挖掘机底架工装设计
小型履带式液压挖掘机底盘履带、支重轮、拖链轮的设计(附带CAD图纸)

目录摘要 (3)Abstract (4)第一章引言51.1挖掘机简介51.2小型液压挖掘机的现状与发展趋势7第二章结构参数计算92.1履带链轨节节距t与履带板宽度992.2驱动轮节圆直径Dq2.3导向轮工作面直径D9d2.4拖链轮踏面直径D9t2.5支重轮踏面直径D10z2.6链轨节数n、拖链轮数量10第三章性能参数计算113.1行驶速度V113.2爬坡能力α113.3接地比压p123.4最大牵引力T13第四章履带设计144.1履带介绍144.2履带结构和作用154.3履带装配设计21第五章支重轮设计225.1支重轮简介225.2支重轮数量计算225.3两个支重轮间距离235.4支重轮设计235.5装配完成设计27第六章拖链轮设计296.1拖链轮的工作原理296.2拖链轮的结构296.3拖链轮技术要求296.4拖链轮的组成零件设计30第七章设计小结与体会36参考文献37附录一:英文文献翻译38附录二:英文文献原文42小型履带式液压挖掘机底盘履带、支重轮、拖链轮的设计摘要:挖掘机,又称挖掘机械,是用铲斗挖掘高于或低于承机面的物料,并装入运输车辆或卸至堆料场的土方机械。
本文介绍了小型履带式液压挖掘机履带、支重轮、拖链轮的结构形式及组成,并对其做了结构尺寸设计及履带行走装置性能参数的计算,给出了履带、支重轮、拖链轮装配图和各主要零件的零件图。
关键词:挖掘机履带支重轮拖链轮The design of the s mall caterpillar hydraulic excavator’scrawler ,supporting wheel and drag sprocketAbstract: Excavator ,also calls excavating machinery, is an earthwork machinery to use the bucket mining the materials above or below the bearing machine surface , and to load to the transport vehicles or to discharge to the heap of yard. This paper introduces the crawler ,the supporting wheel and the drag sprocket’s structure form and composition of the small caterpillar hydraulic excavator,and the structure size is done in the design and the performance parameters of caterpillar walk device is calculated,and the assembly drawings ,the main assembly parts graph of the crawler,supporting wheel ,drag sprocket are given.Keyword:excavator crawler supporting wheel drag sprocket第一章引言本次设计的内容是小型履带式液压挖掘机底盘履带、支重轮、拖链轮的设计。
某型50 t级挖掘机下车架优化设计

2018.11 1工 和 辅 【41
设 计 -计 算
Design and Catcutation
图 7 x架 上 x 板 与 回 转 支 承座 连 接 处 开 裂
4 5 6
7
1.下 x板 2.上 X板 3.回 转 支 承 座 4.前 筋 板 板 6.下 圈 7.后 筋 板
图 2 下 车 架开 裂 故 障
2 有限元分析及应力应变贴片试验
2。1 下车 架有 限元 分 析 将 i'-/( 所有 零 部件 进 行三 维 建模 .肝绀 建 部 件模
。 部什 模, 各连 接 处 为尼 问隙 ,』_]_为 种 材 料连 接 , 将 焊 缝 ㈦等 j 材 的机械 性 能 ;采 胴 壳 .元 格 对模 , 进 行 格 划分 l_I,如图 8所 ,J 。
关键 词 :挖掘 机 ;下车架 ;疲劳强度 ;形 变 ;位移 ;可靠性
矿山工况比较恶劣,对挖掘机的要求越来越高 。某型 50 t级挖掘机进入矿山作业后 ,故障频出 ,主要 为结构件 失效 ,下车架开裂 ,无故障工作时问明显降低 ,导致矿 山 开采成本大大增加 。针对这种情况 ,为提高挖掘机的抗疲 劳强度 ,从结构组成 、应力分析及模型优化等方面逐步展 开 某型 50 t级挖 掘 机下 车架 优 化设 计 。
图 5 X 架结 构 示 意 图
5.侧 筋
^●扣 瑚 I¥(EPID'll图 8 网格 划 分
“
\.)
