电动推进系统用永磁无刷直流电动机设计分析
永磁直线直流无刷电动机控制系统设计及实验研究
Sci ence an Tech d nol ogy nno I vaton i Her d al
研 究 报 告
永 磁 直 线 直流 无 刷 电动机 控 制 系 统设 计 及 实验 研 究
高 鑫
( 广东省 电力设计 研 究院 广州 5 0 6 ) 1 6 3
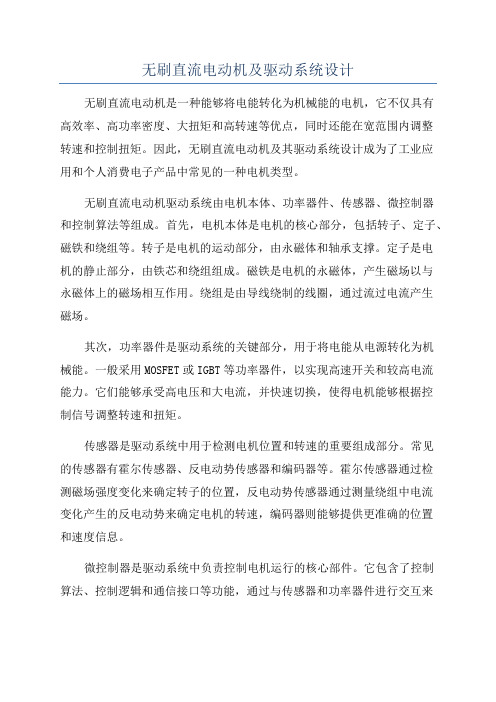
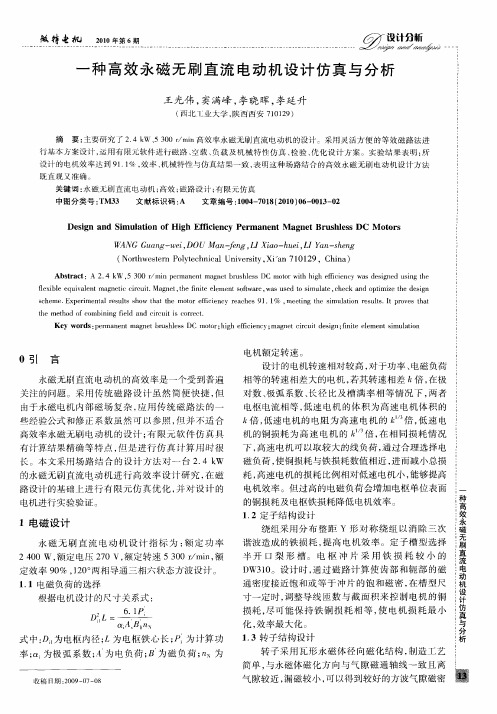
摘 要: 本文详细介铝 了 ̄ TD P M 3 0 F 4 7 S T s 2 L 2 0 的永磁直线直流无刷 电动机硬 件设计和控制方法 , 出了电机的控 制程序 流程, 给 试验结 果 表 明本 方法 简单 可行 。 关键词 : S P M 控制 系统 试验 DP W 中 图分 类 号 : 2 4 U 6 文 献标 识 码 : A 文 章编 号 : 6 4 0 8 ( 0 o 1 () 0 0 — 2 1 7 — 9 X 2 1 ) 2b一 0 2 0
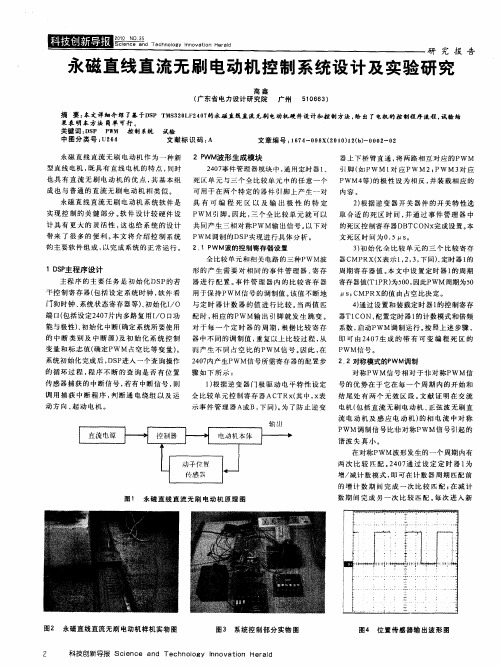
永磁 直 线 直 流 无 刷 电动 机 作 为 一 种 新 2 P WM波形生成模块 型 直 线 电机 , 具有 直 线 电机 的 特 点 , 既 同时 2 0 事件 管 理器 模块 中, 用定时 器 1 47 通 、
器上 下桥 臂 直 通 , 两 路相 互 对 应 的PW M 将 引 脚 ( PW M 对 应 PWM 2; 如 l PW M 3 应 对
器Tl ON, 置定时 器 1 C 配 的计数 模式 和 倍频
系数 , 启动PW M调 制 运行 。 照上 述步 骤 , 按
的 中断 类 别 及 中 断源 ) 初 始 化 系 统 控 制 器 中不 同的 调 制值 , 复 以上 比 较 过 程 , 及 重 从 即 可 由2 07 成 的 带 有 可 变 编 程 死 区 的 4 生 变 量 和 标 志 值 ( 定P M 占空 比 等 变 量 ) 确 W 。 而 产 生 不 同 占空 比 的P M信 号 。 此 , W 因 在 PWM信 号 。 系统 初 始化 完成 后 , S 进入 一 个查 询 操作 2 0 内产生 P M信号所 需 寄存 器 的配 置步 2 2对称 模式 的P D P 47 W WM调 制
无刷直流电动机及驱动系统设计
无刷直流电动机及驱动系统设计无刷直流电动机是一种能够将电能转化为机械能的电机,它不仅具有高效率、高功率密度、大扭矩和高转速等优点,同时还能在宽范围内调整转速和控制扭矩。
因此,无刷直流电动机及其驱动系统设计成为了工业应用和个人消费电子产品中常见的一种电机类型。
无刷直流电动机驱动系统由电机本体、功率器件、传感器、微控制器和控制算法等组成。
首先,电机本体是电机的核心部分,包括转子、定子、磁铁和绕组等。
转子是电机的运动部分,由永磁体和轴承支撑。
定子是电机的静止部分,由铁芯和绕组组成。
磁铁是电机的永磁体,产生磁场以与永磁体上的磁场相互作用。
绕组是由导线绕制的线圈,通过流过电流产生磁场。
其次,功率器件是驱动系统的关键部分,用于将电能从电源转化为机械能。
一般采用MOSFET或IGBT等功率器件,以实现高速开关和较高电流能力。
它们能够承受高电压和大电流,并快速切换,使得电机能够根据控制信号调整转速和扭矩。
传感器是驱动系统中用于检测电机位置和转速的重要组成部分。
常见的传感器有霍尔传感器、反电动势传感器和编码器等。
霍尔传感器通过检测磁场强度变化来确定转子的位置,反电动势传感器通过测量绕组中电流变化产生的反电动势来确定电机的转速,编码器则能够提供更准确的位置和速度信息。
微控制器是驱动系统中负责控制电机运行的核心部件。
它包含了控制算法、控制逻辑和通信接口等功能,通过与传感器和功率器件进行交互来实现对电机转速、扭矩和方向的精确控制。
微控制器能够根据输入的控制信号,通过调节电流和电压来控制电机的运行状态。
最后,控制算法是驱动系统的重要组成部分,在实际应用中起到至关重要的作用。
常见的控制算法包括PID控制、电流环控制、速度环控制和位置环控制等。
PID控制通过调整比例、积分和微分控制器的系数来达到稳定控制的效果。
电流环控制通过直接或间接测量电机电流,以控制电机的转矩和速度。
速度环控制通过测量电机转速,并根据所需转速和实际转速之间的差异来调整控制信号。
无刷直流电动机与永磁同步电动机的结构和性能比较

无刷直流电动机与永磁同步电动机的结构和性能比较1.在电动机结构与设计方面这两种电动机的基本结构相同,有永磁转子和与交流电动机类似的定子结构。
但永磁同步电动机要求有一个正弦的反电动势波形,所以在设计上有不同的考虑。
它的转子设计努力获得正弦的气隙磁通密度分布波形。
而无刷直流电机需要有梯形反电动势波,所以转子通常按等气隙磁通密度设计。
绕组设计方面进行同样目的的配合。
此外,BLDC控制希望有一个低电感的绕组,减低负载时引起的转速下降,所以通常采用磁片表贴式转子结构。
内置式永磁(IPM)转子电动机不太适合无刷直流电动机控制,因为它的电感偏高。
IPM结构常常用于永磁同步电动机,和表面安装转子结构相比,可使电动机增加约15%的转矩。
2.转矩波动两种电动机性能最引人关注的是在转矩平稳性上的差异。
运行时的转矩波动由许多不同因素造成,首先是齿槽转矩的存在。
已研究出多种卓有成效的齿槽转矩最小化设计措施。
例如定子斜槽或转子磁极斜极可使齿槽转矩降低到额定转矩的1%~2%以下。
原则上,永磁同步电动机和无刷直流电动机的齿槽转矩没有太大区别。
其他原因的转矩波动本质上是独立于齿槽转矩的,没有齿槽转矩时也可能存在。
如前所述,由于永磁同步电动机和无刷直流电动机相电流波形的不同,为了产生恒定转矩,永磁同步电动机需要正弦波电流,而无刷直流电动机需要矩形波电流。
但是,永磁同步电动机需要的正弦波电流是可能实现的,而无刷直流电动机需要的矩形波电流是难以做到的。
因为无刷直流电动机绕组存在一定的电感,它妨碍了电流的快速变化。
无刷直流电动机的实际电流上升需要经历一段时间,电流从其最大值回到零也需要一定的时间。
因此,在绕组换相过程中,输入到无刷直流电动机的相电流是接近梯形的而不是矩形的。
每相反电动势梯形波平顶部分的宽度很难达到120°。
正是这种偏离导致无刷直流电机存在换相转矩波动。
在永磁同步电动机中驱动器换相转矩波动几乎是没有的,它的转矩纹波主要是电流纹波造成的。
一种高效永磁无刷直流电动机设计仿真与分析
t e m eh d o o h t o fc mbii g fed a d cr u ti o r c . n n l n ic i s c re t i Ke r y wo ds: e m a n g e r s ls p r ne tma n tb u h e sDC tr; ih f c e c m a ne ic td sg fnt lme tsmult n moo h g e i n y; g tc rui e i n;i ie ee n i i ai o
微 持电棚 20 第 期 0 年 6 1
… 一 … 一 ~ . 一 一 … … 一 一
一
=
!
一 一 一
种 高效 永磁 无刷 直 流ቤተ መጻሕፍቲ ባይዱ电 动机 设 计 仿 真 与分 析
王 光 伟 , 满峰 , 晓 晖 , 延 升 窦 李 李
( - ]业 大 学 , 西 西 安 7 0 2 ) 西 i2 1  ̄ 陕 119
既 直 观 又 准确 。
关 键 词 : 磁 无 刷 直 流 电动 机 ; 效 ; 路 设 计 ; 限 元 仿 真 永 高 磁 有 中 图分 类号 : M3 T 3 文献标识码 : A 文章 编 号 :0 4 7 1 (00 0 — 0 3 0 10 — 0 8 2 1 ) 6 0 1 — 2
倍, 低速 电机 的 电阻 为 高 速 电机 的 倍, 低速 电 j j
机的铜损耗为高速电机 的 倍, 在相 同损耗情况 ;
