09-2最速下降法
专题09-2 力 运动和力 第2节 二力平衡 摩擦力(解析版-2023年中考物理重难点精讲讲练

第九课力运动和力第2节二力平衡摩擦力基础知识过关一、二力平衡1.平衡状态:物体受到几个力的作用时,如果保持静止或匀速直线运动状态,我们就说这几个力相互平衡,使物体处于平衡状态。
2.二力平衡的条件:作用在同一物体上,大小相等,方向相反,并且作用在同一条直线上。
3.平衡力与相互作用力1.滑动摩擦力(1)定义:两个相互接触的物体,当它们相对滑动时,在接触面上会产生一种阻碍相对运动的力,这种力叫滑动摩擦力。
(2)方向:与物体的相对运动方向。
(3)影响因素:①接触面的粗糙程度:压力一定时,接触面越粗糙,滑动摩擦力越大;②压力的大小:接触面粗糙程度一定时,压力越大,滑动摩擦力越大。
2.增大或减小摩擦力的方法(1)增大摩擦力:增大压力、增大接触面的粗糙程度、变滚动为滑动(2)减小摩擦力:减小压力、减小接触面的粗糙程度、变滑动为滚动、使接触面分离高频考点过关考点一:二力平衡与相互作用力1.(2022•巴中)一本书放在水平桌面上,书上放一支钢笔,都保持静止,下列说法正确的是()A.钢笔受到的重力和书对钢笔的支持力是一对平衡力B.钢笔对书的压力和书对钢笔的支持力是一对平衡力C.书对桌面的压力和桌面对书的支持力是一对平衡力D.书受到的重力和桌面对书的支持力是一对平衡力【答案】A【解答】解:A、钢笔受到的重力和书对钢笔的支持力,这两个力符合二力平衡条件,是一对平衡力,故A正确;B、钢笔对书的压力和书对钢笔的支持力,这两个力没有作用在同一个物体上,不是一对平衡力,故B错误;C、书对桌面的压力和桌面对书的支持力,这两个力没用作用在同一物体上,它们不是一对平衡力,故C错误;D、桌面对书的支持力的大小等于书与钢笔重力的和,要大于书的重力,所以书受到的重力和桌面对书的支持力不是一对平衡力,故D错误。
故选:A。
2.(2022•梧州)小玲在做家务时,用平行于水平地面的力推沙发,但没有推动。
下列说法正确的是()A.人对沙发的推力小于地面对沙发的摩擦力B.人对沙发的推力与沙发对人的作用力是一对平衡力C.沙发受到的重力与地面对沙发的支持力是一对平衡力D.沙发对地面的压力与地面对人的支持力是一对相互作用力【答案】C【解答】解:A、用平行于水平地面的力推沙发,但沙发没有被推动,沙发处于静止状态,受到的推力和静摩擦力是一对平衡力,大小相等,故A错误;B、人对沙发的推力和沙发对人的推力,是两个物体之间的相互作用力,不是平衡力,故B错误;C、沙发受到的重力与地面对沙发的支持力是作用在同一个物体上的两个力,并且大小相等,方向相反,作用在一条直线上,是一对平衡力,故C正确;D、沙发对地面的压力与地面对人的支持力涉及到三个物体且这两个力大小不相等,所以不是一对相互作用力,故D错误。
09-2链球菌属

(3)P抗原或称核蛋白抗原:无特异性。各种链球菌均相同,并与葡萄球菌有交叉。
5抵抗力一般链球菌均可在60℃被杀死,对常用消毒剂敏感。在干燥尘埃中生存数月。乙型链球菌对青霉素、红霉素、四环素、杆菌肽和磺胺药都很敏感-
(四)微生物学检查法
1.标本根据不同疾病采取相应标本。例如创伤感染的脓汁,咽喉、鼻腔等病灶的棉拭,败血症的血液等。风湿热患者可取血作抗链球菌溶素0的抗体测定。
2直接涂片镜检脓汁可直接涂片进行革兰染色,镜检发现有典型的链状排列球菌时,可做出初步诊断。
3.分离培养与鉴定脓汁或棉拭直接接种在血琼脂平板,37℃孵育24小时后,如有B溶血菌落,应与葡萄球菌区别;若有a溶血菌落,要和肺炎链球菌鉴别。血液标本应先增菌后.再接种血琼脂平板。在心内膜炎病例,因甲型溶血性链球菌生长缓慢,孵育时间至少延长至3周才能判定结果。
链球菌的分类常用下列三种原则。
1溶血现象分类链球菌在血琼脂平板培养基上生长繁殖后,按产生溶血与否及其溶血现象分为3类。
(】)甲型溶血性链球菌(a h…lyt…trept……s):菌落周围有l~2mm宽的草绿色溶血环.称甲型溶血或Ⅱ溶血,因而这类细菌被称为草绿色链球菌(vlr Ld…s订ept。…c-)。“一溶血环中的红细胞并未完全溶解,这类链球菌多为机会致病菌。
3)链道酶(str。ptod…se,sD):亦称链球菌DNA酶(str。ptococcal d㈣xyr bo…cle…),主要由A、c、G群链球菌产生。能降解脓液中具有高度黏稠性的DNA,使脓液稀薄?促进病菌扩散。由于sD和:9K能致敏T细胞,故常进行皮肤试验.通过迟发型超敏反应原理测定受试者的细胞免疫功能,这项试验称为SK,"SD皮试。此外,现已将SK、sD制成酶制剂,临床上用于液化脓性渗出液。
09-32捣固车标准作业流程解析

09-32型捣固车作业流程及标准1 目的规范各号位操作手作业程序,保证作业质量、作业效率和人身、设备安全。
2 适用范围适用于线路维修捣固施工中的09-32型捣固车作业。
3 引用标准3.1 《铁路线路修理规则》铁运[2006]146号。
3.2 《铁路工务安全规则》铁运[2006]177号。
3.3 《大型养路机械使用管理规则》铁运[2006]227号。
4 作业程序4.1 操作号位分布图:三号位五号位四号位作业方向4.2 一号位作业程序:4.2.1 运行前的准备工作1) 撤除捣固车后转向架防溜铁鞋。
2) 检查后驾驶室B5箱面板上所有仪表、报警指示灯显示是否正确,不正确时通知车长进行检查处理。
3) 检查后驾驶室B2箱面板上所有开关、按钮、电位器等是否在作业前的正确位置,不正确则要调整好。
4)协助车长检查随车所带的安全防护用品是否齐全完好。
4.2.2 放车1)机械车到达作业地点后,停车后施加0.15Mpa至0.36Mpa 的小闸制动压力,关闭ZF变速箱钥匙,将档位选择器退至空档。
2)降低发动机转速至怠速,按下停机按钮使发动机停机;停机后点动发动机与二号位配合结合液压泵,直至三个作业泵结合后,重新启动发动机,提高发动机转速至1600r/min。
3)打开作业主电源开关,接通轴支撑四通阀,气动作业系统塞门。
4)按下列顺序顺时针关闭液压系统截止阀:①作业系统压力控制阀;②作业系统蓄能器卸荷阀;③高压系统压力控制阀;④高压系统蓄能器卸荷阀;⑤中间捣镐张开压力控制阀。
5)按住安全系统起动开关直至绿灯亮后松手。
6)选择放车位后,确认B、C点测量小车已解开安全绳,放B、C点小车(按提升-解锁-下降程序)。
