一种步行机器人的机械机构设计研究
小型行走机构设计与制作 动点
小型行走机构设计与制作动点在现代科技发展迅速的时代,各种机器人设备已经在生活和工作中得到广泛应用。
其中,小型行走机构作为一种具有灵活性和多功能性的机器人,被广泛应用于教育、医疗、娱乐等领域。
本文将探讨小型行走机构的设计与制作过程,以及其在日常生活中的应用。
小型行走机构的设计是整个制作过程中的关键环节。
设计师需要考虑机器人的功能需求、结构设计、材料选择等因素。
在确定机器人功能需求的基础上,设计师可以选择合适的传感器、执行器和控制系统,以实现机器人的行走、导航和避障功能。
同时,结构设计也至关重要,设计师需要考虑机器人的重心平衡、稳定性和结构强度,确保机器人可以稳定地行走和承受外部环境的影响。
此外,材料选择也是设计过程中需要重点考虑的因素,设计师需要选择轻巧耐用的材料,以确保机器人的整体性能和使用寿命。
制作小型行走机构需要进行多个步骤的工艺制造。
首先是机械结构的加工与装配,设计师需要根据设计图纸进行机械结构的加工,包括零部件的切割、冲压、焊接等工艺。
然后是电气系统的搭建,设计师需要按照电路图进行电气元件的布线、连接和测试,确保电气系统正常运行。
最后是控制系统的编程与调试,设计师需要编写控制程序,进行控制系统的调试和优化,以确保机器人可以按照预定的路径和方式进行行走和操作。
小型行走机构在日常生活中有着广泛的应用价值。
在教育领域,小型行走机构可以作为教学工具,帮助学生学习机器人技术和编程知识,培养学生的动手能力和创新思维。
在医疗领域,小型行走机构可以用于康复训练和辅助治疗,帮助患者恢复步态功能和日常生活能力。
在娱乐领域,小型行走机构可以作为娱乐设备,为人们提供娱乐和休闲的方式,丰富人们的生活和娱乐体验。
小型行走机构的设计与制作是一个综合性的工程项目,需要设计师在功能需求、结构设计和材料选择等方面进行充分考虑,以确保机器人的性能和稳定性。
小型行走机构在日常生活中有着广泛的应用前景,可以为教育、医疗、娱乐等领域带来便利和创新,为人们提供更加丰富多彩的生活体验。
毕业设计(论文)机器人行走机构 文献综述
重庆理工大学毕业设计(论文)文献综述题目机器人行走机构设计二级学院重庆汽车学院专业机械设计制造及其自动化班级姓名学号指导教师系主任时间评阅老师签字:机器人行走机构吴俊摘要:行走机器人是机器人学中的一个重要分支。
行走机构可以是轮式的、履带式的和腿式的等,能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构。
本文从国内外的研究状况着手,介绍了行走机器人的发展历史,研究现状和发展趋势。
本文还介绍了国内最新的研究成果。
关键字:机器人行走机构发展现状应用Keyword:robot travelling mechanism developing current situation application一,前言行走机器人是机器人学中的一个重要分支。
关于行走机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式的和腿式的等;其次,必须考虑驱动器的控制,以使机器人达到期望的行为;第三,必须考虑导航或路径规划。
因此,行走机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统。
机器人的机械结构形式的选型和设计,应该根据实际需要进行。
在机器人机构方面,应当结合机器人在各个领域及各种场合的应用,开展丰富而富有创造性的工作。
对于行走机器人,研究能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构。
当前,对足式步行机器人、履带式和特种机器人研究较多,但大多数仍处于实验阶段,而轮式移动机器人由于其控制简单,运动稳定和能源利用率高等特点,正在向实用化迅速发展,从阿波罗登月计划中的月球车到美国最近推出的NASA 行星漫游计划中的六轮采样车,从西方各国正在加紧研制的战场巡逻机器人、侦察车到新近研制的管道清洗检测机器人,都有力地显示出行走机器人正在以其使用价值和广阔的应用前景而成为智能机器人发展的方向之一。
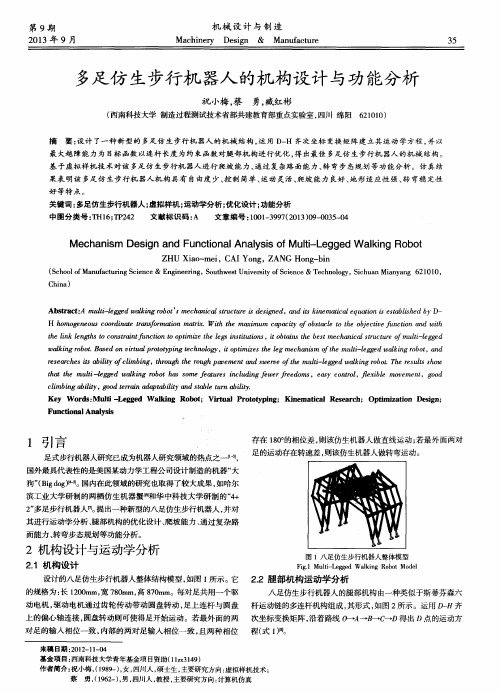
二、课题国内外现状多足步行机器人是一种具有冗余驱动、多支链、时变拓扑运动机构, 是模仿多足动物运动形式的特种机器人, 是一种足式移动机构。
双足仿生机器人行走机构设计

双足仿生机器人行走机构设计
双足仿生机器人行走机构设计一般包括以下几个关键部分:
1. 足底结构:足底结构是机器人与地面接触的部分,需要具备良好的稳定性和抓地力。
一般采用橡胶材料制作,设计有凹凸纹路或者类似动物脚掌的结构,以增加摩擦力和抓地力。
2. 关节设计:双足仿生机器人的每个腿部都需要多个关节来实现自由运动。
关节设计需要考虑到机器人的稳定性和灵活性,一般采用电机驱动的旋转关节或者液压/气动驱动的线性关节。
3. 动力系统:机器人行走需要动力系统提供能量。
一般采用电池或者电源供电,驱动关节的电机需要具备足够的扭矩和速度来实现机器人的行走。
4. 传感器:为了实现机器人的平衡和姿态控制,需要配备各种传感器。
例如,陀螺仪和加速度计可以用来检测机器人的倾斜角度,力传感器可以用来感知地面反作用力,视觉传感器可以用来感知周围环境。
5. 控制系统:双足仿生机器人的行走需要一个高效的控制系统。
控制系统可以根据传感器的反馈信息,实时调整关节的运动,以保持机器人的平衡和稳定。
总体来说,双足仿生机器人行走机构设计需要考虑到稳定性、灵活性、能量效率和控制系统的要求。
具体的设计方案需要根据机器人的应用场景和需求来确定。
多足机器人行走机构设计(论文)

