电感式位移传感器(中文)
位移传感器的工作原理
位移传感器的工作原理一、引言位移传感器是一种用于测量物体位移或者位置的设备,广泛应用于工业自动化、机械创造、航空航天等领域。
本文将详细介绍位移传感器的工作原理。
二、工作原理位移传感器的工作原理基于不同的物理原理,常见的包括电容式、电感式、光电式、压阻式等。
以下将分别介绍这些工作原理。
1. 电容式位移传感器电容式位移传感器利用电容的变化来测量位移。
它由两个电极组成,当物体挨近或者远离电极时,电容值会发生变化。
通过测量电容值的变化,可以确定物体的位移。
2. 电感式位移传感器电感式位移传感器利用电感的变化来测量位移。
它由线圈和铁芯组成,当物体挨近或者远离线圈时,线圈的电感值会发生变化。
通过测量电感值的变化,可以确定物体的位移。
3. 光电式位移传感器光电式位移传感器利用光的变化来测量位移。
它由光源、光电二极管和接收器组成,当物体挨近或者远离光电二极管时,接收器接收到的光信号强度会发生变化。
通过测量光信号强度的变化,可以确定物体的位移。
4. 压阻式位移传感器压阻式位移传感器利用电阻的变化来测量位移。
它由导电材料和弹性体组成,当物体施加压力或者位移时,导电材料的电阻值会发生变化。
通过测量电阻值的变化,可以确定物体的位移。
三、优缺点分析不同类型的位移传感器具有各自的优缺点,下面将对其进行分析。
1. 电容式位移传感器的优缺点优点:测量范围广、精度高、响应速度快、抗干扰能力强。
缺点:对环境温度和湿度敏感,价格较高。
2. 电感式位移传感器的优缺点优点:测量范围广、精度高、抗干扰能力强。
缺点:响应速度较慢,对温度变化敏感。
3. 光电式位移传感器的优缺点优点:测量范围广、精度高、响应速度快。
缺点:对光照强度和环境温度敏感。
4. 压阻式位移传感器的优缺点优点:价格低廉、结构简单、抗震动能力强。
缺点:测量范围较窄、精度较低。
四、应用领域位移传感器广泛应用于各个领域,以下列举几个常见的应用领域。
1. 工业自动化位移传感器在工业自动化中用于测量机械设备的位移、位置和变形,实现对设备运行状态的监测和控制。
位移传感器资料

位移传感器资料整理一定义位移传感器又称为线性传感器,它分为电感式位移传感器,电容式位移传感器,光电式位移传感器,位移传感器超声波式位移传感器,霍尔式位移传感器。
电感式位移传感器是一种属于金属感应的线性器件,接通电源后,在开关的感应面将产生一个交变磁场,当金属物体接近此感应面时,金属中则产生涡流而吸取了振荡器的能量,使振荡器输出幅度线性衰减,然后根据衰减量的变化来完成无接触检测物体的目的。
二分类2.1 按运动分类型直线位移传感器和角度位移传感器2.2 按材料分类a.金属膜位移传感器b.导电位移传感器c.光电式位移传感器d.磁敏式位移传感器e.金属玻璃铀传感器f.绕线式位移传感器g.电位器位移传感器2.3 广义分类A 机械式1)模拟式电位器式,电阻应变式,电容式,螺旋管电感式,差动变压式,涡流式,光电式,霍尔器件式,微波式,超声波式2)数字式光栅式和磁栅式B 接近式电容式,涡流式,霍尔效应式,光电式,热释电式,多普勒式,电磁感应式,微波式,超声波式C 转速式一般有光电式D 多普勒式E 液位式浮子式,平衡浮筒式,压差电容式,导电式,超声波式,放射式F 流量及流量式 电磁式,涡流式,超声波式,热导式,激光式,光纤式,浮子式,涡轮式,空间滤波式G 激光位移式三 原理及适用范围1. 机械位移传感器a.电位器式如图3.1.1所示为电位器的一般结构。
图3.1.2所示,电位器上电刷将电阻体电阻分成R 12和R 23,输出电压为U 12。
改变电刷的接触位置R 12亦随之改变,输出电压U 12也随着改变。
b.电容式常用的有变极距和变面积两种。
下面以变极距式电容传感器为例(如图3.1.3所示)进行说明。
可动极板移动引起d 发生变化,由C=εA/d 只要测出电容变化量C ∆就可以求出位移变化量d ∆。
c.螺旋管式电感位移传感器原理:螺旋管中铁芯的位移引起电感的变化,从而通过电感的变化量可求出位移的变化量。
24N AL lπμ=(其中l 为插入线圈的铁芯长度)图3.1.2 电位器电路图3.1.1 电位器的一般结构图3.1.3 变极距式电容传感器原理螺旋管电感位移传感器检测位移从数毫米到数百毫米,缺点是灵敏度低。
传感器与检测技术3电感式位移传感器

4
29
(二)互感式传感器—差动变压器
❖ 1.互感式传感器的结构与工作原理 ❖ 差动变压器工作在理想情况下(忽略涡流损耗、
磁滞损耗和分布电容等影响)时的等效电路:
30
(二)互感式传感器—差动变压器
❖ 1.互感式传感器的结构与工作原理 ❖ 当衔铁移向次级绕组N1一边,互感M1增大,M2减
小,因而次级绕组N1内的感应电动势大于次级绕 组N2内的感应电动势,这时差动变压器输出电动 势不为零。在传感器的量程内,衔铁位移越大, 差动输出电动势就越大。
0
2 0
0
0
1
线圈 铁芯
δ Δδ
8
(一)自感式传感器
❖1.自感式传感器的工作原理
❖ 变气隙式自感传感器的输出特性
L 1
SN 2 0 2 0
0
0
1
L
0 0
衔铁
L 1
/ 0
L 1 /
0
0
0
线圈 铁芯
δ Δδ
9
(一)自感式传感器
❖1.自感式传感器的工作原理
❖ 变气隙式自感传感器的输出特性
❖ 2. 原理消除零点残余电压方法: ❖ (1)从设计和工艺上保证结构对称性 ❖ 为保证线圈和磁路的对称性,首先,要求提高加
工精度,线圈选配成对,采用磁路可调节结构。 其次,应选高磁导率、低矫顽力、低剩磁感应的 导磁材料。并应经过热处理,消除残余应力,以 提高磁性能的均匀性和稳定性。由高次谐波产生 的因素可知,磁路工作点应选在磁化曲线的线性 段。
20
(一)自感式传感器
❖1.自感式传感器的工作原理
❖ 三种类型比较: ❖ 气隙型自感传感器灵敏度高,它的主要缺点是非
电感式位置传感器原理

