视频同步分离芯片LM1881及其应用
实验二十五摄像机原理实验
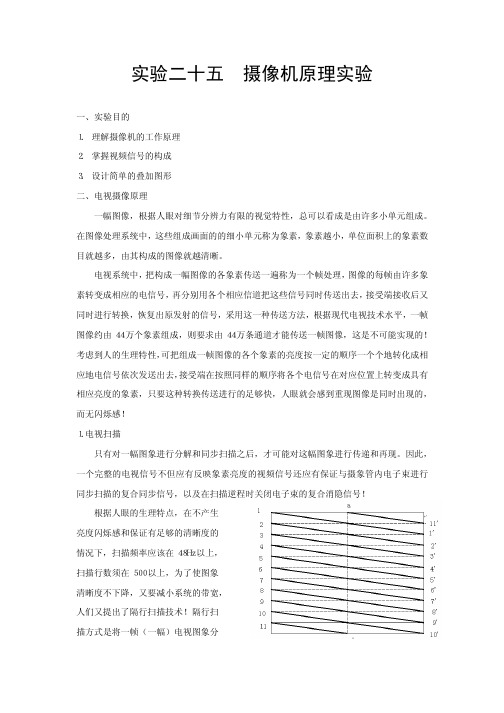
描在荧光屏上出现回扫线,将对正程的图像造成干扰,影响图像的清晰度。因此需使电视机 在行、场扫描逆程期间电子束截止,以消除行、场逆程回扫线,即实现消隐。方法是在电视 台由同步机发出消隐信号使接收机显像管在行、 场逆程扫损期间关断电子束。 由于电视扫描 方式是水平(行扫描)和垂直扫描(场扫描)构成的,所以对应分别有水平消隐(行消隐) 和垂直消隐(场消隐),而两者形成复合消隐信号。行消隐脉冲的宽度一般为 12us,场消隐 脉冲宽度一般为 25TH,如下图: 12 行消隐脉冲(单位:us) TH=64
(b) 行锯齿电流 (c) 只有行扫描时电子束轨迹 场扫描锯齿电流及场偏转轨迹如下图所示:
2.亮度视频信号 视频输出的电压大小, 反映了一行中对应象素的明暗程度, 视频信号具有正负极性之分, 对于正极性视频信号, 象素越亮信号的幅度越大, 而对于负极性视频信号则相反, 象素越亮, 信号的幅度越小! 3.复合消隐信号 电视系统中.扫描正程期间传送图像信号,逆程期间不传送图像信号。电子束逆程扫
− dφ / φ 与通过的路程 dx 成正比,即
−
dφ = µa dx φ
(2.1)
将上式从 0 到 x 积分,得到 x 处的辐射能通量
φ ( x) = φ (0)e − µa x
−1
(2.2)
式中, µa 为吸收系数,是个有量纲的量,当 x 以米为单位时, µa 的单位是 m ;φ (0) 为 x=0 处的辐射功率。由式(2.2)可见,当辐射在媒质中传播 1/ µ a 距离时,辐射能通量就衰 减为原来值得 1/ e 。 除去吸收外,散射也是辐射衰减原因之一。设有一辐射能通量为 φ 的平行辐射束,入射 到包含许多微粒质点的非均匀媒质上, 由于媒质内微粒的散射而衰减的相对值 dφ / φ 与通过 的距离 dx 成正比,即:
摄像头车常见问题解答
用MC33886实现电机的正反转。
答:看MC33886的Datasheet我们可以知道如下的事实:
IN1
IN2
OUT1 OUT2高电平 低电来自 高电平 低电平电机正转
低电平 高电平 低电平 高电平
电机倒转
这样不就可以实现电机的正反转了么?为什么还得设计正反转电
法保证单片机输出的两路PWM波幅值正好相反,所以不可以这样来
实现电机的正反转。
指点:我们可以通过设计一个数字电路,来保证两路PWM波幅
值正好相反,不妨试试!
为什么电机满占空比跑,速度也特慢?
答:现象重述: (1)电机空载时转速正常。 (2)电机带载时转速不正常,即使满占空比速度也特慢,
显得很没劲。 空载:车轮不接触物体时,电机空转。 带载:车轮接触地面时,称电机带载工作。
电容: a)数字前两位为有效数字,而第三位为倍率。 例如:104 表示:10×10的4次方pF = 10×10000pF = 0.1uF 105 表示:10×10的5次方pF = 10×100000pF = 1uF
如下是串口电路,摄像头组用来看图像的 必备工具。
电平的概念和串口偷电问题。
计算机采用RS232电平:高电平(逻辑1)的电平为 -15V ~ - 5V ,低电 平(逻辑0)的 电平为 +5V ~ +15V ,-5V ~ +5V 为无效状态。
一般是两端各使用一个大电容并联一个小电 容进行滤波,大电容滤除低频干扰,小电容 滤除 高频干扰,各电容的容值要根据干扰的大小进行 计算选取,由于我们不需要那么高 的精度,所以 就随便找一个大电容并联一个小电容使用。
其次,输出端的大电容还可以增强稳压效果, 当输出端电压突然被拉低时,大电容通过放电进 行补偿,保证输出仍然是5V。
毕业设计(论文)-电梯楼层显示器的设计模板
前言目前电梯的生产情况和使用数量成为一个国家现代化程度的标志之一。
电梯是机电一体的高层建筑的复杂运输设备。
它涉及机械工程、电子技术、电力电子技术、电机与拖动理论、自动控制理论等多个科学领域。
电梯楼层显示器用于给出每一楼层的呼叫请求信息,并显示电梯当前运行情况。
乘客可以通过显示器、按键等了解到电梯运行的大量信息。
同时随着安全防护要求的不断提高,电梯监控也开始被提上日程,电梯楼层显示器作为电梯监控系统的一个主要控制设备,发挥着重要作用。
它将电梯的上下运行楼层及电梯标号等叠加在电梯摄像机的视频图像上。
因此,保安人员能准确地获知出人大楼的人员所在楼层,以便及时处理各种情况。
当大楼发生案件时,根据历史记录图像能够很好地分析进出人员的活动情况,以帮助破案。
电梯楼层显示将在小区高层电梯及智能大楼电梯内获得广泛的应用。
本文设计的楼层显示器具有以下特点:①采用红外线传感器识别楼层,防止电梯内电磁干扰,有更好的可靠性;②系统掉电后视频输人与视频输出直通,保证视频连续输出;③没有视频输人时也能显示楼层相关信息,并会给出提示;④能够显示~19~99楼层数,并可随意更改楼层显示表,方便一些有夹层或者有漏层的大厦安装;⑤楼层显示数可附加字符,方便一些特殊楼层显;⑥字符镶边,无论背景亮暗均可清晰显示;⑦字符可全屏移动,大小可调,适用于分割器和硬盘录像机;⑧无需接监视器,在安装现场即可独立调试系统状态,安装极为方便:支持新电梯监控系统安装和旧电梯监控系统进行改造;⑨可以设置1~12个字符的电梯名称;⑩自带国标一、二级汉字库。
第一章电梯楼层显示器的总体方案电梯楼层显示器采用双AT89S52单片机作为主要控制芯片,与MB90092、LM1881、AM29F080B、AT24C64等芯片共同构成电梯楼层显示器的核心器件。
此系统从功能上可分为上位机、下位机。
上位机主要作用是运行视频叠加功能,根据控制面板输人控制指令把相应的字符信息叠加到视频输人信号上,并对视频输人信号具有监控和报警功能;下位机是一个单片机系统,将控制面板的输人信息传到上位机,并用LED显示相应的控制状态。
行场同步显示原理.

