声音导引系统
B._声音导引系统

声音导引系统(B题) 主要用到的器件:1)MIC及相关放大调理电路2)喇叭及相关驱动电路3)无线收发模块,如nRF24014)小车5)电机及NEC指定的驱动芯片及其电路6)其他可扩展之器件,如LCD显示等基本思路整个系统分为两部分,声源定位及车体运动控制1)声源定位根据题目要求中给出的图示,定位声源有两种方法:图1 系统示意图S可移动声源a)可以通过计算声源与A、B、C中任意两点之间的距离的方法来确定声源与A、B、C的相对位置b)可以通过计算声源发出的声音被A、B、C接收到的时间差来确定声源与A、B、C的相对位置前一种方法要求声源与接收器之间做同步,从而确定声音从发出到接收之间的时间。
同步可以通过使用无线通信发送特定指令的方式来做。
当声源需要确定自己的位置时,发射特定指令通知接收端启动计时。
该方法需要考虑无线通信带来的声音发射和接收之间的时间误差,实际测定这个误差。
后一种方法方法不需要在声源和接收器之间做同步,相对简单一些,但是位置的计算相对复杂一些。
下图是三个接收器接收到波形的示意图。
通过测量从参考时刻开始到接收到完整声音的时间Count_Time,可以得出三个时间差,根据三个时间差可得出相对位置。
(公式这里不列出,推导方法不复杂)在本部分中,无论采用哪种方法,硬件主要包含两部分:声音发送和接收声音的发送相对简单,采用常规音频放大电路即可完成。
如,采用61板板载之音频电路即可声音的接收电路的处理,大致思路如下:三个接收点的电路是一致的。
由于接收点之间的距离在1m左右,所以接收电路的输出可做进一步处理,比如加232增加传输距离等以上的处理是在不考虑噪音污染的情况下的处理思路。
若环境噪音比较严重,可考虑在接收端加入特定频率的滤波或解调电路。
2)车体运动控制车体运动控制主要涉及到NEC的芯片的使用,这里不再赘述。
什么是声纳的原理和应用
什么是声纳的原理和应用声纳的原理声纳(sonar)是一种利用声音波传播性质进行探测和测量的技术。
它利用声波在各种介质中的传播速度来实现距离测量、目标探测和成像等功能。
声纳系统一般由发射器、接收器、信号处理和显示控制部分组成。
声波传播的原理声波在介质中传播的速度取决于介质的密度和弹性系数。
当声波遇到不同密度和弹性系数的介质时,会发生折射、反射和散射等现象。
这些现象可以被声纳系统利用来获取目标信息。
发射器和接收器的工作原理发射器是声纳系统中负责产生声波信号的部分。
它一般使用压电陶瓷、震荡器或扬声器等装置来产生声波。
接收器则是负责接收声波信号的部分,一般使用压电陶瓷、微手机或接收水柱等装置。
当发射器发出声波信号后,信号会在介质中传播并与目标发生交互作用。
部分信号会被目标反射回来,被接收器接收到。
接收器将接收到的信号转换成电信号,并传送给信号处理部分进行处理。
信号处理和显示控制的原理信号处理是声纳系统中非常重要的环节,它负责对接收到的信号进行分析和处理。
常见的信号处理算法包括滤波、解调、积分和差分等。
经过信号处理后,信号就可以呈现在显示器上。
常见的声纳系统显示器有波形显示器、频谱分析仪和图像显示器等。
这些显示设备可以将声波信号以可视化的方式展示出来,方便用户对目标进行识别和分析。
声纳的应用声纳技术在许多领域都有广泛的应用。
海洋探测和测量声纳技术在海洋探测和测量领域有着重要的应用。
通过声纳系统可以测量海洋的深度、海底地貌以及水下目标的位置和形态信息。
这对于海洋资源开发、航海安全和海洋科学研究等具有重要意义。
水下通信和导航声纳技术可以用于水下通信和导航。
水中传统的通信方式受到水的吸收和散射等因素的影响较大。
而利用声波进行通信可以克服这些问题,实现可靠的水下通信。
此外,声纳系统还可以用于水下导航,帮助潜水员或潜水器确定位置和方向。
鱼群探测和捕鱼声纳技术在渔业领域也有着重要的应用。
渔民可以利用声纳系统来探测鱼群的位置和密度信息,从而确定渔场的选择和渔获的预测。
基于AVR单片机的声音导引系统的设计

