基于VxWorks与RTWEmbeddedCoder的无人直升机机载飞控软件系统开发
基于VxWorks的一种机载SAR中央控制软件设计
工作 参 数 的 打 包 , 实现 全 机 工 作状 态的 检 测 , 形 成 故 障 维 护 清单 。 并
ST ACK
_
SZ , UN T )Gp — i _ rc .0 ,0 ,0 ,0 IE( F CP R v su me Po ,0 ,0 ,0 ,0 , T
央 控 制 软件 中 , 以 满足 机 载 S R 的 实时 性 要 求 。机 载 S R 中 可 A A
数 编 排 波 束 发送 到波 束 控 制 计 算 机 ,波 束 控 制 计 算 机 准 备 好 中 断 信 号 , 中央 控 制计 算机 和 波束 控 制 计 算 机 同步 之后 , 生 硬 让 产
《 业 控 制计 算 机 } 0 2年 第 2 工 21 5卷 第 9期
3
基于 V Wok 的一种机载 S R中央控制软件设计 x rs A
De i f Ce t r Co t lSot r fa r o n AR a e n Vx sgn o n e nr f o wa e o n Ai r e S B s d o Wo k b rs
弋
J
—— — 1 —
… …
堑 一 堕 .
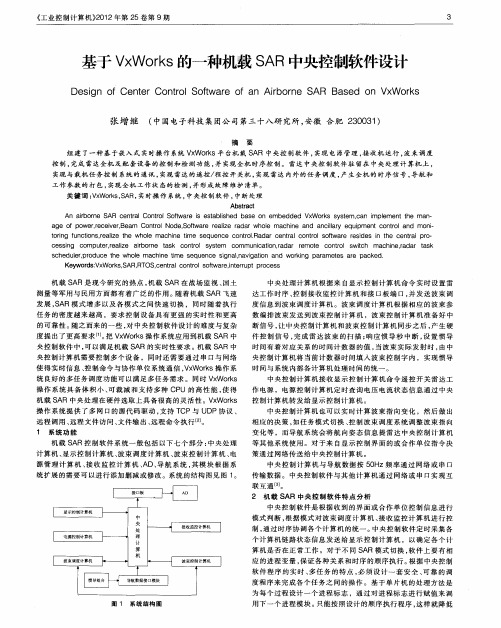
间任 务 列 表 匹 配控 制 , 又可 以显 示 控 制 界 面 实 时 控 制 , 程 如 图 流
2所示
』
Vx ok 操 作 系 统 W rs
J
一
一
一
一
一
一
! 塑 一 ,
I
基于VxWorks实时性航天相机管理软件设计
1 0
长春理工 大学学报 ( 自然科学版 )
了保 证 调 焦或 调 偏 流 的精 确性 , 天相 机 都 加人 了 航
下, 每秒 执 行一 次 , 可完 成像 移 补偿 计 算 、 时调 偏 实 移 时 间 设 置 、 AN 总线 检 测 、 C C C D下 电保 护 、 道 轨
高分 辨 率 的 光 电编码 器作 为 测量 机 构 , 调 焦 或调 流 、 在 编码 器参 数 采集 、 控遥 测参 数 采集 、 C 热 C D行转 偏流 过程 中 , 时读 取编码 器 数据进 行 闭环控 制 。 实
wA G S aj,X i I un N ho u U We,J G ag N
( h nc u stt o pi ,Fn eh nc dP yi ,C iee a e f c ne ,C agh n1 0 3 ) C agh nI tue f t s ie ca i a hs s hn s d myo i cs h cu 30 3 ni O c M sn c Ac S e n
启 或对 相机 C CD进行 下 电保 护 ; 实时 采集 相机 的温 序 的 驱动 下 工作 , 责解 析 C 负 AN总线 指 令 和数 据 、 度 数 据 和 内部 电压 模 拟 量遥 测 , 证 相 机 工作 在 正 完 成 相 机 拍 照 参 数 设 置 、 照类 指 令 发 送 、 环 调 保 拍 开 常 的温 度范 围 内和正 常 的电压 下 , 保相 机安 全 ; 确 实 焦 、 闭环 调焦 、 偏 流 归零 、 调 相机 关 机等 功 能 。在 相 时采 集 相机 主控单 元 与 成像 单 元 的 通信 状 态 , 证 机管理软件 中指令类相关任务有指令解析任务 、 保 开 相 机拍 照 相关指 令 的正 确执 行 。为 了防止 空间 环境 环 调 焦任务 、 环调 焦任务 、 流归零 任务 和关 机准 闭 偏 干扰 , 相机 管理 软件 还要 对 内存进 行检 测 , 防止 单粒 备 任务 。 子等 空 间效应影 响 相机 的正 常运行 。 ( ) 信类 相关 任务 负责 完成 C 3通 AN总线链 路 和 RS 2 串 口链 路 中数 据 的发 送 和接 收 , 中各数 据 42 其
基于Matlab和VxWorks的无人机飞控系统半物理仿真平台研究
2005年6月第23卷第3期西北工业大学学报Journal of Northwestern Polytechnical University J une 2005Vol.23No.3基于Matlab 和VxWorks 的无人机飞控系统半物理仿真平台研究吴成富,段晓军,吴佳楠,马松辉(西北工业大学自动化学院,陕西西安 710072)摘 要:介绍了一种新的基于Matlab/R TW (Real 2Time Workshop )和VxWorks 实时操作系统的仿真方法,构建了基于Simulink 的某型无人机飞控系统仿真模型,可自动生成优化的嵌入式实时仿真代码、在线调整模型参数并监视仿真数据。
