实验五 GPS信号捕获的FPGA实现
GPS P码接收机本地信号发生器的FPGA实现

I mp l emen t a t i o n o f L o c al G PS P Co de Gen e r a t i on
t h e me c h a ni s m a n d s t r u c t u r e o f P Co d e g e n e r a t i o n, we d e s i gn e d s o me a l go r i t h m o f P c o d e a n d r e a l i z e i t
a n d c o m pl e x s t r u c t u r e . Th e s o t wa f r e r e c e i v e r b a s e d o n P c o d e i s n o t on l y o f h i g h p o s i t i o n p r e c i s i o n, b u t
Ab s t r a c t : As t h e mi l i t a r y u s e o f GPS, P c o d e i a c t e r i s t i c o f h i g h p r e c i s e, l o ng p e r i o d
GP S P码 接 收 机 本 地 信 号 发 生 器 的 F P G A 实 现
曹 进 ,李 荣冰 ,徐 昭 , 谢 非
( 南京航空航天大学 导航研究中心 , 江苏 南京 2 1 0 0 1 6 )
摘 要 : P码 作 为 G P S军 用 伪 码 , 具 有结 构 复 杂 、 周期长且码速率快的特点 , 这 使 得 使 用 P码 的软 件 接 收 机 不 仅 定 位 精度高 , 且 具 有 很 强 的抗 干 扰 和 反 欺 骗 能 力 。能 够 实 现 任 意 卫 星 的 任 意 时 刻 P码 的产 生 , 对 于 实 现 P码 直 接 捕 获 和
GPS的FPGA实现

GPS数据的解析与显示 (Verilog HDL)
Time_ram
LCD1602
gps_data[7..0] GPS_TXD
UART接收 Latitude_ram
data_ready
Longitude_ram
解析GPRMC并将所需信息放到memory中
解析GPRMC信息并显示
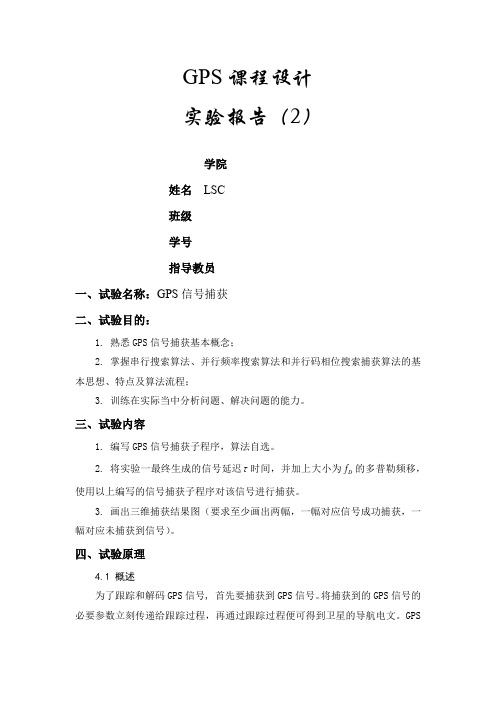
FPGA 实现数据解析并在LCD1602上显示框图
数据处理显示模块
注:复位时在S0状态,信息有效时,S6状态存储 时间信息,S7状态存储纬度信息,S8状态存储经 度信息。每个状态在RxD_ready 信号有效时读取 RxD.
“$GPRMC”检测、时间、经纬度信息存储状态机
RxD !=’E RxD =’G’
S1
S8
S2
RxD =’$’ RxD !=’G’ RxD =’P’ RxD !=’$’ RxD =’E RxD !=’P’
3、项目程序
一般有两种方式:
• 1、用altera软件接口
• • • • • • • • • • • • • • • • • • • • • int set_baudrate(alt_u32 brate) { IOWR_ALTERA_AVALON_UART_DIVISOR(UART_BASE,(unsigned int)(CPU_FRE/brate+0.5)); return 0; } //串口接收中断服务程序 void uart_ISR(void* context,alt_u32 id) { temp=IORD_ALTERA_AVALON_UART_RXDATA(UART_BASE); raw_buf[receive_count++]=temp; } int uart_init(void) { //设置波特率为9600 set_baudrate(baudrate); IOWR_ALTERA_AVALON_UART_CONTROL(UART_BASE, 0x80);//接收中断使能 IOWR_ALTERA_AVALON_UART_STATUS(UART_BASE, 0x00);//清状态标志 IOWR_ALTERA_AVALON_UART_RXDATA(UART_BASE, 0x00);//清接收寄存器 alt_irq_register(UART_IRQ,NULL,uart_ISR); turn 0; }
基于FPGA的微弱GPS信号捕获跟踪模块设计开题报告
基于FPGA的微弱GPS信号捕获跟踪模块设计开题报告一、选题背景及意义GPS(全球定位系统)是目前世界上最先进的卫星导航定位系统,广泛应用于航空、航海、汽车导航、物流等领域,便捷高效。
GPS信号在传播过程中势必会受到复杂环境、建筑物阻挡、干扰信号等因素的影响,使得GPS接收信号强度低下,导致GPS位置信号的精度不尽如人意。
因此,如何提升GPS信号捕获和跟踪的精度是目前研究的热点之一。
FPGA(现场可编程逻辑门阵列)是一种半导体器件,具有灵活可编程的特性,可在现场对硬件进行重新配置,满足不同的应用需求。
在GPS信号处理方面,FPGA具有时钟频率高、可实现硬件并行处理以及功耗低等特点,特别适合用于GPS信号的加工处理。
本文旨在设计一种基于FPGA的微弱GPS信号捕获跟踪模块,提升GPS定位精度,为GPS技术在各行各业的普及应用提供技术支持。
二、选题依据及设计思路本文主要依据以下几个方面的考虑,来设计基于FPGA的微弱GPS信号捕获跟踪模块。
2.1 GPS信号特点GPS信号是一种低功率、低信噪比、高精度的信号,其特点在于接收机接受到的信号强度非常微弱,同时还存在多路径效应等现象,对信号处理的精度和实时性提出了较高的要求。
2.2 FPGA技术优势FPGA集成了大量的逻辑门电路和存储器单元,同时又具有高度并行处理的能力,能够以硬件设计直接面向应用,其时钟频率和计算能力非常高,在信号处理领域具有独特的技术优势。
2.3 设计思路通过FPGA设计,将传感器采样的GPS信号经过滤波、数据处理等步骤,去除噪音,提取出有效信息,实现GPS信号的捕获和跟踪,并通过外部接口输出GPS定位信息。
三、研究内容与主要贡献本文将从以下几个方面展开研究:3.1 采集GPS信号的硬件设计设计一个基于FPGA的GPS信号采集和处理模块,包含GPS天线、前置放大器、滤波器等模块,实现对GPS信号的有效捕获和前期处理。
3.2 GPS信号的滤波与处理针对GPS信号的特点,对信号进行滤波、放大、采样等处理,提取出有效信息,并通过校验码、载波同步等技术实现GPS信号的跟踪和定位。
GPS L2频率P(Y)码跟踪及FPGA实现

中图分类号 :T N 8 5 0 . 4
文献标识码 :A
文章 编号 :1 0 0 3 — 3 1 1 4 ( 2 0 1 4 ) 0 3 — 6 5 — 3
GP S L 2 P( Y)T r a c k i n g a n d F P GA I mp l e me n t a t i o n
工程 实践及 应 用技术
G P S L 2 Байду номын сангаас率 P ( Y ) 码跟踪及 F P G A实现
连
摘
洁. 伍蔡伦
( 河 北省 卫 星导航技 术与 装备 工程技 术研 究 中心 , 河 北 石 家庄 0 5 0 0 8 1 )