_ ‰ 九 廿●
呵 埘蕈_罩型 m
图 6 X 架 回转 支 承座 开 裂 挖 掘机 的相 应 位置 进行 贴 片试验 。按 照 国家 标准 GB/T 13992- 1992 ̄电阻 应 变 计》和 GB/T 33941.1— 2017《土 方 机 械 结 构 件 应 力测 试方 法 第 1部 分 :通 则 》测 量 ;沿 右侧履带架布置 18个测点 ,包括 7个应变花(x ,X ,X7, X【j,x x X,;),11个 应 变 片 ,共 32个 通道 ;贴 片 位 置 如 图 1 1所 示 。下 车架 优化 前 重点 位置 贴 片试 验数 据 如表 I 所 示
挖掘机左右履带架通用焊接工装的设计
可 。其 中 ,马 达 座 的 紧 固通 过 紧 固 轴 实 现 ,沿 j , 向 的空间尺 寸 由方箱 上 的特 制轴 台阶控 制 ;通 过 自 身重力 和件 5 ( 高度 调 节座 )的共 同 作用 ,实现 马 达座 的定位 。履 带 梁 在 向通 过 自身 重 力 和 件 6 、 件 7来 实现 ,且件 6 、件 7的对称 结 构 可 实现 履 带 梁 的 自由度 控制 与夹 紧 。形 位公差 的对称度 要求 主 要 是控制 方箱 、2个支 承座 中心线 和 平 台 中心 线 的 吻合 度 ,以保证 履 带架在 焊接 后 的尺寸 要求 。 该工 装在使 用 时 ,先将 马达座安 放 到方箱 的定 位槽 上 ,再将履 带梁 置 于支承 座上 。调 整高度 调节 座 ,使 马 达座 达到焊 接 面与平 台面垂 直 ,这时 固定 好方箱 上 的紧 固螺 母 ,使 马达座 定位 锁紧 。履带 梁 在对心 支承 座特 制形 状 和 自身 重力 的共 同作 用 下 ,
方便 于生 产 、提 高工 作 效率 ,又 能保 证 产 品 的 工艺 尺 寸 和 外 形 。 可 以 毫 不 夸 张 地 说 , 在 生 产
过 程 中 ,没 有 工 装 就 没 有 质 量 上 乘 、 性 能 可 靠
的产 品 。
位焊一焊接 ,其特点是各散件单独加工装夹方便 , 使用的设备小,工序成本相对较低 ,但是对定位焊 夹 具精度 和焊 接变 形 的控 制要 求较 高 ;第 二种 方法 是 各零部 件组 对定 位焊一 焊接一 总 成件机 加工 ,特
点是需 大 型机加 工设 备 ,工序成 本较 高 ,但 形位 公 差 和尺寸公 差易 于控 制 。 我们 采 用 第 一 种 方 法 制 造 履 带 架 ,制 造 过 程 中要 严 格 控 制 组 对 工 装 的 精 度 ,并 保 证 组 对 定 位 焊 和 焊 接 过 程 中 履 带 架 的 变 形 量 符 合 技 术 要 求 的 规 定 , 否 则 易 产 生 马 达 座 下 导 块 、 上 导 板 加 工 面 与 基 准 E 的 尺 寸 超 差 ,或 者 造 成 马 达 座 加 工 面 对 基 准 E平 行 度 和 对 基 准 D 垂 直 度 的 超 差 。其 后 果 将 直 接 导 致 挖 掘 机 行 走 过 程 中 驱 动 轮与 轨 链 节 发 生 偏 差 , 即 驱 动 轮 啃 磨 轨 链 , 引起 不 正 常 磨 损 ,影 响 行 走 性 能 ,降 低 驱 动 轮 和轨 链 节 的使 用 寿 命 。
毕业设计--液压挖掘机底盘设计(含图纸)
目录摘要 (IV)Abstract (V)前言 (VI)第一章绪论 ........................................... 错误!未定义书签。
1.1 液压挖掘机在现代化建设中的作用.............. 错误!未定义书签。
1.2 液压挖掘机的工作特点和基本类型 (1)1.2.1 液压挖掘机的主要优缺点 (1)1.2.2 液压挖掘机的基本类型及主要特点 ............ 错误!未定义书签。
1.3 国内外液压挖掘机研究现状及发展趋势 (4)1.3.1 研究现状 (4)1.3.2 发展趋势 .................................. 错误!未定义书签。
1.4 课题设计的目的和意义 (5)1.5 本设计所要完成的主要任务 (5)第二章总体方案设计 .................................... 错误!未定义书签。
2.1 履带式液压挖掘机的组成...................... 错误!未定义书签。
2.2 设计依据 (7)2.2.1 履带式行走装置的主要特点 (7)2.2.2 设计参数 .................................. 错误!未定义书签。
2.3 总体设计原则................................ 错误!未定义书签。
