基于dsPIC30F2010的无刷直流电动机正弦波驱动系统设计
一种基于dsPIC的无刷电动机调速系统设计
摘 要 :介 绍 了无刷直 流 电动机 数 学模 型 ,提 出 了基 于 dPC ( 字信 号 控 制器 ) 的数 字控制 系 sI 数 统 方案 ,详细介 绍 了调 速 系统 的 主 要硬 件 电路 以及 软 件 设 计 方 案 ,最 后 对 调 速 系统进 行 建 模 、 仿真 ,得 到 了转速 电流仿 真 曲线, 系统 实 际运 行 也 同样 得 到 转速 电流 曲线及 电流 波形 。 通过 对
3 软 件 设计
调速 系 统 采 用 转 速 电流 双 闭 环 控 制 方 法 。 主 程 序完 成 电 流 和 速 度 调 节 。 电 流 P 节 周 期 为 I调 52 s 1 ,速度 P 调 节 周 期 为 5 1 s I . 2 m 。定 时器 T 1 结合 P WM 引脚 来产 生 P WM 信号 。 定 时时 间 为 1 s 0m ,其 中断 程序 主要 把 电流 、电压 及1 文献标 志码 :A 文章编 号 :10 -88 2o ) 009 .3 O 1 4 (o 8 1 .0 80 6
一
种 基 于 dPC的 无刷 电动 机 调 速 系统 设 计 sI
刘汉忠 ,李 宁 ,赵
( 南京工程学 院 自动化学 院,南京
涛
a cn o poet a cm n e ae n dPC,w i a ido hp po ue yMi e i l o t l r c w sr o med db sd o sI r j e hc w sakn f i rd cdb e hp h c o r
c mp n o a y,i u c s in, t e d sg fman cr u t a d p o r m n l d n o h r e e p e e t d n s c e so h e in o i i i n rg a i c u i g f w c a t w r r s n e , c s l s
dsPIC30F2010控制直流无刷无传感器电机

AN992作者:Stan D’SouzaMicrochip Technology概述本应用笔记介绍了如何使用dsPIC30F2010数字信号控制器控制无传感器的BLDC 电机。
应用中采用的技术是基于另一Microchip应用笔记:《dsPIC30F在无传感器BLDC 控制中的应用》(AN901)。
本文介绍了如何将dsPIC30F2010器件用于AN901中介绍的硬件和软件,AN901中使用了dsPIC30F6010器件和dsPICDEM™MC1电机控制开发板。
dsPIC30F6010具有80个引脚,拥有144 K字节的闪存程序存储器, 8 K字节的RAM以及数量较多的I/O。
而dsPIC30F2010只有28个引脚,使其I/O数目受到限制。
该款芯片只拥有12 K字节的闪存程序存储器以及512字节RAM的有限资源。
本应用笔记说明了如何对AN901应用笔记中介绍的硬件、软件和用户接口进行修改以利于其代码能够方便地移植到dsPIC30F2010器件。
有关使用dsPIC30F实现BLDC无传感器控制的设计细节,请参阅应用笔记AN901。
由于程序代码实现的功能并未改变,因此AN901中介绍的所有可实现的BLDC控制功能仍旧是相同的。
所需硬件实现本文中介绍的电机控制应用需要使用以下硬件:•PICDEM™ MCLV 开发板(图1)•Hurst DMB0224C10002 CL B 6403 24 V BLDC 电机•24V直流电源用户可以从Microchip购买上述全部硬件或只购买其中某项。
有关订购信息,请浏览Microchip 网站的开发工具部分。
硬件改动图2 给出了无传感器BLDC电机控制应用的简化结构框图。
该图有助于用户自己开发硬件来驱动无传感器的BLDC电机。
PICDEM MCLV 控制板的原理图附录A中给出。
图1:PICDEM™ MCLV 开发板用dsPIC30F2010控制无传感器BLDC电机2005 Microchip Technology Inc.DS00992A_CN第1页AN992DS00992A_CN 第2页 2005 Microchip Technology Inc.图 2:PICDEM™ MCLV 控制板功能除dsPIC30F2010器件外,该框图的基本结构与AN901中完全相同。
使用 dsPIC30F2010控制带传感器的 BLDC电机
使用 dsPIC30F2010 控制带传感器的 BLDC 电机
著者: Stan D' Souza Microchip Technology
引言
dsPIC30F2010 是一款专门为嵌入式电机控制应用设计 的 28 引脚 16 位 MCU。它主要是为交流感应电机(AC Induction Motor, ACIM)、无刷直流电机 (Brushless DC,BLDC)和普通直流电机这些典型的电机类型而专 门设计的。以下是 dsPIC30F2010 的一些主要特性:
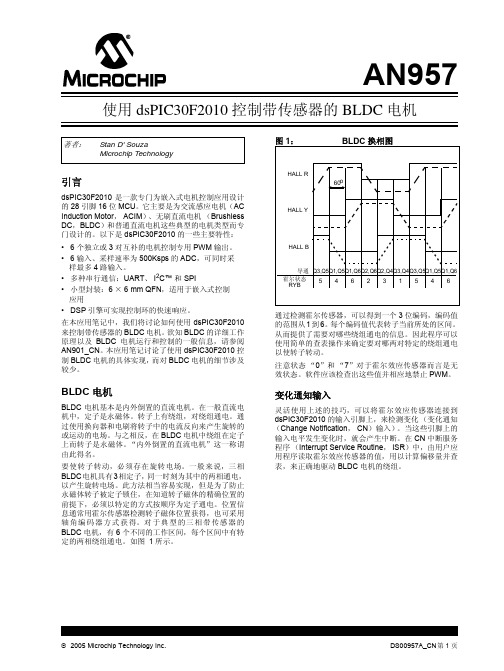
dsPIC30F2010 有六个由 PWM 信号驱动的 PWM 输出。 如图 2 所示,通过使用六个开关、IGBT 或 MOSFET, 可以将三相绕组驱动为高电平、低电平或根本不通电。 例如,当绕组的一端连接到高端驱动器时,就可在低端 驱动器上施加占空比可变的 PWM 信号。这与将 PWM 信号加在高端驱动器上,而将低端驱动器连接到 VSS 或 GND 的作用相同。一般更喜欢对低端驱动器施加 PWM 信号。
注意在使用最大功率时必须提供充分的散热,这一点很 重要。MOSFET 驱动器也需要一个较高的电压(15V) 来运行,因此需要提供这么高的电平。该电机是 24V BLDC 电机,因此 DC+ 到 DC- 母线电压为 24V。需要 提供 5V 的稳压电源来驱动 dsPIC30F2010。3 个霍尔效 应传感器的输出信号连接到与变化通知电路相连的输入 引脚,使能输入的同时也使能相应中断。若这 3 个引脚 中的任何一个发生了电平变化,就会产生中断。为了提 供速度给定,将一个电位计连接到 ADC 输入(RB2)。
表 1: 状态 1 2 3 4
PWM 输出改写示例
OVDCON<15:8> OVDCON<7:0>
基于dsPIC30F3010的无刷直流电动机控制系统设计

(co lfEet n n r ainE gn ei I om t nier g X ’nTc nl c coc f o n ga
e
, ia 10 2 C i ) X ’n7 0 3 , hn a