鸣器提供高低电平 , 发出声音信号; 声音接收器采 用常用的驻极体话筒,其收到的信 号经过放l 去 火、 噪、 频率电压转换以及对接收器之间接收信号的时 间进行比较可以实现对声源的定位。 主单片机通过 与从单片机之间的无线通讯将控制数据传送给从
科
李福全 杜义浩
科技 论坛 f f f
王 亮 字 文 芬
基于 A R单片机 的声音 导 引系统 的设 计 V
( 黑龙江八一农垦大学信息技术 学院, 黑龙 江 大庆 13 1 ) 63 9
摘 要: 本设计利用 AV R单片机设计开发 的声音导引 系统, 能过主单片机与从 单片机之 间的无线通讯将控 制数据传送给单片机 , 可以实现声 源位 移 的 控 制 。本 系统 具有 数 据 处理 、 实时 采样 、 制 准 确等 功 能 . 控 . 关键词 : 片机 ; 单 无线通讯; 步进 电机 ; 带通滤波 a
1 案选择 方 1 声源 的选择 . 1
Байду номын сангаас
一
只 在 饱 和 和 截 止 状态下, 效率非伟
声源可以采用超声波传感器和普通传感器。 高 , 利 于节 省毹 有 其中超声波传感器的特点是传输距离理想n接受 源 。 在市场上也 现 器收到的声音信号失真小。 但考虑到超声波传感器 有 相 应 的成 品 出 发射的声波信号几_ 乎是直线传输,而且成本较高, 售 ,价格 便 宜 , 使 而韭通的蜂鸣器的特点是工作电路简单, 上电就能 用 起 来简单 方便 。 l 5电机 的 选 发出固定频率的声波, 单片机可以对其进行直接控 制, 而且蜂呜器发出声音的频率为2 Z到 4 Z 择 KH KH 之I 对声音接收器力1 此频率范围的带通滤波器 司, I E 电 机 采 用 步 圉 ‘ 、 d 就可以很好的滤除噪声。基于 b苤 分析, 我们选择 进 电机 步进 电机 a所示。 和 8 1 引脚所接电容为 1u , 0 F 了普通传感器。 个显著的特点就是具行陕速起停能力, 如果负荷 电路图如图() 0 。5引脚输出接阻容整形后可以得到 1 2带通滤 波电路的选择 不超过步进电机所能提供的动态转矩值 , 就能够立 即增益为 2 0 但此部分放大出的信号混 带通滤波电路可以采用有源带通滤波和无源 即使步进电机肩动和停止;- 爪显著托 点是控制精 不失真的音频放大信号, 需进行下一步的滤波处理。.2 2 .带通滤波。 1 带通滤波。 有源带通滤波是 目前常用的带通滤波方 度高, 正反转控制灵活 : 同时步进电机的速度控制 有噪声 , 蜂 n器 发 出 的 声音 频 率 为处 于 2 H 鸟 K Z到 IK Z OH 式, 其滤波效果理想 , 滤波的带宽和中心频率 叮以 更 加方便 , 改变速度 只须改变相 序的频率 即可 。 之间 , 为了滤除噪声 , 提取处于此频率段的有效信 任意选择且电路县体器件的参数容易计算; - 无源带 1 五电源方 案的选择 设计 的二 阶 有源带 通 滤波 电路 ( h ) 中心 图()其 通滤波装置结构简单, 成本较低 , 但是滤波特性受 红本设 汁中 ,由于小 车 的机 动性和灵 活性 更 号 , K Z能够 达 到要求 。图 中 R 、 组 成 1C1 系统参数 的影响较 大 , 极易与 系统或 者其它 滤波支 为重要 , 此 采川单 电 源 。这样供 电 电路 比较 简 频率为  ̄8 H I 路发生 串并 联谐振 。 同时通带的 宽度 中心 频率也 单 ; 是 由于 电动机启 动 瞬间 电流 较大 , R 、2 但 而且 P WM 低 通网络 ,2C 组 成高通 网络 ,两 者串联就 组成 了二阶带通网络。 3频率电压变换。 Z1 带通滤波输 不易计算 , 滤波效果也不是很理想。本设计中采用 驱动 的电动机 电流波动很大 , 会造成 电压不稳 。 出的是固定频率的音频电压信号, 需进行频率电压 有源带通滤波。 2系统 十 r 得 丁 1 3声音接收 器的选择 单片 机 系统 足 整 个 声音 导 引 系 统 的核 心 部 变 换 ,同时为 _ 到与单 片机端 口兼 容的 T L电 声 音接收 器采用驻极体 话筒 。驻极体 话筒 具 分 , 主要 用 于无线 数 据收 发 、 据 处理 、 需要进行电平转换。频率电压变换与电平转换 它 数 实时 采 平, c。经实际测试测出, 当接收到声音 有体积小、 结构简单 、 电声性能好 、 价格低的特点 , 样 、 析 系统参 数 , 制 电机及 对各部 分检 测环 节 的原理图如网() 分 控 属 于最常用的 电容话筒 。 本 f 由于 点是通 过 进行 整 的重 . ~. 8 2 目 系统组成主要包括 A R单片机、 V 无线收 时,频率 电压转换输出端的电压在 1 V 2 V之 检 测声源发 出 的声波来 检 测声源 的位 嚣并控 制声 发 模块 、 器 、 滤波 电路 、 经 M3 9电压比较器( 基准电压设定为 1 V . , 3 扬声 带通 电动 机双桥驱 动芯 间, L 3 输 出接 上 电阻 1K) 电平转换 后得到标 准的 拉 0 进行 源的位移 , 需要 声音接 受器对 声音 具有较 高 的 片 L 2 8和人赛指定电机驱动芯片等. 这就 M9 . .’ rL电平 2 . I . 1 4用于抗于扰的单稳触发电路。 当外 灵敏度,虽然声音接受器的灵敏度 ‘信噪比成反 j 2 系统的硬件设汁 . 1 比 ,但 噪声是 可 以通 过带通滤 波器有效 滤除 的 , 所 输 Z 占频 放大 。驻极体 话筒接收音 频信 号, 界发出强烈声音时 ,系统可能会受到干扰作用 , 1 1 输 使单片机反复进入中断, 为保证 以用驻极体话筒做声音接受器也是可 的 微弱的电压信 y, - 此信号必须经过放大才能被利 出电平产生震荡 , 1 4电机驱动模 块的选择 用。L 8 是专为低损耗电源所设计的功率放大 程序仵两次发声时间间隔内系统不会受到外界的 M36 电机驱动模块采用功率品体管组成的 t 型 器 集成 电路 。 的 建增益 为 2 , 过 1和 8 t 它 0透 引脚 任何干扰, 可以 两次发声的时间加入单稳触发电 用 位 间 电容 的搭配 , 最 路 , 以屏 蔽外界的干 扰。在频率 电压转换 电路后 增益 5定 d 高可达 2 0 L 8 0 。 M36可使 加 一 5 5 时器组成 的单稳 态 触发 电路 ,如 图() 电路输出稳定的低电平, 发声瞬问, 用电池为供应电源 , 输入 所示。无声时, { 产生 I , j 可使用此 上 跳沿触发单片机产 电 压 范 围 可 以 是 其输“ 调节输 出脉 宽略小 于两次 发声之 间 时间间 4 一2 V 1V,无动作时仪消 生中断 , 同时可 耗4 mA电流 , 失真 低 。 隔即可屏蔽掉由于外界干扰而产生的振荡, 且 使系统工作更为 所以我们直接使用 卜了 屏蔽掉带通滤波没有滤掉的噪声 , 21 5电机 驱动 。 考虑到 H型桥 路的电机驱 动 L 8 来 放 大 驻 极体 话 稳定 。 . M3 6 价格便 ( 下转 1 3页 ) 4 筒的输出。 音频放大具_ 芯片市场上有销售 、 { 奉
基于AT89S52的声音导引系统设计