我们知道在电视系统中,为了能正确地重现图像,要求收端(监视器)与发端(摄像头)同步扫描。
只要扫描频率相同、起始相位相同,收端就可以重现发端图像并认为是同步的。
当收端、发端的频率、相位不同时,图像将被破坏,产生畸变,甚至无法重现,因此在图像信号中加入了同步脉冲。
在发送端,每当扫完一行图像时,加入一个行同步脉冲,每扫完一场图像时加入一个场同步脉冲。
它们与图像信号一起被发送出去。
在接收端,使行扫描锯齿波电流只有当行同步脉冲到达进才开始逆程期,而场扫描齿波电流也只有在场同步脉冲到达时才开始逆程期。
这样就保证了同步。
为了使扫描逆程光栅不显示(消隐),还需要加入行、场消隐脉冲,这时的图像信号电平成为消隐电平。
摄像头输出的是将图像信号,同步信号,行、场消隐信号这三种信号组合起来形成的黑白全电视信号。
我国电视规定:行频为15625Hz,行同步脉宽为4.7μs;场频为50Hz,场同步脉宽为2.5×1/15625=160μs。
因此若要人为的在视频中加入十字坐标显示,则需在摄像头输出的视频信号中将行场同步分离,并在指定的行和场叠加高脉冲信号。
原理框图及实现方案如下:点击看原图图1、视频十字座标显示原理框图一、行场同步分离在该方案中,使用专用芯片LM1881将行、场同步脉冲分离出来。
LM1881是正极性图像信号输入、TTL电平输出芯片,从而简化了电路。
图2是LM1881的连接图以及工作波形示意图。
正极性图像信号从2脚输入,在1脚和3脚分别输出复合同步信号和场同步信号。
5脚输出后沿脉冲信号,作为钳位放大器的钳位脉冲输入。
7脚输出奇偶场指示信号。
图2、LM1881连接图及工作波形示意图二、在显示器指定位置画线图3、视频信号波形1)在显示器中指定的列画点在视频信号中,一个行同步脉冲表示扫描一行,而一个行同步脉冲上所叠加的大小不同的模拟量则表示一幅画面在这一行中不同的灰度值,模拟电压值越大灰度越小;因此若要在监视器中某列显示一个亮点,则只需要在该同步脉冲的一个周期内将指定列处的模拟电压值变大即可。
车模转向舵机机械结构的设计

基于反射式红外传感器的光电传感器阵列的路径检测方法具有较高的可靠性与稳定性,信息更新速度快且易于单片机处理。
但是它易受环境光线干扰,而且存在着检测距离近的问题,硬件电路复杂。
为了获得远方的信息需要将传感器伸得尽可能远,从而增加了车体高速行驶时的转动惯量,限制了智能车的最高速度。
基于黑白面阵CCD传感器的路径检测方法具有以上两种方案的所有优点,同时面阵CCD输出的是复合视频信号,采集到的信息将是前方整个一幅图像。
利用S12单片机内部的A/D转换器,并配合从视频信号分离出的同步信号,该单片机可以直接将图像信号采集到其内部的RAM中,然后通过软件对图像信息进行处理。
这样不仅可以识别道路的中心位置,同时还可以得到赛路的方向、赛道的曲率等信息。
这样可以有效地对车模进行运动控制,提高车模路径跟踪速度和运行速度。
但是面阵CCD的延迟比较大(20ms),因此对信息的采集和处理有一定的约束。
综合以上分析,为了更多的获得路况信息和取得大的前瞻,本设计选择黑白面阵CCD传感器方式,并对其进行了改进。
循迹是指模型车在白色地板上循黑线行走,通常采取的方法是通过光点传感器探测的方法。
本设计采用的是黑白面阵CCD摄像头传感器。
实际上对于模型车的控制并不要求分辨率很高的摄像头,相反分辨率低一些的图像更有利于减少存储所用的空间,加快单片机进行图像处理的速度,而且可以获得足够的有用信息来控制小车。
CCD摄像头输出信号是标准的视频复合信号,一路信号利用同步信号分离芯片LM1881将其分离,然后输入给单片机的I/O口,另一路信号直接输入到二值化比较器,将模拟视频信号进行二值化后输入单片机的I/O 口。
通过软件的分析与处理,并采取相应的控制算法,控制单片机输出相应的PWM信号来控制舵机和电车模转向舵机机械结构的设计转向系统在车辆运行过程中有着非常重要的作用,合适的前桥调整参数可以保证在车辆直线行驶过程中不会跑偏,即保证车辆行驶的方向稳定性;而在车辆转向后,合适的前桥可以使得车辆自行回到直线行驶状态,即具有好的回正性。
AT1881说明书
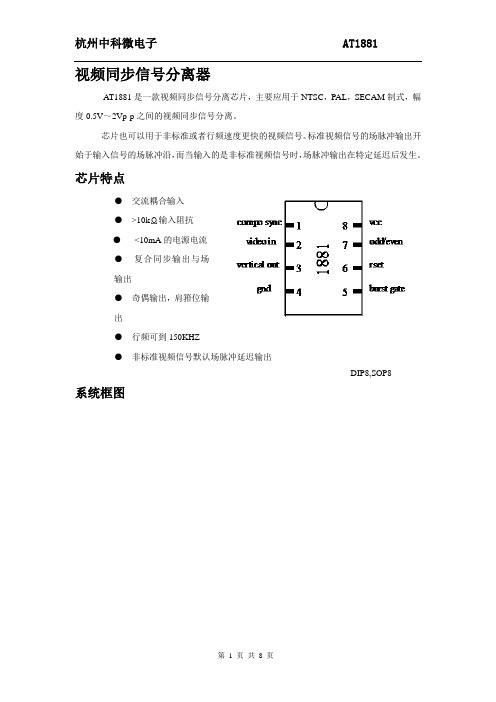
视频同步信号分离器AT1881是一款视频同步信号分离芯片,主要应用于NTSC,PAL,SECAM制式,幅度0.5V~2Vp-p之间的视频同步信号分离。
芯片也可以用于非标准或者行频速度更快的视频信号。
标准视频信号的场脉冲输出开始于输入信号的场脉冲沿,而当输入的是非标准视频信号时,场脉冲输出在特定延迟后发生。
芯片特点●交流耦合输入●>10kΩ输入阻抗●<10mA的电源电流●复合同步输出与场输出●奇偶输出,肩箝位输出●行频可到150KHZ●非标准视频信号默认场脉冲延迟输出DIP8,SOP8系统框图管脚说明:电气参数极限参数功能描述:AT1881设计用来从混合的源视频信号里分离同步信号,源视频信号输入幅度从0.5Vp-p 到2Vp-p都可以很好地工作。
工作电源电压从5V到12V,除电源和输入耦合电容外,需要的外围器件只有内部电流调节的电阻rset以及它的去耦电容。
AT1881从源信号中产生四路同步信号:包含了行场扫描的复合同步信号、场同步脉冲信号、前后肩箝位脉冲信号以及奇偶场输出信号。
A T1881的输出信号可以用于锁定摄像头和摄像机的视频信号,辨别内存存储的区域,恢复被污染的同步信号,也可以为解码的扫描步点提供时间基准。
通过下图中A T1881的输入输出信号示例,我们可以更为直观地了解其功能特性复合输出复合输出(见figure2的b图)实际上是将电位比黑电平高的视频信号完全滤除,而比它的电位低的信号重新生成的一个同步信号。
芯片电路首先把视频信号电位基准箝位在1.5V(2脚);然后通过一个比较器,高于开关电位的信号将被滤除,其余信号通过缓冲器到1脚输出。
开关电位一般设置成70mV,开关电位与输入信号幅度无关,对于0.5Vp-p的信号来说,相当于同步脉冲幅度的一半,而对于2Vp-p则相当于11%。
一般的,输入耦合电容上的充电电流达到8mA,而放电电流只有11uA,所以建议耦合电容取0.1uF。
电十字分划发生器技术报告

电十字分划发生器技术报告班级/姓名:030110/刘亚亮030109/林丽玲一、电十字分划发生器设计技术指标要求1.1水平的电子线宽度为1根扫描线宽(固定) 垂直的电子线宽度为正常和超细模式可选择。
1.2可显示白线和黑线,亮度可连续调节。
1.3自动记忆当前十字线的位置数据,开机后自动调出。
1.4视频信号输入:PAL/ VS:1.0V(p-p)/75Ω。
1.5视频输出:输入的信号与电子线混合输出1.0V(p-p)/75Ω。
电子线可移动范围占图像画面的98%以上。
1.6准确度:水平±1个象元,垂直±1行。
二、电十字分划发生器原理电十字分划发生器采用视频信号叠加原理。
用CCD采集到的视频信号,识别出场同步和帧同步信号,应用视频处理芯片,通过外挂字符或图像的方法,在视频信号传输过程中,应用视频切换的方法,实现在原有视频图像中叠加上十字分划线。
本仪器所用的视频信号是黑白全电视信号。
1、黑白全电视信号电视是根据人眼的视觉特性,用电子学的方法,实时地传送活动或静止图像的技术。
一幅图像由许许多多像素组成。
像素越小,单位面积上的像素数目就越多,由其构成的图像就越清晰。
电视系统中,把构成一幅图像的各个像素传送一遍称为进行了一个帧处理,或者称为传送了一帧。
在传送时可以把图像不同位置上具有不同亮度的像素转变成相应的电信号,再分别用各个相应信道把这些信号同时传送出去,接收端接收后又同时进行转换,恢复出原发射信号。
现代视频信号分为黑白视频信号和彩色视频信号。