高职学生毕业设计题目:多足机器人行走机构设计学院: 机械自动化学院专业:学号:学生姓名:指导教师:日期:摘要本文旨在设计一种能够实现灵活、全方位运动的机器人的行走机构。
本文设计的多足步行机器人具有冗余驱动、运动拓扑的特点。
为实现其步行全方位机动性及作业多功能性,需要解决一系列的技术问题,而结构设计是其中的关键。
首先,对于国内外机器人的发展现状进行阐述和比较,并分析了多足机器人的研究趋势;接着,从机构自由度入手,明确设计思路,确定行走机构结构,对主要零件、构件进行设计,分析机构的受力情况,找出较危险的零件,并对其强度进行校核。
最后,初步研究了机器人的行动方式,拟定了简单的步态规划方案,规划了机器人直线行走步态、定点转弯步态。
关键词:多足机器人;机构自由度;行走机构;机构设计AbstractThis paper aims to design a travelling mechanism of a flexible and omnibearing motorial robot. The multiped walking robot referred to this paper has the characteristics of redandant drive and topological motion. In order to achieve its omnibearing walking mobility and working polyfunctionality, a series of technique questions need to resolved, of which the structural design is the key point.Firstly, the paper states the current situation of the robots development and compares the differences of the robots both domestic and overseas. Moreover ,it analyses the research trend of multiped robots. Secondly, it make clear of the designing ideas and confirm the travelling mechanism in terms of the structural variance,as well as designing the major parts and constuctional elements. Besides ,it analyses the stress state of the mechanism,trying to find out the rather dangerous parts and checking their intensity. Finally, it initially research the walking patterns of the robots and make out a simple tread program, which plans out the robot tread of linear walking and fixed point swerving.Keyword:Multiped robot;Degree of freedom;travelling mechanism;Mechanical design目录第一章绪论 (1)1.1 引言 (1)1.2国内外多足机器人发展概况 (1)1.3 多足机器人研究发展趋势 (3)第二章多足机器人行走机构的设计及校核 (5)2.1 多足机器人行走机构结构的拟定 (5)2.2 重要组件的设计及校核 (6)2.2.1 重要组件的选定 (6)2.2.2 圆柱凸轮的设计 (7)2.2.3 凸轮滚子轴的强度校核 (7)第三章其它部分设计 (9)3.1 电机和减速器的选用 (9)3.2 机器人步态初步规划 (9)设计总结 (11)参考文献 (12)致谢 (13)第一章绪论1.1 引言步行机器人是模仿动物的运动形式,采用腿式结构来完成多种移动功能的一类特种机起人。
小型行走机构设计与制作 子列

小型行走机构设计与制作一、引言随着科技的发展,机器人技术在各个领域得到了广泛应用。
小型行走机构作为一种常见的机器人类型,具有灵活性高、适应性强等特点,被广泛应用于救援、勘探等领域。
本文将从设计和制作的角度,深入探讨小型行走机构的相关内容。
二、小型行走机构设计要素2.1 动力系统小型行走机构的动力系统是机器人行走的核心,常见的动力系统包括电动机、液压驱动、气动驱动等。
在设计中需要考虑机器人的负载、速度和续航能力等因素,选择合适的动力系统。
2.2 结构设计小型行走机构的结构设计需要考虑机器人的稳定性、可靠性和适应性。
常见的结构设计包括四足、六足、轮式等。
根据具体应用场景和要求选择合适的结构设计。
2.3 控制系统小型行走机构的控制系统是机器人行走的关键,包括传感器、控制算法等。
传感器可以用于感知环境和机器人状态,控制算法可以实现机器人的自主行走和避障等功能。
2.4 材料选择小型行走机构的材料选择需要考虑机器人的重量、强度和耐用性等因素。
常见的材料包括金属、塑料、复合材料等。
根据具体要求选择合适的材料。
三、小型行走机构制作步骤3.1 设计草图在制作小型行走机构之前,首先需要进行设计草图的绘制。
设计草图可以帮助我们明确机器人的外形和结构,为后续的制作提供指导。
3.2 零部件加工根据设计草图,我们需要进行零部件的加工。