下, 高速 电机 可以取 较大 的线 负荷 , 通过合 理选 择 电
有 计算 结果精 确 等特 点 , 是 进 行 仿 真 计算 用 时很 但
长 。本 文采用 场 路 结 合 的设 计 方 法 对 一 台 2 4 k . W 的永磁 无刷直 流 电动 机 进 行 高 效率 设 计 研 究 , 磁 在 路设 计 的基 础上进 行 有 限元 仿 真 优化 , 对设 计 的 并
永磁无刷直流电机控制系统设计

永磁无刷直流电机控制系统设计1.电机模型的建立:建立电机的数学模型是进行控制系统设计的第一步。
永磁无刷直流电机可以使用动态数学模型来描述其动态特性,常用的模型包括简化的转子动态模型和电动机状态空间模型。
简化的转子动态模型以电机的电磁转矩方程为基础,通过建立电机的电流-转速模型来描述电机的动态响应。
这个模型通常用于低频控制和电机启动阶段的设计。
电动机状态空间模型则是通过将电机的状态变量表示为电流和转速变量,用微分方程的形式描述电机的动态特性。
这个模型适用于高频控制和电机稳态响应分析。
2.控制器设计:经典的控制方法包括比例积分控制器(PI)和比例积分微分控制器(PID)。
比例积分控制器是最简单的控制器,通过调节电流的比例增益和积分时间来控制电机的速度。
这种控制器适用于低精度控制和对动态响应要求不高的应用。
比例积分微分控制器在比例积分控制器的基础上增加了微分项,通过调节微分时间来控制系统的阻尼比,提高系统的稳定性和动态响应。
3.参数调节:在控制器设计中,参数调节和整定是非常重要的环节,主要包括根据系统的要求选择合适的控制器参数,并进行优化。
参数调节可以通过试探法、经验法和优化算法等方法进行。
其中,试探法和经验法是相对简单的方法,通过调整控制器的参数值来达到稳定运行或者较好的控制性能。
优化算法可以通过数学模型和计算机仿真的方式进行,通过优化目标函数和约束条件,得到最合适的控制器参数。
总结起来,永磁无刷直流电机控制系统设计主要包括电机模型的建立、控制器设计和参数调节。
在设计过程中,需要根据系统的要求选择合适的控制器,通过参数调节和优化算法来提高系统的稳定性和动态性能。
无刷直流永磁电动机设计流程和实例

无刷直流永磁电动机设计实例一. 主要技术指标1. 额定功率:W 30P N =2. 额定电压:V U N 48=,直流3. 额定电流:A I N 1<3. 额定转速:m in /10000r n N =4. 工作状态:短期运行5. 设计方式:按方波设计6. 外形尺寸:m 065.0036.0⨯φ二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P '直流电动机 W P K P NNm i 48.4063.03085.0'=⨯==η,按陈世坤书; 长期运行 N i P P ⨯''+='ηη321 短期运行 N i P P ⨯''+='ηη431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比L/D λ′=27.计算电枢内径m n B A P D N s i i i 23311037.110000255.0110008.048.401.61.6-⨯=⨯⨯⨯⨯⨯=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-⨯= 8. 气隙长度m 3107.0-⨯=δ 9. 电枢外径m D 211095.2-⨯= 10. 极对数p=111. 计算电枢铁芯长 m D L i 221108.2104.12--⨯=⨯⨯='='λ根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-⨯12. 极距 m p D i 221102.22104.114.32--⨯=⨯⨯==πτ 13. 输入永磁体轴向长m L L m 2108.2-⨯==三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22110733.06104.114.3--⨯=⨯⨯==π3. 槽形选择梯形口扇形槽,见下图;4. 预估齿宽: m K B tB b Fe t t 2210294.096.043.155.010733.0--⨯=⨯⨯⨯==δ ,t B 可由设计者经验得,t b 由工艺取m 210295.0-⨯5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056.196.0255.08.02.222-⨯=⨯⨯⨯⨯=≈Φ=δδτ1j B 可由设计者经验得,1j h 由工艺取m 210325.0-⨯根据齿宽和轭高作出下图,得到具体槽形尺寸6. 气隙系数 135.1)5()5(2010101=-++=b b t b t K δδδ7.电枢铁心轭部沿磁路计算长度m h ph h D L j ij t i i 2111110064.2)21(2)2(-⨯=+-⨯++=απ8.槽面积2410272.0m S -⨯=电枢铁芯材料确定从数据库中读取电枢冲片材料DW540-50电枢冲片叠片系数96.01=Fe K 电枢冲片材料密度331/1075.7m j ⨯=ρ电枢冲片比损耗kg W p s /16.2)50/10(=四.转子结构1. 转子结构类型:瓦片磁钢径向冲磁2. 永磁体外径m D D i m 211026.12-⨯=-=δ3. 永磁体内径m H D D m m mi 21086.02-⨯=-=4. 永磁体极弧系数8.0=m α5. 紧圈外经D 2=m 21032.1-⨯6. 永磁材料磁化方向截面积24221043.421026.114.3108.28.02m p D L S mm m m ---⨯=⨯⨯⨯⨯⨯==πα7. 永磁材料的选取永磁体材料:钕铁硼 剩磁r B :矫顽力c H :796 kA/m 永磁体材料密度m ρ:cm 38. r B 对应的磁通Wb S B m r r 41087676.4-⨯=⋅=φ 9.c H 对应的磁势A D D H F mim c c 3200)2(2=-= 10. 转子轭材料选择由于转子较细,故转轴、磁轭为一体,选用10号钢 11.转子磁轭等效宽度 m D D D D b i mi i e j 22222221033.02102.01086.022---⨯=⨯-⨯=-=-=12.转子磁轭沿磁路方向长度瓦片m pD D b L mii e j j 222221083.0)21(4)(-⨯=-++=απ五、磁路计算1. 漏磁系数2.1=σ2. 气隙磁通δδδταB L B i 926.4==Φ3.空载电枢齿磁密δδδB B K b t B B Fe t t 588.296.010295.010733.022=⨯⨯⨯⨯==-- 4. 空载电枢轭磁密δδδB B L K h B Fe j j 819.28.296.0325..02926.4211=⨯⨯⨯=Φ=5. 空载转子轭磁密δδδσB B L b B j j 198.38.233.02926.42.1222=⨯⨯⨯=Φ= 6. 气隙磁势A B B B K F 462610127.010135.11007.06.1106.1⨯=⨯⨯⨯⨯⨯=⨯=-δδδδδδ7. 定子齿磁势A H H h H F t t t t t 22109.01045.022--⨯=⨯⨯== 8. 定子轭部磁势A H L H F j j j j 211110064.2-⨯== 9. 转子轭部磁势A H L H F j j j j 222221083.0-⨯== 10. 总磁势∑+++=21j j t F F F F F δ 11. 总磁通Wb B m 410926.42.1-⨯⨯=Φ=Φδδσ12.空载特性曲线计算见表;因为表面磁钢永磁电机电动机负载时气隙的合成磁场与空载时差不多;六.电路计算1. 绕组形式及电子开关形式:两相导通星形三相六状态 2. 绕组系数采用单层集中整距绕组,即 第一节距)(31槽==τy 每极每相槽数12pmZq ==m 是相数;p 为极对数 故绕组系数1=w K3. 