3.4小车测速
用打点计时器测量小车的速度实验报告
用打点计时器测量小车的速度实验报告示例文章篇一:《用打点计时器测量小车的速度实验报告》嘿,同学们!今天我要跟你们讲讲我做的那个超有趣的用打点计时器测量小车速度的实验,那可真是让我大开眼界啊!实验前,老师把我们分成了几个小组。
我和我的小伙伴们围在实验桌旁,眼睛都盯着那些实验器材,心里充满了好奇和期待。
“这能测出小车的速度?”我心里直犯嘀咕。
老师先给我们讲解了打点计时器的原理和使用方法。
我听着听着,感觉有点晕乎,这可比数学课上的难题还让人头疼呢!不过,我可不能退缩,我暗暗给自己打气:“怕什么,别人能搞懂,我也能!”终于,轮到我们自己动手啦!我们小心地把小车放在轨道上,把打点计时器固定好,连接上电源。
我紧张得手都有点发抖,“这要是弄不好可咋办呀?”“准备,开始!”随着小组同学的一声令下,我推动小车,那打点计时器就“哒哒哒”地响起来,纸带上留下了一串密密麻麻的点。
“哎呀,这都是些啥呀?”我看着纸带,一脸懵。
小伙伴们也都凑过来,七嘴八舌地讨论起来。
“这是不是表示小车的运动轨迹啊?”“我看不像,应该是速度的记录。
”我们对照着老师讲的方法,开始测量点与点之间的距离。
这可真是个细致活,眼睛都快看花了。
“哎呀,我眼睛都酸了,还没量完呢!”我忍不住抱怨道。
好不容易量完了,开始计算速度。
这计算也不简单啊,一会儿用这个公式,一会儿用那个公式。
“这公式咋这么复杂呀,头都大了!”我抓着头发,都快抓狂了。
经过一番努力,我们终于算出了小车在不同位置的速度。
“哇,原来小车的速度是这样变化的呀!”我们兴奋地叫起来。
通过这次实验,我明白了做实验可不能马虎,要认真仔细,不然得出的结果就不准确啦。
而且,团队合作也特别重要,大家一起讨论、一起努力,才能完成实验。
这就是我的实验经历,你们觉得有趣吗?反正我是觉得又累又有趣,还学到了好多知识呢!我觉得这样的实验以后要多做,才能让我们更好地理解那些抽象的知识!示例文章篇二:《用打点计时器测量小车的速度实验报告》嘿,小伙伴们!今天我要跟你们讲讲我们在学校做的那个超有趣的实验——用打点计时器测量小车的速度!实验开始前,老师把我们分成了几个小组。
车速测量方法
车速测量方法一、概述车速测量是指在行驶过程中,测量车辆的速度。
车速测量方法有多种,包括机械式、电子式、光学式等。
本文将介绍几种常见的车速测量方法及其原理。
二、机械式车速测量方法1. 车轮直径法原理:根据车轮直径和转数计算出车辆的速度。
步骤:(1)确定车轮直径。
(2)使用计数器或转子来记录每个轮子的转数。
(3)根据公式:车速=2×π×轮子半径×转数÷时间,计算出车辆的速度。
2. 里程表法原理:根据里程表上显示的里程和时间来计算出车辆的平均速度。
步骤:(1)安装一个能够记录行驶距离和时间的里程表。
(2)根据公式:车速=行驶距离÷行驶时间,计算出车辆的平均速度。
三、电子式车速测量方法1. GPS定位法原理:利用GPS卫星定位系统来确定汽车位置,并通过比较两个位置之间所需的时间来计算汽车的平均速度。
步骤:(1)安装一个GPS接收器。
(2)使用GPS接收器记录车辆的位置和时间。
(3)根据公式:车速=两个位置之间的距离÷两个位置之间所需的时间,计算出车辆的平均速度。
2. 车载测速仪法原理:车载测速仪是一种电子设备,能够通过轮速传感器或其他传感器来测量车辆的速度。
步骤:(1)安装一个车载测速仪。
(2)使用轮速传感器或其他传感器来测量车辆的速度。
(3)根据车载测速仪上显示的数据来计算出车辆的平均速度。
四、光学式车速测量方法1. 雷达测速法原理:雷达发射器向前发射一束微波信号,当这束信号碰到汽车时,会反弹回来。
通过比较发射和回波之间的时间差来计算汽车的平均速度。
步骤:(1)安装一个雷达发射器和接收器。
(2)将雷达朝向汽车行驶方向,并启动雷达发射器。
(3)比较发射和回波之间的时间差,并根据公式:车速=距离÷时间,计算出车辆的平均速度。
2. 激光测速法原理:激光测速仪向汽车发射一束激光,当激光碰到汽车时,会反射回来。
通过比较发射和回波之间的时间差来计算汽车的平均速度。
如皋市测速路线登记表
如皋市测速路线登记表概述如皋市是位于中国江苏省东北部的一个县级市,交通繁忙。
为了控制交通安全和监测车辆速度,需要登记和记录如皋市的测速路线。
本登记表旨在详细记录如皋市各个测速路线的位置、距离、限速要求和其他相关信息。
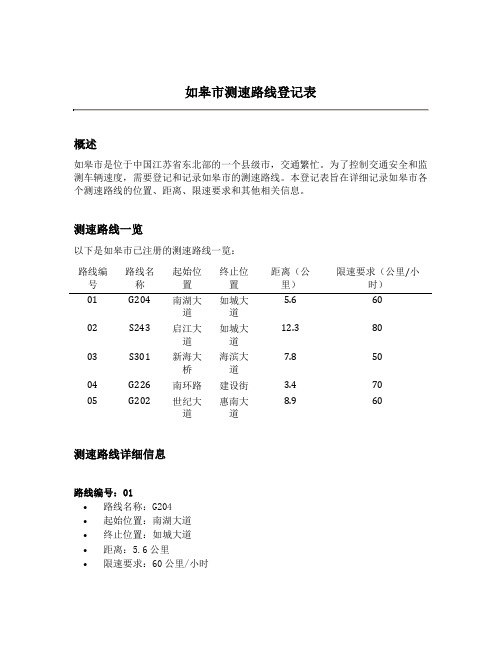
测速路线一览以下是如皋市已注册的测速路线一览:路线编号路线名称起始位置终止位置距离(公里)限速要求(公里/小时)01 G204 南湖大道如城大道5.6 6002 S243 启江大道如城大道12.3 8003 S301 新海大桥海滨大道7.8 5004 G226 南环路建设街 3.4 7005 G202 世纪大道惠南大道8.9 60测速路线详细信息路线编号:01•路线名称:G204•起始位置:南湖大道•终止位置:如城大道•距离:5.6公里•限速要求:60公里/小时该测速路线起始于南湖大道,终止于如城大道,全长5.6公里。
驾驶人员在该路线上应严格遵守限速要求,车速不得超过60公里/小时。