与传统的手工编写和修改仿真模型代码的方法相比,加速了半物理仿真平台的研制。
通过使用该平台对某型无人机飞控系统进行了大量的实时半物理仿真,优化了控制律。
关 键 词:无人机,飞控系统,仿真,Matlab ,R TW ,VxWorks 中图分类号:TP13,V249.1 文献标识码:A 文章编号:100022758(2005)0320337204 一般的飞控系统仿真总是分为2个阶段:纯数字仿真阶段和半物理仿真阶段。
飞控系统半物理仿真平台的研制除了设计和构建半物理仿真的硬件平台之外,一个工作量很大的内容就是开发半物理仿真软件。
而传统的半物理仿真软件开发都是由开发人员手工编写仿真代码,工作量大且容易出错。
对于一般的开发过程虽然能在纯数字仿真阶段使用Matlab 等仿真软件开发仿真模型,但是到了半物理仿真阶段还需要人工把在纯数字仿真阶段使用的仿真模型翻译成可以被实时仿真机执行的代码而不能直接利用数字模型。
怎样才能利用已经开发好的仿真模型,直接把这些模型放到仿真机中运行呢?Matlab 的R TW (Real 2Time Workshop 实时工作空间)[1]能够实现这一功能。
使用基于Matlab/R TW 的实时仿真方法将大大减少仿真软件的开发量、避免各种手工编写代码出现的错误、缩短半物理仿真平台的开发周期。
信息技术论文:RTW和VxWorks的飞控系统仿真实验平台的开发
RTW和VxWorks的飞控系统仿真实验平台的开发0、引言飞控系统仿真工作是飞控系统设计工作的重要辅助手段。
在系统设计初期进行数学仿真研究,对飞机运动特性需要进行详细分析,建立飞机的数学仿真模型,检验飞控系统的功能是否符合要求。
数字仿真的目的是方便快速地得到初步设计结果,能够很好地指导系统设计工作的进行。
由于对飞控系统仿真实验的实时性要求很高,单纯在Matlab/Simulink下进行的仿真不能够完全满足仿真实时性的要求,本实验平台采用VxWorks操作系统作为软件代码运行环境,完全可以满足系统对仿真实时性的要求,采用RTW自动代码生成功能可以大大减少仿真软件的开发工作量,避免手工编码引入的错误,缩短仿真试验平台的开发周期。
1、基于RTW和VxWorks的仿真实验RTW是Matlab图形建模和仿真环境Simulink的一个重要补充功能模块,它是一个基于Simulink的代码自动生成环境,它能够直接从Simulink的模型中产生优化的、可移植的和个性化的代码,并根据目标配置自动生成多种环境下的程序,利用它可以加速仿真过程,生成可以在不同的快速原型化实时目标下运行的程序。
RTW十分适合用于加速仿真过程、快速原型化、形成完善的实时仿真解决途径和生成产品级嵌入式实时应用程序,使用RTW进行实时硬件的设计测试,用户可以缩短开发周期,降低成本。
VxWorks是专门为实时嵌入式系统设计开发的操作系统软件,为程序员提供了高效的实时任务调度、中断管理、实时的系统资源以及实时的任务间通信[5]。
VxWorks从1983年设计成功以来,已经经过广泛的验证,成功地应用在航空、航天、舰船、通信、医疗等关键领域。
该操作系统具有良好的持续发展能力、高性能内核以及友好的用户开发环境使其在嵌入式实时操作系统领域处于领先地位。
Tornado集成开发环境是嵌入式实时领域中最新一代的开发调试环境,是实现嵌入式应用程序的完整的软件开发平台,是开发调试VxWorks系统不可缺少的组成部分。
基于RTW和VxWorks的飞行控制系统实时仿真
第19卷第11期系统仿真学报©V ol. 19 No. 11 2007年6月Journal of System Simulation Jun., 2007基于RTW和VxWorks的飞行控制系统实时仿真孔繁峨,陈宗基(北京航空航天大学自动化科学与电气工程学院, 北京 100083)摘要:介绍了一种使用Simulink/RTW建模工具和Tornado/VxWorks嵌入式实时操作系统进行飞行控制系统快速原型的方法。
首先对一个非线性的纵向短周期运动的飞机模型进行了线性化后的动态逆控制系统的设计。
该控制系统满足C*准则。
然后使用Simulink的模型代码自动生成技术,生成经优化的可直接在VxWorks系统上实时运行的应用程序,并且能够实时监控目标机的运行状态以及对Simulink模型实现在线调参。
