弹性力学 第二章应力状态理论
弹性力学 第二章 应力分析

ν
∫∫ ∫∫∫ eijkr j T k dS + eijk rj Fkdv = 0
S
V
ν
因为Tk = σ rkν r ,所以由 Gauss 公式有
∫∫ ∫∫∫( ) eijkr jσ rkν r dS =
eijk rjσ rk ,r dv
S
V
又因为
rj ,r
= δ jr
=
∂x j ∂xr
故使上式成为
方程(2.5.3)式有根,应有三个根,即σ1 ,σ 2 ,σ 3 ,称为主应力,(2.5.3) 和 (2.5.4)式可重写成
(σ − σ1 )(σ − σ 2 )(σ − σ 3 ) = 0
J1 = σ1 + σ 2 +σ 3
J 2 = σ 1σ 2 + σ 2σ 3 + σ 3σ 1
J 3 = σ1σ 2σ 3
消去公因子得 (2.3.1a) 式的第二式,同理由另两个方向的平衡得到其余的两式,
∂σ xx ∂x
+
∂σ yx ∂y
+
∂σ zx ∂z
+
X
=
0
∂σ xy ∂x
+
∂σ yy ∂y
+
∂σ zy ∂z
+Y
=0
∂σ xz ∂x
+
∂σ yz ∂y
+
∂σ zz ∂z
+
Z
=0
或
(2.3.1a)
2
对应σ 2 , 可求出 ν j = a j − ib j ,因此 (4) 式中的因子
( )( ) 1 2
② 积分方程法 上述的平衡方程也可用积分方程的方法得到。作用在被分割出物体上的合力为零的矢量 方程为
2 第二章 应力和应变

第二章应力和应变地震波传播的任何定量的描述,都要求其能表述固体介质的内力和变形的特征。
现在我们对后面几章所需要的应力、应变理论的有关部分作简要的复习。
虽然我们把这章作为独立的分析,但不对许多方程进行推导,读者想进一步了解其细节,可查阅连续介质力学的教科书。
三维介质的变形称为应变,介质不同部分之间的内力称为应力。
应力和应变不是独立存在的,它们通过描述弹性固体性质的本构关系相联系。
2.1 应力的表述——应力张量2.1.1应力表示考虑一个在静力平衡状态下,均匀弹性介质里一个任意取向的无限小平面。
平面的取向可以用这个平面的单位法向矢量nˆ来规定。
在nˆ方向的一侧施加在此面单位面积上的力叫做牵引力,用矢量),,()ˆ(zyxtttnt=表示。
在nˆ相反方向的另一侧施加在此面上的力与其大小相等,方向相反,即)ˆ()ˆ(ntnt-=-。
t在垂直于平面方向的分量叫做法应力,平行于平面方向的分量叫做剪应力。
在流体的情况下,没有剪应力,nptˆ-=,这里P 是压强。
上面的表示这是一个平面上的应力状况,为表示固体内部任意平面上的应力状态,应力张量τ在笛卡尔坐标系(图 2.1)里可以用作用于xyxzyz,,平面的牵引力来定义(:ˆˆˆ()()()ˆˆˆ()()()ˆˆˆ()()()xx xy xzx x xy y y yx yy yzz z z zx zy zzt x t y t zt x t y t zt x t y t zττττττττττ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(2.1)在右式的表示中,第一个下角标表示面的法线方向,第二个下角标表示该面上应力在该坐标轴上的投影。
图2.1 在笛卡尔坐标系里描述作用在无限小立方体面上的力的牵引力矢量)ˆ(),ˆ(),ˆ(z t y t xt 。
应力分量的符号规定如下:对于正应力,我们规定拉应力为正,压应力为负。
对于剪应力,如果截面的外法线方向与坐标轴一致,则沿着坐标轴的正方向为正,反之为负;如果截面方向与外法线方向相反,则沿着坐标轴反方向为正。
第二章:弹性力学基本理论及变分原理

第二章 弹性力学基本理论及变分原理弹性力学是固体力学的一个分支。
它研究弹性体在外力或其他因素(如温度变化)作用下产生的应力、应变和位移,并为各种结构或其构件的强度、刚度和稳定性等的计算提供必要的理论基础和计算方法。
本章将介绍弹性力学的基本方程及有关的变分原理。
§2.1小位移变形弹性力学的基本方程和变分原理在结构数值分析中,经常用到弹性力学中的定解问题及与之等效的变分原理。
现将它们连同相应的矩阵形式的张量表达式综合引述于后,详细推导可参阅有关的书籍。