零部件加工可以使用机械加工、3D 打印等方式,根据具体材料和要求选择合适的加工方法。
3.3 组装调试零部件加工完成后,我们需要进行组装调试。
组装调试包括将各个零部件按照设计要求进行组装,并进行相关调试工作,确保机器人的正常运行。
3.4 动力系统安装组装调试完成后,我们需要进行动力系统的安装。
根据选择的动力系统,将其安装到机器人的合适位置,并进行相应的接线工作。
3.5 控制系统集成最后,我们需要进行控制系统的集成。
将传感器和控制算法等集成到机器人中,实现机器人的自主行走和其他功能。
四、小型行走机构应用案例4.1 救援机器人小型行走机构可以应用于救援领域,通过自主行走和避障功能,实现对灾区的勘探和救援工作,提高救援效率和安全性。
四足步行机器人结构设计分析

四足步行机器人结构设计分析四足步行机器人是一种模仿动物四肢行走方式的机械装置,在近年来得到了广泛的关注和研究。
四足步行机器人的结构设计是其性能表现的关键,本文将针对四足步行机器人的结构设计进行分析和讨论。
一、四足步行机器人的基本结构四足步行机器人通常由机械结构、传动系统、传感器系统和控制系统四个部分组成。
1. 机械结构:四足步行机器人的机械结构是其最基本的组成部分,也是承载整个机器人重量和提供运动支撑的关键。
一般来说,四足步行机器人的机械结构应具备良好的稳定性、强度和刚度,以保证机器人在行走过程中能够稳定地支撑自身重量,并克服外部环境的摩擦力和阻力。
2. 传动系统:四足步行机器人的传动系统用于实现机器人四肢的运动控制,一般采用电机和液压缸等执行机构作为驱动装置,并通过传动装置将动力传递到机器人的四肢上。
传动系统的设计应保证机器人在行走过程中能够实现灵活的步态控制和高效的动力传递,以提高机器人的运动性能和适应性。
3. 传感器系统:四足步行机器人的传感器系统用于获取机器人周围环境的信息,并将其反馈到控制系统中进行处理和分析。
常用的传感器包括摄像头、激光雷达、惯性测量单元等,用于实现机器人的环境感知和自主导航能力。
4. 控制系统:四足步行机器人的控制系统用于实现对机器人运动和姿态的精确控制,一般包括运动控制、姿态控制和步态规划等功能。
控制系统的设计应保证机器人能够实现稳定、高效的步行运动,并具备一定的自主导航和应急反应能力。
二、四足步行机器人的结构设计要点1. 机械结构设计要点(1)结构设计要具备足够的稳定性和刚度,以支撑机器人的重量和提供稳定的运动平台。
(2)结构设计要符合机器人的运动特性和应用环境,以保证机器人在各种复杂地形下能够稳定行走。
(3)结构设计要考虑机器人的组装和维护便捷性,以提高机器人的可靠性和可维护性。
2. 传动系统设计要点(1)传动系统设计要具备高效的动力传递和快速的响应性能,以实现机器人的灵活运动控制。
四足步行机器人结构设计分析

四足步行机器人结构设计分析四足步行机器人是一种模拟动物四肢步行方式的机器人。
它具有良好的适地性和灵活性,可以应用于各种复杂环境中,例如救援、探索、农业等。
四足步行机器人的结构设计是实现其步行运动和完成任务的关键。
1. 机械结构设计:四足步行机器人的机械结构主要包括机身、四肢、关节和传动系统等部分。
机身的设计应考虑到重心的稳定性和机器人的整体刚性,一般采用轻质材料和合理的结构布局。
四肢的设计应具有足够的力量和灵活性,能够适应不同地形和姿势的需求。
关节的设计应具有足够的承载能力和运动范围,一般采用旋转关节和伸缩关节等。
传动系统的设计应考虑到传动效率和可靠性,一般采用电机驱动和齿轮传动等。
2. 控制系统设计:四足步行机器人的控制系统主要包括感知、决策和执行三个层次。
感知的设计应采用多种传感器,如摄像头、激光雷达、陀螺仪等,用于获取周围环境的信息。
决策的设计应基于感知信息和任务要求,通过算法和模型计算出合理的运动策略和路径规划。
执行的设计应将决策结果转化为相应的机器人动作,控制四肢的运动和保持平衡。
3. 动力系统设计:四足步行机器人的动力系统主要包括电源和驱动器。
电源的设计应提供稳定和持久的电能供应,一般采用电池或者燃料电池等。
驱动器的设计应根据机器人的重量和动作需求选择适当的电机和控制器,一般采用无刷直流电机和腿部驱动器等。
4. 结构分析:为了实现高效、稳定、灵活的步行运动,四足步行机器人的结构应进行结构分析。
通过有限元分析等工具,分析机器人在不同工况下的受力和变形情况,优化机械结构。
还应考虑到机器人的自重、荷载和动作过程中的冲击和振动等因素,进行合理设计和选材。
5. 运动学和动力学分析:为了保证步行机器人的运动稳定性和效率,需要进行运动学和动力学分析。
运动学分析可以确定机器人的运动轨迹和姿态,动力学分析可以计算出机器人的受力和力矩。
通过分析得到的结果,可以对机器人的运动控制和力量调节进行优化和改进。
多足仿生步行机器人的机构设计与功能分析
第 9期
2 0 1 3年 9月
机 械 设 计 与 制 造
Ma c h i n e r y De s i g n & Ma n u f a c t u r e 3 5
多足仿 生步行机 器人 的机 构设计 与功 能分析
祝 小梅 , 蔡 勇, 臧 红彬
6 2 1 0 1 0 ) ( 西南科技 大学 制造过程测试技术省部共建教育部重点实验室 , 四川 绵阳
r e s e a r c h e s i t s a b i l i t y fc o l i mb i n g , t h r o u g h t h e r o u g h p a v e en m t a n d s w e we ft o h e m u h i - l e g g e d w a l k i n g r o b o t . T h e r e s u h s s h o w