基于AT89S52的声音导引系统设计作者:冯洋来源:《现代电子技术》2010年第08期摘要:介绍了声音导引系统的设计与实现。
该系统包括单片机系统电路、声源调制电路、接收器电路、步进电机驱动电路、声光提示电路等。
采用两块单片机(AT89S52)分别作为可移动的声源的检测和控制核心。
由单片机1根据三个接收器接收声源信号的先后时间确定声源当前的位置,再由无线发送给单片机2。
单片机2利用ASSP芯片(型号MMC-1)控制电机的转速实现可移动声源的运动控制,并且移动到位后给出声光提示。
该电路设计方法简单、功耗低、性价比高,经调试可实现声音导引系统的精确控制。
关键词:单片机; 声音导引; 移动声源; ASSP芯片中图分类号:TP271文献标识码:B文章编号:1004-373X(2010)08-0182-04Design of Voice Guidance System Based on AT89S52FENG Yang(Weinan Teachers University, Weinan 714000, China)Abstract:The design and implementation of the voice guidance systerm are introduced. The system consists of SCM system circuit, sound source modulation circuit, receiver circuit, stepping motor drive circuit and acoustoopic cuecircuit.Two single chip computers (AT89S52) are respectively used as the mobile sound source detection and control cores. The current location of the sound source is determined by MCU1 according to the time sequence of receiving a sound source signal by three receivers, and then is sent to the MCU2 through radio. MCU2 uses ASSP chip microcontroller (model MMC-1) to control the motor speed to achieve the motion control of mobile source, and sends out an acoustooptic cue when arriving at the designated place. The circuit is simple and haslow power consumption and high cost-performance ratio. The precise control of the voice guidance system can be realized by debugging.Keywords:single chip computer; voice guidance; moving sound source; ASSP chip0 引言2009年全国大学生电子设计大赛的B题是“声音导引系统”;题目要求设计并制作一声音导引系统声音导引系统有一个可移动声源S,三个声音接收器A,B,C,声音接收器之间可以有线连接。
(hxn2)声音导引系统

甘肃省大学生电子设计大赛设计报告题目:声音导引系统院校:甘肃省河西学院参赛学生姓名:吉彦平尹喜金梅艳指导教师:顾建雄南雅公黄小娜摘要:本文对声音引导系统的整体设计方案进行了全面的分析,主要分为四个部分:声源设计、声音发射、声音信号接受和指令信号的产生与发射,以及ASSP芯片(型号MMC-1)控制声源运动。
设计作品基本满足各项技术指标。
关键词:无线信号传输红外传感器ASSP芯片(MMC-1)1 系统方案1.1设计要求1.1.1 基本要求(1)制作可移动的声源。
可移动声源产生的信号为周期性音频脉冲信号,如图1所示,声音信号频率不限,脉冲周期不限。
(2)可移动声源发出声音后开始运动,到达Ox 线并停止,这段运动时间为响应时间,测量响应时间,用下列公式计算出响应的平均速度,要求平均速度大于 5cm/s 。
(3)可移动声源停止后的位置与Ox 线之间的距离为定位误差,定位误差小于3cm 。
(4)可移动声源在运动过程中任意时刻超过Ox 线左侧的距离小于5cm 。
(5)可移动声源到达Ox 线后,必须有明显的光和声指示。
(6)功耗低,性价比高。
1.1.2 发挥部分(1)将可移动声源转向180度(可手动调整发声器件方向),能够重复基本要求。
(2)平均速度大于10cm/s 。
(3)定位误差小于1cm 。
(4)可移动声源在运动过程中任意时刻超过Ox 线左侧距离小于2cm 。
(5)在完成基本要求部分移动到Ox 线上后,可移动声源在原地停止5s ~10s ,然后利用接收器A 和C ,使可移动声源运动到W 点,到达W 点以后,必须有明显的光和声指示并停止,此时声源距离W 的直线距离小于1cm 。
整个运动过程的平均速度大于10cm/s 。
图1 信号波形示意图可移动声源的起始位置到Ox 线的垂直距离 响应时间平均速度=1.2 系统方案比较1.2.1声源设计方案一:利用单片机产生音频脉冲信号,并经过功放,推动扬声器发声。
基于ARM7的声音导引系统的设计

b l o n s u c e tr a d d sg e h e e ev r o d t c t i e e c f s u d s u c r n mis n t h e i s u d o r e v co n e in d t re rc ie s t ee t i e me d f rn e o o n o re t s si o t r e f a o
c n e u e NEC oo c nr l hi D7 F1 03 nd h f l b i g c i 98 t d i a tpp r moo c l s — e tr, s d m t r o to c p 8 2 a t e ul- rd e h p L2 o rve se e tr a"a a no
目的地 坐标 数据 无线传 输给 声 源小车 , 其精 确移 动到 目的地 实验 结 果表 明 . 使 系统 运行稳 定 关 键词 : 音定 位 ; M7; 声 AR 电机 控 制 : 线传 输 无 中 图分 类 号 : TH8 5 6 文献 标 志 码 : B
De i n o un Gu da e y t m s d n sg f So d i nc S se Ba e o ARM 7
摘 要 :为设 计一 种 声 音导 引 系统 . ̄AR 作 为 系统 的控 制核 心 .采 用NE 2. M7 C电机 控 制 芯 片
D7 F 2)外加L 9 全桥 驱 动步进 电机 小车作 为移 动 声源裁体 .并 设计 三 个声音 接 收 器来检 测 8 1( 3 28
声源 的声音 到三 个接 收 器的传 输 时 间差 , 用G S 利 P 定位 算 法计 算 声 源坐标 , 然后将 声 源 坐标 和
H h n A G L i,O G Y e,H N h-a L u HU N i ig U S e g, N e S N u Z A G Z iin,IJn , A G Ha m n Y j —
基于声音导引的声源定位系统设计

以及 麦 克 风 阵 列 声 源定 位 。 主 流 的研 究 方 向是 通 过 各 种 技 术 确
定声源 的精确位置 , 文献【】 2 中提 出的基于无线传感 网络 的声 源
定 位 系 统 提 高 了声 源 定 位 技 术 的灵 活 性 。本 文 设计 的 系 统是 在 声 源 定 位 的基 础 上 , 制 声 源 的移 动 , 其 移 动 到 预 想 的 位 置 , 控 使 实现声源的再定位。系统 以 C 0 1 片机为核心 , 85 单 以麦 克 风 为 收音 设 备 , 计 一 个 以声 音 为 引 导 , 过 无 线 通 信 技 术 , 现 对 设 通 实 移 动 声 源 的定 位控 制 系 统 。
陈益 如 王 博 邬 杨 波
( 宁波大学信息科 学与工程技术 学院, 浙江 宁波 3 5 1 ) 12 1
摘 要
声 音 定 位 技 术在 当今 高度 智 能 化 的 社 会 中有 着 诸 多 方 面 的 应 用 , 涉及 军 事 、 洋 搜 索 、 海 多媒 体 通 信 、 能机 器 人 等 方 智
s n t l a i a o s ou d o oc t on s pr po ed.
Ke wors:oun l aiain,oc gudan e, r e s c y d s d oc l t v ie z o i c wi s om munca in,on r el i t c tol o
Abs r c ta t
Sou lcai t n as nd o l i h man za o y appl a i s n o i t c on i n wad ys i l it lg t ed o it I as s i m i a yoc an ea c a hghy n el eni s cey. h u ed n i z t l r , e s r h, i t mut lmedi c i a omm u c in i el niat s, o nt l i t rbot t Th r f e,ou d lcaiat h s s e f ap ia i an i a a an ed gen o . c. e eor s n o l i e z on a p cic i pl t c on d s n dv c t c olgy. i pa r e hn o Ths pe de i s ou d o l a i s sem ih s ba ed on v ce gui n n t s s t m ,s m ir ph e sgn a s n lcai t z on y t whc i s oi da ce I hi yse u e c o on t gai v ie,s wi ls co m u c t t a iv s un lc ia i Afer e t g. i s sem c p e s c tolt e o n oc u e r es e m nia i on o che e o d o al t z on.t t si Ths y t n an r cie onr h
声音导引电动车系统硬件设计