§2.1.1弹性力学的基本方程的矩阵形式弹性体在载荷作用下,体内任意一点的应力状态可由6个应力分量表示,它们的矩阵表示称为应力列阵或应力向量111213141516222324252633343536444546555666x x y y z z xy xy yz yz zx zx D D D D D D D D D D D D D D D D D D D D D σεσεσετγτγτγ⎧⎫⎡⎤⎧⎫⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎪⎪=⎢⎥⎨⎬⎨⎬⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎩⎭⎣⎦⎩⎭ (2.1.1) 弹性体在载荷作用下,将产生位移和变形,弹性体内任意一点位移可用3个位移分量表示,它们的矩阵形式为[]T u u v u v w w ⎧⎫⎪⎪==⎨⎬⎪⎪⎩⎭(2.1.2)弹性体内任意一点的应变,可由6个应变分量表示,应变的矩阵形式为x y Tz xy z xy yz zx xy yz zx εεεσεεεγγγγγγ⎧⎫⎪⎪⎪⎪⎪⎪⎪⎪⎡⎤==⎨⎬⎣⎦⎪⎪⎪⎪⎪⎪⎪⎪⎩⎭(2.1.3)对于三维问题,弹性力学的基本方程可写成如下形式 1 平衡方程0xy x zx x f x y z τστ∂∂∂+++=∂∂∂ 0xy y zy y f xyzτστ∂∂∂+++=∂∂∂0yz zx zz f x y zττσ∂∂∂+++=∂∂∂ x f 、y f 和z f 为单位体积的体积力在x 、y 、z 方向的分量。
弹性力学第二章 应力理论

主应力 & 应力不变量
应力1、第二主应力2和第三主应力3 ,且
1 2 3
Chapter 3.3
主应力 & 应力不变量
主应力的性质
3I12I2I30
➢ 不变性 由于特征方程的三个系数是不变量,所以作为特征 根的主应力及相应主方向都是不变量。
1, 2, 3
1, 2 , 3
➢ 实数性 即特征方程的根永远是实数。
Chapter 3.3
主应力 & 应力不变量
➢ 极值性
主应力1和3是一点正应力的最大值和最小值。
在主坐标系中,任意斜截面上正应力的表达式:
n==ijij =11 222 233 2
= 1 (1 2 )2 2 (2 3 )3 2 1 = (1 3 )1 2 (2 3 )2 2 3 3
Chapter 3.3
e3
11
e1
32
31
23
13
22
12 21
x2 e2
x1
Chapter 3.1
外力、内力与应力
把作用在正面dSi上的应力矢量沿坐标轴正向分解得:
(1) 11e1 12e2 13e3 1jej
(2) 21e1 22e2 23e3 2jej
(3) 31e1 32e2 33e3 Nhomakorabea 3jej x3 33
主应力 & 应力不变量
x l xym xzn 0
xyl y m yzn 0
xzl yzm z n 0
由于l2m2n21,所以要有非零解,则上述三
个方程必须是线性相关的,亦即系数行列式为零:
x xy xz
xy y
yz
xz yz 0 z
弹性力学 应力状态
Fby 0
ij , i Fbj 0
§2.3 平衡方程5
考察主矩为零条件:
M
x
O ;
yz 1 1 yz y dy dxdz 2 dy yz dxdz 2 dy zy 1 1 zy dz dxdy dz zy dxdy dz 0 z 2 2
§2.4 应力状态1
•应力状态对于结构强度是十分重要的。
•为了探讨各个截面应力的变化趋势,确定可以 描述应力状态的应力参数。 如果应力张量能够描述一点的应力状态,则 1. 应力张量可以描述其它应力参数
——斜面应力公式; 2. 坐标变换与应力张量关系 ——转轴公式。
§2.4 应力状态2
应力矢量与应力分量的关系
这就是著名的哥西公式,又称为斜面应力公式。它说明; 过一点三个互相垂直微分面上的九个应力分量完全确定了该点 的应力状态。这样,我们就可以把要了解各点应力状态的问
题,转化为去求各点的九个应力分量的问题。
§2.4 应力状态6
应力矢量不仅随位置改 变而变化,而且随截面 方位改变而变化。 同一点由于截面的法线 方向不同,截面上的应 力矢量也不同。
第二章 应力状态
弹性力学的研究对象为三维弹性体, 分析从微分单元体入手, 本章的任务就是从静力学观点出发,讨 论一点的应力状态,建立平衡微分方程 和面力边界条件。
