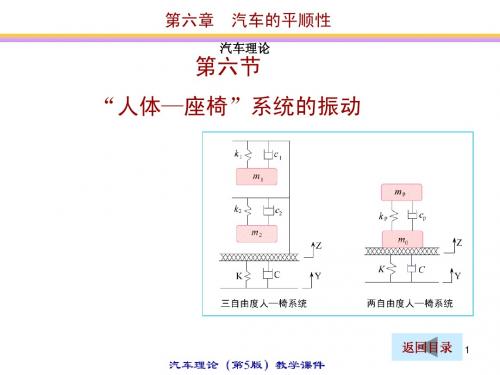
6.6 人体—座椅系统的振动
面向静态体压分布和垂向振动响应的坐姿人体模型建模
摘要近些年,座椅舒适性得到越来越多的关注,成为汽车设计的一项关键指标。
通过建立人-椅系统模型采用仿真方法对座椅舒适性进行研究,能够节约时间、降低成本。
静态体压分布和垂向振动响应作为座椅舒适性的关键评价指标,建立合理的人体生物力学模型进行静态体压分布和垂向振动响应预测,是仿真进行座椅舒适性研究的基础。
本文面向座椅静态和动态舒适性,建立了坐姿人体静态体压和坐姿人体垂向振动模型,并提出一种定制坐垫接触面体压映射设计方法。
基于美国50百分位碰撞假人模型,对模型几何、材料和关节运动副进行修改,建立了姿势可调的中国95百分位坐姿人体静态体压模型,并结合前人实验研究成果对模型的质量分布进行了验证。
通过单轴压缩实验得到泡沫材料特性曲线,根据硬木板和泡沫坐垫座椅实物,建立了座椅模型。
进行硬木板和泡沫坐垫座椅下的体压分布测试,结合实验结果对人-椅模型的准确性进行了验证。
通过人-椅模型仿真,研究了椅面高度、坐垫倾角和靠背倾角对体压分布和软组织应力的影响。
在坐姿人体静态体压模型基础上,采用线弹性材料模拟人体臀部软组织材料,对关节转动副施加刚度和阻尼,得到了坐姿人体垂向振动模型。
分析了坐姿人体垂向振动模型的模态,得到10 Hz以内的三阶主要模态(第一阶1.39 Hz,第二阶4.14 Hz,第三阶4.60 Hz)。
在硬木板坐垫无靠背支撑条件下,进行人体的垂向振动仿真,垂向动态等效质量、水平动态等效质量、座椅-头部传递函数和动态体压分布仿真结果均能与前人实验研究成果很好的吻合,坐姿人体垂向振动模型的准确性得到验证。
通过人体模型垂向振动仿真,分析了人体模型参数对垂向动态等效质量、水平动态等效质量和座椅-头部传递函数函的影响。
提出一种结合静态体压仿真结果的定制坐垫接触面体压映射设计方法(Simulated Pressure and Deformation Mapping method,SPDM方法)。
SPDM方法能够根据人体参数、坐垫材料曲线和压力数据进行接触面定制化设计。
汽车人椅系统的低频多向振动试验与参数识别

汽车人椅系统的低频多向振动试验与参数识别舒红宇;陈仙宝;梅晓磊;罗霜【摘要】人-车的相互作用对汽车的操纵稳定性有重大的影响,而人椅系统的低频多向振动特性的研究对于人-车相互作用的分析具有重要的意义.为此本文中建立了人椅系统的12自由度三维动力学模型,并利用多向振动试验台架在0.5 ~ 5Hz频率范围内进行了人-椅多向振动试验,识别出36个低频多向振动特性参数.结果表明:提出的低频多向振动试验及参数识别方法可行,其参数可表征汽车人椅系统的低频多向振动特性.【期刊名称】《汽车工程》【年(卷),期】2016(038)009【总页数】7页(P1126-1131,1139)【关键词】人椅系统;低频多向振动;参数识别;动力学模型【作者】舒红宇;陈仙宝;梅晓磊;罗霜【作者单位】重庆大学汽车工程学院,重庆400044;重庆大学,机械传动国家重点实验室,重庆400044;重庆大学汽车工程学院,重庆400044;国家摩托车质量监督检验中心,西安710032;重庆大学汽车工程学院,重庆400044【正文语种】中文节能环保使汽车微型化成为重要的发展方向,但随着微型化的发展,当其质量和尺寸更加接近于人体后,人-车的相互作用及其动力学行为耦合将显现出来,并对汽车的操纵稳定性产生不可忽略的影响。
人-车的相互作用比较复杂,通过人体与座椅坐垫和靠背、手与转向盘、脚与底板等连接界面来实现,其中最主要还是通过人体和座椅组成的系统。
因此,人椅系统作为人-车的主要作用界面,其多向振动特性的研究将是人-车相互作用分析的突破点。
目前对人椅系统的三维多向振动特性的研究还很少。
文献[1]和文献[2]中首次考虑了人体上下体间的连接和平面转动,将人体在X-Z平面简化为3个刚体;文献[3]和文献[4]中利用人体动力学表观质量模型考察了人体多向振动,但没有研究上下体的连接和转动特性。
本文中针对汽车操稳性建立了包括平动和转动的人椅系统多向振动模型,综合考虑人体运动和汽车操稳性涉及的频率特征[5-8],选定在0.5~5Hz频率范围内进行了人-椅多向振动试验,识别出36个低频多向振动特性参数,首次对人椅系统的低频多向振动特性进行了探讨。
汽车行驶平顺性
上、下限频率与中心频率的关系为:
f f
u l
1.12 0.89
fc fc
一、汽车行驶平顺性的评价指标
1/3倍频法认为:同时有许多个1/3倍频带都有能量作用于人体 时,各个频带振动作用无明显联系,对人体产生的影响主要是 人体感觉振动强度最大的那个1/3倍频带所造成的。
将振动传至人体加速度的功率谱密度Gp(f)所对应的1/3倍频带中心频 率fci在带宽Δfi区间积分,得到各个1/3倍频带的加速度均方根值分量σpi
车轮动载荷。 评价指标:人体对振动的响应、行驶安全性。
研究平顺性的主要目的:控制汽车振动系 统的动态特性,使振动系统的“输出”在 给定工况的“输入”下不超过一定界限, 以保持乘员的舒适性 。
平顺性分析——建立在随机振动理论的基 础上。
一、随机振动基础和路面输入(补充)
1. 随机振动基本概念
ISO2631用加速度均方根值(σrms)表示人体在1~80Hz范围内的三个感觉 界限,即:
①“舒适—降低界限TCD”——人体感觉良好,可以顺利完成吃、写、读 等动作;
②“疲劳—工效降低界限TFD”——驾驶员能够保持正常进行驾驶; ③“暴露极限”——人体可以承受振动量的上限。
“舒适—降低界限TCD”为“疲劳—工效降低界限TFD”的1/3.15;“暴露 极限”为“疲劳—工效降低界限TFD”的2倍。
人体对加速度敏感度的加权系数
倍频带的中心频率 (Hz)
加权系数 w(fci)
垂直振动
水平振动
1.0
0.5
1.0
2.0
0.71
1.0
4.0
1.0
0.5
8.0
1.0
0.25
汽车座椅体感振动器标准参数

汽车座椅体感振动器标准参数
1. 功率要求:根据振动需求选择适当的功率。
