无刷直流电机专用控制集成电路MC33035的原理及应用
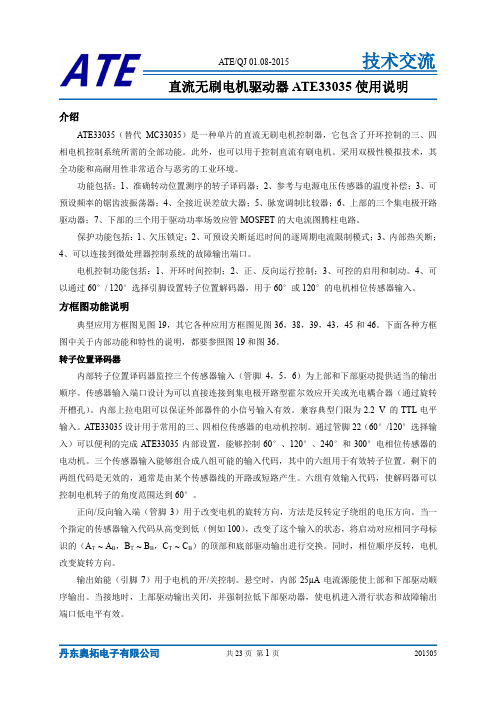
MC33035内部电路图

产品说明MC33035是高性能第二代单片无刷直流马达控制电路。
它包含实现开环、三相或四相马达控制所需的全部功能。
此电路包括转子位子检测器,温度补偿基准,锯齿波振荡器,三个集电极开路的高速驱动器,和三个高电流的图腾柱低速驱动器,适用于驱动功率MOSFET 管。
此控制器还包含一些有保护特点的电路,如欠电压锁定,时间延迟可选的周期接周期限流控制,内部过热保护电路和一个独特的故障输出,易于和微控制系统连接。
典型的马达控制功能包括开环速率,前进/后退方向,运行使能和动态制动。
MC33035是专门为电气相位为60°/300°或120°/240°的马达电路设计的,并能有效的控制无刷直流马达。
DIP-24SOP-24• 10 ~ 30 V 工作电压 • 欠电压锁定• 6.25 V 基准传感器工作电源 • 闭环伺服应用中的误差放大器• 高电流驱动,可控制外部三相MOSFET 电桥• 周期接周期限流控制 • 管脚输出的电流感应基准 • 内部过热保护电路• 60°/300°或120°/240°传感器相位可选 • 通过外部MOSFET 电桥可有效控制产品归类产品型号工作温度封装MC33035DW SOP–24 MC33035PTA =-40° to +85°CDIP-24管脚连接低速驱动输出传感器输入/PWN 输入°选择典型原理图此器件包含了285个有效的晶体管。
极限参数参数符号范围单位电源电压VCC 40 V数字输入(管脚3, 4, 5, 6, 22, 23) – VrefV 振荡器输入电流(源电流或陷电流)IOSC 30 mA 误差放大器输入电压范围(管脚 11, 12,注1)VIR –0.3 ~ Vref V误差放大器输出电流(源电流或陷电流,注2)IOut 10 mA 电流检测输入电压(管脚9,15)VSense –0.3~5.0V故障输出电压VCE(Fault) 20 V故障输出陷电流ISink(Fault) 20 mA高速驱动电压(管脚1, 2, 24) VCE(top) 40 V高速驱动陷电流(管脚1, 2, 24) ISink(top) 50 mA低速驱动工作电压(管脚 18) VC 30V 低速驱动输出电流(源电流或陷电流,管脚19, 20, 21)IDRV 100 mA 功率消耗和热特性DIP-24最大功耗@ TA = 85°C 过热电阻,结对空SOP-24最大功耗@ TA = 85°C 热敏电阻,结对空电阻PDRθJAPDRθJA86775650100mW°C/WmW°C/W工作结温TJ 150°C环境温度TA –40 ~ +85 °C贮存温度Tstg –65~+150°C电气特性(除非特别制定,否则VCC = VC = 20 V, RT = 4.7 k, CT = 10 nF, TA = 25°C)参数符号最小值典型值最大值单位基准部分基准输出电压(Iref = 1.0 mA) TA = 25°CTA = –40°~ +85°C Vref5.95.826.24–6.56.57V线路调整(VCC = 10~30 V, Iref = 1.0mA)Regline -- 1.5 30 mV负载调整(Iref = 1.0~20 mA) Regload -- 16 30 mV输出短路电流(注 3) ISC 40 75 – mA基准欠电压锁定阈值 Vth4.04.55.0V误差放大器输入偏移电压(TA = –40° ~ +85°C) VIO -- 0.4 10 mV输入偏移电流(TA = –40°∼+85°C) IIO -- 8.0 500 nA输入偏置电流(TA = –40° ~ +85°C) IIB -- -46 -1000 nA输入共模电压VICR (0 V ~ Vref) V开环电压增益(VO = 3.0 V, RL = 15 k) AVOL 70 80 -- dB输入共模抑制比 CMRR5586--dB 电源抑制比(VCC = VC = 10 to 30 V) PSRR 65 105 -- dB输出电压摆浮高电平状态(RL = 15 k to Gnd) 低电平状态(RL = 15 k to Vref)VOHVOL4.6–5.30.5–1.0V振荡单元振荡频率 fOSC222528kHz 频率随电压改变(VCC = 10~30 V) ∆fOSC/∆V – 0.01 5.0 %锯齿波峰值电压 VOSC(P)–4.14.5V锯齿波谷值电压 VOSC(V)1.21.5–V逻辑输入输入阈值电压(管脚3, 4, 5, 6, 7, 22, 23)高电平状态低电平状态VIHVIL3.0--2.21.7--0.8V传感器输入(管脚4, 5, 6)高电平输入电流(VIH = 5.0 V) 低电平输入电流(VIL = 0 V)IIHIIL-150-600-70-337-20-150µA前进/后退,60°/120°可选(管脚3, 22, 23)高电平输入电流(VIH = 5.0 V) IIHIIL-75-300-36-175-10-75µA低电平输入电流(VIL = 0 V)输出使能高电平状态输入电流(VIH = 5.0 V) 低电平状态输入电流VIL =0V IIHIIL-60-60-29-29-10-10µA限流比较仪阈值电压 Vth85101115mV 输入共模电压 VICR--3.0--V输入偏置电流 IIB---0.9-5.0µA输出和电源单元高速驱动输出饱和陷电压(Isink = 25 mA) -- 0.51.5 V高速驱动输出关闭状态漏电流(VCE = 30 V) -- 0.06100 µA高速驱动输出转换时间(CL = 47 pF, RL = 1.0 k)上升时间下降时间trtf––10726300300ns低速驱动输出电压高电平状态(VCC = 20 V, VC = 30 V, Isource = 50 mA)低电平状态(VCC =20V, VC = 30V, Isink = 50 mA) VOHVOL(VCC-2.0)--(VCC-1.1)1.5--2.0V故障输出饱和陷电压(Isink = 16 mA) VCE(sat) -- 225 500 mV 故障输出关闭状态漏电流(VCE = 20 V)IFLT(leak) -- 1.0 100 µA欠电压锁定驱动输出允许 (VCC 或VC 增加)滞后Vth(on)VH8.20.18.90.2100.3V电源电流管脚17 (VCC = VC = 20 V)管脚17 ( VCC = 20 V, VC = 30 V) 管脚18 ( VCC = VC = 20 V)管脚18 (VCC = 20 V, VC = 30 V) ICCIC--------12143.55.01620 06.010mA注: 1.输入共模电压或输入信号电压不能低于-0.3V。
直流无刷电机驱动器ATE33035(MC33035)使用说明
直流无刷电机驱动器ATE33035使用说明介绍ATE33035(替代MC33035)是一种单片的直流无刷电机控制器,它包含了开环控制的三、四相电机控制系统所需的全部功能。
此外,也可以用于控制直流有刷电机。
采用双极性模拟技术,其全功能和高耐用性非常适合与恶劣的工业环境。
功能包括:1、准确转动位置测序的转子译码器;2、参考与电源电压传感器的温度补偿;3、可预设频率的锯齿波振荡器;4、全接近误差放大器;5、脉宽调制比较器;6、上部的三个集电极开路驱动器;7、下部的三个用于驱动功率场效应管MOSFET的大电流图腾柱电路。
保护功能包括:1、欠压锁定;2、可预设关断延迟时间的逐周期电流限制模式;3、内部热关断;4、可以连接到微处理器控制系统的故障输出端口。
电机控制功能包括:1、开环时间控制;2、正、反向运行控制;3、可控的启用和制动。
4、可以通过60°/ 120°选择引脚设置转子位置解码器,用于60°或120°的电机相位传感器输入。
方框图功能说明典型应用方框图见图19,其它各种应用方框图见图36,38,39,43,45和46。
下面各种方框图中关于内部功能和特性的说明,都要参照图19和图36。
转子位置译码器内部转子位置译码器监控三个传感器输入(管脚4,5,6)为上部和下部驱动提供适当的输出顺序。
传感器输入端口设计为可以直接连接到集电极开路型霍尔效应开关或光电耦合器(通过旋转开槽孔)。
内部上拉电阻可以保证外部器件的小信号输入有效。
兼容典型门限为2.2 V 的TTL电平输入。
ATE33035设计用于常用的三、四相位传感器的电动机控制。
通过管脚22(60°/120°选择输入)可以便利的完成A TE33035内部设置,能够控制60°、120°、240°和300°电相位传感器的电动机。
三个传感器输入能够组合成八组可能的输入代码,其中的六组用于有效转子位置。
MC33035芯片对无刷直流电机驱动系统设计

MC33035芯片对无刷直流电机驱动系统设计
一、无刷直流电机控制设计
二、无刷直流电机驱动电路设计
在选择功率管时,需要考虑电机的驱动需求和电机的特性。
通常选择
耐压高、开关速度快的功率管,以提高电机的性能和驱动效率。
功率管驱动电路设计要保证稳定、快速的开关过程。
可使用反相器、
驱动电流放大器等电路来实现功率管的驱动。
此外,还需要考虑驱动电路
的功率损耗和保护电路,以提高系统的可靠性。
三、无刷直流电机驱动系统通信接口设计
在通信接口设计中,需要考虑通信协议和数据传输速率等方面的设计。
通信协议可选择SPI、I2C等,要根据系统的要求和外部设备的兼容性进
行选择。
数据传输速率应根据系统的实时性要求和通信距离等因素进行优化。
根据实际情况选择合适的传输速率,以保证系统的性能和稳定性。
四、无刷直流电机驱动系统保护设计
无刷直流电机驱动系统中应包含一些保护功能,以避免电机和驱动器
的损坏。
常见的保护功能包括过压保护、过流保护、过热保护等。
过压保护可通过采用过压检测电路来实现,一旦检测到过压情况,即
可切断电机的电源,保护电机和驱动器的安全。
过流保护可通过电流检测电路来实现,一旦检测到过流情况,即可切
断电机的电源或降低电机的功率输出。
过热保护可通过温度传感器来实现,一旦检测到电机或驱动器温度过高,即可切断电机的电源或降低电机的功率输出。
无刷直流电动机专用控制集成电路MC33035的应用
Vc c Vc
l 4
l 5 l 6 l 7 l 8 1 2 21 9, 0,
2 2
—
—
—
—
具 有 温度 补偿 的 6 2 V内部 基 准 电源 ; .4 R 、 变锯齿 波 振荡 电路 ; Tc 可 脉 宽 调制 比较 器 ;
Ke od : r hesD oo; us i oua rP yw r sBu ls Cm t P l wd m d lt ( WM)Eet ncvl t s r e e o ; l r i e me r co o e
中图 分类 号 :M3 文献 标识 码 : 文章 编 号 :5 3— 75 2 0 )9—0 1 T 3 B 16 4 9 (0 2 0 0 4—0 3
—
—
欠压 、 过热保护 以及故障电平输出。
2 3 引脚 功 能 .
参 见 表 1 。
表 1 M 3 0 5的 引脚 功 能 C33
引脚号
1, 2 2, 4
侧 半桥 输 出 P WM 对 电机进 行 调速 。
引 脚 符 号 与 功 能
B, , T AT CT
备
注
2 MC 3 3 30 5的功 能和组成
误 差放 大 器 ; 输 出驱 动 电路 ;
—
—
芯片供 电电源 (O I V一3 V) 0 给下桥驱动输 出提供 电源 ( O I V~3 V) 0 下桥三端驱动输 出 高电平选 择传感器相位差 6 。 0 ,低电平选 择传感器 相位差 10 2。 高 电平使 电机正常运行 , 低电平使电机制 动减 速
关键 词 : 无刷 直流 电机 ; 宽调 制 器 ; 脉 电子 测速 器
无刷直流电机专用控制集成电路MC33035的原理及应用
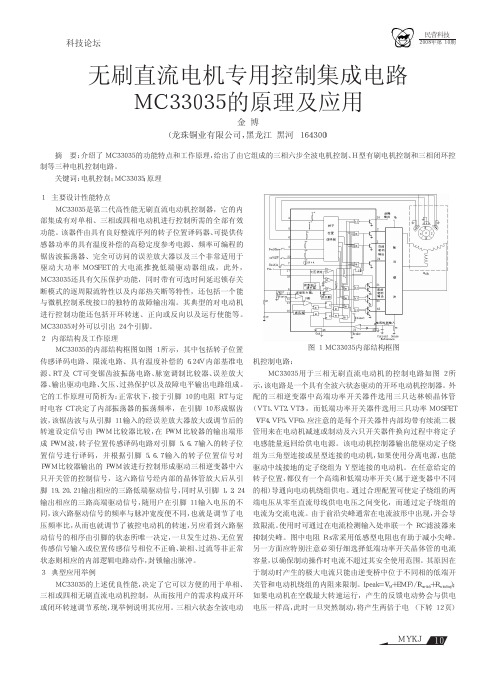
它的工作原理可简析为:正常状下,接于引脚 10 的电阻 RT 与定 配的三相逆变器中高端功率开关器件选用三只达林顿晶体管
时电容 CT 决定了内部振荡器的振荡频率,在引脚 10 形成锯齿 (VT1、VT2、VT3),而低端功率开关器件选用三只功率 MOSFET
波,该锯齿波与从引脚 11 输入的经误差放大器放大或调节后的 (VF4、VF5、VF6)。应注意的是每个开关器件内部均带有续流二极
发展规划,找出本企业在投入、产出方面存在的问题,并参考给
1806.