Ab t a t Ai n t tra p ia in , i wi d i ga d c s a i g n n t e r b e ,w t h t o f c — s r c : mi g a o p l t s sz d n l n o ts vn ,a d ma y o h rp o lms i t e meh d o k mo c o e n h Ba EMFz r r s i gd t cin, sa l h das t f e s d s b u h e s eoc o s n eet o e tb i e e o s n o e s r s ls DCmo o c n r l y tm wh c a a e nd P C O 3 1 s tr o t s os e i hw sb s do s I 3 F 0 0 c i . ay e h o t lc i n t e p e a i u t h n e tra d t e MOS F rv rcr u t h e h s MF hp An l s d t e c n r h p a d i p r h r cr i,t e i v r n h o s i l c e ・ ET d e i i,t r e P a e BE i c
d t cie cr u t c re t a l g a d o e otg r t ci ncr u t d v l p d t ema n P o r m n d u e e t h n lr ee t i i, u r n mp i n v r l ep oe t i i, e e o e i r g a a d me i m v n a d e v c s n v a o c h
基于dsPIC单片机的无刷直流电机控制系统

n a d s o t t i h sa i t m o wi h g b l y h h t i
极的A 相控制信号, 其阴影部分为通 过 自 举得 到
的高端驱动, 毛刺是 由杂散 电感 引起。 为电机 图8
的反电势波形。
图7 I 10 R2 1 的HO LLO 出波 形 ( 1RP ) 输 78 M
通过对 以上的波形分析和L D C 的观察, 表明
本系统是完全可行 的, 在最低速和额定转速之间 电机稳定运转。 改变电机负载时转速的变化也符 合闭环要求。
…
2雷
浩. 无位 置 传感 器 无 刷 直 流 电动机 控 制 系统 研 究 【 . 中科 D】华
技大学,0 6 20.
I 。I I _ . :
Rf B^伽 黼 1 删 S J O| f 搿 协
3 何礼 高 等. s I 0 电机 与电 源 系列 数 字信 号 控制 器 原理 与应 用 dPC3 F 【 . 京 : 京 航空 航 天 大学 出版社 , 0 7 . M】 北 北 2 0年 4王晓明, 周青 山. 动机 的DS 电 C控制 一 一 微 芯 公司 dP C 用 . sI应 北 京 : 京 航 空 航 天大 学 出版 社 , 0 9 . 北 20年
J
清时值清断数 l 定器 ,中计值
自带 保护 功能 , 护 引脚 为S 当其 为高 电平 保 D, 时, 封锁I 2 的输出, 10 R 1 通过 采样主电路中的
图 4 I 0 中断服 务 流程 NT 的
用dsPIC30F3010实现无刷直流电动机正弦波驱动
15 3 8
计算机与数字工程
C o mp u t e r& Di g i t a l En g i n e e r i n g
总第 2 8 7期 2 0 1 3 年 第 9期
用 d s P I C 3 0 F 3 0 1 0实 现 无 刷 直 流 电 动 机 正 弦 波 驱 动
ห้องสมุดไป่ตู้
中 图分 类 号
S i n u s o i d a l Co n t r o l o f BLDC Ba s e d o n d s P I C3 0 F3 0 1 0
M匣 NG S h a n LANG Ba o h u a
( S c h o o l o f El e c t r o n i c I n f o r ma t i o n Eng i n e e r i n g,Xi ’ a n Te c h n o l o g i c a l Un i v e r s i t y,Xi ’ a n 7 1 0 0 21 )
好 的调 速 功 能 , 又具 备 换 向 的特 点 。 无 刷 直 流 电 机 按 照 驱
实际磁通去逼近基准磁 通 , 由此决 定逆变 器 中电子器件 的 开关状态 , 进而产生 P WM 波 。同 S P WM 比较 S VP WM 具 有使 电机 转 矩 脉 动 小 、 噪声低、 直 流 电 压 利 用 率 高 的优 势_ 】 。而且 S VP WM 更适合于数字化控制系统 , 所 以本文 采用 S VP WM 实现无刷直 流电机 的正 弦波驱动 。 本文使用空间矢量 脉宽调 制[ 7 J ( S p a c e Ve c t o r Mo d u l a — t i o n , S VM) 方法来驱动 B L D C, 此调制方法的实现要 由以下 几个模块 组成 : 基于 d s P I C 3 0 F 3 0 1 0外 围硬件 电路 的设计 , 驱动 电路 及 逆 变 电路 的设 计 , 依 照 软件 框 图 在 MP L AB I D E v 8 . 9开发环境下 , 采 用 C语 言 与汇编语 言编写 系统 的 主程序与 中断子程序_ 1 ] 。
使用dsPIC30F DSC 实现PMSM 电机的正弦驱动

图 3:
0 A相 60
梯形波反电动势
120 180 240 300 0 60
B相
C相
根据需要,可使能或禁止其他设置或在应用中对其进行 修改。
背景知识
由于具有体积小、控制方便和高效率的特点,许多消费 者和工业应用都所采用 BLDC 电机。BLDC 电机愈来愈 多地出现在汽车应用中以取代传动带和液压系统,这样 可进一步增强功能和降低油耗。在高性能应用中,如机 床设备和低噪声风机应用中,平稳的转矩输出是至关重 要的。 由于采用非正弦分布的定子绕组,使得 BLDC 电机难以 应用在需要低转矩脉动和低噪声运行的场合。 如图 3 所 示,具有非正弦绕组分布的 BLDC 电机将产生梯形波的 反电动势。具有梯形波反电动势的 BLDC 电机专门设计 为采用与电机转子角位置同步的方波电压进行驱动。这 种控制方式通常称为六拍换相。 这里假定读者已充分了解六拍换相技术方面的知识,本 应用笔记将不再对该控制方式作进一步介绍。然而,有 关如何通过六拍换相控制 BLDC 电机的详细信息,可参 阅 Microchip 的其他应用笔记: • AN857 “Brushless DC Motor Control Made (DS00857) Easy ” • AN957 《使用 dsPIC30F2010 控制带传感器的 BLDC 电机》 (DS00957A_CN)
应用特性