2.4 动力装置的比较与选型 (8)2.5 工作装置的比较与选择 (9)2.5.1 反铲工作装置 .............................. 错误!未定义书签。
2.5.2 正铲工作装置 .............................. 错误!未定义书签。
2.6 回转机构的选择.............................. 错误!未定义书签。
2.7 传动方式的比较与选择........................ 错误!未定义书签。
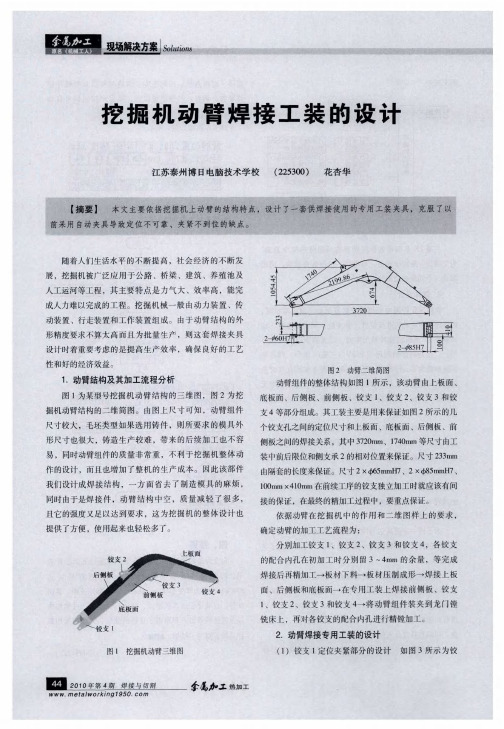
挖掘机动臂焊接工装的设计
此处 采用 了 阶梯 压板 ,即 压板 的 中间部 分 高 出 lmm, 2
以保 证压 板同时压紧前侧 板与上 板面 、底板 面 ,同时在
压板的上下两边增加 了导 向杆 ,以防止压板旋转不正。 ( )铰 支 2定位夹紧部分的设计 图 5为铰 支 2的 3
的螺母。
图 4 动臂工 装
度在加工时要保 证好尺寸 。同时在定位轴 的一 端安装有
锁 紧螺母 ,保证 铰支 2定 位 后被 锁 紧 ,等焊 接 完成 后 , 松开螺母 ,抽出红色心轴 ,拿 出心轴上的隔套。
定
图 3 铰支 l 专用工装设计
( )动臂杆身工装设计 图 4为 动臂焊接工 特将 支架设 计在 前后两 个 侧夹 紧上 ,此时通过隔套 和定位 轴 以限制 工件 的 5个 自 由度 ,铰 支 2绕着轴心线 的旋转 自由度 由铰 支 2的底 面 和上板 面的配 合来 限制 ,铰支 2沿轴 线方 向的位 置,由 图 5中红色 的销轴 上的三个 隔套来控制 ,因此 隔套 的长
图 ,动 臂 以 已经 焊 接 好 的后 侧 板 、上 板 面 和 下 板 面 在 4
图 5 铰支 2 工装设计
铰支 4的定位夹紧原理 与铰 支 l的相 似 ,铰支 3的
个侧支承和 4个支座 的支承下定 位 ,以 4个 侧夹 紧压 紧 前侧板进行夹紧。一般情 况下 ,工件 的定位 最多 是 3个 支承 。此处 由于工件的外形 尺寸偏 大 ,几米 长的板 料在 下料或折弯成 形过程 中或 多或 少都 存在 一些 加 工误差 ,
因此不可能每个成 形料 尺寸完全 一致。为 了保证定 位可
定位夹 紧原理与铰支 2的相似。 3 .结语
实践证 明,该夹具使用 起来 不算很方 便 ,但是 如果 采用 自动定位夹 紧的方式 ,则由于板 料的下 料误差及 成 形误差 ,常常导致夹不 紧 ,定位不 可靠。 因此 这套手 动
某小型液压挖掘机装配工厂设计
房的规划和建 设。新 建车间采用单班工作制度 , 全年工作 日
【 者 简 介】 娟 (92 , , 作 卢 18 ̄)女 重庆永川人 , 工程师 , 从事装配工 艺
设计工作 ,电子信箱 )13 4 @q . m ( 9 59 7 q o 。 c
艺方案及上下车架装配 线的形式 ,进行了新方案和传统方案 的优缺点对比, 详见表 1 。
车 、 空中转运 系统等 , 了物料配送 的无人化、 自 大件 实现 高 动化。
【 b t c ] s l y r l cv trse by l tn ier g ei , e ae t d csh G asm l e nh A sr t n l da ie aa sm l a g e n s nt prnr ue e V e byi e a I a ma u c x h oa p ne n i d g h p i o tR s l ot n
大中型液压挖掘机装配车间工艺平面设计
3 设 置 装 配线 的必 要 性
1 年生 产纲领 较 大 , ) 生产节 拍较 快 , 固定 工位 式 装配 无法满足 生产 节拍要求 。
2 采 用 自动 化 式 流 水 生产 线 , ) 生产 车 间 布局 整
齐 , 料走 向通 畅 , 物 区域 划 分 明确 , 于车 间 的物 料 便 配 送及信 息化管 理 。
社会 采购 或指 定厂 商供 给 。挖掘 机主 机制 造 企业 生 产 主要 包 括上 车 架 ( 台) 下 车架 ( 走架 ) 动 臂 、 转 、 行 、
提 高装 配工 作效 率和 装配 质量 , 少产 品废 品率 , 减 降
低 工人 劳动强度 。
斗杆 、 铲斗等 自制件 下料 、 焊接 、 加工 及 主机装 配 、 机 试验 、 装等 工序 内容 。现就机械工业第一设计研究院 涂 设计的某大、 中型液压挖掘机 主机 装 配车 问为 例 , 绍 介 挖 掘机产 品装配工 艺平面 布置及 设备选 用 。
能的翻 转机上 。预装 完 成后 车架 翻转 成正 面 , 吊往 下
5车 间工艺布置
5 1工艺 布局 .