7)提升抄平小车,解锁,放下抄平小车。
8)将左右起拨道装置提升按钮按下,确认提升后将其气动解锁阀旋至右位;按下左侧起拨道装置提起并保持按钮( 指示灯亮),按下右侧起拨道装置下降按钮,同时旋转手动拨道开关进行必要的横向位置调整,使右侧拨道轮与右侧钢轨对中,当夹钳未能正确落到钢轨上时,必须重复上述步骤;按下右侧起拨道装置提起并保持按钮(指示灯亮),按下左侧起拨道装置下降按钮,同时旋转手动拨道开关进行必要的横向位置调整,使左侧拨道轮与左侧钢轨对中,当夹钳未能正确落到钢轨上时,必须重复上述步骤;当夹钳正确落到钢轨上时,同时按下左右起拨道装置下降按钮。
第09章基本交通分配模型

计算网络中每个出发地O到目的地D的最短路线;
将该OD交通量全部分配最短路线上;
每分配完一对OD后进行流量迭加,直到最后一对OD 分配完毕。
❖ 0-1分配法的特点 计算简单; 是其它交通分配的基础; 出行量分布不均匀,全部集中在最短路上; 未考虑路段上的容量限制,有时分配到的路段交通量大 于道路的通行能力; 有时某些路段上分配到的交通量为0,与实际情况不符; 随着交通量的增加,未考虑到行程时间的改变。
最短路分配(0-1 分配) 多路径分配
有迭代分配方法
容量限制-最短路分配 容量限制-多路径分配
9.3 非均衡交通分配模型 9.3.1 最短路交通分配法(all or nothing traffic assignment
model)
❖ 分配原理:每一OD对对应的OD量全部分配在连接该OD对 的最短路线上,其它道路上分配不到交通量。
普遍取 1 n 。
分配算例:
试用二次加权平均分配法(MSA方法)求解下面的固定需 求交通分配问题(迭代2次)。
t1
1
2
t2
t1 20 0.01x1 t2 16 0.1x2 q12 100
9.4 用户优化均衡交通分配模型(User Equilibrium Model) UE(用户均衡)的概念最早由Wardrop于1952年提出。 User Equilibrium的基本假设有:
流量{yan} 。
Step3:计算各路段的当前交通量:
xn1 a
xan
( yan
xan )
,
0
1,
A
。
Step4:如果
xn1 a
与
xan
相差不大,则停止计算,
xn1 a
成都理工大学电机学实验报告

电机学实验报告学院:核技术及其自动化工程学院专业:电气工程及其自动化指导教师:***姓名:学号:实验一异步电机的M-S曲线测绘一.实验目的用本电机教学实验台的测功机转速闭环功能测绘各种异步电机的转矩~转差曲线,并加以比较。
二.预习要点1.复习电机M-S特性曲线。
2.M-S特性的测试方法。
三.实验项目1.鼠笼式异步电机的M-S曲线测绘测。
2.绕线式异步电动机的M-S曲线测绘。
>T m,(n=0)当负载功率转矩当S≥S m过读取不同转速下的转矩,可描绘出不同电机的M-S曲线。
四.实验设备1.MEL 系列电机系统教学实验台主控制屏。
2.电机导轨及测功机、转矩转速测量(MEL-13、MEL-14)。
3.电机起动箱(MEL-09)。
4.三相鼠笼式异步电动机M04。
5.三相绕线式异步电动机M09。
五.实验方法1被试电动机M04法。
G 功机,与按图实验步骤:(1)按下绿色“闭合”按钮开关,调节交流电源输出调节旋钮,使电压输出为220V ,起动交流电机。
观察电机的旋转方向,是之符合要求。
(2)逆时针缓慢调节“转速设定”电位器经过一段时间的延时后,M04电机的负载将随之增加,其转速下降,继续调节该电位器旋钮电机由空载逐渐下降到200转/分左右(注意:转速低于200转/分时,有可能造成电机转速不稳定。
)(3)在空载转速至200转/分范围内,测取8-9组数据,其中在最大转矩附近多测几点,填入表5-9。
(4)当电机转速下降到200转/分时,顺时针回调“转速设定”旋钮,转速开始上升,直到升到空载转速为止,在这范围内,读出8-9组异步电机的转矩T,转速n,填入表5-10。
2.绕线式异步电动机的M-S曲线测绘(2)绕线电机的转子调节电阻调到2Ω(断开电源,用万用表测量,三相需对称),重复以上步骤,记录相关数据。
(3)绕线电机的转子调节电阻调到5Ω(断开电源,用万用表测量,三相需对称),重复以上步骤,记录相关数据。
七.实验分析通过这次实验可以看到,表5-9中可知在在空载转速至200转/分范围内转矩,转速都没有怎么变化;由表5-10可知转速开始上升到空载转速时,转速升高转矩降低;由表5-11,5-10对比可知,当外接电阻不变时,电压变小,对应的转矩转速都要减小;由表5-12,5-13对比可知当电压不变时,外接电阻增大对应的转矩,转速反而减小。
金属学与热处理课件-09-钢的热处理ppt.ppt

——专指溶入 A 中的Me,或者说成 分均匀化的。
0.5C
T
0.9C+0.5Mn 0.9C+1.2Mn
0.9+2.8Mn
Mn%↑ ,C曲线右移
τ
0.5C+2%Cr
0.5C+4%Cr
0.5C+8%Cr
τ
Cr%↑ ,C曲线右移
非碳化物形成元素:只改变C曲线位置 Co,Al,Ni,Cu,Si
T
Si
Co,Al Co, Al 外所有合金元素
例:球化退火,要求获得粒状珠光体 → 要求A 中 C 不均匀 → 控制第三、四阶段
三 奥氏体晶粒度及影响因素
1. 奥氏体晶粒度
奥氏体晶粒度表示奥氏体晶粒大小,工业上一般分为8级。 1 - 4 粗; 5 - 8 细,
8级以上 极细;
计算式: n = 2 N-1
N:晶粒度级别
n:1平方英寸视场中所包含的平均晶粒数(100X)。
1 高温转变产物 ——Fe、C均扩散 亚共析钢: F+P; 共析钢: P; 过共析钢: P+Fe3C
┗ 珠光体(Pearlite)类型
化学成分与晶格类型的转变均靠扩散实现 ——扩散类型
2 中温转变产物
——Fe不扩散,C部分扩散 α(C过饱和的)+Fe3C的机械混合物 ┗ 贝氏体类型( B) 化学成分的变化靠扩散实现 晶格类型的转变非扩散性 ——半扩散性
** 实际中由于CCT曲线测量难,可用TTT曲线代替CCT曲线作定性 分析,判断获得M的难易程度。
** 连续冷却的VC值是等温冷却C曲线中与鼻点相切的VC的1.5倍,故 可用等温冷却C曲线中VC代替或估算.
钢的珠光体转变
1 珠光体的组织形态
第06讲 SA法

(k)称为收敛因子.