要 :P( Y) 码 的 稳 定跟 踪是 G P S双 频 高精 度 接 收 机 中 必 不 可 少 的 一 项 功 能 , 也是 接 收 机 中的 主要 关键 技 术 。
L I AN J i e. WU C a i — l u n ( S a t e l l i t e N a v i g a t i o n T e c h n o l o g y a n d E q u i p m e n t E n g i n e e r i n g T e c h n o l o g y R e s e a r c h C e n t e r o f H e b e i P r o v i n c e , S h i j i a z h u a n g H e b e i 0 5 0 0 8 1 , C h i n a ) Ab s t r a c t : T h e s t a b l e t r a c k i n g o f P ( Y)c o d e i s a c r u c i a l f u n c t i o n a n d k e y t e c h n o l o g y o f h i g h — p r e c i s i o n p o s i t i o n i n g d u a l — f r e q u e n c y G P S r e c e i v e r . S i n c e P( Y)i s p a r t l y u n k n o w n a n d h a s l o w c a r r i e r — t o — n o i s e r a t i o , a n d t h e c a r r i e r t r a c k i n g o f L 2 P( Y)c o d e s i s d i f f i c u l t t o i m p l e m e n t . I n o r d e r t o i m p l e m e n t P( Y) c o d e t r a c k i n g o f h i g h — p r e c i s i o n r e c e i v e r , b y u s i n g t h e s e m i - c o d e l e s s t r a c k i n g t e c h n o l o g y ( Z - t r a c k i n g )a n d t h e p r i n c i p l e o f c r o s s — m n h i p l y i n g , t h i s p a p e r u s e s W— c o d e s i g n s e t f r o m s h o r t i n t e g r a l q u a n t i t y o f L 1 b r a n c h a n d s h o t r
基于GPS中频信号源的FPGA设计实现方案

基于GPS中频信号源的FPGA设计实现方案1.引言在GPS接收机的设计中,为了检验和完善值号处理篁法,需要在本地获得GPS数字中频信号数据。
采用真实的数据并不是最佳选择,主要是因为其中的许多信号属性无法控制,也无法摸拟不同的接收环境和干扰情况,这给算法的验证测试带来麻烦;而且存储GPS真实数据需要消耗大量的硬件资源。
解决这一问题的有效方法是设计一个能够产生GPS数字中频信号并且参数可控的仿真信号源。
通常的仿真信号源设计方式被割裂为两种一一纯硬件方式和纯软件方式。
纯硬件方式是利用硬件器件和硬件表述直接进行设计,其设计难度大、周期长,而且系统结构设计的改变会带来巨大的硬件设计工作量。
纯软件设计的仿真信号源,是利用软件语言在PC机上搭建整个系统,其产生的数据需要被缓存起来以供硬件测试。
这样做不仅浪费存储资源,而且难以满足实时性要求。
本文介绍了一种新的GPS中频信号源的例由设计方案,它是利用Xi1inXSystemGeneratorfor幽工具可以自动由系统级表述转换成FPGA硬件表述的特点,完成从软件图形化设计到FPGA硬件实现的一体化流程。
其优点在于,功能设计部分在MAT1AB/SIMU1INK下完成,信号源产生结构清晰,进行信号验证检测和参数更改;硬件实现时,通过XiIinXSystemGenerator工具,自动生成优化的硬件描述语言文件和硬件测试文件,辅以Xi1inX硬件开发平台,大大减少了直接的硬件设计工作量,缩短了从设计到实现的过程,也方便了对系统设计的修改和升级。
2.Xi1inxSystemGeneratorforDSPXi1inxSystemGenerator是Xi1inx公司开发的FPGA辅助设计工具,包括嵌入SimUIink的Xi1inX模块集合(B1ockSet)和模型到硬件的转换软件。
它可自动生成FPGA综合、仿真和实现工具所需的命令文件。
用户可以在图形化环境中完成系统模型的硬件开发。
GPS信号捕获
GPS课程设计实验报告(2)学院姓名LSC班级学号指导教员一、试验名称:GPS信号捕获二、试验目的:1. 熟悉GPS信号捕获基本概念;2. 掌握串行搜索算法、并行频率搜索算法和并行码相位搜索捕获算法的基本思想、特点及算法流程;3. 训练在实际当中分析问题、解决问题的能力。
三、试验内容1. 编写GPS信号捕获子程序,算法自选。
f的多普勒频移,2. 将实验一最终生成的信号延迟 时间,并加上大小为D使用以上编写的信号捕获子程序对该信号进行捕获。
3. 画出三维捕获结果图(要求至少画出两幅,一幅对应信号成功捕获,一幅对应未捕获到信号)。
四、试验原理4.1 概述为了跟踪和解码GPS信号, 首先要捕获到GPS信号。
将捕获到的GPS信号的必要参数立刻传递给跟踪过程,再通过跟踪过程便可得到卫星的导航电文。
GPS卫星处于高速运动中,因此,其频率会产生多普勒频移。
为覆盖高速卫星预期中的所有多普勒频率范围,捕获方法覆盖的频率范围必须在±10 kHz之内。
针对某个特定的卫星信号,捕获过程就是要找到C/A码的起始点,并利用找到的起始点展开C/A码频谱,一旦复现了C/A码的频谱,输出信号将变成连续波(Continuous Wave,CW),于是便得到其载波频率。
也就是说,捕获过程就是要获得输入信号的C/A码的起始点和载波频率,然后传递给跟踪过程。
4.2 卫星信号捕获的考虑4.2.1 捕获时的最大电文长度C/A码长1 ms,那么至少要用1ms的电文来捕获,甚至只用1 ms的电文来捕获时,都可能发生导航电文相位偏移。
因此,为了保证捕获电文中不含有数据偏移,需要用两组连续的电文来捕获,这个电文最大长度是10 ms。
如果使用两组连续的10 ms电文来捕获,就保证了在某一组电文中不含相位偏移。
限制电文长度的第二个因素是C/A码的多普勒效应。
4.2.2 捕获中的频率步长捕获时的另一个考虑因素是捕获中剥离载波所需的频率。
步进频率的大小与捕获中的电文长度紧密相关。
基于FPGA的GPS信号快速捕获方法实现

基于FPGA的GPS信号快速捕获方法实现3刘亿民,宋学瑞(中南大学信息科学与工程学院,湖南长沙410083) 摘 要:介绍了一种基于平均相关器的GPS信号快速捕获算法,通过V HDL语言描述在FPG A上实现了该算法。
平均相关器是一种将输入的5000点GPS样本信号平均化为1024点样本,然后通过FFT方法实现GPS信号快速捕获的基带相关器。
