第一章自动控制概论
自动控制原理学习资料
《自动控制原理》学习资料第一章 自动控制概论1、教学目的: 掌握自动控制系统组成结构和基本要素,理解自动控制的基本控制方式和对系统的性能要求,了解一些实际自动控制系统的控制原理。
2、基本要求: 掌握基本概念:自动控制、反馈、控制系统的构成。
要求初步了解如何由系统原理图形成系统的原理方块图及判别控制方式的方法。
要求初步了解本门课程的意义与作用。
一、自动控制的任务通常,在自动控制技术中,把工作的机器的设备称为被控对象,把表征这些机器设备工作状态的物理参量称为被控量,而对这些物理参量的要求值称为给定值或希望值(或参考输入)。
则控制的任务可概括为:使被控对象的被控量等于给定值。
下面通过具体例子来说明自动控制和自动控制系统的概念。
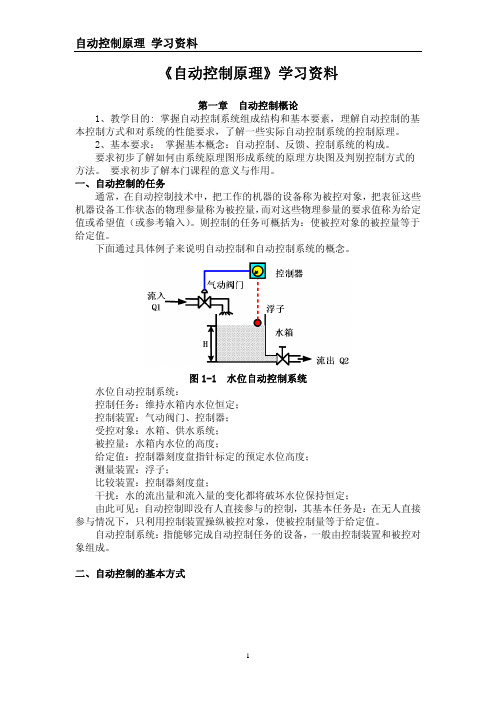
图1-1 水位自动控制系统水位自动控制系统:控制任务:维持水箱内水位恒定;控制装置:气动阀门、控制器;受控对象:水箱、供水系统;被控量:水箱内水位的高度;给定值:控制器刻度盘指针标定的预定水位高度;测量装置:浮子;比较装置:控制器刻度盘;干扰:水的流出量和流入量的变化都将破坏水位保持恒定;由此可见:自动控制即没有人直接参与的控制,其基本任务是:在无人直接参与情况下,只利用控制装置操纵被控对象,使被控制量等于给定值。
自动控制系统:指能够完成自动控制任务的设备,一般由控制装置和被控对象组成。
二、自动控制的基本方式图1-2 自动控制方框图在上图中,除被控对象外的其余部分统称为控制装置,其必须具备以下三种职能部件。
测量元件:用以测量被控量或干扰量。
比较元件:将被控量与给定值进行比较。
执行元件:根据比较后的偏差,产生执行作用,去操纵被控对象。
参与控制的信号来自三条通道,即给定值、干扰量、被控量。
下面根据不同的信号源来分析自动控制的几种基本控制方式:按给定值操纵的开环控制;按干扰补偿的开环控制;按偏差调节的闭环控制。
1、按给定值操纵的开环控制开环控制——系统的输出端与输入端之间不存在反馈回路,输出量对系统的控制作用没有影响。
自动控制的基本知识

七、调节过程的品质指标 调节过度过程: 1)等幅振荡 2)扩散振荡 3)衰减振荡 4)非周期过程
1。稳定性:衰减率
Ψ愈大,越稳定。 Ψ=0.75~0.98
2.准确性:准确性是指被控量的偏差大小,它包括动态偏差yM和 静态(稳态)偏差yK 动态偏差:在控制过程中,被控量与给定值之间的最大偏差称为动态偏差. 静态偏差:在控制过程结束后,被控量的稳态值y∞与给定值yg之间的残余
只包含一个容积
单容对象是最简单的热工调节对象,电厂热工生产过程中 许多储水容器,如除氧器、加热器、凝汽器等。
2)多容对象
包含两个或以上容积
(1)有自平衡能力的多容对象: 可用一个迟延时间为τ的纯迟延环节和个时间常数为Tc的惯性环节 近似。
(2)无自平衡能力的多容对象: 可用一个迟延时间为τ的纯迟延环节和一个积分环节近似。
3。阶跃响应特性:比较直观 在阶跃输入信号的作用下,系统的输出特性。 突然的扰动。 在电厂生产过程中,有许多输入信号近似于阶跃信号, 如负荷突然变化,阀门、挡板的开与关等。只要生产 过程允许,一般也比较容易通过控制机构(如控制阀 门)或扰动机构造成一个阶跃输入扰动。所以常在现 场用阶跃响应试验来检验控制系统的工作性能。
3。比例带δ对调节过程的影响
比例带: 3。比例带δ对调节过程的影响
比例带δ 小:调节作用强;
比例带δ太小:调节阀动作过频繁,不稳定。
二、积分调节规律调节器(P)
1。积分规律调节器的动态特性
U (S ) 1 WI ( S ) KP E (S ) Ti s 式中 Si——称为积分规律调节器的积分速度; Ti,——积分时间,习惯上多用积分时间来表示被调量偏差 积累的快慢。 Ti 越小表示偏差积累越快,积分作用越强。Ti是积分规律调节 器的整定参数。
自动控制知识
(三)、大系统理论和智能控制论(第三阶段)
1970年以后
1.大系统理论 是指规模庞大、结构复杂、变量众多的 信息与控制系统,交通运输、生物工程、社会经 济和空间技术等复杂系统。
2.智能控制论 是具有某些仿人智能的工程控制与信
息处理系统, 如智能机器人、无人驾驶飞机。
vcd
返回
返回
§1-2 基本控制方式
返回
§1-4 自动控制系统的分类
一、按给定信号分类: 1、恒值控制系统: 输入为常数,系统能排除扰动影响,使输
出保持恒定不变。 2、随动控制系统: 输入是时间的未知函数,要求输出跟随输
入信号变化。 3、程序控制系统: 输入量是时间的已知函数,要求输出以一
定精度跟随输入信号变化。
返回
二、按数学描述分类:
返回
四、自动控制系统举例 恒温箱自动控制系统
§1-3 自动控制系统的组成及术语
一、自动控制系统的组成 二、控制系统中的常用术语
返回
一、自动控制系统的组成
由控制器与被控对象组成,控制器是系统 中对被控对象起控制作用的各部分的总称。
被 控 对 象
自
控
系
统件 比调较节元元件件校 放 执 行 元 件
1、线性系统:用线性方程描述的系统。 性质:1)组成系统的所有元件都是线性元件; 2)具有齐次性和叠加性。
2、非线性系统:用非线性方程描述的系统。 性质:1)系统中只要有一个非线性元件就是
非线性系统。 2)不满足叠加原理。
三、按时间信号的性质分类