出的模型计算结果和投影结果增加或减少相关的投资,也可以 [3] 毛世平.技术效率理论及其测度方法[J].农业技术经济,1998
利用给出的方法,计算未讨论的投入、产出指标配置是否合理, (3):37- 41.
计算出合理的指标值,研究提高本企业技术效率的对策和措施, [4] 王丽,魏煜.企业效率研究方法比较[J].预测,1999(5):76- 79.
或闭环转速调节系统,现举例说明其应用。三相六状态全波电动 电压一样高,此时一旦突然制动,将产生两倍于电 (下转 12 页)
MYKJ 10
科技论坛
民营科技 2008 年第 10 期
角股钢丝绳,钢丝绳直径 Φ18mm,钢丝直径 Φ0.95mm,钢丝绳单 Φ1600mm 天轮,其直径也符合《金属非金属矿山安全规程》的要
900mm 的绞车在卷筒直径和宽度上都可满足需要。天轮采用
化管理委员.金属非金属矿山安全规程[S].2006.
(上接 10 页) 动机正常电流的极大电流,这一点尤其应当注 意。
图 2 三相六步全波电机控制电路图 另一方面,转子位置检测信号还被送入 MC33039 经 F/V 转 换,得到一个频率与电机转速成正比的脉冲信号,该信号通过简 单的阻容网络滤波后形成转速反馈信号。利用 MC33035 中的误 差放大器可构成一个简单的 P 调节器,实现电机转速的闭环控
基于MC33035的无刷直流电机控制器
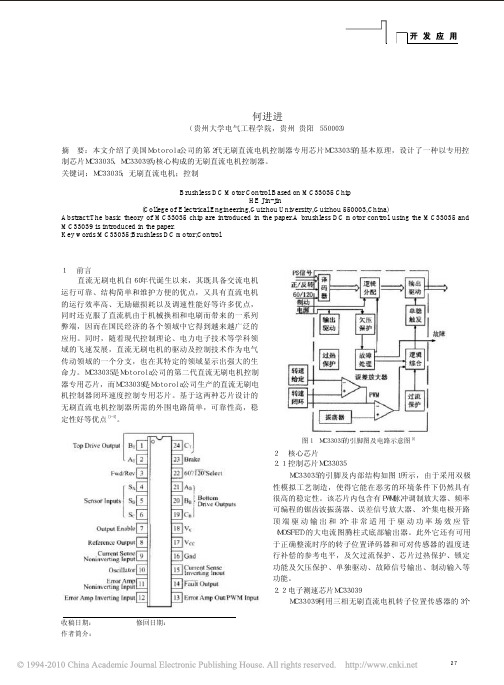
开 发 应 用基于MC33035的无刷直流电机控制器何进进(贵州大学电气工程学院,贵州 贵阳 550003) 摘 要:本文介绍了美国Motorola公司的第2代无刷直流电机控制器专用芯片MC33035的基本原理,设计了一种以专用控 制芯片MC33035、MC33039为核心构成的无刷直流电机控制器。
关键词:MC33035;无刷直流电机;控制 Brushless DC Motor Control Based on MC33035 Chip HE Jin-jin (College of Electrical Engineering,Guizhou University,Guizhou 550003,China) Abstract:The basic theory of MC33035 chip are introduced in the paper.A brushless DC motor control using the MC33035 and MC33039 is introduced in the paper. Key words:MC33035;Brushless DC motor;Control1前言 直流无刷电机自60年代诞生以来,其既具备交流电机运行可靠、结构简单和维护方便的优点,又具有直流电机 的运行效率高、无励磁损耗以及调速性能好等许多优点, 同时还克服了直流机由于机械换相和电刷而带来的一系列 弊端,因而在国民经济的各个领域中它得到越来越广泛的 应用。
同时,随着现代控制理论、电力电子技术等学科领 域的飞速发展,直流无刷电机的驱动及控制技术作为电气 传动领域的一个分支,也在其特定的领域显示出强大的生 命力。
MC33035是Motorola公司的第二代直流无刷电机控制 器专用芯片,而MC33039是Motorola公司生产的直流无刷电 机控制器闭环速度控制专用芯片。
基于这两种芯片设计的 无刷直流电机控制器所需的外围电路简单,可靠性高,稳 定性好等优点[1-2]。
直流无刷电机工作原理与控制方法ATE33035(MC33035)

直流无刷电机工作原理与控制方法用A TE33035(替代MC33035)可以很方便的控制直流无刷电机。
直流无刷电机既具有交流电机的结构简单、运行可靠、维护方便等优点,又具备直流电机的运行效率高、无励磁损耗以及调速性能好等优点。
由于传统的直流电机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等缺点。
随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM 等相继出现,以及高性能永磁材料的问世,均为直流无刷电机的广泛应用奠定了坚实的基础。
直流无刷永磁电机的基本组成:主要由电机本体、位置传感器和电子开关电路三部分组成。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(p=2,4,…)组成。
图1. 三相两极直流无刷电机组成三相定子绕组分别连接到电子开关线路中相应的功率开关器件,A、B、C相绕组分别与功率开关管V1、V2、V3相接。
位置传感器跟踪与电机转子转轴相连接的部件。
此处采用光电器件作为位置传感器,以三只功率晶体管V1、V2和V3构成功率逻辑单元。
三只光电器件VP1、VP2和VP3的安装位置各相差120度,均匀分布在电动机一端。
借助安装在电机轴上的旋转遮光板的作用,使从光源射来的光线依次照射在各个光电器件上,并依照某一光电器件是否被照射到光线来判断转子磁极的位置。
常见的位置传感器有以下几种:电磁式位置传感器、光电式位置传感器、磁敏式位置接近传感器。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各项绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
图2. 各相绕组的导通示意图三相永磁无刷直流电机转子位置传感器输出信号VP1、VP2、VP3在每360 电角度内给出了6个代码,按其顺序排列,6个代码是101、100、110、010、011、001。
MC33035

MC33035是MOTOROLA公司第二代无刷直流电动机控制专用集成电路,外接功率开关器件和电子测速器MC33039,可构成闭环调速系统来控制三相(全波或半波)、两相或四相无刷直流电机。
它通过下侧半桥输出PWM对电机进行调速。
2MC33035的功能和组成2.1功能——可控制电机正反转;——实现电机刹车制动;——启停功能;——可选择三相无刷直流电机传感器相位差60°或120°;——欠压封锁保护,IC过热保护和故障输出。
2.2组成——转子位置传感器译码电路;——限流电路;——具有温度补偿的6.24V内部基准电源;——RT、CT可变锯齿波振荡电路;——脉宽调制比较器;——误差放大器;——输出驱动电路;——欠压、过热保护以及故障电平输出。
2.3引脚功能参见表1。
表 1 MC33035的引脚功能3MC33035的应用图1是MC33035与MC33039构成的闭环三相无刷直流电机控制电路图。
其电路各部分功能介绍:1)脚4、5、6是传感器位置信号输入,MC33035通过对输入位置信号译码对应输出驱动电机。
这三个信号与TTL电平兼容。
当输入全“0”或“1”表示非法信号。
故障输出端(引脚14)输出有效低电平。
通过选择引脚22来确定输入三相信号相位差为60°还是120°。
2)阻容RT、CT与内部振荡器产生锯齿波,作为PWM载波信号。
锯齿波幅值为1.5V~4.1V。
为防止噪声干扰,载波频率不宜过低,但频率太高容易使功率管过热,建议载波频率为20kHz~30kHz。
锯齿波是由引脚8输出6.24V参考电压经RT对CT充电,通过内部电路放电所产生。
由引脚11给定速度电压以及来自MC33039引脚5的速度方波信号经积分形成斩波信号与锯齿波形成PWM,参见图2,CT、误差输出PWM、内部锁存、上桥、下桥、错误信号对应时间关系如图3。
构成闭环的主要原理是当负载改变(如变大),则电机速度下降,测速器MC33039引脚5输出方波密度变低,此信号经积分形成斩波信号后幅值抬高,则使输出PWM占空比加大,输出电流增加,自然速度逐渐提高,以达到输出跟踪输入。
主控芯片MC33035

主控芯片MC330352009-08-29 19:35无刷控制器工作原理:无刷直流电机中的位置传感器检测转子磁场相对于定子绕组的位置,并输出霍尔信号到MC33035,使主控芯片MC33035在确定的相对位置上输出六路控制信号,控制信号通过IR2103缓存,控制功率管在转子的适当位置导通或截止,从而控制各电枢绕组的电流,随着转子的位置改变按一定的顺序进行换流,从而保证每个磁极下电流方向不变,实现了没有电刷的无接触式换向。
当刹车、欠压、过流发生时,MC33035的第七脚电压由高变低,封锁输出,电机停转。
整流二极管,快恢复二极管等。
无刷控制器主要元件1)电阻:在电路中起降压和分流作用,用R表示。
2)电容:在电路中起滤波作用,用C表示。
3)二极管:具有单向导电性,正向测有数值,反向测为无穷大,常用的有稳压二极管,开关二极管,4)三极管:在电路中起电流放大的作用,主要有7815、7805、9013等。
5)场效应晶体管:功率管为RFP50N06。
6)集成电路6.1)MC33035无刷直流电机控制器主控芯片。
6.1.1)MC33035主控芯片各脚功能。
6.1.2)1、2、24脚驱动上功率管,19、20、21脚驱动下功率管。
6.1.3)第3脚控制电机正反转。
6.1.4)第4、5、6脚为电机霍尔信号输入,电压为6.25V。
6.1.5)第7脚决定MC33035的状态,处于高电平时有输出。
过流,刹车,欠压时第7脚处于低电平状态,封锁输出。
6.1.6)第8脚为参考电压,输出6.25V。
6.1.7)第9脚接地。
6.1.8)第10脚振荡器,产生PWM波,由第8脚提供电压。
6.1.9)第11脚调速信号输入,1.0-4.2或4.8V。
6.1.10)第11、12、13脚相连,11、12内部连,12、13外部连。
6.1.11)第14、15、16脚接地。
6.1.12)第17脚为工作电压24V由7824提供或工作电压为15V。
6.1.13)第18脚为15V电压。
mc33035
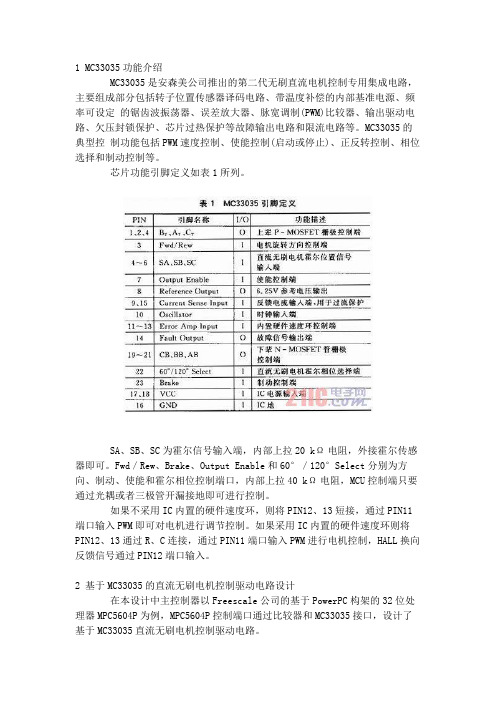
1 MC33035功能介绍MC33035是安森美公司推出的第二代无刷直流电机控制专用集成电路,主要组成部分包括转子位置传感器译码电路、带温度补偿的内部基准电源、频率可设定的锯齿波振荡器、误差放大器、脉宽调制(PWM)比较器、输出驱动电路、欠压封锁保护、芯片过热保护等故障输出电路和限流电路等。
MC33035的典型控制功能包括PWM速度控制、使能控制(启动或停止)、正反转控制、相位选择和制动控制等。
芯片功能引脚定义如表1所列。
SA、SB、SC为霍尔信号输入端,内部上拉20 kΩ电阻,外接霍尔传感器即可。
Fwd/Rew、Brake、Output Enable和60°/120°Select分别为方向、制动、使能和霍尔相位控制端口,内部上拉40 kΩ电阻,MCU控制端只要通过光耦或者三极管开漏接地即可进行控制。
如果不采用IC内置的硬件速度环,则将PIN12、13短接,通过PIN11端口输入PWM即可对电机进行调节控制。
如果采用IC内置的硬件速度环则将PIN12、13通过R、C连接,通过PIN11端口输入PWM进行电机控制,HALL换向反馈信号通过PIN12端口输入。
2 基于MC33035的直流无刷电机控制驱动电路设计在本设计中主控制器以Freescale公司的基于PowerPC构架的32位处理器MPC5604P为例,MPC5604P控制端口通过比较器和MC33035接口,设计了基于MC33035直流无刷电机控制驱动电路。
传统的直流无刷电机控制驱动电路采用MPC5604P、预驱动IC和MOSFET 实现,其中包括电压泵即自举电路。
本设计是基于直流无刷电机控制芯片MC33035实现的,MC33035实现预驱动和电子自动换向功能,采用MC33035实现直流无刷电机的控制驱动电路,既简化了电路设计,同时也减轻了MPC5604P 的运算量。
MPC5604P和MC33035之间通过光耦或者比较器实现电平转换。
MC33035资料

MC33035, NCV33035 Brushless DCMotor ControllerThe MC33035 is a high performance second generation monolithic brushless DC motor controller containing all of the active functions required to implement a full featured open loop, three or four phase motor control system. This device consists of a rotor position decoder for proper commutation sequencing, temperature compensated reference capable of supplying sensor power, frequency programmable sawtooth oscillator, three open collector top drivers, and three high current totem pole bottom drivers ideally suited for driving power MOSFETs.Also included are protective features consisting of undervoltage lockout, cycle−by−cycle current limiting with a selectable time delayed latched shutdown mode, internal thermal shutdown, and a unique fault output that can be interfaced into microprocessor controlled systems.Typical motor control functions include open loop speed, forward or reverse direction, run enable, and dynamic braking. The MC33035 is designed to operate with electrical sensor phasings of 60°/300° or 120°/240°, and can also efficiently control brush DC motors. Features•10 to 30 V Operation•Undervoltage Lockout•6.25 V Reference Capable of Supplying Sensor Power•Fully Accessible Error Amplifier for Closed Loop Servo Applications•High Current Drivers Can Control External 3−Phase MOSFET Bridge•Cycle−By−Cycle Current Limiting•Pinned−Out Current Sense Reference•Internal Thermal Shutdown•Selectable 60°/300° or 120°/240° Sensor Phasings•Can Efficiently Control Brush DC Motors with External MOSFET H−Bridge•NCV Prefix for Automotive and Other Applications Requiring Site and Control Changes•Pb−Free Packages are Available241P SUFFIXPLASTIC PACKAGECASE 724DW SUFFIXPLASTIC PACKAGECASE 751E(SO−24L)See detailed ordering and shipping information in the package dimensions section on page 27 of this data sheet.ORDERING INFORMATIONSee general marking information in the device marking section on page 27 of this data sheet.DEVICE MARKING INFORMATIONRepresentative Schematic DiagramThis device contains 285 active transistors.1.The input common mode voltage or input signal voltage should not be allowed to go negative by more than 0.3 V.2.The compliance voltage must not exceed the range of −0.3 to V ref.3.NCV33035: T low = −40°C, T high = 125°C. Guaranteed by design. NCV prefix is for automotive and other applications requiring site and changecontrol.4.MC33035: T A = −40°C to +85°C; NCV33035: T A = −40°C to +125°C.5.Maximum package power dissipation limits must be observed.ERROR AMPLIFIER Output Voltage SwingHigh State (R L = 15 k to Gnd) Low State (R L = 15 k to V ref)V OHV OL4.6−5.30.5−1.0VV s a t , O U T P U T S A T U R A T I O N V O L T A G E (V )5.0 µs/DIVA V = +1.0No Load T A = 25°C, O U T P U T V O L T A G E (V )O 4.53.01.51.0 µs/DIVA V = +1.0No Load T A = 25°C3.053.02.95I O , OUTPUT LOAD CURRENT (mA)f, FREQUENCY (Hz)562202001801601401201008060−−16−08.0162432404840240A V O L , O P E N L O O P V O L T A G E G A I N (d B )E X C E S S P H A S E (D E G R E E S ),φT A , AMBIENT TEMPERATURE (°C)−55−4.0−2.02.01254.01007550250−25f O S C O S C I L L A T O R F R E Q U E N C Y C H A N G E (%),∆1001.0R T , TIMING RESISTOR (k Ω)100010010010f O S C O S C I L L A T O R F R E Q U E N C Y (k H z ),Figure 1. Oscillator Frequency versusTiming Resistor Figure 2. Oscillator Frequency Changeversus TemperatureFigure 3. Error Amp Open Loop Gain andPhase versus Frequency Figure 4. Error Amp Output SaturationVoltage versus Load CurrentFigure 5. Error Amp Small−SignalTransient Response Figure 6. Error Amp Large−SignalTransient Response1.02.00− 0.8−1.61.60.8 5.04.03.00V , O U T P U T V O L T A G E (V )O VI Sink , SINK CURRENT (mA)0−40−20−4020, N O R M A L I Z E D R E F E R E N C E V O L T A G E C H A N G E (m V )∆V r e f 0−−−−− 12− 16V r e f , R E F E R E N C E O U T P U T V O L T A G E C H A N G E (m V )∆Figure 11. Bottom Drive Response Time versusCurrent Sense Input Voltage Figure 12. Fault Output Saturationversus Sink Current0CURRENT SENSE INPUT VOLTAGE (NORMALIZED TO V th )50100150200250t H L , B O T T O M D R I V E R E S P O N S E T I M E (n s )1.0O U T P U T V O L T A G E (%)−40I O , OUTPUT LOAD CURRENT (mA)02.0806020, O U T P U T S A T U R A T I O N V O L T A G E (V )s a t V 50 ns/DIV V CC = 20 V V C = 20 V C L = 1.0 nF T A = 25°C100 ns/DIVV CC = 20 V V C = 20 V R L = 1.0 k C L = 15 pF T A = 25°CFigure 13. Top Drive Output SaturationVoltage versus Sink CurrentFigure 14. Top Drive Output WaveformFigure 15. Bottom Drive Output Waveform Figure 16. Bottom Drive Output WaveformI Sink , SINK CURRENT (mA)0.40.81.2V s a t , O U T P U T S A T U R A T I O N V O L T A G E (V )Figure 17. Bottom Drive Output SaturationVoltage versus Load Current 50 ns/DIVV CC = 20 V V C = 20 V C L = 15 pF T A= 25°CFigure 18. Power and Bottom Drive SupplyCurrent versus Supply Voltage, P O W E R S U P P L Y C U R R E N T (m A )C C , I 05.01015202530C I V CC , SUPPLY VOLTAGE (V)1000100100O U T P U T V O L T A G E (%)O U T P U T V O L T A G E (%)INTRODUCTIONThe MC33035 is one of a series of high performance monolithic DC brushless motor controllers produced by Motorola. It contains all of the functions required to implement a full−featured, open loop, three or four phase motor control system. In addition, the controller can be made to operate DC brush motors. Constructed with Bipolar Analog technology, it offers a high degree of performance and ruggedness in hostile industrial environments. The MC33035 contains a rotor position decoder for proper commutation sequencing, a temperature compensated reference capable of supplying a sensor power, a frequency programmable sawtooth oscillator, a fully accessible error amplifier, a pulse width modulator comparator, three open collector top drive