中 图分 类 号 : T H1 6 ; T P 2 4 2 文献标识码 : A 文章 编 号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 3 ) 0 9 — 0 0 3 5 — 0 4
Me c h a n i s m De s i g n a n d F u n c t i o n a l An a l y s i s o f Mu l t i - L e g g e d Wa l k i n g Ro b o t
本科毕业论文---四足步行机器人腿的机构设计(论文)设计
毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of design concepts and approach to the design of walking and the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords:SolidWorks; four-legged walking robot目录摘要 (I)Abstract (II)1 绪论 (1)1.1 步行机器人的概述 (1)1.2 步行机器人研发现状 (1)1.3 存在的问题 (5)2 四足机器人腿的研究 (6)2.1 腿的对比分析 (6)2.1.1 开环关节连杆机构 (6)2.1.2 闭环平面四杆机构 (9)2.2 腿的设计 (11)2.2.1 腿的机构分析 (12)2.2.2 支撑与摆动组合协调控制器 (18)2.3 单条腿尺寸优化 (21)2.3.1 数学建模 (21)2.3.2 运动特征的分析 (23)2.4 机器人腿足端的轨迹和运动分析 (24)2.4.1 机器人腿足端的轨迹分析 (24)2.4.2 机器人腿足端的运动分析 (27)3 机体设计 (30)3.1 机体设计 (30)3.1.1 机体外壳设计 (30)3.1.2 传动系统设计 (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 (36)4.1 论文完成的主要工作 (36)4.2 总结 (36)参考文献 (37)致谢 (39)1绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
机械毕业设计1107步行式机器人结构设计
机械毕业设计1107步行式机器人结构设计引言步行式机器人是一种能够模仿人类行走方式的机器设备,具有广泛的应用前景。
本文旨在设计一种步行式机器人的结构,以满足特定的功能需求。
本文将讨论机器人的主要组成部分、运动方式和结构设计。
机器人的主要组成部分步行式机器人的主要组成部分包括:1. 机械结构:包括机器人的身体框架、关节和传动系统等。
2. 传感器:用于感知环境和获取数据,如摄像头、激光雷达等。
3. 控制系统:用于控制机器人的运动和决策,包括硬件和软件部分。
机器人的运动方式步行式机器人可以采用不同的运动方式,如行走、爬行、跳跃等。
在本设计中,我们将采用行走作为主要的运动方式。
机器人的行走将通过控制关节和传动系统的运动来实现。
结构设计在机器人的结构设计中,我们需要考虑以下因素:1. 载重能力:机器人需要有足够的强度和稳定性来携带所需的载荷。
2. 灵活性:机器人的关节和传动系统需要设计成能够自由运动和适应不同地形的形态。
3. 节约能源:机器人的结构应该尽量减少能量消耗,以延长电池寿命。
4. 安全性:机器人的结构应该具备抗震性和防护性,以应对意外情况。
根据以上考虑,我们设计了如下的机器人结构:1. 身体框架:采用轻量化的材料,如铝合金,以提供强度和稳定性。
2. 关节设计:采用多自由度关节,以实现机器人的灵活运动。
3. 传动系统:采用高效的传动装置,如电机和减速器,以提供足够的驱动力。
4. 支撑结构:在机器人的脚部设计中,采用合适的支撑结构和接触材料,以适应不同地形并提供稳定性。
结论本文提出了一种步行式机器人的结构设计,包括主要组成部分、运动方式和结构设计。
该设计考虑了机器人的功能需求,如载重能力、灵活性、节约能源和安全性。
通过采用合适的材料和装置,并结合智能控制系统,我们可以设计出一种满足特定需求的步行式机器人。
参考文献[1] 张三,李四. 步行式机器人结构设计研究. 机械工程学报, 2020, 48(10): 123-135.。
四足步行机器人结构设计分析

四足步行机器人结构设计分析
四足步行机器人是一种仿生机器人,通过模仿动物的行走方式来实现稳定的步行动作。
它的结构设计对于机器人的步行稳定性、载重能力和适应性具有重要影响。
下面将从机械
结构、动力系统和控制系统三个方面对四足步行机器人的结构设计进行分析。
首先是机械结构。
四足步行机器人的机械结构包括机器人的身体结构和四肢结构。
机
器人的身体结构通常采用一个类似于动物的骨架结构,它由中央主体和四条相连的肢体组成。
这种结构能够提供足够的稳定性和承重能力,同时使机器人能够适应不同的地形和环境。
四肢结构通常采用类似于动物的骨骼结构,它由骨骼和关节组成,能够提供足够的力
量和灵活性,使机器人能够进行步行和奔跑等动作。
其次是动力系统。
四足步行机器人的动力系统是机器人进行步行动作的动力来源。
它
通常由电动机、传动机构和电源组成。
电动机负责提供足够的动力,传动机构负责将电动
机的转动传递到机器人的肢体上,电源负责提供电能。
动力系统的设计需要考虑机器人的
载重能力、速度和电池寿命等因素,确保机器人能够稳定地进行步行动作。
最后是控制系统。
四足步行机器人的控制系统是机器人进行步行动作的核心部分。
它
通常由传感器、控制器和执行器组成。
传感器负责感知环境和机器人的状态,控制器负责