1.连续时间系统: 系统中所有信号都是连续函数形成的模拟量。
• 误差的稳态分量称为稳态误差;
• 稳态误差表示到达平衡状态(过渡过程 结束)的精度。
控制工程基础C作业2017答案S

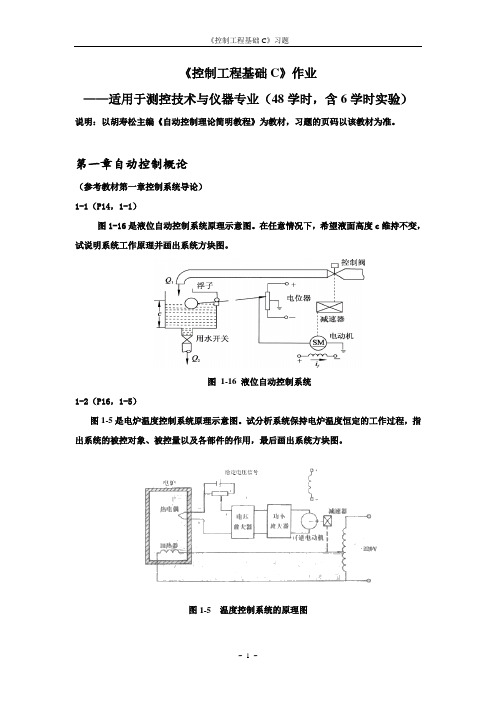
《控制工程基础C》作业和解答第一章自动控制概论1-1解:u(表征液位的希被控对象:水箱。
被控量:水箱的实际水位c。
给定量:电位器设定点位r c)。
比较元件:电位器。
执行元件:电动机。
控制任务:保持水箱液面高度不变。
望值ru)时,电动机静止不动,控制阀门有一定的开工作原理:当电位器电刷位于中点(对应rc。
一旦流入水量或流出水量发度,流入水量与流出水量相等,从而使液面保持给定高度rc。
生变化,液面高度就会偏离给定高度r例如:当液面升高时,浮子也相应升高,通过杠杆作用,是电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到c。
中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高c。
系统方块图如图所示到给定高度r在上图中,比较环节:电位器(电位比较);控制器:电位器(比例控制器);被控对象:电动机、减速器、控制阀、水箱(输出水位);检测变换:浮子连杆、电位器(位移—>电位)1-2解:被控对象:电炉。
被控量:炉温。
给定量:电位计的给定电压。
放大元件:电压放大器和功率放大器。
执行机构:电动机和减速器。
测量元件:热电偶。
工作原理:热电偶将温度信号转换为电信号,反映炉温,其输出电势与给定电信号之差为偏差信号。
偏差信号经电压放大和功率放大后,带动电机旋转,并经减速器使自耦调压器的活动触点移动,从而改变加在电阻丝两端的电压。
当炉温达到预定值时,热电偶感应的电压值与电位计输出电压大小相同,相互抵消,放大器零输出,电机不动,变压器输出电刷不动,电阻的端电压恒定,保持炉温等于希望值。
当炉温偏离希望值时,放大器输入端的平衡会打破,其输出电压会驱动电机通过减速器调节变压器输出电刷位置,改变电阻丝的端电压,使炉温达到希望值。
1_自动控制概述

35
建立作工程的思维方预备知识预备知识预备知识预备知识常微分方程解法常微分方程解法复变函数拉氏变换与付氏变换复变函数拉氏变换与付氏变换电路理论电路理论基本的电子学和力学知识基本的电子学和力学知识主要内容主要内容主要内容主要内容自动控制概论自动控制概论控制系统的数学模型控制系统的数学模型控制系统的时域分析法控制系统的时域分析法频率特性法频率特性法pid控制控制状态空间分析状态空间分析离散控制系统离散控制系统11自动控制概论自动控制概论自动控制概论自动控制概论自动控制理论的发展自动控制理论的发展自动控制的基本原理自动控制的基本原理自动控制的基本概念自动控制的基本概念自动控制系统的分类自动控制系统的分类自动控制系统结构自动控制系统结构控制系统的基本要求控制系统的基本要求自动控制理论的发展自动控制理论的发展自动控制理论的发展自动控制理论的发展自动控制理论的发展自动控制理论的发展经典控制理论经典控制理论4050年代形成年代形成siso系统基于
6
自动控制理论的发展
自动控制理论的发展 经典控制理论
40~50年代形成 SISO系统 基于:二战军工技术 研究对象:单输入单输出线性定常系统 目标:反馈控制系统的镇定 基本方法:传递函数,频率法,PID调节器
现代控制理论
60年代为适应宇航技术(宇宙飞船、导弹自 动制导)而发展的
7
自动控制理论的发展
27
自动控制系统的结构
闭环自动控制的一般组成
控制对象、执行元件、控制器、比较元件 测量元件——测量系统的输出量并与给定值 相比较。 执行元件——纠正偏差,或输出足够功率的 部件。 放大变换部件——将检测到的偏差信号加以 放大和进行能量形式的转换,并决定控制信 号是增大还是减小系统的输出量。
28
系统方框图
自动控制系统概述

1.1 引言
自动控制概念: 是指在无人直接参与的情况下,利用 控制装置(控制器)使被控对象(如生产过程中的位 移,速度,温度,电力系统中的电压,电流,功率等物理 量,或某些化合物的成分,航空航天中的飞船姿态等) 依照预定的规律进行运动或变化。 这种能对被控对象的工作状态进行控制的系统称为自 动控制系统。它一般由控制装置和被控对象组成
负反馈:输入信号—反馈信号(输出信号) 线性定常系统根据参考输入量又可分为:
它一般由控制装置和被控对象组成
自动控制:传感器、控制器、执行器、水箱+阀门
控制器
执行器
h 水箱系统
传感器
典型的自动控制系统方框图
参考输入 元件
参 考
理想化系统
输
入
r(t) +
_
b(t)
e(t)
控制元件
偏 差
主 反 馈
执行元件 反馈元件
+
g(t)
_ 系统误差
被控对象
被 C(t) 控 量
1.3自动控制与自动控制系统
反馈:将输出量通过一定的方式送回到输入端,并与 输入信号比较产生偏差信号过程称为反馈
负反馈:输入信号—反馈信号(输出信号) 输出偏差减小
正反馈:输入信号+反馈信号 反馈控制、闭环控制:按偏差进行控制
一些基本概念
b.设计。根据分析确定控制方法:
0.6
数字——物理装置
c. 仿真:数字,物理仿真,反复进行
0.4
d.实现:制作,调试、重购。
0.2
0 0
1
2
3
4
5
第一章 自动控制系统概述