车 装配 输送 线进 行后 续工序 安装 。 2 履 带 板 在 线 下 单 独 区域 安 装 , 下 车 装 配 的 ) 是 最 后 工序 ,安装 采用 行 车 辅助 或配 置 专 用履 带 板牵
装 配工序 多 , 设三 条 自动 流水装 配生产 线 。 2 生产 组织 : 鉴 国 内、 同行 业挖 掘机 装配作 ) 借 外 业 工艺 布置 原则 ,最 大 限度做 到装 配线 和工位 生产
节拍平 衡 。 3 设备 选 择 : ) 以适用 、 靠 、 进 、 可 先 经济 为 原则 ,
挖掘机工作装置的设计
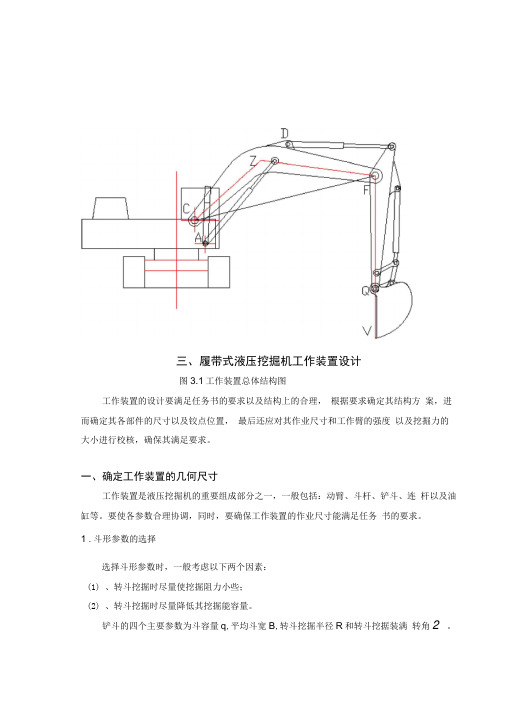
三、履带式液压挖掘机工作装置设计图3.1工作装置总体结构图工作装置的设计要满足任务书的要求以及结构上的合理,根据要求确定其结构方案,进而确定其各部件的尺寸以及铰点位置,最后还应对其作业尺寸和工作臂的强度以及挖掘力的大小进行校核,确保其满足要求。
一、确定工作装置的几何尺寸工作装置是液压挖掘机的重要组成部分之一,一般包括:动臂、斗杆、铲斗、连杆以及油缸等。
要使各参数合理协调,同时,要确保工作装置的作业尺寸能满足任务书的要求。
1 .斗形参数的选择选择斗形参数时,一般考虑以下两个因素:(1)、转斗挖掘时尽量使挖掘阻力小些;(2)、转斗挖掘时尽量降低其挖掘能容量。
铲斗的四个主要参数为斗容量q,平均斗宽B,转斗挖掘半径R和转斗挖据装满转角2。
R B及2与q之间有以下几何关系:q =1R2B(2 -sin 2 )k s当q —定时最大挖掘阻力W1max及转斗挖掘能容量E随着R的增大而下降。
但B 和R 大到一定程度,综合反映到2 <90。
后,W1max和E下降渐缓,且B的增大,使附加载荷引起的对工作装置的扭矩和水平转矩随之增大全面考虑。
可取 2 =90°~100 °,若2>100°则W1max太大;若2 <90°则B或R太大。
在q三0.25m3时R和B对W1max的影响差不多。
从能量的观点看,不论q如何,B 对E的影响远远大于R,设计时应兼顾W J max和E两方面,希望两者都小些,因此R和B两值不宜相差悬殊。
综合考虑,选取:2=98°,B=1.25, k s=1.25依据公式1 2 q R B(2 -sin2 )k s计算确定R=1.33m2 •动臂及油缸铰点的布置15取值对挖掘机性能有影响。
15取值过大将使油缸力臂值增大,回转支承受力变:11及大,闭锁力上升,动臂摆角减小,作业范围减小,且使动臂座尺寸变大,给制造和安装带来不便;11的值取的过大,使特性系数k s值增大,提升能力下降。
小型挖掘机履带架通用焊接工装的设计
量空间,制造及维护也非常繁琐,而且像工装平 方便,使用的设备小,工序成本相对较低,但是
台这样的部件还要重复设计、制造,投入成本高。 对定位焊夹具精度和焊接变形的控制要求较高;
通用工装的设计及应用,可以很好地解决以上问 另一种方法是各零部件组对定位焊→焊接→总成
题,现以我公司开发的 E C 4 0 型挖掘机履带架焊 件机加工,其特点是需大型机加工设备,工序成
形状变得复杂,也就增加了从工装上卸下 的难度。
3 )焊接夹具不同于机床夹具,一般机
图 2 通用工装简图 1- 方箱;2- 紧固轴;3- 紧固螺母;4- 紧固盖板;5- 高度调节座;
6- 对心支撑座Ⅰ;7- 对心支撑座Ⅱ
床夹具主要是用来保证零件的加工精度,而焊接
履带架各定位点、面大多为空间尺寸,加上