• 使用空间矢量调制 (Space Vector Modulation, SVM)方法产生用于驱动 PMSM 电机各相的正弦 电流 • 正弦电压与 PMSM 电机转子位置同步 • 四象限运行,可实现正向、反向和制动运行 • 基于数字比例-积分-微分 (Proportional Integral Derivative, PID)控制的闭环转速控制 • 相位超前技术可实现更宽的调速范围 • 由 dsPIC® DSC 的 DSP 引擎实现小数数学运算
无刷直流电机控制系统的设计——毕业设计
无刷直流电机控制系统的设计——毕业设计学号:1008421057本科毕业论文(设计)(2014届)直流无刷电机控制系统的设计院系电子信息工程学院专业电子信息工程姓名胡杰指导教师陆俊峰陈兵兵高工助教2014年4月摘要无刷直流电机的基础是有刷直流电机,无刷直流电机是在其基础上发展起来的。
现在无刷直流电机在各种传动应用中虽然还不是主导地位,但是无刷直流电机已经受到了很大的关注。
自上世纪以来,人们的生活水平在不断地提高,人们在办公、工业、生产、电器等领域设备中越来越趋于小型化、智能化、高效率化,而作为所有领域的执行设备电机也在不断地发展,人们对电机的要求也在不断地改变。
现阶段的电机的要求是高效率、高速度、高精度等,由此无刷直流电机的应用也在随着人们的要求的转变而不断地迅速的增长。
本系统的设计主要是通过一个控制系统来驱动无刷直流电机,主要以DSPIC30F2010芯片作为主控芯片,通过控制电路采集电机反馈的霍尔信号和比较电平然后通过编程的方式来控制直流无刷电机的速度和启动停止。
关键词:控制系统;DSPIC30F2010芯片;无刷直流电机AbstractBrushless dc motor is the basis of brushless dc motor, brushless dc motor is developed on the basis of its. Now in all kinds of brushless dc motor drive applications while it is not the dominant position, but the brushless dc motor has been a great deal of attention.Since the last century, constantly improve the people's standard of living, people in the office, industrial, manufacturing, electrical appliances and other fields increasingly tend to be miniaturization, intelligence, high efficiency, and as all equipment in the field of motor is in constant development, people on the requirements of the motor is in constant change. At this stage of the requirements of the motor is high efficiency, high speed, high precision and so on, so is the application of brushless dc motor as the change of people's requirements and continuously rapid growth.The design of this system mainly through a control system to drive the brushless dc motor, mainly dspic30f2010 chips as the main control chip, through collecting motor feedback control circuit of hall signal and compare and then programmatically to control the speed of brushless motor and started to stop.Keywords: Control system; dspic30f2010 chip; brushless DC motor目录摘要 (I)Abstract (III)目录 (IV)1 引言 01.1 研究背景及意义 01.2 国内外研究现状 (1)1.3 设计任务与要求 (1)2 基本理论 (1)2.1 无刷直流电机的结构以及基本原理 (1)2.2 无刷直流电机的运行特性 (4)2.3 无刷直流电机的应用 (5)3 直流无刷直流电机控制系统的设计 (6)3.1 无刷直流电动机系统的组成部分 (6)3.2 无刷直流电机控制系统的设计 (8)4 直流无刷电机的电路设计 (9)4.1 开关电路的设计 (9)4.2 保护电路的设计 (9)4.3 驱动电路的设计 (10)4.4 反馈电路的设计 (10)4.5 电源电路的设计 (11)5 直流无刷电机控制系统的软件设计 (11)5.1 系统功能的实现 (12)5.2 软件流程图 (12)6 实物成果及展望 (13)致谢 (16)参考文献 (16)附录 (19)1 引言近年来随着微电子技术自动控制技术和新型永磁材料的发展,无刷直流电机的应用越来越广泛。
基于dsPIC30F2010的高性能航空陀螺逆变电源设计
值得 关 注 。
克服 了陀螺 电机 的电流和机械 冲击 , 延长 了使用 寿命 。
l 陀 螺 电源 工作 原 理及 组成
陀螺 电源采 用前 级 D / C和后 级 D / C相 串联 CD CA
针对 2 D 7V C供 电下 的 3 / 0 z 空 陀 螺 电 6V 4 0H 航 机, 以高 性能 l 6位 dPC0 2 1 控 制 器 为核 心 , sI3F 00微 采 用 电压 电流双闭环控 制策略 , 实现 了正 弦波 幅值和频 率 的精 准控 制和 陀螺 电机 的稳 定运 行 ; 采用 软 启 动方 法 ,
方法。实验表明: 输出的正弦波幅值精准 , 波形畸变小, 系统工作稳定。
关 键词 : 陀螺 电源 ;sI 3 F 0 0;P dPC 0 2 :N 6 T 8
文献 标识码 : A
文章 编号 :0 0— 8 9 2 1 ) 0— 0 3— 4 10 8 2 ( 0 1 1 0 5 0
v d d E p r n a e u t s o h t h mp i d f e sn a e i a c r t, a s itr o n e s s i e . x ei me t l s l h w t a e a l u eo i e w v s c u ae h sl sd s t n a d t y — r s t t h t e o i h