outputs, and three high current totem pole bottom driver outputs ideally suited for driving power MOSFETs. Included in the MC33035 are protective features consisting of undervoltage lockout, cycle−by−cycle current limiting with a selectable time delayed latched shutdown mode, internal thermal shutdown, and a unique fault output that can easily be interfaced to a microprocessor controller. Typical motor control functions include open loop speed control, forward or reverse rotation, run enable, and dynamic braking. In addition, the MC33035 has a 60°/120°select pin which configures the rotor position decoder for either 60° or 120° sensor electrical phasing inputs. FUNCTIONAL DESCRIPTIONA representative internal block diagram is shown in Figure 19 with various applications shown in Figures 36, 38, 39, 43, 45, and 46. A discussion of the features and function of each of the internal blocks given below is referenced to Figures 19 and 36.Rotor Position DecoderAn internal rotor position decoder monitors the three sensor inputs (Pins 4, 5, 6) to provide the proper sequencing of the top and bottom drive outputs. The sensor inputs are designed to interface directly with open collector type Hall Effect switches or opto slotted couplers. Internal pull−up resistors are included to minimize the required number of external components. The inputs are TTL compatible, with their thresholds typically at 2.2 V. The MC33035 series is designed to control three phase motors and operate with four of the most common conventions of sensor phasing. A 60°/120°Select (Pin 22) is conveniently provided and affords the MC33035 to configure itself to control motors having either 60°, 120°, 240° or 300° electrical sensor phasing. With three sensor inputs there are eight possible input code combinations, six of which are valid rotor positions. The remaining two codes are invalid and are usually caused by an open or shorted sensor line. With six valid input codes, the decoder can resolve the motor rotor position to within a window of 60 electrical degrees.The Forward/Reverse input (Pin 3) is used to change the direction of motor rotation by reversing the voltage across the stator winding. When the input changes state, from high to low with a given sensor input code (for example 100), the enabled top and bottom drive outputs with the same alpha designation are exchanged (A T to A B, B T to B B, C T to C B). In effect, the commutation sequence is reversed and the motor changes directional rotation.Motor on/off control is accomplished by the Output Enable (Pin 7). When left disconnected, an internal 25 µA current source enables sequencing of the top and bottom drive outputs. When grounded, the top drive outputs turn off and the bottom drives are forced low, causing the motor to coast and the Fault output to activate.Dynamic motor braking allows an additional margin of safety to be designed into the final product. Braking is accomplished by placing the Brake Input (Pin 23) in a high state. This causes the top drive outputs to turn off and the bottom drives to turn on, shorting the motor−generated back EMF. The brake input has unconditional priority over all other inputs. The internal 40 kΩ pull−up resistor simplifies interfacing with the system safety−switch by insuring brake activation if opened or disconnected. The commutation logic truth table is shown in Figure 20. A four input NOR gate is used to monitor the brake input and the inputs to the three top drive output transistors. Its purpose is to disable braking until the top drive outputs attain a high state. This helps to prevent simultaneous conduction of the the top and bottom power switches. In half wave motor drive applications, the top drive outputs are not required and are normally left disconnected. Under these conditions braking will still be accomplished since the NOR gate senses the base voltage to the top drive output transistors.Error AmplifierA high performance, fully compensated error amplifier with access to both inputs and output (Pins 11, 12, 13) is provided to facilitate the implementation of closed loop motor speed control. The amplifier features a typical DC voltage gain of 80 dB, 0.6 MHz gain bandwidth, and a wide input common mode voltage range that extends from ground to V ref. In most open loop speed control applications, the amplifier is configured as a unity gain voltage follower with the noninverting input connected to the speed set voltage source. Additional configurations are shown in Figures 31 through 35.OscillatorThe frequency of the internal ramp oscillator is programmed by the values selected for timing components R T and C T. Capacitor C T is charged from the Reference Output (Pin 8) through resistor R T and discharged by an internal discharge transistor. The ramp peak and valley voltages are typically 4.1 V and 1.5 V respectively. To provide a good compromise between audible noise and output switching efficiency, an oscillator frequency in the range of 20 to 30 kHz is recommended. Refer to Figure 1 for component selection.Figure 19. Representative Block DiagramNOTES:1.V = Any one of six valid sensor or drive combinations X = Don’t care.2.The digital inputs (Pins 3, 4, 5, 6, 7, 22, 23) are all TTL compatible. The current sense input (Pin 9) has a 100 mV threshold with respect to Pin 15.A logic 0 for this input is defined as < 85 mV, and a logic 1 is > 115 mV.3.The fault and top drive outputs are open collector design and active in the low (0) state.4.With 60°/120°select (Pin 22) in the high (1) state, configuration is for 60°sensor electrical phasing inputs. With Pin 22 in low (0) state, configurationis for 120° sensor electrical phasing inputs.5.Valid 60° or 120° sensor combinations for corresponding valid top and bottom drive outputs.6.Invalid sensor inputs with brake = 0; All top and bottom drives off, Fault low.7.Invalid sensor inputs with brake = 1; All top drives off, all bottom drives on, Fault low.8.Valid 60° or 120°sensor inputs with brake = 1; All top drives off, all bottom drives on, Fault high.9.Valid sensor inputs with brake = 1 and enable = 0; All top drives off, all bottom drives on, Fault low.10.Valid sensor inputs with brake = 0 and enable = 0; All top and bottom drives off, Fault low.11.All bottom drives off, Fault low.Figure 20. Three Phase, Six Step Commutation Truth Table (Note 1)Pulse Width ModulatorThe use of pulse width modulation provides an energy efficient method of controlling the motor speed by varying the average voltage applied to each stator winding during the commutation sequence. As C T discharges, the oscillator sets both latches, allowing conduction of the top and bottom drive outputs. The PWM comparator resets the upper latch, terminating the bottom drive output conduction when the positive−going ramp of C T becomes greater than the error amplifier output. The pulse width modulator timing diagram is shown in Figure 21. Pulse width modulation for speed control appears only at the bottom drive outputs.Current LimitContinuous operation of a motor that is severely over−loaded results in overheating and eventual failure. This destructive condition can best be prevented with the use of cycle−by−cycle current limiting. That is, each on−cycle is treated as a separate event. Cycle−by−cycle current limiting is accomplished by monitoring the stator current build−up each time an output switch conducts, and upon sensing an over current condition, immediately turning off the switch and holding it off for the remaining duration of oscillator ramp−up period. The stator current is converted to a voltage by inserting a ground−referenced sense resistor R S (Figure 36) in series with the three bottom switch transistors (Q4, Q5, Q6). The voltage developed across the sense resistor is monitored by the Current Sense Input (Pins 9 and 15), and compared to the internal 100 mV reference. The current sense comparator inputs have an input common mode range of approximately 3.0 V. If the 100 mV current sense threshold is exceeded, the comparator resets the lower sense latch and terminates output switch conduction. The value for the current sense resistor is:R S+0.1I stator(max)The Fault output activates during an over current condition. The dual−latch PWM configuration ensures that only one single output conduction pulse occurs during any given oscillator cycle, whether terminated by the output of the error amp or the current limit comparator.Figure 21. Pulse Width Modulator Timing Diagram Current Sense Input Capacitor C T Error Amp Out/PWMInput Latch Set"Inputs Top Drive Outputs Bottom DriveOutputsFault OutputReferenceThe on−chip 6.25 V regulator (Pin 8) provides charging current for the oscillator timing capacitor, a reference for the error amplifier, and can supply 20 mA of current suitable for directly powering sensors in low voltage applications. In higher voltage applications, it may become necessary to transfer the power dissipated by the regulator off the IC. This is easily accomplished with the addition of an external pass transistor as shown in Figure 22. A 6.25 V reference level was chosen to allow implementation of the simpler NPN circuit, where V ref − V BE exceeds the minimum voltage required by Hall Effect sensors over temperature. With proper transistor selection and adequate heatsinking, up to one amp of load current can be obtained.Figure 22. Reference Output BuffersThe NPN circuit is recommended for powering Hall or opto sensors, where the output voltage temperature coefficient is not critical. The PNP circuit is slightly more complex, but is also more accurate over temperature. Neither circuit has current limiting.V V and Sensor Power6.25 VUndervoltage LockoutA triple Undervoltage Lockout has been incorporated to prevent damage to the IC and the external power switch transistors. Under low power supply conditions, it guarantees that the IC and sensors are fully functional, and that there is sufficient bottom drive output voltage. The positive power supplies to the IC (V CC ) and the bottom drives (V C ) are each monitored by separate comparators that have their thresholds at 9.1 V . This level ensures sufficient gate drive necessary to attain low R DS(on) when driving standard power MOSFET devices. When directly powering the Hall sensors from the reference, improper sensor operation can result if the reference output voltage falls below 4.5 V . A third comparator is used to detect this condition. If one or more of the comparators detects an undervoltage condition, the Fault Output is activated, the top drives are turned off and the bottom drive outputs are held in a low state. Each of the comparators contain hysteresis to prevent oscillations when crossing their respective thresholds.Fault OutputThe open collector Fault Output (Pin 14) was designed