目录
§2.1 §2.2 §2.3 §2.4 §2.5 §2.6 §2.7 体力和面力 应力与应力张量 平衡微分方程 应力状态的描述 应力边界条件 主应力与应力主方向 应力球张量和球应力偏张量
§2.3 平衡方程2
主矢为零:
微分平行六面体单元
F 静力平衡条件:
弹性力学第2章应力分析
V 0 V
z
z
fz
V F
M
fx
o
F fy
y
x
(a)
pz
P
A P
py
M
px
o
y
x
(b)
图 2-1
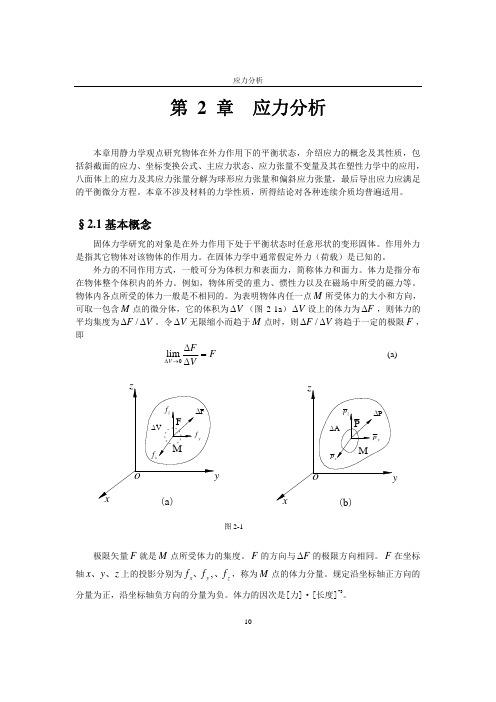
极限矢量 F 就是 M 点所受体力的集度。 F 的方向与 F 的极限方向相同。 F 在坐标 轴 x、y、z 上的投影分别为 f x、f y ,、f z ,称为 M 点的体力分量。规定沿坐标轴正方向的
分量为正,沿坐标轴负方向的分量为负。体力的因次是[力]·[长度]-3。
12
应力分析
向者为负。按此规定,正应力符号与材料力学中使用的拉应力为正、压应力为负规定是一 致的。切应力的符号与材料力学规定不完全一致,图 2-4 所有应力分量均按正的画出。
由此可见,在物体任意 M 点处的应力分量共有九个,其中有三个正应力分量,六个切
部分在 m m 面上将有内力相互作用。移去 B x
部分,则 B 部分对 A 部分的作用以内力表示。围
图 2-2
绕 M 点取一微分面积ΔA,作用于ΔA 上的内力
为ΔQ,则内力的平均集度为ΔQ/ΔA。令ΔA 无限缩小而趋于 M 点,则在内力连续分布的 条件下ΔQ/ΔA 将趋于一定的极取 p ,即:
lim Q p
§2.1 基本概念
固体力学研究的对象是在外力作用下处于平衡状态时任意形状的变形固体。作用外力
是指其它物体对该物体的作用力。在固体力学中通常假定外力(荷载)是已知的。
外力的不同作用方式,一般可分为体积力和表面力,简称体力和面力。体力是指分布
在物体整个体积内的外力。例如,物体所受的重力、惯性力以及在磁场中所受的磁力等。
弹塑性力学 第02章应力状态理论

b
z
b
z
σy
a
τ yz τ zy
τ yx τ xy σ x τ xz
o
pz
c
τ zx
y
a
o
px
py
c
y
x
σz
x
于是可得 同理可得
p x = σ x l + τ xy m + τ xz n
p y = τ yx l + σ y m + τ yz n pz = τ zx l + τ zy m + σ z n
f sj = σ ij ni
上列三个方程给出了应力和面力之间的关系,称 为应力边界条件 或面力边界条件。
⎛ ∂ ui ⎞ ⎟ = σ ij , j + Fbi = 0⎜ ρ 2 ⎟ ⎜ ∂t ⎠ ⎝
2
描述弹性体 内部的平衡
f sj = σ ij ni
描述弹性体表面的平衡
显然,如已知应力分量满足平衡微分方程和应 力边界条件,则物体是平衡的;反之,如物体是平 衡的,则应力分量必须满足平衡微分方程和应力边 界条件。 需要指出的是,这里所指的平衡,仅仅是静力 学上可能的平衡,未必是物体实际存在的平衡。实 际的平衡,还要考虑物体变形的连续性条件。
平 衡 微 分 方 程
平衡微分方程,又称纳维方程
⎛ ∂σ x ∂τ yx ∂τ zx ∂ 2u ⎞ + + + Fbx = 0⎜ =ρ 2 ⎟ ⎜ ⎟ ∂x ∂y ∂z ∂ t ⎝ ⎠ ∂τ xy ∂σ y ∂τ zy ⎛ ∂ 2v ⎞ + + + Fby = 0⎜ =ρ 2⎟ ⎜ ⎟ ∂x ∂y ∂z ∂ t ⎝ ⎠ ⎛ ∂τ xz ∂τ yz ∂σ z ∂2w ⎞ + + + Fbz = 0⎜ =ρ 2 ⎟ ⎜ ⎟ ∂x ∂y ∂z ∂ t ⎝ ⎠
第二章_应力讲解

第二章 应力分析研究弹性力学问题要从三方面规律(条件):平衡、几何、物理来建立,本章就是研究第一个规律:平衡规律。
第1节 内力和外力1.1 外力:物体承受外因而导致变形,外因可以是热力作用、化学力作用、电磁力作用和机械力作用;另一方面从量纲分类,外力主要为体积力和表面积力。
我们讨论的外力是属于机械力中的体力和面力的范围。
1. 外部体力:作用在物体单位体积(质量)上的力如重力(惯性力)。
量纲:力/(长度)3。