典型的功率范围为100W到500W。
2. 频率范围:振动器的频率范围应覆盖汽车座椅所需的振动频率。
一般而言,频率范围应在20Hz到200Hz之间。
3. 控制方式:可选的控制方式有手动控制和自动控制两种。
手动控制允许用户根据需求调整振动强度和频率,而自动控制可以根据预设的模式或音乐节奏进行振动。
4. 振动模式:振动器可以提供不同的振动模式,包括持续振动、脉冲振动和律动振动等。
振动模式可根据用户需求进行选择。
5. 振幅控制:振动器应提供具有可调节振幅的功能,以适应不同用户的需求。
振幅范围一般为0到10。
6. 安装方式:振动器可采用座椅内部安装或外部安装方式。
座椅内部安装可以使振动效果更加直接和均匀,而外部安装则便于更换和维修。
7. 材料要求:振动器的外壳材料应具有良好的耐用性和防震性能,以承受长时间的振动操作。
内部部件应选用优质的金属和电子元件,以确保稳定和可靠的性能。
8. 安全指示:振动器应具备安全指示灯或声音警告器,以提醒用户在使用过程中的注意事项和警示。
9. 耐久性测试:振动器应符合相应的耐久性测试标准,如振动强度测试、振动频率变化测试以及振动器部件耐久性测试等。
10. 电源要求:振动器应支持汽车电源供电,并具备相应的电源适配器,以确保正常的工作和安全使用。
以上是一份汽车座椅体感振动器的标准参数,供参考使用。
具体参数和要求应根据实际产品需求进行确定。
电动振动按摩椅工作原理

电动振动按摩椅工作原理近年来,随着人们对健康生活的日益重视,电动振动按摩椅逐渐受到了广大消费者的欢迎。
作为一种能够提供舒适按摩的设备,电动振动按摩椅的工作原理显得尤为重要。
本文将详细介绍电动振动按摩椅的工作原理及其作用机制。
一、振动按摩技术介绍振动按摩技术是电动振动按摩椅得以实现的关键。
它通过产生一定频率和振幅的振动力,刺激人体的肌肉组织,从而达到舒缓肌肉疲劳、促进血液循环、缓解肌肉酸痛等效果。
振动按摩技术可分为以下几个方面:1. 机械振动:通过电机传动均匀的机械力,从而实现整个按摩椅的振动。
这种振动方式多数采用电机带动偏心轮等机械结构的运转,从而产生振动力。
2. 落差振动:利用重力的作用,通过附加重物等方法使按摩椅的座椅或背部架构产生微小的位移,从而实现振动按摩效果。
3. 空气振动:通过压缩空气或气泡,在按摩椅内部产生气流或气泡振动,从而刺激人体肌肉,达到按摩效果。
二、电动振动按摩椅的工作原理电动振动按摩椅主要由控制器、振动机构、座椅和按摩程序等组成。
下面将详细介绍其工作原理:1. 控制器:电动振动按摩椅的控制器是整个设备的核心。
控制器通过内置的芯片和程序来控制振动按摩椅的各项功能。
用户可以通过控制器来选择按摩程序、调节振动力度、设置按摩时间等。
2. 振动机构:振动机构是电动振动按摩椅产生振动的关键部分。
通常包括电机、偏心轮和传动装置等。
电机是振动按摩椅的动力源,通过电能转化为机械能,驱动偏心轮旋转。
偏心轮旋转时会产生离心力,从而引起整个按摩椅的振动。
3. 座椅:座椅是人体与电动振动按摩椅之间的接触部分。
座椅内部装有振动装置,通过振动机构的作用,将振动力传递给人体。
座椅通常采用舒适的材质和人体工学设计,以提供更好的按摩体验。
4. 按摩程序:电动振动按摩椅通常设有多种按摩程序供用户选择。
按摩程序会设定不同的振动频率、振动方式和振动力度,以满足不同用户的需求。
用户可以根据个人喜好和身体状况选择不同的按摩程序。
椅子自然晃动的原理是

椅子自然晃动的原理是椅子自然晃动的原理主要是由于力学、重心平衡以及材料弹性等因素共同作用所产生的结果。
首先,椅子的晃动与力学定律有关。
根据牛顿第一定律,物体将会保持静止或匀速直线运动,除非有一个力使其改变状态。
当我们坐在椅子上时,我们的重力将会作用在椅子上。
如果我们坐稳了并且重力不再改变,椅子将会保持静止。
然而,当我们的身体稍微改变位置或者进行微小动作时,我们的重心位置也会随之改变,引起一个微小的失衡。
其次,椅子的晃动还与重心平衡有关。
重心是一个与物体的稳定性密切相关的概念,它是指物体所受重力的质心位置。
当我们在椅子上坐下时,我们的重心通常会略微偏离椅子的底部。
因为椅子的底部是稳定的支撑点,任何使重心偏离底部的动作都会导致椅子晃动。
如果我们的重心偏离得越远,晃动就会越明显。
此外,椅子的材料弹性也会对晃动产生影响。
椅子通常由木材、塑料或金属等材料构成。
这些材料都具有一定的弹性,即能够在受到外力作用后产生一定的形变,然后恢复到原始状态。
当我们坐在椅子上时,椅子会受到我们身体的作用力。
短时间内,椅子的材料会发生微小的弹性变形。
然而,材料弹性的存在使得椅子能够抵抗外部作用力并恢复到原来的稳定状态。
这种微小的弹性变形和恢复在很大程度上导致了椅子的晃动。
总结起来,椅子自然晃动的原理涉及力学、重心平衡以及材料弹性等多个方面的因素。
通过稳定性的破坏和恢复过程,椅子在我们坐下并进行轻微动作时产生晃动。
这种晃动可以看作是一种力学的平衡与失衡的相互斗争,也是椅子材料弹性的一种体现。
最终,这种自然晃动使得我们的坐姿更加舒适,并提供了一定的运动感。
电动振动按摩椅工作原理

电动振动按摩椅工作原理近年来,人们对保健和放松的需求逐渐增加。
电动振动按摩椅作为一种常见的健康产品,被越来越多的人所接受和喜爱。
本文将介绍电动振动按摩椅的工作原理和其对人体的益处。
一、电动振动按摩椅的组成结构电动振动按摩椅主要由座椅、底座、振动马达、控制器等组成。
座椅部分一般采用柔软舒适的材质,以提供良好的坐感。
底座则支撑整个按摩椅的结构。
振动马达是实现按摩功能的核心组件,它通过振动产生按摩效果。
控制器则用于调节按摩的方式、强度、时间等参数。
二、电动振动按摩椅的工作原理电动振动按摩椅利用振动马达产生机械振动,通过振动传导到身体,从而达到放松肌肉、缓解疲劳、促进血液循环的效果。
其工作原理如下:1. 振动马达产生振动力:电动振动按摩椅内部的振动马达通过电能转化为机械能,产生振动力。
振动马达通过不断摆动,使按摩椅产生周期性的振动。
2. 振动传导到身体:振动力传导到人体,通过座椅和人体的接触面,将振动力传递到肌肉和骨骼。