电感式位置传感器原理
电感式位置传感器是一种常见的非接触式传感器,用于测量物体相对于
传感器的位置。
它基于电磁感应原理,利用线圈产生的磁场与目标物体的位
置关系来测量位置。
电感式位置传感器主要由线圈和交流电源组成。
线圈通常是螺线管状的,它通过通电产生一个磁场。
当目标物体靠近线圈时,它会改变线圈周围的磁
场分布。
当线圈的交流电源打开后,通过电磁感应的作用,目标物体对线圈周围
的磁场产生一个反作用力。
这个反作用力与目标物体与线圈之间的距离密切
相关。
通过测量线圈上的电流变化,我们可以确定目标物体与传感器之间的
位置。
具体来说,当目标物体靠近线圈时,磁感线的磁通量会增加,导致线圈
中的感应电流增加。
反之,当目标物体远离线圈时,磁通量减小,感应电流
减小。
在实际应用中,我们通常使用环形线圈或一个或多个线圈来实现位置的
测量。
通过测量线圈上的电感或电流变化,可以反映目标物体与传感器的位
置关系。
电感式位置传感器具有许多优点,如非接触式测量、高精度、长寿命等。
它在工业控制、汽车行业、机器人和航空航天等领域有广泛应用。
电感式位置传感器通过电磁感应原理,利用线圈的磁场与目标物体的位
置关系来测量位置。
它是一种可靠、精确的测量方式,为各种应用提供了重
要的位置信息。
直线位移传感器的工作原理
直线位移传感器的工作原理直线位移传感器(Linear displacement sensor)是一种用于测量物体直线移动距离的传感器。
它广泛应用于机器人、仪器仪表、自动化生产线等领域,用于实时监测和控制物体的位置。
其工作原理可以分为电感式、电容式、光电式和磁电式等。
一、电感式直线位移传感器:电感式直线位移传感器利用感应线圈的电感变化来测量位移。
其基本构造包括一对感应线圈以及一根可移动的金属臂,金属臂和感应线圈构成一个简单的变压器。
当金属臂移动时,感应线圈的电感会发生变化,进而导致输出信号的变化。
通过测量感应线圈回路的电感值,就可以确定物体的位移。
二、电容式直线位移传感器:电容式直线位移传感器采用了变电容的原理来测量位移。
其构造包括两块感应板和一块可移动的介电板。
在两块感应板之间,形成一个变动的电容结构。
当介电板移动时,感应板之间的电容值会发生变化,进而使得输出信号的电容值变化。
通过测量电容值的变化,就可以确定物体的位移。
三、光电式直线位移传感器:光电式直线位移传感器是通过光电原理来测量位移的。
其构造包括一个光源和一个光敏接收器。
光源发出的光射线被光敏接收器接收。
当物体位移时,光线被挡住或发生折射,光敏接收器接收到的光信号的强度就会变化。
通过测量光信号的变化,就可以确定物体的位移。
四、磁电式直线位移传感器:磁电式直线位移传感器利用磁感应原理来测量位移。
其构造包括一个磁电传感器和一个磁铁。
磁电传感器产生的磁场被磁铁吸引,当磁铁位移时,磁场的位置和强度会发生变化,磁电传感器测量到的电压信号也随之变化。
通过测量电压信号的变化,就可以确定物体的位移。
需要注意的是,不同类型的直线位移传感器在测量范围、精度、灵敏度等方面会存在差异。
同时,传感器的选用还需要根据具体应用场景来确定。
在使用直线位移传感器时,还需要考虑温度、湿度、耐久性等因素。
综上所述,直线位移传感器的工作原理涉及电感、电容、光电和磁电四种原理。
通过测量变化的电感、电容、光信号和电压等参数,就可以准确测量物体的直线位移。
第2章位移检测传感器之电感式

根据鼓励频率不同分为
高频反射式涡流传感器 — 自感型 低频透射式涡流传感器 — 互感型
(三)涡流式位移传感器
➢ 涡流旳大小与金属体旳电阻率ρ、磁导率μ、 厚度t以及线圈与金属体旳距离x、线圈旳鼓励 电流强度i,角频率ω等有关。假如固定其中某 些参数,就能由电涡流旳大小测量出另外某些 参数。
➢ 涡流位移传感器在金属体上产生旳涡流,其渗 透深度与传感器线圈旳鼓励电流旳频率有关, 所以涡流位移传感器主要分为高频反射和低频 透射两类,前者应用较广泛。
L
L0
L
N 20S0 2(0
)
L0
1
0
变气隙型自感传感器
当Δδ/δ0<<1时:
L
L0
L
L0 1
0
0
2
0
3
可求得电感增量ΔL和相对增量ΔL/L0旳体现式,即
L
L0
0
1
0
0
2
L L0
0
1
0
0
2
对上式作线性处理,即忽视高次项后,可得
差动变压器式位移传感器
互感位移传感器常采用差动形式,即两个二次 线圈采用差动接法,故又称为差动变压器式位 移传感器。
➢差动变压器式位移传感器有变隙式、变面积式和 螺管式等。
非电量测量中,应用最多旳是螺管式差动变压器, 它能够测量范围内旳机械位移,并具有测量精度高、 敏捷度高、构造简朴、性能可靠等优点
1. 工作原理与构造
一般气隙旳磁阻远不小于铁芯和衔铁旳磁阻 2 l 0S0 S
则Rm
2 0 s0
L N 2 N 20s0
Rm
2
1. 工作原理与构造
L N 2 N 20s0
电感式位移传感器应用场景

电感式位移传感器应用场景电感式位移传感器是一种常见的非接触式传感器,通过测量电感元件的感应电感变化来确定物体的位移。
它在工业自动化、航空航天、汽车制造等领域具有广泛的应用场景。
在工业自动化领域,电感式位移传感器被广泛应用于机械设备的位移检测和控制中。
例如,工业机器人在执行任务时,需要准确地感知工件的位置和位移信息,以便进行精确的操作。
电感式位移传感器可以被安装在机械臂上,实时监测工件的位置变化,从而实现精准的定位和位移控制。
在航空航天领域,电感式位移传感器被广泛应用于航空器和航天器的姿态控制和导航系统中。
航空器和航天器在飞行过程中需要保持稳定的飞行姿态,并实时感知自身的位移和姿态变化。
电感式位移传感器可以被安装在航空器的各个关键部位,测量飞行器的位移和姿态变化,为飞行控制系统提供准确的数据输入,保证飞行器的安全和稳定。
在汽车制造领域,电感式位移传感器也发挥着重要的作用。