求V 中任意点P 上承受体力采用极限方法:X X 2X X 2第2节 应力和应力张量2.1 应力当变形体受外力作用时,要发生变形,同时引起物体内部各点之间相互作用力(抵抗力)——内力,为了描述物体内任意点P 的内力可采取如下方法:过P 点设一个截面S 将V 分为两部分:(作用力与反作用力)FF -l n n x ==1、m n n y ==2、n n n z ==3。
即n t m t l t n t n t n t n t t z y x i i n )()()(3)3(2)2(1)1()()( ++=++==,,1S n P B C S A B C ∆∆∆∆==0)()(=++-V f S t S t i i n ∆∆∆而 S n S t t i i i i ∆∆=-=-,)()(代入上式,并忽略高阶微量 0)()(=-S n t S t i i n ∆∆或 )()(i i n t n t =展开为 3)3(2)2(1)1()(n t n t n t t n++= 或n t m t l t t z y x n )()()()( ++=2.1 应力张量每个坐标面上的应力矢量又可以沿三个坐标面分解三个分量,比如坐标面法线为x 1jxj j j z xz y xy x xx x e e e e e e e e t t σσσσσσσσ==++=++==1313212111)()1(x 2x 1 x 1(x)x 3,,32S n PAB S n PAC ∆=∆∆=∆同理,得j yj j j z yz y yy x yx y e e e e e e e e t t σσσσσσσσ==++=++==2323222121)()2(jzj j j z zz y zy x zx z e e e e e e e e t t σσσσσσσσ==++=++==3333232131)()3(将法线方向n 取为单位长度,则将式(3.25)代入式(3.26),得3.3.2.讨论:) ( 333333222222253.l p l p l p l p ⎪⎪⎪⎭⎪⎬====σσσσ) (2631232221.l l l =++7)=1 ()()+() (23322222311.p p p σσσ+(1):如果以p 1,p 2,p 3为坐标轴建立直角坐标系,则在此坐标系中,上式为一椭球面方程,主半轴分别为σ1,σ2,σ3,称为应力椭球面。
第二章应力状态理论(弹性力学)

第二章
应力状态理论
§2-1 张量分析基础
张量——在数学上,如果某些量依赖于坐标轴的选择, 并在坐标变换时,按某种指定的形式变化,则称这些 量的总体为张量。简化缩写记号表达物理量的集合。 显著优点——基本方程以及其数学推导简洁 张量的特征——整体与描述坐标系无关 ——分量需要通过适当的坐标系定义 一般张量——曲线坐标系定义
2 2 2 2 ∴ v = fvx + fvy + fvz −σv τ2
如已知 σ x ,σ y ,σz ,τ yz ,τ zx,τ xy, 就可求得任一斜截面 正应力和切应力。 正应力和切应力
应力状态理论
如果ABC是物体边界面:
lσx + m yx + n zx = fx τ τ
z
C v
fz
fxP
应力状态理论
§2-2 体力和面力
外力:构件外物体作用在构件上的力。 外力:构件外物体作用在构件上的力。
面力:作用在物体表面上的力,如接触力、 面力:作用在物体表面上的力,如接触力、液体压 力等。 表示。单位: 力等。用 fx , f y , fz 表示。单位:N/m2。 体力:分布在物体整个体积内部的力,如重力、 体力:分布在物体整个体积内部的力,如重力、惯
F 5
m
F 4
F 1 F 2
Ι
m
ΙΙ
F 3
F 5
F 4
F 1F 2ຫໍສະໝຸດ ΙΙΙF 3
应力状态理论
§2-3 应力和一点的应力状态 应力和一点的应力状态
应力:内力的分布集度。 应力:内力的分布集度。 r 平均应力: ①平均应力: r ∆ F f = ∆S 全应力: ②全应力: r r r ∆ F dF f v = lim = dS ∆S → 0 ∆ S
第二章弹性力学的基本方程

, , 1, 2
由此,向量 a可表示为
3
a a1e1 a2e2 a3e3 ai ei i 1
三阶线性代数方程组
a11x a12 y a13 z P1
a21
x
a22
