号或3号图纸,参见图例)
6、齿轮设计 计算齿轮z2齿数,齿轮副变位 系数及齿轮各部分尺寸。
计划时间 (天) 0.5
2
2
第18页/共35页
机械原理课程设计指导
飞轮设 1.用惯性力法确定安装在轴O2上的飞
计
轮转动惯量JF。
1
凸轮机 1.确定凸轮机构的基本尺寸;
构设计 2.选取滚子半径;
1.5
3.画出凸轮实际廓线。
齿轮机 1.计算齿轮2的齿数;
构设计 2.选择齿轮副的变位系数;
1
3.计算齿轮传动的各部分尺寸。
注意:等效阻抗力矩和等效驱动力矩是计算出来的, 不是从图上量出来的。先计算数据,后按一定的比 例作图。每项数据保留小数点后二位数!
第22页/共35页
机械原理课程设计指导
牛
头
刨
牛床头刨床是一种靠刀具的往复直线运动及工作台的间歇运动来 完成原工件的平面切削加工的机床。电动机经过减速传动装置(皮
机械原理课程设计牛头刨床(完整图纸)
机械原理课程设计牛头刨床(完整图纸)机械原理课程设计说明书系部名称: 机电系专业班级: 04机制三班姓名:学号: 0405110057目录概述 (3)设计项目...............................1.设计题目 (4)2.机构简介 (4)3.设计数据 (4)设计内容·······························1.导杆机构的设计 (5)2.凸轮机构的设计 (12)3.齿轮机构的设计 (17)设计体会 (20)参考文献 (21)附图·····························概述一、机构机械原理课程设计的目的:机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要实践环节。
其基本目的在于:(1)进一步加深学生所学的理论知识,培养学生独立解决有关本课程实际问题的能力。
(2)使学生对于机械运动学和动力学的分析设计有一较完整的概念。
(3)使学生得到拟定运动方案的训练,并具有初步设计选型与组合以及确定传动方案的能力。
(4)通过课程设计,进一步提高学生运算、绘图、表达、运用计算机和查阅技术资料的能力。
二、机械原理课程设计的任务:机械原理课程设计的任务是对机械的主体机构(连杆机构、凸轮机构、齿轮机构以及其他机构)进行设计和运动分析、动态静力分析,并根据给定机器的工作要求,在此基础上设计凸轮、齿轮;或对各机构进行运动分析。
机械原理课程设计--牛头刨床
录第一章设计的任务与原始参数............................................................................................ - 3 -1.1设计任务.......................................................................................................................... - 3 -1.2 原始参数......................................................................................................................... - 4 -第二章运动方案设计·............................................................................................................ - 5 -2.1减速装置的选择............................................................................................................. - 5 -2.2刨刀切削运动的实现结构 ............................................................................................ - 5 -第三章电动机的选择................................................................................................................. - 6 -3.1 确定电机功率P d........................................................................................................... - 6 -3.2 根据P d查得电动机部分型号表选择电动机 ............................................................ - 7 -第四章传动比分配..................................................................................................................... - 8 -4.1计算传动比i和选定减速装置..................................................................................... - 8 -第五章减速机构设计................................................................................................................. - 9 -5.1 总体方案图 .................................................................................................................... - 9 -5.2 减速零件参数........................................................................................................... - 10 -第六章主机构设计................................................................................................................ - 12 -1.1机构运动简图及标号.................................................................................................. - 12 -1.2 极位夹角、曲柄1(杆AB)角速度及各杆件长度计算..................................... - 12 -第七章主机构运动分析.......................................................................................................... - 14 -7.1.位置分析....................................................................................................................... - 14 -7.2.速度分析....................................................................................................................... - 15 -7.3.加速度分析 .................................................................................................................. - 15 -7.4矩阵计算及绘图.......................................................................................................... - 15 -7.5输出图像及数据表格.................................................................................................. - 19 -第八章主机构受力分析........................................................................................................ - 21 -8.1 位置1:θ1=0˚........................................................................................................... - 21 -8.2 位置2:θ1=90˚......................................................................................................... - 24 -8.3 位置3:θ1=270˚ ...................................................................................................... - 26 -第九章主机构的速度波动调节........................................................................................... - 29 -9.1 等效驱动力矩及飞轮质量的计算............................................................................ - 29 -9.2 运用excel函数及绘图处理matlab输出的数据................................................ - 30 -第十章小结............................................................................................................................... - 32 -10.1 心得体会................................................................................................................... - 32 -10.2 参考文献................................................................................................................... - 32 -10.3 致谢 ........................................................................................................................... - 32 -第一章设计的任务与原始参数1.1设计任务●题目:牛头刨床●工作原理:牛头刨床是一种常用的平面切削加工机床,电动机经带传动、齿轮传动(图中未画出)最后带动曲柄1(见图1)转动,刨床工作时,是由导杆机构1-2-3-4-5带动刨头和刨刀作往复运动,刨头5右行时,刨刀切削,称工作行程,此时要求速度较低并且均匀;刨头左行时,不进行切削,称空回行程,此时速度较高,以节省时间提高生产率,为此刨床采用有急回作用的导杆机构。
机械原理课程设计-牛头刨床完整图纸之欧阳索引创编
机械原理课程欧阳索引(2021.02.02)设计说明书系部名称:机电系专业班级:04机制三班姓名:学号:0405110057目录Array概述·······························3设计项目·······························1.设计题目 (4)2.机构简介 (4)3.设计数据 (4)设计内容·······························1.导杆机构的设计 (5)2.凸轮机构的设计 (12)3.齿轮机构的设计 (17)设计体会 (20)参考文献 (21)附图·····························概述一、机构机械原理课程设计的目的:欧阳索引创编2021.02.02机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学阐发与设计的训练,是本课程的一个重要实践环节。
机械原理牛头刨床课程设计--牛头刨床导杆机构的运动分析、动态静力分析
青岛理工大学琴岛学院课程设计说明书课题名称:机械原理课程设计学院:机电工程系专业班级:机械113学号:20110201083学生:张三指导老师:李燕青岛理工大学教务处2013 年 12月 27日《机械原理课程设计》评阅书摘要选取方案三,利用图解法对1点和6电状态时牛头刨床导杆机构进行运动分析、动态静力分析,并汇总本方案所得各位置点的速度、加速度、机构受力数据绘制曲线图。
进行方案比较,确定最佳方案。
将一个班级分为 3 组,每组11人左右,一组选择一个备选方案进行如下分析工作:课程设计内容:牛头刨床导杆机构的运动分析、动态静力分析;(1)绘制机构运动简图(两个位置);(2)速度分析、加速度分析;(3)机构受力分析(求平衡力矩);(4)绘制运动线图。
(上述三项作在一张A1号图纸上)精选文档目录摘要 (I)1设计任务 (1)2导杆机构的基本尺寸确定 (2)3 导杆机构的运动分析 (4)3.1 速度分析 (4)3.2 加速度分析 (5)4导杆机构的动态静力分析 (8)4.1 运动副反作用力分析 (8)4.2 曲柄平衡力矩分析 (10)总结 (11)致谢 (12)参考文献 (13)1设计任务一、课程设计的性质、目的和任务机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要教学环节。
其意义和目的在于:以机械系统运动方案设计为结合点,把机械原理课程设计的各章理论和方法融会贯通起来,进一步巩固和加深学生所学的理论知识;培养学生独立解决有关本课程实际问题的能力,使学生对于机械运动学和动力学的分析和设计有一个较完整的概念,具备计算、制图和使用技术资料的能力。
二、课程设计教学的内容和要求将一个班级进行分组,每组10人左右,一组选择一个备选方案进行如下分析工作:课程设计内容:牛头刨床导杆机构的运动分析、动态静力分析;(1)绘制机构运动简图;(2)速度分析、加速度分析;(1张1号图纸)(3)机构动态静力分析;(4)绘制运动线图。
机械原理课程设计-牛头刨床

2 调整进给机构
控制工件的进给速度,影响加工精度。
3 保养和维护
定期保养设备,确保其正常工作状态。
牛头刨床的操作规程
1. 检查刨床的各项功能是否正常。 2. 确认工件尺寸和切削深度。 3. 调整刀具和工件的位置。 4. 打开刨床电源,开始加工。 5. 完成加工后,关闭刨床电源。
通过进给机构控制工件的进给速度。
牛头刨床的主要零部件
主轴
带动刀具旋转。
进给机构
控制工件的进给速度。
切削机构
完成切削过程。
牛头刨床的工作过程
工件放置
切削过程
将待加工工件放置在工作台上。 切削机构对工件进行切削。
加工完成
获得平整的加工面。
牛头刨床的加工精度控制
1 刀具的选用
选择合适的刀具,保证加工质量。
刨削原理
通过旋转刀具对工件进行切削。
结构
由底座、进给机构、主机等组成。
牛头刨床的分类
按切削方式分类
有手动、半自动和全自动刨床。
按机床结构分类
有卧式、立式和特种刨床。
按加工对象分类
有木工刨床和金属刨床。
牛头刨床的工作原理
1
压板下压
压紧工件,保证加工过程中的稳定性。
2
主轴旋转
带动刀具进行切削。
3
工件进给
机械原理课程设计-牛头 刨床
牛头刨床是一种常见的木工加工设备,具有广泛的应用领域。本课程设计将 介绍牛头刨床的原理、结构、工作过程以及其在工业生产中的重要性。