例如,在汽车悬挂系统中,电感式位移传感器可以被安装在悬挂系统的关键部位,监测车辆的悬挂位移和姿态变化,从而实现悬挂系统的主动控制和调节。
除了以上提到的应用场景,电感式位移传感器还可以应用于其他领域。
例如,在医疗设备中,电感式位移传感器可以用于测量患者的身体位移和姿态变化,为医生提供准确的诊断数据。
在科学研究中,电感式位移传感器可以被应用于实验室设备的位移测量和控制,帮助科研人员进行精确的实验操作。
电感式位移传感器具有广泛的应用场景。
它在工业自动化、航空航天、汽车制造等领域发挥着重要的作用,实现了精准的位移检测和控制。
随着技术的不断发展,电感式位移传感器的应用场景将会越来越多样化,为各个领域的发展提供更加可靠和准确的数据支持。
位移传感器计算公式

位移传感器计算公式位移传感器是一种用于测量物体位移的装置,它通过转换物体的位移量为电信号,从而实现对位移的测量。
位移传感器广泛应用于工业、科研、航天、医疗等领域,起到了重要的作用。
位移传感器的计算公式是根据其工作原理和特性来确定的。
不同类型的位移传感器有不同的计算公式。
以下将介绍几种常见的位移传感器,并给出其计算公式。
1. 电感式位移传感器:电感式位移传感器是利用电感的变化来测量位移的。
其计算公式为:位移 = (电感值 - 基准电感值) / 灵敏度2. 电容式位移传感器:电容式位移传感器是利用电容的变化来测量位移的。
其计算公式为:位移 = (电容值 - 基准电容值) / 灵敏度3. 阻感式位移传感器:阻感式位移传感器是利用阻感的变化来测量位移的。
其计算公式为:位移 = (阻感值 - 基准阻感值) / 灵敏度4. 光电式位移传感器:光电式位移传感器是利用光电效应来测量位移的。
其计算公式为:位移 = (光电信号 - 基准光电信号) / 灵敏度5. 压阻式位移传感器:压阻式位移传感器是利用压阻的变化来测量位移的。
其计算公式为:位移 = (压阻值 - 基准压阻值) / 灵敏度需要注意的是,不同的位移传感器具有不同的灵敏度值,用于确定位移与信号变化之间的关系。
灵敏度值是通过实验或者生产厂家提供的技术参数来确定的,用户在使用时需要根据具体的情况进行设置。
位移传感器的计算公式可以帮助用户快速准确地获取位移信息。
在实际应用中,用户可以根据计算公式得到的位移值进行进一步的数据处理和分析,以满足自己的需求。
除了计算公式,位移传感器的选型和安装也是非常重要的。
用户在选择位移传感器时需要考虑测量范围、精度、响应时间等因素,并根据实际情况选择适合的传感器型号。
在安装过程中,用户需要注意传感器与被测物体的接触方式、安装位置等因素,以保证测量的准确性和稳定性。
位移传感器是一种重要的测量装置,其计算公式可以帮助用户准确地获取位移信息。
电感式位移传感器
电感式位移传感器1电感式位移传感器原理电感式传感器也称为自感式传感器或可变磁阻式传感器.图1为自感式传感器原理图,它是由线圈1、铁心2和衔铁3所组成.线圈是套在铁心上的.在铁心和衔铁之间有一个空气隙,空气隙厚度为δ.传感器的运动部分与衔铁相连,运动部分产生位移时,空气隙厚度δ产生变化,从而使电感值发生变化.由电工学可知,线圈的电感值可按下式计算:当铁心材料和线圈匝数确定后,电感L与导磁横截面S0成正比,与气隙长度δ成反比.如果通过被测量改变S0和δ,则可实现位移与电感间的转换,这就是电感传感器的工作原理.2电感式位移传感器分类电感式传感器分为3种类型:改变气隙厚度δ的自感传感器,即变间隙式电感传感器;改变气隙截面S的自感传感器,即变截面式电感传感器;同时改变气隙厚度δ和气隙截面S的自感传感器,即螺管式电感传感器.变间隙型电感传感器,这种传感器的气隙δ随被测量的变化而改变,从而改变磁阻.它的灵敏度和非线性都随气隙的增大而减小,因此常常要考虑两者兼顾.δ一般取在0.1~0.5毫米之间.改变面积型电感传感器,这种传感器的铁芯和衔铁之间的相对覆盖面积(即磁通截面)随被测量的变化而改变,从而改变磁阻.它的灵敏度为常数,线性度也很好.螺管插铁型电感传感器.它由螺管线圈和与被测物体相连的柱型衔铁构成.其工作原理基于线圈磁力线泄漏路径上磁阻的变化.衔铁随被测物体移动时改变了线圈的电感量.这种传感器的量程大,灵敏度低,结构简单,便于制作.3电磁式位移传感器实例3.1仪器简介浙江天煌科技实业有限公司,生产的TH-DGWY型电感式位移传感器,是以一种比较简单的机构来演示用改变电感来测量位移的方法.当待测物体移动时,带动软铁芯移动,软铁芯插入线圈的长度改变时,通电线圈的电感量会随之改变.仪器结构如图2和图3.3.3实验数据分析电源由J1209-2高中教学电源提供,根据实验要求,选用14V交流电压档,实际输出电压为U0=16.72V.当插入距离为零时,线圈两端的电压为U1=4.61V,电阻两端的电压为U2=12.67V.U0≠U1+U2,电压是标量,为什么不能简单叠加呢?关键的问题是相位差这个因素在起作用,对于电感元件,电压的相位超前电流的相位π/2.理想线圈L和电阻R串联,满足U0=U21+U22关系.随着插入距离增加,线圈电感增加,线圈两端的电压增加.更加直观体现,作电压-位移散点图(图4).随着科技的不断的发展,传感器融合了材料科学、纳米技术、微电子等领域的前沿技术,位移传感器应用范围非常之广,未来的传感器将会应用进去更多的新材料,改变传感器原有的缺陷,而位移式样的传感器也会更加的多元化以及多功能化,使其适用于不同的压力、温度,并且改进其测量方法使其可以测量出更多种类的精确数据,无论是位移传感器还是其他种类的传感器都将成为未来工业自动化控制的重要的不可缺少的一部分.。
电感位移传感器原理
电感位移传感器原理
电感位移传感器是一种常用的物理量测量装置,它利用电感的变化来测量被测量物的位移。
其工作原理可以简述如下:
1. 电感概念:电感是指导体中由于电流变化引起的磁场变化而产生的感应电动势,通过变化的磁场线圈内的电流的改变而产生。