夹具主要用来保证焊接结构各连接件的相对位置 测量空间的限制,直接检测比较困难,所以利用
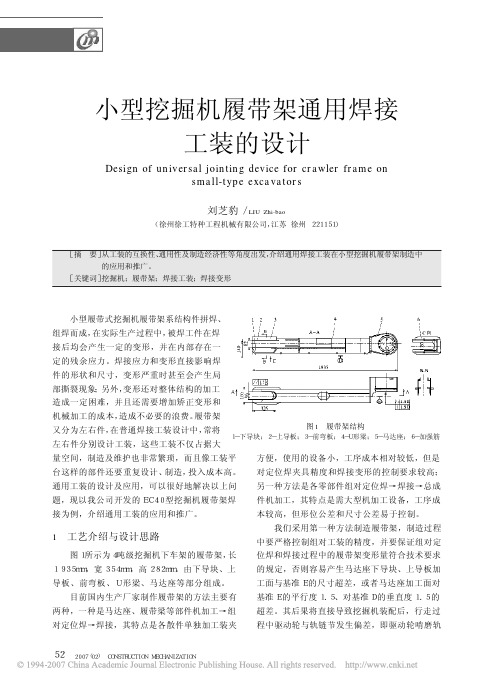
[摘 要]从工装的互换性、通用性及制造经济性等角度出发,介绍通用焊接工装在小型挖掘机履带架制造中 的应用和推广。
[关键词]挖掘机;履带架;焊接工装;焊接变形
小型履带式挖掘机履带架系结构件拼焊、
组焊而成,在实际生产过程中,被焊工件在焊
接后均会产生一定的变形,并在内部存在一
定的残余应力。焊接应力和变形直接影响焊
本套履带架通用焊接工装经过生产实践的检 验,使用方便快捷,降低工装制造成本,便于工
带梁的自由度控制与夹紧。
装维护和管理,并很好地解决了驱动轮与轨链偏
3 工装精度的检测与验证
磨问题。
(编辑 何 明)
由于实际生产制造过程中受到多种因素的影 响,工装投入使用后,第一次加工的产品不一定 符合尺寸要求,需要通过对履带架的检测才能将 工装的最终定位。
底板座架的工艺与工装设计排版
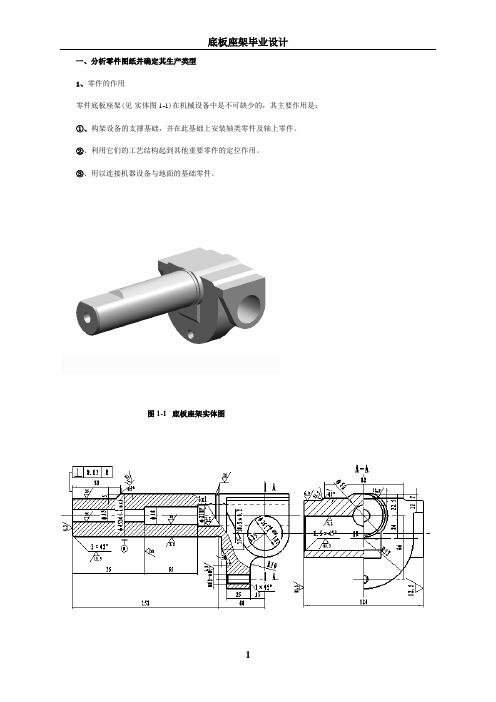
一、分析零件图纸并确定其生产类型1、零件的作用零件底板座架(见实体图1-1)在机械设备中是不可缺少的,其主要作用是:①、构架设备的支撑基础,并在此基础上安装轴类零件及轴上零件。
②、利用它们的工艺结构起到其他重要零件的定位作用。
③、用以连接机器设备与地面的基础零件。
图1-1 底板座架实体图图1-2 底板座架零件图2、零件的工艺分析通过对该零件的重新绘制,知道了得原图的视图正确、完整,尺寸、公差及技术要求齐全。
但是该零件外圆和几个孔的尺寸精度要求比较的高,加工会有些困难的。
该零件是一个不规则零件,它的结构复杂不对称,以轴的中心线为基准,需加工面的表面粗糙度都不难获得。
十字孔的位置度要求虽说并不高,但需要经过一番尺寸链的计算才能获得。
不好加工的就是上端几个台阶平面,各平面是以斜面和圆面连接,加工有些费时。
3、零件的生产类型依据设计题目知:Q=5000台/年,n=1件/台;结合生产实际,备品率α和废品率β分别取为10%和1%。
代入公式N=Qn(1+α)(1+β) (1-1)N=5000×1×(1+10%)×(1+1%)=5555件/年零件是机床上的底板座架,质量为4.11kg,查《机械制造技术基础课程设计指南》表2-1可知其属于轻型零件,生产类型为大批生产。
二、选择毛坯尺寸,设计毛坯图1、选择毛坯该零件材料是HT200。
考虑到该零件为不规则形状,结构比较的复杂,在加工过程中多半是在车床和铣床上,零件可以静止不动,但也有的回转运动,零件承受着交变载荷及冲击载荷,因此选用铸造件,也可以较好的保证零件的形状结构。
而且零件年产量为5555件,属于批量生产,再者零件的轮廓尺寸不大,故可以采用铸造成型。
这从提高生产率、保证加工精度考虑,也是应该的。
2、确定机械加工余量、毛坯尺寸和公差参见《机械制造技术基础课程设计指南》(下称《指南》)第五章第一节,灰铸铁的公差及机械加工余量按GB/T 6414-1999 确定。
厦工XG804履带式小型液压挖掘机底盘部分设计(1)
西南交通大学峨眉校区《机械设计》课程设计论文厦工XG804履带式小型液压挖掘机底盘部分设计院系:机械工程班级:工程机械姓名学号班级工机二班联系电话或Email地址设计题目厦工XG804履带式小型液压挖掘机设计内容本次的设计为履带式液压挖掘机。