+ 杠 杆
-
自动控制系统概述
自动控制原理:经典控制理论,即研究反馈控制。 自动化 自动控制(视频资料) 在没有人参与的情况下,通过控制器或控制装置来控制机器或者设备等物理装置,使
得机器设备的受控物理量按照希望的规律变化,达到控制目的。 是研究控制系统的一般规律,不是讲具体的控制对象、系统、元件。 对象:如炼钢、化工反应,航空航天,机械汽车加工。 系统:运动过程,力学、电学、光学、生物等 元件:控制器、执行(电机),传感器
2021/3/27
2
CHENLI
第一章 自动控制系统概述
自动化的发展过程回顾: ①设备自动化 本世纪50年代开始发展起来,由最初的机器、设备的控制问题,引出了机床、轧钢机等设备 的自动化。主要特点:自动调节系统的出现及其大量应用。 ②生产过程自动化 生产过程自动化需要考虑生产过程的协调、优化、计划与调度等问题。它是生产车间级的自动 化。 离散型生产过程的自动化 机械制造自动化,电子制造自动化,…… 连续型生产过程的自动化 化工自动化,冶金自动化,…… ③工厂自动化 工厂是由若干个生产车间组成的、能够完成一定的产品生产任务的实体,工厂自动化实现了产 品加工生产的自动化,工厂自动化=生产过程自动化+管理自动化。 ④企业自动化 企业自动化包括企业的生产加工、企业管理、产品(设计/开发)、市场、销售、计划等方面 的综合自动化,企业自动化的支撑技术包括:制造资源管理MRP-II,企业资源计划ERP,计 算机辅助设计/制造CAD/CAM,计算机集成制造CIM,并行工程CE,产品数据管理PDM,… 计算机集成制造CIM将制造视为一个信息处理、信息转换的过程,将制造过程视为一个集成的 过程,多种计算机技术与工具的综合应用。
自动控制原理课程教学大纲
《自动控制原理》课程教学大纲Principles of Automatic Control System课程编号:2000081适用专业:电气工程与自动化学时数:40 学分数:2.5执笔者:邱瑞昌王艳编写日期:2002.5一、课程的性质与目的概要:随着生产和科学技术的发展,自动控制技术在国民经济和国防建设中所起的作用越来越大。
自动控制技术的应用不仅使生产过程实现了自动化,极大的提高了劳动生产率和产品质量,改善了劳动条件,并且在人类探索新能源,发展空间技术和改善人民物质生活都起着极为重要的作用课程性质:自动控制原理是电气工程与自动化专业的技术基础课(专业基础平台课),是必修课,是以原理为主的理论性课程;主要讲述自动控制原理与控制系统设计、实验等内容。
根据自动控制技术发展的不同阶段,自动控制原来可分为古典控制理论和现代控制理论两大部分。
古典控制理论的主要内容是以传递函数为基础,研究单输入单输出一类自动控制系统的分析和设计问题。
这些理论研究较早,现在已经比较成熟。
并且在工程实践中得到了广泛的应用。
现代控制论是60年代在古典控制论的基础上,随着科学技术的发展和工程实践的需要而迅速发展起来的。
其内容主要以状态空间法为基础,研究多输入多输出、变参数、非线性、高精度、高效能等控制系统的分析与设计问题。
最优控制、最佳滤波、系统辩识、自适应控制等理论都是这一领域研究的主要课题。
特别是近年来由于电子计算机技术和现代应用数学研究的迅速发展,使现代控制理论又在研究庞大的系统工程的大系统理论和模仿人类智能活动的智能控制、生物控制、模糊控制等方面有了重大进展。
主要目的:培养学生1.掌握经典控制论中,线性定常连续、单输入单输出闭环控制系统的工作原理、分析和综合,掌握反馈控制原理的应用以及分析和设计的一般规律,使其具有分析和设计自动控制系统的初步能力,使学生对系统的认识上升到更高的层次。
2.了解控制系统中常用的检测装置,常用执行机构的工作原理,数学模型的建立过程,以及自控原理、经典控制论在当今的发展状况。
控制工程基础C作业2017
《控制工程基础C》作业——适用于测控技术与仪器专业(48学时,含6学时实验)说明:以胡寿松主编《自动控制理论简明教程》为教材,习题的页码以该教材为准。
第一章自动控制概论(参考教材第一章控制系统导论)1-1(P14,1-1)图1-16是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c维持不变,试说明系统工作原理并画出系统方块图。
图1-16 液位自动控制系统1-2(P16,1-5)图1-5是电炉温度控制系统原理示意图。
试分析系统保持电炉温度恒定的工作过程,指出系统的被控对象、被控量以及各部件的作用,最后画出系统方块图。
图1-5 温度控制系统的原理图第二章 控制系统的数学模型(参考教材第二章控制系统的数学模型) 2-1(P81,2-5)设弹簧特性由下式描述:F=12.65y 1.1,其中,F 是弹簧力;y 是变形位移。
若弹簧在形变位移0.25附近作微小变化,试推导Δy 的线性化方程。
2-2(P81,2-7)设系统传递函数为:2()2()32C s R s s s =++,且初始条件 (0)1(0)0c c =-=, 。
试求阶跃输入r (t )=1(t )时,系统的输出响应c (t )。
2-3(P81,2-8)如图,已知G(s)和H(s)两方框相对应的微分方程分别是:()610()20()dc t c t e t dt += ()205()10()db t b t c t dt+=且初始条件均为零,试求传递函数C(s)/R(s)及E(s)/R(s)。