根据传感器的反馈信息制定步行动作的策略,执行器负责执行控制器制定的动作。
控制系
统的设计需要考虑机器人的稳定性、动作的平滑性和机器人与环境的交互等因素,确保机
器人能够稳定地进行步行动作。
双足仿生机器人行走机构设计
双足仿生机器人行走机构设计1. 引言双足仿生机器人是一种模仿人类步行方式的机器人,其行走机构的设计是实现机器人自主行走的关键。
本文将介绍双足仿生机器人行走机构的设计原理、结构与控制方法。
2. 设计原理双足仿生机器人的行走机构设计基于人类步行的原理。
人类步行是一种交替进行的两足动作,每步分为摆动相和支撑相。
在摆动相中,一只脚离地,并向前摆动;在支撑相中,另一只脚着地支撑身体。
机器人的行走机构需要模拟这一过程,通过控制各关节的运动实现机器人的步行。
3. 结构设计双足仿生机器人的行走机构包括传感模块、控制模块和执行模块。
传感模块用于感知机器人身体姿态和环境信息,如倾斜角、步长和地面状态等。
控制模块根据传感器信号和预设的步态参数计算关节的运动轨迹和力矩控制信号。
执行模块根据控制模块的指令,控制各关节运动,实现机器人的步行。
具体的结构设计包括:3.1 关节设计双足仿生机器人的关节设计需要考虑力矩传输、运动范围和结构强度等因素。
一般采用电机驱动的关节设计,通过控制电机的转动角度和力矩,实现机器人的步行动作。
3.2 脚底设计机器人的脚底设计需要考虑地面的摩擦力、稳定性和抗震性等因素。
一般采用具有摩擦力的材料作为脚底,例如橡胶或塑料材料。
同时,在脚底设计中还可以添加传感器,用于感知地面的状态和表面特征。
3.3 稳定性设计双足仿生机器人的稳定性设计是保证机器人能够在不倒地的情况下行走。
稳定性设计包括重心的控制、姿态的调节和动态平衡控制等。
通过控制机器人的关节运动和重心转移,使机器人能够保持平衡并行走。
4. 控制方法双足仿生机器人的行走机构控制方法包括开环控制和闭环控制两种。
4.1 开环控制开环控制是指根据预设的步态参数,通过控制各关节的运动轨迹和力矩,实现机器人的步行。
开环控制简单但稳定性较差,容易受到外界干扰影响。
4.2 闭环控制闭环控制是根据传感器信号和控制模块的反馈信息,实时调整关节的运动轨迹和力矩,以实现更加稳定的步行。
新型四足步行机器人的腿机构设计

【 bt c】 o b i e ee lyi ot e o enwp s v l ehn a sut et A s at C m in t vr pc p s r t e as e e m cai r u , e r n g h s at a l u sf h i g c tc r h l
:S u tn e h i i eh em a t wsute bi s dcdt n h l cai i li s sn c at pco h n r u v u yeu ,e ee m hn m m ao r u d a t h i t e e tc ro o lr e h t g t t f e s
;
ds teq arp drb ts pi zd ei o h udu e o io t e . n g f o mi
Ke r sQu d u e akn o o; ita s lt n Sr cu a d s no gmeh ns ywod : a r p dw ligr b tV ru l i ai ; tu tr l ei f e c a i mu o g l m
中图分类 号 :H1 ,P4 文献标 识码 : T 2T 2 A 1日 1亩l 言 J吾
★来稿 E期 :0 9 0 — 1 t 2 0 — 5 0
.. -
需要在平整地面决速稳定行走, 且而贾具甘 自 而 露仕 瓮甩删 述侣疋 疋’ 门 而且需要具备 日 。 土兀臌崂咫甘 主完成跨越各种
gio erbts l nd A cri h ei aa eestes uai oo m dlids nd a t oo ipa e. codn t teds p rm tr, i l o rbt oe ei e tf h n go n g h m tn s g wt Gs toeadtemoe ip tnotes ta D MSA t d e sitnaddnmi , i U fwl n dls u it h ow r o A A . f r ddr tci n ya c h o h f ef ea er o s
四足步行机器人行走机构设计毕业设计

四足步行机器人行走机构设计毕业设计篇一:四足步行机器人腿的机构设计毕业论文毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of designconcepts and approach to the design of walking and (原文来自:小草范文网:四足步行机器人行走机构设计毕业设计)the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords: SolidWorks; four-legged walking robot 目录摘要 ................................................ ................................................... . (I)Abstract .......................................... ................................................... (II)1 绪论 ................................................ ................................................... .. (1)1.1 步行机器人的概述 ................................................ .. (1)1.2 步行机器人研发现状 ................................................ . (1)1.3 存在的问题 ................................................ .. (5)2 四足机器人腿的研究 ................................................ .. (6)2.1 腿的对比分析 ................................................ . (6)2.1.1 开环关节连杆机构 ................................................ (6)2.1.2 闭环平面四杆机构 ................................................ . (9)2.2 腿的设计 ................................................ (11)2.2.1 腿的机构分析 ................................................ (12)2.2.2 支撑与摆动组合协调控制器 ................................................ . (18)2.3 单条腿尺寸优化 ................................................ . (21)2.3.1 数学建模 ................................................ .. (21)2.3.2 运动特征的分析 ................................................ .. (23)2.4 机器人腿足端的轨迹和运动分析 ................................................ . (24)2.4.1 机器人腿足端的轨迹分析 ................................................ .. (24)2.4.2 机器人腿足端的运动分析 ................................................ .. (27)3 机体设计................................................. ................................................... . (30)3.1 机体设计 ................................................ (30)3.1.1 机体外壳设计 ................................................ (30)3.1.2 传动系统设计 ................................................ (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 ................................................ ................................................... (36)4.1 论文完成的主要工作 ................................................ .. (36)4.2 总结 ................................................ ................................................... .. 36参考文献 ................................................ ................................................... .. (37)致谢 ................................................ ................................................... (39)1 绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。
基于6dof并联机构的步行机器人 设计及控制研究
基于6dof并联机构的步行机器人设计及控制研究基于6自由度并联机构的步行机器人,作为一种新型机器人设计和控制方法,已经开始引起越来越多的关注。
这种机器人结构具有很大的灵活性和适应性,使其能够完成许多复杂的步行和运动任务。
本文将对基于6自由度并联机构的步行机器人进行深度评估,并探讨其设计和控制研究的内容。
一、6自由度并联机构的介绍6自由度并联机构由6个连杆以及若干个关节连接而成。
它可以提供6个独立的运动自由度,使得机器人能够在各个方向上实现高度的灵活性。
这种机构的运动学模型和动力学模型相对复杂,需要深入的研究和分析。
二、基于6自由度并联机构的步行机器人的设计1. 结构设计基于6自由度并联机构的步行机器人的结构设计关键在于确定连杆的长度和连接方式,以及关节的类型和参数。