De in fa H ih r o m a c va in r nv r e we s d o sg o g Pe f r n eA i to Gy o I e t r Po r Ba e n ds C3 PI 0F2 01 0
基于dsPIC30F2010的交流变频空调设计
三相压 缩机
图 1.3 室外机控制单元结构示意图
6.室内室外通讯
内外机通讯是基于UART的异步半双工通信,由光电耦合器进行电气隔离 使用电流驱动,抗干扰能力强 只需增加一根通讯线和零线构成一个电流环 详细的通讯电路以及内外机通信协议可参考相关章节。
7.故障处理与保护运行
为了充分发挥变频空调的性能, 同时确保整机的工作可靠性, 本方案设计了多种故 障保护方式,并根据故障级别,针对致命故障能够关机保护,而针对非致命故障能 够进入保护运行方式。这些故障包括: 压缩机顶部/底部温度 外机控制单元能够实时监测压缩机温度, 当温度顶部温度超过系统设定极限值或底 部温度超过系统设定极限值一段时间, 室外控制单元会立即关闭压缩机。 当压缩机 温度过高时, 外机控制单元能够通过禁止压缩机升频或降频方式来降低温度以确保
驱动阵列
EEPROM
内外机通讯
图 1.2 室内机控制单元结构示意图
5.室外控制单元
室外控制单元的核心部分是控制变频器的工作以期对三相交流压缩机的控制。 室外 控制单元包括两个PCB板, 其中包括用于实现逆变的IPM模块以及室外单元的直流电 源提供板,或称功率板;另外的一个PCB板是外机系统的主控板,由dsPIC30F2010 以及相应的外围电路构成。图1.3 是室外控制单元的示意图,主要完成如下功能: 与室内控制板通讯,接收室内控制板命令及温度并返回外机的状态。 环境温度,盘管温度以及压缩机温度采集 控制室外风机的运行 采用VF方式,通过IPM模块对压缩机转速进行调整 制热/制冷控制 过流、过欠压、过温保护 采用LED显示工作状态及故障指示等 测试按键处理 电机启动电路 交流电源整流
1.方案特点
室内机采用Microchip PIC16F74 室外机采用Microchip dsPIC30F2010 压缩机控制采用变频控制方法 由SVPWM算法产生PWM信号 支持多种型号IPM模块 系统软件具有完善的故障检测和显示功能方便系统维护 参考压缩机型号-西安庆安YZB-20R 压缩机延时保护功能 防冷风、吹余热功能 具有自动、制冷、制热、除湿、通风等多种运行模式
基于dsPIC30F2010正交编码器接口的应用

关 键 词 :s I 0 2 1 正 交编 码 器接 口, d PC3 F 0 0, 旋转 编 码 器
Ab ta t s rc 来自T s pa hi perito c te h or c er ne fce n ds C3 F2 0, d nr nr du es h te y efEn od Itra i PI 0 01 an it odu es n h idu t t on rlte n c i te n sr o c to h i・ y si h de t e appi t n t e ds C3 2 d e ole t e c n t g f otr En od d e ie l i h PI 0F 01 an rv v h on eci o R a ca o 0 n y c eran ral s. z
存 在 精度 较 低 , 比较 粗糙 的 问题 , 而旋 转 编 码 器 是 一 种脉 冲数 字 输 出 的器 件 , 过 采集 旋 转 编 码 器 输 出得 到设 定 值 的 数 字 量 , 通 精 度 较 高 , 通 常 都 需 要用 两 个 独 立 的计 数 器 来 记 录 , 随着 数 字 但 但 信 号控 制 器 d PC3 F 0 0的 出 现 ,其 特 有 的 正交 编码 器 接 口 sI 021 ( 1 得 旋转 编 码 器 连接 变 得 非 常简 单 方 便 。 QE) 使
一
般 有 三个 输 出 : 相 、 相 和 索 引 ( E ) 如 果 A 相 超 前 B A B I ND X ,
相 , 么旋 转 编 码 器 旋转 方 向是 正 向 , 那 如果 A 相 落后 B相 , 么 那 旋 转 编码 器 旋 转 方 向是 反 向 的 , DE J N ×索 引信 号 称 为索 引脉 冲 ,
基于DSPIC无刷电机无传感器控制系统的分析和设计
o d. Ca r r i e d o n t h e t h o r o u g h a n a l y s i s i n v i e w o f t h e r e l a t i v e l y ma t u r e me t h o d o f ba c k EMF,t h e s c h e me o f h a r d wa r e c i r c u i t a n d s o f t wa r e s c h e me ba s e d o n DS PI C wa s d e s i g n e d,g a v e t wo c a s e s wi t h z e r o — c r o s s i n g d e t e c - t i o n t h e h i g h s p e e d,a n d l o w s p e e d.Th e me t h o d c a n o v e r c o me t h e l o w s pe e d s e n s o r l e s s BLDC d i f ic f u l t t o d e — t e c t z e r o p r o b l e m ,f u r t h e r e x p a n d t h e a p p l i c a t i o n i f e l d o f b r u s h l e s s DC mo t o r .I n t h i s pa p e r ,t h e s o l u t i o n t o t h e d e s i g n p r o b l e m o f s e n s o r l e s s BL DC c o n t r o l s y s t e m ,h a s i mp o ta r n t e n g i n e e in r g p r o s pe c t . Ke y wo r ds:DS P I C b r u s h l e s s c o n t r o l ;b a c k- EMF z e r o - c r o s s i n g d e t e c t i o n;s e n s o r l e s s c o n t r o l ;BLDC
基于dsPIC30F的数字电源的设计与制作
基于dsPIC30F的数字电源的设计与制作
控制板电源:反激式开关电源,输出4 组独立电源
驱动形式:采用250 功率驱动光藕,+15V,-3.3V 负电压
可驱动IGBT:MOSFET
输出方式:单级性,H 桥工频变压器输出。
反馈方式:交流采样反馈.