第九届全国大学生电子设计竞赛题目
总分
30
基本
要求
实际制作完成情况
50
发挥
部分
完成第(1)项
7
完成第(2)项
2
完成第(3)项
7
完成第(4)项
6
完成第(5)项
12
完成第(6)项
5
完成第(7)项
6
其他
5
总分
50
无线环境监测模拟装置(D题)
【本科组】
一、任务
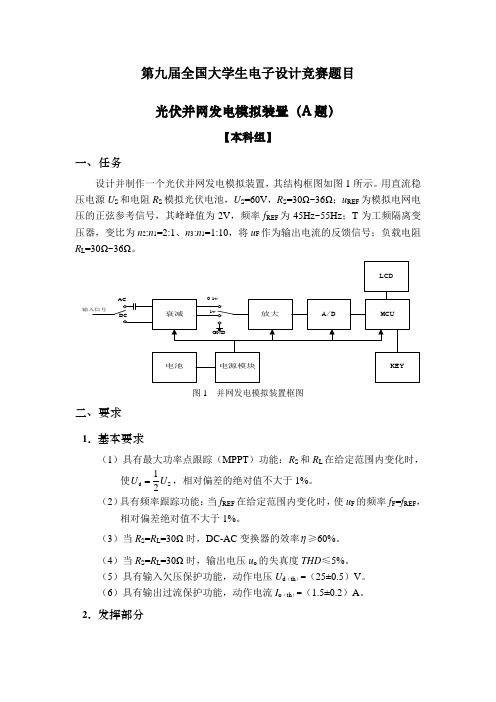
设计并制作一个无线环境监测模拟装置,实现对周边温度和光照信息的探测。该装置由1个监测终端和不多于255个探测节点组成(实际制作2个)。监测终端和探测节点均含一套无线收发电路,要求具有无线传输数据功能,收发共用一个天线。
(4)可移动声源在运动过程中任意时刻超过Ox线左侧的距离小于5cm。
(5)可移动声源到达Ox线后,必须有明显的光和声指示。
(6)功耗低,性价比高。
2.发挥部分
(1)将可移动声源转向180度(可手动调整发声器件方向),能够重复基本要求。
(2)平均速度大于10cm/s。
(3)定位误差小于1cm。
(4)可移动声源在运动过程中任意时刻超过Ox线左侧距离小于2cm。
二、要求
1.基本要求
(1)制作2个探测节点。探测节点有编号预置功能,编码预置范围为B~B。探测节点能够探测其环境温度和光照信息。温度测量范围为0℃~100℃,绝对误差小于2℃;光照信息仅要求测量光的有无。探测节点采用两节1.5V干电池串联,单电源供电。
(2)制作1个监测终端,用外接单电源供电。探测节点分布示意图如图1所示。监测终端可以分别与各探测节点直接通信,并能显示当前能够通信的探测节点编号及其探测到的环境温度和光照信息。
声音导引系统中位置控制算法的研究

该 系 统 要 求 小 车 移 动 过 程 中 平 均 速 度 大 于
1 m/ , 0c s 声源水 平 到 达和 垂 直 到达 时 , 离 O 距 x线 和 O 线 的直线小 于 1c m.
9。 O 转弯 后垂 直移 动 , 如果 9 。 不 能保 证 , 很 难再 0弯 则 对 小车进 行方 向调整 , 车垂直移 动时 , 出现 较大水 小 会 平 摆动 , 有极 大可能 超 出要 求 , 法完成 规定任 务. 无 另外 , 境 可能 存 在噪 声 干扰 , 使 用该 方 法时 , 环 在 必须 对移 动声 源的发 生频 率 进 行 限制 , 一般 应 提 高到 1 Hz 0k 以上 , 站在 信 号处 理 时 , 对 接 收到 的 信号 基 应 进行 带通 滤波 , 可能 滤 去 环 境 噪声 .但 由于 环境 噪 尽 声是 一种广 谱信 号 , 因此 较 大 的噪 声 还是 有 可 能对 控
1 设 计 要 求
某声 音 导引系统 如 图 1 所示 .该系统 中有 1个 可 移动声 源 、 个声 音接 收器 A、 C 3 B、 .图 1 , 中 AB与AC 垂直 , x是 AB 的 中垂线 , O 0Y是 AC 的中垂线 , 是 W
O 和 0 Y的交的作 用 下 , 方 面使移 动 机 一 器 人在不 需要人 干预 的 情况 下 , 够 自主 地完 成 运 动 能 规划、 躲避 障碍物 等 功能 ; 一 方 面 , 们 可 以采 用 多 另 人
样 化 的手 段对它进 行 各种 方 式 的控 制 , 现 半 自主 运 实
行, 如操作 者通过 键盘 和 鼠标发 送控制命 令 , 以及可 以
通 过 I tr e 和网络 与 它取 得 联 系 , 遥 远 的异 地 获 nen t 从
声音导引系统