路线编号:02•路线名称:S243•起始位置:启江大道•终止位置:如城大道•距离:12.3公里•限速要求:80公里/小时该测速路线起始于启江大道,终止于如城大道,全长12.3公里。
驾驶人员在该路线上应严格遵守限速要求,车速不得超过80公里/小时。
路线编号:03•路线名称:S301•起始位置:新海大桥•终止位置:海滨大道•距离:7.8公里•限速要求:50公里/小时该测速路线起始于新海大桥,终止于海滨大道,全长7.8公里。
驾驶人员在该路线上应严格遵守限速要求,车速不得超过50公里/小时。
路线编号:04•路线名称:G226•起始位置:南环路•终止位置:建设街•距离:3.4公里•限速要求:70公里/小时该测速路线起始于南环路,终止于建设街,全长3.4公里。
驾驶人员在该路线上应严格遵守限速要求,车速不得超过70公里/小时。
路线编号:05•路线名称:G202•起始位置:世纪大道•终止位置:惠南大道•距离:8.9公里•限速要求:60公里/小时该测速路线起始于世纪大道,终止于惠南大道,全长8.9公里。
车辆测速系统程序设计方案

车辆测速系统程序设计方案项目介绍车辆测速系统是一种为了测量车辆行驶速度的系统。
通常情况下,车辆测速系统使用激光器或雷达测量车辆行驶的速度。
本文将讨论车辆测速系统的程序设计方案。
程序设计概述该系统主要由以下几部分组成:•激光器或雷达设备:用于测量车速。
•嵌入式计算机:对测速仪器采集的数据进行处理,包括筛选、解码、计算等操作。
•显示设备:将测量结果显示给用户。
系统程序设计方案数据采集车辆测速系统的核心是数据采集,其中激光器和雷达设备是最常见的数据采集设备。
激光器和雷达设备都能够测量车辆的时间和距离,并转化为车辆的速度。
为了更好地获取数据,测试设备应安装在具有横向稳定性的地方(例如大型混凝土表面)。
数据处理系统采用以下步骤进行数据处理:1.采集原始数据。
2.转换原始数据格式并进行筛选,以剔除不需要的数据。
3.计算车辆速度。
计算车速的数学公式是速度=路程÷时间。
对于车辆来说,路程即为激光束或雷达信号从之前的位置到目标车辆的位置所需的行驶距离。
时间是从激光束或雷达信号发射到接收到反射信号所需的时间。
系统将采集到的距离和时间信息通过公式计算车速。
显示测量结果测量结果按照需要通过显示器的形式显示。
例如,可以使用LED数字显示器显示车速。
还可以使用计算机或移动设备来记录和分析车速数据。
系统设计要求车辆测速系统设计应该满足以下要求:1.系统应该准确地测量车速,并且可以在多种气象条件下稳定工作。
2.数据处理应该根据测量结果提供准确的车速信息。
3.程序应该尽可能的优化,以最小化处理时间并提高系统响应速度。
4.系统应该符合行业标准和相关的法律法规。
结论以上是车辆测速系统程序设计方案的细节。
通过采用合适的设备和进行相应的数据处理,车辆测速系统能够提供准确的车速信息。
要设计一个良好的车辆测速系统,需要对激光器和雷达设备的工作原理有深入的了解,并能够开发出稳定可靠的程序。
车辆测速方案

车辆测速方案车辆测速是交通管理中的一项重要任务,对于提高交通安全、合理规划道路建设和加强交通管理具有重要意义。
车辆测速可以通过不同方式实现,主要包括以下三种方案:方案一:固定测速固定测速是将测速设备固定在道路上,通过测速仪器对经过的车辆进行测速并记录车速。
固定测速最大的优点是精确度高,能够记录每一辆车通过该处的实际车速,并根据设定的限速标准进行判断和处理。
此外,固定测速还可以持续监测道路的车流量和道路拥堵情况,有利于交通管理和道路规划。
固定测速的不足主要在于,需要大量的设备维护和人力资源,还需要投入一定的经济和物力,难以快速应对突发事件和道路拥堵情况。
方案二:移动测速移动测速是一种弹性较大的测速方式,测速设备可以随时被移动到需要监测的位置。
一般情况下,移动测速仪器被安装在摩托车或轿车上,在经过需要监测的路段时进行测速。
移动测速的优点是灵活性强、成本低廉,能够快速应对突发情况和道路拥堵。
移动测速的不足在于,需要对移动测速设备的状况进行维护,并且测速难以像固定测速一样精确。
测速人员的技能和经验对于测速结果也会产生影响。
方案三:微信测速微信测速是当前新兴的一种测速方案,采用微信公众号的形式,用户通过微信扫码,上传车辆照片和车速信息,并对车辆照片的真实性进行验证。
微信测速的优点是操作简单、用户广泛、费用低廉。
同时,微信测速也可以成为一种有趣的交通安全宣传方式,鼓励驾驶员遵守交通规则。
微信测速的不足主要在于,测速结果难以得到准确的数据支持。
很多人出于隐私和安全考虑,不愿意上传车辆照片和车速信息,这也会影响测速的准确性。
此外,微信测速需要配合其他测速方案使用,不适用于超速采集,仅适用于道路拥堵状况监测和安全提示等方面。
综上所述,车辆测速方案应根据需要确定具体方案。
在固定测速和移动测速之间权衡时,应根据各自的优缺点进行评估并综合考虑,以达到最优方案的效果。
微信测速可以作为补充方案,增加交通安全宣传的效果。
基于51单片机控制的循迹小车
毕业设计(论文)课题名称:基于单片机控制的循迹小车指导教师:系别:专业:班级:姓名:摘要本文论述了基于单片机的智能循迹小车的控制过程。