课程设计背景和意义
1 背景
现代工业对高精度、高效率的加工需求不断增加。
2 意义
通过对牛头刨床的学习和设计,提高学生的机械原理和加工能力。
牛头刨床的原理和结构
牛头刨床ppt课件

7
►设计摆动导杆机构 ►1.计算极位夹角 ►2.计算导杆摆角 ►3.确定铰链中心的位置 ►4.确定曲柄长度
8
3
牛头刨床实物图
4
牛头刨床运动简图
5
曲柄滑块机构————————摆动导杆机构 应用:
6
按给定的行程速比系数K设计四杆机构已知:CD杆长,摆角φ及K,
设计此机构。步骤如下: ①计算θ=180°(K-1)/(K+1);
E θφ
90°-θ
②任取一点D,作等腰三角形
腰长为CD,夹角为φ;
设计牛头刨床主体机构
1
任务:
设计一机构,实现牛头刨床刨削动作。 已知:机架长度50mm, 急回特性系数k=1.5。
2
牛头刨床外形图
牛头刨床主要由床身、滑枕、 刀架、工作台、横梁等组成, 如图所示。因其滑枕和刀架形 似牛头而得名。
牛头刨床外形图
1-工作台2-刀架3-滑枕4-床身5-变速手柄
6-滑枕行程调节柄7-横向进给手柄8-横梁
A
θD
③作C2P⊥C1C2,作C1P使
∠C2C1P=90°-θ,交于P;
P
④作△P C1C2的外接圆,则A点必在此圆上。
⑤选定A,设曲柄为a ,连杆为b ,则:
A C1= a+b ,A C2=b- a => a =( A C1-A C2)/ 2
⑥以A为圆心,A C2为半径作弧交于E,得:
a =EC1/ 2 b = A C1-EC1/ 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理课程设计说明书系部名称: 机电系专业班级: 04机制三班姓名:学号: 0405110057目录概述 (3)设计项目...............................1.设计题目 (4)2.机构简介 (4)3.设计数据 (4)设计内容...............................1.导杆机构的设计 (5)2.凸轮机构的设计 (12)3.齿轮机构的设计 (17)设计体会 (20)参考文献 (21)附图·····························概述.一、机构机械原理课程设计的目的:机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要实践环节。
其基本目的在于:(1)进一步加深学生所学的理论知识,培养学生独立解决有关本课程实际问题的能力。
(2)使学生对于机械运动学和动力学的分析设计有一较完整的概念。
(3)使学生得到拟定运动方案的训练,并具有初步设计选型与组合以及确定传动方案的能力。
(4)通过课程设计,进一步提高学生运算、绘图、表达、运用计算机和查阅技术资料的能力。
二、机械原理课程设计的任务:机械原理课程设计的任务是对机械的主体机构(连杆机构、凸轮机构、齿轮机构以及其他机构)进行设计和运动分析、动态静力分析,并根据给定机器的工作要求,在此基础上设计凸轮、齿轮;或对各机构进行运动分析。
要求学生根据设计任务,绘制必要的图纸,编写说明书。
三、械原理课程设计的方法:机械原理课程设计的方法大致可分为图解法和解析法两种。
图解法几何概念较清晰、直观;解析法精度较高。
根据教学大纲的要求,本设计主要应用图解法进行设计。
[设计名称]牛头刨床一.机构简介:机构简图如下所示:牛头刨床机构简图牛头刨床是一种用于平面切削加工的机床,如上图所示。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构1-2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
因此,刨床采用具有急回特性的导杆机构。
刨刀每切削完成一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
二.设计数据:三. 设计内容:第一节 导杆机构的运动分析㈠导杆机构设计要求概述:已知曲柄每分钟的转数2n ,各构件尺寸,且刨头导路x x-位于导杆端头B 所作圆弧的平分线上。
要求作机构的运动简图,并作机构一个位置的速度、加速度多边形以及刨头的运动线图,画在 2号图纸上。
10位置的机构简图:㈡计算过程:由已知数据n2=60r/min得ω2=2π×60/60(rad/s)= 2πrad/s .1、求C点的速度:⑴确定构件3上A点的速度:构件2与构件3用转动副A相联,所以υA3=υA2。
又υA2=ω2l O2A =0.110×2π=0.22πm/s=0.69m/s.V的速度:⑵求4A选取速度比例尺:μv=0.023(m/s)/mm;υA4 = υA3 + υA4A3方向:⊥BO4 ⊥AO2 ∥BO4大小:?ω2l O2A?用图解法求解如图1:图1式中υA3、υA4表示构件3和构件4上 A 点的绝对速度,υA4A3表示构件4上A 点相对于构件3上A 点的速度,其方向平行于线段BO 4,大小未知;构件4上A 点的速度方向垂直于线段BO 4,大小未知。
在图上任取一点P ,作υA3 的方向线p a3 ,方向垂直于AO 2,指向与ω2的方向一致,长度等于υA3/μv ,(其中μv 为速度比例尺)。
过点p 作直线垂直于⊥BO 4 代表υA4的方向线,再过a 3作直线平行于线段BO 4 代表υA4A3的方向线这两条直线的交点为a 4,则矢量p a 4和a 3a 4分别代υA4和υA4A3 。