1 SA原理--Robbins-Monro算法(2/3)
可以证明,若收敛因子(k)满足下列条件
ρ(k ) 0 k Lim ρ(k ) 0 k ρ( k ) k 1 ρ 2 (k ) k 1
上述Robbins-Monro算法是求解随机方程(9)的根. 后来 ,Kiefer 和 Wolfowitz 将它应用到求解回归函数 h(x) 的 极值,提出求解随机函数数值优化的Kiefer-Wolfowitz算法. Kiefer-Wolfowitz算法的思想为: 如果h(x)存在极值,那么在极值处的x应使 dh(x)/dx=0. 根据Robbins-Monro算法,Kiefer和Wolfowitz给出了如 下求回归函数h(x)的极值的迭代算法 x(k+1)=x(k)-(k)dy/dx|x(k) (12)
(18) (19)
不难证明,只要被辨识系统的观测数据向量(k)不以指数 规律衰减,SA算法(18)~(19)的收敛因子(k)=1/r(k-1)必满 足SA法的收敛条件(11).
2 SA参数估计法(6/5)
ˆ (k ) θ ˆ (k -1) φ(k -1) [ y(k ) - φ τ (k -1)θ ˆ (k -1)] θ r (k 1) r (k - 1) r (k - 2) φ τ (k - 1)φ(k - 1), r (-1) 0 (18) (19)
第六讲 SA法(1/3)
第六讲 随机逼近法
前面讨论的辨识算法均属于LS类的估计算法,
其优点是 收敛速度快,
精度高等,
但其计算量大且占用计算机系统的内存较多等严重影响 了其在实时辨识和在自适应系统中的运用.
1.6有理数的乘方(第3课时科学记数法)(同步课件)-七年级数学上册(沪科版2024) (1)
)
5
5
A. 0.186×10
B. 1.86×10
C. 18.6×104
D. 186×103
2. [2023·泰安]2023年1月17日,国家航天局公布了我国嫦娥
五号月球样品的科研成果,科学家们通过对月球样品的研
究,精确测定了月球的年龄是20.3亿年,数据20.3亿年用
科学记数法表示为( B
8
)
9
A. 2.03×10 年
3.用科学记数法表示下列各数:
(1)304 000;
(2)8 700 000;
(3)500 900 000;
(4)63 000 000.
解:(1)3.04×105 .
(3)5.009×108 .
(2)8.7×106 .
(4)6.3×107 .
4.下列用科学记数法表示的数,原来各是什么数?
(1)9.6×105;
贫到解决,完成了消除绝对贫困的艰巨任务,创造了又一个彪炳史册的人
迹!请用科学记数法表示9899万和12.8万
解:9899万=98990000=9.899 ×
12.8万=128000=1.28×
6.用科学记数法表示下列各数:
(1)地球的半径约为6 400 000 m;
(2)青藏铁路从青海西宁到西藏拉萨的铁路全长约1 955 000 m;
4. 2024年1月11日安徽省文化和旅游局长会议在合肥召开,会
议提出今年要大力推进文化和旅游深度融合发展,全面实施
高品质旅游强省“六大工程”,力争旅游总收入突破1万亿
12
1×10
元,1万亿用科学记数法表示为
.
知识点2 还原用科学记数法表示的数
09线性规划
线性规划问题21. 某工厂生产A、B两种产品,均需经过两道工序,每生产1吨A产品需要经过第一道工序加工2小时,第二道工序加工3小时;每生产1吨B产品需要经过第一道工序加工3小时,第二道工序加工4小时。
可供利用的第一道工序工时为15小时,第二道工序工时为25小时。
生产产品B的同时可产出副产品C,每生产1吨产品B,可同时得到2吨产品C而不需要外加任何费用。
副产品C一部分可以盈利,但剩下的只能报废,报废需要一定的费用。
各项费用的情况为:出售产品A每吨能盈利400元;出售产品B每吨能盈利800元;每销售1吨副产品C能盈利300元;当剩余的产品C报废时,每吨损失费用200元。
经市场预测,在计划期内产品C的最大销量为5吨。
如何安排A、B两种产品的产量可使工厂总的盈利为最大?解:设A 、B 产品的产量分别为21,x x ,C 产品的销售量和报废量分别为43,x x ,金额单位为百元,则 43212384max x x x x z -++=4,3,2,1,05254315320232121432=≥≤≤+≤+=--i x x x x x x x x x i可解得:50,)0,5,5.2,75.3(*==z x T 2.某公司生产甲、乙、丙三种产品,都需要经过铸造、机加工和装配三个车间。
甲、乙两种产品的铸造既可以外包协作,也可以自行生产,但丙产品必须本厂铸造才能保证质量。
有关情况的数据如下表。
问:公司为了获得最大利润,甲、乙、丙三种产品各生产多少件?甲、乙两种产品由本公司铸造和由外包协作各应多少件?(时间单位:小时,金额单位:元)解:设 321,x x x , 分别为三道工序都由本公司加工的甲、乙、丙三种产品的件数,54,x x 分别为由外协铸造再由本公司机加工和装配的甲、乙两种产品的件数,考虑到获利情况,有5432191371015max x x x x x z ++++=5,4,3,2,1,010000232231200046846800071055432154321321=≥≤++++≤++++≤++i x x x x x x x x x x x x x x i可解得:29400,)600,0,0,0,1600(*==z x T 3.某公司计划要用A 、B 、C 三种原料混合调制出3种不同规格的产品甲、乙、丙,产品的规格要求、单位价格、原料的供应量、原料的单位价格等数据如下表。
2021-2022学年物理八年级上册期末高频考点专题突破(人教版)专题09 温度(解析版)
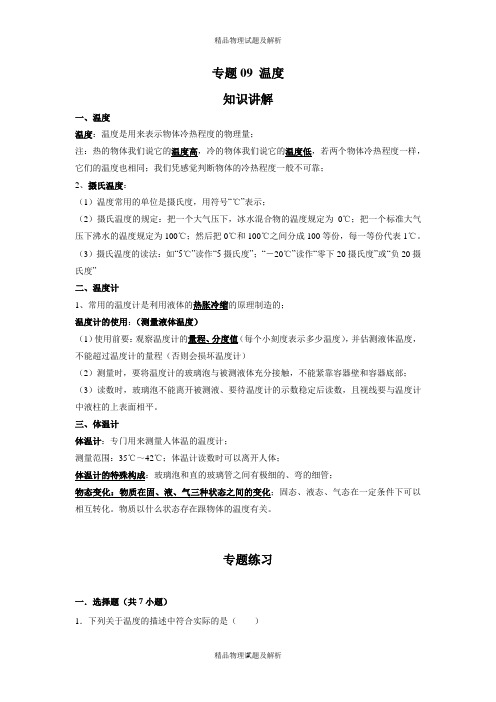
专题09 温度知识讲解一、温度温度:温度是用来表示物体冷热程度的物理量;注:热的物体我们说它的温度高,冷的物体我们说它的温度低,若两个物体冷热程度一样,它们的温度也相同;我们凭感觉判断物体的冷热程度一般不可靠;2、摄氏温度:(1)温度常用的单位是摄氏度,用符号“℃”表示;(2)摄氏温度的规定:把一个大气压下,冰水混合物的温度规定为0℃;把一个标准大气压下沸水的温度规定为100℃;然后把0℃和100℃之间分成100等份,每一等份代表1℃。
(3)摄氏温度的读法:如“5℃”读作“5摄氏度”;“-20℃”读作“零下20摄氏度”或“负20摄氏度”二、温度计1、常用的温度计是利用液体的热胀冷缩的原理制造的;温度计的使用:(测量液体温度)(1)使用前要:观察温度计的量程、分度值(每个小刻度表示多少温度),并估测液体温度,不能超过温度计的量程(否则会损坏温度计)(2)测量时,要将温度计的玻璃泡与被测液体充分接触,不能紧靠容器壁和容器底部;(3)读数时,玻璃泡不能离开被测液、要待温度计的示数稳定后读数,且视线要与温度计中液柱的上表面相平。
三、体温计体温计:专门用来测量人体温的温度计;测量范围:35℃~42℃;体温计读数时可以离开人体;体温计的特殊构成:玻璃泡和直的玻璃管之间有极细的、弯的细管;物态变化:物质在固、液、气三种状态之间的变化;固态、液态、气态在一定条件下可以相互转化。
物质以什么状态存在跟物体的温度有关。
专题练习一.选择题(共7小题)1.下列关于温度的描述中符合实际的是()A.冰箱冷冻室的温度约为10℃B.发高烧时人体温度可能达到40℃C.饺子煮熟即将出锅时温度为50℃D.加冰的橙汁饮料温度为﹣20℃【分析】根据我们对于生活中常见物体温度的了解来作答,这就要求我们在平时的生活中多观察、多思考。
【解答】解:A、冰箱冷冻室的温度约为﹣10℃左右,故A不符合实际;B、正常人的体温是37℃左右,高烧病人的体温可以达到40℃,故B符合实际;C、饺子煮熟即将出锅的温度约为100℃左右,故C不符合实际;D、加冰的橙汁饮料的温度应该在0℃或0℃以上,故D不符合实际。
部编数学九年级上册专题09二次函数的实际应用—拱桥问题(解析版)含答案

2022-2023学年人教版数学九年级上册压轴题专题精选汇编专题09 二次函数的实际应用—拱桥问题考试时间:120分钟 试卷满分:100分一.选择题(共10小题,满分20分,每小题2分)1.(2分)(2021九上·虹口期末)如图所示,一座抛物线形的拱桥在正常水位时,水而AB 宽为20米,拱桥的最高点O 到水面AB 的距离为4米.如果此时水位上升3米就达到警戒水位CD ,那么CD 宽为( )A .B .10米C .米D .12米【答案】B 【解析】【解答】以O 点为坐标原点,AB 的垂直平分线为y 轴,过O 点作y 轴的垂线,建立直角坐标系,设抛物线的解析式为y=ax 2,∵O 点到水面AB 的距离为4米,∴A、B 点的纵坐标为-4,∵水面AB 宽为20米,∴A(-10,-4),B (10,-4),将A 代入y=ax 2,-4=100a ,∴125a =-,∴2125y x =-,∵水位上升3米就达到警戒水位CD ,∴C 点的纵坐标为-1,∴21125x -=-∴x=±5,∴CD=10,故答案为:B .【思路引导】先建立平面直角坐标系,设抛物线的解析式为y=ax 2,再求出解析式,最后利用二次函数的性质求解即可。
2.(2分)(2021九上·安阳期中)有一拱桥洞呈抛物线形,这个桥洞的最大高度是16m ,跨度为40m ,现把它的示意图(如图)放在坐标系中,则抛物线的解析式为( )A .y =125 x 2+ 58x B .y =-125 x 2+ 85 x C .y =- 58 x 2- 125 x D .y =- 125 x 2+ 85 x +16【答案】B 【解析】【解答】解:由图可知,该抛物线开口向下,对称轴为x =20,最高点坐标为(20,16),且经过原点,由此可设该抛物线解析式为 ()22016y a x =-+ ,将原点坐标代入可得 400160a += ,解得: 125a =- ,故该抛物线解析式为 ()22118201625255y x x x =--+=-+.故答案为:B.【思路引导】由题意可设抛物线解析式为y=a(x-20)2+16,将(0,0)代入可得a的值,据此可得抛物线的解析式.3.(2分)(2021九上·诸暨月考)如图是抛物线形拱桥,当拱顶离水面2m时,水面宽4m,则水面下降1m时,水面宽度增加( )A.1m B.2mC.(﹣4)m D.(﹣2)m【答案】C【解析】【解答】解:如图,建立直角坐标系,设y=a(x-2)(x+2),∴2=a(0-2)(0+2),∴a=-12,∴y=-12(x-2)(x+2),当水面下降1米时,y=-1,∴-1=-12(x-2)(x+2),解得,∴水平宽度增加:(-4)m.故答案为:C.【思路引导】根据题意建立直角坐标系,结合数据求出二次函数解析式,再把y=-1代入抛物线解析式,则可求出此时的水面宽度,即可得出答案.4.(2分)(2020九上·郁南期末)如图所示,赵州桥的桥拱用抛物线的部分表示,其函数的关系式为 2125y x =- ,当水面宽度 AB 为20m 时,此时水面与桥拱顶的高度 DO 是( )A .2mB .4mC .10mD .16m【答案】B 【解析】【解答】解:根据题意得B 的横坐标为10,把x=10代入 2125y x =-,得y=-4,∴OD=4m,故答案为:B .【思路引导】将x=10代入函数解析式求出y=-4,再求解即可。