软件设计: 采用SVPWM,单相空间矢量调制,优化开关控制时序。
控制思想: 内模重复控制原理+电压定时滞环+PI 控制技术。
设计结果: 基本无频率误差,空载和满载电压相差不超过2%,空载和满载顺间转换电压相差不超过2%,并能在2 个周期内定。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
用dsPIC30F3010实现无刷直流电动机正弦波驱动

用dsPIC30F3010实现无刷直流电动机正弦波驱动
孟姗;郎宝华
【期刊名称】《计算机与数字工程》
【年(卷),期】2013(041)009
【摘要】针对具有霍尔传感器的无刷直流电动机,以dsPIC30F3010为核心控制芯片,绘制出系统的总体设计框图,同时采用空间矢量调制法生成六路SVPWM信号,从而实现无刷直流电机的正弦波驱动.实验结果表明采用空间矢量脉宽调制法,可以实现正弦波驱动无刷直流电机的平稳运行.
【总页数】4页(P1538-1540,1543)
【作者】孟姗;郎宝华
【作者单位】西安工业大学电子信息工程学院西安710021;西安工业大学电子信息工程学院西安710021
【正文语种】中文
【中图分类】TM33
【相关文献】
1.无刷直流电动机的正弦波电流驱动方法 [J], 朱信舜;林明耀;刘文勇
2.正弦波驱动无刷直流电动机的电势系数 [J], 王宗培;韩光鲜;葛新
3.正弦波驱动的无刷直流电动机控制系统设计 [J], 陈风凯;黄开胜;陈治宇;田燕飞;何建源
4.基于BD6209FS正弦波驱动的无刷直流电动机控制系统 [J], 马吉富;杜荣法
5.基于dsPIC30F2010的无刷直流电动机正弦波驱动系统设计 [J], 马瑞卿;李颖;刘冠志
因版权原因,仅展示原文概要,查看原文内容请购买。
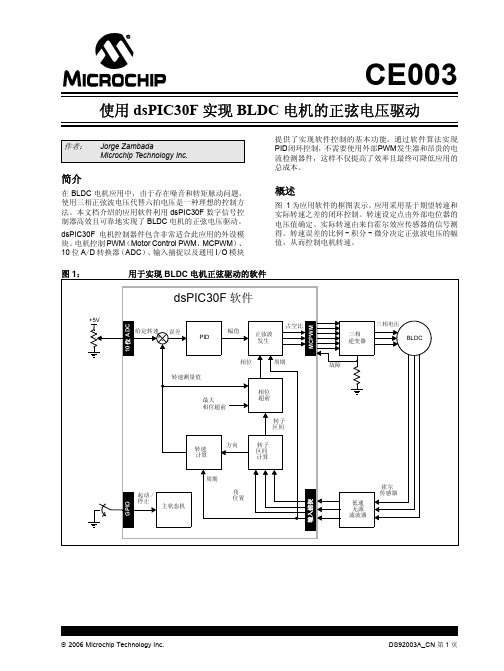
使用dsPIC30F 实现BLDC 电机的正弦电压驱动 92003a_cn
此应用使用的硬件是 PICDEM™ MC LV 开发 板。
PICDEM™ MC LV Development Board User's Guide (DS51554)提供了关于使用此开发板的详细说明。您 可以通过参考编号 DM183021 从 Microchip 网站定购此 开发板。用于开发的电机为 Hurst Manufacturing NT Dynamo™ 的标准产品。 Hurst 电机也可通过参考编号 AC300020 通过 Microchip 网站定购。
转子区间计算
角位置的测量值用于产生一个定义为 Rotor Sector 的输出值。这个值在计算相位超前时用到。
同样,将角位置的测量值与其最后一次测量值相比较来 决定电机的旋转方向。方向在转速计算时用到。
转速计算
转速计算使用从输入捕捉模块得到的周期测量值以及从 转子区间计算得到的方向值来以有符号格式计算电机转 速。在此计算中,周期测量值除以一个常量值,然后添 加符号来表示电机的转向。此计算结果为测量转速值, 用于确定转速误差。
AmpLab、 FilterLab、 Migratable Memory、 MXDEV、 MXLAB、SEEVAL、SmartSensor 和 The Embedded Control Solutions Company 均为 Microchip Technology Inc. 在美国的 注册商标。
正弦波调制计算
MCPWM模块将正弦波发生器的三个占空比输入转换为 六个正弦波调制的方波信号。经调制的方波信号驱动外 部逆变器的晶体管,产生电机的驱动电压。
如果发生过流,外部限制比较器将产生一个故障信号。 此故障信号使MCPWM模块自动关闭所有输出以保护外 部硬件。
软件及开发工具
基于dsPIC30F3010实现无刷直流电机的无传感器控制

基于dsPIC30F3010实现无刷直流电机的无传感器控制
基于dsPIC30F3010实现无刷直流电机的无传感器控制
1 引言
无刷直流电机既具有交流电机结构简单、运行可靠、维护方便等优点,又具有直流电机运行效率高、无励磁损耗、调速性能好的特性,因此在各行业中的应用日益广泛。
无刷直流电机是一种特殊的永磁同步电机,传统的无刷直流电机大多数采用位置传感器确定转子位置,并据此控制驱动电路换相。
由于位置传感器的存在,增加了电机体积和成本,降低了电机可靠性,限制了某些场合的应用。
本文给出一种基于反电动势过零点检测法控制无刷直流电机的实现方法,该方法所需硬件简单。
软件功能强大。
2 无刷直流电机的结构
无刷直流电机由电机本体、转子位置检测电路以及电子开关电路3 部分组成。
其示意图如图1 所示。
电子开关电路主要作用是控制电机本体定子各相绕组的通电顺序和时间,主要由功率管、驱动电路以及转子位置信号处理模块构成。
转子位置检测电路主要作用是实时检测转子位置,为换相提供依据。
电机本体由定子线圈绕组与永磁转子构成。
电机本体结构如图2 所示。
3 无刷直流电机工作原理
有刷直流电机通过电刷实现转子绕组的换相,产生旋转磁场,且定子磁场与转子磁场方向垂直,从而使转子旋转。
无刷直流电机工作过程与此类似,不同之处在于通过电子开关电路控制定子换相,使定子绕组产生旋转磁场,使得永磁转子旋转。
由此可见,无刷直流电机中,转子位置非常重要,否则不能准确控制换相时间,导致电机不能输出最大转矩,甚至不能运转。
一种基于dsPIC的无刷电动机调速系统设计
一种基于dsPIC的无刷电动机调速系统设计
刘汉忠;李宁;赵涛
【期刊名称】《微电机》
