基于PIC16F873单片机的动态电力补偿控制系统
基于单片机PIC16F877控制的路灯节能控制器设计
基于单片机PIC16F877控制的路灯节能控制器设计路灯在城市道路和居民区的照明中起着至关重要的作用,然而传统的路灯系统通常采用定时开关控制方式,这种方式存在能源浪费的问题。
为了解决这一问题,我们可以采用基于单片机PIC16F877控制的路灯节能控制器设计。
本文将介绍这一控制器的设计原理、硬件和软件实现以及性能特点。
一、设计原理基于单片机PIC16F877控制的路灯节能控制器的设计原理是利用单片机的智能控制功能,通过光敏电阻感应周围环境的亮度,实现根据实际光照情况自动调节路灯亮度的功能。
通过降低路灯亮度,在保证路灯照明效果的前提下,可以有效节约能源消耗,延长路灯的使用寿命,降低维护成本,同时也能减少光污染,对环境保护具有积极的作用。
二、硬件设计1.光敏电阻模块光敏电阻是一种能够根据光照强度改变电阻值的元件,通常用于光敏控制电路中。
在本设计中,光敏电阻模块通过感应周围环境的光照强度,并将其转换为电信号输入到单片机的模拟输入引脚,作为亮度感应的输入信号。
2.功率调节模块功率调节模块采用可调电阻和三极管等元件组成,通过单片机的数字输出引脚控制功率调节元件的通断,实现对路灯亮度的调节。
3.继电器模块继电器模块通过单片机的数字输出引脚控制继电器的通断,实现对路灯的开关控制。
4.显示模块显示模块采用液晶显示屏,用于显示路灯当前的亮度和工作状态。
电源模块提供所需的电压和电流,保证整个控制器的正常工作。
1.初始化设置在软件设计中,首先需要进行单片机的初始化设置,包括模拟输入引脚、数字输出引脚和定时器等模块的设置,以及串行通信接口的初始化设置。
2.光照感应通过模拟输入引脚获取光敏电阻模块传感到的光照强度信号,并进行相应的信号处理,得到当前的亮度值。
3.亮度控制根据当前的亮度值,通过数字输出引脚控制功率调节模块,实现对路灯亮度的调节。
当光照强度较强时,降低路灯亮度;当光照强度较弱时,提高路灯亮度。
4.开关控制5.显示控制通过串行通信接口将当前的亮度值和工作状态发送到液晶显示屏上进行显示。
【国内标准文件】基于PIC16F877和IGBT设计的小型发电机逆变电源

基于PIC16F877和IGBT设计的小型发电机逆变电源中频汽油发电机作为一项重要的电能源,在需要备用电源和流动性作业的场合具有重要作用。
其特别适用于野外、矿山施工作业,企事业单位备用电源以及灾后小功率临时用电,具有简单可靠,便于维修等特点。
由于汽油发电机输出的是频率和电压都与市电不同的三相交流电,电压和频率的值比较高,不符合大多数用电设备的使用要求,而且输出电压随负载的变化波动较大,因此需配备自动电压调节器(AVR)使输出电压和频率在负载变化时达到稳定。
传统的模拟控制方法输出电压质量差,耗能大。
而随着计算机技术和电力电子控制技术的发展,数字化、智能化控制已成为逆变电源发展的必然。
与传统的控制方法相比,微机控制的中小型汽油发电机逆变电源设计灵活,系统可靠,能实现实时的监控和诊断。
但目前的产品大多只有一种模式,即满载工作方式,不能实现转速随负载的变化而实时调节。
主要原因是汽油发电机的精确数学模型在实际运行中较难得到,传统的基于线性系统的控制方法容易导致不良的动态过程或系统不稳定。
本设计采用非线性方法来解决这一问题,将模糊控制应用到控制系统中去。
汽油发电机的油门采用步进电动机进行控制,整个系统分为节油模式和满载模式,在负载频繁变动的场合采用满载模式,其他场合采用节油模式,根据负载的变化自动调节发电机油门,整个系统通过硬件和软件上的灵活设计保证其在节油降耗的基础上具有良好的稳定性和动态性能。
基本工作原理汽油发电机常被作为移动式的独立电源来使用,主要由汽油机、同步交流发电机和控制器组成。
设计中所用汽油机发出的三相交流电频率为350~640Hz,电压为300~550V,通过三相整流桥变成直流高电压,然后经过降压环节(降压变换器)降至350V左右,最后通过逆变环节和LC滤波器变换成220V/50Hz的交流电供负载使用。
为了降低主电路的开关损耗,逆变器采用单极倍频电压型SPWM软开关DC/AC变换电路。
控制电路以单片机为中心,为使输出电压在负载变化时能够稳定,首先在降压环节中引入了传统的PID控制算法,将降压环节输出电压稳定在350V,以使逆变器输出稳定的220V/50Hz的交流电。
基于PIC16F873单片机的步进电机控制系统

基于PIC16F873单片机的步进电机控制系统
控制具有功能灵便多样,脉冲输出精确,实时性强等特点,通过软件设计可以实现各种复杂的控制,其系统成本较低,近些年来已被广泛应用在各种不同的运动控制系统中。
在实际应用中,若步进电机在升降速时,脉冲频率的变幻不合理,就会使电机失步或者过冲,使系统无法做到精确定位;同时,因为系统迅速性的要求,电机需要很快地完成加减速过程。
这里设计了基于单片机的步进电机控制系统,分析迅速性最好的指数型加减速曲线在实际系统中的应用逻辑,提出了一种升降速曲线的优化办法,采纳了硬件、软件抗干扰技术措施。
可以通过键盘输入数据与命令,并能通过旋钮便利地实现电机的延续调速,实时设置与显示步进电机的工作方式。
2 控制系统总体计划设计
系统功能原理暗示图1所示。
在该系统中由单片机挺直输出电机的各相控制脉冲序列,光耦举行须要的光电隔离,采纳分立元件构胜利率管驱动,带动电机转动。
键盘接口与显示功能由具有SPI串行接口功能的ZLG7289实现。
既可用法按键输入的方式精确设置电机的工作方式与转速,也可以通过调速旋钮实现电机转速的延续调整,还能通过上位微机实现对电机工作方式的调节与控制。
3 硬件电路设计
3.1 控制电路设计
控制芯片采纳PIC16F873,该单片机具有抗干扰能力强,超低功耗。
芯片自带硬件,具有高速SPI通信端口,6通道10位A/D转换,2路输出,8 KB容量的FLASH存储器,368 B容量的SRAM,3个定时器,1个SPI串行通信口。
因为单片机内部的资源丰盛,性价比高。
能够满足该设计的要求,而且削减硬件电路的设计,提高工作效率。
单片机
第1页共6页。
基于PIC16F873单片机的步进电机控制系统