2. 传感器结构:电感位移传感器通常由线圈和磁心以及测量平台组成。
线圈是由绕组和铁芯构成的,而磁心则通过被测量物体的位移来改变线圈的感应电势。
3. 工作原理:当目标物体发生位移时,磁心的位置也会随之改变。
磁心的移动会改变线圈的磁通,并且改变磁通量的变化将导致线圈中感应电势的变化。
4. 感应电势的测量:为了测量感应电势的变化,常常使用电阻、电容、或者其他电路元件将感应电势变换成易于测量的电压、电流或频率信号。
5. 位移的计算:最后,通过测量到的信号来计算出被测物体的位移。
通常,通过对感应电势信号进行放大、滤波等处理,然后利用相关的算法来精确计算位移值。
需要注意的是,电感位移传感器的工作原理一般不涉及到标题相同的内容,因为标题是用来归纳总结文章主要内容的,而电
感位移传感器的工作原理实际上可以通过上述几点简要说明清楚,并不需要标题来强调。
全面解析位移传感器的分类及原理
全面解析位移传感器的分类及原理位移传感器是一种用于测量物体位移的设备,主要用于工业控制、自动化技术以及其他领域的测量和监测应用。
位移传感器根据其原理和工作方式可以分为多种类型,下面将全面解析位移传感器的分类及原理。
1.电阻式位移传感器:电阻式位移传感器通过测量电阻值的变化来确定物体的位移。
它基于电阻值受到位移改变的影响而发生变化的原理。
常见的电阻式位移传感器有电阻片式、电阻编码器和电阻螺旋测微计。
2.容积式位移传感器:容积式位移传感器基于位移导致容积的变化而产生的压力变化,并通过测量压力变化来确定位移。
这类传感器常用于测量液体或气体的位移,如液位计。
3.电感式位移传感器:电感式位移传感器利用线圈中感应的磁感应强度与物体位移之间的关系来测量位移。
它通过变化的磁感应强度来检测物体的位置。
电感式位移传感器通常使用铁芯、线圈和信号处理电路构成。
4.容电式位移传感器:容电式位移传感器基于物体位移引起的电容变化来测量位移。
当物体靠近或远离电容感测器时,感测器电容值会发生变化,从而测量位移。
容电式位移传感器常应用于非接触式测量和微位移测量。
5.光学式位移传感器:光学式位移传感器利用光学原理来测量物体的位移。
常见的光学位移传感器有激光三角测距传感器、光纤位移传感器和光栅尺。
6.超声波位移传感器:超声波位移传感器利用超声波测距原理来测量物体的位移。
它通过发射超声波,并测量超声波的反射来测量位移。
7.磁敏式位移传感器:磁敏式位移传感器利用物体位移对磁场的影响来测量位移。
它通过测量磁场的强度或方向的变化来确定位移。
8.拉绳式位移传感器:拉绳式位移传感器通过测量拉绳的拉力来测量物体的位移。
当物体发生位移时,拉绳的长度改变,拉绳传感器可以将这种长度变化转化为电信号。
这些位移传感器的分类及原理是常见的,具体使用时需要根据实际需求选择适合的位移传感器。
每种传感器都有其特点和应用场景,如精度要求、工作环境、测量范围等。
高度选择合适类型的位移传感器可以提高测量的准确性和可靠性。
电感式位置传感器原理 -回复

电感式位置传感器原理-回复电感式位置传感器是一种常用的非接触式传感器,主要用于测量物体的位置或运动。
它基于电感效应,通过测量感应电感的变化来确定物体的位置。
下面将一步一步地介绍电感式位置传感器的原理。
首先,我们来了解一下电感效应。
电感效应是指当导体中的电流发生变化时,会产生一个电磁场。
这个电磁场的变化又会导致导体内部的电流发生变化。
简单来说,电流的变化会导致电磁场的变化,而电磁场的变化又会反过来影响电流。
根据法拉第电磁感应定律,这种变化会在导体上产生一电势差,即感应电动势。
电感式位置传感器利用电感效应进行测量。
它通常由一个电感线圈和一个金属物体(例如铁芯)组成。
当电感线圈通过电流时,会产生一个磁场。
当金属物体靠近电感线圈时,磁场会穿过金属物体,使得金属物体本身也成为一个电感器。
由于金属物体的电感量与其位置有关,因此可以通过测量金属物体感应电感的变化来确定物体的位置。
具体来说,电感式位置传感器的工作原理如下:第一步:电感线圈通电。
一般情况下,电感线圈接通一个交流电源,通过电流的变化来产生磁场。
第二步:磁场穿过金属物体。
由于金属物体具有导电特性,磁场能够通过它。
第三步:感应电感的变化。
当金属物体靠近或远离电感线圈时,磁场的强度和方向会发生变化,进而引起金属物体内部的感应电流的变化。
第四步:测量感应电感的变化。
使用一个感应电路测量电感线圈的电压,这个电压与金属物体感应电感的变化成正比。
第五步:确定物体位置。
通过对感应电压的测量,可以确定金属物体的位置或移动的方向和距离。
电感式位置传感器的原理很简单,但是实际应用中需要考虑一些因素。
例如,磁场的强度和方向变化的速度、距离等都会影响到感应电感的变化。
因此,在设计电感式位置传感器时,需要考虑这些因素,并进行合适的调整和校准。
此外,传感器的外部磁场也会对测量结果产生干扰,因此需要采取一些措施进行屏蔽或补偿。
总结起来,电感式位置传感器是一种基于电感效应的传感器,可用于测量物体的位置或运动。
位移传感器的工作原理
位移传感器的工作原理一、引言位移传感器是一种用于测量物体位置或者挪移的设备,广泛应用于工业自动化、机器人技术、汽车工程等领域。
本文将详细介绍位移传感器的工作原理。
二、工作原理位移传感器的工作原理基于不同的物理原理,常见的工作原理包括电阻式、电感式、电容式和光电式等。
1. 电阻式位移传感器电阻式位移传感器利用电阻值随位移变化的特性来测量位移。
一种常见的电阻式位移传感器是电位器。
电位器由一个可转动的电阻器和一个滑动电极组成。
当滑动电极沿电阻器挪移时,电阻值会发生变化。
通过测量电阻值的变化,可以确定位移的大小。
2. 电感式位移传感器电感式位移传感器利用电感值随位移变化的特性来测量位移。
一种常见的电感式位移传感器是线性变压器。
线性变压器由一个主线圈和一个副线圈组成,主线圈上通以交流电源,副线圈测量输出电压。