液压挖掘工作装置一般由动臂、斗杆、铲斗以及动臂油缸、斗杆油缸、擦干都油缸等组成。
设计的内容为总体设计,主要包括主工作臂的设计和推土铲的设计。
总体设计的优劣决定了其它零部件设计的质量,也决定了整机的性能。
合理的、全面的总体设计是整个设计任务顺利完成的保证。
设计思路此次设计的主工作装置主要采用反铲装置,动臂部分主要采用整体式弯动臂,这样有利于得到较大的挖掘深度。
斗杆部分主要采用整体式直动斗杆;铲斗部分采用道侧齿的铲斗。
底盘行走系采用履带式行走底盘,在设计底盘过程中尽量采用标准件,以便更换方便设计方法液压反铲工作装置一般由动臂、斗杆、铲斗以及动臂油缸、斗杆油缸、擦干都油缸等组成。
其结构所示。
其结构特点是各构件之间均采用铰接连接,并通过改变各液压缸的行程来实现挖掘过程的各种动作。
工作装置的各个销轴采用合金钢制造,经渗碳淬火处理,强度较高。
且各个铰点都设有油杯,用油抢注入润滑脂润滑。
工作装置各铰点处均设有限位块,以减少对油缸的冲击。
斗齿部分由赤座和斗齿组成。
斗齿套在赤座上用弹性销固定,斗齿磨损后可以更换。
进度安排周次完成的主要任务周次完成的主要任务1 分组,确定题目9 各部分建模2 整体思路分析10 设计强度校核3 几何参数的确定11 设计强度的校核4 相关资料的收集12 整体执行机构的配合5 各系统工作状态参数的计算13 检查整体执行机构的合理性6 各系统工作状态参数的确定14 整理设计计算说明书7 各系统强度分析15 整理设计计算说明书,答辩8 各部分建模16 提交厦工XG804履带式小型液压挖掘机厦工XG804履带式小型液压挖掘机实物图液压挖掘机是工程机械的一个重要品种,是一种广泛用于建筑、铁路、公路、水利、采矿等建设工程的土方机械。
挖掘机工作机构的设计
挖掘机工作机构的设计
挖掘机工作机构的设计包括挖掘杆、挖掘桶、铲斗等部件的设计。
这些部件需要根据挖掘机使用的场景、作业要求和土壤情况等
因素来进行设计。
以下是一些设计原则:
1.结构合理:挖掘机工作机构的结构应该合理,设计稳定牢固,使得机器在工作过程中不会出现安全事故。
2.寿命长:挖掘机工作机构需要设计寿命长,尽可能减少机器
的维修和更换配件的频率,提高机器的使用寿命。
3.操作便捷:挖掘机工作机构的设计应该考虑到操作的便捷性,用户可以方便地完成所有操作,提高工作效率。
4.适应性好:挖掘机工作机构需要能够适应不同种类的地质环境,在挖掘岩石、泥土、沙子等不同材料的地质环境下都可以正常
工作。
5.经济环保:挖掘机工作机构需要考虑节约能源和环保,减少
能源消耗和废物排放,减轻环境污染的影响。
挖掘机工作机构的设计需要综合考虑以上因素,以提高机器的
使用效率和安全性,并满足用户的需求。
挖掘机工作装置的简单设计方法
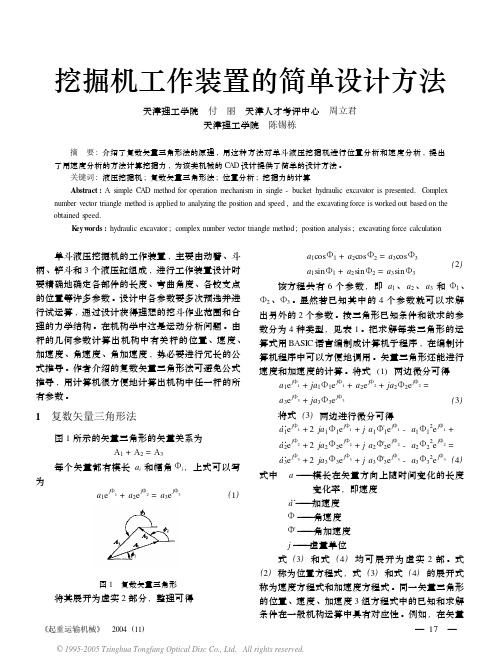
挖掘机工作装置的简单设计方法天津理工学院 付 丽 天津人才考评中心 周立君天津理工学院 陈锡栋 摘 要:介绍了复数矢量三角形法的原理,用这种方法对单斗液压挖掘机进行位置分析和速度分析,提出了用速度分析的方法计算挖掘力,为该类机械的C AD设计提供了简单的设计方法。