2-4(P82,2-11(a )(b )(c ))已知控制系统结构图如图所示。
试通过结构图等效变换求系统传递函数C(s)/R(s)。
(a )(b )(c )2-5(p82,2-12(a ))试简化图中的系统结构图,并求系统传递函数C(s)/R(s)和C(s)/R(s)。
()N s2-6(p83,2-15(b )、(c ))试用梅森增益公式求图中各系统信号流图的传递函数C(s)/R(s)。
自动控制原理重点内容复习总结

N 1 G2 H1 G1G2 H 2
N
-H2 G1
G2
-H1 1
1Y
Y G1G2 R G1G2H2 N 1 G2 H1 G1G2 H2
例2 描述系统的微分方程组如下,已知初始条件全部为零。
画出系统的方块图,并求解Y(s)/R(s)。
x1 x 2
R H1 x 2 G2 x1 x1
线性系统的性质:可叠加性和均匀性(齐次性)。 本学期研究的主要是线性定常系统。
4、建立系统的数学模型的两种方法: (1)机理分析法:(2)实验辨识法:
二、传递函数
控制原理复习总结 第二章 控制系统的数学模型
定义:初始条件为零 的线性定常系统: 输出的拉普拉斯
变换与输入的拉普拉斯变换之比。
基本性质:
R( s)
表2 给定信号输入下的给定稳态误差esr
0 型系统 1 型系统 2 型系统
阶跃输入r(t)=1
1 K 1 Kp=K
0
Kp=∞
0
Kp=∞
斜坡输入r(t)=t 抛物线输入r(t)=1/2t2
∞
Kv=0
∞
1 K
Kv=K
∞
0
Kv=∞
1 K
Ka=0 Ka=0 Ka=K
Kp — 稳态位置偏差系数 Kv — 稳态速度偏差系数 Ka — 稳态加速度偏差系数
Y R
1 s2
1
H1 s
G2 s
G1 s
G2 H1
1 G2s G1S s(s H1 G2H1s)
控制原理复习总结
第三章 控制系统的时域分析方法
主要内容:
1、一阶惯性系统的单位阶跃响应,T、K的物理意义。 2*、标准二阶系统的单位阶跃响应,ζ和ωn、ωd 的物理意义。 3、高阶闭环主导极点的概念 4* 、控制系统单位阶跃响应过程的质量指标,ts,tp,σ,n 5 * 、劳斯稳定判据 6 * 、控制系统稳态误差 7、常规PID调节器的控制规律(调节器的形式和作用的定性分析)
自动控制原理
张 泉
第一章自动控制理论概论
第一节 第二节 第三节 自动控制理论的发展 自动控制与自动控制系统 自动控制系统应用示例
自动控制理论(Automatic Control Theory),是控制论的一个重要分支,包括 经典控制理论和现代控制理论两大部分,是 一门既与技术科学又与基础科学相关的学科, 同相对论和量子论一起被誉为20世纪上半叶 的三大伟绩。 本书主要介绍经典控制理论的基本内容。
4、 恒值系统、随动系统和程序控制系统
这是根据给定的参考输入信号的不同来分类的。 当系统的参考输入为一定值,而控制任务就是克服 扰动,使被控量保持恒值,此类系统称为恒值系统 (Uniform Control System);若系统给定值按照事先不 知道的时间函数变化,并要求被控量跟随给定值变化, 则此类系统称为随动系统(Following Control System); 若系统的给定值按照设定的时间函数变化,并要求被控 量随之变化,则此类系统称为程序控制系统 (Programed Control System)。如一些自动化生产线 等。 本书主要的研究对象是线性定常控制系统(Linear Time-Invariant Control System)。
三、机电控制系统
例1-3 造纸机分部传动 系统,如图1-10所示。 本例中,受控对象为电动机, 控制装置为电位器、放大器,测量 装 置为测速发电机,被控量为电 动机转速,给定值为适宜的转速值, 即 电压Ur。 工作中,压榨辊拖动电机 M的转 速由测速发电机TG检测出来,并转 换为速度反馈电压Uf。参考输入电 压Ur与反馈电压Uf都送到运算放大 器的输入端并相比较(相减),得 到偏差电压Ur-Uf,经过放大器放 大去控制拖动电机的转速。
自动控制理论第一章习题答案

⾃动控制理论第⼀章习题答案第⼀章⾃动控制概论思考题1、什么是⾃动控制?他对⼈类活动有什么意义?所谓⾃动控制就是在没有⼈直接参与的情况下,通过控制装置使被控制对象或⽣产过程⾃动地按照预定的规律运⾏,使之达到预期的状态或性能要求。
⾃动控制是⼈类在认识世界和发明创新的过程中发展起来的⼀门重要的科学技术。
依靠它,⼈类可以从笨重、重复性的劳动中解放出来,从事更富创造性的⼯作。
2、什么是反馈?什么是负反馈?通常,我们把输出量送回到输⼊端并与输⼊信号⽐较的过程称为反馈。
若反馈的信号是与输⼊信号相减⽽使偏差值越来越⼩,则称为负反馈。
3、开环控制系统是怎样实现控制作⽤的?请举例说明。
开环控制系统:如果系统的输出端和输⼊端之间不存在反馈回路,输出量对系统的控制作⽤没有影响,这样的系统称为开环控制系统。
例:原始的数控机床进给系统就是开环控制系统。
指令输⼊到计算机控制系统之中,带动步进电机运动,使⼯作台移动,产⽣位移输出。
在⽇常⽣活中,许多控制系统都可以理解成开环控制系统,如电风扇的转速是由档位决定的,不能根据环境温度⾃动调节;洗⾐机定时系统是由功能和时间决定,不能根据所洗⾐物清洁程度⾃动调节。