基于PIC16F873单片机的步进电机控制系统作者:黄法,孔秀华来源:《现代电子技术》2009年第12期摘要:单片机控制步进电机具有功能灵活多样,脉冲输出准确,实时性强等特点,已被越来越广泛地应用在各种不同的运动控制系统中。
该设计使用PIC16F873单片机,可以通过键盘输入数据与指令,并能通过旋钮方便地实现电机的连续调速,实时设置与显示步进电机的工作方式。
采用一种升降速曲线的优化方法,解决步进电机在升降速过程中脉冲频率的变化不合理,使系统无法做到精确定位的问题;优化步进电机的驱动电路,采用硬件、软件抗干扰技术措施,使整个系统工作稳定可靠。
关键词:PIC16F873;ZLG7289A;升降速曲线的优化;抗干扰技术;控制系统中图分类号:TM383.6;TP368.1 文献标识码:A文章编号:1004-373X(2009)12-175-04Stepping Motor Control System Based on PIC16F873 MCUHUANG Fa1,KONG Xiuhua2(1.Training Center for Vocational Skills,Weihai Vocational College,Weihai,264210,China;2.Shandong Jiaotong University,Weihai,264200,China)Abstract:Stepping motor controlled by single chip computer is applied widely in various motion control system because of the characteristics of flexible function,accurate outputting pluse and strong real-time etc.PIC16F873 is used in the design,stepping motor speed can be changed by data and instructions entered through the keyboard and can be continuously changed by rotatingbutton,working mode and setting of motor is real-time displayed.The variation of unreasonable pulse frequency causes the matter that system can not realize accurate location in the course ofrise and fall-speed of stepping motor.The matter is solved by adopting an optimized method.Driving circuit of stepping motor is optimized,anti-interference technique is adopted in software and hardware.The whole system runs stably and reliably.Keywords:PIC16F873;ZLG7289A;optimization of the rise and fall-speed;anti-interference technique;control system0 引言单片机控制步进电机具有功能灵活多样,脉冲输出准确,实时性强等特点,通过软件设计可以实现各种复杂的控制,其系统成本较低,近些年来已被广泛应用在各种不同的运动控制系统中。
基于PIC16F873A单片机的温控阀门的低功耗设计

河 北 工 业 科 技
H ebei Journal o f Indust rial Science and T echnolo gy
Vo l. 28, N o. 2 M ar. 2011
文章编号 : 1008 1534( 2011) 02 082 03
基于 PIC16F873A 单片机的温控阀门的低功耗设计
图1
Fig . 1
温度控制器原理图
T emperature contr oller diag ram
1. 2
软件设计
主程序每 10 min 采集 1 次室温, 根据与设定温 度的比较和当前阀门的状态, 决定对阀门的开关动 作, 动作完毕后单片机进入休眠。同时 , 当按键发生 时, 调用相应的中断处 理程序, 进行温度设定 等操 作, 并重置计时。具体的主程序流程和中断程序流 程如图 3 所示[ 4 5] 。
2
性能评价与优势
传统的恒温控制阀结构包括恒温传感器和温控
7) 人性化, 当电池电量过低或传感器损坏时, 温 控器提示错误, 并将阀门置为开启状态 ; 采用看门狗 技术 , 当程 序运行 错误时 , 自 动重启 , 确 保用热 可 靠性。
阀体 2 部分, 其中内置式恒温传感器中有感温包 , 当 室温上升时, 感温包内的特殊液体转化为气体, 感温 包内的气体压力随之上升 , 由此升高的压力将阀杆 向下推动 , 关小水流。相反, 当室温下降时 , 使波纹 管收缩 , 阀杆回复到张开位置, 这种感温液体的物理 变化, 使阀杆上下调节 , 以维持温度的恒定。它具有 如下几个缺点 : 阀门阻力非常 大, 严重 影响采暖平 衡 ; 易损、 易堵 , 无法直观显示室内温度; 受外界因素 影响较大, 如阳光。 相比之下 , 本 系统 的 性 能 优 势 较 明 显, 具 体 如下。 1) 超低功耗 , 休眠电流 < 18 A, 电压工作范围 为 3. 7~ 7 V 。 2) 测温精度高 , 采用高精度温度传感器 , 分辨率 为 0. 062 5 ! , 在 10~ 40 ! 测温误差在 ∀ 0. 125 ! 以内。 3) 阀体内部为铜轴和塑料结构, 不生锈 , 而且动 力为 2 N ∃ m, 不易堵塞。 4) 不受外界因素影响, 控制精度高, 阀门动作精 度为 ∀ 0. 3 ! ; 阀门阻力小到可以忽略。 5) 操作方便, 设定温度只用 加 键和 减 键 , 能 直观显示室内温度 , 设定温度和阀门的状态。 6) 安全, 系统动力能源采用 4 节 5 号干电池提 供 , 与市电隔离, 不存在安全隐患。
基于PIC16F873机车温度控制阀的检测装置的设计