3. 机械振动作用:机械振动作用于人体的肌肉和骨骼,在整个身体范围内实现按摩功能。
不同的振动频率和强度可以达到不同的按摩效果。
4. 促进血液循环:振动按摩可以刺激血液循环,增加血流量。
通过振动按摩椅的作用,可以改善局部肌肉的血液供应,促进新陈代谢的进行,有助于缓解肌肉酸痛和疲劳。
5. 放松肌肉和缓解压力:振动按摩椅的振动力有助于放松肌肉和缓解压力。
持续的按摩可以使身体得到舒缓,释放紧张和压力,提高心理和身体的舒适感。
三、电动振动按摩椅的益处电动振动按摩椅具有以下益处:1. 缓解疲劳:通过按摩椅提供的振动按摩,可以舒缓疲劳的肌肉,恢复体力和精神状态。
2. 改善血液循环:振动按摩椅可以增加血液流动,改善血液循环,促进新陈代谢的进行。
3. 放松身心:振动按摩椅的按摩作用有助于放松身心,缓解压力和焦虑,提高睡眠质量。
4. 缓解肌肉疼痛:振动按摩椅可以舒缓肌肉酸痛,缓解肌肉疼痛和僵硬感。
5. 提高免疫力:振动按摩椅可以刺激淋巴流动,增强免疫力,有助于身体的健康维护。
坐姿人体垂向振动特性及其三自由度模型参数

本文 的研 究显 示 , 量 归 一 化 平均 更 能 剔 除个 体 差 质 异. 另一方 面 , 视在 质量 在零频 处 的数值 正是无 振动
பைடு நூலகம்
时座椅承担的人体重量. 以该值或某频率f( l接近零 值) 处的视在质量 为参照 , J可定义归一化视在质 量 A 考虑到所用 电液激振 台的下截止频率 , M. 本
a d s lra eu d rv r u x i t nlv l. I wa h wnta eo a c rq e ce xs wi h e ia i n i a g n e a o se ct i es t ss o h t r sn n efe u n ise it t tev r c l — mi i ao e 2 h t v
b a in r s o s s o h e td Ch n s ma o y Ac o d n o t e e ct t n l v l ,t e t r q e ce a y r to e p n e ft e s a e i e e hu n b d . c r i g t h x i i e e s h wo fe u n is v r ao wih n 4. t i 31~5. r9. 4~ 1 1 Hz.r s e tv l .Thee tb ih d b o y a c mo e a c u aey d s rb 57 Hz o 3 2. e p c ie y sa ls e id n mi d lc n a c r t l e c e i t e v ria i r to h r ce itc ft e s ae u n b d . h e tc lv b a in c a a trsi so h e t d h ma o y Ke ywo d s a e uma d r s: e td h n bo y;v ria i r t n;a p r n s e c lv b a i t o p a e tma s;b o y mi d l i d na c mo e
人与桌椅的交互性原理

人与桌椅的交互性原理人与桌椅的交互性原理是指在人坐在椅子上使用桌子时,人体与椅子、桌子之间的相互作用和影响的原理。
这种交互性原理涉及人体工程学、力学、力学等多个方面的知识,通过科学的分析和研究,可以为人们提供更加舒适、安全和高效的工作、学习和休息环境。
首先,人与椅子的交互性原理主要包括以下几个方面:身体姿势和人体工程学:人体在坐姿时应该保持一个正确的姿势。
椅子的设计和支撑系统应该符合人体的生理曲线,能够提供足够的空间和支撑,确保身体各部分都得到适当的支持,减轻腰椎和颈椎的压力。
此外,椅子的高度和倾斜角度应该是可调节的,以适应不同个体和不同任务需求。
肌肉和骨骼的力学:人体在坐姿时需要依靠肌肉和骨骼来维持身体的稳定。
椅子需要提供足够的支撑和负荷分布,以减少肌肉疲劳和不适。
椅子的座椅和靠背表面应该是平坦、光滑和柔软的,以避免对肌肉和骨骼的过度压力和损伤。
血液循环和压力分布:良好的椅子设计应该能够促进血液循环,并能够减少对臀部和大腿后部的压力。
特别是在长时间坐姿时,应该避免血液在下肢的积聚,以减少深静脉血栓的风险。
椅子靠背的高度和角度应该是可调节的,以适应不同人的体形和需求。
人与桌子的交互性原理主要包括以下几个方面:桌面高度和倾斜角度:桌子的高度和倾斜角度应该是可调节的,以适应不同人的身高和任务需求。
过低或过高的桌面都会对人的工作产生不利影响,容易导致肌肉疲劳或姿势不正确。
桌面倾斜角度的调整可以减少颈椎和视力疲劳。
工作空间和布局:桌面的大小和布局应该能够容纳人的工作所需的物品和设备,如电脑显示器、键盘、鼠标等。
合理的工作空间布局可以减少手臂和肩膀的不必要运动,提高工作效率。
桌子的边缘设计应该是柔和和圆滑的,以避免对手腕和前臂的不适。
稳定性和承重能力:桌子的稳定性和承重能力是保证工作安全的重要因素。
桌子的结构应该稳固,能够承受人体对桌面的压力和摆放物品的重量。
合适的桌子高度和合理的支撑设计可以减少对人体不必要的运动和劳累。
人体座椅模型的振动评价
一、建模理论:根据随机过程理论,某一时域信号的方均根值等于其功率谱密度函数在整个频率范围内积分的开方值。
因此,加权加速得方均根值aw可由频域积分法求得。
具体计算方法是:先对加速度时间历程a(t)进行频谱分析,得到功率谱密度函数Ga (f);再根据公式:()()180220.5[]w aa f G f dfω=⎰可计算出频率加权后的加速度均方根值aw。
二、计算结果及评价分析:aw2 =0.3665aw1 =0.3728aw1 =0.3922三种计算结果所得加权加速度均方根值均在0.315~0.63(m·s^-2)范围内,故人体主观感觉属于有一些不舒适。