这种相关器可以一步搜索到所有可能的码相位偏移,大大提高了捕获速度,比较好地满足了实时处理的要求。
关键字:GPS;FPG A;捕获;采样平均中图分类号:P228 文献标识码:A 文献标识码:100829268(2006)06200422051 引 言捕获卫星信号的时间是评价GPS接收机的主要性能指标,一种实现快速捕获的方法是使用基于快速傅立叶变换的相关器,这种方法可以一步搜索到所有可能的码移,从而加快捕获速度[1]。
C/A码周期为1ms,如果中频采样频率为5MHz,即每1ms 有5000个样本,进行5000点的FFT相关函数计算将导致计算量巨大、设计复杂、接收机成本增高等问题[2]。
如果能在不降低信号信噪比的情况下,将每毫秒5000点的中频采样数据下采样到每毫秒1024点,就可解决上述问题。
通过1024点的FFT模块进行频域软件信号处理是硬件实现C/A码捕获的主要思想[3]。
2 GPS信号捕获GPS接收机在接收GPS卫星信号时,先将L波段的载频下变频至中频信号,再进行解扩、解调等处理。
在解扩解调之前,GPS接收机必须搜索载波频率偏移和C/A码码移,即进行C/A码捕获,然后进行卫星信号的跟踪和锁定[4]。
当在GPS接收机中采用基于FFT的快速码并行相关检测技术时,相应的自相关函数可以用下式来表示:R[m]=6L n=0x[n]・CA[(n+m)]=x[n] CA[-n]=f-1(f x[n])・ f3(CA[n]))式中,R[m]表示得到的自相关序列;x[n]表示输入的采样数据;CA[n]表示本地C/A码;L为C/A码的长度,m为本地码的码移数, 表示卷积;f表示傅立叶变换;f3(CA[n])表示本地C/A码序列傅立叶变换的共轭;f-1表示反傅立叶变换。
基于FPGA的GPS信号频域捕获算法设计及其实现
基于FPGA的GPS信号频域捕获算法设计及其实现陈雷;孟维晓【摘要】GPS信号捕获是GPS接收机的关键技术,针对常用的GPS接收机中采用的串行滑动相关捕获技术速度慢的缺点,设计了基于FPGA的频域快速捕获算法.与传统的时域相关捕获算法相比,采用FFT技术的频域捕获算法可以快速捕获到多普勒频移及C/A码相位延时.同时使用了系统级建模工具System Generator设计快速捕获算法的FPGA硬件方案,并采用时分复用的方式使每次相关运算共用一个FFF核,节省了大量的硬件资源.【期刊名称】《应用科技》【年(卷),期】2011(038)005【总页数】5页(P22-26)【关键词】GPS;多普勒频移;FFT;频域捕获;System Generator【作者】陈雷;孟维晓【作者单位】哈尔滨工业大学通信技术研究所,黑龙江哈尔滨150001;哈尔滨工业大学通信技术研究所,黑龙江哈尔滨150001【正文语种】中文【中图分类】TN96在GPS接收机中,本地产生的载波和扩频码需要与接收信号中的载波和扩频码进行同步[1].这种同步一般分为捕获(粗同步)和跟踪(精同步)2个阶段.捕获过程就是估计接收到的信号的多普勒频移和伪码相位,并用这些估计的参数去初始化跟踪环路.目前常用的GPS信号捕获方法是滑动相关法.滑动相关法是对时域和频域采取串行搜索,此策略使用较为普遍,但是捕获时间很长.针对上述滑动相关法的缺点,文中设计了一种基于FFT的频域快速捕获算法,大大提高了捕获速度.并且采用时分复用技术,使算法在实现时只采用一个FFT核,节约了硬件资源.1 GPS信号捕获的数学原理从GPS接收机射频前端输出的经过正交解调后的中频信号可以表示为式中:A为信号幅度;d(k)为k次采样时刻的导航数据;c(k)为k次采样时刻的C/A码数据;fIF为下变频之后的中频频率;TS为信号的采样周期,其对应的采样频率为FfIF(满足奈奎斯特采样定律);θ为相位误差;w(k)为噪声.为了简化理论推导过程,此处忽略了多径干扰以及电离层延时等其他因素的影响.而本地信号的数学模型为式中:Clocal(k)为本地C/A码数据;flocal为本地中频数据并且有fIF=flocal+ΔF,ΔF即为接收信号中频与本地信号中频的多普勒频移.GPS信号的捕获过程就是接收信号与本地信号进行相关运算并得到最大峰值处的多普勒频移以及码相位延时的过程.相关运算的数学原理可以看出相关运算与卷积运算很相似.若利用式(3)直接计算相关值,就是传统的时域滑动相关运算.将接收信号y(k)和本地信号x(k)带入式(3)中有从式(4)知相关值R(n)不仅与导航数据d(k)以及C/A码数据c(k)以及clocal(n+k)有关,还与接收信号中频fIF和本地信号中频flocal之差有关,即与多普勒频移ΔF有关.为了讨论多普勒频移与相关峰值的关系,下面进行4条假设.1)接收信号与本地信号在n=0时,产生最大相关值;2)在相关运算时间内导航数据d(k)没有变化,且值为1;3)C/A码采用双极性码表示,即+1表示1,-1表示0;由于此时接收信号与本地信号对齐,则有c(k)clocal(k)=1.4)噪声w(k)很低忽略不计,并且相位误差θ=0.将fIF=flocal+ΔF带入式(4)中,则有最大相关值式中:A为常数,FS为采样频率,N为进行相关运算的长度.由此可见,相关运算的最大相关峰是与多普勒频移有关的,当多普勒频移ΔF=0时,相关峰将有最大值,此时的C/A码相位延时与载波多普勒频偏即为捕获的结果.图1给出了多普勒频移与相关峰的关系曲线.图1 多普勒频移与相关峰的关系曲线2 基于FFT的频域捕获算法基于FFT的频域搜索算法[2-3]本质是根据时域的卷积等价于频域的相乘这一数学原理.传统的2个抽样序列之间的关系是按如式(3)所示,其中R(n)作为延迟n 的函数,是x(k)和y(k)之间的函数.但是如果直接计算相关值R(n),其运算量非常大,正比于序列长度的平方.若通过频域来计算,运算量将大幅度减少,运算时间变短.其数学原理如下:式中:表示卷积,IFFT代表傅里叶反变换,FFT*代表傅里叶变换的共轭,FFT(y(k))为接收信号的频谱,FFT(x(k))为本地伪码的频谱.基于FFT的频域捕获算法的具体过程[4]如下.1)中频信号采样后经数字下变频,交给FFT模块.其中I、Q2支路分别作为实部和虚部,进行复数FFT运算.2)对本地产生的扩频码进行FFT运算,并取其复共轭.3)把接收信号和本地信号的FFT结果相乘,然后进行IFFT运算,再取模.4)对结果进行捕获判决,如果高于门限值,进行一次捕获检验,确定是真的捕获后交与后面跟踪支路.图2是这种算法的仿真结果,仿真设定接收信号的等效中频为1.25 MHz,采样速率是5 MHz,多普勒频移为+1 kHz,信噪比SNR=-19 dB,接收信号C/A码相位为2 000,卫星星号PRN=4.图2 频域捕获算法的仿真结果从图2中可看出此种算法的到了很好的相关峰.最终捕获的码相位为2 000个采样时间,捕获的多普勒频槽是1.251 MHz,与输入的中频数据相吻合.从上面的仿真结果可以看出,基于FFT的快速捕获算法能够成功地捕获到GPS信号的码相位以及多普勒频移,说明这种算法可以有效地捕获GPS信号.由于FFT算法的使用,使得相比于时域的搜索算法,运算量大幅下降.采用FFT算法在频域计算`1 023个相关函数值所需的乘法运算次数缩减为在时域运算的1.57%,所需要的加法运算次数缩减为在时域运算的2.94%.可见该算法节省了大量运算量.