声音导引系统(B题)摘要:本文描述了声音导引系统的设计原理和实现方法。
该系统由AT89S52单片机控制,通过NEC公司的ASSP电机控制芯片和单片机之间的串行通信实现可移动声源的运动。
主控制器利用不同声音接收器间产生的误差信号,并用无线通信方式将此误差信号传输至可移动声源,引导其运动。
系统最大特点在于软件设计采用层次化、模块化的设计方法,使得复杂数学模型和控制算法得以简化和快速开发。
经调试和测试,系统各项性能参数已基本达到设计指标。
关键词:声音导引 89S52单片机 ASSP芯片算法一、设计任务与要求设计并制作一个声音导引系统,可移动声源运动的起始点必须在Ox线右侧,位置可以任意指定。
利用声音接收器和可移动声源之间的不同距离,产生可移动声源和目标线之间的误差信号,并利用无线通信方式将此误差信号传输至可移动声源,引导其运动。
二、系统整体设计方案比较与选择根据题目要求,系统可以分为两个基本模块,由两片八位单片机分别实现,本声音导引系统的控制关键在于,精确检测误差信号,使可移动声源按要求运动。
系统示意图如下,初步分析设计方案:方案一、在可移动声源向Ox线逼近时,把接收器A和B接收到声源的声音的强弱分别转换成它们与声源之间的距离,从而判断声源是否到达目的地。
方案二、启用单片机定时器,根据接收器A和B接收到声音的时间差来判断声源的位置,进而调节电机运行的速度,直至声源是否到达目的地。
方案分析:鉴于方案一中声音的强弱受外界干扰太大,检测到的声音信号不定,而测量时间差则相对精确,所以本系统采用方案二。
三、设计与论证1、电机运行速度设计根据题目要求,可移动声源发出声音后开始运动,到达Ox线并停止。
要求平均速度大于 5cm/s。
如上图1所示,鉴于此要求,可以采用霍尔传感器直接测出电机的转速,并将此速度反馈给辅控制单片机,由此来调节占空比,进而调节电机的转速。
但由于比赛时间有限,此方案并未落实。
2、误差信号的产生声源发出声音并移动,辅助控制器控制A、B接收器同时启动,利用A、B接收器接收到声音的时间差来判断声源与Ox线之间的误差,若时间差大于零则说明声源与Ox线之间有误差,声源继续移动,直到时间差为零时停止。
声音导引实验系统

1声 道 部分机 顶盒 厂家运用 E P模拟技术 ,在 Fls 盒 也 开 始 采 用 多 声 道 输 出 , 比 如 5. 2 ah PDI F的 数 字 音 频 上 面 模 拟 E P的 存 储 , 从 而 不 再 采 用 E P, 2 2 等。 现在 一 些音 响 都 有 S 降低 机顶 盒 成本 。这 项技 术 要 求模 拟算 法 , 信号 接 口( 为 S 标 PDI 或 者 数 字 音 频 ) 所 F , 以 一 些 高 级 一 点 的 机 顶 盒 都 带 有 这 个 接 否则 不能 保 证写 入 次数 。 口 ,接 口形 式 一 般 采 用 RCA 接 头 的 同 轴 电 6 音频 D C A 机 顶 盒 内部 处 理 的 音 频 信 号 为数 字信 缆 或 者 光 纤 接 口 。 号 , 要 输 出 到 普 通 电 视 机 , 需 要 转 换 为 模 8 2 视 频 . () -Vie ( 1S d oS端 子 , Y/C)现 在 高 级 一 : 拟 信 号 , 这 就 需 要 音 频 DAC 来 完 成 。 许 多 CP 已 经 把 这 部 分 集 成 到 CPU 内 部 , 比 如 些 的 电 视 都 带 有 分 量 输 入 接 口 , 分 量 接 口 U S 1 5 QAMi 5 6等 , 如 果 没 有 集 成 ,就 尤 其 是 模 拟 分 量 接 口 并 没 有 国 际 统 一 的 标 T5 0 , 51 需 要 外 置 音 频 DAC 。 一 般 采 用 C¥ 3 4来 准 , 目 前 最 为 常 见 的 是 日 本 的 D 端 子 、 欧 43 完 成 ,当然 还 有其 它型 号 ,只是用 量 较少 。 洲 的 SCART 端 子 和 美 国 的 三 线 端 子 。 我 国 目前 采 用 的 是 美 国 的 三 线 端 子 。 7 音 频放 大器 ( 放 ) 运 () 2VGA 接 口 : 接 口输 出 模 拟 的 RGB 该 经过 音 频 DAC转换 出来 的模 拟 信号 还 比 较 微 弱 , 要 匹 配 电 视 机 等 音 频 设 备 , 还 信 号 , 目前 仅 在 高 清 机 顶 盒 上 面 附 带 , 可 需 要 把 信 号 进 行 放 大 , 这 个 工 作 就 有 音 频 以 将 视 频 输 出 到 电 脑 显 示 器 。 f) 3 HDMI ( g f ii n M u t - Hi h De i t n o li me 放 大 器 来 完 成 , 一 般 采 用 音 频 专 用 运 算 放 i n e f c 大 器 ,比如 4 5 , 3 5 8 8 3等 ,也 有 采 用 普 通 运 d a I t r a e, 高 清 多 媒 体 接 口 ) 接 口 : 接 算 放 大 器 的 , 比 如 L M )5 F( 3 8等 。 更 高 级 的 HDM I 口 只 有 在 最 新 的 高 清 机 顶 盒 和 最 NE5 3 5 2运 算 放 大 器 , 只 有 在 发 烧 级 的 设 新 的 平 板 电 视 上 才 会 有 。 这 个 接 口 是 一 个 备 上 才 使 用 。 音 频 放 大 器 的 主 要 性 能 在 于 新 标 准 , 同 HDCP配 合 , 可 以 防 止 拷 贝 等 。 () s ly o t 4Dip a P r :Dipa o t 一 个 s ly P r 是 带 宽 和 幅 频 特 性 , 如 果 带 宽 更 宽 ,我 们 听 更 到 的 音 频 频 率 范 围就 更大 ,还 原 更 真 实 。 开 放 的 接 口 , 他 的 接 口 速 率 比 HDM I 高 , 并 且 适 用 于 电 脑 及 家 电 ,并 兼 容 HDM I 因 , 8 音视 频 输 出接 口
历届全国大学生电子设计竞赛试题