接着,以Pentium4处理器微机为目标机,在以太局域网的环境中下载可执行模块,实时运行和监控目标机的运行。
最后,将实时仿真的结果与Simulink的数字仿真结果进行了对比分析。
关键词:RTW;VxWorks;实时;飞控系统中图分类号:V249.1 文献标识码:A 文章编号:1004-731X (2007) 11-2455-03Real-Time Simulation of Flight Control System Based on RTW and VxWorksKONG Fan-e, CHEN Zong-ji(School of Automation Science and Electrical Engineering, Beihang University, Beijing 100083, China) Abstract: A rapid prototype method of flight control system was introduced based on RTW in Matlab/Simulink and Tornado/VxWorks. A nonlinear longitudinal short-period aircraft model was given. And a dynamic inversion control system satisfied with the C*.criterion was designed by feedback linearization. RTW generates optimized source code and executable modules by using auto generator from the Simulink models. When running in Vxworks, the modules can be monitored real-time and regulated online. In an ether local area net (LAN) environment, the modules were downloaded to the target computer based a Pentimum4 personal computer and run real-time. Compared with the results only in Simulink, the comparison simulation result figures and some conclusions were given.Key words: RTW; VxWorks; Real-Time; Flight Control System引言RTW (Real-Time Workshop)是Matlab图形建模仿真环境Simulink的一个重要功能扩展模块,它是一个基于Simulink 的源代码自动生成环境,能够直接从Simulink模型中生成优化的、可移植的源代码,并能根据目标机的配置生成相应的实时应用程序[1]。
基于VxWorks的飞机供电控制管理软件设计

EXCHANGE OF EXPERIENCE 经验交流摘要:论文对供电控制管理软件需求进行了分析,根据其实时性、可靠性要求高等特点,选择了基于实时操作系统VxWorks的软件开发模式,对软件的任务划分、优先级设置和任务间的通信机制进行了设计,在实际应用中验证了设计的合理性和可靠性,为基于VxWorks 的飞机供电控制管理软件设计提供一定的参考。
关键词:VxWorks;供电控制管理软件;多任务程序一、前言随着现代飞机逐步向多电乃至全电的方向发展,供电系统信息化、测试性、维修性等要求也大大提高,因此供电控制管理计算机承担了对供电系统状态感知、信息融合处理、容错构型控制以及用电负载自动管理等重要功能,驻留其上的供电控制管理软件具体实现上述功能,对软件的可靠性和实时性有较高的要求。
VxWorks 是一个运行在目标机上的实时操作系统,可根据用户需求进行裁减,具有良好的可靠性和实时性,在航空航天等领域被广泛应用[1]。
二、供电控制管理计算机交联设备供电控制管理软件运行于供电控制管理计算机上,外围设备的交联关系为:供电控制管理计算机通过1553B 总线接收航电发送的控制命令,并向航电上传供电系统的简图页信息、飞参信息和告警信息,并通过429总线接收发电机控制器(GCU)、直流电源控制保护器(DCPCU)上传的状态信息进行供电系统信息综合处理。