当物体位移时,副线圈中的感应电动势会发生变化,通过测量输出电压的变化,可以确定位移的大小。
3. 电容式位移传感器电容式位移传感器利用电容值随位移变化的特性来测量位移。
一种常见的电容式位移传感器是平行板电容器。
平行板电容器由两个平行的金属板和一个绝缘材料组成。
当物体位移时,两个金属板之间的距离会发生变化,从而导致电容值的变化。
通过测量电容值的变化,可以确定位移的大小。
4. 光电式位移传感器光电式位移传感器利用光电效应来测量位移。
一种常见的光电式位移传感器是光电编码器。
光电编码器由一个光源和一个光敏元件组成。
光源发出光线,光线照射到光敏元件上,当物体位移时,光敏元件接收到的光线强度会发生变化。
通过测量光线强度的变化,可以确定位移的大小。
三、应用领域位移传感器在工业自动化、机器人技术、汽车工程等领域有着广泛的应用。
1. 工业自动化位移传感器可用于测量机械设备的位置和挪移,实现自动化控制。
例如,在生产线上,位移传感器可以用来控制机械臂的位置,实现精确的操作。
2. 机器人技术位移传感器在机器人技术中起着关键作用。
位移传感器的工作原理
位移传感器的工作原理位移传感器是一种用于测量物体位置变化的装置,它通过转换物体的位移信息为电信号来实现测量。
在工业生产和科学研究中,位移传感器被广泛应用于各种测量和控制系统中。
位移传感器的工作原理基于不同的物理原理,常见的几种工作原理包括电容式、电感式、光电式和压阻式等。
下面将分别介绍这些工作原理及其应用。
1. 电容式位移传感器:电容式位移传感器利用电容变化来测量物体的位移。
当物体靠近或远离电容传感器时,物体与传感器之间的电容值会发生变化。
传感器通过测量电容值的变化来确定物体的位移。
电容式位移传感器具有高精度和快速响应的特点,广泛应用于精密测量领域,如机械加工、自动化控制和机器人技术等。
2. 电感式位移传感器:电感式位移传感器利用电感变化来测量物体的位移。
当物体靠近或远离电感传感器时,传感器的电感值会发生变化。
传感器通过测量电感值的变化来确定物体的位移。
电感式位移传感器具有高灵敏度和抗干扰能力强的特点,广泛应用于非接触式测量领域,如机器人导航、汽车制动系统和航空航天等。
3. 光电式位移传感器:光电式位移传感器利用光电效应来测量物体的位移。
传感器发射一束光线,当物体靠近或远离传感器时,光线被遮挡或反射的程度会发生变化。
传感器通过测量光线的变化来确定物体的位移。
光电式位移传感器具有高分辨率和快速响应的特点,广泛应用于自动化生产线、测距仪和光学仪器等。
4. 压阻式位移传感器:压阻式位移传感器利用电阻值的变化来测量物体的位移。
传感器包含有导电材料的弹性薄膜,当物体施加压力或位移时,薄膜的电阻值会发生变化。
传感器通过测量电阻值的变化来确定物体的位移。
压阻式位移传感器具有结构简单和成本低廉的特点,广泛应用于工业自动化、机械控制和医疗设备等。
综上所述,位移传感器的工作原理多种多样,每种原理都有其适用的场景和优势。
在实际应用中,根据具体的测量需求和环境条件选择合适的位移传感器是非常重要的。
随着科技的不断进步,位移传感器的精度和性能将会不断提高,为各行各业的测量和控制提供更加可靠和精确的解决方案。
位移传感器-(中英对照)
位移传感器位移传感器又称为线性传感器,它分为电感式位移传感器,电容式位移传感器,光电式位移传感器,位移传感器超声波式位移传感器,霍尔式位移传感器。
电感式位移传感器是一种属于金属感应的线性器件,接通电源后,在开关的感应面将产生一个交变磁场,当金属物体接近此感应面时,金属中则产生涡流而吸取了振荡器的能量,使振荡器输出幅度线性衰减,然后根据衰减量的变化来完成无接触检测物体的目的。
简介电感式位移传感器具有无滑动触点,工作时不受灰尘等非金属因素的影响,并且低功耗,长寿命,可使用在各种恶劣条件下。
位移传感器主要应用在自动化装备生产线对模拟量的智能控制。
位移是和物体的位置在运动过程中的移动有关的量,位移的测量方式所涉及的范围是相当广泛的。
小位移通常用应变式、电感式、差动变压器式、涡流式、霍尔传感器来检测,大的位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。
其中光栅传感器因具有易实现数字化、精度高(目前分辨率最高的可达到纳米级)、抗干扰能力强、没有人为读数误差、安装方便、使用可靠等优点,在机床加工、检测仪表等行业中得到日益广泛的应用。
原理计量光栅是利用光栅的莫尔条纹现象来测量位移的。
“莫尔”原出于法文Moire,意思是水波纹。
几百年前法国丝绸工人发现,当两层薄丝绸叠在一起时,将产生水波纹状花样;如果薄绸子相对运动,则花样也跟着移动,这种奇怪的花纹就是莫尔条纹。
一般来说,只要是有一定周期的曲线簇重叠起来,便会产生莫尔条纹。
计量光栅在实际应用上有透射光栅和反射光栅两种;按其作用原理又可分为辐射光栅和相位光栅;按其用途可分为直线光栅和圆光栅。
下面以透射光栅为例加以讨论。
透射光栅尺上均匀地刻有平行的刻线即栅线,a为刻线宽,b为两刻线之间缝宽,W=a+b称为光栅栅距。
目前国内常用的光栅每毫米刻成10、25、50、100、250条等线条。
光栅的横向莫尔条纹测位移,需要两块光栅。
一块光栅称为主光栅,它的大小与测量范围相一致;另一块是很小的一块,称为指示光栅。
位移传感器工作原理

位移传感器工作原理1. 引言位移传感器是一种广泛应用于工业领域的传感器,用于测量物体在空间中的位置变化。
它能够将物体的位移转化为电信号,从而实现对物体位移的精确测量。
本文将介绍位移传感器的工作原理以及常见的类型和应用。
2. 工作原理位移传感器的工作原理基于测量物体相对于参考点的位移或移动距离。
常见的位移传感器工作原理包括电阻式、电感式和光电式等。
2.1 电阻式位移传感器电阻式位移传感器是最常见的一种类型。
它通过测量物体位移时引起的电阻值变化来实现测量。