电视系统要完成图像信号的传输,不失真的重现原图像,除必须传送图像信号这一主题信号之外,为保证收发同步、逆程不显示光栅及隔行扫描均匀嵌套,还必须传送复合同步信号,复合消隐信号,槽脉冲和均衡脉冲信号等辅助信号。
将以上主体信号与辅助信号统称为全电视信号。
黑白全电视信号中,电视信号每秒传送25 帧图像,采用隔行扫描,每帧图像分两场传送,奇数场传送奇数行,偶数场传送偶数行。
基于视频分离芯片LM1881的图像采集系统设计
基于视频分离芯片LM1881的图像采集系统设计
朱广
【期刊名称】《机械工程师》
【年(卷),期】2009(000)012
【摘要】介绍了基于视频分离芯片LMl881的图像采集系统设计,LMl881芯片能够将电视视频信号中行同步、场同步、奇/偶场等信号准确地分离出来,为控制图像的采集提供了保障.文中以LM1881在图像采集系统中的应用为例,介绍了图像采集系统软硬件设计过程.
【总页数】3页(P81-83)
【作者】朱广
【作者单位】安徽建筑工业学院,机电学院,合肥,230601
【正文语种】中文
【中图分类】TP224
【相关文献】
1.视频同步分离芯片LM1881及其应用 [J], 葛亚明;刘涛;王宗义
2.基于FPGA和视频解码芯片的实时图像采集系统设计 [J], 杜林奇;许开宇;张欣璐
3.基于视频解码芯片与CPLD的实时图像采集系统 [J], 李超纯;李亚兰;李小飞;杨特育;李志扬
4.基于视频采集的超声图像采集系统设计实现 [J], 侯庆锋;李月卿;王昌元;张军毅
5.基于DSP和nRF2401芯片的数字无线视频采集系统设计 [J], 张克满;史仪凯
因版权原因,仅展示原文概要,查看原文内容请购买。
摄像头工作原理详解

摄像头工作原理详解摄像头的工作原理摄像头的工作原理大致为:景物通过镜头(LENS)生成的光学图像投射到图像传感器表面上,然后转为电信号,经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,再通过USB接口传输到电脑中处理,通过显示器就可以看到图像了感光芯片(SENSOR)是组成数码摄像头的重要组成部分,根据元件不同分为CCD(Charge Coupled Device,电荷耦合元件)应用在摄影摄像方面的高端技术元件。
CMOS(Complementary Metal-Oxide Semiconductor,金属氧化物半导体元件)应用于较低影像品质的产品中。
目前CCD元件的尺寸多为1/3英寸或者1/4英寸,在相同的分辨率下,宜选择元件尺寸较大的为好。
CCD的优点是灵敏度高,噪音小,信噪比大。
但是生产工艺复杂、成本高、功耗高。
CMOS的优点是集成度高、功耗低(不到CCD的1/3)、成本低。
但是噪音比较大、灵敏度较低、对光源要求高。
在相同像素下CCD的成像往往通透性、明锐度都很好,色彩还原、曝光可以保证基本准确。
而CMOS的产品往往通透性一般,对实物的色彩还原能力偏弱,曝光也都不太好。
所以我们在使用摄像头,尤其是采用CMOS芯片的产品时就更应该注重技巧:首先不要在逆光环境下使用(这点CCD同),尤其不要直接指向太阳,否则“放大镜烧蚂蚁”的惨剧就会发生在您的摄像头上。
其次环境光线不要太弱,否则直接影响成像质量。
克服这种困难有两种办法,一是加强周围亮度,二是选择要求最小照明度小的产品,现在有些摄像头已经可以达到5lux。
最后要注意的是合理使用镜头变焦,不要小瞧这点,通过正确的调整,摄像头也同样可以拥有拍摄芯片的功能。
目前,市场销售的数码摄像头中,基本是CCD和CMOS平分秋色。
在采用CMOS 为感光元器件的产品中,通过采用影像光源自动增益补强技术,自动亮度、白平衡控制技术,色饱和度、对比度、边缘增强以及伽马矫正等先进的影像控制技术,完全可以达到与CCD摄像头相媲美的效果。
附表机电工程学院-哈尔滨工程大学
我国每年因火灾造成的直接财产损失达10亿多,年均死亡2000多人。实践证明,随着社会和经济的发展,消防工作的重要性就越来越突出。因此我们希望能够做出一套自动化的模拟消防系统,对场地区域内实行全方位火灾监控,模拟“发现火源——报警——出警——寻找火源——灭火”的过程,实现全程自动控制。如果该系统大规模投入使用,将有利于确保火灾发生初期及时的报警,提高城市消防系统的效率,有效减少火灾对国民经济和人民生命财产造成的损失,具有广阔的市场前景。
博思商学社首届“模拟炒股大赛”优秀奖;
第四届“飞思卡尔杯”全国大学生智能汽车竞赛(摄像头组)东北赛区二等奖。
现担任哈尔滨工程大学校大学生科技协会副主席、07-414班科技委员。
二、经费预算合计:483元
序号
经费用途
预算依据
金额
1
EM-248型4相步进电动机2个
船舶电子大世界“龙宇电子”报价
120
2
IRF3205型MOS管9个
项目负责人
姓 名
马也
学号
07041415
专业及学历
自动化专业本科
研究项目主要内容和目的意义摘要
主要内容摘要:
该项目主要的研究内容是制作一套模拟消防系统,该系统由我们自制的场地、火灾监控报警系统和一个自动灭火小车组成。火灾监控系统对场地进行全局实时监控,一旦发现火源则通过无线模块自动报警,灭火小车接到报警后自动出警,到火灾发生地点实施灭火。整个系统模拟“监控——发现火源——报警——出警——寻找火源——灭火”的过程。
4.自动灭火小车能自动寻找到火源并准确灭火。
5.整个过程在尽可能短的时间内完成。
一、项目负责人从事科技创新经历(含以往获奖情况)
马也同学参加科技创新活动多年,曾先后获得:
应用于高速公路收费站的多路字符叠加系统的研究

应用于高速公路收费站的多路字符叠加系统的研究摘要:论文提出了一种基于分时复用原理的多路字符叠加系统。
该系统通过stc89c52控制字符叠加芯片mb90092进行多路视频的字符叠加,同时可以通过rs232与上位机进行通信。
该系统成本较低,性能稳定,可广泛应用于高速公路收费站的视频监控系统中。
关键词:多路;分时复用原理;字符叠加the research of multi-channel osd system used in highway toll stationjiang hui, li lan-jun(school of electric engineering, university of south china, hengyang, 421001, hunan ,china)abstract: this paper provides a multi-channel osd(on-screen display ) system based on time division multiplex access. in this system, mb90092 osd chip is controlled by stc89c52. and this system can communicate with the host computer via rs232. it’s a system of lower-cost,stable performance, can be widely applied to the highway toll video surveillance system.key words: multi-channel; time division multiplex access;osd0.引言近年来,随着视频监控领域的快速发展,字符叠加器越来越广泛应用于视频监控系统中。
在高速公路收费系统中,为了在监控过程中可以实时了解收费信息,需要将收费数据动态地插入到监控视频中。
基于CCD的智能车制作与调试系统设计
基于CCD的智能车制作与调试系统设计摘要:以“飞思卡尔杯”全国大学生智能汽车比赛为背景,基于S12微处理器设计了一个能自主识别规定路径的智能车。