【年(卷),期】2008(041)010
【摘要】介绍了无刷直流电动机数学模型,提出了基于dsPIC(数字信号控制器)的数字控制系统方案,详细介绍了调速系统的主要硬件电路以及软件设计方案,最后对调速系统进行建模、仿真,得到了转速电流仿真曲线,系统实际运行也同样得到转速电流曲线及电流波形.通过对比分析,实际运行转速电流曲线与理论曲线一致.
【总页数】3页(P98-100)
【作者】刘汉忠;李宁;赵涛
【作者单位】南京工程学院,自动化学院,南京,211167;南京工程学院,自动化学院,南京,211167;南京工程学院,自动化学院,南京,211167
【正文语种】中文
【中图分类】TM36+1
【相关文献】
1.基于dsPIC30F6014A的电机变频调速系统设计 [J], 王彪
2.一种基于磁场定向控制的电机交流调速系统设计 [J], 胥良;张丛;张宁
3.一种基于SVPWM控制的永磁电机变频调速系统设计与实现 [J], 荆艳强
4.一种基于PLC控制变频器三相电机调速控制系统设计 [J], 吴宗;陈奕旋
5.一种基于dsPIC30F6014A单片机的荧光测量系统设计 [J], 武志翔;王吉松;李建超;邓琥
因版权原因,仅展示原文概要,查看原文内容请购买。
基于dsPIC30F2010微处理器的无位置传感器直流无刷电机控制系统的开题报告
基于dsPIC30F2010微处理器的无位置传感器直流无刷电机控制系统的开题报告1.选题背景随着技术的不断发展,无刷电机越来越得到广泛的应用,尤其是在工业、军事、医疗等领域。
在控制系统中,基于无刷直流电机的控制系统是一种常见的控制方式,通过合理的控制方法可以使电机高效稳定地运转。
在以往的设计中,通常需要使用位置传感器来测量电机的旋转角度,并且通过控制电机电流控制转子转动。
但是,位置传感器的使用会增加系统的成本和复杂度。
因此,无位置传感器直流无刷电机控制系统的设计显得尤为重要。
2.研究目的和意义本次设计旨在开发一种基于dsPIC30F2010微处理器的无位置传感器直流无刷电机控制系统。
主要探究以下几方面内容:1. 无位置传感器直流无刷电机控制系统的原理和基本结构2. dsPIC30F2010微处理器的基本功能和控制功能3. 采用无位置传感器控制电机时的控制策略4. 系统的仿真和实验验证本次设计意义在于降低无刷电机控制系统的成本和复杂度,提高电机控制的稳定性和效率。
3.研究内容和方法设计内容主要包括:1. 硬件设计部分,包括电路原理图、PCB设计2. 软件设计部分,包括微处理器程序设计和仿真验证研究方法主要包括:1. 硬件设计部分,采用Protel软件设计电路原理图并完成PCB布局设计2. 软件设计部分,采用MPLAB软件对dsPIC30F2010微处理器进行程序设计,利用Proteus软件搭建仿真平台进行仿真分析。
4.预期成果预期的主要成果包括:1. 设计开发出一种基于dsPIC30F2010微处理器的无位置传感器直流无刷电机控制系统2. 完成系统的仿真分析和实验验证,验证该控制系统的控制效果和稳定性3. 系统的性能指标能够达到一定的水平和要求。
5.进度安排本次设计的进度安排如下:1. 第一周:调研和文献阅读2. 第二周:软件环境的搭建和学习3. 第三周:电路设计4. 第四周:PCB设计5. 第五周:程序设计和仿真6. 第六周:系统调试和实验验证7. 第七周:实验数据处理和成果总结8. 第八周:论文撰写和答辩准备6.参考文献[1] 胡伟, 陈静仪. 无位置传感器永磁同步电机驱动控制系统的研究与设计 [J]. 科技创新导报, 2014(4):58-60.[2] 陈娟, 陈琦. 基于dsPIC30F2010的BLDC电机中断控制的研究[J]. 电子科技大学学报, 2011, 40(6):962-968.[3] 王海洋, 张宇. 采用四轴无刷电机的飞行控制系统设计研究 [J]. 测控技术, 2012, 31(3):119-121.。
基于dsPIC30F单片机的电动机综合保护装置设计的开题报告
基于dsPIC30F单片机的电动机综合保护装置设计的开题报告一、题目基于dsPIC30F单片机的电动机综合保护装置设计二、研究背景电动机在工业生产中占有非常重要的地位,但是由于电动机的使用条件和使用环境的不同,使得电动机也存在着各种各样的故障和问题。
为了保障电动机的安全运行,需要对电动机进行监控和保护。
电动机保护装置可以实时监测电动机运行状态,对电动机的过载、欠载、短路、断相、过热等故障进行预警和报警,并采取保护措施,以避免因故障引起的生产事故和损失。
因此,电动机综合保护装置的研究和设计具有重要的理论研究和应用价值。
三、研究目的本研究旨在设计和实现一款基于dsPIC30F单片机的电动机综合保护装置,主要包括以下方面:1. 对电动机进行电气参数的实时监测和测量,包括电压、电流、功率等参数。
2. 综合分析电动机运行状态,实现对电动机过载、欠载、短路、断相、过热等故障的预警和报警。
3. 实现对电动机故障的判断和诊断,并采取相应的保护措施,包括断电、报警等。
4. 实现与上位机通信功能,将电动机的运行状态、故障信息等数据传输到上位机,方便远程监测和管理。
四、研究方法本研究采用以下研究方法:1. 系统性分析电动机的工作原理和故障特点,确定电动机综合保护装置的主要功能和设计要求。
2. 对dsPIC30F单片机的基本特性进行了解和分析,运用C语言编程软件,开发电动机综合保护装置的软件。
3. 设计电路板和外部传感器,实现电动机电气参数的实时测量和监测。