富士变频器使用说明
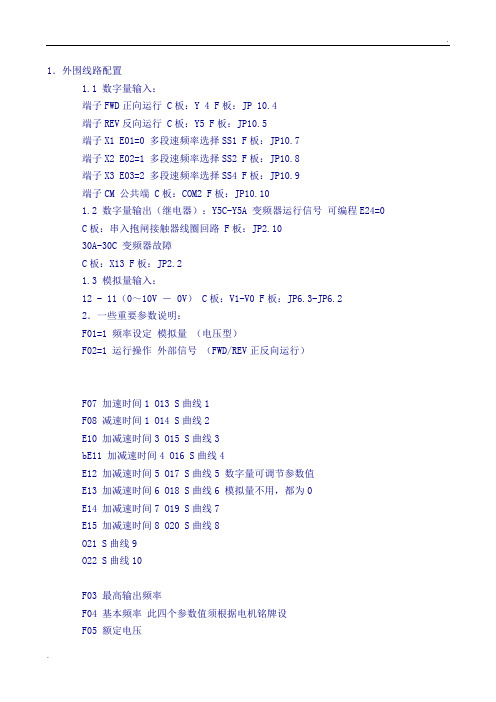
1.外围线路配置1.1 数字量输入:端子FWD正向运行 C板:Y 4 F板:JP 10.4端子REV反向运行 C板:Y5 F板:JP10.5端子X1 E01=0 多段速频率选择SS1 F板:JP10.7端子X2 E02=1 多段速频率选择SS2 F板:JP10.8端子X3 E03=2 多段速频率选择SS4 F板:JP10.9端子CM 公共端 C板:COM2 F板:JP10.101.2 数字量输出(继电器):Y5C-Y5A 变频器运行信号可编程E24=0C板:串入抱闸接触器线圈回路 F板:JP2.1030A-30C 变频器故障C板:X13 F板:JP2.21.3 模拟量输入:12 - 11(0~10V - 0V) C板:V1-V0 F板:JP6.3-JP6.22.一些重要参数说明:F01=1 频率设定模拟量(电压型)F02=1 运行操作外部信号(FWD/REV正反向运行)F07 加速时间1 O13 S曲线1F08 减速时间1 O14 S曲线2E10 加减速时间3 O15 S曲线3bE11 加减速时间4 O16 S曲线4E12 加减速时间5 O17 S曲线5 数字量可调节参数值E13 加减速时间6 O18 S曲线6 模拟量不用,都为0E14 加减速时间7 O19 S曲线7E15 加减速时间8 O20 S曲线8O21 S曲线9O22 S曲线10F03 最高输出频率F04 基本频率此四个参数值须根据电机铭牌设F05 额定电压F06 最高输出电压F17 频率设定增益(模拟量)F18 频率偏置(模拟量)F26 载波频率 15KHz 一般不调,仅当电机动作正常,但声音尖锐异常时可调整(≤15KHz)E33=1 过负载预报按输出电流预报E34: OL预报值额定电流150%**E37 过负载预报额定电流150%**C07 爬行速度C08 检修速度数字量可调节参数值C09 单层速度模拟量不用,都为0C10 双层速度C11 多层速度C33 模拟量输入滤波时间 0.04P01 电机极数 P=120f/N (f-电机额定频率;N-电机额定转速)一般情况,N >1000rpm, P=4极N≤1000rpm, P=6极P02 电机功率此两个参数值须根据电机铭牌设P03 电机额定电流P04 电机空载电流初始值设为p04的40%,自整定后自动生成O01=1 (闭环); 0(开环)O03 编码器脉冲数(分频在PG卡上实现)O04 速度环P常数(高速时)O05 速度环I常数 0.5O06 速度检测滤波常数 0.003O07 速度环P常数切换频率1 5O08 速度环P常数切换频率2 10O09 速度环P常数(低速时)H03 数据初始化(一般不用)3. 特殊参数调试说明3.1 H03 数据初始化(一般不用)这个参数用法可参考第一章“3.1 A1-03=0 初始化”,与之用法类似。
4种人肾细胞癌原位移植裸鼠模型建立方法的比较
《中国癌症杂志》2017年第27卷第3期CHINA ONCOLOGY 2017 Vol.27 No.3177 4种人肾细胞癌原位移植裸鼠模型建立方法的比较赵佩佩1,2,陈晓静2,王巧玲1,2,赵 雪2,赵亚男2,刘培峰2,戴慧莉1,21.上海交通大学医学院附属仁济医院肾脏科,上海200127;2.上海交通大学医学院附属仁济医院中心实验室,上海200127 [摘要] 背景与目的:肾细胞癌是最常见的肾脏恶性肿瘤,起病隐匿,恶性程度高。
研究旨在建立成功率高、稳定的人肾细胞癌原位动物造模方法。
方法:采用人肾细胞癌细胞(786-0、ACHN)进行细胞悬液原位注射法、皮下成瘤后引瘤原代细胞悬液原位注射法、皮下成瘤后引瘤组织块原位移植肾包膜下法及皮下成瘤后引瘤组织块原位移植肾周筋膜内法建立原位移植裸鼠模型,采用PET/CT、H-E染色、免疫组织化学染色及血清生化检测等手段观察成瘤率及肿瘤生长情况,评估4种方法的建模效果。
结果:人肾细胞癌皮下移植瘤裸鼠模型,ACHN组成瘤率(90%)高于786-0组(30%);人肾细胞癌原位移植裸鼠模型,786-0原位注射组、ACHN原位注射组、ACHN皮下移植瘤引瘤后原代细胞原位注射组、ACHN组织块肾包膜下包埋组和ACHN组织块肾周筋膜内包埋组的成瘤率分别为33%、80%、90%、100%和20%,其中以ACHN皮下成瘤后引瘤组织块原位移植肾包膜下法成瘤率最高,影像学及病理组织学检查结果显示符合低分化肾细胞癌。
结论:成功建立4种人肾细胞癌原位移植裸鼠模型,其中以ACHN皮下成瘤后引瘤组织块原位移植肾包膜下法成瘤效果最佳,为肾细胞癌发病机制及靶向治疗的进一步研究提供理想的动物模型。
[关键词] 肾细胞癌;裸鼠;原位移植;PET/CT;ACHN细胞 DOI: 10.19401/ki.1007-3639.2017.03.003 中图分类号:R737.11 文献标志码:A 文章编号:1007-3639(2017)03-0177-09A comparative study of four methods of establishing orthotopic human renal cell carcinoma modelsin nude mice ZHAO Peipei1,2, CHEN Xiaojing2, WANG Qiaoling1,2, ZHAO Xue2, ZHAO Yanan2, LIU Peifeng2, DAI Huili1,2 (1. Department of Nephrology, Renji Hospital, School of Medicine, Shanghai Jiao Tong University, Shanghai 200127, China; 2. Department of Central Laboratory, Renji Hospital, School of Medicine, Shanghai Jiao Tong University, Shanghai 200127, China)Correspondence to: DAI Huili E-mail: dhl_sh@ [Abstract] Background and purpose: Renal cell carcinoma is the most common form of kidney cancer, characterized by lack of early symptoms and high malignancy. This study aimed to establish orthotopic nude mice models of human renal cell carcinoma with high success rate and good repeatability.Methods: The four types of methods which were adopted to establish the orthotopic models of renal cell carcinoma were orthotopic injection of 786-0 and ACHN cell suspensions, orthotopic injection of primary cell suspensions obtained from the subcutaneous tumortissues, renal subcutis orthotopic implantation into renal capsule and surgical subcutis orthotopic implantation into renal fascia. To gain insights into the tumorigenicity and the growth of transplantation tumors, the imageological examination (PET/CT), histological examination (H-E staining, immunohistochemistry staining) and biochemical analysis of blood were carried out. Results: In terms of the subcutaneous transplantation of human renal cell carcinoma models in nude mice, tumorigenic rate of ACHN cells (90%) was higher than that of 786-0 cells (30%). The tumorigenic incidences of 786-0 cell suspensions orthotopic injection, ACHN cell suspensions orthotopic injection, ACHN subcutis cellular suspensions orthotopic injection, ACHN subcutis orthotopic implantation into renal capsule and renal fascia were 33%, 80%, 90%, 100% and 20%, respectively. ACHN subcutis orthotopic implantation into renal capsule was the most基金项目:上海市科学技术委员会科研计划项目(151********)。
09-2-第五章-海流-第一节-海洋潮汐概述(更新)
§5.1 海洋潮汐概述
5.1.4、潮汐理论 3、潮汐动力理论
775年拉普拉斯提出了潮汐动力学理论,用动力学方法研究海
)概念
在引潮力作用下产生潮汐的运动过程,进而揭示与说明海洋潮
的复杂现象。