4、闭环控制系统是怎样实现控制作⽤的?请举例说明。
闭环控制系统:闭环控制(亦称为反馈控制,Feedback Control)是指能对输出量与输⼊量进⾏⽐较,并且将它们的偏差作为控制⼿段,以保持两者之间预定关系的系统。
如:⾃动调温空调,当环境温度⾼于设定温度时,空调制冷系统⾃动开启,调定室温到设定值。
5、对⾃动控制系统的基本要求是什么?对控制系统的基本要求是:系统的稳定性、响应的快速性、响应的准确性。
6、试叙述电冰箱中温度控制系统的温度控制过程。
电冰箱温度控制系统由感温管,温度调节,执⾏动作等系统组成。
冰箱没⼯作时,感温管内⽓体遇热就膨涨,触点就将两原来断开的接触点靠在⼀起了。
冰箱在⼯作时,由于冰箱内制冷系统在给冰箱不段的输⼊冷⽓,就越来越冷,随着温度不短降低,感温管内的⽓体缩⼩,⽓垫就将断点段开,然⽽就将冰箱停⽌⼯作!7、试叙述骑⾃⾏车时的闭环控制过程。
自动控制原理鄢景华版第一章
水温调节系统方框图
随动系统: 系统的给定值变化规律完全取决 于事先不能确定的时间函数。例如, 火炮系统,卫星控制系统等。
例:一位置随动系统的工作原理图。
i
控制任务:要求工作机械能够跟随指令机构同 步转动,即要使工作机械的角位置跟随给定指 令转角,亦即使:i o
首先确定以下基本问题: (1)受控对象: 工作机械; (2)被 控 量: 角位置; (3)指令转角: 给定值; (4)测量元件: 通过两个相同的电位计测量转角,并转换为 相应的电压; (5)计算比较: 两个测量电位计的桥式连接,即完成了减法运算, 两电刷之间的电压代表了被控量对给定量的误差; (6)执行机械: 电机减速装置。
人工控制和自动控制
油汀暖气片的温度控制
TC
冷 水
减 温 器
TT 温度 测量
过热蒸汽温度控制系统
液 位 调 HC 节 器 执行器
储罐
HT 差压变送器
液位控制
1-2 自动控制的基本方式
开环控制 闭环控制 复合控制
一、开环控制
控制装置与被控对象之间只有顺向作用而没 有反向联系的控制。
按扰动 补偿 电压放 大器 电阻R
MC n
ug
输入信号
ue
(- )
电压放 大器
功率放 大器
电动机
ut
ut
测速发 电机
电动机速度复合控制系统方框图
控制系统的组成 (1)
被控对象
控制系统
控制装置
测量元件 比较元件 放大元件
执行机构
校正装置 给定元件
控制系统的组成 (2)
1-3 典型控制系统
恒值系统:
+ RP1 u g R1 R0 R0 -ut +
自动控制原理 第六版 第一章

退出
开环控制:开环控制是指控制器与被控对象之间只有顺向作用 而没有反向联系的控制过程。 主要特点: 输出不影响输入,对输出不需要测量,通常容易实现;
2 自动控制方式
组成系统的元部件精度高,系统的精度才能高; 系统的稳定性不是主要问题; 按给定值操纵。信号由给定值至输出量单向传递。一定 的给定值对应一定的输出量。系统的控制精度取决于系 统事先的调整精度。对于工作过程中受到的扰动或特性 参数的变化无法自动补偿。结构简单,成本低廉,多用 于系统结构参数稳定和扰动信号较弱的场合,如自动售货 机,自动报警器,自动流水线等。
21
(1)、阶跃函数
0 函数表达式为: f (t ) R t0 t0
在任意时刻t0出现的阶跃函数可表示为
f (t t0 ) R 1(t t0 )
22
(2)、斜坡函数
0 斜坡函数的数学表达式为: f (t ) R t
t0 t0
如雷达-高射炮防空系统,当雷达跟踪的目标以恒定 速率飞行时,可视为该系统工作于斜坡函数作用之下。
测量装置
扰动
控制器
被控制 对象 输出 量
按扰动补偿 的原理方框图
退出
5
闭环控制:是指控制器与控制对象之间既有顺向作用又有反向 联系的控制过程。 主要特点: 输出影响输入,所以能削弱或抑制干扰;
低精度元件可组成高精度系统; 因为可能发生超调,振荡,所以稳定性很重要。 馈,负反馈。我们所讲述的反馈系统如果无特殊说明, 一般都指负反馈。
11
炉温控制系统方块图
炉温控制系统方块图
12
方块图中各符号的意义
元部件 方块(框)图 信号(物理量)及传递方向
中的符号
1控制系统概论

2010-12-24
21
1.2.5 其它分类方法
(1)按系统的输入/输出信号数量分:单入/单出系统(SISO) 和多入/多出系统(MIMO) (2)按控制系统的功能分:温度控制系统、速度控制系统、位 置控制系统等。 (3)按系统元件组成来分:机电系统、液压系统、生物系统。 (4)按不同的控制理论分支设计的新型控制系统分:最优控制 系统,自适应控制系统,预测控制系统,模糊控制系统, 神经网络控制系统等等。
(1)稳定性。自动控制系统的最基本的要求是系统必须是 稳定的,不稳定的控制系统是不能工作的。 (2)快速性。在系统稳定的前提下,希望控制过程(过渡 过程)进行得越快越好,但如果要求过渡过程时间很 短,可能使动态误差(偏差)过大。合理的设计应该 兼顾这两方面的要求。 (3)准确性。即要求动态误差和稳态误差都越小越好。当 与快速性有矛盾时,应兼顾这两方面的要求。
2010-12-24
32
在20世纪50年代,控制工程的发展的重点是复平面和根 轨迹的发展。进而在20世纪80年代,数字计算机在控制 系统中的使用变得普遍起来,这些新控制部件的使用使 得控制精确、快速。 状态空间方法属于时域方法,其核心是最优化技术。它 以状态空间描述(实质上是一阶微分或差分方程组)作 为数学模型,利用计算机作为系统建模分析、设计乃至 控制的手段,适应于多变量、非线性、时变系统。