预取空载转速m in /120000r n =' 4. 每相绕组串联匝数φW '0.7V U 24.8025.700为管子压降,取匝,∆=Φ'∆-='δφαpn UU W i取匝82W =φ5. 电枢总导体数根4922==φmW N6. 实际每槽导体数N s =N/Z=82根7. 实际空载转速0nmin /11742109039.28217.02488.05.725.7400r pW U U n i=⨯⨯⨯⨯-⨯⨯=Φ∆-=-δφα8. 计算绕组端部长度m pD D pDav l i b 211101.42)2)(2.122.1-⨯=+=='ππ 9. 计算电枢绕组每匝平均长度m l L L bav 2108.13)(2-⨯='+= 10. 预估导线截面积2661007086.01101463.04830m a J U P S aN N c-⨯=⨯⨯⨯⨯=''='η 式中26'/1014m A J a⨯=为预取导线电流密度 1=a 为每相绕组支路数 11. 导线选取选择F 级绝缘导线QZY-2 导线计算截面积26210066.04m d S c c -⨯==π导线最大截面积262max max 10092.04m d S c c -⨯==π导线直径md m d c c 3max 310342.01029.0--⨯=⨯=12. 槽满率计算公式选择35.01042max=⨯⋅=-S c s s S S N K π13. 实际导线电流密度26'/1015m A aS U P J c N Na ⨯==η 14. 每相电枢绕组电阻Ω==⨯=Φ-31022)20(62)20(20cavcava S a l W S ma Nl r ρρ式中)/(0157.02)20(m mm ⋅Ω=ρ为导线的电阻率 设电机绕组的工作温度t 为75C 0,则导线工作温度电阻Ω=⨯-+=65.3])20(1[20t a at p t r r 式中00395.0=t p 为导线的电阻温度系数七.电枢反应计算1. 起动电流 A r UU I atst 77.722=∆-=2. 起动时每极直轴电枢反应最大值A K W I F w st sdm 27643==φ 3. 额定工作时的反电动势 V n W pC N ie 5.39152'==δφφα 4. 额定工作时电枢电流 A r EU U I ata 97.022=-∆-=5. 额定工作时最大直轴去磁磁势A K W I F W a adm 3443==φ 6. 负载工作点:根据sdm F 和adm F ,可在空载永磁体工作图上作出负载和起动时的特性曲线2、3,求负载特性曲线与永磁体去磁曲线的交点,得负载工作点:负载气隙磁感应强度T B 5872.0=δ 负载气隙磁通Wb 4108925.2-⨯=Φδ负载电枢齿磁感应强度t B = 负载电枢轭磁感应强度j B =7. 额定工作时电磁转矩m N I W pT a iem .0366.04==δφφπα8. 起动电磁转矩 m N I C T st T st .293.0=Φ=δ 八. 性能计算1. 电枢铜损W r I p at a Cu 87.622== 2. 电枢铁损W G B G B f p K p j j t t a Fe 11.4)()50)(50/10(12123.1=+= 式中a K ------铁损工艺系数,取2=a K1j G ------定子轭重kg L h D D G j s j 05816.010])2([43211211=⨯--=-πρt G ------定子齿重kg ZL h b G t t s t 0173.0103=⨯=-ρ3. 轴承摩擦损耗W n G K p N p mp mpn 05.1103=⨯=-Kmp=3,p G 为磁钢重 转子轭重 转轴重 传感器转子重的和 3=mp K 为默认情况,可让用户自己指定kg G G G G r g m p 035.0=++=4. 风损W L n D p N mpb 13.01026332=⨯=-5. 机械损耗和铁损W p p p p mpb mpn Fe 29.5=++='6. 考虑到附加损耗后的机械损耗和铁损 W p p 877.63.1='=系数可选 7. 开关管损耗W U I p a 358.12=∆⨯=∆8. 电机总损耗W p p p p Cu 1.15=++=∆∑9. 输入功率W I U P a N 56.461==10. 输出功率W p P P N 46.311=-=∑ 11. 效率%57.67%1001=⨯=P P N η 12. 摩擦转距m N n p T N.00657.056.90== 13. 额定输出转距 m N T T T em .03.002=-=。
无刷直流电机设计与性能分析
无刷直流电机设计与性能分析随着电动汽车的普及和工业自动化的发展,无刷直流电机作为一种高效、精准、可控性强的电机,越来越受到工程师和研究人员的关注。
本文将探讨无刷直流电机的设计原理、性能分析以及相关应用。
一、无刷直流电机的设计原理无刷直流电机是一种利用反电动势将电能转化为机械能的装置。
与传统的直流电机相比,无刷直流电机不需要传统的碳刷和电刷组,可以减少能耗和机械磨损。
其主要部件包括定子、转子和电子调速器。
定子是无刷直流电机的固定部分,由若干个电磁铁组成。
转子则由磁铁和导电线圈构成。
电子调速器是控制整个电机的核心部件,负责接收和处理信号,并驱动转子旋转。
在无刷直流电机的工作过程中,电流通过定子的电磁铁,产生磁场。
电子调速器根据传感器返回的信号,控制定子电磁铁的通电状态,从而产生电磁力。
这个电磁力作用在转子的磁铁上,使转子旋转。
转子的旋转又会产生反电动势,通过电子调速器的处理,控制整个系统的转速和转向。
二、无刷直流电机的性能分析无刷直流电机的性能主要包括转速、转矩和效率。
1. 转速:无刷直流电机的转速取决于电子调速器的驱动信号和负载情况。
通常情况下,当负载较小时,转速较高。
而随着负载的增加,转速会逐渐降低。
2. 转矩:转矩是电机转动时产生的力矩。
无刷直流电机的输出转矩与电流成正比。
当电流增大时,输出转矩也会随之增大。
同时,转矩还受到电机的结构设计和磁铁材料的影响。
3. 效率:无刷直流电机的效率通常指电机的转动效率,即将输入的电能转化为机械功的比例。
高效率的无刷直流电机可以减少能源消耗和热量产生。
三、无刷直流电机的应用无刷直流电机在许多领域具有广泛的应用。
以下是几个典型的应用案例:1. 电动汽车:无刷直流电机作为电动汽车的动力源,具有高效率、低噪音和快速响应的特点。
它可以驱动汽车前进、制动和转向,成为电动汽车领域的关键技术。
2. 工业自动化:无刷直流电机作为工业自动化装置的驱动装置,广泛应用于机器人、传送带、工业机床等设备中。
(毕业论文)永磁无刷直流电机论文
小功率永磁无刷直流电动机的设计和仿真研究摘要永磁无刷直流电动机是把电机、电子和稀土材料的高新技术产品发展紧密的结合在一起的新型电机,它具有单位体积转矩高、重量轻、转矩惯量小、控制简单、能耗少和调速性能好等优点,因而在航天航空、数控机床、机器人、汽车、计算机外围设备、军事等领域及家用电器等方面都获得了广泛的应用。
因此,设计性能优异的永磁无刷直流电机具有重要的理论意义和应用价值。
本论文系统的研究了35w小功率永磁无刷直流电机的本体设计,包括设计方法、有限元分析、性能计算、软件仿真等。
本文主要的研究内容如下:1、综述了永磁无刷直流电机的研究现状、存在问题和发展前景,分析了永磁无刷直流电机的基本理论。
2、建立永磁无刷直流电机的数学模型,先利用解析法对该电机进行电磁设计,然后利用有限元法对电机进行优化。
3、基于星形连接三相三状态的控制电路,利用Infolytic公司的MagNet电磁场分析软件建立了永磁无刷直流电机的有限元分析模型,仿真分析其静态气隙磁场分布及动态带负载时的电机特性。
并将软件仿真所得结果与设计计算结果进行比较分析,验证了设计方法的正确性。