智能循迹是基于自动引导机器人系统,用以实现小车自动识别路线,以及选择正确的路线。
智能循迹小车是一个运用传感器、单片机、电机驱动及自动控制等技术来实现按照预先设定的模式下,不受人为管理时能够自动实现循迹导航的高新科技。
该技术已经应用于无人驾驶机动车,无人工厂,仓库,服务机器人等多种领域。
本设计采用89C52单片机作为小车的控制核心;采用RPR220红外反射式开关传感器作为小车的循迹模块来识别白色路面中央的黑色引导线,采集信号并将信号转换为能被单片机识别的数字信号;采用驱动芯片L298N构成双H桥控制直流电机,其中软件系统采用C程序,本设计的电路结构简单,容易实现,可靠性高目录摘要 (1)目录 (1)第1章绪论 (2)1.1课题背景 (2)1.2课题研究的目的和意义 (3)1.3 本设计的意义 (4)第二章方案论证 (4)2.1 控制器方案论证 (4)2.2 供电单元方案论证 (5)2.3 智能循迹小车电源模块的选择 (5)2.4智能循迹小车电机驱动电路的选择 (5)2.5 检测循迹模块 (5)2.5 显示模块论证 (6)第三章智能循迹小车硬件部分 (6)3.1 系统总体方案 (6)3.2 单片机最小系统 (7)3.3 电源模块 (8)3.4 电机驱动模块 (9)3.5 循迹单元电路 (10)3.6测速模块电路 (13)3.7 显示模块电路 (13)第四章循迹小车项目软件流程图 (14)4.1 总体软件流程图 (14)4.2小车循迹流程图 (15)4.3中断程序流程图 (16)第五章总结 (17)第六章致谢 (18)第七章参考文献 (18)附图设计总体图 (19)封底.................................................................................................................... 错误!未定义书签。
智能小车控制系统的设计分析

摘要随着自动控制技术的迅速发展,自动化技术已广泛应用于国计民生的各行各业。
智能汽车就是自动化技术发展的重要成果之一。
本文介绍了智能小车的研究设计背景与现状及其各个工作模块的工作原理、硬件及软件设计。
本设计中的自动循迹模块采用光电传感器循迹方法,选用RPR220型红外一体式发射接收管作为光电传感器,通过三组光电传感器识别小车的运行姿态。
避障模块利用超声波测距传感器,超声波发射部分的换能器选用TCT40-16T,接收部分选用TCT40-16R,在小车的左前右分别安装一组测距传感器实现避障功能。
设计遥控模块对小车进行启停及加减速控制,通过光电编码实现对小车的测速功能。
设计显示模块从而实时了解小车的运行状态。
选用包含H桥的L298N模块,利用PWM驱动小车行驶。
关键字:循迹,避障,遥控,显示,测速,PWM驱动ABSTRACTWith the rapid development of automatic control technology, automation technology has been widely used in various industries of the national economy and the people’s livelihood. Smart car is one of the important results of the development of automation technology. This article describes the design background and current situation of the intelligent car and the working principle, hardware and software design of the car’s modules.The automatic tracking of this design uses photoelectric sensor tracking method, and we choose RPR220 as the photoelectric sensor, which integrate the infrared transmitting and receiving tubes, three sets of photoelectric sensor distinguish the car’s running posture. Obstacle avoidance module utilizes ultrasonic distance sensor. We choose TCT40-16T as the emitting portion of the ultrasonic transducer and TCT40-16R as the receiving portion. Three distance measuring sensors are respectively fixed on the front, left and right of the car to achieve the