to provide diagnostic information in the event of a system malfunction. It has a sink current capability of 16 mA and can directly drive a light emitting diode for visual indication.Additionally, it is easily interfaced with TTL/CMOS logic for use in a microprocessor controlled system. The Fault Output is active low when one or more of the following conditions occur:1)Invalid Sensor Input code 2)Output Enable at logic [0]3)Current Sense Input greater than 100 mV4)Undervoltage Lockout, activation of one or more of the comparators5)Thermal Shutdown, maximum junction temperature being exceededThis unique output can also be used to distinguish between motor start−up or sustained operation in an overloaded condition. With the addition of an RC network between the Fault Output and the enable input, it is possible to create a time−delayed latched shutdown for overcurrent. The added circuitry shown in Figure 23 makes easy starting of motor systems which have high inertial loads by providing additional starting torque, while still preserving overcurrent protection. This task is accomplished by setting the current limit to a higher than nominal value for a predetermined time.During an excessively long overcurrent condition, capacitor C DLY will charge, causing the enable input to cross its threshold to a low state. A latch is then formed by the positive feedback loop from the Fault Output to the Output Enable.Once set, by the Current Sense Input, it can only be reset by shorting C DLY or cycling the power supplies.Drive OutputsThe three top drive outputs (Pins 1, 2, 24) are open collector NPN transistors capable of sinking 50 mA with a minimum breakdown of 30 V. Interfacing into higher voltage applications is easily accomplished with the circuits shown in Figures 24 and 25.The three totem pole bottom drive outputs (Pins 19, 20, 21) are particularly suited for direct drive of N−Channel MOSFETs or NPN bipolar transistors (Figures 26, 27, 28 and 29). Each output is capable of sourcing and sinking up to 100 mA. Power for the bottom drives is supplied from V C (Pin 18). This separate supply input allows the designer added flexibility in tailoring the drive voltage, independent of V CC. A zener clamp should be connected to this input when driving power MOSFETs in systems where V CC is greater than 20 V so as to prevent rupture of the MOSFET gates.The control circuitry ground (Pin 16) and current sense inverting input (Pin 15) must return on separate paths to the central input source ground.Thermal ShutdownInternal thermal shutdown circuitry is provided to protect the IC in the event the maximum junction temperature is exceeded. When activated, typically at 170°C, the IC acts as though the Output Enable was grounded.Figure 23. Timed Delayed Latched Over Current ShutdownFigure 24. High Voltage Interface withNPN Power TransistorsTransistor Q1 is a common base stage used to level shift from V CC to the high motor voltage, V M. The collector diode is required if V CC is present while V M is low.[R DLY C DLY Inǒ6.25–(20x10–6R DLY)1.4–(20x10R DLY)ǓFigure 25. High Voltage Interface withN−Channel Power MOSFETsFigure 26. Current Waveform Spike SuppressionFigure 27. MOSFET Drive Precautions Figure 28. Bipolar Transistor DriveSeries gate resistor R g will dampen any high frequency oscillations caused by the MOSFET input capacitance and any series wiring induction in the gate−source circuit. Diode D is required if the negative current into the Bot-tom Drive Outputs exceeds 50 mA.The totem−pole output can furnish negative base current for enhanced tran-sistor turn−off, with the addition of capacitor C.Figure 29. Current Sensing Power MOSFETs Figure 30. High Voltage Boost SupplyVirtually lossless current sensing can be achieved with the implementation of SENSEFET power switches.[R S @I pk @R DS(on)r DM(on))RS= 200 Ω, 1/4 W Pin 9 ≈ 0.75 I pkControl Circuitry Ground (Pin 16) and Current Sense Inverting Input (Pin 15)must return on separate paths to the Central Input Source Ground.This circuit generates V Boostfor Figure 25.Figure 31. Differential Input Speed Controller Figure 32. Controlled Acceleration/DecelerationV V A VPin 13+V A ǒR 3)R 41)R 2Ǔ R 23 *ǒR 43V B ǓResistor R 1 with capacitor C sets the acceleration time constant while R 2controls the deceleration. The values of R 1 and R 2 should be at least ten times greater than the speed set potentiometer to minimize time constant variations with different speed settings.This circuit can control the speed of a cooling fan proportional to the difference between the sensor and set temperatures. The control loop is closed as the forced air cools the NTC thermistor. For controlled heating applications, ex-change the positions of R1 and R2.Figure 35. Closed Loop Temperature ControlSYSTEM APPLICATIONSThree Phase Motor CommutationThe three phase application shown in Figure 36 is a full−featured open loop motor controller with full wave, six step drive. The upper power switch transistors are Darlingtons while the lower devices are power MOSFETs. Each of these devices contains an internal parasitic catch diode that is used to return the stator inductive energy back to the power supply. The outputs are capable of driving a delta or wye connected stator, and a grounded neutral wye if split supplies are used. At any given rotor position, only one top and one bottom power switch (of different totem poles) is enabled. This configuration switches both ends of the stator winding from supply to ground which causes the current flow to be bidirectional or full wave. A leading edge spike is usually present on the current waveform and can cause a current−limit instability. The spike can be eliminated by adding an RC filter in series with the Current Sense Input. Using a low inductance type resistor for R S will also aid in spike reduction. Care must be taken in the selection of the bottom power switch transistors so that the current during braking does not exceed the device rating. During braking, the peak current generated is limited only by the series resistance of the conducting bottom switch and winding.I peak+V M)EMFswitch)R windingIf the motor is running at maximum speed with no load, the generated back EMF can be as high as the supply voltage, and at the onset of braking, the peak current may approach twice the motor stall current. Figure 37 shows the commutation waveforms over two electrical cycles. The first cycle (0° to 360°) depicts motor operation at full speed while the second cycle (360° to 720°) shows a reduced speed with about 50% pulse width modulation. The current waveforms reflect a constant torque load and are shown synchronous to the commutation frequency for clarity.Figure 36. Three Phase, Six Step, Full Wave Motor ControllerFigure 37. Three Phase, Six Step, Full Wave Commutation WaveformsRotor Electrical Position (Degrees)100000001011111110100000001011111110720660600540480420360300240180120600S AS B S C CodeS C S B CodeS ASensor Inputs60°/120°Select PinOpenSensor Inputs60°/120°Select Pin GroundedA BB B Q 2 + Q 6C BQ 2 + Q 4Q 3 + Q 4Q 3 + Q 5Q 1 + Q 5Q 1 + Q 6Bottom DriveOutputsQ 2 + Q 6Q 2 + Q 4Q 3 + Q 4Q 3 + Q 5Motor DriveCurrentBFwd/Rev = 1C−O +−O +Conducting Power Switch TransistorsQ 1 + Q 5Top Drive OutputsQ 1 + Q 6AB T A TC T−O +100110001011001011110100010010101101Figure 38 shows a three phase, three step, half wave motor controller. This configuration is ideally suited for automotive and other low voltage applications since there is only one power switch voltage drop in series with a given stator winding. Current flow is unidirectional or half wave because only one end of each winding is switched. Continuous braking with the typical half wave arrangement presents a motor overheating problem since stator current is limited only by the winding resistance. This is due to the lack of upper power switch transistors, as in the full wave circuit, used to disconnect the windings from the supply voltage V M. A unique solution is to provide braking until the motor stops and then turn off the bottom drives. This can be accomplished by using the Fault Output in conjunction with the Output Enable as an over current timer. Components R DLY and C DLY are selected to give the motor sufficient time to stop before latching the Output Enable and the top drive AND gates low. When enabling the motor, the brake switch is closed and the PNP transistor (along with resistors R1 and R DLY) are used to reset the latch by discharging C DLY. The stator flyback voltage is clamped by a single zener and three diodes.Figure 38. Three Phase, Three Step, Half Wave Motor ControllerThree Phase Closed Loop ControllerThe MC33035, by itself, is only capable of open loop motor speed control. For closed loop motor speed control, the MC33035 requires an input voltage proportional to the motor speed. Traditionally, this has been accomplished by means of a tachometer to generate the motor speed feedback voltage. Figure 39 shows an application whereby an MC33039, powered from the 6.25 V reference (Pin 8) of the MC33035, is used to generate the required feedback voltage without the need of a costly tachometer. The same Hall sensor signals used by the MC33035 for rotor position decoding are utilized by the MC33039. Every positive or negative going transition of the Hall sensor signals on any of the sensor lines causes the MC33039 to produce an output pulse of defined amplitude and time duration, as determined by the external resistor R1 and capacitor C1. The output train of pulses at Pin 5 of the MC33039 are integrated by the error amplifier of the MC33035 configured as an integrator to produce a DC voltage level which is proportional to the motor speed. This speed proportional voltage establishes the PWM reference level at Pin 13 of the MC33035 motor controller and closes the feedback loop. The MC33035 outputs drive a TMOS power MOSFET 3−phase bridge. High currents can be expected during conditions of start−up, breaking, and change of direction of the motor.The system shown in Figure 39 is designed for a motor having 120/240 degrees Hall sensor electrical phasing. The system can easily be modified to accommodate 60/300 degree Hall sensor electrical phasing by removing the jumper (J2) at Pin 22 of the MC33035.Figure 39. Closed Loop Brushless DC Motor Control Using The MC33035 and MC33039。
基于MC33035芯片的无刷直流电机驱动系统设计解读

基于MC33035的无刷直流电机驱动控制系统设计摘要随着社会的发展和人民的生活水平提高,人们对交通工具的需求也在不断发展和提高。
电动自行车作为一种“绿色产品”已经在全国各省市悄然兴起,进入千家万户,成为人们,特别是中老年人和女士们理想的交通工具,受到广大使用者的喜爱。
MC33035的典型控制功能包括PWM开环速度控制、使能控制(起动或停止) 、正反转控制和能耗制动控制。
此芯片具有过流保护、欠压保护、欠流保护、又因此芯片低成本、高智能化、从而简化系统构成、降低系统成本、增强系统性能、满足更多应用场合的需要。
设计的直流无刷电机控制器是采用 MC33035 芯片控制的,以本次设计结果表明,MC33035的典型控制功能带有可选时间延迟锁存关断模式的逐周限流特性以及内部热关断等特性。
电动自行车作为一种新型交通工具已经在社会上引起很大的影响并受到广大使用者的喜爱。