关键词:电机设计,无刷直流电动机,有限元分析,稳态特性第一章绪论1.1永磁无刷直流电动机的发展状况永磁无刷直流电动机是一种新型的电动机,其应用广泛,相关技术仍然在不断的发展中,该类电动机的发展充分体现了现代电动机理论、电力电子技术和永磁材料的发展过程。
其中,永磁材料、大功率开关器件、高性能微处理器等的快速发展对永磁无刷直流电动机的进步功不可没。
1821年9月,法拉第建立的世界上第一台电机就是永磁电机,自此奠定了现代电机的基本理论基础。
十九世纪四十年代,人们研制成功了第一台直流电动机。
1873年,有刷直流电动机正式投入商业应用。
从此以后,有刷直流电动机就以其优良的转矩特性在运动控制领域得到了广泛的应用,占据了极其重要的地位。
随着生产的发展和应用领域的扩大,对直流电动机的要求也越来越高。
无刷直流电动机的设计
无刷直流电动机的设计无刷直流电动机(BLDC)是一种基于电子换向器和磁传感器的新型电机,具有高效率、高功率密度、高可靠性、无摩擦等优点,广泛应用于工业、农业、家电和汽车等领域。
本文将介绍无刷直流电动机的设计原理、设计流程和一些关键技术。
一、设计原理无刷直流电动机的工作原理是利用永磁体和电流产生的磁场相互作用,从而产生转矩。
它的转子由一个或多个永磁体组成,通过电流换向器控制电流的方向,从而实现转子的旋转。
无刷直流电动机通常采用三相设计,每相之间的换向角为120度。
二、设计流程1.确定电机的额定功率和转速。
根据设计要求,确定电机的额定功率和转速。
这些参数将决定电机的尺寸、材料和冷却方式等。
2.选择永磁材料和磁路设计。
根据电机的运行环境和功率需求,选择合适的永磁材料。
同时,设计磁路以确保磁通密度的均匀分布和最小的磁路损耗。
3.设计定子绕组和绝缘系统。
根据电机的功率和电压要求,设计定子绕组。
同时,设计合适的绝缘系统以确保电机的安全性和可靠性。
4.确定电流换向器的拓扑和控制策略。
选择合适的电流换向器拓扑(如半桥、全桥等)以及控制策略(如PWM控制、电流环控制等),以实现电机的换向操作。
5.进行磁场分析和电磁设计。
通过磁场分析软件,进行电磁设计。
通过磁场分析,可以得到电机的特性曲线、转矩和功率密度等指标。
6.进行结构设计和热分析。
根据电机的尺寸和电机的工作环境,进行结构设计和热分析。
结构设计要考虑机械强度、制造成本等因素,热分析要考虑散热方式和绝缘系统。
7.制造和测试。
根据设计图纸进行电机的制造。
制造完成后,进行测试,通过测试结果对电机的设计进行修正和优化。
三、关键技术1.电磁设计技术。
电磁设计是无刷直流电动机设计的核心技术,它涉及到永磁体选材、磁路参数计算、磁场分析等方面。
2.电流换向器设计技术。
电流换向器是控制无刷直流电动机运行的关键部件,它的设计直接影响到电机的性能。
目前常用的换向器有半桥、全桥等拓扑,选择合适的拓扑和控制策略对电机的效率和稳定性有重要影响。
无刷直流电机控制系统的设计——毕业设计
无刷直流电机控制系统的设计——毕业设计学号:1008421057本科毕业论文(设计)(2014届)直流无刷电机控制系统的设计院系电子信息工程学院专业电子信息工程姓名胡杰指导教师陆俊峰陈兵兵高工助教2014年4月摘要无刷直流电机的基础是有刷直流电机,无刷直流电机是在其基础上发展起来的。
现在无刷直流电机在各种传动应用中虽然还不是主导地位,但是无刷直流电机已经受到了很大的关注。
自上世纪以来,人们的生活水平在不断地提高,人们在办公、工业、生产、电器等领域设备中越来越趋于小型化、智能化、高效率化,而作为所有领域的执行设备电机也在不断地发展,人们对电机的要求也在不断地改变。
现阶段的电机的要求是高效率、高速度、高精度等,由此无刷直流电机的应用也在随着人们的要求的转变而不断地迅速的增长。
本系统的设计主要是通过一个控制系统来驱动无刷直流电机,主要以DSPIC30F2010芯片作为主控芯片,通过控制电路采集电机反馈的霍尔信号和比较电平然后通过编程的方式来控制直流无刷电机的速度和启动停止。
关键词:控制系统;DSPIC30F2010芯片;无刷直流电机AbstractBrushless dc motor is the basis of brushless dc motor, brushless dc motor is developed on the basis of its. Now in all kinds of brushless dc motor drive applications while it is not the dominant position, but the brushless dc motor has been a great deal of attention.Since the last century, constantly improve the people's standard of living, people in the office, industrial, manufacturing, electrical appliances and other fields increasingly tend to be miniaturization, intelligence, high efficiency, and as all equipment in the field of motor is in constant development, people on the requirements of the motor is in constant change. At this stage of the requirements of the motor is high efficiency, high speed, high precision and so on, so is the application of brushless dc motor as the change of people's requirements and continuously rapid growth.The design of this system mainly through a control system to drive the brushless dc motor, mainly dspic30f2010 chips as the main control chip, through collecting motor feedback control circuit of hall signal and compare and then programmatically to control the speed of brushless motor and started to stop.Keywords: Control system; dspic30f2010 chip; brushless DC motor目录摘要 (I)Abstract (III)目录 (IV)1 引言 01.1 研究背景及意义 01.2 国内外研究现状 (1)1.3 设计任务与要求 (1)2 基本理论 (1)2.1 无刷直流电机的结构以及基本原理 (1)2.2 无刷直流电机的运行特性 (4)2.3 无刷直流电机的应用 (5)3 直流无刷直流电机控制系统的设计 (6)3.1 无刷直流电动机系统的组成部分 (6)3.2 无刷直流电机控制系统的设计 (8)4 直流无刷电机的电路设计 (9)4.1 开关电路的设计 (9)4.2 保护电路的设计 (9)4.3 驱动电路的设计 (10)4.4 反馈电路的设计 (10)4.5 电源电路的设计 (11)5 直流无刷电机控制系统的软件设计 (11)5.1 系统功能的实现 (12)5.2 软件流程图 (12)6 实物成果及展望 (13)致谢 (16)参考文献 (16)附录 (19)1 引言近年来随着微电子技术自动控制技术和新型永磁材料的发展,无刷直流电机的应用越来越广泛。
无刷直流电机控制系统的仿真与分析