MATLAB程序:clear all% 导入数据Time_Series=xlsread('testdata.xls','A3:A16384');SitX=xlsread('testdata.xls','B3:B16384');SitY=xlsread('testdata.xls','C3:C16384');SitZ=xlsread('testdata.xls','D3:D16384');KaoBeiX=xlsread('testdata.xls','E3:E16384');KaoBeiY=xlsread('testdata.xls','F3:F16384');KaoBeiZ=xlsread('testdata.xls','G3:G16384');DiBanX=xlsread('testdata.xls','H3:H16384');DiBanY=xlsread('testdata.xls','I3:I16384');DiBanZ=xlsread('testdata.xls','J3:J16384');Fs=1/0.002;%利用三种算法计算加权加速度均方根值nfft=length(SitX);window=boxcar(length(SitX)); %矩形窗window1=hamming(length(SitX)); %海明窗window2=blackman(length(SitX)); %blackman窗noverlap=20; %数据无重叠range='half'; %频率间隔为[0 Fs/2],只计算一半的频率[Pxx_SitX,f]=pwelch(SitX,window,noverlap,nfft,Fs,range); [Pxx1_SitX,f]=pwelch(SitX,window1,noverlap,nfft,Fs,range); [Pxx2_SitX,f]=pwelch(SitX,window2,noverlap,nfft,Fs,range); w_SitX=wd(f);aw_SitX=my_inter(Pxx_SitX,w_SitX);aw_SitX1=my_inter(Pxx1_SitX,w_SitX);aw_SitX2=my_inter(Pxx2_SitX,w_SitX);nfft=length(SitY);window=boxcar(length(SitY)); %矩形窗window1=hamming(length(SitY)); %海明窗window2=blackman(length(SitY)); %blackman窗noverlap=20; %数据无重叠range='half'; %频率间隔为[0 Fs/2],只计算一半的频率[Pxx_SitY,f]=pwelch(SitY,window,noverlap,nfft,Fs,range); [Pxx1_SitY,f]=pwelch(SitY,window1,noverlap,nfft,Fs,range); [Pxx2_SitY,f]=pwelch(SitY,window2,noverlap,nfft,Fs,range); w_SitY=wd(f);aw_SitY=my_inter(Pxx_SitY,w_SitY);aw_SitY1=my_inter(Pxx1_SitY,w_SitY);aw_SitY2=my_inter(Pxx2_SitY,w_SitY);nfft=length(SitZ);window=boxcar(length(SitZ)); %矩形窗window1=hamming(length(SitZ)); %海明窗window2=blackman(length(SitZ)); %blackman窗noverlap=20; %数据无重叠range='half'; %频率间隔为[0 Fs/2],只计算一半的频率[Pxx_SitZ,f]=pwelch(SitZ,window,noverlap,nfft,Fs,range); [Pxx1_SitZ,f]=pwelch(SitZ,window1,noverlap,nfft,Fs,range); [Pxx2_SitZ,f]=pwelch(SitZ,window2,noverlap,nfft,Fs,range); w_SitZ=wk(f);aw_SitZ=my_inter(Pxx_SitZ,w_SitZ);aw_SitZ1=my_inter(Pxx1_SitZ,w_SitZ);aw_SitZ2=my_inter(Pxx2_SitZ,w_SitZ);nfft=length(KaoBeiX);window=boxcar(length(KaoBeiX)); %矩形窗window1=hamming(length(KaoBeiX)); %海明窗window2=blackman(length(KaoBeiX)); %blackman窗noverlap=20; %数据无重叠range='half'; %频率间隔为[0 Fs/2],只计算一半的频率[Pxx_KaoBeiX,f]=pwelch(KaoBeiX,window,noverlap,nfft,Fs,range); [Pxx1_KaoBeiX,f]=pwelch(KaoBeiX,window1,noverlap,nfft,Fs,range); [Pxx2_KaoBeiX,f]=pwelch(KaoBeiX,window2,noverlap,nfft,Fs,range); w_KaoBeiX=wc(f);aw_KaoBeiX=my_inter(Pxx_KaoBeiX,w_KaoBeiX);aw_KaoBeiX1=my_inter(Pxx1_KaoBeiX,w_KaoBeiX);aw_KaoBeiX2=my_inter(Pxx2_KaoBeiX,w_KaoBeiX);nfft=length(KaoBeiY);window=boxcar(length(KaoBeiY)); %矩形窗window1=hamming(length(KaoBeiY)); %海明窗window2=blackman(length(KaoBeiY)); %blackman窗noverlap=20; %数据无重叠range='half'; %频率间隔为[0 