4. 对电动机的故障特点进行分析,采用保护算法、通信协议等技术手段进行设计、实现电动机综合保护装置。
五、预期研究成果本研究的预期成果包括:1. 设计出一款基于dsPIC30F单片机的电动机综合保护装置。
2. 实现电动机电气参数的实时监测和测量,包括电压、电流、功率等参数。
3. 综合分析电动机状态,实现对电动机过载、欠载、短路、断相、过热等故障的预警和报警。
4. 实现与上位机通信功能,将电动机的运行状态、故障信息等数据传输到上位机,方便远程监测和管理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
11 收稿日期:2009-12-01基于dsPIC30F2010的无刷直流电动机正弦波驱动系统设计马瑞卿,李 颖,刘冠志(西北工业大学,陕西西安710129)摘 要:针对具有霍尔位置传感器的无刷直流电动机,以dsP I C30F2010为核心控制单元,给出了一种正弦波驱动无刷直流电动机的新方法。
根据三相Hall 位置信号所包含的位置和速度信息,获得正弦调制波的周期和幅值,并利用不对称规则采样法生成六路SP WM 信号。
仿真和实验结果显示该方法能够在低成本的前提下,实现正弦波驱动无刷直流电动机平稳运行。
关键词:dsP I C30F2010;无刷直流电动机;Hall 位置传感器;正弦脉宽调制中图分类号:T M 33 文献标识码:A 文章编号:1004-7018(2010)08-0011-04D esi gn of BLDCM S i n e -W ave D r i v i n g Syste m Ba sed on dsP IC30F2010MA R ui -qing,L I Ying,L I U Guan -zhi(Northwestern Polytechnical University,Xi’an 710129,China )Abstract:A i m ing at BLDC M with a Hall r ot or positi on sens or,a ne w method of sine -wave driving BLDC M was p r o 2vided,in which dsP I C30F2010was regarded as the core contr ol unit .The peri od and a mp litude of the modulating sine wave were obtained according t o the positi on and vel ocity infor mati on included in the three -phase Hall signals .Then using the a 2sy mmetry regular samp ling,six sine pulse width modulati on (SP WM )signals were generated .Si m ulati on and experi m ental results show that this method can make BLDC M driven by SP WM stably under the conditi on of l ow cost .Key words:dsP I C30F2010;BLDC M;Hall positi on sens or;SP WM0引 言无刷直流电动机以其良好的性能和长久的使用寿命在军事、工业场合得到广泛应用。
方波驱动无刷直流电动机电路简单,可选用廉价的转子位置传感器,因而驱动成本较低。
而正弦波驱动无刷直流电动机在保证机械特性和转矩特性不变的前提下,具有更低的转矩纹波、更小的音频噪声、更优良的控制性能。
现有的正弦波驱动方法需要高分辨率的转子位置传感器(如光电编码器),使得系统设计复杂、成本较高。
本文针对具有三相Hall 位置传感器的无刷直流电动机,以dsP I C30F2010为核心控制单元,设计了一种正弦脉宽调制波(SP WM )驱动无刷直流电动机的控制系统。
该系统利用三相霍尔位置信号,通过合理的软件算法,计算出正弦调制波的周期和幅值,并采用不对称规则采样法的数学模型生成六路SP WM 信号,通过CP LD 进行故障综合后控制三相全桥逆变器工作,实现无刷直流电动机的正弦波驱动。
用Hall 转子位置传感器取代了传统正弦波驱动中使用的高分辨率转子位置传感器,这种方法在保证正弦波驱动优良特性的前提下,有效降低了正弦波驱动的成本,将为正弦波驱动的应用拓展更大的空间。
1系统硬件设计以3对极三相星形六状态工作的无刷直流电动机为控制对象,原理框图如图1所示。
图1 正弦波驱动系统原理框图1.1控制单元设计本系统以微芯(M icr ochi p )公司生产的dsP I C30F2010为核心控制单元。
dsP I C30F2010具有6个速率为1M s/s 的A /D 转换器、1kb 的非易失性EEPROM 数据存储器、4个输入捕获通道以及6路独立输出的电机控制专用P WM 通道[1],是一款无刷直流电动机控制的专用数字信号处理芯片。
dsP I C30F2010外围电路如图2所示,电位计12 R105用于选择给定转速,通过隔离电路反馈到输入捕获通道的三相霍尔位置信号可实时计算正弦调制波的周期和反馈转速。
给定转速和反馈转速的差值经过P I D调节后对正弦波周期和幅值进行控制。
图2 dsP I C30F2010外围电路1.2电机起动在无刷直流电动机起动时,霍尔位置信号频率很低,容易引起周期计数器的溢出而使得周期计算失准,影响反馈速度的测量。