通过软硬件的改进使智能车速度及稳定性有了较大的提高,并遵守大赛的各项规则。
1)采用新型16位“飞思卡尔”单片机MC9S12XS12,处理速度更快,性能更稳定;增强型捕捉定时器(ECT)模块提高了摄像头采集效果及系统的可靠性。
2)采用速度介入算法对舵机进行控制,克服了去年“弦切法”的不足,使得智能车行驶更稳定、快速。
3)采用BB_control控制算法提高了电机的响应速度,能满足小车在较高速度下的快速响应要求。
4)基于SD卡设计了智能车调试系统,能够对智能车行驶过程中的路径图像进行存储,并能通过上位机进行路径信息分析,方便了智能车调试。
通过对智能车设计方法的改进,在稳定性及快速性上有了很大提高,设计的SD卡调试系统有较好的应用价值。
关键词:CCD摄像头;智能车;SPI;MC9S12XS128;LM1881Abstract:This design with "freescale cup" national University Smart Car Competition as the background, S12 smart car microprocessor design provides a path to self-identify the smart car last year. Smart cars to be able to finish the course in the shortest time, and to comply with the rules of competition.1) Using the new 16, "freescale" SCM MC9S12XS12, processing speed faster, more stable performance. Enhanced capture timer (ECT) module improves the effect of camera acquisition and reliability of system.2) Intervention by the speed servo control algorithm to overcome last year's "tangential law" insufficient to make intelligent vehicles driving more stable and fast.3) Use BB_control control algorithm to improve the response of motor speed to meet the car at high speeds, rapid response requirements.4) SD card based on the design of intelligent vehicle system debugging, intelligent vehicles can travel the path of the process of image storage, and the path through the host computer information analysis, to facilitate debugging of smart cars.Based on the improvements of smart car design, the system have great increases both in stability and rapid. And the design of the SD card debug system has good application value.Keywords:CCD camera; Smart Car; SPI; MC9S12XS128; LM18811引言1.1设计背景本设计本文以“飞思卡尔”杯全国大学生智能汽车比赛为背景,制作一个在专门设计的跑道上能自主识别道路行驶的智能车,能在最短的时间里跑完跑道,且不脱离轨道。
视频分离电路
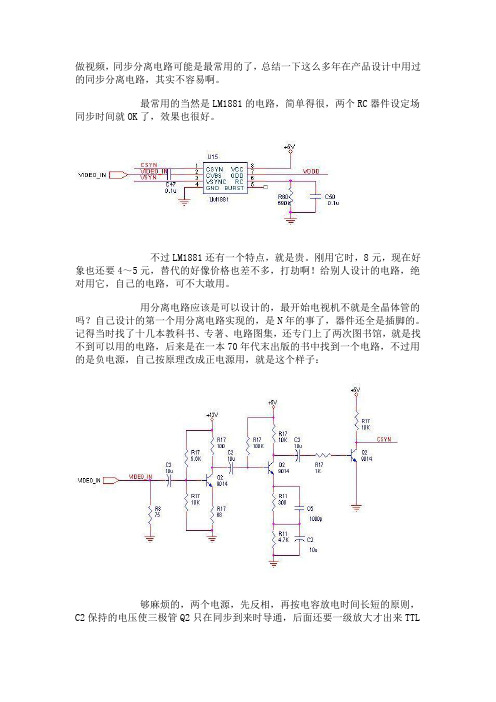
做视频,同步分离电路可能是最常用的了,总结一下这么多年在产品设计中用过的同步分离电路,其实不容易啊。
最常用的当然是LM1881的电路,简单得很,两个RC器件设定场同步时间就OK了,效果也很好。
不过LM1881还有一个特点,就是贵。
刚用它时,8元,现在好象也还要4~5元,替代的好像价格也差不多,打劫啊!给别人设计的电路,绝对用它,自己的电路,可不大敢用。
用分离电路应该是可以设计的,最开始电视机不就是全晶体管的吗?自己设计的第一个用分离电路实现的,是N年的事了,器件还全是插脚的。
记得当时找了十几本教科书、专著、电路图集,还专门上了两次图书馆,就是找不到可以用的电路,后来是在一本70年代末出版的书中找到一个电路,不过用的是负电源,自己按原理改成正电源用,就是这个样子:够麻烦的,两个电源,先反相,再按电容放电时间长短的原则,C2保持的电压使三极管Q2只在同步到来时导通,后面还要一级放大才出来TTL电平,不过工作得很好。
这个电路当时是用OrCAD SDT3.34画的,文件现在都转换不过来了,只能重新画一次。
再一次设计同步分离电路时已经进入了全面SMD的年代,再去找了一大堆书,这回还在期刊网上Down了不少论文,不过还是没有发现直接可以用的电路,又是一堆知识垃圾。
后来想到老的东芝两片机电视,TA7680/TA7698的原理介绍中,有类似的电路,拿过来变换一下,换N管为P管,做出了新的同步分离电路:这个电路简单多了,工作得也不错。
不过后来对它很不满意,一是电解电容C2、二极管D1体积太大,二是没有隔离,简单移到其他电路上用不放心。
再一次设计这个电路时,在这个电路的基础上摸来摸去,改成一个比较简单的电路:原理都相同,用比较大的电容两端积累的直流电压,分离相对直流电平点变化较大的同步头。
这个电路大胆用104电容代替电解电容,也工作得很好,体积大大减小了,不过后来发现负载变化较大时不够稳定,CSYN输出有杂波。
这里最需要调整的是偏置电阻R25。
摄像头信号传输与识别

◆◆◆◆◆有关摄像头组的材料◆◆◆◆◆图像采集与路径识别要实现一个完整的基于摄像头的智能小车,第一步要做的就是将摄像头输出的模拟信号通过DSP的A/D转换采集到DSP中,然后对采集到的原始图像数据进行处理,以获取赛道中央的黑线在图像坐标系中的位置。
接着,就要利用处理得到的图象信息对智能小车进行控制。
所以,可以说对于基于摄像头的智能小车,图像采集是至关重要的。
只有做好了图像采集,才谈得上“智能”,否则小车只能是个“瞎子”摄像头。
要做图像采集,那么首先要选择好摄像头。
摄像头分黑白和彩色两种,由于赛道是“白底黑线”,所以为达到寻线目的,只需提取画面的灰度信息,而不必提取其色彩信息,所以我们选择采用黑白摄像头。
较使用同等分辨率的彩色摄像头而言,这样可减少单片机采样的负担。
此外,摄像头根据成像原理,分为CCD和CMOS两种,CCD成像效果好,CMOS 更省电,可以根据自己队的侧重点进行选择。
摄像头的工作原理是:按一定的分辨率以隔行扫描的方式采集图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度一一对应的电压值,然后将此电压值通过视频信号端输出。
摄像头连续地扫描图像上的一行,则输出就是一段连续的电压信号,该电压信号的高低起伏反映了该行图像的灰度变化。
当扫描完一行,视频信号端就输出一个低于最低视频信号电压的电平(如0.3V),并保持一段时间。