y
a23
z
P2
a31
x
a32
y
a33
z
P3
可表示为
ai1x1 ai2 x2 ai3x3 Pi
(c) 非循环序列:i, j, k中有两个以上得指标取
相同值
e112 e222 e323 0
利用置换符号可以简化公式
(1)行列式
a11 a12 a13 a a21 a22 a23
( xix j
) ,ij
例如:
xi
,i
ui x j
ui, j
2ui x j xk
ui, jk
ui xi
ui,i
u1,1
u2,2
u3,3
f xi
dxi
f ,i dxi
f ,1dx1
f ,2 dx2
f ,3dx3
4、 克罗内克(Kroneker)符号
定义: ij ei e j cos(ei ˆ e j )
Fx
1 dh 3
0
同理可得:
Tx xl yx m zx n Ty xyl y m zy n Tz xzl yz m z n
上式称为斜面应力公式,又称Cauchy公式。
2、斜面上得正应力与剪应力
Tν Txl Tym Tz n
xl 2 y m 2 z n 2 2 xylm 2 yz mn 2 zx nl
ei
弹性力学_第二章__应力状态分析

第二章应力状态分析一、内容介绍弹性力学的研究对象为三维弹性体,因此分析从微分单元体入手,本章的任务就是从静力学观点出发,讨论一点的应力状态,建立平衡微分方程和面力边界条件。
应力状态是本章讨论的首要问题。
由于应力矢量与内力和作用截面方位均有关。
因此,一点各个截面的应力是不同的。
确定一点不同截面的应力变化规律称为应力状态分析。
首先是确定应力状态的描述方法,这包括应力矢量定义,及其分解为主应力、切应力和应力分量;其次是任意截面的应力分量的确定—转轴公式;最后是一点的特殊应力确定,主应力和主平面、最大切应力和应力圆等。
应力状态分析表明应力分量为二阶对称张量。
本课程分析中使用张量符号描述物理量和基本方程,如果你没有学习过张量概念,请进入附录一,或者查阅参考资料。
本章的另一个任务是讨论弹性体内一点-微分单元体的平衡。
弹性体内部单元体的平衡条件为平衡微分方程和切应力互等定理;边界单元体的平衡条件为面力边界条件。
二、重点1、应力状态的定义:应力矢量;正应力与切应力;应力分量;2、平衡微分方程与切应力互等定理;3、面力边界条件;4、应力分量的转轴公式;5、应力状态特征方程和应力不变量;知识点:体力;面力;应力矢量;正应力与切应力;应力分量;应力矢量与应力分量;平衡微分方程;面力边界条件;主平面与主应力;主应力性质;截面正应力与切应力;三向应力圆;八面体单元;偏应力张量不变量;切应力互等定理;应力分量转轴公式;平面问题的转轴公式;应力状态特征方程;应力不变量;最大切应力;球应力张量和偏应力张量§2.1 体力和面力学习思路:本节介绍弹性力学的基本概念——体力和面力,体力F b和面力F s的概念均不难理解。
应该注意的问题是,在弹性力学中,虽然体力和面力都是矢量,但是它们均为作用于一点的力,而且体力是指单位体积的力;面力为单位面积的作用力。
体力矢量用F b表示,其沿三个坐标轴的分量用F b i(i=1,2,3)或者F b x、F b y和F b z表示,称为体力分量。
弹性力学第2章—应力

τyz
px
O
τzy
τxz
τzx
σz
σx
py
B
y
( ) σ x′
=
σ
x
l
2 x′x
+
σ
y
l
2 x′y
+
σ
z
l
2 x′z
+
2 τ xy lx′xlx′y
+ τ yz l lx′y x′z
+ τ zxlx′xlx′z
即 σ1′1′ = l1′il1′ jσ ij
σ σ 同理可得 σ1′2′ = σ l l1′i 2′ j ij , = l l 1′3′ 1′i 3′ j ij
pn
=
lim
ΔSC →0
ΔP ΔSC
Bn
C σ n ΔP
P
ΔSC
τ
pn
n
A
O
y
x
2.1 应力的概念
应力的分解:
应力矢量分解为正应力(截面法向)和剪应力(切向)
正应力 剪应力
σn τn
= =
lim
ΔSC →0
lim
ΔSC →0
ΔPn ΔSC ΔPs ΔSC
⎫
⎪⎪ ⎬ ⎪ ⎪⎭
pn = σ nn + τ ns
z
Bn
C σ n ΔP
P
ΔSC
τ
pn
n
A
σ n = pn ⋅ n
O
τ n = pn ⋅ s =