所以基于FFT的频域捕获算法大大缩短了捕获时间,是一种名副其实的快速捕获算法.3 频域捕获算法的FPGA实现利用系统级建模工具System Generator[5-6],在Xilinx公司XC4VFX60FF1 148这款FPGA上实现了基于FFT的频域快速捕获算法.本设计方案的中频采样频率为4.096 MHz,本地中频为 1.25 MHz,多普勒频槽宽度为500 Hz.图3为本设计方案的原理框图.图3 频域捕获算法原理图4 频域捕获算法的硬件电路图3的基本原理如下:首先,经过正交解调后的I路和Q路中频信号经过预处理后分别作为实部与虚部进行FFT运算;其次,本地产生的余弦载波与正弦载波分别乘上本地C/A码,作为实部与虚部进行FFT运算,并将结果取共轭;然后,两次FFT 运算结果进行复数乘法后进行IFFT运算,得到相关值并对结果取模;最后进行捕获判决,若捕获成功则输出码相位与载波多普勒,若失败则改变卫星号或多普勒频槽重新开始捕获.本设计方案中并没有直接将本地载波乘以中频信号以完成去载波功能,而是将本地载波乘在了C/A码上,通过两次FFT运算结果的复数乘法运算达到去载波的目的.这是本设计方案的独到之处.当进行常规信号捕获时,去除载波方法与传统方法效果一致;但是当进行弱信号捕获时,由于要对接收的中频信号进行累积以提高信噪比,若采用传统的去载波方法,每次改变频槽都要重新对中频信号进行累加,但是采用此种方法只需要累加一次即可,这样节约了大量时间.图4为最终使用System Generator设计的频域捕获算法的硬件电路.整个硬件电路分为预处理模块、FFT/IFFT模块、扫频模块、本地C/A码产生模块、复数运算模块、FFT结果存储模块、捕获判决模块等7个主要模块以及一些状态控制模块. 下面依次介绍一下各个模块的主要组成及功能.预处理模块主要完成数据位扩展功能,这是因为常用的GPS射频芯片如SE4120、SE4150等输出的中频数据都是2比特量化,而本设计方案采用的FFT/IFFT核的输入为8 bit,所以中频数据要经过预处理模块扩展为8 bit,然后输入到FFT/IFFT核.FFT/IFFT模块的核心部分是Xilinx公司的4 096点FFT Core,由于硬件实现上FFT与IFFT的本质是相同的,本设计方案只使用了一个FFT核,在一次相关运算中通过时分复用的方式分3次调用此FFT核,节省了大量硬件资源.而扫频模块的主要部分是Xilinx的DDS Core,根据不同的频槽对应的频率控制字来控制本地中频信号的产生.本地C/A码产生模块则会根据输入的卫星号产生此卫星对应的C/A码.FFT结果存储模块由2块4 096点的Ram构成,主要是为了存储FFT模块运算时的中间结果.捕获判决模块采用的方法是门限判别法,当相关运算的结果大于门限时认为捕获成功,否则认为捕获失败.这里要详细介绍一下复数乘法模块传统的复数乘法为可以看出,进行一次复数乘法需要3个加法器和4个乘法器.但是对式(9)稍加修改有经过稍微的改动复数乘法可以利用5个加法器和3个乘法器来实现.虽然加法器多了2个,而乘法器少了1个,但是在实际的硬件电路实现时,乘法器所耗费的硬件资源是加法器无法比拟的.经过此处改动又节省了一定的硬件资源.本设计方案所消耗的硬件资源如表1所示.并且经过ISE综合后得到了图5所示的RTL级电路图. 表1 硬件资源消耗情况Logic Utilization Used AvailableUtilization/%Number of Slices 5 295 25 280 20 Number of Slice Flip Flops 6 171 50 560 12 Number of 4 input LUTs 6 462 50 560 12 Number of bonded IOBs 91 576 15 Number of FIFO16 36 232 15 Number of GCLKs 1 32 3 Number of DSP48s 44 128 34图5 综合后的RTL级电路最后对此硬件设计方案进行了验证.待捕获的接收信号中频为 1.251 MHz,即多普勒频偏为+1 kHz,SNR= -19 dB,卫星编号为4,码相位偏移为2 000个采样周期.进行软硬件协同仿真得到的验证结果如图6所示,其中横轴代表采样点数,纵轴代表相关值.从图中可以看出在SNR=-19 dB的条件下,得到了很好的相关峰.硬件平台最终捕获到的载波频率为1.251 MHz,码相位偏移为2 000个采样周期,捕获结果与测试用的接收信号参数一致,说明基于FFT的频域快速捕获算法在硬件平台上是可实现的,并且有着很好的捕获性能.图6 经FPGA测试得到的捕获结果4 结束语分析了多普勒频移会对信号捕获运算的相关峰值产生影响.针对传统的时域捕获算法运算量大等缺点,采用一种基于FFT的频域捕获算法,减少了运算量,提高了GPS中频信号的捕获速度.并利用System Generator及其先进的系统级建模思想,在Xilinx公司XC4VFX60FF1148这款FPGA上实现且验证了频域快速捕获算法.同时,所研究的内容也为北斗等其他卫星导航定位系统的信号捕获方案提供了参考. 参考文献:[1]KAPLAN E D,HEGARTY C J.Understanding GPS:principles and applications[M].2nd ed.Boston:Artech House,2006,11-13.[2]董绪荣,唐斌,蒋德.卫星导航接收软件机原理与设计[M].北京:国防工业出版社,2008:128-133.[3]龚国辉,李思昆.FFT与循环卷积相结合的GPS信号C/A码相位测量算法[J].通信学报,2005,26(7):76-81.[4]TSUI J B Y.Global positioning system receivers:a software approach [M].2nd ed.[S.l].John Wiley & Sons Inc,2005:129-140.[5]纪志成,高春能.FPGA数字信号处理设计教程:System Generator入门与提高[M].西安:西安电子科技大学出版社,2008:31-36.[6]田耘,胡彬.Xilinx ISE Design Suite 10.x FPGA开发指南:DSP、嵌入式与高速传输篇[M].北京:人民邮电出版社,2008:40-47.。
基于fpga与gps的时间测量电路设计与实现
基于fpga与gps的时间测量电路设计与实现摘要:本文基于FPGA与GPS的时间测量电路设计与实现,旨在探究一种精确测量时间的方法。
本文通过对FPGA与GPS原理、时间同步及电路设计理论的研究,设计了一种精度高、可靠性强、使用方便的时间测量电路,能够精确测量时间并输出测量结果。
实验结果表明,该电路的精度达到了微秒级别,满足了实际应用中对时间测量的高要求。
关键词:FPGA、GPS、时间测量、同步、电路设计1.引言时间作为一种基本物理量,广泛应用于各种领域。
在很多应用中,需要对时间进行高精度的测量,如卫星通信、导航、物联网等。
为了满足这种需求,各种时间测量技术层出不穷,其中基于FPGA与GPS的时间测量电路由于精度高、可靠性强、使用方便等优点而受到广泛关注。
2.FPGA与GPS原理2.1 FPGA原理FPGA即现场可编程门阵列(Field Programmable Gate Array),是一种集成电路芯片。