三、供电控制管理软件需求供电控制管理软件需实时采集供电系统各汇流条电压状态、接触器、继电器和断路器的通断状态以及故障状态,通过429总线接收发电机控制器、直流电源控制保护器上传的总线信息,综合上述信息后解算得到供电系统的简图页信息、飞参信息和告警信息,通过1553B总线上传给航电实时显示;根据采集的供电系统状态完成大功率负载的自动管理、供电系统故障时的供电转换控制。
四、软件开发模式从软件需求可以看出,供电控制管理计算机需将当前供电系统的状态实时发送给航电进行显示,同时需完成供电系统的容错控制和负载管理功能,因此供电控制管理软件具有实时性、可靠性要求高等特点。
基于VxWorks的航海导航软件数据处理模块设计
基于VxWorks的航海导航软件数据处理模块设计
罗文
【期刊名称】《黑龙江科技信息》
【年(卷),期】2015(000)031
【摘要】导航软件在船舰航海导航中发挥重要作用,针对导航软件数据处理模块外部接口多,实时性要求高,采用基于优先级的多任务调度机制和消息队列技术,在VxWorks平台下对接口数据进行处理,实现与导航板间的数据通信(接收、发送)和数据解算、处理,得到位置、速度、卫星信息等数据,解决了导航软件数据处理模块外部接口多实时性要求高的问题。
经测试,软件可靠性较高,数据延迟较小,基本满足用户需求。
【总页数】1页(P144-144)
【作者】罗文
【作者单位】四川九洲空管科技有限责任公司,四川绵阳 621000
【正文语种】中文
【相关文献】
1.基于 VxWorks 的有线通信模块设计 [J], 曹文继;王小龙;杨向;白奉强
2.基于ETX模块的机载数据处理模块的设计 [J], 李孟华;栾前进;高群立;罗宏凯;李哲
3.基于VxWorks的多串口数据处理系统设计 [J], 段世梅;刘晶晶;孙倩
4.GPS航海导航软件的设计与实现 [J], 王琦;张继旭
5.基于VxWorks的雷达点迹数据处理系统的设计与实现 [J], 董巍
因版权原因,仅展示原文概要,查看原文内容请购买。
基于VxWoks的直升机飞控系统半物理仿真软件技术
第3 8卷
第 1 期
航 空 计 算 技 术
Ae o a t a o u i gT c n q e r n u i l mp t e h iu c C n
Vo . 8 No. 13 1
20 0 8年 1 月
Jn 2 0 a.0 8
可靠 性 、 实的编写 质量 ; 二是操 作系统 的实 时性能 。
R a-i eWokh p R W) Ma a el m rso ( T 是 T t b图形 建模 仿 l 真环境 Sm l k的一个 重要模块 。它 的用 途是 由 Sm i ui n i. un l k模 型直接生成 独立 可执 行 的 、 直 接在 实 时操 作 i 能 系统 中运行 的 C代 码 , 根 据 目标 机配 置 自动 生 成 适 并 合该 目标机 软硬件 环境 的可执行 程序 。可支 持 的硬件
高, 提供 基于优 先级 的抢 占式 任务调 度 、 效 的任 务 同 高 步、 通信 和数据 互斥保 护机制 。
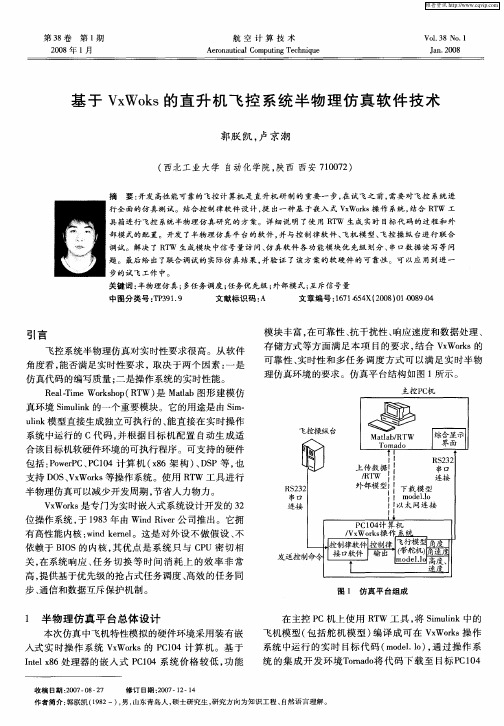
图 1 仿 真 平 台 组 成
1 半物理仿真平台总体设计
本次仿 真 中飞机特性模 拟 的硬件环 境采 用装 有嵌 入式 实 时操 作 系 统 V Wo s P 14计 算 机 。 基 于 x r 的 C0 k
引言
飞控系统半 物理仿 真对 实时 眭要求很 高 。从 软件 角度看 , 能否满 足实 时性要 求 ,取决 于两 个 因素 : 是 一
模块 丰 富 , 可靠性 、 干扰 性 、 在 抗 响应 速度 和数 据处理 、 存 储方式 等方 面满 足 本 项 目的要 求 , 结合 V Wo s x r 的 k
。
结 合 控 制 律 软 件 设 计 , 出 一 种 基 于嵌 入 式 V Wok 操 作 系统 , 合 R W 工 提 x rs 结 T
基于VxWorks的无人直升机离合器自动接合系统设计
( e a gU i r t,B in 0 1 1 h a B i n n esy e ig109 ,C i ) h v i j n