关键词:电动自行车,无刷直流电机,MC33035,位置传感器THE BRUSHLESS DC MOTOR DRIVE SYSTEM DESIGNBASED ON MC33035 CHIPABSTRACTWith the rapid development of technology, new energy technologies in recent years have been widely used. For example, the small size, light weight, high efficiency, low noise, large capacity and high reliability features such as permanent magnet brushless DC motor-driven bike.MC33035 Typical control functions include open loop PWM speed control so that it can control (start or stop), reversing control and braking control. This chip is overcurrent protection, undervoltage protection, under current protection, and therefore chip cost, high intelligence, which simplifies the system structure, lower system costs, increase system performance to meet the needs of more applications.The design of the brushless DC motor controller is controlled by MC33035 chip to this design results show that, MC33035 typical time delay control with an optional latch-by-week shutdown mode current limiting characteristics, and internal thermal shutdown characteristics. Electric bicycles as a mode of transportation has caused a great impact on society and loved by the majority of users.KEY WORDS: electric-bicycle, brushless DC motor, MC33035, position sensors目录前言 (1)第1章电动自行车简介 (2)1.1 电动自行车的发展 (2)1.1.1 电动自行车的发展前景 (2)1.1.2 电动自行车的未来 (2)1.2 电动自行车的结构 (3)1.3 电动自行车的动力分析 (5)第2章电动自行车无刷电机原理分析 (7)2.1 电动自行车无刷直流电动机的发展 (7)2.2 无刷直流电机(BLDCM)的基本结构与工作原理 (7)2.2.1 无刷直流电机的工作原理 (8)2.2.2 无刷直流电机的基本结构 (10)2.3 直流无刷电机的控制原理 (11)第3章电动自行车控制器单元电路分析 (13)3.1 电动自行车控制器的功能 (13)3.2 无刷电机控制器单元电路分析 (14)3.2.1 无刷直流电机调速原理 (14)3.2.2 速度调速器的结构 (15)3.2.3 速度把 (17)3.3 限速电路 (20)3.4 刹车电路 (21)3.5防飞车电路 (23)3.6 巡航电路 (24)第4章无刷直流电机MC33035芯片及其工作原理 (25)4.1 MC33035芯片介绍 (25)4.2 MC33035芯片内部功能 (27)4.3 MC33035芯片的内部结构及工作原理 (29)4.3.1 MC33035芯片的内部结构及特点 (29)4.3.2 MC33035芯片的工作原理 (31)第5章基于MC33035芯片的电动自行车控制器电路 (33)5.1电动自行车控制器的研究及发展 (33)5.2 基于MC33035芯片的无刷控制器电路 (35)5.2 三相六步电机控制电路 (37)5.3 有刷电机控制电路 (39)结论 (42)谢辞 (43)参考文献 (44)外文资料翻译 (46)前言当交通拥堵、空气污染日益成为困扰现代都市的老大难问题时,电动自行车作为一种环保、便捷、健康的绿色交通工具应运而生。
MC33035在直流无刷电机控制中的应用

《电工技术杂志》!""# 年第 $$ 期
MC33035 在直流无刷电机控制中的应用
韦 敏 季小尹
(西北工业大学机电工程学院 7l0072)
摘 要 主要介绍了 MC33035 的基本原理和基于 MC33035、MC33039、IRAMsl0UP60A 及一些 外围电路构成的三相无刷直流电机闭环速度调节控制系统,可以看出其简单和优越的控制性能。
3.3 主要外围元器件功能 此电路涉及到较多的外围器件,现将主要元器
件的功能说明如下。 (l)Rl,Cl 这两个组件的选择要依据电机极
对数和电机最高转速来确定。 (2)R2,C2 这两个组件跟 Rl,Cl 一样,构成
另外一个单稳态电路。这个单稳态电路是利用电容 C2 的冲放电来产生锯齿波的,锯齿波频率一般为 5 ~ 20khz,确定锯齿波频率的原则是既要能抑制杂 波的干扰,又要不影响功率管的效率。
MC33035、MC33039 都是高集成度的电子芯片, 因而基于它的三相无刷直流电机控制系统具有电路 简单,抗干扰性强,可靠性高,稳定性好等优点。 IRAMsl0UP60A 电 机 驱 动 芯 片 能 使 电 机 功 率 达 到 750W。
本文 主 要 介 绍 MC33035 的 基 本 原 理 和 基 于 MC33035、MC33039、IRAMsl0UP60A 及一些外围电 路构成的三相无刷直流电机的闭环速度调节控制系 统。
收稿日期:2004 05 20
· 85 ·
MC33035在直流无刷电机控制中的应用
作者: 作者单位: 刊名:
英文刊名: 年,卷(期): 被引用次数:
韦敏, 季小尹 西北工业大学机电工程学院,710072
电工技术杂志 ELECTROTECHNICAL JOURNAL 2004(11) 3次
基于MC3305芯片的电动车无刷直流电机闭环控制器(1)

第25卷第5期舡韶越V01.25No.52007年10月L舭D女嘶Mm№"Oct2007(安擞农业走学工学院,安徽舍肥230036)摘要:国内电动丰无刷直流电机控制嚣大都采用分立元件,使得控制系统的设计调试复杂。
介绍了Motorola公司的第2代直流无刷电机控制器专用芯片MC33035的基本原理,设计了一种基于MC33035,Mc33039,MPM3003的电动车闭环无刷电机控制器,介绍了具体参数。
所设计的电路抗干扰性强,可靠性高,稳定性好,可内嵌到电机内部。
关键词:无刷直流电机I闭环控制器}MC33035芯片中图分类号:TP27l;V484文献标志码:A文章编号:1005—2895(2007)05—0061—030引盲近年来,由于石油能源的日益紧张及人们环境保护意识的增强,电动助力车深受欢迎。
永磁直流无刷电机驱动成为电动车的发展方向。
它由定子、转子和转子位置检测元件霍尔传感器等组成,既具备交流电机的结构简单、运行可靠、维护方便等优点,又具备了直流电机运行效率高,调速性能好等优点,在电动车等电器设备中得到广泛应用。
目前,国内电动车无刷直流电机控制器设计大都采用分立元件,使得控制系统的设计和调试复杂。
要占用较大的电路板,与把控制器内嵌到电机内部的要求相矛盾[1]。
Mc33035是Motorola公司的第二代直流无刷电机控制器专用芯片,Mc33039是Motorola公司生产的直流无刷电机控制器闭环速度控制专用芯片,MPM3003是Motorola公司生产的电机驱动芯片,输出最高峰值电流高达25A。
基于这3种芯片设计的电动车闭环无刷直流电机控制器所需的外围电路简单,抗干扰性强,可靠性高,稳定性好等优点,特别适合对控制器体积要求较高的场合o-531控制芯片Mc33035Mc33035是24脚的双列直插窄式集成电路块,其内部结构如图1所示。
其主要功能有:(1)转子位置译码器接受转子位置检测器的信号,处理后生成6路输出驱动信号控制逆变桥的正确换流;(2)故障与处理包括欠压、过热、误码、过流等;(3)正/反转控制改变6路输出驱动信号的顺序,以改变定子绕组的电流方向,从而改变电机转向;(4)制动封锁所有上桥臂的驱动信号,使电机与电源隔离,同时打开所有下桥臂的驱动信号,短接电机的电动势,使电机迅速减速;(5)内部振荡器决定PwM的调制频率;(6)转速给定包括1个误差放大器和1个PwM比较器,给定的转速信号与振荡器的输出锯齿波相比较,产生PwM控制信号;(7)内部基准电压不仅用于内部比较器和振荡器的电源,还输出作为转子位置检测器的电源。
MC33035DWR2G直流无刷电机控制器应用说明-奥伟斯科技

奥伟斯科技为您提供马达控制芯片MC33035DWR2G应用参考设计方案●内容导航:●公司简介●MC33035DWG MC33035DWR2G MC33035P MC33035PG产品规格书●产品图片●主营产品及优势产品简介●公司简介深圳市奥伟斯科技有限公司是一家专注触摸芯片,单片机,电源管理芯片,语音芯片,场效应管,显示驱动芯片,网络接收芯片,运算放大器,红外线接收头及其它半导体产品的研发,代理销售推广的高新技术企业.奥伟斯科技自成立以来一直致力于新半导体产品在国内的推广与销售,年销售额超过壹亿人民币是一家具有综合竞争优势的专业电子元器件代理商.本公司代理推广的一系列优秀触摸芯片及语音芯片,现以大批量应用到智能电子锁、饮水机、电饭煲、LED台灯等控制器为顾客提供最佳解决方案,受到广大客户的一致赞誉。
奥伟斯科技优势行业集中在家用电器和汽车电子领域,包括:智能电子锁、饮水机、抽烟机、空调、洗衣机、冰箱、洗碗机、电饭煲、电磁炉、微波炉、电动自行车、汽车仪表、汽车音响、汽车空调等。
销售网络覆盖华东、华南及华北地区。
奥伟斯科技已为众多世界著名企业提供服务如:美的、小米、云米、长虹、创维、三星、LG、飞利浦、TCL、海尔、美菱、沁园、等众多中国一流品牌电家厂商奥伟斯科技提供专业的智能电子锁触摸解决方案,并提供电子锁整套的芯片配套:低功耗触摸芯片低功耗单片机马达驱动芯片显示驱动芯片刷卡芯片时针芯片存储芯片语音芯片低压MOS管 TVS二极管主要品牌产品:OWEIS-TECH一.电容式触摸芯片ADSEMI触摸芯片代理芯邦科技触控芯片万代科技触摸按键芯片博晶微触摸控制芯片海栎创触摸感应芯片启攀微触摸IC 融和微触摸感应IC 合泰触摸按键IC 通泰触摸芯片二.汽车电子/电源管理/接口芯片/逻辑芯片:IKSEMICON一级代理 ILN2003ADT IK62783DT IL2596 IL2576 ILX485 ILX3485 ILX232 ILX3232 三.功率器件/接收头/光电开关:KODENSHI AUK SMK系列MOS管SMK0260F SMK0460F SMK0760F SMK1260F SMK1820F SMK18T50F四. LED显示驱动芯片:中微爱芯AIP系列 AIP1668 AIP1628 AIP1629 AIP1616天微电子TM系列 TM1628 TM1668TM1621五.电源管理芯片:Power Integrations LNK364PN LNK564PN 芯朋微PN8012 PN8015 AP5054 AP5056 力生美晶源微友达天钰电子FR9886 FR9888六.语音芯片:APLUS巨华电子AP23085 AP23170 AP23341 AP23682 AP89085 AP89170 AP89341 AP89341K AP89682七.运算放大器:3PEAK运算放大器聚洵运算放大器圣邦微运算放大器八.发光二极管:OSRAM欧司朗发光二极管 Lite-On光宝发光二极管 Everlight亿光发光二极管 Kingbright今台发光二极管九. CAN收发器:NXP恩智浦CAN收发器 Microchip微芯CAN收发器十.分销产品线:ONSEMI安森美 TI德州仪器 ADI TOSHIBA东芝 AVAGO安华高十一 MCU单片机ABOV现代单片机MC96F系列 Microchip微芯单片机PIC12F PIC16F PIC18F系列 FUJITSU富仕通单片机MB95F系列 STM单片机STM32F STM32L系列 CKS中科芯单片机CKS32F系列 TI单片机MSP430系列 TMS320F系列 NXP单片机LPC系列MC33035, NCV33035Brushless DC Motor ControllerThe MC33035 is a high performance second generation monolithic brushless DC motor controller containing all of the active functions required to implement a full featured open loop, three or four phase motor control system. This device consists of a rotor position decoder for proper commutation sequencing, temperature compensated reference capable of supplying sensor power, frequency programmable sawtooth oscillator, three open collector top drivers, and three high current totem pole bottom drivers ideally suited for driving power MOSFETs.Also included are protective features consisting of undervoltage lockout, cycle−by−cycle current limiting with a selectable time delayed latched shutdown mode, internal thermal shutdown, and a unique fault output that can be interfaced into microprocessor controlled systems.Typical motor control functions include open loop speed, forward or reverse direction, run enable, and dynamic braking. The MC33035 is designed to operate with electrical sensor phasings of 60︒/300︒ or 120︒/240︒, and can also efficiently control brush DC motors. Features123P SUFFIXPLASTIC PACKAGE CASE 724241DW SUFFIXPLASTIC PACKAGE CASE 751E24(SO−24L)1PIN CONNECTIONS∙ 10 to 30 V Operation ∙ Undervoltage Lockout∙ 6.25 V Reference Capable of Supplying Sensor Power ∙ Fully Accessible Error Amplifier for Closed Loop ServoApplications∙ High Current Drivers Can Control External 3−Phase MOSFET Bridge∙ Cycle−By−Cycle Current Limiting ∙ Pinned−Out Current Sense Reference ∙ Internal Thermal Shutdown∙ Selectable 60︒/300︒ or 120︒/240︒ Sensor Phasings∙ Can Efficiently Control Brush DC Motors with External MOSFET H−Bridge∙ NCV Prefix for Automotive and Other Applications Requiring Site and Control Changes∙ Pb−Free Packages are AvailableTop Drive B T OutputA TFwd/RevS A Sensor S InputsS COutput EnableReference Output Current Sense Noninverting Input Oscillator Error AmpNoninverting Input Error Amp Inverting Input C TBrake 60︒/120︒ Select A B Bottom B B Drive OutputsC B V C V CC Gnd Current Sense Inverting InputFault Output Error Amp Out/PWM Input(Top View)ORDERING INFORMATIONSee detailed ordering and shipping information in the package dimensions section on page 27 of this data sheet.DEVICE MARKING INFORMATIONSee general marking information in the device marking section on page 27 of this data sheet.© Semiconductor Components Industries, LLC, 20041 Publication Order Number:13 1214 11151016 917 818 7 19 620 5 21 422 23 24 BRepresentative Schematic Diagram This device contains 285 active transistors.MAXIMUM RATINGS1. The input common mode voltage or input signal voltage should not be allowed to go negative by more than 0.3 V.2. The compliance voltage must not exceed the range of −0.3 to V ref.3. NCV33035: T low = −40︒C, T high = 125︒C. Guaranteed by design. NCV prefix is for automotive and other applications requiring site and changecontrol.4. MC33035: T A = −40︒C to +85︒C; NCV33035: T A = −40︒C to +125︒C.5. Maximum package power dissipation limits must be observed.φ, E X C E S S P H A S E (D E G R E E S )V s a t , O U T P U T S A T U R A T I O N V O L T A G E (V )∆ , f O S C O S C I L L A T O R F R E Q U E N C Y C H A N G E (%)1004.02.0 10−0 1.010 1001000−R T , TIMING RESISTOR (k Ω) Figure 1. Oscillator Frequency versusTiming Resistor T A , AMBIENT TEMPERATURE (︒C)Figure 2. Oscillator Frequency Changeversus Temperature5648 40 32 24 16 8.0 0 − 8.0 −16 − 24 1.0 k10 k100 k1.0 M40 60 80100 120 140 160180 200 220 240 10 M− 0.8−1.61.60.8 0 01.02.03.04.05.0f, FREQUENCY (Hz)Figure 3. Error Amp Open Loop Gain andPhase versus Frequency I O , OUTPUT LOAD CURRENT (mA)Figure 4. Error Amp Output SaturationVoltage versus Load Current3.053.02.954.53.01.51.0 μs/DIVFigure 5. Error Amp Small−SignalTransient Response 5.0 μs/DIVFigure 6. Error Amp Large−SignalTransient ResponseA V O L , O P E N L O O P V O L T A G E G A I N (dB )f O S C , O S C I L L A T O R F R E Q U E N C Y (k H z )V O , O U T P U T V O L T A G E (V )V O , O U T P U T V O L T A G E (V )V s a t , O U T P U T S A T U R A T I O N V O L T A G E (V )− 4.0 − 8.0 − 12 − 16− 20− 241020304050607.0 6.0 5.0 4.0 3.0 2.01.00 010203040I ref , REFERENCE OUTPUT SOURCE CURRENT (mA)Figure 7. Reference Output Voltage Changeversus Output Source Current V CC , SUPPLY VOLTAGE (V)Figure 8. Reference Output Voltageversus Supply Voltage4020− 2− 41.02.03.04.05.0T A , AMBIENT TEMPERATURE (︒C) Figure 9. Reference Output Voltageversus Temperature PWM I NPUT V OLTAGE (V)Figure 10. Output Duty Cycle versusPWM Input Voltage250200 0.250.2150100 0.150.150 0.050 1.02.03.04.05.0 06.07.08.09.0104.08.0 12 16CURRENT SENSE INPUT VOLTAGE (NORMALIZED TO V th )Figure 11. Bottom Drive Response Time versusCurrent Sense Input Voltage I Sink , SINK CURRENT (mA)Figure 12. Fault Output Saturationversus Sink Current∆V r e f , R E F E R E N C E O U T P U T V O L T A G E C H A N G E (m V )∆V r e f , N O R M A L I Z E D R E F E R E N C E V O L T A G E C H A N G E (m V )t H L , B O T T O M D R I V E R E S P O N S E T I M E (n s ) O U T P U T D U T Y C Y C L E (%)V r e f , R E F E R E N C E O U T P U T V O L T A G E (V )1.21000.80.40 01020 I Sink , S INK C URRENT (mA)3040100 ns/DIVFigure 13. Top Drive Output SaturationVoltage versus Sink CurrentFigure 14. Top Drive Output Waveform1001000 050 ns/DIV50 ns/DIVFigure 15. Bottom Drive Output Waveform