obstacle avoidance function. Design remote control to control the start,stop,acceleration and deceleration of the car, and we utilize the optical-electricity encoder to realize the car’s speed measuring function. Design the display module to know the real-time of the car. Choose the L298N module which contains the H-bridge and utilize the PWM to drive the intelligent car running.KEYWORDS:tracking, obstacle avoidance, remote control, display, speed measurement, PWM driving目录摘要(中文) (1)摘要(外文) (2)1 绪论 (1)1.1 设计背景与意义 (1)1.2 当前国内外的研究设计现状及成果 (2)1.2.1 国外研究现状及成果 (2)1.2.2 我国研究现状及成果 (3)1.3 本设计的内容及结构 (4)1.3.1 设计内容 (4)1.3.2 本文结构 (5)2 智能小车控制系统的设计原理 (7)2.1、智能小车自动循迹原理 (7)2.1.1 小车循迹原理 (7)2.1.2 光电传感器工作原理 (8)2.1.3 光电传感器的常用类型 (9)2.2 超声波测距避障原理 (9)2.3 智能小车测速原理 (12)2.3.1直流电机测速 (12)2.3.2 光电码盘测速 (14)2.4 智能小车遥控原理 (15)2.4.1 红外遥控的实现模块 (15)2.4.2 红外遥控的工作原理 (15)2.5 智能小车的电机驱动电路工作原理 (16)3 智能小车控制系统的硬件电路图设计 (17)3.1 智能小车的电源模块设计 (17)3.2 智能小车自动循迹的硬件电路设计 (18)3.2.1 循迹传感器选择 (18)3.2.2 循迹电路图设计 (19)3.3 智能小车超声波测距的硬件电路设计 (20)3.3.1 超声波发射部分的硬件电路设计 (20)3.3.2 超声波接收部分的硬件电路设计 (20)3.4 智能小车数码显示的硬件电路设计 (21)3.4.1 LED数码显示器的结构与显示段码 (21)3.4.2 LED数码显示器的显示方法 (23)3.4.3 数码显示的硬件设计 (23)3.5 智能小车遥控的硬件电路设计 (24)3.5.1 智能小车的遥控发射模块硬件设计 (24)3.5.2 智能小车的遥控接收模块硬件设计 (25)3.6 智能小车电机驱动的硬件电路设计 (26)3.6.1 智能小车的电机驱动芯片选择 (26)3.6.2 智能小车的电机驱动电路的设计 (27)3.7 智能小车整体的硬件电路设计 (27)4 智能小车控制系统的软件设计 (29)4.1 主程序设计 (29)4.2 自动循迹模块程序设计 (30)4.3 测距避障模块程序设计 (2)4.4 数码显示模块程序设计 (3)4.5 编码测速模块程序设计 (4)4.6 红外遥控模块程序设计 (5)总结............................................... 错误!未定义书签。
汽车测速数据分析报告

汽车测速数据分析报告汽车测速数据分析报告本次测速数据分析是基于一辆小型汽车在道路上的行驶速度进行的。
根据测得的数据,我们对汽车速度的分布、平均速度和行驶时间进行了详细分析。
首先,我们对汽车速度的分布进行了统计。
测速数据显示,汽车的速度分布呈正态分布,大部分汽车速度集中在50-70公里/小时之间。
这意味着汽车在道路上的行驶速度相对稳定,且遵循交通规则。
然而,我们也发现一小部分汽车速度超过了80公里/小时,这可能是由于道路条件好或驾驶员超速驾驶引起的。
其次,我们计算了汽车的平均速度。
通过对测速数据进行加权平均,我们得出这辆小型汽车的平均速度约为60公里/小时。
这一结果表明,该汽车的行驶速度较为稳定,并且与道路限速相符。
然而,我们也注意到,由于交通流量的变化和路况的不同,汽车的平均速度会有所波动。
因此,及时调整速度以适应道路变化是确保交通安全的重要措施。
最后,我们对汽车的行驶时间进行了分析。
根据测速数据,我们计算出汽车在道路上的平均行驶时间为1小时。
然而,我们还需要考虑其他因素,如交通拥堵和信号灯等,这些因素会影响汽车的行驶时间。
因此,在规划行程时,我们应该合理预估行驶时间,以避免因路况不佳而延误。
综上所述,根据测速数据分析结果,我们可以得出以下结论:小型汽车在道路上的行驶速度相对稳定,较为符合交通规则和道路限速;汽车的平均速度约为60公里/小时,而行驶时间则需要根据道路条件和其他因素的变化进行调整。
基于这些结论,我们可以采取相应的措施,如强调交通安全意识、宣传遵守交通规则和限速等,以提高道路交通安全水平。