这样相当于,紧接着每行图像信号之后会有一个电压“凹槽”,此“凹槽”叫做行同步脉冲,它是扫描换行的标志。
然后,跳过一行后(因为摄像头是隔行扫描的),开始扫描新的一行,如此下去,直到扫描完该场的视频信号,接着又会出现一段场消隐区。
该区中有若干个复合消隐脉冲,其中有个远宽于(即持续时间长于)其它的消隐脉冲,称为场同步脉冲,它是扫描换场的标志摄像头每秒扫描25 幅图像,每幅又分奇、偶两场,先奇场后偶场,故每秒扫描50 场图像。
奇场时只扫描图像中的奇数行,偶场时则只扫描偶数行。
CCD采样
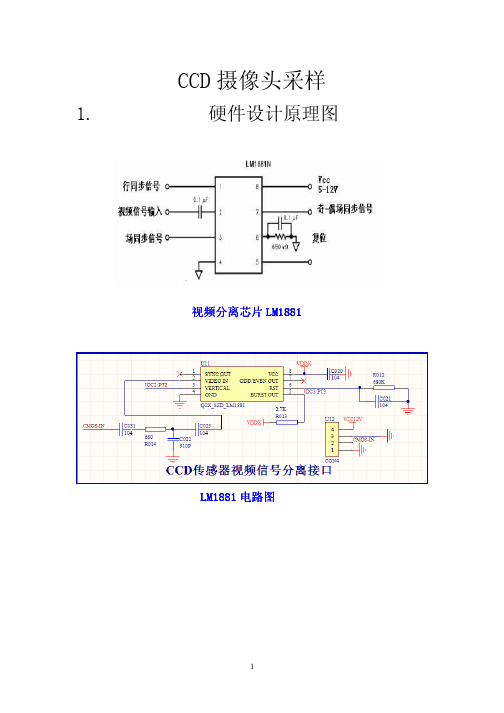
CCD摄像头采样 1.硬件设计原理图LM1881视频分离芯片LM1881电路图LM1881电路图整体整体电路图电路图电路图2.硬件设计说明书摄像头工作原理: 按一定的分辨率,以隔行扫描的方式采集图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像灰度转换成与灰度一一对应的电压值,然后将此电压值通过视频信号端输出。
具体而言,摄像头连续地扫描图像上的一行,则输出就是一段连续的电压信号,该电压信号的高低起伏反映了该行图像灰度变化。
当扫描完一行,视频信号端就输出一个低于最低视频信号电压的电平(如0.3V),并保持一段时间。
这样相当于,紧接着每行图像信号之后会有一个电压“凹槽”,此“凹槽”叫做行同步脉冲,它是扫描换行的标志。
然后,跳过一行后(摄像头是隔行扫描的),开始扫描新的一行,如此下去,直到扫描完该场的视频信号,接着会出现一段场消隐区。
该区中有若干个复合消隐脉冲,其中有个远宽于(即持续时间远长于)其它的消隐脉冲,称为场同步脉冲,它是扫描换场的标志。
场同步脉冲标志着新的一场的到来,不过,场消隐区恰好跨在上一场的结尾和下一场的开始部分,得等场消隐区过去,上一场的视频信号才真正到来。
摄像头每秒扫描25 幅图像,每幅又分奇、偶两场,先奇场后偶场,故每秒扫描50 场图像。
奇场时只扫描图像中的奇数行,偶场时则只扫描偶数行。
摄像头信号图摄像头信号图LM1881工作原理:LM1881信号时序图LM1881芯片能够将视频信号里的行同步脉冲、场同步脉冲以及奇偶场信号信息直接转化成TTL电平分别通过行同步信号、场同步信号以及奇偶场同步信号引脚输出,这些信号可以直接被单片机所利用,单片机可以通过这些信号来更准确地判断并采集信号摄像头的VO信号输入LM1881,然后行同步信号引脚与单片机的PT0引脚相连,此引脚为ECT通道0,设置为输入捕捉,捕捉下降沿,以此作为摄像头的换行标志;场同步信号与单片机的PT3引脚相连,此引脚为ECT通道3,设置为输入捕捉,捕捉下降沿,以此作为摄像头的换场标志。
视频同步分离芯片LM1881及其应用

文章编号:1009-671X (2004)09-0020-03视频同步分离芯片LM1881及其应用葛亚明,刘 涛,王宗义(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)摘 要:LM1881是针对电视信号的视频同步分离芯片,它可以直接对电视信号进行同步分离,准确地获得所需的视频图像信号,使用者可根据需要对该同步信号进行时序逻辑控制.LM1881广泛用于对视频信号的同步分离中,比如便携式图像采集卡、视频监控录像控制仪、基于成像系统的视频图像采集等.介绍了LM1881的主要特性,基本原理和引脚功能,给出了它的几种应用.关 键 词:LM1881;视频同步分离;视频信号中图分类号:TP211.5 文献标识码:A收稿日期:2003-08-19.作者简介:葛亚明(1976-),女,硕士研究生,主要研究方向:控制理论与控制工程.Video sync separator LM 1881and itsapplicationGE Y a 2ming ,LI U T ao ,WANG Z ong 2yi(School of Automation ,Harbin Engineering University ,Harbin 150001,China )Abstract :LM1881is a video sync separator which processes video signals ,and it can separate sync signal ers can carry out time sequence logical control with the sync signals by request.LM1881is used in the syn 2chronous separation of signals ,for exam ple ,portable picture gathering cards video controllers ,video picture gather 2ing ,etc.The main characters ,basic principles ,pin functions of LM1881and its application are introduced.K ey w ords :LM1881;video sync separator ;video signal 视频信号中除了包含图像信号之外,还包括了行同步信号、行消隐信号、场同步信号、场消隐信号以及槽脉冲信号、前均衡脉冲、后均衡脉冲等,因此,若要对视频信号进行采集,就必须准确地把握各种信号间的逻辑关系.LM1881就是针对视频信号的同步分离而生产的,它为视频信号的处理提供了极大的方便.LM1881可以从0.5~2V 的标准负极性NTSC 制、PA L 制、SEC AM 制视频信号中提取复合同步、场同步、奇偶场识别等信号,这些信号都是图像数字采集所需要的同步信号,有了它们,便可确定采集点在哪一场,哪一行.LM1881也能对非标准的视频信号进行同步分离,通过固定的时间延迟产生默认的输出作为场同步输出.1 LM1881芯片的主要特点LM1881主要特点如下:1)交流耦合的复合视频输入信号源;2)大于10kΩ的输入阻抗;3)小于10mA 的消耗电流;4)复合同步和垂直同步输出;5)奇偶场输出;6)色同步输出;7)水平扫描频率可达到150kH z ;8)边沿触发的场输出;9)对于非标准视频信号产生默认的场同步输出.图1 LM1881芯片引脚图第31卷第9期 应 用 科 技 Vol.31,№.92004年9月 Applied Science and T echnology Sep.20042 LM1881芯片的输出信号2.1 复合同步输出复合同步输出是对复合视频输入信号的箝位输出.LM1881芯片将视频信号同步顶箝位到直流1.5V,将比较器的阈值设在1.5V左右,这样便可使视频信号的图像波形部分被拉平,其他信号波形按原样复现.箝位线设在同步脉冲上,典型值为1.57mV左右.对于0.5V输入来说,箝位线大约为同步脉冲幅值的50%;而对于2V输入,箝位线大约为同步脉冲幅值的11%.2.2 奇偶场脉冲输出视频图像信号一帧画面分2场扫描,第1场先扫描奇数行1、3、5、…,称为奇数场;第2场扫描画面上的偶数行2、4、6、……,称为偶数场.奇数场开始的前一行为完整的1行,偶数场开始的前一行为1个半行,引脚7(如图1)输出的低电平表示为偶场,高电平表示为奇场.2.3 色度同步输出色度同步信号位于复合同步信号的行消隐脉冲的后肩,总共含有9~11个彩色副载波周期,占用的时间大约为2.25±0.23μs,时间滞后行同步前沿大约5.6μs.3 应 用随着科学技术的高速发展,图像数字化处理在军事、科研、工农业生产、医疗卫生等领域的应用越来越广泛.视频信号是图像数字化处理常用的信号.