作者简介:王同宏 男 电气工程系 副教授 1基于PIC12F629的两位大数字LED 机车速度表的设计王同宏[文章摘要] 本文介绍了一种基于PIC12F629制作的两位大LED 数字机车速度表的设计,详细说明了两位大LED 数字速度表的工作原理、器件的选择及设计方法。
该速度表结构简单,通用性强,修改其部分控制程序和输入方式可以将其应用在需要两位数字显示的温度、压力、速度及计数等场合,具有较高的实用价值。
[关 键 词] PIC12F629 数字LED 74LS164 ULN2003A 自动调光调车机车采用指针式速度表,调车机车正常运行速度不高于60KM/小时。
在监控系统中,指针式速度表很难定量地反映出机车的实际运行速度,因此需要加装一个两位的大LED 数字速度表,用于反映机车的实时运行速度。
两位大数字LED 速度表的实现有很多种方法,在众多的实现方法中,使用单片机进行设计是比较简单方便的设计方法。
制作关键是两位大数字LED 的驱动方法的选择,对数字LED 进行并联动态驱动还是串联静态驱动又是一个两难的选择:并联动态驱动需要使用单片机的口线多,但外围元件相对较少;串联静态显示使用单片机的口线少,可外围元件相对较多。
通常情况下,管脚多的单片机附加功能也多、价格高,因此使用管脚少的单片机开发的产品成本比较低。
在本设计中,仅实现机车速度检测与显示,功能比较单一;使用三英寸的大LED 数码管,驱动电流比较大;并要求具有自动调光功能;由于在监控下使用,静态显示没有动态显示的频闪现象,显示数字稳定清晰,所以选用串联静态显示;考虑以后功能或程序的改变的方便,采用了只有8脚的FLASH 芯片PIC12F629单片机进行设计。
一、两位大数字速度表的硬件组成: 两位大数字LED 机车速度表的结构功能如图一所示:图一 速度表功能结构图1.单片机的设计PIC12F629是微芯公司推出的8脚FLASH 型单片机,有1K 字节的FLASH ROM ,64字节的RAM 及128字节的EEPROM ,两个计数器,时钟频率高达20 MHz 。
基于PIC16F873A的步进电机远程控制
基于PIC16F873A的步进电机远程控制作者:侯艳红来源:《科学之友》2009年第17期摘要:PIC系列单片机是美国Microchip公司生产的高性能价格比的标志产品,CPU采用RISC结构,分别仅有33,35,58条指令,采用Harvard双总线结构,运行速度快,低工作电压,低功耗,较大的输入输出直接驱动能力,价格低,小体积。
在办公自动化设备,消费电子产品、电讯通信、智能仪器仪表、汽车电子、金融电子、工业控制不同领域都有广泛的应用。
关键词:PIC16F873A单片机;步进电机;定位中图分类号:TP273文献标识码:A文章编号:1000-8136(2009)17-0144-02近年来,网络远程控制技术发展日新月异,它利用网络作为控制器与被控对象之间的信号传输媒介,打破了传统控制距离的局限性,因此,应用范围越来越广泛。
电机作为一个执行部件,对它进行远程控制、驱动,意义重大。
本文所述步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
通过来自PC机的命令信号,单片机然后经过处理成脉冲信号,再由驱动芯片完成功率驱动。
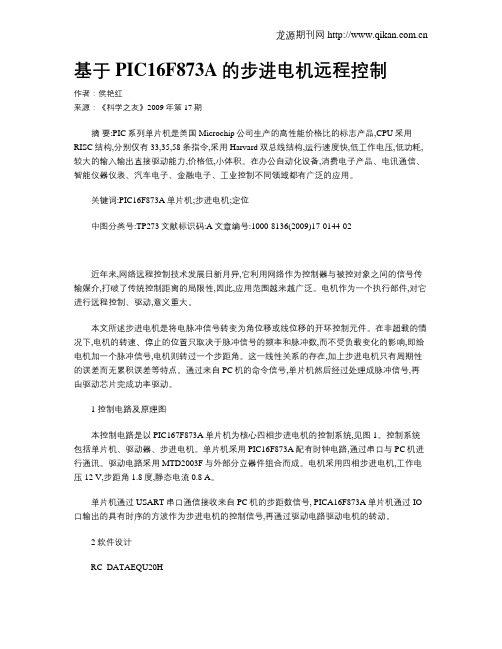
1 控制电路及原理图本控制电路是以PIC167F873A单片机为核心四相步进电机的控制系统,见图1。
控制系统包括单片机、驱动器、步进电机。
单片机采用PIC16F873A配有时钟电路,通过串口与PC机进行通讯。
驱动电路采用MTD2003F与外部分立器件组合而成。
电机采用四相步进电机,工作电压12 V,步距角1.8度,静态电流0.8 A。
单片机通过USART串口通信接收来自PC机的步距数信号, PICA16F873A单片机通过IO 口输出的具有时序的方波作为步进电机的控制信号,再通过驱动电路驱动电机的转动。
基于PIC16F887的锂离子动力电池保护电路设计

电 池 组
负载或
充电器
图 l 保护 电路原理 图
五路 电压采样 电路分别 对各 个 电芯进 行 电压采 样 得 到 电芯 正极 对 地 的 电压 后 , 入 PC1F 8 送 I 6 8 7的 IO / 口, 经过 PC 6 87的 A/ I 1F 8 D转换 后 , 把相 邻两 节 电芯 正极 对 地 的 电压 分 别 相 减 , 到 单 节 电 芯 的 电压 。当 得 所有 电芯 的 电压 均在 过放 检测 电压 25V 和过 充 检测 电压 4 3V 之 间时 , . . 电池 正 常充放 电 ; 当任 何一 节 电芯
基 于 P 1F 8 I 8 锂 离 子 动 力 电池 保 护 电路 设 计 C 6 7的
刘 文昊 ,陈敬远 沈 , 炜 ,金 俊
(.浙江理 工大学信 息 电子学院 , 州 30 1 ;2 1 杭 1 0 8 .浙江传媒 学院,杭 州 3 0 1 ) 10 8 摘 要 :为 了提 高锂 离子动 力 电池的安全性 , 延长 电池的使 用寿命 , 设计 了一种 基于 P C 6 8 7的锂 离子 动力 I 1F 8
浙 江理 工大 学学报 , 2 第 5卷 , 6期 ,08年 1 第 20 1月
J u n l f h j n c TehUnv ri o r a o ei gS i c ies y Z a — t
Vo . 5 1 2 ,No 6 . ,No . 2 0 v 0 8
文章编号 :17 — 8 1(0 8 0 — 6 50 6 33 5 2 0 ) 60 8 — 4
副
为此, 结合锂离子动力电池的充放 电特点 , 设计了一种 以 PC 6 8 7 I 1F 8 为核心的锂离子动力电池保护电路。
于PIC16F873单片机的动态电力补偿控制系统
基于PIC16F系列单片机的闭环控制系统设计