p2
−
σ
2 n
y
x
2.1 应力的概念
一点的应力状态:
过固体内部一点的所有截面上应力的集合
弹性力学第2章—应力

⎡σ x τ xy τ xz ⎤ ⎢ ⎥ [σ ij ] = ⎢τ yx σ y τ yz ⎥ ⎢ ⎥ τ τ σ zx zy z ⎣ ⎦
i, j = x, y , z
τzx
σy
σz
τzy
σx
τyx τ xyτ τ xz yx τ xz τ xy τyz
σxτ
τ yz Δz σ
y
O
σz Δy
zy
τzx
截面上的切应力:
2 n
τyz
px
x
A
τzy
τzx
σz
τxz p y
σx
B
y
τ = pi pi − σ = σ ij n jσ ik nk − (σ ij n j ni )
2
2.2 一点的应力状态
应力分量的转换方程
应力张量在坐标变换时的转换公式 和 Ox ′y ′z ′ ,其中 x ′ 轴取为斜截面的 法向 n ,并通过O点。 沿 x ′ 轴方向的正应力为 令变换前后的坐标系分别为Oxyz
Δx
y
x
2.1 应力的概念
应力张量的特点:
当坐标系变换时, 另一坐标系
σ ij 能够按照一定的变换式变换成 Ox ′y ′z ′ 中的九个分量 σ i′j′
i ′, j ′ = x ′, y ′, z ′
⎡ σ x′ τ x′y′ τ x′z′ ⎤ ⎥ [σ i′j′ ] = ⎢ τ σ τ y′ y ′z ′ ⎥ ⎢ y′x′ ⎢ ⎣τ z′x′ τ z′y′ σ z′ ⎥ ⎦
同理可得 σ 1′ 2′ = l1′i l2′ jσ ij ,
σ 1′ 3′ = l1′il3′ jσ ij
2.2 一点的应力状态
弹性力学_第二章 应力
P / A0 cos2 ( P / A0 ) cos sin
§2-4 平面应力状态
平面应力状态应力关系
边界只存在正应力情况 平面应力状态如图所示,假设z=0。 x-1 ,y-2 ,任意截面上BC:(, ) 设截面BC的面积A, AC面积为Acos,
= 0。
§2-4 平面应力状态
边界同时存在正应力、剪应力情况
如图所示, x-x、 ;y-y、 任意截面上BC:( ,) 设截面BC的面积A, AC的面积为Acos , AB的面积为Asin 。
边界同时存在正应力、剪应 力时斜截面受力图
§2-4 平面应力状态
沿BC面的法线方向力的平衡方程为:
弹性力学
第二章 应力
§2-1 §2-2 §2-3 §2-4 §2-5 外力 应力与应力张量 平衡微分方程 平面应力状态 空间应力状态
§2-6 主平面、应力主方向与主应力 §2-7 空间应力状态几何表示
§2-8 纯剪切状态
§2-9 应力球张量和应力偏张量 §2-10 八面体应力
§2-1 外力
物体外力
1 1 2 2 1 2 1 2 2 4
应力圆:任一截面正应力与剪应力关系图 确定任一截面上的和 。 坐标系: - 圆 应力圆
(或莫尔圆,由德国工 程师:Otto Mohr引入)
2
心: 轴上点 径: 1 ( ) 1 2
当 d x , d y 0 时,得切应力互等定理:
xy yx
§2-3 平衡微分方程
推广到三维应力状态
x yx zx Fx 0 x y z xy y zy Fy 0 x y z xz yz z Fz 0 x y z
弹性力学3-应力状态、几何方程

1、主应力—由三个应力分量
s
x
,s
y
,t
求解主应力及主方向
xy
由式(2-4、2-5),斜面应力随角度变化,如某一斜面上的切
应力为零t n 0 ,则该斜面上的正应力s n 称为P点的一个主
应力,该斜面就称为该点的一个应力主面,该斜面方向(法线
方向)就称为该点的一个应力主方向。
由于切应力为零 t n 0 ,全应力就等于该面上的正应力。
(2-3b)
注意体力项的作用。以上推导用到了切应力互等定理。
第二章 平面问题的基本理论
2.3 平面问题中一点的应力状态-斜面上的应力
2、过P点斜面上的应力的正应力和剪应力分量sn、tn
由Px、Py 分别向斜面法向和切向的投影+切应力互等定理可得:
s n lpx mpy t n lpy mpx
s1 = sx s y
s2
2
s
x
s
2
y
2
t
2 xy
B
y
O
P t yx s y
x
t xy
s1
s2
sx
可以看出:s x s y =s1 s2 I