与传统的固定电路不同,FPGA可以根据需求重新编程,实现不同的功能。
FPGA通常由可编程逻辑单元、输入输出单元、时钟管理单元、存储单元等组成,可以完成复杂的控制和处理任务。
2.2 GPS原理GPS即全球卫星定位系统(Global Positioning System),是一种通过卫星进行位置、速度和时间的测量和测算的系统。
GPS系统由多颗卫星、地面控制站和用户终端设备组成,通过接收卫星信号并测量信号的传播时间,可以计算出用户的位置和时间。
3.时间同步在时间测量中,时间同步是至关重要的步骤。
时间同步包括信号同步和数据同步。
3.1 信号同步信号同步是指将接收到的GPS信号与本地时钟进行同步,以保证测量结果的准确性。
在信号同步中,GPS信号的时钟信息被提取出来,并与本地时钟进行同步。
3.2 数据同步数据同步是指将接收到的GPS数据与本地电路进行同步,以保证数据传输的准确性。
数据同步通常通过数据抽取、分时复用、流式传输等方法实现。
GPS信号CA码跟踪的FPGA实现的开题报告

GPS信号CA码跟踪的FPGA实现的开题报告一、选题背景随着车载导航、手机定位等应用的普及,全球定位系统(GPS)已成为人们生活中不可或缺的一部分。
GPS中有两种主要的信号:P码和CA 码。
其中,CA码是一种双频信号,其精度较低,适用于授权的民用应用。
在GPS接收机中,需要进行CA码跟踪,以确定接收到的定位信号。
二、研究内容本文旨在探究基于现场可编程门阵列(FPGA)的GPS信号CA码跟踪实现方法。
具体研究内容如下:1. GPS信号CA码的特点和原理分析;2. FPGA的基础原理和应用特点;3. FPGA实现GPS信号CA码跟踪的算法设计和优化;4. FPGA实现GPS信号CA码跟踪的硬件实现。
三、研究意义本研究将为GPS信号CA码跟踪的FPGA实现提供一种新的思路和方法,为GPS接收机的研发提供参考依据。
同时,对于FPGA的应用技术的研究也有较大的意义。
四、研究方法本文将采用如下研究方法:1. 阅读相关文献,了解CA码跟踪的基本原理和算法;2. 熟悉FPGA的基础原理和应用特点;3. 设计和优化CA码跟踪算法;4. 利用FPGA进行硬件实现,并进行测试和验证。
五、预期成果和进度安排本研究预期达到的成果如下:1. CA码跟踪算法设计和优化;2. 基于FPGA的GPS信号CA码跟踪硬件实现;3. 实验数据分析和总结。
预计完成时间为3个月,大致进度安排如下:1. 第一周至第二周:熟悉GPS信号CA码的特点和原理,了解FPGA 的基础知识;2. 第三周至第四周:进行CA码跟踪算法的设计和优化;3. 第五周至第七周:进行基于FPGA的硬件实现,并进行测试;4. 第八周至第九周:对实验数据进行分析,总结研究成果;5. 第十周至第十二周:完成开题报告和论文撰写。
六、研究难点和风险评估本研究的主要难点在于CA码跟踪算法的设计和优化,以及基于FPGA的硬件实现。
在硬件实现过程中,可能会遇到FPGA资源不足、信号干扰等问题。
基于FPGA的GPS中频信号跟踪相关器设计与实现

Si n lTr c n s d o g a a ki g Ba e n FPG A
Zh n n W a gQig P nS u u a gKa n n a h g o
( c o l f n tu n c n ea dE gn eig o te s Unv ri , nig 2 0 9 ) S h o sr me t i c n n ie r ,S uh a t i s y Na j 1 0 6 o I S e n e t n
并 行处理 多通 道 数 据 导致 运 算 速 度 慢 的 问题 。相
导航 电文 , 解算 定位结 果 。 目前 , 内 G S市 场 上 国 P 大部 分产 品都依赖 进 口 , 内产 品绝 大部 分也 依赖 国
国外 ASC芯片进行 开发生 产 。因此 , G S核心 I 对 P
关 器 的输 出结 果 , 可 以 为微 处 理 器 , 可 为全 数 既 也 字检 相器 和环路 滤波器 提供用 于跟 踪 的必要 参数 。
c d -a r utp ir n e r t - u e e i n d,a d smu a i n i c r id o t o ec r y m li l ,i tg a ed mp ri d s e e s g n i lt s a r u .Th e u ts o h tt e c r elt rc n o e e r s l h ws t a h o r l o a a d mo u a e t e s n l n e e t i o s a k r u d Th o r l t r c n o e a e wi c o r c s o o h v a a p o e d lt h i a d rc ran n ie b c g o n . g u e e r el o a p r t t a mir p o e s r t a e d t r — a h c s e a al l .Th p r t g s e d i e h n e . e s dp rl l ey e o e a i p e s n a c d n
GPS接收机基带信号处理与FPGA实现的开题报告
GPS接收机基带信号处理与FPGA实现的开题报告一、选题背景随着全球卫星定位系统(GPS)技术的快速发展,GPS接收机在军事、航空、航海、导航等领域的应用越来越广泛。
在GPS接收机中,基带信号处理系统是实现GPS信号检测和解调的关键部分之一,对GPS接收机的性能和功耗有着重要的影响。
目前,GPS接收机基带信号处理系统通常采用数字信号处理器(DSP)或现场可编程逻辑门阵列(FPGA)实现。
相比于DSP,FPGA具有更高的灵活性和并行处理能力,能够实现更复杂的算法和信号处理任务。
本课题旨在研究GPS接收机基带信号处理系统的FPGA实现方法,重点研究GPS信号的数字化、接收机的通道化、码跟踪、相位跟踪等关键技术,实现一个高性能、低功耗的GPS接收机基带处理系统。
二、研究内容本课题主要研究以下内容:1. GPS信号数字化技术的研究与实现。
采用数字信号处理技术对GPS信号进行采样、量化和滤波,实现对GPS信号的数字化处理。
2. GPS接收机通道化技术的研究与实现。
设计和实现GPS接收机的前端通道化模块,包括载频和载波同步、频率偏移校正、信号增益控制等功能。
3. GPS码跟踪技术的研究与实现。
采用数码滤波器和相关器等技术实现GPS码跟踪,提高接收机对GPS信号的解调灵敏度和精度。
4. GPS相位跟踪技术的研究与实现。
采用数字锁相环(PLL)等技术实现GPS相位跟踪,提高接收机对GPS信号的相位捕获和跟踪能力。
5. FPGA实现方法的研究与实现。
探索采用FPGA实现GPS接收机基带信号处理系统的方法和技术,优化系统性能和功耗。
三、研究意义本课题研究的GPS接收机基带信号处理系统的FPGA实现方法,具有以下意义:1. 增强我国在GPS领域的技术实力。
通过自主研发高性能、低功耗的GPS接收机基带处理系统,提高我国在卫星导航领域的技术实力和国际竞争力。
2. 推动GPS技术在民用领域的应用。
研究并实现高性能、低功耗的GPS接收机基带处理系统,将有助于推动GPS技术在民用领域的广泛应用,如智能交通、物流配送等领域。