Absr c : u c u o e g g n sa ke r c s fu ma n d heio trt c iv u o tc tk f. e t a t Cl t h a t - n a i g i y p o e so n n e lc p e o a h e e a t mai a e o To me t t e r q ie n fa srp— rv lt h a t — n a i g n he de in i e ft e cu c u o e g gng i i— h e u r me to ta d e cu c u o e g gn ,a d t sg d a o h l th a t - n a i s d s i
接 合 的 实际 需要 , 出了一 种新 的基 于 V Wok 的 离合 器 自动 结 合 系统 方 案 , 驱动 电路 和应 用层 软 提 x rs 从
件两个方面论述了该方案的设计思路。飞控计算机以发动机和旋翼 的实时转速为反馈 , 根据预定逻辑
对 当前 结合状 态进行 判 断 , 通过 外接 放 大电路 和驱 动 电路 对 离合 器 电机 进行保 护和控 制 , 并 实现 对 离合
c se n t o a p c sw i h we ed v i u t n ot a e d s n o p l ai n ly r l h o to o u - u s d o w s e t h c r r e c r i a d s f r e i f p i t a e .F i tc n r l mp t i c w g a c o g c
基于VxWorks的无人直升机操纵控制系统设计与实现
图 3.10 微控制器部分电路………………………………………………………...35
vi
承诺书
本人郑重声明:所呈交的学位论文,是本人在导师指导下,独 立进行研究工作所取得的成果。尽我所知,除文中已经注明引用的 内容外,本学位论文的研究成果不包含任何他人享有著作权的内容。 对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文 中以明确方式标明。 本人授权南京航空航天大学可以有权保留送交论文的复印件,允 许论文被查阅和借阅 , 可以将学位论文的全部或部分内容编入有关 数据库进行检索,可以采用影印、缩印或其他复制手段保存论文。
作者签名: 日 期:
南京航空航天大学硕士学位论文
第一章
1.1 引言
绪
论
无人驾驶飞机是一种机上无人驾驶、可重复使用的航空飞行器,亦称无人 机或遥控飞行器[1]。无人机诞生于 20 世纪 20 年代,50 年代以后有了较大的发 展。无人机最初用于航空运动,而后用作飞行员和地面武器训练的靶机。上世 纪 60~70 年代美越战争中, “火蜂”无人机执行侦察任务,大大减少了人员伤 亡。80 年代科索沃战争中,无人机获取重要的军事情报,引起各国军方的重视, 90 年代的海湾战争、本世纪的阿富汗战争和伊拉克战争中无人机有更加出色的 表现[2][3]。 无人飞行器的种类繁多,按照机翼类型可以分为固定翼飞行器与旋翼飞行 器/直升机两类。 无人直升机相对于固定翼无人机具有机动灵活, 可以垂直起降、 定点悬停等优点,是无人机发展的一个重要方向。 飞行控制系统作为无人直升机的核心,对无人直升机的飞行性能具有决定 性的影响。近些年来,随着航空技术、控制理论、计算机技术以及仿真技术的 飞速发展,飞行控制技术也日趋完善。飞行控制系统的先进程度成为无人飞行 器飞行性能的重要指标。 无人直升机操纵控制系统也称为舵机伺服系统,是无人直升机飞行控制系 统中不可缺少的关键组成部分。其功能与人的手、脚相似,它接受控制指令后, 依照指令的性质要求去控制相应的舵面运动,从而控制飞行器的飞行状态。因 此,伺服操纵系统的性能好坏直接影响着飞行控制系统的性能和飞ห้องสมุดไป่ตู้安全。 近年来,随着航空航天技术的蓬勃发展,人们对飞行器上的舵机伺服系统 的整体性能要求越来越高。根据动力源的不同,常用的舵机系统可分为气动舵 机、液压舵机及电动舵机等。与气动与液压舵机相比,电动舵机(EMA)具有 结构简单、加工装配容易、线路铺设、制造维修及改装方便等特点,且易实现 余度控制,可靠性高,因而在无人机、导弹等各种飞行器中得到越来越广泛的 应用[4][5]。 同时,飞行控制系统也经历了传统飞行控制技术[6]、反馈线性化[7]、自适应 飞行控制[8]、神经网络飞行控制[9]、软件使能控制[10]等各种设计方法的发展,
基于RTW和嵌入式操作系统VxWorks的飞控系统半物理仿真实现
基于RTW和嵌入式操作系统VxWorks的飞控系统半物理仿
真实现
曹锦业;卢京潮;郭鹍;梁丽均