无刷直流电机控制系统的仿真与分析一、本文概述随着科技的不断进步和电机技术的快速发展,无刷直流电机(Brushless Direct Current, BLDC)因其高效、低噪音、长寿命等优点,已广泛应用于电动汽车、无人机、家用电器等众多领域。
然而,无刷直流电机的控制系统设计复杂,涉及电子技术、控制理论、电机学等多个学科领域,因此,对其进行深入研究和仿真分析具有重要意义。
本文旨在探讨无刷直流电机控制系统的基本原理、仿真方法以及性能分析。
将简要介绍无刷直流电机的基本结构和控制原理,包括其电机本体、电子换向器、功率电子电路等关键部分。
将详细介绍无刷直流电机控制系统的仿真建模过程,包括电机模型的建立、控制算法的设计以及仿真环境的搭建。
通过对仿真结果的分析,评估无刷直流电机控制系统的性能,包括动态响应、稳态精度、效率等指标,并提出优化建议。
本文的研究不仅有助于深入理解无刷直流电机控制系统的运行机制和性能特点,还可为实际工程应用提供理论支持和指导。
通过仿真分析,可以预测和优化无刷直流电机控制系统的性能,提高系统的稳定性和可靠性,推动无刷直流电机在更多领域的应用和发展。
二、无刷直流电机控制系统基本原理无刷直流电机(Brushless DC Motor, BLDCM)是一种采用电子换向器替代传统机械换向器的直流电机。
其控制系统主要由电机本体、电子换向器(也称为功率电子电路或逆变器)以及控制器三部分组成。
无刷直流电机控制系统的基本原理,就在于如何准确地控制逆变器的开关状态,从而改变电机内部的电流流向,实现电机的连续旋转。
控制器根据电机的运行状态和用户的输入指令,生成适当的控制信号。
这些控制信号是PWM(脉宽调制)信号,用于控制逆变器的开关状态。
逆变器一般由六个功率开关管(如MOSFET或IGBT)组成,分为三组,每组两个开关管串联,然后三组并联在直流电源上。
每组开关管分别对应电机的一个相(A、B、C),通过控制每组开关管的通断,可以改变电机每相的电流大小和方向。
无刷直流电机控制系统设计
无刷直流电机控制系统设计无刷直流电机控制系统设计一、引言近年来,无刷直流电机由于其高效、低噪音和长寿命等特点,被广泛运用在各种领域,如电动汽车、无人机、工业机器人等。
无刷直流电机的控制系统是整个系统的核心,其设计的优劣直接影响到系统的性能和稳定性。
因此,对无刷直流电机控制系统的研究具有重要意义。
二、无刷直流电机基本原理无刷直流电机是一种将交流电转换成直流电的电机,其工作原理和普通直流电机基本相同。
传统的直流电机是通过换向器将直流电源提供的直流电转换成交流电,再通过电刷与换向器进行配合,使得电机能够正常转动。
然而,无刷直流电机通过内部的传感器,能够实时检测转子位置,在合适的时机切换相序,从而实现电机的转动。
其与直流电机相比,具有结构简单、寿命长、噪音低等特点。
三、无刷直流电机控制系统的组成无刷直流电机控制系统主要由传感器、电机驱动器和控制算法三部分组成。
1. 传感器传感器主要用于检测转子位置和转速等信息,常见的传感器有霍尔传感器、编码器等。
通过传感器获得的信息可以提供给控制系统,以便实时控制电机的工作状态。
2. 电机驱动器电机驱动器作为控制系统的核心部件,主要用于控制电机的转速和方向。
电机驱动器通常由功率放大器和控制电路组成,通过接收控制信号,控制电机的运行。
3. 控制算法控制算法是无刷直流电机控制系统的关键,常见的控制算法有电流反馈控制、速度反馈控制和位置反馈控制等。
通过对传感器获得的信息进行处理和分析,控制算法能够准确地控制电机的运行状态,实现所需的功能。
四、无刷直流电机控制系统设计无刷直流电机控制系统的设计需要考虑多个方面的因素,如控制精度、稳定性、响应速度等。
1. 选择合适的传感器传感器的选择直接影响到控制系统的精度和稳定性。
根据实际需求,选择适用的传感器,并进行合理的安装和校准。
2. 电机驱动器的设计电机驱动器需要根据电机的功率和转速等参数进行选择和设计。
选用合适的功率放大器和控制电路,确保电机能够正常工作,并满足系统的要求。
永磁无刷直流电动机毕业设计论文

永磁直流微电动机控制技术Permanent magnet DC micro-motor controltechnology专业:测控技术与仪器姓名:拓明方指导教师:申请学位级别:学士论文提交日期: 2015年月日学位授予单位:天津科技大学精美文档摘要传统直流电机中电刷和换向器的存在使得其结构变得复杂,而且换相时发生的械接触严重影响了电机运行的可靠性和稳定性,而且会缩短其使用寿命,极大的影响了电机的应用范围。
因此,长期以来科学家们都着力于研究能有效替代电刷和换向器的装置或控制方法。
伴随着微处理器技术和智能控制技术的发展以及永磁材料的出现,PMBDCM正在以其优越的性能逐步取代传统电机应用于各个领域。
其中无位置传感器的PMBDCM更是克服了位置传感器安装复杂、成本较高的缺陷,拥有可靠的工作性能和简单的电机结构等优势。
因此,针对无位置传感器的PMBDCM,本次毕业设计详细介绍PMBDCM 的结构和工作原理,以TMS320F2812芯片为核心设计了PMBDCM的无位置传感器控制系统的硬件电路,给出了模块化的软件设计思路;并选择硬件起动法和“反电动势”过零检测法来控制电机运行。
最后在MATLAB/SIMULINK环境下,采用模块化设计思路对无位置传感器的PMBDCM进行建模;并采用经典的双闭环控制方法对电机模型进行仿真,通过仿真结果证明了“反电动势”过零检测法的可行性。
关键词:PMBDCM;无位置传感器; TMS320F2812;“反电势”过零检测精美文档ABSTRACTTraditional DC motor has a complicated structure because of brush and commutator existence, and mechanical contact occurs when the commutation of a serious impact on the reliability and stability of the motor operation, as well as, it will shorten motor’s life, a great impact on the application range of the motor. scientists have long been focused on the study can effectively replace devices or control method brushes and commutator.With the development of microprocessor technology and intelligent control technology and permanent magnet material advent, PMBDCM is its superior performance to gradually replace Traditional motor used in various fields. Which PMBDCM position sensor-less is overcome complex and costly defects in position sensor mounted, possess reliable performance, simple motor structure and other advantages.Therefore, for the position sensor-less PMBDCM, this graduation design details of the structure and working principle on PMBDCM ,use TMS320F2812 chip as the core designed sensor-less control system hardware circuit and a modular