历届全国大学生电子设计竞赛试题第一届(1994年)全国大学生电子设计竞赛题目(1)简易数控直流电源(A题)(2)多路数据采集系统(B题)第二届(1995年)全国大学生电子设计竞赛题目(1)实用低频功率放大器(A题)(2)实用信号源的设计和制作(B题)(3)简易无线电遥控系统(C题)(4)简易电阻、电容和电感测试仪(D题)第三届(1997年)全国大学生电子设计竞赛题目(1)直流稳压电源(A题)(2)简易数字频率计(B题)(3)水温控制系统(C题)(4)调幅扩播收音机(D题)第四届(1999年)全国大学生电子设计竞赛题目(1)测量放大器设计(A题)(2)数字式工频有效值多用表(B题)(3)频率特性测量仪设计(C题)(4)短波调频接收机设计(D题)(5)数字化语音存储与回放系统(E题)第五届(2001年)全国大学生电子设计竞赛题目(1)波形发生器(A题)(2)简易数字存储示波器(B题)(3)自动往返电动小汽车(C题)(4)高效率音频功率放大器(D题)(5)数据采集与传输系统(E题)(6)调频收音机(F题)第六届(2003年)全国大学生电子设计竞赛题目(1)电压控制LC振荡器(A题)(2)宽带放大器(B题)(3)低频数字式相位测量仪(C题)(4)简易逻辑分析仪(D题)(5)简易智能电动车(E题)(6)液体点滴速度监控装置(F题)第七届(2005年)全国大学生电子设计竞赛题目(1)正弦信号发生器(A题)(2)集成运放测试仪(B题)(3)简易频谱分析仪(C题)(4)单工无线呼叫系统(D题)(5)悬挂运动控制系统(E题)(6)数控恒流源(F题)(7)三相正弦波变频电源(G题)第八届(2007年)全国大学生电子设计竞赛题目(1)音频信号分析仪(八)【本科组】(2)无线识别(B)【本科组】(3)数字示波器(C)【本科组】(4)程控滤波器(D)【本科组】(5)开关稳压电源(E)【本科组】(6)电动车跷跷板(F)【本科组】(7)积分式直流数字电压表(G)【高职高专组】(8)信号发生器(三)【高职高专组】(9)可控放大器(D【高职高专组】(10)电动车跷跷板(J)【高职高专组】第九届(2009年)全国大学生电子设计竞赛题目(1)光伏并网发电模拟装置(A题)【本科组】(2)声音导引系统(B题)【本科组】(3)宽带直流放大器(C题)【本科组】(4)无线环境监测模拟装置(D题)【本科组】(5)电能收集充电㈱(E题)【本科组】(6)数字幅频均衡的功率放大器(F题)【本科组】(7)低频功率放大器(G题【高职高专组D(8)LED点阵书写显示屏(H题【高职高专组D (9)模拟路灯控制系统Q题【高职高专组】)。
基于单片机的主从式声音导引系统

( 哈尔 滨理 工大学 机械动力工程学 院 , 黑龙江 哈尔滨 1 0 8 ) 0 0 5
摘 要 : 声音导引在生命探测与定位 中具有重要 的现实意义 , 本文 以单片机为核心 , 于无线传输理论 , 计制作了一声音导 弓 系统。 基 设 J 系统含一个 以车载移动声源为核心的主机 系统和~个 以声音接收器为核心的从机系统。 主从机均 采用 S TC8 C 2单片机作 95
通 信 与信 息 处 理
Comm u i a i n an n or t o es i g n c to d I f ma i Pr c s n on
自 技 与应 》 00 第2 卷 6 动化 术 用 21年 9 第( 期
基 于 单 片机 的 主从 式声 音 导 引 系统
sa e b t e e td STC8 C5 c o o t le sc n r l o e Th l v e e v d s u d sg a r m h a t rt r u h lv oh s lce 9 2 mi r c n r l ra o to r . e s a e r c i e o n i n lfo t e m se o g o c h s u d c n r lc r u t a d d t r i e h o n o r e l c to c o d n o t e tme d f e e c ft o nd sg a s o n o to ic i, n e e m n d t e s u d s u c o a i n a c r i g t h i if r n e o wo s u i n l f o a d o r c i e s t e r l s l r n m i e h sto nf r a i n t h se , O a o o e a e t t rt r m u i e e v r , h n wie e s y ta s t d t e po ii n i o m to o t e ma t r S s t p r t he mo o o t m o e t h a g t o a i n Ex e i e t h w h tt e s se sr cu e i i l , e i b e p r o a c sg o Fu t e v o t e t r e c t . p rm n ss o t a h y t m tu t r ss mp e r l l ; e f r n e i o d. rh r l o a m m o e t y t m sc a a t rz d b i h r la i t , i h p ro m a c — o tr t n o p r, he s se i h r c e i e y h g e i b l y h g e f r n e c s a i a d l w owe o s mp i n i o rc n u to . K e r :s u d g i a c S y wo ds o n u d n e; TC8 C5 wie e s ta s s i n DC o o 9 2; r l s r n mi so ; M tr
声音定位引导系统设计

1 系统设 计
系统分 为声 音检测 单元 ( 主机 ) 和可移 动 声源
( 从机 )两个子系统 。主机利用 传声器接 收从机发 出
的周期性音频 脉冲信 号 ,经过前级信号整形 ,完成信
号 的检测 ,然后对采集 的声音信号进行处理 ,计算 出
控制指令 传输至可移动声源 ,并引导其运动 ,直到可
3 自制声 个
音 频 信 号接 收
主机 MCUA ME T GAI 6
音频 信 号发 送
L —7 _
I进 机 动 I 步电驱器
从 机MCU
( 计算 时 间差 和发 送控 制 指 令1
无线 发射
( 产生音频信号 )
无 线 接 收
I
A ME A 6 T G l
( nier gT a igC ne ,Taj nvr t o eh ooya dE u a o ,Taj 0 2 2 hn ) E gnei ri n et n n r ini U iesy f cn l n d ct n i i 3 0 2 ,C i n i T g i nn a
声音定位 引导 系统 ,是基于无线通信技术 的新型 引导系统 ,可以应用在新 型智能机器人控制 系统 、视 频会议 、语音识别 、说话人 识别 、目标定位 以及助 听
装置等领域 。声音定位引导 ,在现实生活中有着 重要 意义 。例如 ,在救援抢险 中,可 以利用声音传感 器接 收某一特 定幅度 或者频 率的声音 ,通过对声音源 的分 析处理来获 知其地 理位 置 ,配合 G S卫 星定 位技 术 P
来搜救 目标源… 。 声 音引导 系统包 含 1 可移 动声源 s 个 ,3个声 音 接收器 A、B和 C,其 位置 示意 图如 图 1 示 。3个 所 声音接收器与可移动声源之间的距离不同 ,所接 收到 的声音信号 的时 间不 同。根据所接收到信号的时间差 可计算 出可移动声源 的位置 ,并通过无线传输方式将
声音导引智能系统