【期刊名称】《计测技术》
【年(卷),期】2004(024)006
【摘要】提出一个飞控系统半物理仿真方案.仿真系统基于嵌入式实时操作系统VxWorks,使用RTW工具箱将飞机的Simulink仿真模型下载到PC104计算机平台,提高了半物理仿真的效率和可靠性.设计开发支持PC104嵌入式计算机的VxWorks板载支持包,研究RTW的代码生成过程,解决了实现该方案的关键技术.【总页数】4页(P31-34)
【作者】曹锦业;卢京潮;郭鹍;梁丽均
【作者单位】西北工业大学自动化学院,陕西,西安,710072;西北工业大学自动化学院,陕西,西安,710072;西北工业大学自动化学院,陕西,西安,710072;西北工业大学自动化学院,陕西,西安,710072
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于Matlab和VxWorks的无人机飞控系统半物理仿真平台研究 [J], 吴成富;段晓军;吴佳楠;马松辉
2.RTW在飞控系统半物理仿真软件设计中的应用 [J], 李谦;闫建国;秦玮
3.基于VxWorks和RTW的直升机半物理仿真系统 [J], 袁燎原;卢京潮
4.RTW在某型直升机飞控系统半物理仿真中的应用 [J], 郭朕凯;卢京潮
5.基于RTW和VxWorks的飞控系统仿真实验平台研究 [J], 陈怀民;吴凯;程鹏飞;段晓军
因版权原因,仅展示原文概要,查看原文内容请购买。
基于VxWorks的无人直升机飞控应用软件改进与实现
基于VxWorks的无人直升机飞控应用软件改进与实现胡泽龙;孙刚;徐智【摘要】在开发有人直升机飞控系统应用软件的基础上,结合某型无人直升机特性,实现对该型无人直升机原有飞控系统应用软件的改进.该改进的飞控应用软件基于VxWorks多任务操作系统进行开发,通过硬件与软件相结合,实现了双余度管理,能够提升直升机飞控系统的控制性能及可靠性.通过在模拟仿真环境下的严格验证,该软件能够实现所设计的功能,并且能够使某型无人直升机正确有效地完成飞行任务.【期刊名称】《直升机技术》【年(卷),期】2018(000)004【总页数】5页(P24-28)【关键词】双余度;无人直升机;飞行控制系统;VxWorks操作系统【作者】胡泽龙;孙刚;徐智【作者单位】中国直升机设计研究所,江西景德镇 333001;中国直升机设计研究所,江西景德镇 333001;中国直升机设计研究所,江西景德镇 333001【正文语种】中文【中图分类】V249.1220 引言无人直升机从起步到如今,一直饱受关注。
无人直升机重量轻,体积小,能够更有效地完成多种特殊任务。
飞控系统作为无人直升机的飞行控制核心,对于飞行安全以及任务的顺利完成,起到十分关键的作用。
飞控应用软件是飞控系统的关键软件,对于飞控系统能够顺利飞行更是起到决定性作用。
某型无人机飞控软件基于μC/OS-II操作系统编写,采取单一余度管理,对于整体飞控系统要求很高。
而采用VxWorks作为操作系统,进行双余度设计,能够有效地避免单一余度失效导致的各种问题,在单机状态下依旧可以顺利地完成飞行任务,提高了飞控系统的可靠性。
本文通过对某型无人直升机进行改进,实现一款基于VxWorks操作系统的,采用双余度架构的无人直升机飞控系统应用软件,能够实现该型无人直升机飞行控制与管理系统的主要任务,稳定直升机姿态(俯仰、横滚)和航向,控制发动机风门和直升机飞行航迹(爬升、下降、巡航、左右盘旋、悬停等),完成从起飞到降落整个过程的飞行管理,包括对动力装置、机载电气设备和任务设备的管理、故障诊断及处理等多项任务。
基于VxWorks的小型无人机飞行控制软件设计
基于VxWorks的小型无人机飞行控制软件设计
张朋;李春涛
【期刊名称】《计算机测量与控制》
【年(卷),期】2014(22)8
【摘要】针对小型无人机功能日益复杂,迫切需要提高实时性与可靠性等现状,开发了一套基于VxWorks实时操作系统的小型无人机飞行控制软件,实现了无人机自主起飞、空中巡航和自主着陆等飞行控制功能;在完成软件需求分析的基础上,设计了飞行控制软件的总体结构,并结合VxWorks操作系统的运行机制给出飞行控制软件模块化设计方案,着重介绍了多任务环境下任务划分及优先级分配策略;半物理飞行仿真试验表明:该飞行控制软件能够实现自主、指令、人工3种飞行模式下的飞行控制功能,具有良好的实时性和可靠性,满足飞行控制软件最初的设计需求,同时大大降低了开发难度,提高了软件的可维护性和可移植性.