基于FPGA的高动态GPS信号实时捕获设计

基于FPGA的高动态GPS信号实时捕获设计胡铁乔;孟田田【摘要】A realization scheme of hardware receiver system using for the fast acquiring of high dynamic GPS signal is proposed.According to the acquiring speed requirements of the GPS receiver and the hardware platform,this scheme chooses 2sets of average samples among 5sets after the averaging sampling technique processing.It realizes the real-time acquiring of the single satellite GPS signals in cost of small accuracy decline.The simulation results and the hardware implementation results of the high dynamic GPS signal show the validity and the feasibility of the method.%提出了一种高动态环境下GPS接收机实时捕获的FPGA硬件实现方案.此方案针对高动态环境下GPS接收机对信号捕获速度的要求和当前硬件平台,在平均采样预处理后,选取5组数据中的2组进行捕获,以捕获精度的较小降低为代价实现单颗GPS卫星信号的实时捕获.通过对高动态环境下模拟信号捕获过程的仿真和硬件实现,验证了此种捕获方法的正确性和可行性.【期刊名称】《中国民航大学学报》【年(卷),期】2013(031)004【总页数】5页(P27-31)【关键词】实时捕获;高动态;GPS接收机;FPGA【作者】胡铁乔;孟田田【作者单位】中国民航大学电子信息与工程学院,天津300300;中国民航大学电子信息与工程学院,天津300300【正文语种】中文【中图分类】TN911.7全球定位系统(global positioning system,GPS)可以为用户提供三维位置、速度和时间基准[1]。
GPS信号捕获原理

二、GPS 信号的捕获2.1 GPS 信号模型GPS 的射频信号L1频段是1575.42MHz, 对其进行下变频到中频后,以s f 为采样率得到的采样信号可以表示如下:()()()()(){}()2,0,01,,,,cos 2sat N k sat sat k sat dsat sat k sat dsat nk sat IF dsat k sat k k sat r t A d t f C t f f f t t n t ττθθππα==+++++∑ 其粗略的中频信号模型可以如下表示:()()()[]t T t C T t D P S dopp IF d d r ϖϖ+--=cos 2 2.2 GPS 信号的捕获2.2.1信号捕获原理信号捕获的目的是使本地产生的复制C/A 码与接收到的调制在载波上的C/A 码同步,以实现相关解扩与码相位精确跟踪。
GPS 天线所接收到的 GPS 信号淹没在热噪声中,不易于捕获和跟踪。
GPS 信号的捕获利用 C/A 码的强自相关特性,在对应不同码相位偏移、不同多普勒偏移的相关值中找出相关峰值,从而确定卫星信号的存在及其码相位偏移和载波频率(包括载波多普勒频移)的信息。
当接收机产生的码相位和载波频率必须与接收到的码相位和载波频率相匹配,使得相关值高于信号检测阈值,完成伪码捕获和载波频率捕获,进而对信号进行跟踪。
根据导航卫星信号的特点,其信号的捕获常采用二维的搜索方式。
在二维搜索法中,信号的捕获基于时域(伪码相位)和频域(多普勒频移)的二维空间进行(见图1)。
图1 GPS信号捕获中的二维搜索2.2.2信号搜索方法2.2.2.1步进相关法本地码生成器以C/A码标称频率(6Hz)产生C/A码与接收1.02310到的采样信号相关累加,一个积分周期(通常1个码周期)后,相关峰与检测门限比较,如果相关峰大于门限,则认为捕获成功,得到对应的码相位估计;如果相关峰小于门限,码发生器自动将本地码码相位向前或向后跳动1/2或1/4个码片,然后继续相关累加检测,最多在2L或4L个伪码周期后找到与本地伪码同步的输入伪码的相位状态(L即为一个码周期内码片的数目),以实现伪码的捕获。
GPS信号并行捕获算法的FPGA实现
GPS信号并行捕获算法的FPGA实现
卢洁莹;马路
【期刊名称】《电子设计工程》
【年(卷),期】2016(024)007
【摘要】为了实现对GPS信号的快逮捕获,通过分析和比较了几种现有算法,提出了基于平均采样的FFT并行捕获算法.为了避免平均采样跨越伪码的跳变沿而带来能量损失,采用了寻找伪码最大游程的方法,在最大游程里重新进行平均采样,使其多出一个码片的样点,通过仿真验证了该算法既避免了平均能量的损失,又便于硬件实现.为了便于硬件实现,设计了捕获算法的系统结构和各个子模块的FPGA结构;通过功能仿真,分析验证了算法的可行性.
【总页数】5页(P79-82,86)
【作者】卢洁莹;马路
【作者单位】华南理工大学广东广州510641;中国科学院空间科学与应用研究中心北京100190
【正文语种】中文
【中图分类】TN911.72
【相关文献】
1.基于FPGA的GPS信号频域捕获算法设计及其实现 [J], 陈雷;孟维晓
2.时频二维并行捕获算法的FPGA实现 [J], 曹硕;焦国太
3.GPS信号并行捕获算法的改进与实现 [J], 韩美林
4.GPS信号快速捕获算法及FPGA实现流程设计 [J], 陈志勇
5.基于交错方向乘子法的并行GPS信号捕获算法 [J], 杨峰; 周飞; 潘丽丽; 林静然因版权原因,仅展示原文概要,查看原文内容请购买。
GPS软件接收机捕获算法的FPGA仿真

GPS软件接收机捕获算法的FPGA仿真陈熙源;汤新华;祝雪芬【期刊名称】《东南大学学报:自然科学版》【年(卷),期】2009(0)S2【摘要】探讨了GPS软件接收机的前端采集数据结构、C/A码捕获算法原理、Virtex2p开发板原理.为了能在FPGA(可编程门阵列)上实现GPS信号并行捕获算法,采用了补零计算来弥补算法中采样点不基于2N的不足,并且在Simulink环境下运用基于FPGA的应用软件SystemGenerator进行了补零后的并行捕获算法的FFT模块、虚数乘法模块、平方模块等搭建编程.同时采用了Matlab中的M文件将采样数据仿真成模拟信号导入完成仿真实验,并将仿真结果与Matlab结果进行了相应的比较和分析,得到与Matlab结果同样的捕获频率.虽由于补零引起小于1个码元(16个采样点)的采样点误差,但不影响捕获结果,证实了System Generator 在FPGA实现捕获算法可行性.【总页数】5页(P26-30)【关键词】GPS接收机;捕获算法;FPGA;System;Generator【作者】陈熙源;汤新华;祝雪芬【作者单位】东南大学微惯性仪表与先进导航技术教育部重点实验室;东南大学仪器科学与工程学院【正文语种】中文【中图分类】P228.4【相关文献】1.基于GP2000的GPS软件接收机设计及捕获算法实现 [J], 付世勇;王惠南;刘海颖2.GPS软件接收机的捕获算法的信号级仿真 [J], 王淑君;易翔;罗洋3.一种基于GPS软件接收机的优化捕获算法 [J], 崔绍龙;姚相振;方金云4.GPS软件接收机捕获跟踪算法研究与仿真 [J], 徐敏;翟传润;战兴群;张炎华5.软件GPS接收机信号搜索捕获的仿真实验研究 [J], 张勇;林宝军;徐志瀚因版权原因,仅展示原文概要,查看原文内容请购买。