结构设计要考虑到机器人的负载要求、工作空间需要以及运动灵活性等因素。
2. 运动学分析步行机器人的运动学分析是对机器人的姿态、位置和运动轨迹的研究。
通过对连杆和关节的运动学分析,可以确定步行机器人的运动学模型,为后续的控制研究奠定基础。
3. 动力学分析步行机器人的动力学分析是研究机器人在不同工作状态下的力学特性。
通过动力学分析,可以得出机器人的惯性矩阵、动力学模型以及力学特性指标,为控制算法的设计提供依据。
三、基于6自由度并联机构的步行机器人的控制研究1. 姿态控制步行机器人的姿态控制是保持机器人稳定运行的关键。
通过合理的控制策略,机器人可以在不同的地形和工作条件下保持稳定的姿态,同时具备高度的机动性和灵活性。
2. 步态规划和控制步行机器人的步态规划和控制是确保机器人能够平稳行走的关键。
在不同的任务和环境下,机器人需要根据实际情况做出相应的步态调整和控制策略,以保持良好的稳定性和适应性。
3. 动力学控制步行机器人的动力学控制是实现所需运动和力学特性的关键。
通过动力学控制策略,机器人可以实现自主平衡、高效行走和所需工作负载的优化控制。
四、个人观点和理解基于6自由度并联机构的步行机器人设计和控制研究是机器人领域的一个重要研究方向。
基于压缩空气的行走机器人运动机构设计研究
基于压缩空气的行走机器人运动机构设计研究随着人工智能和机器人技术的不断发展,行走机器人作为一种重要的机器人类型,被广泛应用在工业、服务以及军事领域。
而在行走机器人的设计和研究中,基于压缩空气的运动机构成为一个备受关注的领域。
1. 压缩空气在行走机器人中的应用压缩空气作为一种清洁、可再生的动力源,在行走机器人中有着广泛的应用。
它不仅可以提供高效的动力,还具备较大的力矩输出和快速响应的特点。
而基于压缩空气的运动机构,将空气压缩和释放作为驱动力源,实现行走机器人的运动。
2. 基于压缩空气的运动机构设计原理基于压缩空气的运动机构设计的关键是如何将空气的压缩和释放转化为机器人的运动。
一个常见的设计原理是利用压缩空气的压力差来驱动机器人的运动。
通过控制空气的压力变化,使得压缩空气推动机器人的活塞运动,从而带动机器人的行走。
3. 运动机构设计的关键技术在基于压缩空气的运动机构设计中,有几个关键技术需要解决。
首先是空气的压缩和释放控制技术,需要设计有效的压缩装置和阀门控制系统,以保证空气的稳定供应和控制。
其次是机器人的稳定性和平衡控制技术,由于压缩空气的压力变化会引起机器人的重心变化,需要设计相应的控制系统来维持机器人的平衡。
此外,还需要考虑机器人的能量回收技术,以提高压缩空气的利用效率。
4. 基于压缩空气的行走机器人实际应用基于压缩空气的行走机器人已经在一些实际应用中取得了成功。
例如,它可以被应用于地质勘探中的矿山和隧道探测,通过压缩空气的驱动实现在复杂地形中的行走和探测。
此外,它还可以被用于救援行动中的搜救任务,由于压缩空气的快速响应特性,可以在紧急情况下实现快速行走和搜寻。
5. 发展前景与挑战基于压缩空气的行走机器人作为一种新兴技术,其发展前景广阔,但也面临着一些挑战。
首先是控制系统的设计与优化,如何实现对压缩空气的精确控制,仍然是一个亟待解决的问题。
其次是能源的利用和环保性能,虽然压缩空气是一种可再生的能源,但如何提高其能量的回收利用率和减少压缩过程中的能量损失,仍然需要进一步的研究。
一种移动机器人行走机构系统设计方法与流程

一种移动机器人行走机构系统设计方法与流程本发明涉及一种机器人设计方法,具体涉及一种移动机器人行走机构系统设计方法,属于智能电子产品技术领域。
背景技术:在国内外的机器人行走机构选择中,具有代表性的主要有轮式、腿式、履带式等几种行走机构,其根据使用场合不同,又从3个轮到多个轮、多腿式、两条履带到多条履带不等,轮式移动机构可以达到较高的运动速度,轮式的效率最高,行进速度快,转向灵活,而且造价低廉,部件出现问题后更换迅速的特点,另外,在相对平坦的地面上,轮式移动既有相当理想的优势,控制也相对简单,轮式移动机构现今应用相当广泛,是目前研究最为透彻的移动机构之一,传统的轮式行走机构有三轮、四轮、六轮的机构形式,尤其六轮机构是目前广泛运用的越障型式,相对来说,轮式移动机构也有很大的缺点,就是针对路面的要求,由于与地面接触面积小,在土壤压比较小的柔软路面或者湿滑的路面上容易发生沉陷和打滑,这些都是轮式机构在大多数野外复杂环境下功能受到限制,为提高轮式行走机构的多地形适应能力及其通过性,在传统的轮式行走机构上进行结构变形,出现了四轮加前后摆、六轮加前后摆、行星轮式等具有多地形适应能力的行走机构,早期的机器人对路况要求不高,因此轮式的优点被充分发挥出来,在城市的普通路面环境下,轮式机构确实是最为符合的机器人行进机构,但其缺点也是很明显的,就是对平整地形的依赖过高,适应能力低下,特别是在特殊路面的情况下,苛刻条件如爬梯、爬坡等,轮式都无法胜任。
技术实现要素:(一)要解决的技术问题为解决上述问题,本发明提出了一种移动机器人行走机构系统设计方法,采用四曲柄连杆履带机构,在机构可靠性,运动特性及造价方面具有明显的优势,另外,将履带式、腿式及其曲柄结构结合在一起更加增强了移动机器人的越障能力。
(二)技术方案本发明的移动机器人行走机构系统设计方法,包括以下步骤:第一步:通过对国内外移动机器人行走机构的研究分析,提出了可以满足具有特殊作业功能的机器人行走机构移动平台的总体设计要求和设计指标要求;第二步:提出一种新型的机器人行走机构,保证其在爬坡、跨越壕沟、高台等非结构化环境下具有较强的越障能力,所设计的机器人行走机构结合了轮式、腿式和履带式结构优点,既能够保持相对较快的运行速度,又具有灵活的变形能力改变履带的形状,大大提高了行走机构在各种地形下的越障能力;第三步:完成机器人行走机构的结构设计,利用UG软件对行走机构进行参数化建模,建立行走机构的虚拟样机模型、并利用多刚体运动仿真软件ADAMS对其在壕沟和该台地形下进行运动仿真并对仿真结果进行分析,最终仿真结果数据证明机器人行走机构能够达到所设计的要求和目标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种步行机器人的机械机构设计研究