传感器由一个导电材料形成的电阻元件组成,通常是一条细长的导线。
当物体移动时,它会接触到导线上的电阻元件,改变导电材料的电阻值。
传感器测量这些电阻值的变化,并将其转化为输入电信号,进而实现位移测量。
2.2 电感式位移传感器电感式位移传感器利用物体位移时引起的电感值变化来进行测量。
它由一个线圈和一个心脏型铁芯组成。
当物体靠近或远离线圈时,线圈中的电感值会发生变化。
传感器检测并测量这些电感值的变化,并将其转化为位移信号。
2.3 光电式位移传感器光电式位移传感器是一种基于光学原理的传感器。
它使用光的传播特性来测量物体的位移。
传感器由一个发光二极管和一个接收器(如光敏电阻或光敏二极管)组成。
发光二极管发出光束,当物体位移时,光束会射到接收器上。
传感器测量接收到的光强度变化,并将其转化为位移信号。
3. 常见类型除了上述提到的电阻式、电感式和光电式位移传感器,还有一些其他常见的类型。
3.1 压电式位移传感器压电式位移传感器是一种利用压电效应进行测量的传感器。
当施加压力或力矩到压电器件上时,会产生电荷累积或电场变化,从而使得输出电信号与位移相关。
3.2 超声波位移传感器超声波位移传感器使用声波波束的传输和接收来测量物体的位移。
它通常由一个发射器和一个接收器组成。
发射器发出的声波波束射到物体上,并被接收器接收。
传感器测量声波的传播时间并计算出物体的位移。
4. 应用领域位移传感器在工业领域有着广泛的应用。
电感位移传感器原理

电感位移传感器原理电感位移传感器是一种常用的位移测量传感器,它利用电感的变化来实现对物体位移的测量。
在工业控制、自动化、机器人等领域广泛应用。
电感位移传感器的工作原理是基于电感量与线圈匝数、线圈面积、磁芯材料和磁场强度之间的关系。
当传感器与被测物体发生位移时,磁场的变化会导致线圈的电感量发生变化,进而产生电信号。
通过测量这个电信号的变化,就可以得到物体的位移信息。
具体来说,电感位移传感器通常由线圈和磁芯组成。
线圈中通以交流电源,产生交变磁场。
当被测物体靠近或远离传感器时,会改变磁场的分布,从而改变线圈的电感量。
这种变化可以通过传感器中的电路进行测量和处理,转换为与位移相关的电信号输出。
电感位移传感器具有许多优点。
首先,它的测量范围广泛,可以覆盖从微米到数米的位移范围。
其次,它具有较高的精度和稳定性,能够实现高精度的位移测量。
此外,电感位移传感器响应速度快,适用于高速运动的物体测量。
最后,它的结构简单、体积小巧,易于安装和集成到系统中。
电感位移传感器在实际应用中有多种类型。
其中,差动电感位移传感器是一种常见的类型。
它由两个线圈组成,一个作为发射线圈,另一个作为接收线圈。
发射线圈产生的磁场经过被测物体后,被接收线圈感应,产生电信号。
通过测量接收线圈的电信号,可以得到被测物体的位移信息。
电感位移传感器还可以根据线圈的结构和布局进行分类。
例如,单线圈电感位移传感器是一种简单的结构,线圈只有一个,适用于一维位移的测量。
而多线圈电感位移传感器则具有多个线圈,可以实现多维位移的测量。
除了上述常见的电感位移传感器,还有一些其他类型的电感位移传感器,如差分电感式传感器、电感谐振传感器等。
电感位移传感器是一种基于电感量变化来测量物体位移的传感器。
它具有测量范围广、精度高、响应速度快等优点,广泛应用于工业控制、自动化和机器人等领域。
随着科技的进步,电感位移传感器的性能将会不断提高,应用领域也会更加广泛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
恒流源向线圈双向充电的电感式位移传感器引言没有正弦信号激励,只采用开关方式测量电容值,可以测量的电容值在pF 以下[1-3]。
并用这种方法设计的电容式传感器也很多[4-6]。
其中有恒压信号向小电容充电的用法[6],这种用法最初出现在开关电容滤波电路中。
而电感值的测量及其电感式传感器,包括差动变压器仍在采用正弦信号激励的方式[7-12]。
有的电感式传感器在正弦激励的基础上引入开关方式,但在电路中仍然加电容与电感谐振[13-16]。
电感与电容在电磁场中关系紧密,在电路中是对偶关系[17]。
本文介绍采用开关电路以恒流源向电感线圈充电,只经过二极管放电来测量电感值的方法,采用双向充电来减少变差,实现了电感式位移量的测量。
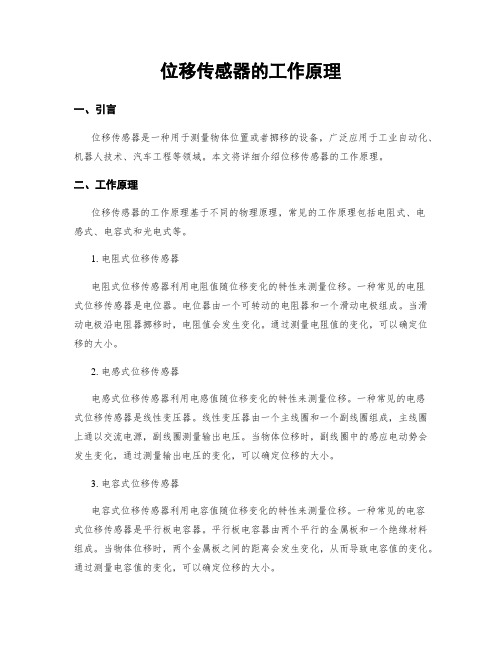
1 测量原理采用开关电路以恒流源电路向电感充电,只经过二极管放电的测量电感值的原理如图1所示,图中S 和D 构成互补开关,S 闭合时电流源I s 向被测电感充电,时间足够长使电感中的电流达到稳定值s i I =,而且有磁通链x s L I ψ=,L s u D C R I =⨯。
由于被测电感的性质,充电初期I s 是变的,I s 是恒流源电路,充电后期达到的平稳状态是恒流源性质,这样u L 是自由可变的。
S 断开时,电感中储存的磁通链对应的电动势经二极管D 放电,这时的电感电压是二极管D 的正向压降L D P u U =-,如果不考虑电压的符号,对应的电感电流从I 1下降到I 2所释放的磁通链为12()x D P D L I I U t ψ∆=-=⋅,所以有如下关系式12DP DU Lx t I I =- (1)其中t D 是二极管稳定正向导通的时间,当I s 一定时,I 1是确定的;当D 一定时,I 2也是确定的,并且要求放电电流线性下降,这用示波器可以看到。
D P U 、I 1和I 2为常数,则测量出t D 就可用电桥标定出电感值L x 。
过了这段时间,磁场能量不足以击穿D 的PN 结,而与结电容构成LC 阻尼振荡,直至磁场能量释放完毕。
适当的设置S 的开关周期和占空比保证充电时间足够长,以致充电达到稳定状态,只要放电时间大于t D 就可以用检测电路及单片机测量出t D ,再用式(1)计算出电感值L x 。