( D e p a r t m e n t o fE l e c t r o n i c E n g i n e e r i n g , X i ’ 觎A e r o n a u t i c a l P o l y t e c h n i c I n s t i t u t e , Xi ’ 帆 7 1 0 0 8 9 , C h i n a )
( 西 安航 空职 业 技 术 学院 电子 工 程 学 院 ,陕 西 西安 7 1 0 0 8 9 ) 摘 要 :设 计 采 用 MS P 4 3 0单 片机 作 为 核 心 器件 的声 音 导 引智 能 系统 . 可 以 实现 对 电机 控 制 、 A S S P芯 片 以及 显 示 模 块 、 语 音 收发 、 无 线 收发 模 块 的控 制 , 应 用 多通 道 两相 四 线 式 步进 电机/ 直 流 电机 控 制 芯 片 A S S P芯 片 , 实现 对 可 移 动 声 源 的运 动 控 制 。 系统 通过 语 音 收 发 模 块 实现 可移 动 声 源 的定 位 , 并通 过 无 线 收 发 模 块 进行 对 可移 动 声 源 的 运 动控 制 。 同 时应 用 Z X 2 4 0 1 2 8 M1液 晶 显 示 , 可以显示过程 的测量响应时 间、 可 移 动 声 源 的起 始位 置 到 O X 线 的 垂 直距 离及 平 均 速度 。整 个 系统 具 有 人 性 化 。 智能化等优点。
第 2 1 卷 第 1 4期
Vo 1 . 21
No . 1 4
电 子 设 计 工 程
El e c t r o n i c De s i g n En g i n e e r i n g
2 0 1 3年 7月
盲人空间设计要点