[ ]V Ipu 1 X lg&pa yt ln eV p - p 0 l Ss ms i c p lVp l. y e Ala [ ] H wetPcad C roai . H IA U e%Gud. H wet 2 e lt akr op r o t n P VS sr ie e lt
系统 . 运行 电机 具 有 良好 的 动 态 性 能 和 稳 态 性能 。 使
关 键 词 :P C 6 9 7;闭环 控 制 ; d u I1F 1 mo b s协 议
等特点 , 并且可 以实现相应 的算法。它体现了单 片机发展 的一 种趋势 , 正在逐渐成为世界单片机的新潮流。本文 的闭环控制 系 统 就 是 基 于 PC单 片 机 的 这 些 优 点 实 现 的 ,I IF系 列 采 I PC 6 用 的是 1 4位 的 R S IC指 令系 统 , 保持低 价的前 提下增 加了 在 A D, / 内部 E P O E R M存储器 , 比较输 出 , 捉输入 ,WM输 出, 捕 P I I C和 S I 口, P接 异步串行通信接 口, 模拟 电压比较器 ,C L D驱动 , F A H程序存储器等许多功能 , LS 是一种陛价比非常高的芯片。 该 系统 以 PC 6 9 7为平台 , 以使用其 U R I 1F 1 可 A T模块 建立 单片机和 P C机 的串 口通 信 , 下行数 据发送 命令 , 行数据 反 上 映电机运行状况。使用 A D模块采样 电压 电流反馈 电路产生 / 的 电压 电 流参 数 , 些 参 数 可 以供 上位 机 分 析 并 以 图 形 的方 这 式显示 。使用捕 捉输入通 道和定 时中断计算光 学编码器 产生 的 脉 冲 间 隔 时 间 , 而 可 以 计 算 出 电机 转 速 。 进
基于单片机PIC16F873A无刷直流电动机控制器的研制

基于单片机PIC16F873A无刷直流电动机控制器的研制作者:吴欣来源:《中国科技博览》2017年第18期[摘要]本文介绍了基于单片机PIC16F873A的无刷直流电动机控制器的硬件结构,软件设计以及调速方案的具体实现。
本控制器采用电流单闭环控制策略,PWM调速方式对无刷直流电机进行控制。
经过验证表明,控制器结构简单,性能稳定可靠,调速效果良好。
[关键词]PIC16F873A,无刷直流电机,PWM,调速中图分类号:TM33;TP368.12 文献标识码:A 文章编号:1009-914X(2017)18-0108-011 引言PIC16F873A是Microchip公司生产的一款具有RISC结构的高性能中档单片机。
该单片机稳定性好,引脚具有的防瞬态能力给系统提供了稳定保障。
由于该芯片价格便宜,性能稳定,本控制器设计的基于单片机PIC16F873A的无刷直流电动机调速系统具有实际应用价值。
2 硬件设计2.1 控制器的硬件框图本系统采用电流单闭环,二二导通的换相控制方式,并设计了欠压,过流,堵转等保护方式,并经过长期实践证明,系统可靠性高,抗干扰能力强,硬件设计简单。
本系统的硬件结构框图如图1所示。
2.2 系统的主电路系统的主电路如图2 所示。
三相功率桥主电路是由6个IGBT FGA25N120构成。
本控制系统中电机额定电压100V,额定电流3A。
FGA25N120该器件最高工作电压1200V,最大电流25A,完全满足该系统。
图2 中采用全桥结构可提高电机绕组的利用率,通过对6个功率的开、关控制,对电机电压、电流波形进行调制,使BLDCM产生持续不断的转矩。
主回路中加了一个采样电阻RS优点就是可以省去一路霍尔电流传感器,使电路结构更简单。
在功率管G、S端并入电阻R目的是防止功率管悬空时有电流,导致功率管烧毁。
2.3 隔离驱动电路隔离驱动电路为一路上下桥臂的隔离驱动电路,驱动一组上下功率管。
输入信号A1+和A1是从GAL16V8输出的。
基于PIC16F87X系列单片机直流调速控制器的设计_宋炳菲【参考2书】

幅值变大的矩形电压,加在直流电动机电枢上,通过调节 PW M 宽度可 以调节转速。PW M 宽度的调节可通过给定的调节而调节,而改变给定 即可改变转速。
四、硬件电路设计 1.输入给定电路图
2.速度反馈电路
图 3 给定电路图
图 1 PW M 调速原理图 由图 1 可以看出: U d= (Ton/T)U s,ρ=Ton/T=U d/U s 为 PW M 波形的电压占空比。这样通过 改变 ρ 就可以实现电压 U d 从 0 到 U s 之间连续可调。虽然电压信号是断 续的,但因电动机是一个大电感,并且转子里还加上一个续流二极管这 样就会使电流连续,又加上电压信号频率很高,到少 1 到 4K H Z,所以电 流就会很平滑,接近是一条直线,对速度影响并不大。 三、单片控制的直流 P WM 调整流方框图
— 148 —
科技信息
高校理科研究
PW M 信号的周期可以通过向 PR 2 中写入数值来人为设定。其周期 计算公式如下:
PW M 周期 =(PR 2+1)×4Tosc×(TM R 2 预分频值) 其中,Tosc 为系统时钟周期;4Tosc 为指令周期;TM R 2 预分频值可以 为 1,4 或 16。 通过写入 10 位脉宽寄存器,来设置 PW M 信号的脉冲宽度预定值。 其分辩率高达 10 位:8 位寄存器 C C PR 1L 作为高 8 位;C C P1C O N 控制 寄存器的位 5—位 4 为低 2 位。所以的出公式: PW M 脉宽 =C C PR 1L:C C P1C O N <5:4>×Tosc×(TM R 2 预分频值) 计算 PW M 信号的脉宽。其中,C C PR 1L:C C P1C O N <5:4> 代表由两 个寄存器拼装组合得到的 10 位数据;Tosc 为系统时钟周期,TM R 2 为预 分频值,可以是 1,4 或 16。 在这里记载脉冲宽度的寄存器的字长(10 位)大于记载周期的寄存 器的字长(8 位),看上去,脉冲宽度大于周期好像矛盾,其实不是,只是 周期寄存器的精确度高而已。但是如果真的把脉宽寄存器的值设置的 大于了周期寄存器的值那么就会默认为一直是高电平输出。即电压占 空比 ρ=1。 六、软件设计 1.主程序 见图 7。
基于PIC单片机的智能化逆变电源控制系统