下面介绍几种不同领域视频信号的应用,其同步信号的分离都采用视频同步分离芯片LM1881.3.1 基于DSP的视频图像采集该系统的信号源是黑白电视信号(如图2),经LM1881分离出的视频同步信号作为FPG A的输入信号,FPG A根据这一系列同步信号进行逻辑设计来对A/D进行采样控制及信号预处理,DSP 控制整个系统图像数据的采集.双口RAM的采用实现了信号的实时采集与处理[1].3.1.1 视频图像采集视频图像采集采用的黑白电视信号(PA L制)说明如下:1)扫描方式为隔行扫描;2)每秒50场,场周期为20ms,每场312.5行,行周期为64μs;图2 基于DSP的成像系统的原理图 3)黑白电视信号由图像信号,复合消隐脉冲,复合同步脉冲组成.场消隐期宽度为25个行周期,场同步脉冲宽度为2.5个行周期,行消隐期宽度为12μs,行同步脉冲宽度为4.7μs;4)逐场采集电视信号,每场的图像大小为256×256,灰度值为256.3.1.2 同步信号的提取同步信号的提取采用视频同步分离芯片LM1881,分离出的行同步信号(HS)、场同步信号(VS)、奇偶场识别信号(ODE V)作为FPG A的输入信号,并控制A/D采样进程.3.1.3 A/D转换器的选择电视图像信号的带宽理论计算值为7.37MH z,实际取5.5275MH z.由香农定理知,A/ D的采样频率应该大于2倍的图像最高频率,所以A/D转换器采用TI公司的T LC5510芯片. T LC5510为8bit、20Msps的高速并行A/D转换器,单5V电源工作且只消耗100mW(典型值)的功率,内含采样保持电路和参考电压,并行输出口为三态口.3.1.4 FPG A采集控制逻辑部分的考虑一场视频图像有312.5行,场消隐期宽度为25个行周期,为使图像的采集行范围不落入场消隐期中,确定一场的采集从场同步滞后32个HS (行同步信号)脉冲开始,采集256行后停止,这样可保证不会采到消隐电平.图像每行时间为64μs,其中行消隐宽度为12μs,行消隐期中有4.7μs的行同步头,行同步头在消隐期中的位置一般靠前.确定从采集行行同步滞后7μs后开始采集(滞后时间可视具体信号稍加调整),采集时钟为5MH z,采256个点需要51.2μs.可以用一个8分频的计数器,将40MH z的输入时钟C LOCK变换为5MH z的采集时钟AD-C LK.・12・第9期 葛亚明,等:视频同步分离芯片LM1881及其应用3.2 便携式图像压缩卡的设计该系统采用T MS320VC5402数字信号处理器构成图像压缩卡(如图3),此压缩卡可直接挂在摄像机的视频输出端,在现场对图像信号进行采集、DCT 变换和Hu ffman 编码,并用RS 2485总线将压缩图像传送给上位机[2].LM1881分离出的复合同步信号、垂直同步信号和奇、偶场信号作为C5402的外部中断输入信号.当奇场同步脉冲信号到来时,C5402响应场中断,做好采集图像数据的准备,当行同步脉冲到来时,C5402响应行中断,连续采集一行图像数据.奇场图像数据采集完毕后再采集偶场的数据.图3 压缩卡框图该系统的同步分离电路由幅度分离和频率分离、脉冲调整组成.幅度分离有视频同步分离电路LM1881完成,视频信号由LM1881输入端进入,输出复合同步信号和场同步信号.频率分离和脉宽调整由不可重触发的双单稳态触发器74LS221完成.复合同步信号和场同步信号分别进入221的负脉冲触发端1A 和2A ,精确调整触发器的暂态时间,使得输出为负脉宽10.7μs 的行同步脉冲及1.5ms 的场同步脉冲.行、场同步脉冲的低电平持续整个行、场消隐期,以保证地址计数器和A/D 只工作在行、场正程,扫描期间对有效的图像信号采样及计数.3.3 视频监控录像控制仪的图像采集与处理视频监控录像控制仪主要应用于对静止场景的监控,如银行、宾馆、商场等场所,完成防盗、防火、警戒的报警及动态图像的自动记录(如图4).2个帧存器(静态存储器)A 和B 的设计,实现了图像的实时采集并将2帧图像进行快速比较.在单片机的控制下图像采集与处理单元将摄像机输入的视频信号采集一帧,与前一次采集的图像进行比较,并统计比较结果,根据统计结果判决是否启动报警与录像控制单元[3].3.3.1 预处理及A/D 转换预处理电路将来自摄像机的图像信号进行放大、对比与亮度调整、幅度箝位,送A/D 转换电路.A/D 转换由高速视频转换芯片C A3318CE 完成,本系统在视频信号行正程期间采样128点,故其采样频率选取2.5MH z.图4 采集与处理单元3.3.2 时序电路时序电路产生采集图像所需要的帧存扫描地址及A/D 转换控制信号,它主要实现2个电路:行内地址产生电路(点计数器)和行间地址产生电路(线计数器),这2个计数器的时钟均来自于与视频信号源同步的RC 振荡器,其震荡频率为5MH z ,计数器的输出频率为2.5MH z ,用作A/D 转换时钟及A/D 转换控制.2个计数器的预置值计算如下:设时钟周期为0.2μs ,行周期为64μs ,其中正程51.2μs ,逆程12.8μs ;逆程期的前肩1.6μs ,行同步宽度约为4.8μs.因而行正程期间按模256计数,逆程期间按模64计数,其中前肩期计数值为8,行同步脉冲期间不计数,预置值应为224.4 结束语本文介绍的视频同步分离芯片LM1881在视频信号处理领域有着广泛的应用,它对于理解和分析视频源提供了简捷途径,使用者可方便地对其分离出的同步信号进行所需要的逻辑时序控制,为进一步的设计奠定了基础.参考文献:[1]张晓飞,袁祥辉.基于DSP 成像系统的视频图像采集部分的实现[J ].压电与声光,2002,24(6):247-250.[2]梁 莹,严国萍.便携式图像存储卡的设计[J ].器件与电路,2000,11(3):86-87.[3]杨兆选,孙洪波.视频监控录像控制仪的研制[J ].电子技术应用,1996(9):41-43.[责任编辑:李雪莲]・22・应 用 科 技 第31卷。
视觉导引智能寻迹小车系统设计

毕业设计(论文)题目视觉导引智能寻迹小车系统设计如需要源代码或者其他资料可以联系我(1163776101@ OR m201570436@)姓名学号所在学院机械工程学院专业班级指导教师日期年月日智能车作为现代社会的新产物,以及它的安全、节能、环保、智能化和信息化越来越受到人们的关注,在智能车的基础上开发出来的产品已经成为自动化物流运输、柔性生产组织等系统的关键设备。
本设计是一种基于单片机控制的简易智能寻迹小车系统,对智能车自主行驶的决策以及算法也进行了相应的研究。
本论文主要从总体方案设计、硬件和软件设计。
硬件方面以Cortex-m3为控制核心,使用STM32F103RBT6单片机,辅助模块包括电源模块、驱动模块,图像采集模块以及为了调试方便而采用的辅助调试模块。
软件设计方面重点介绍了寻迹小车如何解决轨道检测和线路跟随问题。
单片机将CMOS摄像头对路面黑色轨迹进行检测的信号,通过一定的算法分析,通过调整PWM占空比控制小车左右两轮的速度以实现转向,从而使小车能够沿着黑色轨迹自动行驶,到达自动寻迹的目的。