受力:在潮汐动力理论中,铅直引潮力较重力小很
多,水平引潮力才对海水运动起主要作用,同时还
作用有地转偏向力和摩擦力。
运动过程:海洋潮汐是海水在月球和太阳水平引潮
力作用下产生的一种长周期潮波运动,潮波周期为
2小时左右或24小时左右,波长达数百上千公里。
垂直方向的潮位涨落和水平方向的潮流变化是反映潮波 运动的两个主要特征,其中潮流的涨落带来了潮位的变化。 潮波运动形态有前进潮波、驻潮波、旋转潮波三种运动形 式。前进潮波和驻潮波是一种较理想状态的潮波运动,实际潮波 运动因受到地形、地转偏向力和摩擦力等的影响而往往呈现为旋 转潮波运动形式。
其潮流流速: 式中:c为潮波波速
长海峡中潮汐运动
结论:不受地球自转影响下的长海峡潮波运动表现 为潮流 u 与潮位 同步变化的前进潮波。
§5.1 海洋潮汐概述
前进潮波与完全反射的反射波 ,叠加而产生驻潮波,其潮位:
流速: 潮位和潮流存在π/2的相位差, 不是同步变化。
驻波演示
§5.1 海洋潮汐概述
§5.1 海洋潮汐概述
概念 1. 潮汐基准面 ,海图基准面 2. 潮高 ,高潮高 ,低潮高 ,潮差 影响潮差因素: 地球、月球、太阳三者间的相对 运动位置
§5.1 海洋潮汐概述
潮位高度是相对于潮汐的基准面定义的,所以潮汐基准面又 称为进行潮位测量的起始面,它一般与海图的基准面相同,起 着朝下定深度、朝上定潮高的作用。 潮高从潮汐基准面算起, 高潮面到潮汐基准面的距离 就定义为高潮高,低潮面到 潮汐基准面的距离就定义为 低潮高,相邻的高、低潮位 之差就称为潮差
星点设计效应面法

报告内容
一、引言 二、CCD效应面法基本概念 三、CCD效应面法基本原理 四、CCD效应面法操作环节
一、引言
在药学制剂工艺优化和处方筛选过程中,常需同步考察 多种原因对成果旳影响,并对成果进行优化。当原因水平数 较少时可采用析因设计;较多时需采用试验次数较少旳试验 设计优化法。
国内目前用得比较成熟旳措施为均匀设计和正交试验设 计措施,虽然上述两种措施在试验处理时能够取得较佳点, 基本能够满足一般试验旳要求。但是它们还存在某些问题: 如试验旳精度不够,建立旳数学模型预测性较差,选择旳试 验取值仅仅是接近最佳取值,无法精确找到最佳点,不能灵 敏地考察各原因间旳交互作用等等。
模型旳复有关系数r=0. 9838,先删除最不可信旳b3和b8项,
重新拟合,再根据P值依次删除b6和b7项,再拟合,成果见表4。
四、CCD效应面法操作环节
4.3 多元线性或非线性拟合
实例:采用星点设计效应面法优选远志旳提取工艺。 表 4 简化后二次多项式非线性估计成果
估计值 原则误
t
P
b0
-160. 4345 33. 9894
三、CCD效应面法基本原理
• 宏观上讲,效应面优化法就是经过描绘效应对考察原因旳 效应面,从效应面上选择较佳旳效应区,从而回推出自变 量取值范围即最佳试验条件旳优化法。使用起来直观、以 便、效果很好。
• 简朴地说,效应面优化法就是经过拟合效应变量对考察原 因变量旳效应面,即函数f不可能用数学模型表述,效应 对原因旳真实效应面只是假想旳,但能够用某一数学模型 f ' 近似地模拟函数f,根据该模型能够描绘效应面,从效 应面上选择最优旳效应域,利用f’求得自变量x1, x2,…, xn取值范围即最佳试验条件旳优化法。数学模型f与f ' 旳近 似程度直接关系到效应面旳近似程度与优选条件旳精确度。
09-32捣固车操作手册
D09 – 32 型连续式捣固车操作手册铁道建筑研究所编译昆明机械厂目录布置图............................................................................................................................................. UD00.1154-2 发动机 - 泵 - 液压安装技术概述 ................................................................................................................................................ A1 - A12 图片页码3168B071作业司机室:操作控制............................................................................................................. B1 3168B073发动机控制面板B5 ................................................................................................................... B3 3168B074发动机控制面板B5——“A”部分 ............................................................................................. B4 3168B075发动机控制面板B5——“B”部分 ............................................................................................. B5 3168B072作业司机室(操作控制箱的左手边)....................................................................................... B7 3168B076故障指示——“C”部分 ............................................................................................................... B8 2952B030加热器控制箱B21 ................................................................................................................... B10 3168B098作业司机室(综览)............................................................................................................... B11 3168B001作业司机室 ............................................................................................................................. B12 3168B092中央润滑系统控制箱............................................................................................................... B13 3168B002作业踏板................................................................................................................................. B14 3168B091液压控制面板 ......................................................................................................................... B15 3067B091气动控制面板 ......................................................................................................................... B16 3067B075作业控制面板B2(右侧)——综览........................................................................................ B18 3067B072作业控制面板 ......................................................................................................................... B19 3067B073作业控制面板B2——“B“部分.................................................................................................. B21 3168B008作业控制面板B2——“C”部分............................................................................................... B22 3168B004作业控制面板B19(左侧)——综览...................................................................................... B24 3168B097作业控制面板车B19——“A”部分 ......................................................................................... B25 3067B070作业控制面板B19——“B”部分 ............................................................................................. B26 3133B086作业控制面板车B19——“C”部分 ......................................................................................... B29 