基于PIC单片机的智能化逆变电源控制系统
摘要:针对现代电源变频调幅的要求,提出了利用PIC16F873产生SPWM波控制IR2136触发IGBT产生PWM波作用于逆变器产生标准的正弦波形,从而实现变频调幅。
同时利用AD模块对逆变桥输出进行采样并进行滤波处理,实现对系统的PI闭环控制。
通过MATLAB中的SIMULINK组件进行仿真分析,结果表明此方案输出电压动态响应速度快,具有良好的精度控制及实时性、波形失真小、可靠性高。
随着科学技术的进步,电源质量越来越成为各种电气设备正常和良好工作的基础。
电源技术领域的一个持续的研究课题即是研究作为电子信息产业命脉的电源的可靠性和稳定性。
而逆变器作为电源的核心部分,其调制技术很大程度上决定了电源输出电压的质量。
目前最常用的调制技术是正弦脉宽调制(SPWM)。
随着单片机的出现及其广泛应用,智能化控制方法已经逐渐替代传统的分立元件电路产生方法或是专用芯片产生方法。
智能化逆变电源的优势在于它不仅能实现调制信号的输出,还为系统数据参数的监控、处理及显示提供接口。
同时它与现代计算机技术更好地结合产生了故障自诊断和自我保护功能,可提高系统的稳定性。
PIC16F874单片机在直流电机无级调速系统中的应用

PIC16F874单片机在直流电机无级调速系统中的应用现代工业生产中,电动机是主要的驱动设备,目前在直流电动机拖动系统中已大量采用晶闸管(即可控硅)装置向电动机供电的KZ—D 拖动系统,取代了笨重的发电动一电动机的F—D 系统,又伴随着电子技术的高度发展,促使直流电机调速逐步从模拟化向数字化转变,特别是单片机技术的应用,使直流电机调速技术又进入到一个新的阶段,智能化、高可靠性已成为它发展的趋势。
本调速系统采用PIC16F874 单片机作为中心处理器,充分利用了PIC16F874 单片机捕捉、比较、模/数转换模块的特点作为触发电路,其优点是:结构简单,能与主电路同步,能平稳移相且有足够的移相范围,控制角调整量可达10000 步,能够实现电机的无级平滑控制,脉冲前沿陡且有足够的幅值,脉宽可设定,稳定性与抗干扰性能好等。
1 直流电机调速原理直流电动机的转速n 和其它参数的关系可用下式来表示:(1)(1)式中:Va-电枢电压,Ia-电枢电流,Ra-电枢回路总电阻,Ca-电势常数,Φ-励磁磁通。
(2)(2)式中:p-磁极对数,N-导体数,a-电枢支路数。
CaΦ=K (3)(3)式中:当电机型号确定后,CaΦ常数,故式式(1)改变为在中小功率直流电机中,电枢回路电阻非常小,式(4)中IaRa 项可省略不计,由此可见,直流电机的调速当改变电枢电压时,转速n 随之改变。
2 系统工作原理本系统主要由主控开关,电机激磁电路,晶闸管调速电路(包括测速电路),整流滤波电路,平波电抗器及放电电路,能耗制动电路组成,系统采用闭环PI 调节器控制。
当主控开关闭合后,单相交流电经晶闸管调速电路控制后,又经过桥式整流、滤波、平波电抗器后,获得脉冲小,连续的直流,提供给电机,同时,交流电通过激磁电路整流后,使电机获得励磁,开始工作。
调节触发电路中的速度设定电位器RP1,使得当AN1 输入电压减小时,。
基于低功率PIC16F887单片机的控制系统抗干扰能力改进

基于低功率PIC16F887单片机的控制系统抗干扰能力改进马胜利;李邓化;王海【摘要】针对基于低功率PIC16F887单片机控制系统的电磁干扰问题,设计了一种稳定的电容降压电源电路.通过电快速瞬变脉冲群(EFT/B)试验,测试了PIC16F887单片机在不同电源等级中的抗电磁干扰能力,提出了采用两级稳压电路增强电源端抗干扰能力的方法并设计了电路.实验结果表明,低功率PIC16F887单片机控制系统在电容降压电路中能稳定工作,5V系统中的EFT/B抗干扰能力要强于3.3V系统,电源端抗EFT干扰能力达到IEC61000-4-4严酷等级第4级的要求.【期刊名称】《传感器世界》【年(卷),期】2016(022)002【总页数】4页(P14-17)【关键词】单片机;电磁干扰;电容;稳压电源【作者】马胜利;李邓化;王海【作者单位】北京信息科技大学自动化学院,北京100101;北京信息科技大学自动化学院,北京100101;国源容开国际科技(北京)股份有限公司,北京100044【正文语种】中文【中图分类】TP273+.5一、引言随着集成电路工艺的发展,为了降低集成电路的功耗,数字集成电路的电源电压是逐步降低的。
在电子电路设计中,应用最广泛的电源电压等级是3.3V和5V。
目前,从5V系列到3.3V等系列的数字电路芯片的核心电压以及I/O电平都小于3.3V,有的芯片电源电压已经降低到1.2V[1]。
一般说,电容降压电路给单片机供电,具有体积小、低功耗的优点,是变压器降压电源无可比拟的,但是单片机容易损坏、工作不稳定和易受干扰。
本文采用电容降压电路供电,按照IEC61000-4-4标准,对PIC16F887单片机的最小控制系统进行EFT/B试验,并且针对电源端,提出改进电路以增加抗扰能力。
二、电容降压电源传统电容降压直流电路如图1所示[2],其中,R1为限流电阻,防止二极管在上电瞬间由于浪涌电流烧坏,C1为降压电容器,D1为半波整流二极管,D2在市电的负半周时给C1提供放电回路,D3是稳压二极管,其稳压值取决于电源输出电压要求,并注意其最大功率的选取,因为当负载开路时,所有的电流都会流经D3,C2为储能电容,可根据输出纹波要求选择适当容量的电解电容。
基于PIC16F876的直流无刷电机控制器的设计