2010-12-24
33
(三) 大系统控制理论阶段 20世纪70年代开始,出现了一些新的控制方法和理论。 (1)现代频域方法,该方法以传递函数矩阵为数学模型, 研究线性定常多变量系统; (2)自适应控制理论和方法,该方法以系统辨识和参数 估计为基础,处理被控对象不确定和缓时变,在实时 辨识基础上在线确定最优控制规律; (3)鲁棒控制方法,该方法在保证系统稳定性和其它性 能基础上,设计不变的鲁棒控制器,以处理数学模型 的不确定性;
自控01

n k
ud
1.1 自动控制系统的组成、分类和发展
控制理论的发展:(工业控制理论)
1 经典控制理论 40~50年代形成 SISO系统 基于:二战军工技术 目标:反馈控制系统的镇定 基本方法:传递函数,频率法,PID调节器 (频域) 2 现代控制理论 60~70年代形成 MIMO系统 基于: 冷战时期空间技术,计算机技术 目标:最优控制 基本方法:状态方程 (时域)
自动控制原理 Automatic Control Systems 第一章 自动控制概论 1.1 自动控制系统的组成、分类和发展
开环系统 给定值 r(t) 控制器 控制量 u(t) 被控对象 y(t) 被控量
例:直流电动机调速系统 ~
ug
优点:简单
n
k
ud
缺点:对扰动没有抑制能力
1.1 自动控制系统的组成、分类和发展
1.1 自动控制系统的组成、分类和发展
3 智能控制技术 90年代开始发展 专家系统 模糊控制 神经网络 4 正在发展的各个领域 自适应控制 大系统理论 H∞鲁棒控制 非线性控制(微分几何,混沌,变结构)
1.2 “自控原理”课程的特点和要求
学习系统的分析方法
· 经典控制论分析系统的方法:
系统稳定性
闭环系统: 给定值+ 偏差 r(t) - e(t) 控制量 控制器 被控对象 u(t)
被控量
y(t)
测量元件 负反馈:构成按偏差调节的闭环系统 反映了控制量与被控制量相互间的矛盾,动静性能 得到提高。
1.1 自动控制系统的组成、分类和发展
例:直流电动机调速系统
~
ug ub
控制量:ud = K (ug-ub) 偏差信号:ug-ub 按偏差调节:n↑→ub↑→( ug-ub)↓→ud↓→ n↓
自动控制习题
第一章自动控制概论一、单项选择题1、采用负反馈形式连接后()。
(分数:2分)A. 一定能使闭环系统稳定B。
系统动态性能一定会提高C。
一定能使干扰引起的误差逐渐减小,最后完全消除D。
需要调整系统的结构参数,才能改善系统性能正确答案:D2、按系统结构来分,控制系统可分为:开环控制,闭环控制和()。
(分数:2分) A。
温度控制B。
压力控制C。
流量控制D。
复合控制正确答案:D3、恒值控制系统的参考量为()。
(分数:2分)A。
常数B. 无规律变化C. 按程序设定变化D. 0 A第二章控制系统的数学模型一、单项选择题1、方框图化简时,串联连接方框总的输出量为各方框输出量的( )。
(分数:2分)A. 代数和B. 乘积C。
平均值D. 加权平均值正确答案:B2、单位阶跃信号1(t)的拉氏变换为()。
(分数:2分)A。
1B. 1/sC. sD. 1/(Ts+1)正确答案:B3、如果单回路单位负反馈系统的开环传递函数为G(s),则其闭环传递函数为:( )。
(分数:2分)A。
G(s)/[1+G(s)]B. G(s)/[1+G(s)H(s)]C。
1/[1+G(s)]D。
1/[1+G(s)H(s)]正确答案:A4、方框图化简时,并联连接方框总的输出量为各方框输出量的()。
(分数:2分)A. 代数和B. 乘积C. 平均值D. 加权平均值正确答案:A5、令线性定常系统闭环传递函数的分母多项式为零,则可得到系统的( ). (分数:2分)A. 代数方程B. 差分方程C。
特征方程D. 状态方程正确答案:C6、线性定常系统的传递函数是在零初始条件下( )。
(分数:2分)A。
系统输出信号与输入信号之比B。
系统输入信号与输出信号之比C。
系统输出信号的Z变换与输入信号的Z变换之比D。
系统输出信号的拉氏变换与输入信号的拉氏变换之比正确答案:D7、线性定常系统的传递函数由()决定。
(分数:2分)A。
输入信号的形式B。
初始条件C。
Chap1-概论

研究目标
系统分析及给定输入、 系统分析及给定输入、 输出情况下的系统综 合。
揭示系统的内在规律,实 揭示系统的内在规律, 现在一定意义下的最优控 制与设计。 制与设计。
自动控制理论发展简述
第一颗载人飞船(苏联,1961年 第一颗载人飞船(苏联,1961年) 第一颗人造卫星(苏联,1957年 第一颗人造卫星(苏联,1957年) 1969年7月20日,“阿波罗11号”飞船首次登陆 月球
控制工程理论
合肥工业大学 机械与汽车工程学院 机电工程系 陈 甦 欣
第一章 概论
• 1.1 自动控制理论发展简述 • 1.2 自动控制系统的基本概念 • 1.3 控制理论在机械制造工业中的应用
自动控制理论发展简述
人体自然系统: 人体自然系统:
体温控制系统、心跳控制系统、眼球聚焦系 统、新陈代谢系统、血液循环系统、呼吸系统、 肾肝肺系统。这些系统持续的自动控制是我们保 持健康的基本条件、这些系统是在我们没有意识 干预的情况下自动运行的。 天体自然系统: 天体自然系统:银河系的恒星运动; 季节自然系统: 季节自然系统 四季气候变更; 人造系统: 人造系统:洗衣机、电冰箱、电饭煲、电梯控制 系统、温度控制系统、水位控制系统、速度控制 系统、刹车防抱死系统。
自动控制理论发展简述 “现代控制理论”是在“经典控制理论”的 现代控制理论” 现代控制理论 是在“经典控制理论” 基础上, 60年代以后发展起来的 年代以后发展起来的。 基础上,于60年代以后发展起来的。 根据自动控制理论的内容和发展的不同阶 它的 主要内容是以状态空间法为基础,研究多 状态空间法为基础 主要内容是以状态空间法为基础,研究多 控制理论可分为“经典控制理论” 段,控制理论可分为“经典控制理论”和“ 输入,多输出、时变参数、分布参数、 输入,多输出、时变参数、分布参数、随 现代控制理论”两大部分。 现代控制理论”两大部分。 机参数、非线性等控制系统的分析和设计 机参数、 经典控制理论”的内容是以传递函数 传递函数为 “经典控制理论”的内容是以传递函数为 问题。最优控制、最优滤波、系统辨识、 问题。最优控制、最优滤波、系统辨识、 基础, 基础,以频率法和根轨迹法作为分析和综合 自适应控制等理论都是这一领域重要的研 系统基本方法,主要研究单输入 单输出这 单输入, 系统基本方法,主要研究单输入,单输出这 究课题, 究课题,近年来计算机技术和现代应用数 类控制系统的分析和设计问题。 类控制系统的分析和设计问题。 学的结合, 学的结合,又使现代控制理论在大系统理 论和模仿人类智能活动的人工智能控制等 现在又相继提出了生物控制论, 现在又相继提出了生物控制论,经济控 诸多领域有了重大发展。 诸多领域有了重大发展。 制论和社会控制论等, 制论和社会控制论等,控制理论已经渗透到 各个领域,并伴随着其它科学技术的发展, 各个领域,并伴随着其它科学技术的发展, 极大地改变了整个世界。 极大地改变了整个世界。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制的起源(续)
生物学家的术语,数学家不会理解,但生 物学家所用的方法,数学家可能领悟;物 理学家的语言,医生不会明了, 可是物理 学家所用的方法,医生却有了然的可能。 这个谈话会是三十六行,但话题却集中在 科学方法上, 所以可以说是科学方法谈话 会。
自动控制的起源(续)
自从莱布尼兹(Leibniz)而后,世界上再没有统摄 Leibniz(1646-1716)最主要的貢獻則是把微 整个科学领域的通才。 分與積分的技巧整理得很清楚,包括微分的 到了十九世纪,几位大的科学家,也只是称雄一 四則定理──亦即函數的四則運算與微分運 面。十九世纪没有出莱布尼兹,而只有出高斯 算的交換法則;也包括了積分的分部積分技 巧──它是經由微積分基本定理導得的。 (Gauss),法拉第(Faraday) ,达尔文(Darwin)这 微積分經過一段時期的醞釀,終於在 Newton 类大人物,我们把他们名为数学家、 物理学家、 與 Leibniz 兩人的手中,成為有系統的學門,所 生物学家等。 以簡單的說法就認定他們兩人是微積分的發明者。 可是到了二十世纪,配称数学家的也不见了,对 于一位专门的大家,在称呼时必加以限制,如拓 扑学的数学家;或光学的物理学家等。
水下机器人,它的工作方式是:由水面母船上的工作人员, 通过连接潜水器的脐带提供动力,操纵或控制潜水器,通过 水下电视、声呐等专用设备进行观察,还能通过机械手,进 行水下作业。
自动控制技术还体现在 交通运输中,大量的飞 机地铁等交通工具中都 大量采用。
2003年6月10日,勇气号发射成 功;同月25日,机遇号发射成 功。2004年美国东部标准时间1 月3日和24日火星车分别登上火 星。上面采用了大量先进的智 能控制技术。
马克士威尔有一篇文章专说控速器,这个字Governor是源于 拉丁。不论是希腊字,还是拉丁字。
有人用在操纵的意义上,有人用在舵向的意义上,有人用在 管理的意义上,有人用在限制的意义上。 于是这个意义贯穿了物理、数学、生物、 经济以及政治等。 我们把这门学问模糊的译出意义来,是『控制论』。
控制论发源是否起清华园
钱学森-扭转一个学科的命运
1954年,钱学森在美国出版《工程控制论》 (Engineering cybernetics),把控制论发展为 一门技术科学—工程控制论,成为推动控制论科 学思想的代表人物之一。 《工程控制论》第一版是英文版,于1954年在美 国出版。当时钱学森在加州理工学院担任教授, 也是喷气推进实验室(JPL,如书中扉页所写,当 时称为“Jet Propulsion Center ”)的负责人。 那段时期钱学森在美国受到迫害,被迫离开了国 防尖端技术的研究,受困达5年之久。在困境中, 他转向了工程控制论的研究,并出版了此书。中 文版是在1958 年出版的.
1.4 自动控制系统的基本要求 1.5 自动控制系统的分析与设计工具
本章学习要求
1. 理解和掌握负反馈控制原理 2. 了解控制系统的组成和分类 3. 能确定控制系统的被控对象、被控量 和给定量,掌握根据工作原理图绘制系统 方框图的方法 4. 掌握对控制系统的基本要求
1.1 自动控制的基本原理
控制论的创立是多学科和多位学者共同推 进的结果,与二战的背景,美国当时的技 术条件、各门相关的科学理论的成熟与交 融密切相关.