3168B010逻辑控制箱——综览............................................................................................................... B30 3168B011程序控制面板B20 ................................................................................................................... B31 3168B095用于模拟控制电路的印刷电路板B10 ...................................................................................... B32 3168B096用于模拟控制电路的印刷电路板 B6 ...................................................................................... B33 3168B012监控部分 B18 ......................................................................................................................... B34 3168B067测量司机室:运行控制........................................................................................................... B35 3168B059前司机室:发动机控制板 ....................................................................................................... B36 3168B060前司机室 B4 ........................................................................................................................... B37 3067B058作业司机室:作业控制面板B4 ............................................................................................... B38 3146B089前司机室:作业控制面板B4,D部分 ..................................................................................... B40 3168B066作业监测B33 .......................................................................................................................... B41 3168B069测量司机室:综览 .................................................................................................................. B43 3050B051加热器控制箱B21 ................................................................................................................... B44 3168B062测量司机室:综览 .................................................................................................................. B45 2970B030激光发射小车 ......................................................................................................................... B46 3168B081机器前端面 ............................................................................................................................. B47 3168B082机器前部左侧 ......................................................................................................................... B48 3168B034机器前部右侧 ......................................................................................................................... B49 3168B035前部通道................................................................................................................................. B50 3168B036柴油油箱................................................................................................................................. B51 3168B037前部通道................................................................................................................................. B52 3168B044发动机隔仓通道...................................................................................................................... B53 3168B039发动机隔仓区 ......................................................................................................................... B54 3067B009机器左侧................................................................................................................................. B55 3168B042变速箱隔仓:液压泵的操作.................................................................................................... B56 3168B043液压油箱:侧视...................................................................................................................... B573168B054捣固小车:左侧顶视............................................................................................................... B58 3168B053捣固小车:右侧顶视............................................................................................................... B59 3168B045捣固小车:顶部左侧............................................................................................................... B60 3067B051捣固小车锁定 ......................................................................................................................... B61 3067B103压力选择阀和安全阀阀块 ....................................................................................................... B62 3067B039机器前部左侧:排碴器........................................................................................................... B63 3168B032捣固小车:右侧纵向控制 ....................................................................................................... B64 3168B085机器左侧................................................................................................................................. B65 