Figure 16. Bottom Drive Output Waveform−1.0− 2.02.01.00 02040601614 12 10 8.0 6.0 4.0 2.0 0 805.01015202530I O , OUTPUT LOAD CURRENT (mA)Figure 17. Bottom Drive Output SaturationVoltage versus Load Current V CC , SUPPLY VOLTAGE (V)Figure 18. Power and Bottom Drive SupplyCurrent versus Supply VoltageV s a t , O U T P U T S A T U R A T I O N V O L T A G E (V )O U T P U T V O L T A G E (%) V s a t , O U T P U T S A T U R A T I O N V O L T A G E (V )I C , I C C , P O W E R S U P P L Y C U R R E N T (m A )O U T P U T V O L T A G E (%)O U T P U T V O L T A G E (%)INTRODUCTIONThe MC33035 is one of a series of high performance monolithic DC brushless motor controllers produced by Motorola. It contains all of the functions required to implement a full−featured, open loop, three or four phase motor control system. In addition, the controller can be made to operate DC brush motors. Constructed with Bipolar Analog technology, it offers a high degree of performance and ruggedness in hostile industrial environments. The MC33035 contains a rotor position decoder for proper commutation sequencing, a temperature compensated reference capable of supplying a sensor power, a frequency programmable sawtooth oscillator, a fully accessible error amplifier, a pulse width modulator comparator, three open collector top drive outputs, and three high current totem pole bottom driver outputs ideally suited for driving power MOSFETs.Included in the MC33035 are protective features consisting of undervoltage lockout, cycle−by−cycle current limiting with a selectable time delayed latched shutdown mode, internal thermal shutdown, and a unique fault output that can easily be interfaced to a microprocessor controller.Typical motor control functions include open loop speed control, forward or reverse rotation, run enable, and dynamic braking. In addition, the MC33035 has a 60︒/120︒select pin which configures the rotor position decoder for either 60︒ or 120︒ sensor electrical phasing inputs. FUNCTIONAL DESCRIPTIONA representative internal block diagram is shown in Figure 19 with various applications shown in Figures 36, 38, 39, 43, 45, and 46. A discussion of the features and function of each of the internal blocks given below is referenced to Figures 19 and 36.Rotor Position DecoderAn internal rotor position decoder monitors the three sensor inputs (Pins 4, 5, 6) to provide the proper sequencing of the top and bottom drive outputs. The sensor inputs are designed to interface directly with open collector type Hall Effect switches or opto slotted couplers. Internal pull−up resistors are included to minimize the required number of external components. The inputs are TTL compatible, with their thresholds typically at 2.2 V. The MC33035 series is designed to control three phase motors and operate with four of the most common conventions of sensor phasing. A 60︒/120︒Select (Pin 22) is conveniently provided and affords the MC33035 to configure itself to control motors having either 60︒, 120︒, 240︒or 300︒electrical sensor phasing. With three sensor inputs there are eight possible input code combinations, six of which are valid rotor positions. The remaining two codes are invalid and are usually caused by an open or shorted sensor line. With six valid input codes, the decoder can resolve the motor rotor position to within a window of 60 electrical degrees.The Forward/Reverse input (Pin 3) is used to change the direction of motor rotation by reversing the voltage across the stator winding. When the input changes state, from high to low with a given sensor input code (for example 100), the enabled top and bottom drive outputs with the same alpha designation are exchanged (A T to A B, B T to B B, C T to C B). In effect, the commutation sequence is reversed and the motor changes directional rotation.Motor on/off control is accomplished by the Output Enable (Pin 7). When left disconnected, an internal 25 μA current source enables sequencing of the top and bottom drive outputs. When grounded, the top drive outputs turn off and the bottom drives are forced low, causing the motor to coast and the Fault output to activate.Dynamic motor braking allows an additional margin of safety to be designed into the final product. Braking is accomplished by placing the Brake Input (Pin 23) in a high state. This causes the top drive outputs to turn off and the bottom drives to turn on, shorting the motor−generated back EMF. The brake input has unconditional priority over all other inputs. The internal 40 kΩpull−up resistor simplifies interfacing with the system safety−switch by insuring brake activation if opened or disconnected. The commutation logic truth table is shown in Figure 20. A four input NOR gate is used to monitor the brake input and the inputs to the three top drive output transistors. Its purpose is to disable braking until the top drive outputs attain a high state. This helps to prevent simultaneous conduction of the the top and bottom power switches. In half wave motor drive applications, the top drive outputs are not required and are normally left disconnected. Under these conditions braking will still be accomplished since the NOR gate senses the base voltage to the top drive output transistors.Error AmplifierA high performance, fully compensated error amplifier with access to both inputs and output (Pins 11, 12, 13) is provided to facilitate the implementation of closed loop motor speed control. The amplifier features a typical DC voltage gain of 80 dB, 0.6 MHz gain bandwidth, and a wide input common mode voltage range that extends from ground to V ref. In most open loop speed control applications, the amplifier is configured as a unity gain voltage follower with the noninverting input connected to the speed set voltage source. Additional configurations are shown in Figures 31 through 35.OscillatorThe frequency of the internal ramp oscillator is programmed by the values selected for timing components R T and C T. Capacitor C T is charged from the Reference Output (Pin 8) through resistor R T and discharged by an internal discharge transistor. The ramp peak and valley voltages are typically 4.1 V and 1.5 V respectively. To provide a good compromise between audible noise and output switching efficiency, an oscillator frequency in the range of 20 to 30 kHz is recommended. Refer to Figure 1 for component selection.S A45 Sensor S BInputs 6S C3 Forward/Reverse60︒/120︒S elect22Output Enable 720 k20 k40 k25 μA20 k40 kRotorPositionDecoderV M14Fault Output2A T1 TopDriveB T Outputs24C TV in17V CC18V CUndervoltageLockout ReferenceReference Output 8Noninv. Input 11Faster 12 R T 13RegulatorError AmpPWM9.1 V4.5 VThermalShutdownLatch21A B20 BottomB B DriveOutputsError A mp Out R 19 PWM Input Q C BS10 Oscillator LatchC TSQ 40 kR9 Current Sense Input Sink Only= Positive TrueLogic WithHysteresis16 Gnd100 mV23Brake Input15 Current SenseReference InputFigure 19. Representative Block DiagramNOTES: 1. V = Any one of six valid sensor or drive combinations X = Don’t care.2. The digital inputs (Pins 3, 4, 5, 6, 7, 22, 23) are all TTL compatible. The current sense input (Pin 9) has a 100 mV threshold with respect to Pin 15.A logic 0 for this input is defined as < 85 mV, and a logic 1 is > 115 mV.3. The fault and top drive outputs are open collector design and active in the low (0) state.4. With 60︒/120︒select (Pin 22) in the high (1) state, configuration is for 60︒sensor electrical phasing inputs. With Pin 22 in low (0) state, configurationis for 120︒sensor electrical phasing inputs.5. Valid 60︒or 120︒sensor combinations for corresponding valid top and bottom drive outputs.6. Invalid sensor inputs with brake = 0; All top and bottom drives off, Fault low.7. Invalid sensor inputs with brake = 1; All top drives off, all bottom drives on, Fault low.8. Valid 60︒or 120︒sensor inputs with brake = 1; All top drives off, all bottom drives on, Fault high.9. Valid sensor inputs with brake = 1 and enable = 0; All top drives off, all bottom drives on, Fault low.10. Valid sensor inputs with brake = 0 and enable = 0; All top and bottom drives off, Fault l ow.11. All bottom drives off, Fault low.Figure 20. Three Phase, Six Step Commutation Truth Table (Note 1)Pulse Width ModulatorThe use of pulse width modulation provides an energy efficient method of controlling the motor speed by varying the average voltage applied to each stator winding during the commutation sequence. As C T discharges, the oscillator sets both latches, allowing conduction of the top and bottom drive outputs. The PWM comparator resets the upper latch, terminating the bottom drive output conduction when the positive−going ramp of C T becomes greater than the error amplifier output. The pulse width modulator timing diagram is shown in Figure 21. Pulse width modulation for speed control appears only at the bottom drive outputs.Current Limit sensing an over current condition, immediately turning off the switch and holding it off for the remaining duration of oscillator ramp−up period. The stator current is converted to a voltage by inserting a ground−referenced sense resistor R S (Figure 36) in series with the three bottom switch transistors (Q4, Q5, Q6). The voltage developed across the sense resistor is monitored by the Current Sense Input (Pins 9 and 15), and compared to the internal 100 mV reference. The current sense comparator inputs have an input common mode range of approximately 3.0 V. If the 100 mV current sense threshold is exceeded, the comparator resets the lower sense latch and terminates output switch conduction. The value for the current sense resistor is:Continuous operation of a motor that is severely over−loaded results in overheating and eventual failure.R S =I0.1stator(max)This destructive condition can best be prevented with the use of cycle−by−cycle current limiting. That is, each on−cycle is treated as a separate event. Cycle−by−cycle current limiting is accomplished by monitoring the stator current build−up each time an output switch conducts, and upon The Fault output activates during an over current condition. The dual−latch PWM configuration ensures that only one single output conduction pulse occurs during any given oscillator cycle, whether terminated by the output of the error amp or the current limit comparator.Capacitor C TError A mpOut/PWMInputCurrentSense InputLatch “Set"InputsTop D riveOutputsBottom DriveOutputsFault OutputFigure 21. Pulse Width Modulator Timing Diagram Reference Undervoltage LockoutA triple Undervoltage Lockout has been incorporated to prevent damage to the IC and the external power switch transistors. Under low power supply conditions, it guarantees that the IC and sensors are fully functional, and that there is sufficient bottom drive output voltage. The positive power supplies to the