software design ideas for PMBDCM, then, select hardware starting method and the "back-EMF" zero-crossing detection method to control the motor running.Finally, under the MATLAB / SIMULINK environment, build a position sensor-less PMBDCM model by modular design concept; and simulate motor model adopt the classic double-loop control method, the simulation results proved feasibility of the "back-EMF " zero-crossing detection method.Keywords: PMBDCM; Position sensor-less control; TMS320F2812; "back-EMF "zero-crossing detection精美文档目录1 绪论 (1)1.1永磁无刷直流电动机控制技术的研究概况 (1)1.2永磁无刷直流电动机的发展趋势 (2)1.3永磁无刷直流电动机的特点及应用 (3)1.3.1在航空航天中的应用 (3)1.3.2在汽车中的应用 (3)1.3.3在家用电器中的应用 (4)1.3.4在精密电子设备和器械中的应用 (5)1.4论文需要做的工作 (5)2 永磁无刷直流电动机的结构和原理 (6)2.1永磁无刷直流电动机的结构 (6)2.1.1电动机本体 (7)2.1.2位置传感器 (7)2.1.3逆变器(电子开关线路) (8)2.2永磁无刷直流电动机的基本工作原理 (9)2.2.1有刷直流电动机的工作原理 (9)2.2.2.无刷直流电动机工作原理 (10)2.3无刷和有刷直流电机的比较 (12)3 永磁无刷直流电动机的控制系统设计 (14)3.1控制系统的硬件设计 (14)3.1.1驱动电路及驱动保护模块 (15)3.1.2PIC16F877A芯片及控制系统原理图 (16)3.2控制系统的软件设计 (19)3.2.1软件设计 (19)3.2.2处理位置传感器的检测信号 (20)3.3本章小结 (20)精美文档4 永磁无刷直流电动机的无位置传感器控制技术 (22)4.1无位置传感器PMBDCM的控制系统硬件设计 (22)4.1.1控制系统框图 (22)4.1.2逆变器电路的设计 (23)4.1.3逆变器驱动电路设计 (23)4.1.4核心控制电路及外围电路 (24)4.2转子位置的检测及无位置传感器时电机的起动 (26)4.2.1反电势过零检测法原理和实现 (27)4.2.2无位置传感器PMBDCM的硬件起动 (29)4.3无位置传感器PMBDCM的控制系统软件设计 (30)4.3.1转子零初始位置起动程序 (30)4.3.2“反电势”法运行程序 (32)4.3.3功率模块保护中断(PDPINT)服务程序 (33)4.4本章小结 (34)5 永磁无刷直流电动机无位置传感器控制系统的仿真 (35)5.1PMBDCM的数学模型 (35)5.2无位置传感器PMBDCM的建模和仿真 (36)5.2.1总体结构设计 (36)5.2.2双闭环调速系仿真结果 (37)6 总结与展望 (40)参考文献 (41)致谢 (42)精美文档天津科技大学2011级本科毕业设计精美文档1 绪论永磁无刷直流电动机 ( 以下简称 PMBDCM ) 是近年来随着信息技术和材料技术的发展而迅速发展起来的一种性能优秀的新型电动机。
永磁同步电机以及直流无刷电机的电磁设计
其中 D 为电枢直径;
l e f 为等效铁心长度;
(2)相同的电磁负荷, 相同转速,电机体积越大
n 为电机的额定点转速; P ' 为电机的计算功率; 可实现的功率也越大;
' p
为电机计算极弧系数;
K n m 为电机气隙磁场的波形系数; K d p 为电机的绕组系数; A 为电机的线负荷;
电流矢量应满 足的两条件
T em / is
id
0
T em / is
iq
0
IPM
Tem
Is
3p[miq(LdLq)idiq]
2 id2iq2
电
id
m
m 2 412L2dL2q 21Ld
id
0
T em / is
iq
0
Tem
Is
3p[miq(LdLq)idiq]
2 id2iq2
SPM
表贴式永磁电机: Ld=Lq
电 机
可推出结论:Id=0
SPM电机的定子电流矢量轨迹
13
4.2 最大转矩/电流控制
最大转矩/电流控制也称单位电流输出最大转矩的控制,是凸极式永磁同步电动 机用的较多的一种电流控制策略。对于隐极式永磁同步电机(大多数表贴式永磁电 机)来说,最大转矩/电流控制就是id=0控制。
磁场定向控制时的相量图
12
4.2 最大转矩/电流控制
最大转矩/电流控制也称单位电流输出最大转矩的控制,是凸极式永磁同步电动 机用的较多的一种电流控制策略。对于隐极式永磁同步电机(大多数表贴式永磁电 机)来说,最大转矩/电流控制就是id=0控制。
轮毂式永磁无刷直流电动机设计浅析
要 减速机 构, 不仅使驱 动系统 结构简单 、 紧凑,
轴 向尺 寸也 减 小 , 而且 效 率 进 一 步 提 高 , 具 备低 速 大 扭 矩特 性 【 卜 引 。 本 文 介绍 了一台应 用于 直接 驱 动 电动摩托 车
n e t b r u s h l e s s mo t o r a s r e s e a r c h i n g s u b j e c t , d e s i g n o f t h e
ZH ANG Xi aoF u
J i a n gme n Po l y t e c hn i c
摘
要: 以外 转子 永磁 无刷 直流 电机 为研 究对 象 ,
点, 近 年得 到超常发 展 。 轮 毂 电机 驱 动 系统 是
一
分析 了绕 组 没计 、 槽 极数 合理 选择 和 磁钢 优化 等。 并 应 用Ma x we l l 2 D 软件 , 对轮 毂式 永磁无刷 直流 电机进行 设
限元 分析的结果 不仅 验证 了电机设 计的合 理性 , 还 为 电
机的优化 设计提供了依据 。
关键词 : 轮毂 电机 电动摩托 车 有限元
外转 子
永磁无 刷直流 电机
主要 有直接驱动式 和带轮 边减速 器电动轮两种
形式 。 直 接 驱 动 式 电机 多采 用外 转 子 , 由于 不需
wi n d i n g s , p r o p e r s e l e c t i o n o f t h e s l o t / p o l e n u mb e r a n d o p t i — mi z a t i o n o f t h e ma g n e t i c ma t e r i a l s we r e a n a l y z e d . T h e DC o u t e r - r o t o r p e r ma n e n t ma g n e t b r u s h l e s s mo t o r wa s d e s i g n e d b y me a n s o f t h e s o f t wa r e o f Ma x we l l 2 D, wo r k i n g o u t t h e a i r - g a p ma g n e t i c f l u x d e n s i t y , EM F wa v e f o r m a n d e l e c — t r o ma g n e t i c t o r q u e d i a g r a m. Th e r e s u l t s o f f i n i t e e l e me n t
永磁直流无刷电机实用设计及应用技术

永磁直流无刷电机实用设计及应用技术1. 引言1.1 概述随着科技的不断发展,无刷电机在各个领域的应用越来越广泛。