摘要:文章以一种步行机器人机械机构的设计研究为背景,对步行机器人的机构设计问题进行了探讨分析。
该步行机器人由单相电机进行驱动,采用齿轮传达机构和步行机构使其实现稳定的静态步行。
通过对该机器人的仿真研究,结果表明该步行机器人能够实现设计时所期望的运动轨迹。
关键词:步行机器人机械机构设计仿真
步行机器人的研究对理论和实践具有重要的理论价值和现实意义。
它不仅可以丰富机器人研究的相关理论。
还可以推动人工智能技术、仿生学、计算机图形学、通信技术等相关学科的发展。
随着机器人逐渐被运用到越来越多的领域中,机器人的工作环境发生了变化,工作任务进一步复杂化,这就对机器人性能提出了更高的要求。
由于步行机器人具有体积小、对环境的适应性强、能耗小、避障碍能力强,移动盲区小等特征和优点,因而它具有广泛的实际运用领域,也吸引人们的普遍关注。
由于该机器人的设计要求实现步行和身体摆动等较为复杂的运动,设计的结构也相对较为复杂,对设计尺寸也有相关对严格的规定,同时还要求采用单电机进行驱动。
为了满足这些要求,文章设计了一种结构紧凑、易于控制的机械机构。
1 传动机构设计
由于是步行机械机构的设计,因而双足行走的驱动机构需要作重复的非完整圆周旋转运动。
而传达机构的作用就是将电机的连续旋转运动转变为重复的非完整圆周旋转运动。
一般情况下,为了实现这一转化,我们在设计中可以采用曲柄摇杆机构。
一般来说,中间构件会比较长,这使得传递的线路也会比较长,容易产生误差。
而线路长又会积累误差,这样一来,在传递过程中比较容易产生较大的误差积累。
与此同时,机构运动经过中间构件进行传递还会增加能耗,降低机械的使用效率。
除了会出现这些问题之外,死点的存在也会在很大程度上限制连杆机构的运用。
鉴于曲柄摇杆机构存在的缺陷,在这种步行机器人的机械机构的设计中,我们考虑采用齿轮传动。
齿轮传动是机械传动中比较常用的一种方式,它具有其它传动不可比拟的特点和优势,比如传动结构紧凑、传递比较稳定、传动工作可靠、传动效率高、传动装置使用寿命长等。
在一般的锥齿轮传动中,从动齿轮只能随着主动锥齿轮做旋转运动。
如果我们延长主动锥齿轮的轴,在从动锥齿轮的另一边再安装第二个锥齿轮和从动锥齿轮齿合。
由于在旋转方向上,第二个和第一个的旋转方向相反,所以该机构就自动被锁住了,无法运行。
在设计工作的实际中,如果我们只运用第一个主动锥齿轮的一半齿,去掉另一半齿,同时还去掉两个主动锥齿轮被削齿对面的一半,通过这样对齿轮的设计和调整,去掉一部分齿轮,就能够将电机的连续旋转运动转变为重复的非完整圆周旋转运动。
2 步行机构设计
如图1所示,秆d所指的是大腿,杆e所指的是小腿,杆f所示的是脚板。
在秆a和杆f之间采取相应的措施,使得他们之间相对固定。
轮b所指的是驱动轮,并且,它的驱动杆是杆a。
通过一点相应的连接措施,使杆a铰接在轮c上。
这样的结构方式使得杆a的运动形式为平动,这是由轮b和轮C所确定的。
在实际运动中,首先由杆a和杆f一起作平动,与此同时,他们的平动会同时带动杆e进行运动,而杆e进行运动又会带动杆d进行运动。
这样一来,看似杆d、e、f一起在作步行运动,而事实上是轮b、轮C和杆a在发挥着作用,杆d和杆e并不发挥主动的作用,他们只是作为从动件在整个机构设计中发挥作用。
在这个步行机构设计中,只要作为脚板f的面积足够大,能够承受住杆件的重量和运动时带来的压力,使得地面上的投影始终不超越支撑多边形的范围,这样一来,该机械机构就可以实现双足步行,而不需要步行稳定控制器的的支持就可以。
3 步行机器人仿真研究
为了验证该步行机器人机械机构设计的效果,我们进行了仿真研究。
通过详细的设计机构参数,我们的得出了具体的单腿运动参数。
这些运动参数是以下一个情况。
由1位置开始运动,杆a从这里顺时针旋转10?度便到达2位置,与此同时,杆b由1位置逆时针旋转至2位置;杆a反向逆时针旋转40度至3位置,与此同时,杆b继续逆时针旋转40度至3位置;杆a继续逆时针旋转10度至4位置,与此同时,杆b反向顺时针旋转10度至4位置;杆a反向顺时针旋转40度返回1位置,与此同时,杆b继续顺时针返回1位置,通过这样的旋转运动从而使一个步行周期得以完成。
4 结语
科学技术的进步必将推动机器人设计的进一步发展和进步。
随着整个社会对机器人要求的进一步提高,机器人的功能将进一步增强。
而机械机构设计在机器人的设计中占有重要的地位和作用,直接影响机器人整体功能的发挥。
文章主要探讨分析了一种步行机器人的机械机构的设计问题,这种机器人便于控制,采用单相电机进行驱动,运用齿轮传达机构和步行机构使其实现稳定的静态步行。
通过对该机器人的仿真研究,结果表明该步行机器人能够实现设计时所期望的运动轨迹。
总的来说,该机器人的机械机构的设计是正确的,结构紧凑,传动效率高,因此,在实践中,值得推广和应用该种机器人的机械机构设计方案。
参考文献
[1]祁乐,闫继宏,朱延河.小型双足步行机器人的研制[J].机械工程师,2006(11)
[2]余联庆,赵毅,杜利珍,饶成.小型双足步行机器人机械机构设计[J].中国水运(理论版), 2007,(7)
[3]付京逊.机器人学[M].北京:中国科学技术出版社,1989
[4]谭林,鲁守银,刘存根,张伟.小型仿人机器人的设计及步态规划[M].电子设计工程, 2009,(8)。