盲人空间设计要点
盲人空间设计的要点包括以下几个方面:
1. 无障碍通行:设计应保证盲人顺利通行,避免障碍物,如凸起的地板、突出的障碍物等。
地面应平坦,无高低差,并提供导引系统,如盲道、凸标识等,方便盲人正确走向目的地。
2. 触觉辨识:在设计中应该考虑到盲人的触觉需求,使他们能够通过触摸感知环境信息。
例如,在地面上使用不同材质的材料或纹理,以帮助盲人识别位置和方向,使用凸起的标识物或标志,使盲人能够触摸辨认。
3. 声音导引:为盲人提供声音引导是非常重要的。
可以设置语音提示系统或导览系统,通过语音指示盲人的位置和方向,帮助他们准确导航。
同时,设置警示音或报警装置,以确保盲人的安全。
4. 视觉辅助:尽管盲人无法看到,但仍然可以通过听觉和触觉辅助设备来获取信息。
设计中可以考虑使用盲文、大写字母、凹凸纹路或凸起字体等方式,以帮助盲人识别和阅读信息。
另外,可以设置指示灯或发光装置,以增加盲人对周围环境的感知。
5. 安全保障:盲人的安全是最重要的。
设计时应确保室内无危险物品,尽量避免棱角和尖锐物体。
在楼梯、斜坡等区域设置防护栏杆和扶手,提供可靠的导引系统,以确保盲人的安全通行。
总体来说,盲人空间设计要考虑到他们的感知和导航需求,提供无障碍通行的环境,并提供触觉、听觉和视觉辅助设备,以增加他们对环境的感知和安全性的保障。
同时,在设计过程中应考虑与盲人进行沟通和咨询,以了解他们的需求,从而更好地满足他们的实际需求。
声音与建筑结合的设计方法
声音与建筑结合的设计方法声音与建筑的结合设计方法是通过合理配置和运用声音的元素来创造出与建筑相融合的音效环境,以提高建筑环境的舒适性和功能性。
下面将介绍几种常用的声音与建筑结合的设计方法。
首先是声音隔离设计。
声音隔离是指通过设计手段降低传声途径向建筑内部传递的声音量和振动幅度,从而减少建筑内部的噪声污染。
常见的声音隔离设计方法包括选择合适的材料与构造、使用隔音门窗、采用空气隔离和减少共鸣等。
同时,还可以设计出合理的声学断墙或装置,将声音从源头上进行控制,以实现声音的隔离效果。
其次是声学设计。
声学设计是通过合理设计建筑内部的音响系统和声学处理,以提高建筑内部声音的余响、吸音、演奏效果等,使其与建筑相适应。
常见的声学设计方法包括选择合适的材料与构造、设计合理的吸音装饰面、调整房间的形状和体积、设置声学隔振装置等。
此外,还可以利用数字声学技术,通过合理的声学模拟和设计,来优化建筑内部的声音效果,提高声音的逼真度和立体感。
再次是声景设计。
声景设计是指通过合理设置和运用环境声音来创造出与建筑相匹配的声音场景,从而提升建筑的整体氛围和舒适性。
常见的声景设计方法包括音乐背景的选择和播放、环境音效的设置和控制、灯光和声音的结合呈现等。
声景设计可以使人们在特定的环境中产生情感共鸣,从而使建筑环境更加生动和具有吸引力。
最后是声音导引设计。
声音导引设计是通过合理设置和运用声音,来引导人们在建筑内部的行为和活动。
常见的声音导引设计方法包括使用导向音效、语音导览、音频地图等。
这些设计方法可以有效地指引人们在建筑内部进行导航和定位,提供便利的服务和信息,同时也可以增强人们对建筑的认知和体验。
综上所述,声音与建筑的结合设计方法包括声音隔离设计、声学设计、声景设计和声音导引设计等。
这些设计方法可以有效地提升建筑环境的舒适性、功能性和吸引力,为人们创造出更加宜居和富有艺术感的生活空间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2009全国大学生
电子设计竞赛设计报告
编号B甲4512
题目声音导引系统
学生姓名王超孔祥江张彦杰
专业07物理学、07电科、08机自本
指导教师张福安葛汝明
作品名称:声音导引系统
制作人:王超孔祥江张彦杰
摘要:本系统以凌阳SPCE061A单片机作为控制核心,其中驱动模块使用了NEC公司提供的ASSP 芯片作为时序发生器。
由于它可以进行细分操作,所以可使小车能精确的找到目标线。
最终定位误差可控制在0.7cm左右。
声音的发生及其接收部分电路分别是用分立元器件搭建而成,其中接收部分可以在三米范围内检测到声音。
无线通信部分用了CF905进行数据传输,此模块具有传输数据距离远,系统稳定等特点,可以很好的完成题目的要求。
主控单片机根据三点收到信号的时间差确定小车的相对位置,从而控制小车到达指定位置。
小车在运行中用液晶实时显示时速及时间。
当小车到达指定位置后,会有语音播报提示。
关键字:凌阳SPCE061A,ASSP,无线传输CF905,声音检测
Abstract:The voice guidance system is composed of SPCE061A for the control of the core ,the free movement of car (fore ASSP chip-driven DC motor to achieve the free movement )as a carrier of the soundsource ,Sound soice in center line OX on the rignt to issue a certain cycle of any given location ,the frequence of the audio signal ,ABC3 audio mathematical treatment computable a aloud source 。
WTP Wireless Transmission use CF905 to carry data to the main control CMU.the mian CMU based on the time of recive of the voice ,make a control information whice is transported to the follow CMU.The follow MCU control the car to the era where we want it go .when it get to the station ,a voice from the speaker will tell us it has make it.
Keyword: SPCE061A, WTP Wireless Transmission, CF905,voice detector
1.系统方案
1.1系统总体方案及结构框图
根据题目要求,本系统主要由电源模块、控制模块、电机驱动模块、声音发生模块、声音检测模块、无线收发模块、显示模块等构成。
系统的结构框图如图1.1所示。
1.2方案论证与比较 1.
2.1控制器模块
方案一:采用ATMEL 公司的AT89C51作为控制核心 。
51单片机价格便宜,应用广泛,但运算速度较低,内部资源较少,功能单一,且自身功耗相对较高,难以满足系统要求。
方案二:采用SPCE061A 单片机进行控制。
凌阳61单片机16位微控制器,处理速度快,并且其具有5V 、3.3V 两种工作模式,而无线模块需要3.3V 供电,凌阳61单片机正好可以满足这种要求。
综合考虑以上两种方案,结合题意,我们选用方案二。
1.2.2显示模块
方案一:采用LED 数码管显示。
数码管显示具有亮度高、夜视效果好等优点,但显示信息量小,且自身功耗较大。
方案二:128X64点阵LCD 液晶显示。
LCD 液晶可轻松实现字母、汉字、图像等的显示,控制简单,但是价格较高。
综合考虑以上两种方案,结合题意,我们选用方案二。
1.2.3电源模块
方案一:采用开关直流稳压电源。
开关电源功率大,效率高,但是纹波大,价格相对较高。
方案二:采用线性直流稳压电源。
线性稳压电源制作简单,输出稳定,性价比较高。
综合考虑以上两种方案,结合题意,我们选用方案二。
1.2.4 无线传输模块
方案一;采用集成块RF905进行无线数据传输。
集成块精度高,稳定,但是价格相对较高。
方案二:用分立元件搭建无线传输电路。
分立元器件搭建的电路稳定性差,抗干扰能力弱。
综合考虑以上两种方案,结合题意,我们选用方案一。
电源模块
声音发生模块 控制器模块
声音检测模块 无线收发模块
语音、液晶显示模
电机驱动模块
上位机
无线模块
图1.1 系统方框图
1.2.5
声音接收模块
方案一:用声音传感器检测。
用专门传感器灵敏度高,检测范围广,但价格相对较高。
方案二:采用麦克接收声音,并由比较放大电路处理输出一个单片机可识别的信号。
电路简单,由分立元器件搭建便可实现功能。
综合考虑以上两种方案,结合题意,我们选用方案二。
1.2.6
声音发生模块
方案一:用蜂鸣器作为声源,外围电路简单,但蜂鸣器发出的声音波形不合题目要求。
方案二:采用自制电路,产生音频信号,再经功率放大等驱动扬声器发声。
此音频信号频率可调且单一,便于检测。
综合考虑以上两种方案,结合题意,我们选用方案二。
1.3系统设计
加整体框图
通过对系统的整体考虑,控制模块采用凌阳16位单片机控制,显示模块采用液晶实时显示小车行驶时间及相应坐标,当小车到达指定位置时有语音提示。
发声模块采用R、C振荡电路产生音频信号,并进行功率放大驱动扬声器发声。
无线发射接收模块采用RF905集成块,通过此无线模块将信号传给主控MCU,MCU根据信息做出处理,控制小车做相应运动。
2.理论分析与计算
1.假设某一时间,ABC三点与移动声源的距离分别是h1/h2/h3,它们接收到声音的时间分别为t1/t2/t3,计算出t1与t2、t2与t3、及t1与t3之间的时间差分别为òt1/òt2/òt3,当òt1为零时小车转向垂直于OX方向行驶,当òt2等于零时,小车停止。
2根据公式 fo=1/2лRC ,选择合适的R、C参数,使振荡器产生一个一定频率的音频信号,然后通过功率放大,驱动扬声器发声。
3.电路与程序设计
1.音频发生电路:采用RC振荡电路产生音频信号并进行功率放大,再驱动喇叭发声。
RC 振荡电路产生的音频信号需经模拟开关斩波,得到一个频率的音频信号。
信号周期可由
PWM波的频率确定。
电路原理图见图一
2.声音接收电路:麦克将接收到的音频信号转化为一个微弱电信号,经放大比较后得到一个可由单片机直接识别的信号,送单片机处理。
电路图见图二
3.无线接收模块采用RF905集成块,见图三
4.步进电机驱动模块是由NEC芯片及L298驱动芯片搭建,此电路由于NEC的应用,变得简单,易于操作。
芯片图如图一
图一NEC芯片图
5.主控部分是由凌阳单片机系统组成,系统图见图二
图六单片机系统框图
6.显示模块用的是12864液晶,语音是利用凌阳语音模块搭建。
7.总程序框图如图七
图七 总程序框图
4. 系统测试与结果分析
测试结果
测试次数
停止后定位误差
行驶中定位误差
平均车速
第一次 3.3cm
5.5cm
7.2cm/s 第二次 2.6cm
4.5cm
6.9cm/s
第三次 2.9cm 4.5cm 6.2cm
第四次 2.2cm 4.7cm 6.5cm/s
第五次 1.6 2.5 9.8m/s
第六次0.5 1.5 10.7m/s
第七次0.9 2 10.3m/s
第八次0.7 1.8 10.4m/s
5.总结
经过四天四夜的奋战终于完成了声音导引系统的全部基本部分及大部分发挥部分。
由于使用了可以细分的NEC芯片,从而使小车运行更加灵活,经过反复调试,终于将小车由停止时定位误差2.7cm左右试逐渐缩小到0.7cm左右,已经到达到题目发挥部分1cm的要求。
并且行驶中的定位误差也被缩小到3cm之内。
四天中收的不只是努力汗水后成功的喜悦,更多的是过程中的点点滴滴。
在制作过程中我们虽然遇到过很多困难,但是在我们小组成员的团结努力下,最终使得该作品的各项技术指标都达到了题目的要求。
参考文献
[1] 杨振江.新型集成电路[M],西安电子科技大学出版社,
[2] 邱关源.电路[M],高等教育出版社,1999
[3] 康华光.电子技术基础[M],第五版高等教育出版社,2005
[7] 吴麟.自动控制原理清华大学出版社,。