※ 应力张量第一不变量
sx
y
s2
s1
t xy
1
t yx
sy
第二章 平面问题的基本理论
2.3 平面问题中一点的应力状态-主应力及方向
2、主应力方向
主应力面(主平面):主应力 s 所在的 O
第二章 平面问题的基本理论 2.4几何方程
当应变分量全为0时: x y g xy 0
由几何方程得:u 0, v 0, v u 0
x
y
弹性力学应力状态2
+
∂σ
y
∂y
+
∂ τ zy ∂z
+Y = 0
∂ τ yz ∂τ z ∂σ z + + +Z = 0 ∂x ∂y ∂z
切应力互等定理
σ ij = σ
ji
2-10 静力边界条件--应力与面力的关系 - 静力边界条件-- --应力与面力的关系
2 2 2 2 τ n = p 2 − σ n = p x + p y + p z2 − σ n
剪应力
已知物体内一点的9个应力分量, 已知物体内一点的 个应力分量,就可求出 个应力分量 任一斜截面上的全应力和正应力、剪应力。 任一斜截面上的全应力和正应力、剪应力。
四、应力张量
使用应力张量可以完整地描述一点的应力状态
2. 将Px、Py、Pz投影到 轴上,得x’面上的正应力: 投影到x’轴上 面上的正应力: 、 、 投影到 轴上, 面上的正应力
3. 将Px、Py、Pz分别向 、z’轴投影,得x’面上沿 方 分别向y’、 轴投影 轴投影, 面上沿y’方 、 、 分别向 面上沿 向的剪应力和沿z’的剪应力 的剪应力: 向的剪应力和沿 的剪应力:
三、平面问题的应力坐标转换公式
2-4 -
主应力、 主应力、应力张量不变量
主平面是指剪应力为零的平面 主平面是指剪应力为零的平面 应力主轴为主平面法线方向(或主方向) 应力主轴为主平面法线方向(或主方向) 为主平面法线方向 主应力为主平面的正应力 主应力为主平面的正应力
一、应力状态的特征方程
A点处有一个主面n 点处有一个主面 剪应力为0 剪应力为 正应力即全应力
2 2 2 + (σ z − σ m )(σ x − σ m ) − τ xy − τ yz − τ zx ]
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
同理,由 Fy 0, Fz 0 :
fvx , fvy , fvz为fv在 x, y, z轴上的投影
fvy ms y n zy l xy fvz ns z l xy m yz
➢应力张量为对称张量。
➢ 一点的应力状态完全 由应力张量确定。
应力状态理论
§2-4 与坐标倾斜的微分面上的应力
z
C
o x
v
xy sx
sy
yx
xzfv
yz P zy zx
B
A
sz
PABC 的体积为 V
体力为 Fx,Fy,Fz
ABC 上的应力为 fv
v ― 平面ABC的外法线 v的方向弦为:
cos(v, x) l cos(v, y) m cos(v, z) n
应力状态理论
x面的应力: s x , xy , xz
y面的应力: s y , yx , yz
z面的应力: s z , zx , zy
应力状态理论
➢ 一点的应力状态: 过一点有无数的截面,这一点的各个截面上应力情况的集合,
称为这点的应力状态(State of Stress at a Given Point)。
偶排列 有序数组1,2,3逐次对换两个相邻的数字而得到的 排列 奇排列
e123 e231 e312 1
e132 e321 e213 1
应力状态理论
二阶对称张量 反对称张量
Tij T ji Tij T ji
任意一个二阶张量,总是可以分解为一个对称张 量和一个分对称张量之和。
张量的对称和反对称性质,可以推广到二阶以上 高阶张量。
应力状态理论
第二章 应力状态理论
§2-1 张量分析基础
张量——在数学上,如果某些量依赖于坐标轴的选择, 并在坐标变换时,按某种指定的形式变化,则称这些 量的总体为张量。简化缩写记号表达物理量的集合。 显著优点——基本方程以及其数学推导简洁 张量的特征——整体与描述坐标系无关
——分量需要通过适当的坐标系定义 一般张量——曲线坐标系定义
sx
yz zy
zx xz
x
sy
y
应力状态理论
应力张量:应力分量 sx 、 sy 、 sz 、xy 、 yx 、 yz 、 zy 、 zx 、 xz,构成应力张量。