Fs/2],只计算一半的频率[Pxx_KaoBeiY,f]=pwelch(KaoBeiY,window,noverlap,nfft,Fs,range); [Pxx1_KaoBeiY,f]=pwelch(KaoBeiY,window1,noverlap,nfft,Fs,range); [Pxx2_KaoBeiY,f]=pwelch(KaoBeiY,window2,noverlap,nfft,Fs,range); w_KaoBeiY=wd(f);aw_KaoBeiY=my_inter(Pxx_KaoBeiY,w_KaoBeiY);aw_KaoBeiY1=my_inter(Pxx1_KaoBeiY,w_KaoBeiY);aw_KaoBeiY2=my_inter(Pxx2_KaoBeiY,w_KaoBeiY);nfft=length(KaoBeiZ);window=boxcar(length(KaoBeiZ)); %矩形窗window1=hamming(length(KaoBeiZ)); %海明窗window2=blackman(length(KaoBeiZ)); %blackman窗noverlap=20; %数据无重叠range='half'; %频率间隔为[0 Fs/2],只计算一半的频率[Pxx_KaoBeiZ,f]=pwelch(KaoBeiZ,window,noverlap,nfft,Fs,range); [Pxx1_KaoBeiZ,f]=pwelch(KaoBeiZ,window1,noverlap,nfft,Fs,range); [Pxx2_KaoBeiZ,f]=pwelch(KaoBeiZ,window2,noverlap,nfft,Fs,range); w_KaoBeiZ=wd(f);aw_KaoBeiZ=my_inter(Pxx_KaoBeiZ,w_KaoBeiZ);aw_KaoBeiZ1=my_inter(Pxx1_KaoBeiZ,w_KaoBeiZ);aw_KaoBeiZ2=my_inter(Pxx2_KaoBeiZ,w_KaoBeiZ);nfft=length(DiBanY);window=boxcar(length(DiBanY)); %矩形窗window1=hamming(length(DiBanY)); %海明窗window2=blackman(length(DiBanY)); %blackman窗noverlap=20; %数据无重叠range='half'; %频率间隔为[0 Fs/2],只计算一半的频率[Pxx_DiBanY,f]=pwelch(DiBanY,window,noverlap,nfft,Fs,range); [Pxx1_DiBanY,f]=pwelch(DiBanY,window1,noverlap,nfft,Fs,range); [Pxx2_DiBanY,f]=pwelch(DiBanY,window2,noverlap,nfft,Fs,range);w_DiBanY=wk(f);aw_DiBanY=my_inter(Pxx_DiBanY,w_DiBanY);aw_DiBanY1=my_inter(Pxx1_DiBanY,w_DiBanY);aw_DiBanY2=my_inter(Pxx2_DiBanY,w_DiBanY);nfft=length(DiBanX);window=boxcar(length(DiBanX)); %矩形窗window1=hamming(length(DiBanX)); %海明窗window2=blackman(length(DiBanX)); %blackman窗noverlap=20; %数据无重叠range='half'; %频率间隔为[0 Fs/2],只计算一半的频率[Pxx_DiBanX,f]=pwelch(DiBanX,window,noverlap,nfft,Fs,range); [Pxx1_DiBanX,f]=pwelch(DiBanX,window1,noverlap,nfft,Fs,range); [Pxx2_DiBanX,f]=pwelch(DiBanX,window2,noverlap,nfft,Fs,range); w_DiBanX=wk(f);aw_DiBanX=my_inter(Pxx_DiBanX,w_DiBanX);aw_DiBanX1=my_inter(Pxx1_DiBanX,w_DiBanX);aw_DiBanX2=my_inter(Pxx2_DiBanX,w_DiBanX);nfft=length(DiBanY);window=boxcar(length(DiBanY)); %矩形窗window1=hamming(length(DiBanY)); %海明窗window2=blackman(length(DiBanY)); %blackman窗noverlap=20; %数据无重叠range='half'; %频率间隔为[0 Fs/2],只计算一半的频率[Pxx_DiBanY,f]=pwelch(DiBanY,window,noverlap,nfft,Fs,range); [Pxx1_DiBanY,f]=pwelch(DiBanY,window1,noverlap,nfft,Fs,range); [Pxx2_DiBanY,f]=pwelch(DiBanY,window2,noverlap,nfft,Fs,range); w_DiBanY=wk(f);aw_DiBanY=my_inter(Pxx_DiBanY,w_DiBanY);aw_DiBanY1=my_inter(Pxx1_DiBanY,w_DiBanY);aw_DiBanY2=my_inter(Pxx2_DiBanY,w_DiBanY);nfft=length(DiBanZ);window=boxcar(length(DiBanZ)); %矩形窗window1=hamming(length(DiBanZ)); %海明窗window2=blackman(length(DiBanZ)); %blackman窗noverlap=20; %数据无重叠range='half'; %频率间隔为[0 