式(1)与电容充放电的电路存在对偶性质。
式(2)图1 测量电感值的原理图是电容值的计算公式[1],其中t ∆是电容电压从U 1下降到U r 的时间。
式(2)的恒流源电路I o 越小,可以测量的电容值就越小,对偶地对应式(1)是U D 越小,可以测量的电感值越小。
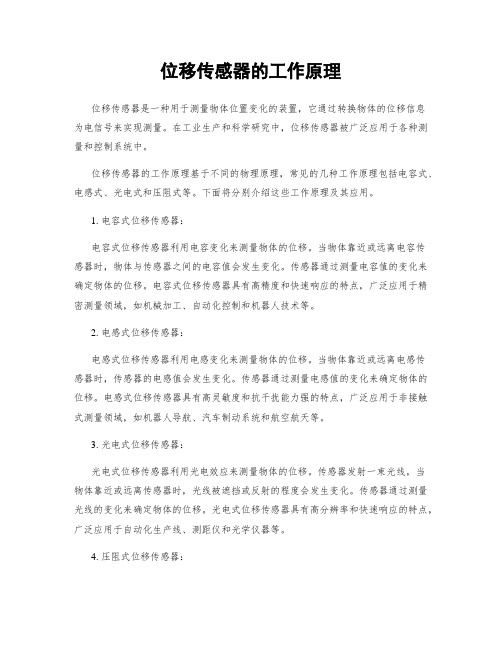
1o rI C tU U =∆- (2)2 恒流源双向充电测量电感器的电感值,只在几秒钟便完成,但要做成电感式传感器,其电感长期工作在一个方向的励磁,将会出现剩磁并影响传感器的性能,而且正行程与反行程的变差大。
如图2所示。
因而要采用双向充电的方式。
电路如图3所示,其中S1—S4构成对电感L x 的双向充放电的开关,开关逻辑如表1所示,其中E1和E2分别是输出信号u 1和u 2的输出使能,也就是在放u LI s DS图2 单向充电的变差电时才允许输出到单片机,以便测量二极管D2或D4的正向导通时间t D,该时间t D的长短表示电感值的大小。
与单方向时一样,要求充电时间足够长(长于电感电流i等于恒流源电流I s所需的时间)。
对2mH的图3 双向充放电测量电感值的电路原理电感,可以取500us的充电时间。
也就是表1中的4个工作状态,每个状态可以为500us。
每1ms取出一个测量值,采样频率仍然是1kHz。
表1 双向充电开关逻辑S4 S3 S2 S1 E1 E2 状态1 0 0 1 0 0 正向充电1 0 0 0 1 0 正向放电0 1 1 0 0 0 反相充电0 0 1 0 0 1 反相放电3测量电感值的试验电路双向充放电测量电感值的试验电路如图4所示。
恒流源I s为100mA,由Q1、R1—R4及其VR1构成。
Q11—Q14就是图2中的开关S1—S4,受uc1—uc3信号控制。
Q11和Q14导通时电感L x的电流从a到b充电。
Q13和Q12导通时电流从b到a充电。
放电用肖特基二极管,正向导通电压低,约为0.26—0.3V之间。
电感a端的电压u L1经IC11放大、IC12比较,在E1信号允许时,经IC13A到单片机,即输出信号u1o。
同样,电感b端的电压u L2经IC21放大、IC22比较,在E2信号允许时,经IC23A到单片机,即输出信号u2o。
单片机定时测量u1o和u2o的时间为读数N1和N2。
E1控制选择正向放电时的信号通过,E2控制选择反向放电时的信号通过。
运放用直流 12V电源供电,VR2设置门槛电压约为负的1.8—2.6V,门槛电压的设置与放电的肖特基二极管D12、D14的正向导通电压有关。
控制系统由LM3S3748芯片构成,按表1输出控制4个状态,每个状态500us。
定时测量u1o和u2o的低电平持续时间t D。
从显示屏上显示相应的定时计数值N=(N1+N2)/2,其中N1为正向放电时间计数值,N2为反向放电时间计数值。
试验中单片机的程序可以按需要随时修改算法或开关逻辑等。
按表1对应的开关Q11—Q14,uc1—uc4需要反相,即uc1—uc4为0时Q11—Q14导通,E1和E2则不需要反相。
把位移传感器的线圈作为电感放到图4中的L x位置,就可以通过测量其中的电感值来间接测量位移x。
图4 试验电路4测量位移量的试验设计测量位移量的试验设计,如图5所示。
自制线圈及骨架,线圈单层绕160匝,20mm长。
磁棒直径8mm 长30mm,用强力胶粘在千分尺的移动杆上。
磁棒与电感线圈有相对位移x,单位为mm。
位移量用千分尺测量,其精度为0.01mm。
磁棒位移量在线圈中向右侧移动,即磁棒朝远离线圈的方向移动时,电感减小,位移量x增大。
当接近线圈移动时,电感增加,位移量x减小。
坐标起点没有特别要求,只考虑位移与定时计数值N(即电感值)的变化关系。
测量位移x是用千分尺带动位移杆移动,从而移动磁棒。
该线圈用电桥(HIOKI 3532-50 LCR)设置1KHz 的频率测出基本参数,在x=0mm,电感值为1446uH,交流阻抗Z=12.55Ω,电容Cs=17.37uF,直流电阻Rs=8.58Ω。
每间隔1mm用电桥测位移点的电感值作为标准电感值,得到电感值与位移的关系曲线如图6所示图5 电感线圈与位移量的示意图当位移x=0—10000um时相应的电感值为1400---3000uH。
电感值Lx与定时计数值N的关系为Lx=0.12*N。
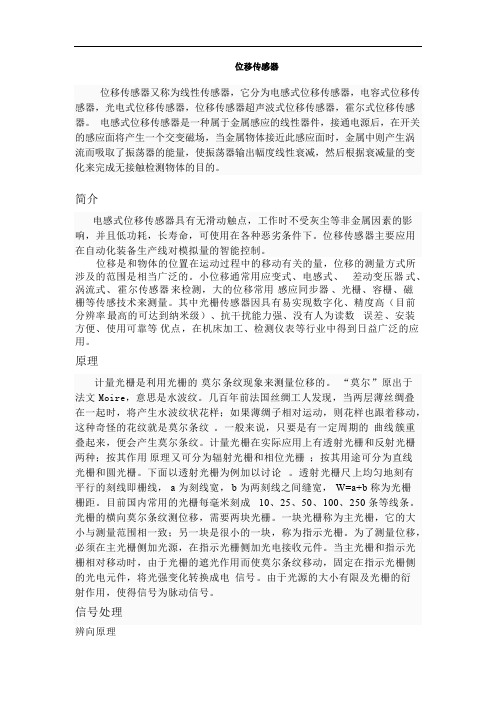
图 6 传感器线圈电感值与位移的关系曲线5试验数据分析将图5的电感线圈接到图4的被测电感L x 上,充 电恒流源为100mA ,双向充放电的4个状态时间各为500us ,测得位移x 与读数N 的数据如表2所示。
表2 位移x 与读数N 的数据x (um) 正行程N 反行程N x (um) 正行程N 反行程N 0 6991 7009 6000 3810 3825 1000 6443 6444 7000 3353 3385 2000 5910 5887 8000 2938 2966 3000 5356 5360 9000 2559 2583 4000481248321000022222240N =7000~2000对应的电感值范围约在1.0~0.2mH 。
把表2中的数据拟合成曲线,如图7所示。
从曲线看,正行程与反行程的变差与线性度比较起来,变差不是主要问题,主要问题是非线性,MA TLAB 计算出的最大线性度的偏差为218=∆N ,在高端会超过0.5mm 的位移量。
线性偏差太大,采用2阶曲线拟合。
即将表2的数据按N 为自变量找出N 与位移x 的2阶拟合曲线公式如下:16120*0428.3100*100*0764.1+-=N N N x其中:N 的单位为20ns ,x 的单位为)(m μ。
图7 位移量与读数N 的线性分析将该公式放到单片机中得到最后的测试数据,如表3所示。