扭转一个学科的命运
但维纳的《控制论》发表后,在哲学界曾引起轩 然大波。此书的副标题是“动物和机器中的控制 和通信”。人也是动物,把人和机器并列,甚至 等同起来,有亵渎人类尊严之嫌,所以惹怒了不 少哲学家。 前苏联的哲学界首先发起攻击,称控制论是一种 反动的伪科学,是现代机械论的一种新形式。还 有更严重的批评说,控制论是为帝国主义服务的 战争工具等。这位科学家在前苏联和东欧被视为 反动的伪科学家和帝国主义的帮凶。
发展三阶段
30年代, 波德和奈奎斯特, 频率特性法,经典 控制理论, 研究单因素控制系统, 反馈控制, 自动调节器 60年代,贝尔曼和卡尔曼,状态空间法为代表, 现代控制理论,研究多因素控制系统,重点是最 有控制,核心是电子计算机 大系统理论,研究对象众多因素的大系统,重点 是递解控制,核心智能化机器 控制理论的研究对象是“控制系统”, 以数学方 法为工具,以工程技术为支持(背景),控制理 论是一门专业性,工程性的技术科学。
1. 自动控制技术及应用
动画1 动画2
自动控制:
在无人直接参与的情况下,利用外加的控制 在无人直接参与的情况下,利用外加的控制装置, 使机械、设备或生产过程(被控对象)的某一个物 装置,使机械、设备或生产过程(被控对象) 理量(被控量)按预定的规律(给定量)运行。
自动控制系统:
(给定量)运行。
的某一个物理量(被控量)按预定的规律
控制论与自动控制理论
控制论是20世纪中期的科学进步、技术进步和社 会进步的结果,它是在哲学,数学,生物科学, 技术科学,社会科学基础上产生 控制论是一般的控制理论,控制论的原理和方法 被运用于工程技术领域形成的工程控制论,通常 被理解为自动控制理论。 控制理论通常指自动控制理论,控制理论既可以 指控制论以前的伺服机构理论,也可以指控制论 以后的工程控制论。
将被控对象和控制装置按照一定的方 式连接起来,组成一个有机总体,这就 是自动控制系统。
谈到自动控制,同学们能想起那些控制 应用的实例呢?
日本Honda公司推出经过改进的 机器人“ASIM”。这种能用双腿 直立的机器人相当聪明,人手指 到哪里,它就走到哪里,遇到人
的时候会主动向人打招呼,并能
和主人流利地对话。
2.自动控制理论的发展史
起源
相对论、量子力学以及控制论被认为是20 世纪的三项伟大科学成就。 1948年美国科学家维纳发表专著提出了控 制论(Cybernetics)。 1954年,钱学森在美国出版《工程控制论》 (Engineering cybernetics),把控制论 发展为一门技术科学—工程控制论,成为 推动控制论科学思想的代表人物之一。
《工程控制论》出版
1954 年《工程控制论》出版,并迅速地被译成德、 俄、中文版。书中系统地揭示了控制论对自动化、 航空、航天、电子、通信等科学技术的意义和深 远影响,写的全是技术科学,并未触及到人类这 种动物的尊严。包括前苏联在内的世界各国科学 界立即接受了这一新学科,从而吸引了大批数学 家、工程技术学家从事控制论的研究,推动了五 六十年代该学科发展的高潮。 在这种形势下,原持批判态度的哲学家们只好放 下武器,悄悄修改了各辞书中的词条,肯定控制 论是一门“研究信息和控制一般规律的新兴科 学”。
自动控制的起源(续)
这种过度的分工,是不得不然的,是越演越烈的。 由一行分成三十六行,由三十六行分成三百六十 行,由三百六十行,分成三千六百行,二十世纪 的科学家,不下三万六千行了。 这种局面的形成,产生了两个副作用,
第一、是行与行间形成了许多无人管的地带; 第二、甲行所研究出的程序、方法、
谈论的启发
这个现象很像一个舵手把舵时, 把船身形成了左右摆动一样。人 所以不能接一支香烟,是因为人 的动作是受制于一种信号, 而这 个信号的大小却为正在进行中的 反应所左右。换句话说,一个原 因产生一个相应的结果, 而这个 结果又成为一个新的原因刺激到 原来的系统上。把随时所产生的 效果变成了原因的一部分。 如果 把原因结果的相互关系图解出来, 如左图
自动控制原理
河南农业大学 理学院 电子信息科学系 主讲:滕红丽
课程安排
课时:64学时 56学时理论学习,8学时实验 学分:4.0 教材:自动控制原理简明教程(第2版) 主编:胡寿松 出版社:科学出版社 授课时间:1-14周
第一章 控制系统导论
1.1 自动控制的基本原理 1.2 自动控制系统示例 1.3 自动控制系统的分类
自动控制的起源(续)
这个由各个方面专门学问中走来的科学家们,是 没有共同语言可谈的。 但为什么越谈越有兴趣呢? 他们究竟谈些什么大 家全能欣赏的题目呢? 又有什么题目可以引出个人有价值的言论,可以 提起团体的兴趣呢? 他们所根据的是每个人专门的学问。而所谈的, 是使大家能领悟的,是根据个人的观点所了解的 科学方法。
或设备,可能对 乙行有极大的效用,但乙行常无从利用起,依然是从 头开始。
哈佛医学院的谈话会,正是在这种气候下产生的。 而就由这个会中产生了『自动控制』的基本观念。
第一道源泉-反馈的观念
医生作了报告:有一种病人,坐在椅子上, 与健康的人毫无差别。但你如果给他一支 香烟, 他伸手接烟时,总对不准香烟的位 置,不是左摇就是右偏,他的手变成摇来 摇去的运动,而始终接不到香烟。 这位病人的肌肉是强壮的,身体是健康的。 但是却不能有系统的组织他的动作。
影响许多人改变专业
戴汝为院士便是其中之一。戴院士是在1951 年考入 清华大学的数学系,经过1952年的院系调整,于 1955年在北大的数学力学系毕业,毕业之后被分配 到了力学所。所里给每个大学生安排一个导师,由 于戴院士要整理《工程控制论》的笔记,所以就跟 着钱老。正因为当时做的一系列与《工程控制论》 相关的工作,戴院士后来就进了自动化所,直到现 在。许多人认识戴院士,也是因为《工程控制论》 中文译本的出版。 西北工业大学校长戴冠中教授和总装部科学技术委 员会主任、前国防科技大学校长郭桂蓉中将,也都 是受了《工程控制论》的影响,改变了他们最初的 专业。
国内学界存在一种观点,即控制论思想的 酝酿始于清华园,其论据是,控制论的创 始人维纳在其自传中说过 “宁愿选择1935 年中国之行作为创立控制论的起点”.
出版发行
美国数学家诺伯特.维纳(Norbert Wiener, 1984-1964), 1948年, 出版《控制论》 此书的副标题是“动物和机器中的控制和 通信”。