基于FPGA的GPS信息采集与显示系统设计与实现
基于FPGA的GPS信息采集与显示系统设计与实现刘玉民;张雨虹;姚明林【期刊名称】《唐山学院学报》【年(卷),期】2011(024)006【摘要】The paper proposes a new approach for the acquisition and display of GPS information based on K8051 MCU IP core embedded in FPGA,introduces the system hardware composition, explains the design procedures of Quartus Ⅱ logic diagram file and assembler desing program in detail and finally makes a hardware experiment using GPS module, FPGA experiment board and LCD. Experiment results proves its effectiveness.%提出了一种基于FPGA技术的K8051单片机IP核采集与显示GPS信息的新方法。
介绍了系统的硬件组成,详细说明了QuartusⅡ原理图文件的设计方法和汇编程序设计流程图,并利用GPS模块、FPGA实验开发板和液晶显示器进行了硬件实验,结果证明了该方法的有效性。
【总页数】4页(P17-20)【作者】刘玉民;张雨虹;姚明林【作者单位】唐山学院教务处,河北唐山063000;唐山学院计算机中心,河北唐山063000;唐山学院信息工程系,河北唐山063000【正文语种】中文【中图分类】TP39;P228.4【相关文献】1.基于FPGA原型的GPS基带验证系统设计与实现 [J], 冯华星;何文涛;李晓江2.基于FPGA的VGA波形显示系统设计与实现 [J], 郑争兵3.基于FPGA的图形点阵液晶显示系统设计与实现 [J], 郑争兵4.基于GPS的铁路货车定位信息采集系统设计与实现 [J], 吴建军5.基于FPGA的LCD动态显示控制系统设计与实现 [J], 李璐;余英因版权原因,仅展示原文概要,查看原文内容请购买。
基于FPGA的GPS芯片验证与实现研究的开题报告
基于FPGA的GPS芯片验证与实现研究的开题报告一、研究背景GPS(Global Positioning System)是一种卫星导航系统,能够提供全球定位和时间服务。
GPS技术在很多领域得到了广泛应用,如交通、军事、测绘等等。
其应用领域的不断拓展,对GPS精度的要求也越来越高。
目前市面上已经有不少GPS芯片,但是它们的精度不太理想,往往需要额外的硬件和算法来达到更高的精度。
基于FPGA的GPS芯片验证与实现,可以针对GPS卫星信号的处理特点进行优化,提高GPS的精度,并且还可以充分利用FPGA的高速运算优势,对GPS芯片进行实时验证和实现。
二、研究目的和意义本文旨在通过对GPS卫星信号的处理特点进行分析和优化,开发一种基于FPGA的高精度GPS芯片,并对其进行实时验证和实现。
具体目的和意义如下:1. 对GPS卫星信号的处理特点进行分析和优化,提高GPS的精度。
2. 开发一种基于FPGA平台的GPS芯片,并且充分利用FPGA的高速运算优势,实现高效的GPS定位。
3. 对开发的GPS芯片进行实时验证,并且与市面上的GPS芯片进行性能比较。
4. 为GPS技术的发展提供新的思路和技术支持。
三、研究内容和方法1. GPS卫星信号的处理特点分析与优化通过对GPS卫星信号的处理特点进行分析和优化,针对GPS信噪比低和多径效应等问题,采用不同的算法进行处理和优化。
2. 基于FPGA平台的GPS芯片开发开发一种基于FPGA平台的高精度GPS芯片,调用FPGA的高速运算功能,优化算法,提高定位精度。
3. GPS芯片实时验证将开发的GPS芯片放到真实环境中,与市面上的GPS芯片进行性能比较,评估GPS芯片设计的精度和实用性。
4. 结果分析根据实验结果,分析开发的GPS芯片的优缺点,并提出改进措施。
研究方法主要包括文献调研、算法设计、FPGA芯片开发、实验验证等。
四、进度安排1. 理论研究阶段(1-2周)对GPS卫星信号的处理特点进行分析和优化,综合选取相关的算法和技术手段。
GPS接收机捕获跟踪算法研究及FPGA设计的开题报告

GPS接收机捕获跟踪算法研究及FPGA设计的开题报告一、研究背景及意义全球定位系统(GPS)是一种基于卫星技术的导航系统,可以提供全球范围内的定位、导航和定时服务。
GPS接收机是用于接收和处理GPS信号的设备,广泛应用于车辆导航、航空导航、船舶导航等领域。
在GPS接收机中,捕获跟踪算法是最基本的模块之一,它负责从卫星发射的无线电信号中捕获GPS信号,并跟踪该信号以进行导航。
因此,捕获跟踪算法的准确性和效率直接影响GPS接收机的性能和精度。
同时,随着FPGA技术的发展,越来越多的GPS接收机开始使用FPGA作为硬件加速器来实现信号处理算法。
因此,开发一种基于FPGA的高效捕获跟踪算法,对于提高GPS接收机的性能和精度具有重要的意义。
二、研究内容本文将重点研究GPS接收机中的捕获跟踪算法,并设计一个基于FPGA的硬件加速器来实现该算法。
具体研究内容包括:1. GPS信号的捕获过程研究。
深入分析GPS信号的特点和捕获过程的基本原理,探究各种捕获算法的优缺点。
2. 基于FPGA的捕获跟踪算法设计。
使用Verilog HDL编写捕获跟踪算法的硬件描述语言,实现该算法在FPGA上的硬件加速。
3. 硬件加速器的性能优化。
基于FPGA硬件平台的特点,优化捕获跟踪算法的硬件结构和算法实现,提高硬件加速器计算速度和准确度。
4. 系统集成和优化。
将捕获跟踪算法和其他GPS接收机模块集成在一起,实现完整的GPS接收机系统,并对整个系统进行调试和优化。
三、预期结果及意义通过本研究,将实现以下预期结果:1. 设计一种高效的GPS信号捕获跟踪算法,并将其实现在FPGA硬件加速器上。
2. 通过硬件加速器的实现,提高GPS接收机的准确性和性能,提高导航精度。
3. 为GPS接收机的发展提供一种新的、基于FPGA的硬件加速器设计方法,为其他领域的硬件实现提供参考。
通过以上研究成果,本文的研究具有重要的理论和实际意义,对于推动GPS技术的发展和推广具有积极的作用和贡献。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS信号捕获的FPGA实现
电子科学技术研究院
电子科技大学
实验任务安排
1.讲授(2学时) 2.学生实验(4学时)
电子科技大学
实验器材
FPGA开发板一块、FPGA仿真器 PC电脑一台、导航信号源、示波器等
电子科技大学
实验目的和要求