其中,永磁直流无刷电机作为一种重要的驱动装置,在电动汽车、工业自动化设备和家用电器等领域中扮演着重要角色。
本文将对永磁直流无刷电机进行实用设计及应用技术的全面探讨,旨在帮助读者更好地理解并应用该技术。
1.2 文章结构本文分为五个主要部分:引言、永磁直流无刷电机的原理和特点、实用设计技术、应用案例分析以及结论与展望。
通过这些内容,我们将全面介绍永磁直流无刷电机及其相关技术的基本原理、实际应用过程中需要考虑的设计参数,以及一些常见的应用案例。
最后,我们将总结研究成果,并探讨未来该领域的发展趋势和前景。
1.3 目的本文的主要目的是介绍永磁直流无刷电机实用设计及其应用技术,从而使读者能够了解和掌握这一重要领域的知识。
通过深入研究各种设计和优化技术,我们可以更好地理解电动汽车、工业自动化设备和家用电器等领域中永磁直流无刷电机的应用,并为实际工程设计提供参考和指导。
同时,本文也旨在为未来的研究和创新提供一定的启示,并展望该领域的发展趋势。
2. 永磁直流无刷电机的原理和特点:2.1 原理介绍:永磁直流无刷电机是一种利用永磁体产生磁场,通过电子器件控制换相的电机。
其工作原理基于法拉第感应定律和洛伦兹力定律。
在该电机中,通过转子上的永磁体所产生的磁场与由驱动器产生的旋转磁场进行交互作用,从而实现电机运转。
2.2 特点分析:永磁直流无刷电机具有以下几个特点:(1)高效率:相比传统直流有刷电机,无刷电机采用固态换向器件,减少了刷子摩擦损耗和碳粉污染等问题,因此具有较高的效率。
(2)低维护成本:无刷电机没有刷子和换向环境等易损部件,从而降低了维护成本,并延长了使用寿命。
(3)快速响应能力:无刷电机具有较高的动态响应能力,并且可以通过调整驱动器参数来实现不同的控制策略,以满足不同工况下的要求。
(4)高功率密度:由于无刷电机采用了永磁体产生较强磁场,而且没有绕组饱和现象,因此具有较高的功率密度。
毕业论文--无刷直流电动机控制系统设计方案

无刷直流电动机控制系统设计方案摘要无刷直流电动机是在有刷直流电动机的基础上发展起来的。
现阶段,虽然各种交流电动机和直流电动机在传动应用中占主导地位,但无刷直流电动机正受到普遍的关注。
自20世纪90年代以来,随着人们生活水平的提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都越来越趋向于高效率化、小型化及高智能化,作为执行元件的重要组成部分,电机必须具有精度高、速度快、效率高等特点,无刷直流电机的应用也因此而迅速增长。
本设计是把无刷直流电动机作为电动自行车控制系统的驱动电机,以PIC16F72单片机为控制电路,单片机采集比较电平及电机霍尔反馈信号,通过软件编程控制无刷直流电动机。
关键词无刷直流电动机单片机霍尔位置传感器AbstractBrushless DC motor in a brush DC motor developed on the basis of. At this stage, although exchanges of all kinds of DC motors and motor drive in the application of the dominant, but brushless DC motor is under common concern。
Since the 1990s,as people's living standards improve and modernize production, the development of office automation, household appliances, industrial robots and other equipment are increasingly tend to be high efficiency,small size and high intelligence, as the implementation of components An important component of the motor must have a high accuracy, speed, high efficiency, brushless DC motor and therefore the application is also growing rapidly.This design is the brushless DC motor as the electric bicycle motor—driven control system, PIC16F72 microcontroller for control circuit, SCM collection and comparison—level electrical signal Hall feedback, software programming through brushless DC motor control . Key words bldcm the single chip processor hall position sensor 摘要 (I)Abstract (II)第1章概述 (1)1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平均值即可得到电机的空载平均气隙磁密为 0. 63 T, 再利用路算求空载工作点的方法尝试取不同的漏磁 系数求对应的空载气隙磁密, 直到磁密达到 0. 63 T 为止,最后反推得到漏磁系数为 1. 13 , 由此再向下 进行磁路计算, 达到了用场算结果校正路算结果的 目的。
图3
气隙磁密波形
4
磁路设计
磁路设计是要求出永磁体的外磁路特性, 并作
过研究发现,随着极对数的增加: 定转子轭部用铁量 和绕组用铜量减少,引起成本相应减小; 铁心磁场交 变频率增高,铁耗增加比较明显; 导线电流密度随极 数的增加略有降低,定子绕组中的铜耗减小; 功率器 件的开关次数增多,开关损耗略有增加; 转速和体积 不变,机械损耗基本不变,电动机的总损耗随极数的 增加而增加,电机效率降低。考虑到电动驱动系统用 无刷直流电动机在效率及电机发热上的要求,因此, 最终确定两对极方案为最佳方案。
3
有限元分析
本文利用有限元法计算了电机电磁设计的一个
关键参数: 漏磁系数, 以此再向下进行磁路计算。 按照几何模型的创建、 设定物理属性、 剖分划分网 格、求解、后处理的步骤构建了无刷直流电动机的 二维有限元模型,如图 2 所示。
0
引
言
高效电动推进系统是高空动力推进系统的发展 方向,这种电动驱动系统采用电池供电, 通过电机 驱动空气螺旋桨, 不仅需要有更好的性能、 更高的 可靠性及更小的体积, 而且由于电源能量有限, 因 此要求系统有更高的效率,以降低系统对电源容量、 逆变器容量以及空间散热条件的要求, 从而提高系 统的有效载荷,增加其续航能力
2
2. 1
结构设计
主要尺寸确定 在永磁无刷直流电动机中,主要尺寸( 电枢内径
和铁心长) 、电动机的计算容量和电磁负荷之间存在 着如下关系: D2 i1 l i = 6. 1 P'i α i AB δ n N ( 1)
式中,D i1 为电枢内径, l i 为电枢铁心长, A 为电机 线负荷, B δ 为 电 机 气 隙 磁 密, α i 为 永 磁 体 极 弧 系
收稿日期: 2012 08 01 ; 修回日期: 2013 01 04 基金项目: 西安建筑科技大学学科建设重点培育计划专项资金建设项目( XK201223 ) 。 作者简介: 赵南南( 1983 ) ,男,博士,讲师,研究方向为永磁无刷电机设计理论与 CAD 技术。 刘卫国( 1960 ) ,男,教授,博士生导师,研究方向为运动控制,电气伺服控制、电机控制技术的应用与研究 。