Fs/2],只计算一半的频率[Pxx_DiBanZ,f]=pwelch(DiBanZ,window,noverlap,nfft,Fs,range); [Pxx1_DiBanZ,f]=pwelch(DiBanZ,window1,noverlap,nfft,Fs,range); [Pxx2_DiBanZ,f]=pwelch(DiBanZ,window2,noverlap,nfft,Fs,range); w_DiBanZ=wk(f);aw_DiBanZ=my_inter(Pxx_DiBanZ,w_DiBanZ);aw_DiBanZ1=my_inter(Pxx1_DiBanZ,w_DiBanZ);aw_DiBanZ2=my_inter(Pxx2_DiBanZ,w_DiBanZ);aw2=(aw_SitX2*aw_SitX2+aw_SitY2*aw_SitY2+aw_SitZ2*aw_SitZ2...+0.8^2*aw_KaoBeiX2*aw_KaoBeiX2+0.5^2*aw_KaoBeiY2*aw_KaoBeiY2...+0.4^2*aw_KaoBeiZ2*aw_KaoBeiZ2+0.25^2*aw_DiBanX2...+0.25^2*aw_DiBanY2*aw_DiBanY2+0.40^2*aw_DiBanZ2*aw_DiBanZ2)^0. 5aw1=(aw_SitX1*aw_SitX1+aw_SitY1*aw_SitY1+aw_SitZ1*aw_SitZ1...+0.8^2*aw_KaoBeiX1*aw_KaoBeiX1+0.5^2*aw_KaoBeiY1*aw_KaoBeiY1...+0.4^2*aw_KaoBeiZ1*aw_KaoBeiZ1+0.25^2*aw_DiBanX1...+0.25^2*aw_DiBanY1*aw_DiBanY1+0.40^2*aw_DiBanZ1*aw_DiBanZ1)^0. 5aw1=(aw_SitX*aw_SitX+aw_SitY*aw_SitY+aw_SitZ*aw_SitZ...+0.8^2*aw_KaoBeiX*aw_KaoBeiX+0.5^2*aw_KaoBeiY*aw_KaoBeiY...+0.4^2*aw_KaoBeiZ*aw_KaoBeiZ+0.25^2*aw_DiBanX...+0.25^2*aw_DiBanY*aw_DiBanY+0.40^2*aw_DiBanZ*aw_DiBanZ)^0.5%各轴向频率加权函数function [wc] = wc(f)wc=1.*(f<8&f>=0.5)+8./f.*(f>=8&f<80);endfunction [wd] = wd(f)wd=1.*(f<2&f>=0.5)+2./f.*(f>=2&f<80);endfunction [we] = we(f)we=1.*(f<1&f>=0.5)+1./f.*(f>=1&f<80);endfunction [wk] = wk(f)wk=0.5.*(f<2&f>=0.5)+f./4.*(f>=2&f<4)+1.*(f>=4&f<12.5)+12.5./ f.*(f>=12.5&f<80);endhanli.m wc.m wd.m we.m wk.m。
航天员震动座椅原理-概述说明以及解释

航天员震动座椅原理-概述说明以及解释1.引言1.1 概述航天员在长时间太空探索任务中扮演着至关重要的角色。
由于长时间在重力环境中的失重状态,航天员身体会受到许多不良影响,如肌肉萎缩、骨质疏松等。
为了保障航天员的身体健康和任务执行的效能,航天员震动座椅被设计和应用。
航天员震动座椅是一种能够模拟地球重力环境的装置,通过震动和振动使航天员的身体得到有效的锻炼和刺激。
其原理基于震动和振动对人体产生的生理反应和适应性。
航天员震动座椅的设计理念来源于地球上的运动锻炼。
在地球上,人们通过跑步、慢跑、健身器械等形式的运动来保持身体健康。
而在太空中,由于失重状态,传统的运动形式不再适用。
因此,航天员震动座椅作为一种太空健身器械应运而生。
通过模拟地球上的运动锻炼,航天员震动座椅能够唤醒航天员的肌肉、骨骼和神经系统。
其机构内置了一系列感应器和振动元件,可以根据航天员的身体状况和需要进行精确的调节。
通过高频振动和定时震动,航天员的肌肉得到了良好的刺激,从而促进了肌肉的生长和功能的恢复。
同时,航天员震动座椅还能够提高航天员的平衡能力和协调性,增强机体的稳定性和适应性。
航天员震动座椅的应用已经成功地在太空探索任务中展开。
航天员们在太空中进行定期的震动座椅训练,有效地缓解了肌肉萎缩和骨质疏松的问题。
这不仅有助于航天员的健康,还能提升任务的执行效能和成就。
总之,航天员震动座椅的概念和应用为太空探索任务带来了重要的突破和创新。
通过模拟地球重力环境,航天员的身体得到了有效的锻炼和刺激。
未来,随着科学技术的不断进步,航天员震动座椅的功能和效能将得到进一步的完善和提升,为航天事业的发展作出更大的贡献。
1.2 文章结构【文章结构】本文主要分为引言、正文和结论三个部分。
1. 引言引言部分包括概述、文章结构和目的三个小节。
在概述中,简要介绍了航天员震动座椅的背景和重要性。
接着,在文章结构中,详细说明了本文的组织结构和各个部分的内容。
最后,在目的部分,阐述了本文的写作目的和意义。
座椅导轨振动目标

座椅导轨振动目标
座椅导轨振动目标是指在设计和制造汽车座椅时,为了提高乘坐
舒适性和减少振动而设定的目标。
这些目标通常包括以下几个方面:
1. 减少振动传递:通过优化座椅导轨的结构和材料,可以减少路
面颠簸和振动对乘客的影响,提高乘坐舒适性。
2. 提高振动吸收能力:座椅导轨可以采用吸振材料或设计吸振结构,以吸收和减少振动,提高乘坐舒适性。
3. 降低噪音:通过优化座椅导轨的设计和制造工艺,可以降低座
椅在振动时产生的噪音,提高车内安静度。
4. 提高稳定性:座椅导轨需要具有足够的强度和稳定性,以确保
在车辆行驶过程中座椅不会出现松动或晃动的情况,提高乘坐安全
性。
座椅导轨振动目标是为了提高汽车座椅的舒适性、稳定性和安全性,为乘客提供更好的乘坐体验。