关键字:智能车,图像处理,STM32As the new product of modern society, intelligent vehicle, and its safety, energy saving, environmental protection, intelligence and information technology, is paid more and more attention,The product has become the key equipment of the automation logistics transportation, the flexible production organization and so on. This design is a simple intelligent tracing car system based on microcontroller control, and the autonomous driving decision and algorithm of the intelligent vehicle are also studied.This paper mainly from the overall scheme design ,hardware and software design. Hardware to Cortex-M3 as the control core, use stm32F103RBT6 microcontroller, auxiliary module including power supply module, a driving module, image acquisition module and to facilitate the debugging and the auxiliary debug modul . The design of the software focuses on how to solve the track detection and line following problem. SCM CMOS camera on the road to detect the black trajectory of the signal, through a certain algorithm analysis.By adjusting the duty ratio of PWM to control the speed of the car around two wheels to achieve the steering, so that the car can automatically travel along the black track, reaching the purpose of automatic tracing.Keywords: smart car, image processing, stm32目录1 绪论......................................... 错误!未定义书签。
高速图像数据采集与处理系统的硬件设计
唐红雨陈迅随着科学技术的高速发展,图像数字化处理的应用领域也越来越广泛。
数据量大是图像数据的一大特点,数据传输速率高是其另一个特点,特别是对于一些转瞬即逝的图像信息,常规的软件不能及时处理,因此必须要采用硬件设备来加速图像处理过程。
DSP近些年来发展迅速,它具有一系列优点使得高速图像处理系统广泛采用DSP来实现。
本系统的核心器件为DSP和可编程器件CPLD:CPLD在系统中主要用于控制方面,而DSP主要用来进行图像数据的处理。
硬件部分是系统的一个重要部分,硬件电路中器件的选择以及器件的功能和特性,尤其是器件的速度、稳定性、功耗等直接影响着系统实时性的实现以及它的性能。
TMS320C5410芯片特点数字信号处理器是利用专门或通用的数字信号处理芯片以数字计算的方法对信号进行处理,具有处理速度快、精确、抗干扰能力强及可靠性高等优点,满足对信号实时处理及控制的要求。
本系统中采用的DSP芯片是美国德州仪器公司推出的定点数字信号处理芯片TMS320C5410,它具有改进的哈佛结构,丰富的指令集、较大的存贮空间和较快的运算速度,多流水线操作等优点,广泛用于图像处理、语音分析、通信工程等领域。
在DSP处理中,频率为40MHz的晶振接到C5410的X2/CLKIN引脚(X1空着不接),则C5410内部的机器周期约为25ns,当外部存储器的存取时间小于25ns时,C5410可进行零等待的存取。
C54x内部的相同步逻辑PLL(PhaseLockedLogic)兼有频率放大和信号提纯的功能,用高稳定的参考振荡器锁定,可以提供高稳定的频率源。
所以,C54x的外部频率源的频率可以比CPU的机器周期CLKOUT的速率低,这样就能降低因高速开关时钟所造成的高频噪声。
系统硬件设计如图1所示,DSP之前的硬件处理是一个视频图像的采集过程,图像数据具体处理的实现是在DSP中进行的。
视频图像信号经摄像头输入后,分两路进行视频预处理和信号放大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:1009-671X (2004)09-0020-03视频同步分离芯片LM1881及其应用葛亚明,刘 涛,王宗义(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)摘 要:LM1881是针对电视信号的视频同步分离芯片,它可以直接对电视信号进行同步分离,准确地获得所需的视频图像信号,使用者可根据需要对该同步信号进行时序逻辑控制.LM1881广泛用于对视频信号的同步分离中,比如便携式图像采集卡、视频监控录像控制仪、基于成像系统的视频图像采集等.介绍了LM1881的主要特性,基本原理和引脚功能,给出了它的几种应用.关 键 词:LM1881;视频同步分离;视频信号中图分类号:TP211.5 文献标识码:A收稿日期:2003-08-19.作者简介:葛亚明(1976-),女,硕士研究生,主要研究方向:控制理论与控制工程.Video sync separator LM 1881and itsapplicationGE Y a 2ming ,LI U T ao ,WANG Z ong 2yi(School of Automation ,Harbin Engineering University ,Harbin 150001,China )Abstract :LM1881is a video sync separator which processes video signals ,and it can separate sync signal ers can carry out time sequence logical control with the sync signals by request.LM1881is used in the syn 2chronous separation of signals ,for exam ple ,portable picture gathering cards video controllers ,video picture gather 2ing ,etc.The main characters ,basic principles ,pin functions of LM1881and its application are introduced.K ey w ords :LM1881;video sync separator ;video signal 视频信号中除了包含图像信号之外,还包括了行同步信号、行消隐信号、场同步信号、场消隐信号以及槽脉冲信号、前均衡脉冲、后均衡脉冲等,因此,若要对视频信号进行采集,就必须准确地把握各种信号间的逻辑关系.LM1881就是针对视频信号的同步分离而生产的,它为视频信号的处理提供了极大的方便.LM1881可以从0.5~2V 的标准负极性NTSC 制、PA L 制、SEC AM 制视频信号中提取复合同步、场同步、奇偶场识别等信号,这些信号都是图像数字采集所需要的同步信号,有了它们,便可确定采集点在哪一场,哪一行.LM1881也能对非标准的视频信号进行同步分离,通过固定的时间延迟产生默认的输出作为场同步输出.1 LM1881芯片的主要特点LM1881主要特点如下:1)交流耦合的复合视频输入信号源;2)大于10kΩ的输入阻抗;3)小于10mA 的消耗电流;4)复合同步和垂直同步输出;5)奇偶场输出;6)色同步输出;7)水平扫描频率可达到150kH z ;8)边沿触发的场输出;9)对于非标准视频信号产生默认的场同步输出.