关键词:液压挖掘机;复数矢量三角形法;位置分析;挖掘力的计算Abstract:A simple C AD method for operation mechanism in single-bucket hydraulic excavator is presented.C omplex number vector triangle method is applied to analyzing the position and speed,and the excavating force is w orked out based on the obtained speed.K eyw ords:hydraulic excavator;complex number vector triangle method;position analysis;excavating force calculation 单斗液压挖掘机的工作装置,主要由动臂、斗柄、铲斗和3个液压缸组成,进行工作装置设计时要精确地确定各部件的长度、弯曲角度、各铰支点的位置等许多参数。
设计中各参数要多次预选并进行试运算,通过设计获得理想的挖斗作业范围和合理的力学结构。
在机构学中这是运动分析问题。
由杆的几何参数计算出机构中有关杆的位置、速度、加速度、角速度、角加速度,势必要进行冗长的公式推导。
作者介绍的复数矢量三角形法可避免公式推导,用计算机很方便地计算出机构中任一杆的所有参数。
1 复数矢量三角形法图1所示的矢量三角形的矢量关系为A1+A2=A3每个矢量都有模长a i和幅角Φi,上式可以写为a1e jΦ1+a2e jΦ2=a3e jΦ3(1)图1 复数矢量三角形将其展开为虚实2部分,整理可得a1cosΦ1+a2cosΦ2=a3cosΦ3a1sinΦ1+a2sinΦ2=a3sinΦ3(2)该方程共有6个参数,即a1、a2、a3和Φ1、Φ2、Φ3。
某中型液压挖掘机装配车间工艺设计
【作者简介】张烜(1984~),男,湖南株洲人,工程师,从事机械工厂工艺设计与研究。
某中型液压挖掘机装配车间工艺设计Process Design of a Medium-Sized Hydraulic Excavator Assembly Plant烜张,满朝,王烛光,刘伟召,李伟(中机中联工程有限公司,重庆400039)ZHANGXuan,MANChao,WANGZhu-guang,LIUWei-zhao,LIW ei(CMCU Engineering Co.Ltd.,Chongqing 400039,China )【摘要】针对某中型液压挖掘机装配车间的工程设计任务,通过采用诸如RGV 装配线、翻转变位机、多轴电动拧紧机、履带自动装配系统、车架合装程控行车、自动化立体库、AGV 系统、自动拣选系统等先进设备,显著提升生产率,缩短生产周期,实现了挖掘机装配过程的自动化和物料配送过程的无人化。
【Abstract 】For the engineering design task of a medium-sized hydraulic excavator assembly workshop,by using advanced equipment ,such as RGV assembly line,flip positioner,multi-axis electric tightening machine,automatic crawler assembly system,frame assembly program-controlled driving,automated three-dimensional library,AGV system,automatic picking system etc.,significantly improve productivity and shorten production cycle.The automation of the assembly process of the excavator and the unmanned material distribution processarerealized.