3168B099机器右侧................................................................................................................................. B66 3168B009捣固小车:全部顶部侧面 ....................................................................................................... B67 3168B100捣固小车运行安全装置........................................................................................................... B68 3067B049抄平和拨道控制:伺服阀块.................................................................................................... B69 3067B050液压控制:枕端夯拍器........................................................................................................... B70 3168B048液压控制块 ............................................................................................................................. B71 3168B089左侧捣固装置顶部 .................................................................................................................. B72 3067B099右侧捣固装置锁定 .................................................................................................................. B73 3067B045捣固装置................................................................................................................................. B74 3067B044拨道小车................................................................................................................................. B75 3067B100捣固小车驱动及制动............................................................................................................... B76 3168B030拨道小车——右侧 .................................................................................................................. B77 3168B086起道、拨道装置...................................................................................................................... B78 3067B040捣固小车左侧前部 .................................................................................................................. B79 3067B081捣固小车驱动和制动............................................................................................................... B80 3168B028测量小车................................................................................................................................. B81 3168B033机器右前部:排碴器............................................................................................................... B82 3168B015机器后部左侧 ......................................................................................................................... B83 3168B024机器后部右侧 ......................................................................................................................... B84 3168B022材料车:右侧视图 .................................................................................................................. B85 3168B018材料车:左侧视图 .................................................................................................................. B86 3168B023综合材料车 ............................................................................................................................. B87 3168B016后张紧小车 ............................................................................................................................. B88 3168B017材料车左侧后部...................................................................................................................... B89 3168B021材料车右侧后部...................................................................................................................... B90 3168B019记录仪测量小车...................................................................................................................... B91 司机室内部装修…………………………………………………………………………………………………B92 液压系统蓄能器…………………………………………………………………………………………………B93 制动系统:YZ-1型制动机布置………………………………………………………………………………..B94 空气干燥器………………………………………………………………………………………………………B95 应急泵……………………………………………………………………………………………………………B96 1.机器首次准备 ...................................................................................................................................... C1 2.启动发动机.......................................................................................................................................... C3 3.机器的启动和停机 ............................................................................................................................... C4 4.从运行状态转换到作业状态................................................................................................................. C7 5.液压系统(作业系统)...................................................................................................................... C10 6.气动系统............................................................................................................................................ C12 7.作业模式............................................................................................................................................ C13 8.从作业位转换至运行位...................................................................................................................... C30 9.作业中的重要注意事项……………………………………………………………........................................C32驱动系统发动机KHD 柴油机 BF12L513C型, 348 KW( 2300 1/ min)空气压缩机 BS1247发动机安装发动机与辅助装置(液压泵、空气压缩机、发电机等)安装在一个独立框架上,又通过金属-橡胶减震器安装在主车架上。