同时,我们还应该加强道路监管,通过道路改造和交通管理的手段,优化路况,减少交通拥堵,提高汽车的行驶效率。
测速抓拍施工方案
测速抓拍施工方案1. 引言本文档详细描述了测速抓拍施工方案。
该方案旨在通过使用测速抓拍设备,对车辆进行实时速度监测和抓拍,以提高交通管理效率和道路安全性。
2. 方案背景随着车辆数量的不断增加,道路交通管理变得越来越重要。
测速抓拍技术作为交通管理的一种重要手段,可以对违法行为进行监测和记录。
通过对违法行为进行有效监管,可以提高道路交通秩序和安全水平。
3. 方案概述本方案采用测速抓拍设备,结合图像识别和数据分析技术,实现对车辆的实时速度监测和抓拍。
具体实施步骤如下:3.1 设备部署在目标道路的适当位置设置测速抓拍设备,设备数量和位置根据实际需要确定。
设备需要确保视野范围覆盖到道路上的所有车辆。
3.2 数据采集设备通过图像传感器实时采集道路上的车辆图像,并将采集的图像数据传输到数据中心。
同时,设备还需要采集车辆的速度信息,可以利用雷达或其他传感器实现。
3.3 图像识别在数据中心,对采集到的车辆图像进行图像识别处理。
使用先进的计算机视觉算法,对车辆进行识别和分类,提取出车辆的特征信息。
3.4 速度计算通过车辆图像中的特征信息,结合设备采集到的速度数据,计算出每辆车的实时速度。
速度计算可以采用基于图像处理的方法,通过测量车辆在图像中的位移来计算速度。
3.5 违法判断对于超速的车辆,根据预设的速度限制,判断其是否属于违法行为。
如果超速,则将该车的图像和速度信息保存到数据库中,作为证据进行后续处理。
4. 方案优势测速抓拍施工方案具有以下优势:•实时监测:通过测速抓拍设备,可以实时对车辆进行速度监测和抓拍,及时发现和处理违法行为。
•高效便捷:采用图像识别和数据分析技术,可以自动化完成对车辆的速度计算和违法判断,避免人工操作的繁琐和误差。
•数据分析:通过对抓拍数据进行分析,可以了解道路上的交通流量、车辆速度分布等信息,为交通管理和规划提供科学依据。
5. 预期效果测速抓拍施工方案的预期效果包括:•提高交通管理效率:通过实时监测和抓拍,能够有效管理道路上的交通秩序,减少违法行为发生。
小车 测速 物理知识点总结

小车测速物理知识点总结引言在现代社会中,汽车已成为人们生活中不可或缺的一部分。
随着城市化进程的加快和生活水平的提高,汽车的使用越来越广泛。
而随之而来的问题就是交通安全问题,其中一个重要的问题就是汽车的速度管理。
因此,对汽车测速的物理知识进行总结是非常有必要的,这有助于我们更加深入地了解汽车测速的原理和方法,有助于提高交通安全意识,规范驾驶行为。
一、速度的定义和计算速度是物体在单位时间内发生位移的量,通常用v表示,其数值等于物体的位移量与时间的比值。
在物理学中,速度的计算公式为:v=Δx/Δt,其中Δx表示物体的位移,Δt表示时间。
在汽车测速中,速度一般是指汽车在单位时间内所行驶的路程长度。
测速仪器通过追踪汽车的位移变化和时间变化,计算汽车的速度。
二、测速原理1. 雷达测速雷达测速是一种常用的汽车测速方法,其原理是利用雷达信号的多普勒效应测量汽车的速度。
当雷达信号与运动汽车相遇时,因多普勒效应造成的频率变化可以用来计算出汽车的速度。
多普勒效应是指当发射信号源和接收信号源相对运动时,接收到的信号频率会发生变化。
对于汽车测速来说,雷达测速器会发射一束微波信号,当这束信号遇到运动的汽车时,会发生频率变化,利用这个频率变化的差异就可以计算出汽车的速度。
2. 摄像头测速摄像头测速是利用视频监控技术对汽车进行测速的方法。
其原理是通过摄像头拍摄汽车在单位时间内的位移,并根据这些位移数据计算汽车的速度。
摄像头测速的原理实际上和雷达测速类似,都是通过追踪汽车的位移变化和时间变化来计算汽车的速度。
不同的是,摄像头测速是通过摄像头拍摄汽车的图像,利用计算机对图像进行处理来得到汽车的位移数据。
3. 超声波测速超声波测速是一种利用超声波来测量汽车速度的方法。
其原理是利用超声波的回波时间和运动汽车的距离来计算汽车的速度。
当超声波发射器向汽车发射超声波时,超声波会被汽车反射回来,测速仪器通过测量超声波的往返时间和汽车的距离,来计算汽车的速度。
2020最新学年度八年级物理上册 3.4 平均速度的测量练习 (新版)北师大版(考试专用)

3.4 平均速度的测量一.选择题(共12小题)1.小明步行的平均速度是1.2m/s,从家到学校要走15min,那么他上学要走的路程是()A.1080m B.108m C.18km D.0.3km2.某同学乘坐高铁,看到车厢内显示的车速为216千米/时。
他估测车厢通过隧道用了10秒,则隧道长度约为()A.60米B.600米C.2160米D.7776米3.如图是某物体在水平地面上作直线运动的s﹣t图象,以下结论正确的是()A.物体在0﹣2s内做变速运动B.物体在2﹣4s内运动速度是5m/sC.物体在前2s内和后2s的速度相等D.物体在6s内运动速度是2.5m/s4.小华同学放学回家的路上,一半路程步行,一半路程骑自行车。