图1 LM1881芯片引脚图第31卷第9期 应 用 科 技 Vol.31,№.92004年9月 Applied Science and T echnology Sep.20042 LM1881芯片的输出信号2.1 复合同步输出复合同步输出是对复合视频输入信号的箝位输出.LM1881芯片将视频信号同步顶箝位到直流1.5V,将比较器的阈值设在1.5V左右,这样便可使视频信号的图像波形部分被拉平,其他信号波形按原样复现.箝位线设在同步脉冲上,典型值为1.57mV左右.对于0.5V输入来说,箝位线大约为同步脉冲幅值的50%;而对于2V输入,箝位线大约为同步脉冲幅值的11%.2.2 奇偶场脉冲输出视频图像信号一帧画面分2场扫描,第1场先扫描奇数行1、3、5、…,称为奇数场;第2场扫描画面上的偶数行2、4、6、……,称为偶数场.奇数场开始的前一行为完整的1行,偶数场开始的前一行为1个半行,引脚7(如图1)输出的低电平表示为偶场,高电平表示为奇场.2.3 色度同步输出色度同步信号位于复合同步信号的行消隐脉冲的后肩,总共含有9~11个彩色副载波周期,占用的时间大约为2.25±0.23μs,时间滞后行同步前沿大约5.6μs.3 应 用随着科学技术的高速发展,图像数字化处理在军事、科研、工农业生产、医疗卫生等领域的应用越来越广泛.视频信号是图像数字化处理常用的信号.下面介绍几种不同领域视频信号的应用,其同步信号的分离都采用视频同步分离芯片LM1881.3.1 基于DSP的视频图像采集该系统的信号源是黑白电视信号(如图2),经LM1881分离出的视频同步信号作为FPG A的输入信号,FPG A根据这一系列同步信号进行逻辑设计来对A/D进行采样控制及信号预处理,DSP 控制整个系统图像数据的采集.双口RAM的采用实现了信号的实时采集与处理[1].3.1.1 视频图像采集视频图像采集采用的黑白电视信号(PA L制)说明如下:1)扫描方式为隔行扫描;2)每秒50场,场周期为20ms,每场312.5行,行周期为64μs;图2 基于DSP的成像系统的原理图 3)黑白电视信号由图像信号,复合消隐脉冲,复合同步脉冲组成.场消隐期宽度为25个行周期,场同步脉冲宽度为2.5个行周期,行消隐期宽度为12μs,行同步脉冲宽度为4.7μs;4)逐场采集电视信号,每场的图像大小为256×256,灰度值为256.3.1.2 同步信号的提取同步信号的提取采用视频同步分离芯片LM1881,分离出的行同步信号(HS)、场同步信号(VS)、奇偶场识别信号(ODE V)作为FPG A的输入信号,并控制A/D采样进程.3.1.3 A/D转换器的选择电视图像信号的带宽理论计算值为7.37MH z,实际取5.5275MH z.由香农定理知,A/ D的采样频率应该大于2倍的图像最高频率,所以A/D转换器采用TI公司的T LC5510芯片. T LC5510为8bit、20Msps的高速并行A/D转换器,单5V电源工作且只消耗100mW(典型值)的功率,内含采样保持电路和参考电压,并行输出口为三态口.3.1.4 FPG A采集控制逻辑部分的考虑一场视频图像有312.5行,场消隐期宽度为25个行周期,为使图像的采集行范围不落入场消隐期中,确定一场的采集从场同步滞后32个HS (行同步信号)脉冲开始,采集256行后停止,这样可保证不会采到消隐电平.图像每行时间为64μs,其中行消隐宽度为12μs,行消隐期中有4.7μs的行同步头,行同步头在消隐期中的位置一般靠前.确定从采集行行同步滞后7μs后开始采集(滞后时间可视具体信号稍加调整),采集时钟为5MH z,采256个点需要51.2μs.可以用一个8分频的计数器,将40MH z的输入时钟C LOCK变换为5MH z的采集时钟AD-C LK.・12・第9期 葛亚明,等:视频同步分离芯片LM1881及其应用3.2 便携式图像压缩卡的设计该系统采用T MS320VC5402数字信号处理器构成图像压缩卡(如图3),此压缩卡可直接挂在摄像机的视频输出端,在现场对图像信号进行采集、DCT 变换和Hu ffman 编码,并用RS 2485总线将压缩图像传送给上位机[2].LM1881分离出的复合同步信号、垂直同步信号和奇、偶场信号作为C5402的外部中断输入信号.当奇场同步脉冲信号到来时,C5402响应场中断,做好采集图像数据的准备,当行同步脉冲到来时,C5402响应行中断,连续采集一行图像数据.奇场图像数据采集完毕后再采集偶场的数据.图3 压缩卡框图该系统的同步分离电路由幅度分离和频率分离、脉冲调整组成.幅度分离有视频同步分离电路LM1881完成,视频信号由LM1881输入端进入,输出复合同步信号和场同步信号.频率分离和脉宽调整由不可重触发的双单稳态触发器74LS221完成.复合同步信号和场同步信号分别进入221的负脉冲触发端1A 和2A ,精确调整触发器的暂态时间,使得输出为负脉宽10.7μs 的行同步脉冲及1.5ms 的场同步脉冲.行、场同步脉冲的低电平持续整个行、场消隐期,以保证地址计数器和A/D 只工作在行、场正程,扫描期间对有效的图像信号采样及计数.3.3 视频监控录像控制仪的图像采集与处理视频监控录像控制仪主要应用于对静止场景的监控,如银行、宾馆、商场等场所,完成防盗、防火、警戒的报警及动态图像的自动记录(如图4).2个帧存器(静态存储器)A 和B 的设计,实现了图像的实时采集并将2帧图像进行快速比较.在单片机的控制下图像采集与处理单元将摄像机输入的视频信号采集一帧,与前一次采集的图像进行比较,并统计比较结果,根据统计结果判决是否启动报警与录像控制单元[3].3.3.1 预处理及A/D 转换预处理电路将来自摄像机的图像信号进行放大、对比与亮度调整、幅度箝位,送A/D 转换电路.A/D 转换由高速视频转换芯片C A3318CE 完成,本系统在视频信号行正程期间采样128点,故其采样频率选取2.5MH z.图4 采集与处理单元3.3.2 时序电路时序电路产生采集图像所需要的帧存扫描地址及A/D 转换控制信号,它主要实现2个电路:行内地址产生电路(点计数器)和行间地址产生电路(线计数器),这2个计数器的时钟均来自于与视频信号源同步的RC 振荡器,其震荡频率为5MH z ,计数器的输出频率为2.5MH z ,用作A/D 转换时钟及A/D 转换控制.2个计数器的预置值计算如下:设时钟周期为0.2μs ,行周期为64μs ,其中正程51.2μs ,逆程12.8μs ;逆程期的前肩1.6μs ,行同步宽度约为4.8μs.因而行正程期间按模256计数,逆程期间按模64计数,其中前肩期计数值为8,行同步脉冲期间不计数,预置值应为224.4 结束语本文介绍的视频同步分离芯片LM1881在视频信号处理领域有着广泛的应用,它对于理解和分析视频源提供了简捷途径,使用者可方便地对其分离出的同步信号进行所需要的逻辑时序控制,为进一步的设计奠定了基础.参考文献:[1]张晓飞,袁祥辉.基于DSP 成像系统的视频图像采集部分的实现[J ].压电与声光,2002,24(6):247-250.[2]梁 莹,严国萍.便携式图像存储卡的设计[J ].器件与电路,2000,11(3):86-87.[3]杨兆选,孙洪波.视频监控录像控制仪的研制[J ].电子技术应用,1996(9):41-43.[责任编辑:李雪莲]・22・应 用 科 技 第31卷。