s ij syxx zx
xy = yx yz = zy
xy sy
xz yz
zy s z
zx = xz
➢应力张量为二阶张量。
e ij ,kl
e ij
xk xl
s ij,k
s ij
xk
s ij,kl
s ij
xk xl
张量的偏导数集合仍然是张量(不作证明)
应力状态理论
特殊的张量符号
克罗内克尔(Kronecker Delta)记号d ij
1
d ij
0
i j i j
显然
d11 d11 d13 1 0 0
d ij d 21
➢ 应力状态的表示——单元体: 单元体:构件内点的代表物,是包围被研究点的无限小 的几何体,常用的是正六面体。
y
sy
yx
sz
z
xy sx
x
单元体的性质 任一面上,应力均布;
应力状态理论
➢单元体上的应力分量: z
sz
正应力:
sx
yx
sy sz
sy
剪应力:
yz
zx xz
zy yz
xy yx
xy yx
表示。单位:N。
应力状态理论
内力:由于外力作用,在构件内各部分之间引起的 相互作用力。 内力的特点:
1. 随外力的变化而变化,是“附加内力”。 2. 内力是分布力系,常用其主矢量和主矩表示。 内力的求法:截面法。
F5
F1
F2
m F4
m
F3 F1
F5
F2
F4
F3
应力状态理论
§2-3 应力和一点的应力状态
ABC S 则:
y
BPC lS CPA mS APB nS
应力状态理论
z
C
由 Fx 0 :
v
fvxS s xlS yxmS
o x
sy
A
yxfvz xy
sx xz
yz Pfvx fvy
zy zx
sz
y
zxnS FxV 0
当 PABC → P 时:
B
fvx ls x m yx n zx
d 22
d
23
Байду номын сангаас
0
1
0
d 31 d 32 d 33 0 0 1
克罗内克尔记号是二阶张量
运算规律
d ii d11 d 22 d 33 3 d imam ai d T im mj Tij
应力状态理论
置换符号eijk 1
eijk 1 0
i,j,k为1,2,3的偶排列 i,j,k为1,2,3的奇排列 有相等下标时
自由标个数表 示张量表达式
代表的方程数
应力状态理论
偏导数的下标记法
缩写张量对坐标xi偏导数的表达式
逗号约定 逗号后面紧跟一个下标i时,表示某物理量
对xi求偏导数。
( ),i xi ( )
利用偏导数下标记法,偏导数均可缩写为
ui, j
ui x j
ui, jk
ui x jxk
e ij ,k
e ij
xk
应力状态理论
§2-2 体力和面力
外力:构件外物体作用在构件上的力。
面力:作用在物体表面上的力,如接触力、液体压
力等。用 fx , fy , fz 表示。单位:N/m2。
体力:分布在物体整个体积内部的力,如重力、惯
性力等。用 Fx,Fy,Fz表示。单位:N/m3。
集中力:当面积趋于零时,面力的合力。用 P、F
应力状态理论
笛卡儿(Descartes)张量定义
应力状态理论
三维Descartes坐标系中,一个含有3个与坐标相关独
立变量集合,通常可以用一个下标表示。
位移分量u,v,w
表示为u1, u2, u3
缩写记为ui(i=1, 2, 3)
i——下标
9个独立变量的集合,两个下标来表示
sij和eij ——9个应力分量或应变分量
应力:内力的分布集度。
①平均应力:
r f
r ΔF
S
lim ②全应力:
r fv
S 0
r ΔF S
r dF dS
F S C
fv v
sv
C
F4 F3 F4
全应力分解为:
F3
lim 垂直于截面的应力称为“正应力”:
sv
ΔA0
ΔN ΔS
dN dS
lim 位于截面内的应力称为“剪应力”:
v
ΔA0
ΔT ΔS
dT dS
sij,k
——27个独立变量的集合用三个下标表示
应力状态理论
求和定约
张量表达式的某一项内的一个下标出现两次,则对此 下标从1到3求和。
3
A ak k ak k
k 1
A
aij i j aij i j
ij
哑标: 出现两次的下标——求和后消失
自由标:非重复下标
xi cij y j
x1 c11 y1 c12 y2 c13 y3 x2 c21 y1 c22 y2 c23 y3 x3 c31 y1 c32 y2 c33 y3