路程与时间的关系图象如图所示,由图可得()A.步行的是图中AB段B.小华家到学校的路程为1800mC.小华骑车的速度为360m/sD.小华步行的速度为90m/s5.百米赛跑时,站在终点的计时员听到起跑枪声开始计时,运动员到达终点时秒表的读数为11.59s,则运动员百米赛跑的实际时间应为()A.11.30s B.11.59s C.11.88s D.11.18s6.某学习小组对一辆在平直公路上做直线运动的小车进行观测研究。
他们记录了小车在某段时间内通过的路程与所用的时间,并根据记录的数据绘制了路程与时间的关系图象,如图所示。
根据图象可以判断()A.0~5s内,小车的平均速度是0.4m/sB.0~7s内,小车的平均速度是1.5m/sC.2~5s内,小车受到的是非平衡力D.5~7s内,小车受到的是非平衡力7.甲、乙、丙三个物体同时同地沿同一直线做匀速直线运动,其中甲、乙的s﹣t图象如图所示,已如8秒时丙距离甲、乙的距离恰好相等。
则()A.丙可能与甲的运动方向相反B.丙的s﹣t图一定在甲的图线上方C.丙一定与乙的运动方向相同D.丙的s﹣t图线可能在乙的图线下方8.汽车后刹车灯的光源,若采用发光二极管(LED),则通电后亮起的时间会比采用白炽灯大约快0.6s,故有助于后车驾驶员提前做出反应,即遇到情况时可提前0.6s刹车。
测量小车的平均速度实验报告
测量小车的平均速度实验报告
实验目的:测量小车的平均速度。
实验器材:小车、直尺、秒表、测量带。
实验原理:
平均速度可以通过测量物体在一段时间内所走过的距离,然后除以所花费的时间来计算。
平均速度的计算公式如下:
平均速度 = 总位移 / 总时间
实验步骤:
1. 准备工作:将小车放在直尺上。
2. 将小车推动,开始计时。
3. 记录小车经过的位置,并记录经过的时间。
4. 继续推动小车,直到它停下来。
5. 停止计时并记录总时间。
6. 使用测量带测量小车的总位移。
7. 计算小车的平均速度。
实验数据记录:
小车总位移:10米
总时间:8秒
实验结果计算:
平均速度 = 小车总位移 / 总时间
平均速度 = 10 / 8 = 1.25米/秒
实验结论:根据实验数据计算得出,小车的平均速度为1.25米/秒。
实验误差分析:
实验中可能存在的误差包括小车行走过程中的摩擦力等非理想因素。
此外,实验数据的记录和测量也可能存在一定的误差。
实验改进:
为了提高实验结果的准确性,可以采取以下改进措施:
1. 重复实验多次,取多组数据求平均值,以减少误差的影响。
2. 使用更精确的测量工具,如数字测量仪器,提高测量的准确度。
3. 在小车行走过程中避免干扰因素,例如减少与地面的摩擦力等。
4. 进一步优化实验设计,考虑影响因素对实验结果的影响。
总结:
通过这次实验,我们成功测量出了小车的平均速度,并对实验误差进行了分析。
通过改进实验方法,可以进一步提高实验的准确性和可靠性。
测量小车运动的速度实验报告
测量小车运动的速度实验报告1. 实验目的这次实验,我们的目标就是要探究小车的运动速度,了解运动的基本规律。
想象一下,一个小车飞驰而过,风在耳边呼啸,心里那种兴奋的感觉,真是让人心潮澎湃!我们希望通过实验,能够准确地测量出小车的速度,并掌握一些简单的物理原理。
2. 实验材料2.1 小车首先,我们得准备一个小车。
没错,就是那种简单的玩具车,越小越好,毕竟速度和灵活性是关键。
选了一辆颜色鲜艳的小车,简直像是运动会的明星,吸引了大家的目光。
2.2 直线轨道接下来,我们需要一条直线轨道。
这个就简单了,用一根长长的木板或者塑料条都行,保证它平平整整,没有任何障碍物。
这样小车才能尽情飞驰,不至于“翻车”。
2.3 秒表最后,我们得准备一个秒表,或者干脆用手机上的计时器。
科技真是发达,几年前可没这么方便。
只要一按下按钮,就能精准地记录下小车的行驶时间。
3. 实验步骤3.1 准备阶段首先,我们把轨道摆好,确保它稳稳当当,别在实验过程中出现意外。
然后,把小车放在轨道的起点,深吸一口气,准备开始。
感觉就像是在看一场激烈的比赛,心里那个紧张啊,简直不亚于看世界杯!3.2 进行实验接下来,朋友们准备好,计时器也准备好,我们一起喊“3、2、1,GO!”小车开始冲出起点,像离弦的箭一样飞奔。
此时,记得要准确地按下秒表,记录下小车行驶到终点的时间。
哎呀,这一瞬间真是让人热血沸腾,感觉自己也成了小车的一部分。
3.3 计算速度实验完成后,我们得把记录下来的数据整理一下。
速度的计算公式是:速度=距离/时间。
我们可以简单地把小车走过的距离(比如说1米)除以它的时间,这样就能得到小车的速度。
听起来是不是很简单?其实也就是那么回事,但结果却能让我们大开眼界。
4. 数据分析通过几次实验,我们得到了不同的速度数据。
有的同学的小车像风一样快,而有的则稍显逊色。
我们把这些数据一汇总,发现确实有些规律可循。
哦,原来影响速度的因素还包括小车的重量、轨道的摩擦力等等,真是让人豁然开朗。
初二物理关于测速仪的题