因此,在电机起动之初,系统用以SG1525为核心的P WM生成单元,生成两路互补的P WM信号,通过CP LD与三相Hall位置信号进行逻辑综合后,控制三相全桥逆变器的六只功率管的导通和关断,实现无刷直流电动机方波起动。
当反馈转速测量值nmea达到100r/m in时,切换到正弦波驱动。
1.3逻辑单元设计系统上电后,默认I nf信号为低电平,电机按照方波模式起动,以EP M7064为核心的逻辑单元综合由P WM生成单元发出的两路互补的P WM信号、三相Hall位置信号,正反转信号、故障信号,发出六路P WM信号,无刷直流电动机进行开环方波起动。
同时,控制单元实时计算正弦调制波的周期和幅值,并通过不对称规则采样法生成六路SP WM信号,但由于CP LD此时将正弦波驱动通道封锁而未执行正弦波驱动。
当控制单元计算的反馈转速nmea达到一定值后(此值在单片机程序中已经预置为约100r/m in,并且可调),dsP I C30F2010将I nf信号置高,通知EP M7064封锁两路P WM输入,打开六路SP WM输入通道,并通过综合SP WM信号、Hall位置信号和故障信号,使系统切换到转速闭环的SP WM驱动模式。
从方波起动到正弦波驱动的过程约几十毫秒。
1.4驱动单元设计驱动单元由I R2130和少量的外围电路构成,用于将逻辑单元的输出信号进行放大,以控制三相逆变器的六只功率管按相应的规律导通和关断。
另外,I R2130可通过采样电阻R2(0.22Ω/2W)实时采样逆变器直流母线的电流,并经过内部比较器与内置的0.5V基准电压进行比较。
如果采样电流经放大后的电压信号大于基准电压,则I R2130的8脚变低,输出过流保护信号,发送给逻辑单元对系统进行故障综合与保护。
2系统软件设计控制单元软件设计如图3所示。
图3 控制单元软件原理框图2.1正弦调制波周期、幅值的计算用C编写的dsP I C30F2010程序,将Hall B对应的捕获口P B设置为双沿捕捉模式,将相邻跳变沿时间间隔存放于变量TM中,其值对应正弦调制波周期的半值,并在每个TM开始时将定时器清零,以免计数器发生溢出[3]。
如果对dsP I C30F2010的系统时钟(20MHz)进行64分频,则每个计数值代表3.2μs。
所以有:T M=N×3.2(1)式中:N为捕获计数器所计的脉冲数。
由此可对正弦调制波周期半值TM进行实时计算,由于系统采用的无刷直流电动机是3对极,因此每个TM代表16机械周期。
则13 n mea =60T M ×6=60N ×3.2×10-6×6(2) 当n mea <n ref(n ref 为转速给定,由A /D 模块读出)时,电机需要加速,应增大SP WM 占空比,减小SP WM 的周期;而当n mea >n ref 时,电机需要减速,相应减小SP WM 的占空比,增大SP WM 的周期。
由于正弦调制波的幅值变量决定了输出SP WM 信号占空比的大小,因而给定转速n ref 与反馈转速n mea 的差值,经过10m s 执行一次的P I D 调节后输出的合成控制量,可以作为正弦波幅值的给定控制量用于补偿转速误差[1-3]。
转子区间计算提供电机当前转向,用于确定转速计算值的正负。
每60°电角度划分为一个转子区间,与相应的三相霍尔信号逻辑组合对应,在程序中分别用0~5进行转子区间标识,并用当前区间与上一区间进行比较的方式确定当前转向,如表1所示。
表1 当前转向的计算上一区间012345012345当前区间123450501234当前转向反转反转反转反转反转反转正转正转正转正转正转正转2.2六路SP WM 信号的生成在获得正弦调制波周期和幅值后,设载波比N =36(为保证三相SP WM 波对称,N 最好选3的倍数),根据不对称规则法的采样原理有[4]:t A K =T C4M sin (k πN-2π3)+1t B K =T C4M sin (k πN)+1k =(0,…,N -1)t CK =T C4M sin (kπN+2π3)+1(3)式中:M 为正弦波与三角波的幅值之比;N 为正弦波与三角波的周期之比;t A k 、t B k 、t Ck 为SP WM 开关时刻;T C 为三角载波周期(s )。
实时计算得到的T M 值和10m s 执行一次的P I D 运算结果将分别用于计算和更新式(3)中的T C 和M 。
将式(3)计算得到的三相SP WM 信号每个正弦调制波正半周期内36个脉冲的开关时刻制表存于EEPROM 中,以备查用。
比较定时器以实时计算的T C2值为周期,并设置为双更新连续增减计数模式,使得在定时器下溢和周期匹配时都产生中断,在中断服务子程序将t A k 、t B k 、t Ck 分别写入三个占空比寄存器,P WM 输出设置为低有效(I R2130驱动输入为低有效)。
当计数器中的数与三个占空比寄存器中任一个数匹配时,对应相输出低电平。
当B相开关时刻表中最后一个开关时刻被写入占空比寄存器时(即k =N -1),封锁当前输出通道SP WMBH (SP WMBL ),切换到SP WMBL (SP WM 2BH )输出,A 、C 相也相同,这样便得到上下管交替导通180°的六路SP WM 信号。
3仿真和实验3.1仿真结果及分析根据上述SP WM 驱动原理,在典型正弦波无刷直流电动机仿真模型的基础上,结合P WM 生成模块、控制模块、三相全桥逆变器模块,构建了基于Si m ulink 的正弦波驱动BLDC M 系统仿真模型,如图4所示。