IC (V CC) and the bottom drives (V C) are each monitored by separate comparators that have their thresholds at 9.1 V. This level ensures sufficient gate drive necessary to attain low R DS(on) when driving standard power MOSFET devices. When directly powering the Hall sensors from the reference, improper sensor operation can result if the reference output voltage falls below 4.5 V. A third comparator is used to detect this condition. If one or more of the comparators detects an undervoltage condition, the Fault Output is activated, the top drives are turned off and the bottom drive outputs are held in a low state. Each of the comparators contain hysteresis to prevent oscillations when crossing their respective thresholds.The on−chip 6.25 V regulator (Pin 8) provides charging current for the oscillator timing capacitor, a reference for the error amplifier, and can supply 20 mA of current suitable for directly powering sensors in low voltage applications. In higher voltage applications, it may become necessary to transfer the power dissipated by the regulator off the IC. This is easily accomplished with the addition of an external pass transistor as shown in Figure 22. A 6.25 V reference level was chosen to allow implementation of the simpler NPN circuit, where V ref − V BE exceeds the minimum voltage required by Hall Effect sensors over temperature. With proper transistor selection and adequate heatsinking, up to one amp of load current can be obtained. Fault OutputThe open collector Fault Output (Pin 14) was designed to provide diagnostic information in the event of a system malfunction. It has a sink current capability of 16 mA and can directly drive a light emitting diode for visual indication. Additionally, it is easily interfaced with TTL/CMOS logic for use in a microprocessor controlled system. The Fault Output is active low when one or more of the following conditions occur:1)Invalid Sensor Input code2)Output Enable at logic [0]3)Current Sense Input greater than 100 mVV in1718REF UVLO 4)Undervoltage Lockout, activation of one or more ofthe comparators5)Thermal Shutdown, maximum junction temperaturebeing exceededThis unique output can also be used to distinguish betweenMPS 8 U01ATo motor start−up or sustained operation in an overloaded condition. With the addition of an RC network between the Fault Output and the enable input, it is possible to create aV in SensorPower5.6 V39ControlCircuitry6.25 V1718UVLOtime−delayed latched shutdown for overcurrent. The addedcircuitry shown in Figure 23 makes easy starting of motorsystems which have high inertial loads by providingadditional starting torque, while still preserving overcurrentprotection. This task is accomplished by setting the currentlimit to a higher than nominal value for a predetermined time.MPSU51A0.1 8REF During an excessively long overcurrent condition, capacitorC DLY will charge, causing the enable input to cross itsthreshold to a low state. A latch is then formed by the positiveTo Control Circuitryand Sensor Power6.25 VThe NPN circuit is recommended for powering Hall or opto sensors, where the output voltage temperature coefficient is not critical. The PNP circuit is slightly more complex, but is also more accurate over temperature. Neither circuit has current limiting.Figure 22. Reference Output Buffers feedback loop from the Fault Output to the Output Enable. Once set, by the Current Sense Input, it can only be reset by shorting C DLY or cycling the power supplies.(Drive OutputsThe three top drive outputs (Pins 1, 2, 24) are open collector NPN transistors capable of sinking 50 mA with a minimum breakdown of 30 V. Interfacing into higher voltage applications is easily accomplished with the circuits shown in Figures 24 and 25.The three totem pole bottom drive outputs (Pins 19, 20, 21) are particularly suited for direct drive of N−Channel MOSFETs or NPN bipolar transistors (Figures 26, 27, 28 and 29). Each output is capable of sourcing and sinking up to 100 mA. Power for the bottom drives is supplied from V C (Pin 18). This separate supply input allows the designer added flexibility in tailoring the drive voltage, independent of V CC . A zener clamp should be connected to this input when driving power MOSFETs in systems where V CC is greater than 20 V so as to prevent rupture of the MOSFET gates.The control circuitry ground (Pin 16) and current sense inverting input (Pin 15) must return on separate paths to the central input source ground.Thermal ShutdownInternal thermal shutdown circuitry is provided to protect the IC in the event the maximum junction temperature is exceeded. When activated, typically at 170 C, the IC acts as though the Output Enable was grounded.t DLY = R DLY C DLY InV ref – (I IL enable R DLY )V th enable – (I IL enable R DLY )(6.25 – (20 x 10–6 R DLY ))Transistor Q 1 is a common base stage used to level shift from V CC to the = R DLY C DLY In 1.4 – (20 x 10–6 RDLY )high motor voltage, V M . The collector diode is required if V CC is present while V M is low.Figure 23. Timed Delayed LatchedOver Current Shutdown Figure 24. High Voltage Interface withNPN Power Transistors)The addition of the RC filter will eliminate current−limit instability caused by the leading edge spike on the current waveform. Resistor R S should be a low in- ductance type.Figure 25. High Voltage Interface withN−Channel Power MOSFETsFigure 26. Current Waveform Spike SuppressionI B+ 0 t−Base Charge RemovalSeries gate resistor R g will dampen any high frequency oscillations caused by the MOSFET input capacitance and any series wiring induction in the gate−source circuit. Diode D is required if the negative current into the Bot- tom Drive Outputs exceeds 50 mA.The totem−pole output can furnish negative base current for enhanced tran- sistor turn−off, with the addition of capacitor C.Figure 27. MOSFET Drive PrecautionsFigure 28. Bipolar Transistor Drive21D SENSEFETG S MK20199 15R SPower Ground:To Input Source ReturnR S · I pk · R DS(on)100 mVV Pin 9 =r DM(on) + R S16 GndIf: SENSEFET = MPT10N10M R S = 200 Ω, 1/4 W Then : V Pin 9 ≈ 0.75 I pkControl Circuitry Ground (Pin 16) and Current Sense Inverting Input (Pin 15) must return on separate paths to the Central Input Source Ground.Virtually lossless current sensing can be achieved with the implementation of SENSEFET power switches.This circuit generates V Boost for Figure 25.Figure 29. Current Sensing Power MOSFETs Figure 30. High Voltage Boost SupplyV AV BV = V (R 3 + R 4) R 2(R 4 V )Resistor R 1 with capacitor C sets the acceleration time constant while R 2 controls the deceleration. The values of R 1 and R 2 should be at least ten Pin 13 A R 1 + R 2 3 —R 3 Btimes greater than the speed set potentiometer to minimize time constant variations with different speed settings.Figure 31. Differential Input Speed Controller Figure 32. Controlled Acceleration/DecelerationR B o o s t V o l t a g e (V )S N 74L S 145 ( )5.0 V16 11V CC Q 910 Q 8166 k 145 k100 k 8 REFQ 9 126 k 12 P313 BCD 14 P2 Inputs P1 7Q 6 7 Q 5 6 Q 4 5 108 k92.3 k 77.6 k 7 25 μA11EA1215 P0 Q 3 4 Q2 363.6 k 51.3 k 13 PWMQ 1Gnd Q 082 40.4 k 1The SN74LS145 is an open collector BCD to One of Ten decoder. When con- nected as shown, input codes 0000 through 1001 steps the PWM in incre- ments of approximately 10% from 0 to 90% on−time. Input codes 1010 through 1111 will produce 100% on−time or full motor speed.The rotor position sensors can be used as a tachometer. By differentiating the positive−going edges and then integrating them over time, a voltage proportional to speed can be generated. The error amp compares this volt- age to that of the speed set to control the PWM.Figure 33. Digital Speed Controller Figure 34. Closed Loop Speed ControlVR 3 + R 4RR4Pi n 3 =V ref V V ref 1 23 3 8 B =R 5 + 1 R 6R 1T7 R 511 R 2 312 25 μAEAR 3 >> R 5 ǁ R 66R 413PWM This circuit can control the speed of a cooling fan proportional to the differencebetween the sensor and set temperatures. The control loop is closed as the forced air cools the NTC thermistor. For controlled heating applications, ex- change the positions of R 1 and R 2.Figure 35. Closed Loop Temperature ControlR R。
无刷直流电机控制器mc33035的原理及应用

无刷直流电机控制器MC33035的原理及应用1. 简介无刷直流电机(BLDC)是现代电动机领域的重要组成部分,广泛应用于电动汽车、家用电器、工业自动化等领域。
无刷直流电机控制器MC33035是一款常用控制器之一,本文将介绍MC33035的工作原理及其应用。
2. MC33035的工作原理MC33035是一种三相直流无刷电机控制器,它采用了先进的空闲轴暂态电流控制的技术,能够实现高效的电机控制。
下面将详细介绍MC33035的工作原理。
2.1 相电流控制MC33035通过调节不同相的电流来控制电机的转速和转向。
它采用了一个电流环路和一个速度环路来实现精确的控制。
在电流环路中,MC33035通过PWM方式驱动功率MOSFET,调节电机相的电流大小和方向。
通过改变电流大小和相序,MC33035能够控制电机的转速和转向。
2.2 空闲轴暂态电流控制MC33035还采用了空闲轴暂态电流控制技术,通过改变暂态电流的大小和时序来提高电机的控制精度和效率。
在暂态电流控制过程中,MC33035会检测电机的转速和电流,并根据设定的参数进行调整,以实现最佳的控制效果。
3. MC33035的应用MC33035广泛应用于各种无刷直流电机控制系统中,具有以下特点和优势:3.1 高效性能MC33035采用了先进的控制算法和技术,能够实现高效的电机控制。
其空闲轴暂态电流控制技术可以显著提高电机的效率,减少能量损耗。
3.2 稳定可靠MC33035具有良好的稳定性和可靠性,能够在复杂的工作环境下稳定运行。
它能够自动检测和保护电机,防止过电流、过电压等故障发生。
3.3 灵活可编程MC33035具有丰富的控制参数和接口,可以根据不同的应用需求进行灵活配置。
用户可以通过编程来调整控制算法和参数,实现定制化的控制方案。
3.4 广泛应用MC33035广泛应用于电动汽车、电动工具、家用电器、工业自动化等领域。
它可以控制不同功率和转速范围的电机,满足各种应用需求。
无刷直流电机控制器MC33035的原理及应用

无刷直流电机控制器MC33035的原理及应用无刷直流电机控制器MC33035的原理及应用摘要:MC33035是美国安森美公司开发的高性能第二代单元无刷直流电机控制器,它包含开环三相或四相电机控制所需的全部有效功能。
该器件由具有良好整流序列的转子位置译码器、可提供传感器功率的温度补偿参考、频率可编程的锯齿波振荡器、完全可访问的误差放大器以及三个非常适用于驱动大功率MOSFET的大电流推挽底部驱动器组成,因而是一种功能齐全的电机控制器。
文中介绍了MC33035的特点功能和工作原理,给出了由它组成的三相六步全波电机控制和H型电机有刷控制等两种电机控制电路。
关键词:无刷直流电机控制 MC330351 概述MC33035无刷直流电机控制器采用双极性模拟工艺制造,可在任何恶劣的工业环境条件下保证高品质和高稳定性。
该控制器内含可用于正确整流时序的转子位置译码器,以及可对传感器的温度进行补偿的参考电平,同时它还具有一个频率可编程的锯齿波振荡器、一个误差信号放大器、一个脉冲调制器比较器、三个集电极开路顶端驱动输出和三个非常适用于驱动功率场效应管(MOSFET)的大电流图腾柱式底部输出器。
此外,MC33035还有欠锁定功能,同时带有可选时间延迟锁存关断模式的逐周限流特性以及内部热关断等特性。
其典型的电机控制功能包括开环速度、正向或反向、以及运行使能等。
2 管脚排列及功能定义MC33035的管脚排列如图1所示,各引脚功能定义见表1。
表1 MC33035的管脚功能定义定管脚编号符号功能定义1,2,24 BT,AT,CT 三个集电极开路顶端驱动输出,用于驱动外部上端功率开关晶体管3 Fwd/Rev 正向/反向输入,用于改变电机转向4,5,6 SA,SB,SC 三个传感器输入,用于控制整流序列7 Ooutput Enable 输出使能,高电平有效。
该脚为高电平时,可使电机动8 Reference Output 此输出为振荡器定时电容CT提供充电电流,并为误差放大器提供参考电压,也可以向传感器提供电源表2 三相六步换向器真值表输入60度SA SB SC 120度SA SB SC 正向/反向使能电流检测顶部驱协AT BT CT 底部驱动AB BB CB1 0 0 1 0 0 1 1 01 1 0 1 1 0 1 1 01 1 1 0 1 0 1 1 00 1 1 0 1 1 1 1 00 0 1 0 0 1 1 1 00 0 0 1 0 1 1 1 01 0 0 1 0 0 0 1 01 1 0 1 1 0 0 1 01 1 1 0 1 0 0 1 00 1 1 0 1 1 0 1 00 0 1 0 0 1 0 1 00 0 0 1 0 1 0 1 01 0 1 1 1 1 X X X0 1 0 0 0 0 X X XV V V V V V X 0 X V V V V V V X 1 X 表中,V表示六个有效传感器或驱动组合中的一个,X表示无关;输入逻辑0定义为小于85mV,逻辑1为于115mV3 工作原理MC33035的内部结构框图如图2所示。
基于MC33035的永磁无刷直流电机控制器的设计
器。
2 控制芯片 MC33035 的特点
MC33035 芯片带有转子位置信号译码电路、温 度补偿控制电路、含有频率外部调整的锯齿波发生 器、PWM 调制放大器、过流保护电路、欠压保护电 路、芯片过热保护电路、输 出驱动电路以及 6. 25V 标准电压输出。用 MC33035 构成的控制系统结构 简单、体积小且运行可靠。
隔离器件即可, 我们采用了 P C817。由于 MC33035 的 7 管脚为使能端, 高电平有效, 只要将其输入电平
设置为低, 即可实现能耗制动刹车, 另外可以调节控
制车速的电位器, 从而改变 PW M 信号的电机转速为零, 实现
刹车。
4. 2 检测与保护回路硬件设计
MC33035 special chip for brushless mot or , and also present s the funct ion of MC33035, t he core circuit of t he elect ricmot or and other hardwar e design.