初二物理关于测速仪的题一、测速仪是利用什么原理来测量车辆速度的?A. 光的反射B. 多普勒效应C. 声的传播速度D. 电磁感应(答案:B)二、下列哪个设备不是基于多普勒效应工作的?A. 测速仪B. 超声波测距仪C. 雷达D. 电子秤(答案:D)三、在使用雷达测速仪时,如果接收到的反射波频率高于发射波频率,说明被测物体是?A. 静止的B. 向测速仪靠近的C. 远离测速仪的D. 无法判断(答案:B)四、测速仪发出的超声波在空气中传播速度为340m/s,若某车接收到超声波后0.02s反射回来,且此时测速仪显示该车速度为30m/s,则超声波遇到车时,车与测速仪的距离最接近?A. 3.4mB. 3.1mC. 3.7mD. 4.0m(答案:B)【注:需考虑车在0.02s内也移动了一段距离】五、关于雷达测速仪,下列说法错误的是?A. 能测量运动物体的速度B. 能确定物体的位置C. 只能用于测量车辆速度D. 利用了电磁波的特性(答案:C)六、测速仪在测量车辆速度时,如果车辆是匀速直线运动,那么测速仪测得的速度是?A. 瞬时速度B. 平均速度C. 既是瞬时速度也是平均速度D. 无法确定(答案:C)【注:在匀速直线运动中,瞬时速度等于平均速度】七、下列哪种情况会导致测速仪测量结果偏小?A. 测速仪与被测车辆之间有强风B. 被测车辆实际速度远大于限速C. 测速仪校准不准确,偏差为正D. 被测车辆在测速瞬间减速(答案:D)八、雷达测速仪发出的信号波和接收到的反射波在频率上的差异,是由于?A. 信号波在传播过程中衰减B. 信号波与反射波叠加产生干涉C. 被测物体与测速仪之间的相对运动D. 测速仪内部电路故障(答案:C)。
汽车雷达测速原理

汽车雷达测速原理1. 引言汽车雷达是一种用于测量车辆速度的重要设备,它利用雷达技术实现对车辆的测速。
本文将详细探讨汽车雷达测速的原理及相关技术。
2. 汽车雷达的工作原理汽车雷达测速原理基于多普勒效应,通过测量目标车辆反射回来的微波信号频率的变化来计算车辆的速度。
其工作原理如下:2.1 发射信号汽车雷达首先发射一束微波信号,它由雷达天线产生并通过发射机发射出去。
发射信号的频率通常在10-100 GHz之间。
2.2 接收反射信号当发射信号遇到目标车辆时,部分信号会被目标车辆反射回来,并由雷达天线接收。
2.3 频率变化由于目标车辆在接收信号时正在运动,反射信号的频率会因多普勒效应而发生变化。
如果目标车辆远离雷达,反射信号频率会变低;如果目标车辆靠近雷达,反射信号频率会变高。
2.4 信号处理接收到反射信号后,雷达会对信号进行处理,提取出频率变化的信息。
2.5 速度计算通过对频率变化的信息进行分析和计算,汽车雷达可以准确地计算出目标车辆的速度。
3. 汽车雷达测速的精度和可靠性汽车雷达测速具有较高的精度和可靠性,主要得益于以下因素:3.1 高频信号汽车雷达使用高频微波信号进行测速,相比于传统的红外线测速仪器,高频信号具有更高的精度和可靠性。
3.2 多普勒效应多普勒效应是汽车雷达测速的基础,通过测量频率变化可以实现对车辆速度的准确测量。
3.3 高灵敏度接收器汽车雷达配备了高灵敏度的接收器,可以接收到微弱的反射信号,并对其进行精确处理。
3.4 高速信号处理器汽车雷达使用高速信号处理器对接收到的信号进行快速处理,提高了测速的实时性和准确性。
3.5 多目标处理能力汽车雷达能够同时处理多个目标车辆的反射信号,实现对多车辆的测速。
4. 汽车雷达测速的应用领域汽车雷达测速技术在许多领域都有重要应用,主要包括以下几个方面:4.1 交通管理汽车雷达可以应用于交通管理,用于测量车辆的速度并监控交通流量,从而提供实时的交通信息。
监控区间测速的应用原理
监控区间测速的应用原理1. 简介监控区间测速是一种常见的交通管理手段,旨在对车辆在特定区间的速度进行监控和管理。
本文将介绍监控区间测速的应用原理。
2. 原理解析监控区间测速的应用原理主要包括以下几个步骤:2.1 安装监控设备首先,在待监控的区间内安装监控设备。
监控设备通常由摄像头和测速仪组成,摄像头用于拍摄车辆的过程图像,测速仪用于测量车辆的速度。
2.2 图像识别监控设备拍摄到的图像会经过图像识别算法进行处理。
图像识别算法可以识别出图像中的车辆,并提取出车辆的相关信息,如车辆的类型、车牌号等。
2.3 车辆匹配通过对不同时间段拍摄到的图像进行比对,可以将同一辆车在不同点位处拍摄到的图像进行匹配,从而得到该车在监控区间内的行驶路线和速度。
2.4 速度计算根据匹配到的车辆行驶路线和时间间隔,可以计算出车辆在监控区间内的平均速度。
通常,测速仪会测量车辆通过监控区间的时间,并与车辆的行驶路线进行匹配,从而计算出车辆的实际速度。
3. 优势与应用场景监控区间测速的应用原理具有以下优势和适用场景:3.1 提高道路安全通过监控区间测速,可以对车辆的行驶速度进行监控和管理,从而减少超速行驶和交通事故的发生,提高道路安全性。
3.2 效率高与传统的测速手段相比,监控区间测速能够实现对车辆在特定路段的全程测速,无需进行单点测速,提高了测速的效率。
3.3 自动化管理监控区间测速可以实现对车辆的自动监控和测速,不需要人工干预,减少了人力成本。
3.4 适用场景监控区间测速适用于高速公路、高速铁路、城市道路等需要对车辆速度进行监控和管理的场景。
4. 监控区间测速的相关技术监控区间测速的应用原理涉及到多个相关技术,如图像识别、车辆匹配等。
下面将简要介绍几种常用的相关技术:4.1 图像识别技术图像识别技术主要用于提取图像中的车辆信息,如车辆类型、车牌号等。
常见的图像识别算法有卷积神经网络(CNN)、支持向量机(SVM)等。