单自由度人体—座椅模型舒适性的仿真研究

从表格中的数据可以看出,弹簧刚度对座椅的固有频率 f0、最大传递率 A、10Hz 传递 90 率 B 和舒适性指数 R 值[15]均有影响,f0、A、B 均随弹簧刚度的增大而增大,10Hz 传递率增 大的幅度相对较小,舒适性指数 R 值随弹簧刚度的增大而减小,变动较为显著,也可见 f0、 A、B 均增大,R 值必定减小。阻尼值对最大传递率 A、10Hz 传递率 B 和舒适性指数 R 值有 影响, 固有频率随阻尼有所波动, 因为在阻尼不大的情况下, 它对系统固有频率的影响很小, 基本可以忽略,舒适性 R 值随阻尼值的增大而增大,主要原因为最大传递率 A 随阻尼的增 95 大而减小并且很显著[16],阻尼越大对运动的衰减程度越大。
座椅的几何模型的源文件为 CATIA 文件,来源为李尔汽车零件(武汉)有限公司,座 椅的几何模型要经过查看分析各部分的连接情况 [3],期间分析的座椅骨架的结构及连接方 40 法、各部分的功用及大致的材料情况[4],查看了座椅坐垫和靠背的模型构造[5],然后从将模 型从 CATIA 文件导出 STP 文件, 在 Pro/E 软件中从新定义座椅的坐标点, 以便于在 ADAMS
表 1 传递特性曲线上所需数据 Tab.1 Transfer characteristic curve on the required data 共振频率 f0 处 频率(Hz) 传递率 X/Y 2.98 4.04 2.54 2.78 -2A/ 2 处
10Hz 处 3.37 2.81 10.00 0.14
25
30
0 引言
在本章,要进行座椅动态舒适性的仿真研究,要将座椅的实体模型导入 ADAMS 软件 中建立虚拟样机,根据座椅动态舒适性实验标准进行仿真。主要分析座椅的传递特性[1],座 35 椅的力学试验结果[2]。分析得到的仿真曲线,计算座椅舒适性的评价指标。最后进行简单理 论计算,对比结果。
GB-5081999-生产设备安全卫生设计总则

生产设备安全卫生设计总则GB5083-19991范围本标准规定了各类生产设备安全卫生设计的基本原则、一般要求和特殊要求。
本标准适用于除空中、水上交通工具,水上设施,电气设备以及核能设备之外的各类生产设备。
本标准是各类生产设备安全卫生设计的基础标准。
制订各类生产设备安全设计的专用标准,应符合本标准的规定,并使其具体化。
2引用标准下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。
本标准出版时,所示版本均为有效。
所有标准都会被修订,使用本标准的各方应探讨使用下列标准最新版本的可能性。
GB2893—1982 安全色GB2894—1996安全标志GB4053. 1——1993固定式钢直梯安全技术条件GB4053. 2——1993固定式钢斜梯安全技术条件GB4053. 3——1993固定式工业防护栏杆安全技术条件GB4053. 4——1983固定式工业钢平台GB/T6527. 2—1986安全色使用导则GB10434—1989作业场所局部振动卫生标准GB12265—1990机械防护安全距离GB/T14774—1993工作座椅一般人类工效学要求GB/T14775—1993操纵器一般人类工效学要求GB15052—1994起重机械危险部位与标志GB50034—1992工业企业照明设计标准GBJ87—85工业企业噪声控制设计规范3定义本标准采用下列定义:3. 1 生产设备production facilities生产过程中,为生产、加工、制造、检验、运输、安装、贮存、维修产品而使用的各种机器、设施、装置和器具。
3. 2 安全卫生防护装置safety and health guard device配置在生产设备上,起保障人员、生产过程和设备安全卫生作用的附属物件或设施。
4基本原则4.1生产设备及其零部件,必须有足够的强度、刚度、稳定性和可靠性。
在按规定条件制造、运输、贮存、安装和使用时,不得对人员造成危险。
坐姿人体垂向振动特性及其两自由度模型_高江华
(3)
其中 M diag(m0 , m1 , m2 ), 而
4
4.1
坐姿人体垂向振动特性与模型参数
试验结果与个体模型参数
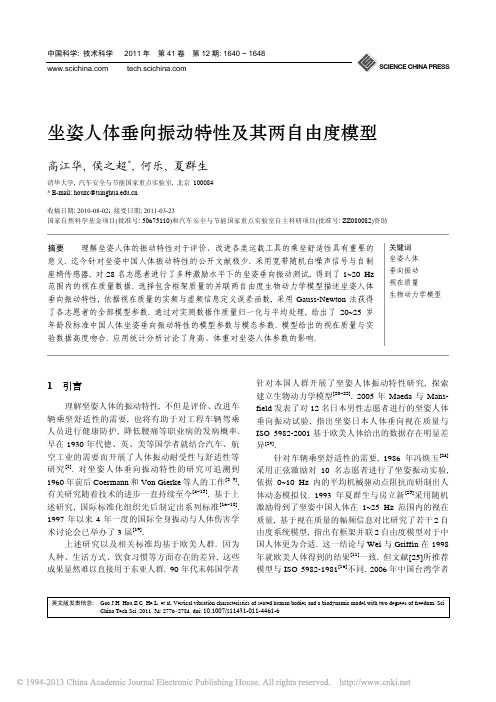
图3 1642
含框架质量的并联两自由度模型
依据第 2 节定义的条件与要求先后对 28 名志愿 者进行了测试. 其中男性 18 名、女性 10 名, 年龄为 20~37 岁、平均年龄 24 岁, 身高为 152~180 cm、平
GFa ( ) 和 Gaa ( ) 分别为对应的力-加速度互功率谱与
加速度自功率谱. 试验系统如图 1 所示, 图 2 为测试用座椅实物照 片. 参考 ISO 5982-2001 标准, 测试条件统一明确为: 直立坐姿、无靠背、脚平放于振动台上、上臂自然下 垂、双手平行放置于身前大腿上. 参考 GB10000-88[31], 座椅框架尺寸设计为 480 mm×400 mm×360 mm、 座椅面板尺寸为 500 mm× 400 mm×12 mm 以保证人体落座时重心位于座椅面板中 心, 坐深、坐宽和坐高也都满足标准要求. 座椅面板 为铝板 , 面板与力传感器的支撑底座采用角钢焊接 而成, 实测框架结构固有频率高于 80 Hz. 4 个力传感 器为组合梁结构剪切式应变力传感器, 量程 200 kg、 频带范围 0~20 Hz, 分别位于座椅面板四角下方. 2 个 加速度传感器均为压电式加速度计 BK4383, 频带范 围 0.01~20 kHz, 分别安装于座椅面板底面中心处和 振动台面上. 力传感器弹性元件以上部分, 包括座椅 面板, 共重 8.4 kg. 电液伺服振动台为日本鹭宫公司 生产的 EVH20-100-10, 最大行程±100 mm、 频带范围 1.0~200 Hz. LabView 产生的宽带随机白噪声信号通过 A/D
汽车理论6.6
思考:当考虑了 座椅以后,传递 给人体的振动加
速度发生了哪些
变化?