基于PIC16F876的直流无刷电机控制器的设计
林邦怀
【期刊名称】《机械工程与自动化》
【年(卷),期】2008(000)004
【摘要】介绍了一种基于PIC16F876单片机的直流无刷电机控制器的设计与实现,该控制器完成了电子换相及调速控制.其中,用软件实现了转子位置检测、旋转磁场信号输出及电机PWM调速.
【总页数】3页(P137-138,141)
【作者】林邦怀
【作者单位】广东省华侨职业技术学校,广东,广州,510520
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于PIC18F452的纯电动车用直流无刷电机控制器设计 [J], 林聪;谭光兴;陈赞;闫夏;
2.基于FPGA的直流无刷电机控制器的设计与实现 [J], 陈炳成
3.基于STM8S105的直流永磁无刷电机控制器设计 [J], 张升;王立峰;王爽
4.基于DSP的直流无刷电机控制器的软件结构设计 [J], 黄健平;彭达洲;胥布工;陈斌
5.基于STM32的有感直流无刷电机控制器设计 [J], 孙虎;梁伟;赵麒;周骅
因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机PIC16F87的大功率智能充电机设计

基于单片机PIC16F87的大功率智能充电机设计孙秀婷;崔猛;卢智嘉【期刊名称】《石家庄学院学报》【年(卷),期】2013(15)6【摘要】利用马斯三定律作为理论基础,设计了一款以大功率开关电源作为充电电源,以单片机为控制核心的多功能通用型智能充电机。
提出了一种三段式脉冲快速充电的新方法,该方法不仅能显著提高充电速度,还能有效实现去极化。
实际使用表明该充电机充电效率高,能有效延长电池使用寿命。
%In this paper,a universal intelligent charger is achieved by using high power SPMS as charger supply based on the theory of Mas’s law and by microcontroller as control central. This paper presents a 3-sectional pulse charging method,which not only speeds up the charging process significantly but also achieves depolarization effectively. The practical application of this charger has proved high efficiency and the ability to prolong the service life of battery.【总页数】4页(P18-21)【作者】孙秀婷;崔猛;卢智嘉【作者单位】石家庄铁道大学四方学院,河北石家庄 051132;石家庄赛米欧机械有限公司,河北石家庄 050000;石家庄学院物理与电气信息工程学院,河北石家庄 050035【正文语种】中文【中图分类】TM910.6【相关文献】1.基于ATmega16单片机的智能快速充电机设计与研究 [J], 党武松;范寒柏;胡杨2.基于ATmega88单片机的智能充电机设计与实现 [J], 郭鑫;袁海文;黄进安3.基于P89LPC936单片机的锂离子电池组智能充电机设计 [J], 高安同;王文兵;张金;高望4.基于MSP430F149单片机的智能快速充电机的设计 [J], 刘皓;李英顺5.基于PIC单片机的锂电池智能充电机设计 [J], 张锦升;刘佳俊;吕健;梅俊锋因版权原因,仅展示原文概要,查看原文内容请购买。
基于单片机PIC16F877A和计量芯片ATT7022A的三相多功能复费率电能表的设计

基于单片机PIC16F877A和计量芯片ATT7022A的三相多
功能复费率电能表的设计
陈金辉;韩媛媛;武文平
【期刊名称】《电力系统保护与控制》
【年(卷),期】2010(038)002
【摘要】三相复费率电能表以microchip公司PIC16F877A单片机作为核心控制芯片,以珠海炬力的ATT7022A作为计量芯片,实现了复费率计量、电能管理、事件记录、自动抄表等功能,从芯片的主要功能、主要硬件电路的组成、主要模块的作用以及电能表的软件系统等三方面给出了详细论述.
【总页数】3页(P98-100)
【作者】陈金辉;韩媛媛;武文平
【作者单位】华北保定电力职业技术学院电气工程系,河北,保定,071051;河北电力自动化研究所,河北,保定,071051;华北保定电力职业技术学院电气工程系,河北,保定,071051
【正文语种】中文
【中图分类】TM73
【相关文献】
1.计量芯片BL6522在三相多功能电能表中的应用 [J], 詹迪霞;
2.计量芯片ADE7758在三相多功能网络电能表中的应用 [J], 陈志忠;徐月华
3.基于ATT7022A的三相IC卡预付费电能表设计 [J], 罗涛;李啸骢;廖丽莹;孔令怡;
胡文霞
4.基于MSP430单片机的多功能复费率三相电能表 [J], 赵宇
5.基于ATT7022A的三相三线多功能电能表 [J], 龙健; 徐岩
因版权原因,仅展示原文概要,查看原文内容请购买。
单片机硬件、软件及其应用讲座(3)第三讲PIC168F873硬件系统(上)