程。针对本文设计的永磁无刷直流电动机, 综合考 虑电机 的 重 量 和 效 率, 长 径 比 取 1 。 由 以 上 分 析, 可以得出电机的电枢内径和铁心长为 9. 8 cm。 2. 2 定转子设计 ( 1 ) 永磁体及铁心材料的选择 当前常用的永磁材料主要有钐钴永磁材料和钕 铁硼永磁材料, 钕铁硼永磁材料相比钐钴永磁材料 具有更高的磁特性, 但是工作温度较低, 温度稳定 性稍差。针对本文所研究的高空电动推进系统用永 磁无刷直流电动机,永磁材料选用耐高温的 NSC27G 钐钴永磁材料,其剩余磁感应强度为 9760G,磁钢的 矫顽力 6724Oe。 按永磁体放置位置的不同, 电机转子可以分为 表贴式结构和内嵌式结构, 内嵌式结构永磁体的放 置方式多种多样, 可以根据需要进行灵活的选择得 到不同的磁路结构形式。 表贴式结构最常用的是瓦 形径向充磁方式, 由于永磁体的取向性好, 可以方 便地获得具有较好方波形状的气隙磁场, 与 120° 导
DOI:10.15934/ki.micromotors.2013.07.008
第 46 卷 2013 年
第7 期 7月
M ICROM OTORS
Vol. 46. No. 7 Jul. 2013
电动推进系统用永磁无刷直流电动机设计分析
1 2 赵南南 ,刘卫国
( 1. 西安建筑科技大学,西安 710055 ; 2. 西北工业大学,西安 710072 ) 摘 要: 针对电动推进系统用永磁无刷直流电动机进行了设计研究,利用场和路结合的方法分析了电机的结构 、 磁
· 28 · 的计算方法。
46 卷
数,p'i 为计算功率, n N 为电机额定转速。 从式 ( 1 ) 可以看出: 较高的电机电磁负荷可以减小电机体积 , 增加电机的功率密度。 但电磁负荷也不宜都选得太 高,太高电机铜耗、 铁耗会相应增加, 引起电机效 率降低。综合考虑预取线负荷 100 A / cm, 预取气隙 磁密 7 000 G。 长径比是电机电枢铁心长度与电枢内径之比 , 它的大小与电机性能、 成本、 重量等有密切关系。 一般情况下,无刷直流电动机的长径比取 0. 4 ~ 2 之 间。电机细长, 转子的转动惯量较小; 绕组端部变 短,用铜量相应减少; 但是也引起电机的和散热条 件和机械强度相对变差。 通过研究发现, 随着长径 比的增加,电机的效率普遍有一个逐渐增大再降低 的过程,而电机的质量有一个逐渐减小再增加的过
路和电路设计、计算了电机的电磁场分布 、损耗和温升,并通过实验验证了电机的温度场分析结果 。 其分析过程对 于提高无刷直流电动机的设计精度具有一定参考作用 。 关键词: 电动推进系统; 永磁无刷直流; 损耗; 发热 中图分类号: TM36 + 1 文献标志码: A 文章编号: 1001-6848 ( 2013 ) 07-0027-05
额定功率 / W 额定电压 DC / V 额定转速 / r·min 工作模式
8000 方波驱动、连续运行
图1
设计分析流程
通型三相逆变器匹配以实现方波电动机。 方波电动 机结构简单, 输出转矩大, 调速方便, 本文采用的 是瓦形径向充磁表贴式结构。 磁钢磁化方向厚度为 永磁体的一个重要尺寸,决定了电机的性能和成本, 本文通过优化设计, 得到了使电机气隙磁密达到饱 和的最小磁钢磁化方向厚度为 1 cm。 对永磁无刷直流电动机来说, 铁损耗主要集中 在定子铁心上, 定子一般采用硅钢片叠加而成, 在 设计电机时, 当电机在额定工作点时, 硅钢片中磁 感应强度值在磁化曲线临界饱和点附近, 以达到充 分利用材料的目的。 为使定子轭部材料充分利用, 设计中定子导磁材料选用低损耗中频冷轧硅钢片
永磁体工作图, 求出工作点的气隙磁感应强度和磁 通量。首先通过计算空载特性曲线 ( 曲线 1 ) 和永磁 体去磁曲线的交点, 即可得出电机的空载工作点, 如图 4 所 示。 通 过 求 解, 空 载 气 隙 磁 感 应 强 度 为 0. 6351 T,空载气隙磁通为 0. 00374 Wb。 空载特性 “额定工作时每极最大去磁磁势 ” 曲线向左平移 得到 曲线 2 - 负载特性曲线, 其与永磁体去磁曲线的交 “起动时每极直轴电枢 点即为负载工作点; 向左平移 ,得到曲线 3 - 启动特性曲线, 其与永 反应最大值” 磁体去磁曲线的交点即为启动工作点 。
7期
赵南南等: 电动推进系统用永磁无刷直流电动机设计分析
· 29 ·
DW465 - 50 ,这种材料导磁率高, 饱和磁感应强度 高,磁损耗小, 可以将定子的齿和轭做得较窄, 既 减少了铁损,又减小电机体积,降低电机重量。 ( 2 ) 槽数、槽型和极对数的选择 当电机尺寸固定时,槽数的多少决定绕线匝数的 数量,加工制造上的难度,铁心饱和的程度以及对转 矩的影响,槽数越多,可以降低气隙磁阻的不均匀程 度,减小由此产生的转矩脉动。本文选定电机定子为 36 槽。选择槽型时,主要要保证齿部、 轭部的均匀 性,从而使磁密分布均匀。开口底半梨形槽能够使齿 部、轭部分别较均匀,同时能够获得较大的净槽面 积。因此,本文设计的电机采用开口底半梨形槽。 无刷直流电动机极对数的选取与多方面的因素有 关,涉及到损耗、效率、 转速、 功率、 成本等因素, 设计电机时,应综合考虑运行性能和经济指标选择极 数。作者在前期工作中分析了规定的性能指标及主要
Design Analysis of Permanent Magnet Brushless DC Motor of Electric Propulsion System
ZHAO Nannan1 ,LIU Weiguo2 ( 1 . Xi'an University of Architecture and Technology,Xi'an 710055 ,China; 2 . Northwestern Polytechnical University,Xi'an 710072 ,China) Abstract: In this paper,the design process of permanent magnet brushless DC motor of electric propulsion system was researched using the method combining field and circuit. The configuration,magnetic circuit and electric circuit were designed,and the electromagnetic field distribution,losses and temperature rise were calculated. The thermal field analysis was validated by the experiment data. The design process presented in this paper is useful for improving the design precision of brushless DC Motor. Key words: electric propulsion system; permanent magnet brushless DC ; losses; thermal 轻、可靠性高、 特性好、 调速方便、 结构简单等一 系列优点。所以, 由该电机带动螺旋桨所组成的电 动推进系统是理想的选择。 由于能源的有限性以及对体积重量的要求, 电 动推进系统用永磁无刷直流电动机的电磁负荷需要 设计的相对较高, 因此内部电磁场分布较为复杂。 推进电机在电磁转换转换过程中不可避免地要产生 损耗,这些损耗最终绝大部分变成热量, 由于高空 大气稀薄,空气对流传输热量的能力比较差, 导致 系统散热条件差。 如果电机在单位时间内散发出的 热量小于所产生的热量,使得热量积累越来越大时, 就会引起局部或整个电机温度升高。 因此, 推进电 机的磁路及电路设计、 电磁场分析、 损耗和温度场 的计算成为提高高空电动推进系统效率和可靠性的 前提和关键。本文利用场和路结合的方法分析了电 机的结构、磁路和电路设计、 计算了电机的电磁场 分布、损耗和温升, 并通过实验验证了损耗和温升