【总页数】5页(P2687-2691)
【作者】张朋;李春涛
【作者单位】南京航空航天大学自动化学院,南京 210016;南京航空航天大学自动化学院,南京 210016
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.一种ARM+DSP架构的小型无人机飞行控制平台软件设计 [J], 雷金奎;赵晨;陈浩
2.小型固定翼无人机飞行控制软件设计与开发研究 [J], 张岩
3.基于H2最优控制的小型无人机飞行姿态控制器设计 [J], 冀晓萌;董朝轶;李健;闫放
4.基于多DSP的无人机飞行控制软件设计 [J], 刘培强;祖家奎
5.基于STM32微控制器的小型无人机飞行控制系统 [J], 董峰;常佶
因版权原因,仅展示原文概要,查看原文内容请购买。
基于VxWorks和RTW的直升机半物理仿真系统
基于VxWorks和RTW的直升机半物理仿真系统
袁燎原;卢京潮
【期刊名称】《火力与指挥控制》
【年(卷),期】2013(038)003
【摘要】为了完成直升机飞控计算机的仿真测试,设计了基于实时操作系统VxWorks和RTW(Real-Time Work-shop)的仿真系统.首先,使用RTW工具箱自动生成了基于VxWorks实时操作系统的仿真代码.其次,针对仿真平台设计的关键技术,如VxWorks操作系统的移植、PCI设备驱动程序、可执行模块加载等进行了研究和实现.最后,通过与数字仿真结果的对比,验证了半物理仿真系统的正确性.【总页数】4页(P133-136)
【作者】袁燎原;卢京潮
【作者单位】西北工业大学自动化学院,西安710129
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于RTW和嵌入式操作系统VxWorks的飞控系统半物理仿真实现 [J], 曹锦业;卢京潮;郭鹍;梁丽均
2.RTW在某型直升机飞控系统半物理仿真中的应用 [J], 郭朕凯;卢京潮
3.基于RTW和VxWorks的飞控系统仿真实验平台研究 [J], 陈怀民;吴凯;程鹏飞;段晓军
4.基于RTW和VC的半物理仿真系统的开发 [J], 常广晖;王永生;梁述海;王雪山
5.基于RTW和VxWorks的无人机仿真系统设计与实现 [J], 向孝龙;陈欣;李春涛因版权原因,仅展示原文概要,查看原文内容请购买。
基于VxWoks的直升机飞控系统半物理仿真软件技术
基于VxWoks的直升机飞控系统半物理仿真软件技术
郭朕凯;卢京潮
【期刊名称】《航空计算技术》
【年(卷),期】2008(38)1
【摘要】开发高性能可靠的飞控计算机是直升机研制的重要一步,在试飞之前,需要对飞控系统进行全面的仿真测试.结合控制律软件设计,提出一种基于嵌入式VxWorks操作系统,结合RTW工具箱进行飞控系统半物理仿真研究的方案.详细说明了使用RTW生成实时目标代码的过程和外部模式的配置.开发了半物理仿真平台的软件,并与控制律软件、飞机模型、飞控操纵台进行联合调试.解决了RTW生成模块中信号量访问、仿真软件各功能模块优先级划分、串口数据读写等问题.最后给出了联合调试的实际仿真结果,并验证了该方案的软硬件的可靠性.可以应用到进一步的试飞工作中.
【总页数】4页(P89-92)
【作者】郭朕凯;卢京潮
【作者单位】西北工业大学,自动化学院,陕西,西安,710072;西北工业大学,自动化学院,陕西,西安,710072
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于Matlab和VxWorks的无人机飞控系统半物理仿真平台研究 [J], 吴成富;段晓军;吴佳楠;马松辉
2.基于RTW和嵌入式操作系统VxWorks的飞控系统半物理仿真实现 [J], 曹锦业;卢京潮;郭鹍;梁丽均
3.基于虚拟现实的无人机飞控系统半物理仿真研究 [J], 程林;樊琼剑;杨忠;沈春林
4.RTW在某型直升机飞控系统半物理仿真中的应用 [J], 郭朕凯;卢京潮
5.基于虚拟现实的无人机飞控系统半物理仿真研究 [J], 程林;樊琼剑;杨忠;沈春林因版权原因,仅展示原文概要,查看原文内容请购买。
基于VxWorks实时性航天相机管理软件设计
基于VxWorks实时性航天相机管理软件设计王绍举;徐伟;金光【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2012(035)001【摘要】The resolving power and reliability of aerospace camera put forward a new demand to the real time performance of software.The real time software of aerospace camera with multitask is designed based on VxWorks, which is an embedded operating system.The software is composed of VxWorks tiny kernel, system trap, interrupt service routine and custom tasks.Different custom tasks are designed with the relation of every function in the aerospace camera.In the software, the main task is drived by hard interrupts, and other tasks are drived by the main task with semaphore or message.Multitask running in parallel can improve the real time performance of system, achieve the function of aerospace camera and have high reliability.%航天相机的分辨率和可靠性对相机管理软件的实时性提出了新的要求.基于嵌入式操作系统VxWorks,采用多任务思想设计了实时性航天相机管理软件.该软件由VxWorks微内核、系统Trap、中断服务子程序和自定义任务四部分组成,结合相机各功能之间的联系,设计不同的自定义任务.