折线统计图四种讲解技能
讲解一:分析折线统计图的特征(1)从这幅折线统计图中,你得到了什么数学信息?怎么看出来的?小结:从你们的回答中了解到,折线统计图是通过点来表示数的多少。
(2)从折线统计图中,能快速看出哪年到哪年的游客人数增加最快吗?怎么看的?生:09到10年的线段很长。
师:你的意思是线越长,人数增加越多,那线只反映数量的增加吗?所以,线可以反映数量的增减变化。
小结:折线统计图是通过点表示数量的多少,通过线来反映数量的增减变化。
3.变化趋势(1)用手比划一下09到10年的线段,感觉怎么样?(陡)我们可以说当线越陡,这种变化就越快像09到10年这条表示上升的线比较陡,说明它上升的速度比较快,我们就把这种上升趋势表示快速上升。
你了解09到10年的游客人数增加这么多的原因吗?(2)请观察一下这几条线段,它们上升的线陡吗?上升的速度和09到10年相比,怎么样?上升的速度比较慢的变化表示缓慢上升。
(3)这幅图中,每两年之间的人数变化都是上升的吗?哪年到哪年不是?感觉一下,它的线陡吗?下降的速度样?这种变化趋势表示什么?(缓慢下降)为什么08到09年的游客人数会有小幅度的下降,你认为是什么原因?师:我们的数学学习要和生活实际联系起来,这样才能使我们的数学学习更有价值。
(4)出示快速下降的线,像这样的变化趋势表示什么?(快速下降)(5)除了这些变化情况,当线是水平的,就表示数量没有发生变化,就是不变。
【设计意图:通过多媒体的动画效果让学生理解折线统计图是通过线来表示数量的变化,动画的效果比较生动,对学生的理解有很大的帮助。
】4、师:刚才我们是一条一条线段来看这种变化的,但我们看待问题,不能只关注局部的变化,还要关注整体变化。
请你们看这幅折线统计图,感觉05年到10年的人数整体有什么变化趋势?生:05年-10年的游客人数总体在上升师:虽然08-09年的游客人数在小幅度的下降,但是05-10年的游客人数整体是上升趋势。
【设计意图:引导学生看待问题不能只关注局部的变化,还要关注整体变化。
polyak 重球法
Polyak重球法百分号百分号是一种优化算法,用于改进梯度下降法的收敛速度百分号百分号。
Polyak重球法(Polyak Heavy-Ball Method)百分号百分号是在传统梯度下降法的基础上增加了动量项百分号百分号。
在传统的梯度下降法中,更新规则通常为\( x_{k+1} = x_k - \alpha_k
abla f(x_k) \),其中( \alpha_k \) 是学习率,而\(
abla f(x_k) \) 是函数在( x_k \) 点的梯度。
而在Polyak重球法中,这个更新规则会加入一个动量项,该动量项与前一步的更新方向有关,以此来增加稳定性并提高收敛速度。
此外,Polyak重球法在理论上被证明在某些条件下能匹配Nesterov加速梯度下降法的下界,这意味着它在无限维空间定义的函数上可以保证与Nesterov方法相同的渐近收敛速率。
Polyak重球法通过引入动量来改善优化过程,并在一些情况下能达到与其他先进优化方法相媲美的收敛速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2013-2014(1)专业课程实践论文
题目:最速下降法
一、算法理论
1.最速下降法的基本原理
在基本迭代公式k k k k P t X X +=+1中,每次迭代搜索方向k P 取为目标函数
)(X f 的负梯度方向,即)(k k X f P -∇=,而每次迭代的步长k t 取为最优步长,
由此确定的算法称为最速下降法。
为了求解问题)(min X f ,假定我们已经迭代了k 次,获得了第k 个迭代点
k X 。
现在从k X 出发,可选择的下降方法很多,一个非常自然的想法是沿最速
下降方向(即负梯度方向)进行搜索应该是有利的,至少在k X 邻近的范围内是这样。
因此,去搜索方向为
)(k k X f P -∇=.
为了使目标函数在搜索方向上获得最多的下降,沿k P 进行一维搜索,由此得到第1+k 个跌带点,即
)(1k k k k X f t X X ∇-=+,
其中步长因子k t 按下式确定
))((min ))((k k k k k k X f t X f X f t X f ∇-=∇-,
))((1k k k X f X ls X ∇-=+ (1) 显然,令 ,2,1,0=k 就可以得到一个点列 ,,,210X X X ,其中0X 是初始点,由计算者任意选定。
当)(X f 满足一定的条件时,由式(1)所产生的点列}{k X 必收敛于)(X f 的极小点。
下面为书写方便,记)()(X f X g ∇=。
因此)()(k k k X f X g g ∇==. 2.牛顿法的基本原理
设最优化问题为)(min X f ,其中1:R R f n →二阶可导,He sse 矩阵
)(2X f ∇正定。
不妨设经过k 次迭代已获点k X ,现将)(X f 在k X X =处展成二阶泰勒公式,于是有
))(()(2
1
)()()()()(2k k T k k T k k X X X f X X X X X f X f X Q X f -∇-+-∇+=≈
显然)(X Q 是二次函数,特别由假设知)(X Q 还是正定二次函数,所以
)(X Q 是凸函数且存在唯一全局极小点。
为求此极小点,令
0))(()()(2=-∇+∇=k k k X X X f X f X Q
即可解得
)()]([12k k k X f X f X X ∇∇-=-,
亦即
)()]([121k k k k X f X f X X ∇∇-=-+ (2) 对照基本迭代公式
k k k k P t X X +=+1
易知,式(2)中的搜索方向
)()]([12k k k X f X f P ∇∇-=- (3) 步长因子1=k t 。
换句话说从点k X 出发沿搜索方向
)()]([12k k k X f X f P ∇∇-=-
并取步长1=k t 即可得)(X Q 的极小点1+k X 。
因此,
)()]([12k k k X f X f P ∇∇-=-
是直指点k X 处近似二次函数)(X Q 的极小点的方向。
此时称
)()]([12k k k X f X f P ∇∇-=-
为从点k X 出发的Nowton 方向。
从初始点开始,每一轮从当前迭代点出发,沿Nowton 方向并取步长1=k t 的算法称为牛顿法。
二、算法框图
function y = minSpeed2(functions,var,x0,a,stepNum)
%functions is a function of var,for example
%x = [x1,x2,x3,x4] y = x*x.';
%var is a variable array like [x1,x2,x3,...]
%you shouldn't like [a,b,c,d,...] or other kinds.
%x0:起始迭代值 a:迭代步长
VF = jacobian(functions,var);
x = zeros([1001,length(x0)]);
x(1,:) = x0;
for k=1:stepNum
x(k+1,:)=x(k,:)-a*double( vpa( subs(VF,var(1:end),x(k,:)))); end;
if length(x0)==2
plot(x(1:k,1),x(1:k,2),'o-');grid on;
end;
if length(x0)==3
plot3(x(1:k,1),x(1:k,2),x(1:k,3),'o-');grid on;
end;
disp(x(stepNum,:));
y = x(stepNum,:);
例1.利用最速下降法求函数222121)4()5(),(++-=x x x x f 的最小值点。
初值点位x1=1,x2=-2 。
解:输入: >> syms x1 x2;
>> fg = (x1-5).^2+(x2+4).^2;
>> minSpeed2(fg,[x1 x2],[1 -2],0.01,300) 输出:
例2.利用最速下降法求函数2
2212143),(x x x x f +=的最小值点。
初值点位x1=1,x2=1。
解:输入: >> syms x1 x2;
>> fg = x1.^2+4*x2.^2;
>> minSpeed2(fg,[x1 x2],[1 1],0.01,200)
例3.利用最速下降法求函数222121)4(-)5(),(+-=x x x x f 的最小值点。
初值点位x1=1,x2=-2。
解:输入: >> syms x1 x2;
>> fg = (x1-5).^2-(x2+4).^2;
>> minSpeed2(fg,[x1 x2],[1 -2],0.01,300)
例4.利用最速下降法求函数2
22
1214-3),(x x x x f =的最小值点。
初值点位x1=1,x2=1。
解:输入: >> syms x1 x2;
>> fg = x1.^2-4*x2.^2;
>> minSpeed2(fg,[x1 x2],[1 1],0.01,200)。