理解GPS信号捕获的基本原理 能够利用Verilog语言实现捕获算法并在电路 中验证
电子科技大学
实验原理
一、概述 二、数控振荡器NCO源自三、下变频器四、扣钟单元
电子科技大学
一、概述
由于串行捕获电路每个相关周期只能判别一个相位点是否 同步,在需要快速捕获的场合就很不适合了。而并行捕获 虽然可以在一次积分时间后同时判别多个相位点,大大缩 短同步捕获的时间,但是需要耗费大量的硬件资源。所以 我们采用一种串并结合的方式,在捕获时间和资源上做一 个最合理的折中。我们将整个PN码序列的相位(即PN码的 周期长度L)分成N段,分割后每一个子PN码序列区域的相 位点个数为M=L/N,每次搜索M个相位点,N即为需要搜 索的次数。
实验结果分析
实验结果判定,以输出正确的原始电文为准 在深入理解捕获原理的基础上,分析实验结 果
电子科技大学
The End
电子科技大学
输入 输入
信号描述
系统时钟 捕获启动信号,高电平有 效,必须在此捕获时间段 内 给 出 Acq_ind 信 号 , 否 则,则认为捕获失败 捕获PN码输入
Pn_in
输入
Acq_ind
Ph_phase deduct_en
输出
输出 输出
捕获完成指示,高电平 有效
表示1ms的码片偏移数 扣钟标志,高电平有效, 高电平的长度即为扣掉 的码片数。 电子科技大学
电子科技大学
二、 捕获策略及流程
捕获工作流程如下: 1)DSP向捕获电路写入捕获开始命令,捕获电路开 始捕获; 2)FPGA收到捕获开始命名后,开始捕获。首先, 进行并行相关运算,当到达积分时间后,将128个 相关值一次存入RAM中,此时FPGA开始进行下一 次的并行相关运算; 3)FPGA分别进行求模运算,得到64个值,并和上 次求模运算得到的值进行累加平滑;
电子科技大学
二、 捕获策略及流程
为了提高检测概率,我们对求模后的结果在 时域再进行非相干累加。尽管非相干累加不 能改善信号的信噪比,却可以在时域对噪声 进行平滑,使得相关峰更加稳定突出,从而 达到有效提高检测概率的目的。
电子科技大学
捕获模块与跟踪模块的接口设计
信号名称
Clk dc_start
方向
电子科技大学
一、相位搜索控制
deduct_en的低电平宽度由又一个计数器来控制,这个计数 器是个减法计数器,需要扣钟时,首先向计数器置入初始 值(即需要扣钟的个数),deduct_en信号变为低电平,计数 器开始计数,计数器计到0时deduct_en信号拉高,一次扣 钟结束。 deduct_clk为扣钟后的PN码码钟。
由于我们的基带信号处理是按照非相干解扩来设计的,当 捕获电路尚未精确的捕获到PN码时,跟踪环路还不能正常 的工作。当PN码进入精确跟踪后,送来的精确的PN码进入 环路的解扩单元完成其扩频码片数据的解扩功能,其结构 图如下:
电子科技大学
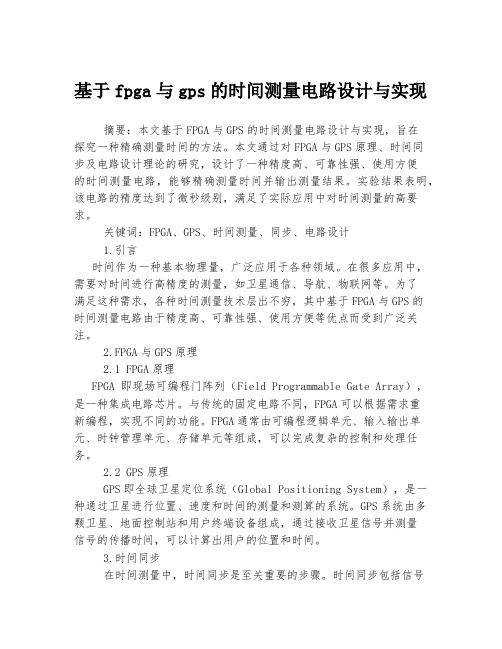
五、扣钟单元
Clk_pn from DLL
CLK
沿检测 电路
记数初值
电子科技大学
二、 捕获策略及流程
4)当完成60次累加平滑后,表示搜索完犯个码片, 则指示相位搜索控制模块进行扣钟处理,扣除32 个码钟。扣钟完成后重复步骤2、3进行新的32个 码片搜索; 5)每次扣钟时,将本轮扣钟得到的最大值与上一轮 扣钟的最大值比较,保存最大值及其对应的索引 。当扣钟次数达到32次时,表明已搜索完整个PN 码周期; 6)将最终的最大值和设定的门限做比较。若小于门 限,则宣布捕获失败,退出捕获流程;若大于或等 于门限,则把码相位扣钟到索引指示的位置,宣 布捕获成功,退出捕获流程,进入对卫星信号的 跟踪环节。
电子科技大学
二、数控振荡器NCO
DDS的基本构成如图1所示,由相位累加器、相位寄存器和 正余弦查找表三部分组成。在全局时钟sys_clk的控制下, 相位累加器对频率字不断累加,输出为无初相的数字相位 。进入相位累加部分,与初相位字进行相加,得到当前相 位。之后进入正余弦查找表,输出当前相位对应的正弦值 和余弦值。
电子科技大学
二、数控振荡器NCO
DDS的基本构成如下图:
电子科技大学
三、下变频器
在基带信号处理中,下变频器主要完成接收到的PN码片数 据流和本地的NCO所产生的cos( 2 f )同相信号和sin(2 f )正交 信号进行乘法运算的功能。其实现框图如下图:
n n
电子科技大学
四、解扩单元
电子科技大学
实验内容
一、相位搜索控制 二、捕获策略及流程
电子科技大学
实验内容
混合并行快速捕获方法的工程实现主要由以下几 个模块构成:C/A码产生器、码NCO模块、相位 搜索控制模块等,前两个模块已在实验一和实验 二中完成,下面主要针对第三个模块进行设计。
电子科技大学
实验内容
捕获电路如下图所示:
电子科技大学
二、 捕获策略及流程
综合考虑捕获时间和FPGA的资源占用情况,设计 中考虑采用64路相关器同时并行进行相关处理。 一由于有I、Q两个支路,所以一共需要128个相关 器。为了防止漏警率过大,每个相关器之间的PN 码相位间隔设计为1/2个码片。由于GPS的PN码长 度为 1023个码片,所以要搜索完整个码序列,需 要搜重复索32次。在搜索完成后,DSP将得到的最 大值与门限值进行比较。如果小于门限,就认为 信号中没有该波束的信号,宣布捕获失败;如果大 于门限,根据最大值相应的索引,将本地PN码序 列调整到准确的位置,并宣布捕获成功,进入跟 踪环节。
电子科技大学
一、相位搜索控制
相位搜索控制模块的作用是在每个子PN码区域相关完成后 ,将本地码相位偏移一定的码片数,继续进行下一个子PN 码区域的相关。要实现码相位的偏移,最直接的方法就是 截断码产生器的时钟(扣钟),使得本地码产生器停止工作 ,从而改变了PN码序列的相位。所以这个模块主要是产生 一个低电平有效的deduct_en信号,它通过一个与门屏蔽码 产生器的时钟pn_clk输入,可以控制deduct_en的低电平的 宽度来控制码延迟的码片数。
电子科技大学
一、概述
捕获电路由本地时钟产生器、数控振荡器NCO、本地C/A码 产生器、下变频器、解扩单元和积分清零器、扣钟单元等 模块组成,下面对部分模块简单介绍:
电子科技大学
二、数控振荡器NCO
NCO(Numerieally Controlled Oscillator,数控振荡器)的功能 是产生理想的同频率且频率可变的正弦波和余弦波信号, 这两路数字信号正交。NCO是扩频通信中很重要的组成部 分,它产生的两路信号输入数字下变频器,用于对载波调 制或解调。这里主要用于对己调信号的解调,使其输出零 中频的基带信号。使用数字直接频率合成(DDS)的方法实 现,DDS具有频率转换时间快、频率分辨率高、相位噪声 低以及在频率捷变时相位连续等优点。
上升沿
16bit递减 计数器
clk_pn_plus
lock
电子科技大学
五、扣钟单元
图中,CLK是系统时钟,clk_pn是DLL环路的NCO输出,根 据捕获模块得到的本地PN码与卫星PN码偏移的码片数,这 样。当捕获标志lock为‘1’,即捕获时,计数器开始记数 ,就会产生一个宽度为偏移码相位的脉冲,这个脉冲反向 后与clk_pn的上升沿时钟相与,这样,就可以就扣掉相应的 PN码时钟周期数,由此实现扣钟目的,从而达到本地PN码 与卫星PN码同步。Clk_pn_plus输出将用于PN码产生,位同 步信号产生等功能模块中。