相机管理软件依靠硬件中断驱动主任务,主任务又通过信号量或消息驱动其它任务,多任务并行运行极大的提高了系统的实时性,在实现相机功能的同时也具有较高的可靠性.【总页数】4页(P9-12)【作者】王绍举;徐伟;金光【作者单位】中国科学院长春光学精密机械与物理研究所,长春130033;中国科学院长春光学精密机械与物理研究所,长春130033;中国科学院长春光学精密机械与物理研究所,长春130033【正文语种】中文【中图分类】TP302【相关文献】1.一种基于Vxworks的高空气球任务管理软件设计 [J], 程小军;林回祥2.基于VxWorks的星务管理系统软件多任务实时性调度设计 [J], 赵建坤;张大松;胡爱兰;李建宏3.基于VxWorks的载波通信管理装置软件设计 [J], 姜元建;王斌4.基于VxWorks的SAR任务管理系统软件设计 [J], 唐黎江;刘浩;胥霜霞5.基于VxWorks的飞机供电控制管理软件设计 [J], 郭朋;陈勇;张阳;杨涛因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
De i n o l h o to o t r y tm a e n sg fa f g tc n r ls fwa e s se b s d o i V W o k n r sa d RTW Em b d e d r e d d Co e
施 晓 颖 .褚 双 双
(. 军 装 备 部 陕 西 汉 中 7 3 1 ; . 西 千 山航 空 电 子 有 限 责 任 公 司 陕 西 西安 7 06 ) 1海 223 2 陕 10 5
摘 要 :开升机 控 制 系统 研 制 的 重 要 核 心 。 结 合 控 制 律 软 件 的 设 计 , 文 提 出一 种 本
Ab t a t i h p r r n e a d r l b e fih o to o t r i a mp r n O i h e eo me t o n n e s r c :h g - e o ma c n e i l g t c n r l s f f a l wa e s n i o t t C r n t e d v lp n f u ma n d a e
t si g p af r fa wo k b s d o i l k R W mb d e o e s u l ai i d r l i t ft e p e t l t m r me r a e n S mu i / T n o n E e d d C d rWa b i .v ld t a ei l y o m ̄a Wa t yn b a i h m s
基 于 V Wok 嵌 入 式操 作 系统 和 R W 环 境 的 飞 控 软 件 开 发 方 案 。 建 了机 栽 飞 控 软 件 总体 架 构 。采 用 V Wok x rs T 构 x r s多
任 务 调 度 机 制 进 行 任 务 管 理 满足 飞 行 控 制 的 实 时 性 要 求 。 用 有 限 状 态 机 实现 无人 直 升 机 的 行 为控 制 。 后 搭 建 了 应 最 基 于 Sm l k, T E e ddC d r iui R W mbd e o e 开发 测试 平 台框 架 并 验 证 了该 方案 的 有 效 性 和 可 靠 性 n 关 键 词 :无 人 直 升 机 ;飞行 控 制 软 件 ; x rs V Wok ;有 限 状 态 机 ; T R W
S a - i g ,C HIXio y n HU S u n -h a g h a gs u n 2
( . u m n D p r e tfteN v , nhn 2 2 3 C ia 1 i e t e at n o h ay Hazog7 3 1 , hn ; p m 2 AV CS an i . I ha x Q 帆 Av n sC . Ld X ’ 7 0 6 , i ) m w o, t, i帆 10 5 C n h a
v rf d e i . i e Ke r s u ma n d h l o tr l g t o t l ot I y wo d : n n e ei p e ;f h n r f  ̄;Vx o k ;f i tt c i e c i c o s wa W r s i t aa e ma h n ;唧 ne
第2 0卷 第 4期
V0 .0 1 2 No4 .
电 子 设 计 工 程
E e t n c De i n En i l cr i sg g n o
21 0 2年 2月
Fe b.2 2 01
基 于 V Wok x rs与 RT E e d dCo r的 W mb d e de 开 无人 直 升机机载 飞控 软件 系统 发
h l o t r f g t c nr l s se ei p e ih o to y t m.A e ih o to ot a e d v lp n l h c s b e n Vx o k mb d e c l n w f g t c n r l s f r e eo me t p a w ih i a d o W r s e e d d l w n s o e ai g s se a d r n i n n a r p s d c mb n n h o t ll w s f r . r o e f g tc n r ls f a e p r t y t m n W e vr me tw sp o o e o i i g t e c n r a ot e Aib r i h o t ot r n o o wa n l o w f me o k wa u l Vx o k l - s c e ui g me h n s w s u e o s n a e n o me tt e r q i me t o r a w r sb i . W r s mu t t k s h d l c a im a s d f rt k ma g me tt e e u r t ia n a h e ns f
ra- mefg t o t 1Fnt tt c iewa s dt o to e a ir f h n n e eio tr ial d v lp n n e li ih nr . ii s ema hn su e c nrl h vo eu ma n dh l pe. n l t l c o e a o b ot c F y, e eo me t d a