3
第六节 “人体—座椅”系统的振动
二、“人体—座椅”系统的参数选择
人体垂直方向最敏感的频率范围是4~12Hz 座椅的减振频率是
f 2 fs
f 4Hz
f s 4Hz / 2 3Hz
“人体—座椅”系统的固有频率不能取得太小,否 则与车身部分固有频率 f0 重合,传至人体的振动加速
系统的幅频特性,与车身单质量系统 的幅频特性相同。
1 2 ζ λ 2 s s p/z 2 2 2 2 1 λs 2 ζ s λs
1 2
s / s
s
Ks ms
s Cs / 2 K s ms
2
第六节 “人体—座椅”系统的振动
第六章 汽车的平顺性
汽车理论
第六节
“人体—座椅”系统的振动
返回目录
1
第六节 “人体—座椅”系统的振动
一、“人体—座椅”系பைடு நூலகம்的传递特性
2 p z p p z z2 q 2 q q z
2 z p p q z2 q
p / z 2 是“人体—座椅”单质量
度会出现峰值,这对平顺性不利。
希望“人体—座椅”系统的阻尼比达到0.2以上。
4
第六节 “人体—座椅”系统的振动
本节内容结束
下一节
5
汽车系统动力学第十章 人体对振动的反应

第十章人体对振动的反应§10-1 概述人体对振动的反应相当复杂,由于人体本身就是一个复杂的振动系统,因此人体对振动的反应不仅取决于振动的强度,而且还与频率有关。
对不同的人、不同的姿势、不同的身体部位、不同的作用位置和方向,对振动的反应都会不同。
这就是说,与振动频率有关的舒适性评价应包含客观测量和主观感觉两个方面。
在车辆乘坐舒适性评价中,主要以“坐姿”受振模型来展开讨论。
关于人体对振动的反应,首先可将振动输人按以下属性分类:1)振动的幅值和频率。
2)作用的位置和方向。
3)作用时间。
人体对振动的反应还可以按照各种不同的方式分类,如:健康状况、舒适程度、工作效能、主观感觉、晕车反应等。
然而,人对振动的反应方式可能在很大程度上受外界因素的影响,如期望、动机、疲劳、刺激以及个人心理与生理方面的差别和变化等。
所有这些不确定的主观因素均影响着人体对振动的反应程度。
虽然对车辆乘坐舒适性的定量评价一直是个有争议的问题,但随着研究结果与数据的完善,制定的标准日趋合理。
§10-2 标准最广泛采用的车辆舒适性评价标准来自于IS02631,国际标准化组织ISO于1974年颁布了IS02631的最初版本——《人体承受全身振动评价指南》。
然而该标准决非为确定性的,随着测量数据的不断增多,ISO对1974年的最初版本已经进行了大量的、有实际意义的修订。
在20世纪80年代,ISO263l的修订版,即被称做第五草案(Draft 5)出版。
该标准在处理方法上与最初版本基本相同,只是某些细节上有所区别,并且两个标准在舒适性评价中均规定了12个振动分量,3个座椅平动、3个座椅转动、3个靠背平动和3个脚支撑面平动。
标准中分别对这12个振动分量规定了频率加权函数和轴向加权因子,这样就可以根据各分量的方均根矢量的计算得出一个单一的数值,以此来表示振动的激烈程度。
下面对有关标准的发展过程及内容介绍如下。
最初的IS02631标准(1974年版)推荐值均以试验数据为依据。
汽车座椅按摩原理

汽车座椅按摩原理汽车座椅按摩系统利用的是机械振动、热能和压力刺激的原理,为乘客提供舒适、放松的按摩体验。
汽车座椅按摩原理可以分为机械振动按摩原理、热能按摩原理和气压按摩原理三大类。
一、机械振动按摩原理机械振动按摩是通过振动按摩装置直接作用于人体,刺激肌肉、神经和血液循环系统,从而改善人体疲劳、消除压力,并达到舒缓、放松身体的效果。
汽车座椅按摩使用的机械振动按摩系统通常包括一个按摩头、一个马达和转轮机构。
按摩头通过马达带动转轮机构实现外转、内转和摆动运动,产生特定频率的振动,这种振动的能量能够直接作用于人体。
当人体接触到按摩头发出的振动时,振动能够传递到人体的肌肉组织中,产生振动按摩的效果。
振动按摩能够促进肌肉的血液循环,增强肌肉的松弛感,同时还能够促进细胞的代谢和淋巴系统的清洁。
二、热能按摩原理热能按摩是通过加热装置将温度升高,并利用其对人体的刺激作用来达到按摩效果的方法。
汽车座椅按摩使用的热能按摩系统通常包括加热元件和温度传感器。
加热元件通常使用电热片或发热电线,通过电流加热,使温度升高。
温度传感器可以测量加热元件的温度,并根据温度范围设定,在恰当的时间内自动关闭或调整温度。
当人体接触到加热后的汽车座椅时,加热能够直接作用于皮肤、神经和血管系统,从而达到舒缓局部肌肉的效果。
热能按摩也可以促进新陈代谢,加速身体的代谢过程,从而达到瘦身、美容和排毒的效果。
气压按摩是通过空气袋和压力控制系统,利用气压来按压、揉、挤压肌肉,从而达到按摩效果的方法。
汽车座椅按摩使用的气压按摩系统通常包括气压袋、压力控制系统和空气泵。
气压袋通常被放置在车座椅背面、座垫上部和座垫下部等位置。
空气泵通过管道将气体输送到气压袋中,通过压力控制系统控制气体进出,实现按摩的效果。
当汽车座椅按摩开始工作时,空气泵将气体推入气压袋,产生按压、揉动和挤压等不同的按摩效果。
气压按摩能够刺激肌肉和神经系统,增强肌肉弹性和舒适感,同时还能够促进血液循环和淋巴系统的清洁,达到舒缓、放松身体的效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
人体—座椅” 第六节 “人体—座椅”系统的振动
本节内容结束
下一节
5
f ≥ 2 fs
f = 4Hz
fs ≤ 4Hz / 2 = 3Hz
“人体—座椅”系统的固有频率不能取得太小,否 人体—座椅”系统的固有频率不能取得太小, 重合, 则与车身部分固有频率 f0 重合,传至人体的振动加速 度会出现峰值,这对平顺性不利。人体—座椅”系统的阻尼比达到 以上 以上。 希望“人体—座椅”系统的阻尼比达到0.2以上。
&& z p p &&2 = & & q z2 q
p / z2 是“人体—座椅”单质量 人体—座椅”
系统的幅频特性, 系统的幅频特性,与车身单质量系统 的幅频特性相同。 的幅频特性相同。
1+ (2 ζ λ )2 s s p/z2 = 2 2 2 1− λs + (2 ζ s λs )
1 2
(
)
λs = ω / ωs
ωs =
Ks ms
ζ s = Cs / 2 Ksms
(
)
2
第六节 “人体—座椅”系统的振动
思考:当考虑了 思考: 座椅以后, 座椅以后,传递 给人体的振动加 速度发生了哪些 变化? 变化?
3
第六节 “人体—座椅”系统的振动
二、“人体—座椅”系统的参数选择
人体垂直方向最敏感的频率范围是4~ 人体垂直方向最敏感的频率范围是 ~12Hz 座椅的减振频率是
第六章 汽车的平顺性
第六节 “人体—座椅”系统的振动
人应该由两个质量构 成,人—椅系统最好用三 自由度或两自由度表示。 自由度或两自由度表示。
本书将人体视为单质量 系统考虑, 系统考虑,故简化为单自由 度系统。 度系统。
1
第六节 “人体—座椅”系统的振动
一、“人体—座椅”系统的传递特性 —
&& && && p &&2 z p p z = = & z & & q &&2 q z2 q