4.2 车辆匹配技术车辆匹配技术用于将不同时间段拍摄到的图像中的同一辆车进行匹配,得到车辆的行驶路线和速度。
车辆测速方案
车辆测速方案随着交通事故的不断增多,车辆超速行为已经成为造成交通事故的一个重要因素。
为提高道路交通安全水平,车辆测速已经成为交警管理的一个重要手段之一。
本文就车辆测速方案进行概述。
车辆测速介绍车辆测速是监测车辆速度的一种技术手段,可以通过设定测速点、使用合适的测速仪器、辅助设备和数据分析软件等方式实现。
根据对测速点的选定和监管手段的不同,车辆测速分为固定测速和移动测速。
固定测速一般采用测速仪器和摄像机等对道路上的车辆进行测速,移动测速则是特别针对某些区域或场所进行的测速活动。
车辆测速方案对于车辆测速方案,应根据实际情况进行详细的规划和设计,其中主要包括测速点的选定、测速仪器和辅助设备的布置、数据存储和分析等方面。
测速点选定车辆测速的目的是为了监测车辆的速度,所以测速点的选定是车辆测速方案的重要环节之一。
在确定测速点的位置时,应考虑到车辆的通过速度、交通流量、车道宽度、路面平整度以及安全性等因素。
一般情况下,选择直路、无路口信号等交通设施比较简单的道路进行测速,可以收集更多的数据和减少出错的可能。
测速仪器和辅助设备的布置测速仪器和辅助设备的布置是车辆测速方案的关键环节之一。
一般选择使用激光雷达测速、摄像测速或者微波雷达等测速仪器和摄像机等获得监控视频信号数据。
放置测速仪器和摄像机的位置应当符合测量要求,在测速要求的范围内放置激光测速仪器、摄像测速仪器、车辆捕获装置等。
测速仪器和辅助设备的布置应当细化、规范和科学,这样才能对车辆的测速数据进行准确地获取和分析。
数据存储和分析车辆测速的数据存储和分析是车辆测速方案不可或缺的一部分。
车辆测速数据的存储以及后期数据挖掘和分析,都需要有专业的数据处理系统和人员技术支持。
数据处理系统应当有足够的存储空间,能够满足数据的存储需求,并能够在以后进行在线性能监测、历史数据查询、统计分析等方面提供更好的服务。
在存储和分析测速数据时,应当采用统计学方法对测速数据分析和探究,以达到更精确的数据分析、测量和监控目的。
测速仪原理应用的原理

测速仪原理应用的原理1. 测速仪的基本原理测速仪是一种用于测量速度的仪器。
它基于一定的原理和技术,通过测量物体在单位时间内所经过的距离,来计算出物体的速度。
测速仪可以应用在不同的领域,例如交通运输、工业生产等。
2. 测速仪的工作原理测速仪的工作原理主要包括以下几个方面:2.1 激光测速原理激光测速是一种常用的测速方法之一。
它利用激光束对目标进行照射,通过测量激光的反射时间来计算出目标的速度。
激光测速仪常用于交通领域,例如测量车辆的行驶速度。
2.2 雷达测速原理雷达测速是另一种常见的测速方法。
它利用雷达波对目标进行探测,通过测量雷达波的频率变化来计算出目标的速度。
雷达测速仪在交通领域广泛应用,特别是在交通管制和交通安全监控中。
2.3 音速测速原理音速测速是一种应用于空气动力学研究的测速方法。
它利用声音在空气中传播的速度与空气密度和温度相关联的原理,通过测量声音的传播时间来计算出目标的速度。
音速测速仪常用于航空航天领域的飞行器性能测试和研发。
3. 测速仪的应用原理测速仪在不同领域的应用原理有所差异,以下列举几个常见的应用原理示例:3.1 交通测速原理在交通领域,测速仪被广泛应用于交通管理和交通安全监控中。
利用激光或者雷达测速原理,测速仪可以实时准确地测量车辆的速度,并通过数据处理和分析,实现对违规超速行为的监测和处理。
3.2 工业生产测速原理在工业生产领域,测速仪被用于监测机器设备的转速和运行速度。
通过安装合适的传感器和测速仪,可以实时测量机器设备的转速,并通过数据分析来监测设备的运行状态,从而提高生产效率和质量。
3.3 航空航天研发测速原理在航空航天领域,测速仪被用于飞行器性能测试和研发。
通过音速测速原理,测速仪可以测量飞行器在不同速度下的空气动力学参数,从而优化设计和提高飞行器的性能和安全性。
3.4 科学研究测速原理测速仪在科学研究中也有广泛应用。
例如,在物理学研究中,利用粒子加速器和测速仪结合,可以测量粒子在高速运动过程中的速度和能量,揭示物质的微观结构和性质。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光接收器
光电发射接收电路
计数脉冲
#
类似课题1
排队机 原理: 每按键一次计 数值&表 车速显示 原理: 车转一轮计数 值+1
#
类似课题3
点滴计数器 原理: 每点一滴液体 计数值+1
#
#
• 脉搏、心跳计数器 • 跑步机计数器 • 打卡机 • 等等………
#
• 利用单片机的T0作为定时 • T1作为计数来完成测速的工作
#
• 不要在等待了
• 赶快试试看吧
#
小车测速
• 如何实现小车测速呢?
• 或许你现在满头雾水
• 看看下面这幅图或许会对你有所启发
#
齿 盘 每 转过一个齿, 光电对管就输 出一个脉冲。 通过脉冲频率 的测量或脉冲 计数,即可获 得齿盘转速和 角位移。
n
请写出转速与频率的关系式
n= ?
#
• 采用对射式光电传 感器,如右图所示
#
#
Receiver 光发射器