为了计算方便,单位均为um ,试验用的千分尺精度是10um 的,只能确定绝对误差大于10um 的结果。
从数据看,最大的绝对误差为-137um ,满量程为10mm ,所以相对百分误差好于2%。
重复性误差、变差等都远小于这个绝对误差。
图8为表3中绝对误差数据的连线图,可以看出非线性带来的误差是不均匀的。
正负误差分布比较合适。
表3 拟合读数与位移x 的数据读数x (um )位移x (um )绝对误差 N (20ns ) 72 0 +72 7015 949 1000 -51 6464 1863 2000 -137 **** **** 3000 -123 5374 3936 4000 -64 4829 5000 5000 0 4313 6058 6000 +58 3824 7098 7000 +98 3366 8083 8000 +83 2949 90139000 +13 2569 986810000-1322231图8 绝对误差曲线6结论采用开关电路以恒流源向电感充电只经过二极管放电,并用ARM单片机定时测量稳定放电的时间t D来测量电感值。
采用双向充电,减少了剩磁对传感器测量性能的影响和减少了变差,提高了测量数值的稳定性,用这个测量电感值的方法设计电感式位移传感器,可以测量电感值来间接地测量位移量。
通过数据分析和二阶曲线拟合,当满量程为10mm时,相对百分误差为2%。
通过试验说明这个方法可以用来设计电感式位移传感器。
由于这个方法可以不用高频正弦激励,而且可以测量较小的电感值,因而设计传感器时可以减小线圈和考虑不同的结构。
参考文献:[1]佘生能,孙士平.电容传感器新型电容测量电路设计[J].中国测试技术,2005,31(5):42-43[2]刘浪,马铁华,李新娥..基于TDC的微小电容测量电路的设计[J].测控技术与仪器仪表,2010(1):71-75[3]Chia-Liang Lin, Union City. Error Canceling ComparatorBased Switch Capacitor Circuit and Method Thereof[p].United States Patent. Patent No.:US7450041 B2. 2008. [4]王斌,黄晓冬.一种微电容式传感器检测电路的分析与改进[J].传感技术学报,2008(2): 65-68[5]周利明,张小超,苑严伟.小麦播种机电容式排种量传感器设计[J].农业工程学报,2010,26(10):99-103[6]房慧敏,朱伯申,李东光. 基于开关电容技术的一种电容式传感器测量电路[j]. 电测与仪表,2005,42(2):24-28 [7]Mishra,S.K. A Novel Method of Extending the LinearityRange of Linear Variable Differential Transformer Using Artificial Neural Network[J]. Instrumentation andMeasurement, IEEE. 2010(4): 947-953[8]Masi,A. Study of magnetic interference on a LVDT prototype.Instrumentation and Measurement Technology Conference (I2MTC) [R], IEEE 3-6. 2010(5): 219-223[9]Martine,M. Design of a Linear Variable DifferentialTransformer With High Rejection to External Interfering Magnetic Field[J]. Magnetics, IEEE. 2010(2):674-677 [10]庞喜浪,刘刚,文通.用于磁轴承位移检测的数字式电涡流位移传感器设计与实验研究[J].传感技术学报, 2011,24(3):360-364[11]罗承刚.电涡流位移传感器线圈电磁场仿真分析[J],传感器与微系统,2008,27(3):24-26[12]金超武,徐龙祥,丁嵩..非导磁金属隔层对差动变压器式位移传感器的影响[J].传感技术学报,2011(1):30—35[13]Mitsuo Tada,Y asunari Suto(JP). Eddy Current Sensor [P].United States Patent. US7508201B2. 2009[14]Jeong-Yean Yang. Electric Inductance Sensor-based PathRecognition for the Highly Configurable Path Tracking of Service Robot[C]. Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication, Technische Universitat Munich, Germany, 2008(8): 1-3[15]Patrick Mawet. Inductive Transducer Measurement System[P]. United States Patent. US 7323863B2. 2008[16]Hans Ulrich Meyer. Pulsed Coil Drive Circuit for ASampled Inductive transducer [P]. United States Patent.US7880462B2, 2011[17]Jai P.Agrawal.Power Electronic Systems Theory andDesign[M]. Prentice-Hall Inc,2001:12-14 and 47-50。