3 电动车控制电路设计方案
以 MC33035 为核心构成的电动车控制系统采 用 PWM 方式控制电机的转矩和转速, 采用电机内 置的霍尔传感器检测转子位置, 由 MC33035 接收 霍尔传感器的位置信号, 并对其进行译码, 以决定有 哪个电极换相, 对应的真值表见表 1。以功率三极管 BU 508A 作为功率变换器件, 采用三相全桥驱动。由 人根据车速的快慢来调节控制车速的电位器, 使车 加速或减速。整个控制系统采用开环控制, 结构简 单, 可靠性高, 体积小, 可以很好地内置于电机内部。
速。运算放大器 1 由外部接成一个跟随器的形式, 所
以 11 管脚的对地电压即为比较器 2 的反相输入电
基于MC3305芯片的电动车无刷直流电机闭环控制器

[自控・检测]收稿日期:2007-01-18基金项目:安徽农业大学校青年基金项目(200500012)作者简介:李 兵(1971-),男,安徽明光人,硕士,讲师,现在安徽农业大学工作,主要从事农业机械化及自动化方面研究。
基于MC 3305芯片的电动车无刷直流电机闭环控制器李 兵 (安徽农业大学工学院,安徽合肥 230036) 摘 要:国内电动车无刷直流电机控制器大都采用分立元件,使得控制系统的设计调试复杂。
介绍了M oto ro la 公司的第2代直流无刷电机控制器专用芯片M C 33035的基本原理,设计了一种基于MC 33035,MC 33039,MPM 3003的电动车闭环无刷电机控制器,介绍了具体参数。
所设计的电路抗干扰性强,可靠性高,稳定性好,可内嵌到电机内部。
关 键 词:无刷直流电机;闭环控制器;M C33035芯片中图分类号:T P 271;V 484 文献标志码:A 文章编号:1005-2895(2007)05-0061-030 引 言近年来,由于石油能源的日益紧张及人们环境保护意识的增强,电动助力车深受欢迎。
永磁直流无刷电机驱动成为电动车的发展方向。
它由定子、转子和转子位置检测元件霍尔传感器等组成,既具备交流电机的结构简单、运行可靠、维护方便等优点,又具备了直流电机运行效率高,调速性能好等优点,在电动车等电器设备中得到广泛应用。
目前,国内电动车无刷直流电机控制器设计大都采用分立元件,使得控制系统的设计和调试复杂。
要占用较大的电路板,与把控制器内嵌到电机内部的要求相矛盾[1]。
M C33035是M otorola 公司的第二代直流无刷电机控制器专用芯片,M C 33039是M otorola 公司生产的直流无刷电机控制器闭环速度控制专用芯片,MPM 3003是Mo torola 公司生产的电机驱动芯片,输出最高峰值电流高达25A 。
基于这3种芯片设计的电动车闭环无刷直流电机控制器所需的外围电路简单,抗干扰性强,可靠性高,稳定性好等优点,特别适合对控制器体积要求较高的场合[2-5]1 控制芯片M C 33035M C 33035是24脚的双列直插窄式集成电路块,其内部结构如图1所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传感译码 电路 、限流电路 、具有温度补偿 的 6 4 . V内部基准 电 机 控制 电路 : 2
源 、 T及 C R T可变锯齿 波振荡 电路 、 脉宽 调制 比较器 、 差放大 误
M 3 0 5用 于三相 无刷直 流 电动机 的控 制 电路 如 图 2所 C 33
三相或 四相无刷直流电动机控制 ,从而按用户 的需求构成开 环 如果 电动机在空载最大转速运行 , 产生 的反馈 电动势会与供 电 或闭环转速调节系统 , 现举例说 明其应用。三相六状态全波电动 电压一样高 , 此时一旦突然制 动 , 将产生两倍 于电 5的功能特点和工作原理 , 出了由它组成的三相六步全波电机控制 、 介 C 33 给 H型有刷 电机控制和三相闭环控
制 等 三种 电机 控 制 电路 。
关键词 : 电机 控 制 ; 3 0 5 原 理 MC 3 3 ;
1 主要设计性 能特点
M 305 C 3 3 是第二代高性能无刷直流 电动机控制器 ,它 的内
民蕾科技
科技 论坛
2。。。‘。。— ‘。。。‘l。l 。 。。g‘。l 。 。‘。— 。 ’ 。 。I o s ’。。 o。 , o
无刷直流 电机专用控制 集成 电路 MC 3 3 3 0 5的原理 及 应用
金 博
( 珠铜 业有 限公 司 , 龙 黑龙 江 黑河 140 ) 63 0
容量 , 以确保制动操作时电流不超过其安全使用 范围。 其原因在 于制动 时产生 的极 大电流只能由逆变桥中位于不同相的低端开
+ R ;
MC 33 3 0 5的上述优 良性能 , 决定了它可 以方便的用于单相 、 关管和 电动机绕组的内阻来 限制 。p a=V + M Ie k (M E
差 放 大 器 可 构成 一个 简 单 的 P调 节 器 ,实 现 电机 转速 的 闭 环 控
单的阻容网络滤波后形成转速反馈信号。利用 MC 3 3 3 0 5中的误 【】白浩, 2 崔建华等. 无刷 直流电机控制 器研 究及展 望【 . 永磁 J机 】
( 上接 2 6页 )
本研究 的理论 、 方法和结论 为决策者全 面指 制定 企业 生产 的最佳方案及更完善的发展计划。
力之 比为 0 8小于 O 5 1 =. , 电动机符 合规定 。 ., 5 . x . 1 3所选 8 8 5
结束语 : 由于知识肤浅 , 缺点错误 之处 , 望同行给 予批 评指
参 考 文 献 北 京 : 国矿 业 大 学 出版 社 。0 6 中 20 .
井提升 ,提升机 和天轮 的直径 应大于或等于所采用提升钢丝绳 正 。
成P WM波 , 转子位置传感译码 电路对引脚 5 6 7输人 的转子位 电感 能量返回给供电电源 。该电动机控制器输 出能驱动定子绕 、、 置信号 进行译码 ,并 根据 引脚 56 7输入 的转子 位 置信 号对 组 为三角型连接或星型连接的电动机 , 、、 如果使 用分离电源 , 也能
P WM 比较器输出的 P WM波进行控制形成驱动三相逆变器 中六 驱 动中线接地 的定子绕组为 Y型连接 的电动机 。在任意给定 的
科技 论 坛
2 0 年第 l 期 08 O
角股钢丝绳 , 钢丝绳直径  ̄1m 钢 丝直径 蜘 . rm, 8 m, 9 a 钢丝绳单  ̄10m 5 60 m天轮 , 其直径也符合《 金属非金属矿 山安全规 程》 的要 重 I1k/ 钢丝绳抗拉强度 o 17 .M , 丝破断力总和 Q = 求 。 根据 表 2的 计算 可 以看 出 ,提 升系 统 的最 大 静 张 力 为 . g 9 m, - 6 00 p 钢 = 。 80 K 最 .1 N, 20 0 g。钢丝绳 的捻 向应 与其在滚筒上 缠绕 的螺 旋线方 向一 2 .8 N, 大静张力差 为 63K 以上两项 指标 均小于提升机 2 0 kf
山安全规程》 的要求 。 3 提升设备。根据《 ) 金属非金属矿山安全规程》 的规定 , 明竖 直径 的 8 , 0倍 同时满足 与钢 丝绳 中最粗钢丝的最大直径之 比不
最粗钢丝 直径 ,本 系统所采用 的提升机 和天轮 的直径 应 8 x 0 车( 带液压盘式制动器 ) 和天轮 , 可以满足要求 。而通过计算所得 90 m 的绞车在 卷简 直径 和宽 度上都 可满 足需要 。天轮采 用 0m
波 , 锯 齿 波 与 从 引 脚 1 输 人 的 经误 差 放 大 器 放 大 或 调 节 后 的 该 1
F 、 F 、 F )应注意的是每个 开关器件 内部均带有续流二极 4 V 5V 6。
转速 设 定 信 号 由 P WM 比较 器 比较 , P 在 WM 比较 器 的 输 出 端 形 管 用 来 在 电 动 机 减 速 或 制 动 及 六 只 开 关 器 件 换 向过 程 中将 定 子
意。
变化增大 , 则电机速度下 降 。测速器 M 309引脚 5 出方波 C 33 输 密度 变低 ,此信 号经 积分形 成 载波信 号后 幅值变 高 ,使 输 出
P WM 占空 比加大 , 出电流增加 , 输 速度 逐渐提高 , 以达到输 出跟 踪输入 , 实现稳速控 制。应用 中 , 还可外接各 P 、D调节电路以 IP 实现更 复杂 的闭环调节控制 。
致, 使其在缠绕时不致松动 。经验算钢丝绳安全 系数 为 : 提人 时 允许的参数值 , 因此 , 所选设备能够满足技术规范要求 。
m- 2 8 大 于 9 提 料 时 m。7 于 75 均 满 足 《 属 非 金 属 矿 ,1 . , 0 ; 7 6大 . ., 金
4 提 升 电机 校 核 。竖 井 提 升 系 统 的 最 大 力 与 所 选 电动 机 出 )
部集成有对单相 、三相或四相电动机进行控制所需的全部有效
功能。该器件 由具有 良好整流序列的转子位置译码器 、 可提供传 感器功率的具有温度补偿的高稳定度参考电源 、频率可编程 的
锯齿波振荡器 、完全可访问的误差放大器以及三个非常适用 于 驱 动大 功率 MO F T的 大 电流 推挽 低端 驱 动器 组成 ,此外 , SE MC 33 还具有欠压保护功能 ,同时带有可选时 间延迟锁存关 305 断模式的逐周限流特性 以及内部热关断等特性 ,还包括一个能 与微机控制系统接 口的独特的故障输出端。其典型的对 电动机 进行控制功能还 包括开环转 速 、正 向或反 向以及 运行使 能等 。 M 305 C 3 3 对外可 以引出 2 4个引脚 。 2 内部结构及工作原理 M 30 5的内部结构框图如图 1 C 33 所示 ,其 中包括转子位置
l 6. 8o
发展规划 , 出本企业 在投入 、 出方面存 在的 问题 , 找 产 并参 考给
利用给 出的方法 , 计算 未讨论 的投入 、 产出指标 配置是否 合理 。
出的模型计算结果和投影结果增加或减少相关 的投资 ,也 可以 [】毛世平. 3 技术效率理论及其测度方法【. J农业技术经济,9 8 】 19
导乳 品企业 的生产提供 了科学 的依 据 ,对各级职能部 门更好地
速 的发展 , 具有重要的意义。
参考文献 发挥管理 、 监督 、 指导 、 服务 职能 , 推进乳 品企业 的全 面健康 、 快 【】魏权龄. l 评价相对有效性 的 D A方法— —运筹学的一个新 的 E
研究领域[ . : M】 北京 中国人 民大学出版社 ,97 18 . 各乳品企业 可 以利 用给 出的 D A方法 优化本 企业 的未来 【] E 2 魏权龄. 数据 包络 分析 ( F 【 . D A) 】 J科学通报 ,0 0 9 :7 3 20 ( )19 一
只开关管 的控制信号 ,这六路信 号经 内部 的晶体管放大后从引 转 子位 置 , 都仅有一个高端 和低端功率 开关 ( 属于逆变器 中不 同
脚 1 、O 2 输 出相应的三路低 端驱 动信号 , 9 2 、l 同时从 引脚 12 2 的相 ) , ,4 导通向电动机绕组供 电。 通过合理配置可使定子绕组 的两 输 出相应 的三路高端驱动信号 , 随用户在引脚 1 输 入电压的不 端 电压从零 至直流母 线供电电压之间变化 ,而通过定子绕组 的 1 同, 六路驱动信号的频 率与脉冲宽度便不 同, 就是调节了电 电流 为 交 流 电流 。由于 前 沿 尖 峰 通 常 在 电 流波 形 中 出现 , 会 导 该 也 并 压频率 比, 而也就调节 了被 控电动机的转速 , 从 另应 看到六路驱 致 限流 。 使用时可通过 在电流检测输入处 串联一个 R C滤波器来 动信号 的相序 由引脚 的状态所唯一决定 , 一旦发生过热 、 无位置 抑制尖峰 。图中电阻 R 常采用低感 型电阻也有助 于减小尖峰 。 s 传感信号输入或位置传感信号相位不正确 、 缺相 、 流等 非正常 另一方 面应特别 注意 必须仔 细选择低端功率开关晶体管的电流 过 状态则相应的内部逻辑 电路动作 , 封锁输 出脉 冲。 3 典型应用举例
小于 9 0 0 。根据前面 的计算结果 , 所采用 的钢丝绳直径及其 中的 【 1 ]冶金 工业部 , 北京有 色冶金 设计研 究总院. 山开采设计[ . 矿 M] 2 中国采矿设备 手册矿 山机械卷【 . : 学出版 M】 北京 科 1= 4 0 m和 -90 09 = 5 m 8 14 m > 0 x . 85 m;设计选择 10 m 5 6 0 m提升绞 【]编委会.
器 、 出驱动 电路 、 输 欠压 、 过热保护 以及故 障电平输 出电路 组成 。 示 , 该电路是一个具有 全波六状态驱动的开环电动机控制器 。 外
它的工作原理可简析为 : 正常状下 , 接于引脚 1 0的电阻 R T与定 配的三相 逆变 器 中高端功 率开 关器 件选用 三 只达林顿 晶体管 时电容 C T决定了内部振荡器 的振荡频率 ,在 引脚 l O形成锯齿 ( T 、 T 、 1 ) V 1 V 2 v ’ ,而低端功 率开关器件选用 三只功率 MO F T 3 SE