单片机硬件、软件及其应用讲座(3)第三讲PIC168F873硬件
系统(上)
李学海
【期刊名称】《电子世界》
【年(卷),期】2000(000)003
【摘要】@@ PIC16F873型单片机是PIC中级单片机中很有特色的一款,其指令字节为14比特.它具有PIC系列单片机的全部优点,而且片内还带有128×8的EERROM(也叫E2PROM)数据存储器,其程序存储器也与众不同,采用快闪存储器.快闪存储器可以实现在电路板上快速擦除和写入,最适合于制作仿真板.借助于专为PIC16F873制作的仿真板,读者在学习程序编写和调试的过程中,可以方便地烧写程序和修改程序.读者在掌握了PIC16F873之后,如果想进一步学习PIC系列其它型号的单片机,将会收到触类旁通的功效.
【总页数】2页(P28-29)
【作者】李学海
【作者单位】
【正文语种】中文
【相关文献】
1.单片机硬件、软件及其应用讲座(14)第八讲输入/输出端口(上) [J], 李学海
2.单片机硬件、软件及其应用讲座(16)第九讲定时器/计数器(上) [J], 李学海
3.单片机硬件、软件及其应用讲座(4)第三讲 PIC16F873硬件系统(下) [J], 李学海
4.单片机硬件、软件及其应用讲座(10)第六讲软件集成开发环境MPLAB(上) [J], 李学海;王国联
5.单片机硬件、软件及其应用讲座(12) 第七讲 MPLAB-ICD在线调试工具套件及其应用(上) [J], 李学海;张秀芳;王国联;张先迅
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
继 电 器/ / / / / / / / / / / / LMNJO
P98+ ))/ Q9+ % 2=>+ $% ,*..-
()
基于 !"#$%&’() 单片机的动态电力补偿控制系统
来清民$ ,高 霞*
( $+ 河南教育学院物理系, 河南 郑州 ,-...) ; / *+ 河南教育学院化学系, 河南 郑州 ,-...) ) 摘要:介绍了一种基于 !"#$%&’() 单片机的动态电力补偿控制系统, 该系统通过模拟输入电路对相电压、 相 电流进行采样, 利用均方根公式计算相电压的有效值、 相电流的有效值和功率因数, 然后用 !"0 算法计算出触 发信号的大小, 再通过晶闸管相控电抗器来实现电网功率因数的动态补偿。还介绍了控制系统硬件结构和软 件的设计方法。实践表明, 该系统运行可靠、 稳定、 补偿响应速度快, 能够实现动态无级的电力补偿。 关键词:功率因数; / 单片机; / 控制; / 动态补偿 中图分类号:12(),/ / / 文献标识码:3/ / / 文章编号:$..)4,’5( ( *..- ) .%4..()4.)
万 方数据 基金项目: 河南省 *.., 年科技攻关项目 ( .,*,**.**, )
图 */ 模拟输入采样电路 &67+ */ H6?I8=G6B7 6BCIG F=?C86B7 :6>:I6G
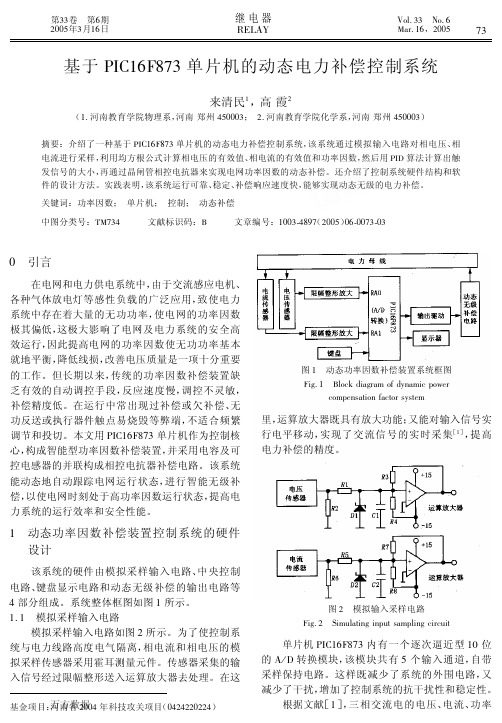
单片机 !"#$%&’() 内有一个逐次逼近型 $. 位 的 J K 0 转换模块, 该模块共有 - 个输入通道, 自带 采样保持电路。这样既减少了系统的外围电路, 又 减少了干扰, 增加了控制系统的抗干扰性和稳定性。 , 三相交流电的电压、 电流、 功率 根据文献 [$]
4?
继电器
因数的测量原理就是在一个周期内采样有限次电压 和电流的数字量, 然后求出它们的方均根值, 从而得 到电压和电流的有效值。 !" #$ 中央控制电路、 键盘和显示电路 中央控制 电 路 如 图 % 所 示, 它的核心是美国 &’()*+,’- 公司 生 产 的 ./0!1234% 单 片 机。该 单 片 机内部嵌入有闪存 567+,、 !8 位 9 : ; 转换模块和脉 宽调制 .<&, 并采用哈佛双总线结构和精简指令 =/>0 技术, 提高了数据吞吐率, 使指令执行速度提 高 ? 倍以上。
/ / 该系统的硬件由模拟采样输入电路、 中央控制 电路、 键盘显示电路和动态无级补偿的输出电路等 , 部分组成。系统整体框图如图 $ 所示。 $+ $/ 模拟采样输入电路 模拟采样输入电路如图 * 所示。为了使控制系 统与电力线路高度电气隔离, 相电流和相电压的模 拟采样传感器采用霍耳测量元件。传感器采集的输 入信号经过限幅整形送入运算放大器去处理。在这
H6I J$2%E1$2,[6\ ]$, ( 9& O+M4$*4 803,-.102.,Q02,2 NL>*,.$(2 I24.$.>.0,^+02%_+(> CDBBB< ,?+$2,; " 5& ?+01$4.-M 803,-.102., Q02,2 NL>*,.$(2 I24.$.>.0,^+02%_+(> CDBBB< ,?+$2,) 61-.,$’.: " G+0 LM2,1$* 3()0- *(13024,.$(2 ,2L *(2.-(’ 4M4.01 X,40L (2 OI?9!#@:< 1$*-(*(2.-(’’0- $4 $2.-(L>*0L& G+0 4M4.01 4,1E 3’04 3+,40 ;(’.,%0 ,2L 3+,40 *>--02. XM 4$1>’,.$2% $23>. *$-*>$.,,2L *(13>.04 .+0 0//0*.$;0 ;,’>04 (/ 3+,40 ;(’.,%0 ,2L *>--02. ,2L 3+,40 3()0- /,*.(- XM >4$2% 4U>,-0 ,;0-,%0 /(-1>’,& G+0 .-$%%0- 4$%2,’ $4 %(. XM .+0 10.+(L (/ OI8,,2L .+0 4M4.01 $4 -0,’$_0L XM .+ME -$4.(- *(2.-(’’0L -0,*.(-& G+0 +,-L),-L ,2L 4(/.),-0 L04$%2 (/ *(2.-(’ 4M4.01 ,-0 ,’4( $2.-(L>*0L& G+0 ,33’$*,.$(2 -04>’. 4+()4 .+,. .+$4 4M4.01 $4 -0’$,X’0,4.,X’0 ,2L /,4. /(- *(13024,.$(2 -043(240,)+$*+ *,2 -0,’$_0 LM2,1$* 4.03’044 3()0- *(13024,.$(2& 万 7+" *),/- : " 方数据 3()0- /,*.(-; " 1$*-(*(2.-(’’0-; " *(2.-(’; " LM2,1$* *(13024,.$(2