【关键词】中型液压挖掘机;装配车间;工艺设计;自动化【Keywords 】medium-sized hydraulicexcavator;assemblyplant;process design;automation 【中图分类号】TU621【文献标志码】A【文章编号】1007-9467(2022)06-0155-03【DOI 】10.13616/ki.gcjsysj.2022.06.0441引言挖掘机是工程机械行业的主导产品,被誉为“工程机械之王”,其具有动作灵活、多功能和高效率等特点,并且极受用户的欢迎[1]。
履带式挖土机动臂和斗杆制作使用工装模具方案

履带式挖土机动臂和斗杆制作使用工装模具方案
制作履带式挖土机动臂和斗杆的工装模具,你可以按照以下步骤进行:
1. 确定设计需求:根据挖土机动臂和斗杆的尺寸和形状,确定工装模具的设计参数,包括长度、宽度、高度、重量等。
2. 设计模具结构:根据设计需求,设计出工装模具的结构,包括模具的底座、支撑架、固定装置等,以确保模具能够牢固地固定住动臂和斗杆,并能够承受施加在上面的压力和重量。
3. 选择材料:根据模具的设计需求和使用环境,选择合适的材料制作模具,常用的材料有钢材和铝材,具有足够的强度和耐用性。
4. 加工制造:根据设计图纸,使用加工设备和工具进行模具的加工制造,包括切割、钻孔、铣削、焊接等工艺,确保模具的精度和质量。
5. 安装和调试:将制造好的模具安装到挖土机上,根据实际情况进行调整和调试,确保模具与动臂和斗杆的连接稳固,操作灵活。
6. 使用和维护:在使用过程中,按照操作规程正确使用模具,定期检查和维护模具,确保其寿命和性能。
以上是履带式挖土机动臂和斗杆制作使用工装模具的一般方案,具体的制作步骤和方法还需要根据实际情况进行调整和改进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
挖掘机底架装配工装设计说明书
设计摘要:
本次设计为CN220E挖掘机底架本体辊轮装配工装设计;采用门式升降+桥式翻转结构实现工件的升降、翻转工况,减轻工人劳动强度,改善工人操作条件。
门式升降机包括顶部横梁、两矩形刚性支腿、升降小车,绞车及滑轮组以实现升降功能。
为保证翻转梁与工件上升下降过程中不至于越位出现故障,立柱上安装限位行程开关。
两门式起重机与翻转梁连接形成桥式结构通过电机减速机直联以实现工件的翻转。
设计参数
工件重量:G=2575kg(未含辊轮重量)
旋转重量:Gx=4992kg
起重重量:Gq=5964kg
单根钢丝绳承受重量:1511kg
钢丝绳型号:Ø17.5mm6×37+FC GB8918
旋转梁转速:3r/min
起升速度:7-8m/min
门式起重机立柱总高:3.5m
桥式结构跨度:5.2m
旋转梁有效长度:5m
定滑轮个数:4个
定滑轮直径:250mm
动滑轮个数:2个
动滑轮直径:250mm
升降小车行程:1350mm
工作级别A6
绞车电机功率:P j= 2.75kw(2台)
旋转梁配用H型减速机电机功率:P d=7.5kw(1台)。