由速度多边形43a pa 得:υA4=μv ´ p a 4=μv ´ 20 = 0.483 m/s υA4A3=μv ´ a 3a 4=μv ´ 19 = 0.437 m/s ⑶ 求BO 4的角速度4ω:曲柄位于起点1时位置图如设计指导书图(1):此时42O AO ∠为:o 17.7383.1690380110arcsin 2arcsin242242=-=-=-=∠ππO O AO l l O AO 又由1位置起将曲柄圆周作12等分则当曲柄转到10位置时,如图(1): ∠ο83.1617.7327036042=︒ ︒ ︒=O AOAO O O AO A O O O l l l l l O O A 2424422cos 222242•-+=∠\mml O A 55.2764= 杆BO 4的角速度4ω:4ω=V A4/l BO 4= 0.4830.277rad/s =1.75 rad/s杆BO 4的速度V 4:V 4=4ω× l BO 4=1.75*1.54m/s =0.9431m/s⑷ 求C 点的速度υc :υc = υB + υCB方向: ∥X-X ⊥BO 4 ⊥BC 大小: ? ω4l O 4B ?图2速度图见图2:式中υc 、υB 表示点的绝对速度。
υCB 表示点C 相对点B 的相对速度其方向垂直于构件CB ,大小未知,点C 的速度方向平行于X-X ,大小未知,图上任取一点p 作代表υB 的矢量pb 其方向垂直于BO 4指向于2ω转向相反,长度等于v B V μ/(v μ为速度比例尺)。
过点p 作直线平行于X-X ,代表υc 的方向线,再点b 作直线垂直于BC 代表υCB 的方向线,这两方向线的交点为C 则矢量pc 和bc 便代表 υc 、υCB 。
则C 点的速度为:υc =μv ×pc =μv × 40 = 0.92 m/s υCB =μv ×cb=μv × 5 = 0.115 m/s 2、求C 点的加速度: ⑴ 求a A2:因曲柄匀速转动:故22222222/343.4/)2(110.0s m s m l a a AO n A A =⨯=⋅==πω223/343.4s m a a A A ==选取加速度比例尺:μa =0.15(m/s 2)/mm ⑵ 求a A4:343434A A A A K A A a a a a γ++=3434344A A A A K A A n A a a a a a γτ++=+方向: ⊥BO 4 B →O 4 A →O 2 ⊥BO 4 ∥BO 4 大小: ? 424AO l •ω √ 3442A A V •ω ? 加速度见下图:∏式中44A n A a a 和τ是4A a 的切向和切法向加速度,34A A a γ是点A 4相对于A 3的相对加速度,由于构件3与构件4构成移动副,所以034=A A n a 则3434A A t A A r a a =其方向平行于相对移动方向,即平行于BO 4,大小未知,34A A Ka 为哥氏加速度,它的大小为θωsin 234434A A A A K Va=,其中θ为相对速度34A A V 和牵连角速度4ω矢量之间的夹角,但是对于平面运动,4ω的矢量垂直于运动平面而34A A V 位于运动平面内,故ο90=θ,从而344342A A A A K V a ω=哥氏加速度34A A Ka的方向是将34A A v 沿4ω的转动方向转ο90(即图中'3k a 的方向)。
在上面的矢量方程中只有344A A rA a a 和τ的大小未知,故可用图解法求解。
如右图,从任意极点π连续作矢量'‘4'3aa ππ和代表43A nA a a 和;再过'3a 作''3k a 垂直于线段BO 4 ,大小mm u V w k a a A A 2.10/2'344'3==;然后再过'k 作BO 4的平行线,代表34A A aγ的方向,过'‘4a 作垂直于BO 4,的直线,代表4A na 的方向线,它们相交点'4a 则矢量‘4a ℵ代表4A a 。
4A a =μa ‘4a ℵ=μa * 60.6 = 9.09 2/s m⑶ 求B 点加速度B a : 构件4的角加速度βBO4为:2444/29.3'44s rad l a u l a AO a AO A BO ===ℵ"2244/654.1s m l a BO n B =⊕=⊃244/775.1s m l a BO BO B =⊕="⊗()()222/426.2775.1654.122s m a aa B n BB =+=+=4⊗︒==02.47arctan n BB a a ⊗÷⑷ 求C 点的加速度:C BB c a a a +=n C B C B B n B n c a a a a a a c+++=+τττ方向: \ ∥x-x B →O 4 ⊥BO 4 ⊥CB C →B大小: \ ? Ú l BO 4βBO4 ? 0.090m/s 2加速度图见下图:式中,nCB a 表示点C 相对点B 的法向加速度其方向为从C 指B ;τCB a 表示点C 相对点B的切向加速度,其方向垂直于CB 。
又因速度多边形已作出,所以上式法向加速度可求出(C 点作水平运动,故C 点的法向加速度为0)。
仅有ττCB a a c 和的大小未知,同样可以用图解法求解。
如右图,在图上任取一点π作''b π代表nB a ,方向为平行于BO 4并从B 指向O 4,长度为a BO l μω/424,(其中a μ为加速度比例尺)。
过''b 作'''b b 代表τB a ,方向垂直于BO 4,长度为a BO BO l μβ/44,连接'b π,它表示B a ,再过过'b 作'''c b 代表n CB a ,方向平行CB并从C 指向B ,长度为a cB Bc l V μ/)/(2过''c 作垂直于CB 代表τc B a 的方向线又从π作平行于X-X 的方向线,两线交点为'c ,则矢量'c π便代表ca 。