(
# ! N # # O +’B # # !"$
)
来清民, 等" 基于 OI?9!#@:<Байду номын сангаас单片机的动态电力补偿控制系统
:D
<" 结论
根据图 9 研制的动态电力补偿装置, 经使用后表 明, 它不仅能自动跟踪负载无功功率变化, 随时无级 进行电力补偿, 无功补偿动态响应速度快 ( !9= 14) ; 而且自动化程度高、 使用寿命长、 便于维修、 安全可 靠。保证了电力设备在优化条件下正常运行的能力。 参考文献:
图 ?$ 动态无级补偿的电路原理图 2’@" ?$ 0’)(H’C *5 GEB7P’( +CA-6A++ (*P-AB+7C’*B
图 %$ 中央控制、 键盘和显示器电路 2’@" %$ 0ABCA) (*BC)*6,DAEF*7)G 7BG G’+-67E (’)(H’C
控制电路根据采集的输入信号, 进行处理后, 并 送片内的 .<& 模块, 输出脉宽调制信号, 经外部滤 波电路变换成可控硅触发信号, 送输出电路。 按键 ><! 和 ><# 、 电阻 !I 和 !!8 构成独立式 按键结构。0.J 采用查询方式判别按键状态。 ><! 是控制系统 “ 启用 : 关闭” 按钮, ><# 是显示内容选 择按钮, 可以选择显示 (*+! 或显示相电压。 !" %$ 动态无级补偿的输出电路 !" %" !$ 动态无级补偿的原理 动态无级补偿的电路主要由固定补偿电容器、 大功率反并联可控硅和一个非饱和电抗器构成, 如 图 ? 所示。其中 K! 和 K# 是抑制高频谐波的电感。 因为流过电抗器的电流受可控硅的移相控制, 故电 容与电感并联支路的电纳可以从容性到感性的范围 内连续调节, 从而可连续调节供给电网的无功功率, 完成供电系统的动态无级补偿功率因数的作用。 , 该电容与电感并联支路的等效 根据文献 [# ] 电纳为: " L M "# N 万方数据
其中:# 为可控硅的触发角。当 # L ! : # 且 ! % "$ Q M ( ! % "$)N "# ] , 电路呈感性, 并联支 "# 时," L N[ 路从电网吸取无功功率; 当 # L ! 时, " L M"# , 电路 呈容性, 并联支路向电网输出无功功率。一般情况 下, 并联支路在容性与感性之间变化, 其电纳与控制 则控制装置 角有关。若电网功率因数 (*+ $ 较低, 以使并联支路 输出信号使可控硅的触发角 # 增大, 向电网提供更多的超前无功, 补偿感性负荷对电网 的无功需求, 提高负载功率因数。因为可控硅的触 所以电力补偿是动态的、 无 发角 # 可以连续变化, 级的。 !" %" #$ 动态无级补偿的输出电路 动态 无 级 补 偿 输 出 电 路 如 图 R 所 示。 因 为 ./0!1234% 单片机的驱动能力很强, 故输出的 .<& 信号直接经 =!% 和 01 滤波后, 送光电耦合器。光 电耦合器采用 &S0%81! , 它的输出端是光敏双向晶 闸管, 并配有过零检测电路, 用于控制晶闸管过零触 发。
5& 5" 6 7 8 转换子程序设计 6 7 8 转换子程序的作用是在一定的时间内多 给出的公 次启动电压和电流转换, 并根据文献 [9] 式计算相电压的有效值、 相电流的有效值、 电功率和 功率因数。6 7 8 转换子程序流程图如图 : 所示。
!"#$%&’ ()*+, ’)%(+#-$.&)# $#/ ’)#.,)0 -"-.+% 1$-+/ )# 2349! 5@:< %&’,)’)#.,)00+,
图 !" 主程序流程图 #$%& !" #’() *+,-. (/ .+0 1,$2 3-(*044 [9] " 马涛, 来清民, 等& 数据采集芯片 68>?@95 在电力监控 系统中的应用 [ A] & 继电器, 5BBC , <5 ( 9D ) : :!E::& F6 G,(,H6I J$2%E1$2,0. ,’& 633’$*,.$(2 (/ 68>?@95 $2 .+0 K>30-;$404 ,2L ?(2.-(’ KM4.01 (/ .+0 N’0*.-$* O()0[ A] & P0’,M, 5BBC , <5 ( 9D ) : :!E::& [5] " 陈荣& 动态功率因数补偿 [ A] & 江苏电机工程, 5BB< , (9) : CDE C:& ?QNR P(2%& ?(13024,.$(2 (/ .+0 8M2,1$* O()0- #,*.([ A] & A$,2%4> N’0*.-*$,’ N2%$200-$2%, 5BB< , (9) : CDE C:& [<] " 余永权, 等& 单片机在控制系统中的应用 [ F] & 北京: 电子工业出版社, 5BB<& ST S(2%EU>,2,0. ,’& 633’$*,.$(2 (/ .+0 F$*-(*(2.-(’’0$2 .+0 ?(2.-(’ KM4.01 [ F] & V0$W$2%: O>X’$4+$2% Q(>40 (/ N’0*.-(2$*4 I2L>4.-M, 5BB<& [C] " 何立民& F?K Y D9 系列单片机应用系统设计系统配置 与接口技术 [ F] & 北 京: 北 京 航 空 航 天 大 学 出 版 社, 9==B& QN H$E1$2& G+0 633’$*,.$(2 KM4.01 804$%2 (/ K0-$04 F?KED9 F$*-(*(2.-(’’0[ F] & V0$W$2%:V0$W$2% T2$;0-4$.M (/ 60-(2,>.$*4 ,2L 64.-,2,>.$*4 O-044, 9==B& 收稿日期: " 5BBCEB=E55 ; " " 修回日期: " 5BBCE99E9@ 作者简介: " 来清民 ( 9=!B Y ) ,男, 副教授, 从事电力自动化教学与 研究;NE1,$’:’U19999Z 4$2,& *(1 高" 霞 ( 9=!5 Y ) ,女, 副教授, 主要研究方向为应用分 图 :" 6 7 8 转换程序流程图 #$%& :" #’() *+,-. (/ 6 7 8 *(2;0-.$2% 3-(*044 析化学, 长期从事应用分析化学的研究和教学。