地面防空导弹引战配合数字仿真研究
导弹最优导引律仿真分析(例子)
到限制,导弹结构能承受的最大过载也受到限制,所以控制信号 u 应该受到限制,因此,选
择下列形式的二次型指标函数
( ) ( ) ∫ ( ) J = 1 X T 2
tf
CX t f
+ 1 tf 2 t0
X T QX + U T RU dt
⎡c1 0 0 0 ⎤ ⎡0 0 0 0⎤
式中,
C
=
⎢ ⎢
0
c2
0
0
⎥ ⎥
,
Q
=
⎢⎢0
0
0
0⎥⎥
⎢0
⎢ ⎣
0
0 0
c3 0
0⎥
c4
⎥ ⎦
⎢0 0 0 0⎥ ⎢⎣0 0 0 0⎥⎦
2.2.2 最优导引律
(11)
完全考虑弹体二阶振荡环节时,假定目标不机动,导弹运动的状态方程见式(8),即
•
X = AX + Bu
(12)
⎡0 1 0 0 ⎤ ⎡ 0 ⎤
式中, A = ⎢⎢0 0 VD ⎢0 0 0
]
2(t f − t)2 + 6(t f − t)
ω
ω2
−
15 4ω
2
3
]
K3 (t) =
KDVD [(t f
− t)3
3 ω2 3 −
(t f
−t −
3 )2 ω
2(t f ω
− t)2
+
6(t f − t) ω2
−
15 4ω
2
3
]
最优导引方框图如图 3 所示。
6
u(σ )
KDω 2
+
1 s x4 1 s x3 VD +
导弹仿真测试系统研究
PART 04
某型导弹的仿真测试过程与结果分析
导弹型号:具体型号
测试目的:验证导弹性能指标
测试过程:发射、制导、命中等环节的模拟
结果分析:测试数据、误差分析、改进建议
导弹仿真测试系统在作战训练中的应用
提少实弹演习的消耗和风险
仿真测试环境的构建与优化
导弹仿真测试系统的技术实现
仿真测试环境的优化策略
仿真测试环境对导弹性能的影响
仿真测试环境的构建方法
测试数据的采集、处理与评估
采集方法:传感器、数据采集卡等设备采集导弹仿真测试过程中的各种数据
处理技术:数据预处理、滤波、降噪等技术对采集到的数据进行处理,以提高数据的准确性和可靠性
导弹仿真测试系统研究
汇报人:
目录
01
添加目录项标题
02
导弹仿真测试系统概述
03
导弹仿真测试系统的技术实现
04
导弹仿真测试系统的应用实例
05
导弹仿真测试系统的未来发展
06
结论
添加章节标题
PART 01
导弹仿真测试系统概述
PART 02
导弹仿真测试系统的定义和作用
导弹仿真测试系统的定义:一种用于模拟导弹飞行和攻击过程的测试系统,通过模拟实际作战环境,对导弹的各项性能进行全面检测和评估。
云计算技术:实现大规模数据处理和存储,提高测试的实时性和可靠性
5G通信技术:实现高速数据传输,提高测试的实时性和准确性
导弹仿真测试系统在智能化战争中的作用与前景
智能化战争对导弹仿真测试系统的需求
01
02
导弹仿真测试系统在智能化战争中的优势
导弹仿真测试系统在智能化战争中的发展趋势
R-77导弹引信导控一体化系统的分析与仿真的开题报告
R-77导弹引信导控一体化系统的分析与仿真的开题报告一、研究背景随着现代战争的不断发展,导弹已成为现代军事力量的重要组成部分。
为满足导弹作战能力提升的需求,导弹引信导控一体化系统被提出并逐渐应用于现代导弹技术中。
它是指将导弹引信、仿形控制器、惯性测量装置集成到一个系统中,从而实现引信、导控的协同控制。
其中,R-77导弹引信导控一体化系统是俄罗斯的一种代表性导弹。
二、研究目的本文旨在对R-77导弹引信导控一体化系统进行深入研究,建立系统仿真模型,并通过仿真实验,分析系统的动态响应、鲁棒性等性能指标。
为导弹设计和制造提供理论基础和技术支持。
三、研究内容1. R-77导弹引信导控一体化系统的原理和结构分析;2. 建立R-77导弹引信导控一体化系统的仿真模型;3. 分析R-77导弹引信导控一体化系统的动态响应特性;4. 研究R-77导弹引信导控一体化系统的鲁棒性和稳定性。
四、研究方法1. 文献调研法通过查阅相关文献,了解R-77导弹引信导控一体化系统的原理、结构及其工作原理。
2. 建模仿真法基于MATLAB/Simulink软件,建立R-77导弹引信导控一体化系统的仿真模型,并对其进行参数设置、建模、仿真等步骤。
3. 系统分析法通过系统分析方法,分析R-77导弹引信导控一体化系统的性能指标。
包括:动态响应特性、鲁棒性、稳定性等方面。
五、研究意义通过本次研究,可以全面了解R-77导弹引信导控一体化系统的工作原理和性能指标,为导弹设计和制造提供理论基础和技术支持,同时对于智能武器的研究和发展具有重要的指导意义。
六、预期结果通过本次研究,将得到R-77导弹引信导控一体化系统的仿真模型,并对其进行仿真实验、性能评估、参数调整等,最终得到系统的性能数据和实验结果,并对系统的优化提出具体建议。
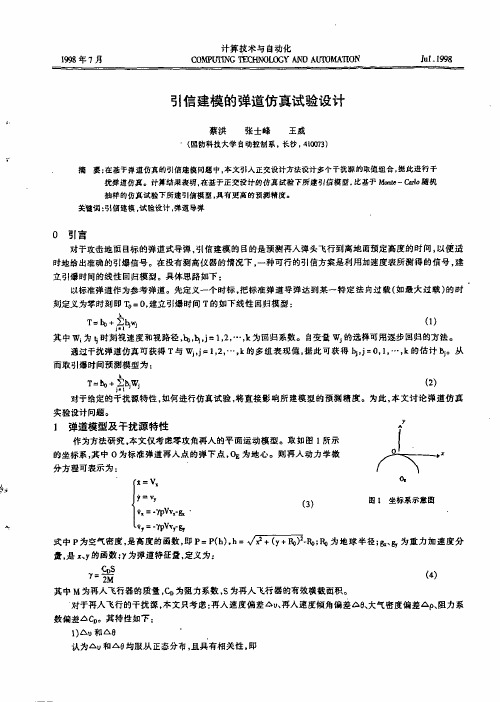
引信建模的弹道仿真试验设计
其中 ‘ 时 视 度 视 径,丙, 1 ,- 为 归 数。 变 w 为、 刻 速 和 路 场 i ,0, 回 系 自 盘叭 的 可用 步回 的 法 二2 k 选择 逐 归 方 。 通 干 弹 真 获 与吼. 1 ,- 的 组表 值,此可 得}j。 , ,的 计乌 从 仿 可 得T 过 扰 道 j ,-, 多 现 据 获 , , … k 估 。 二 2 -k 二1
分方程可表示为 :
}、 :二 二 y V r ,
奋, 二y 是 的函数;为弹道特征盒, 7 定义为:
() 3
图 I 坐标系 示愈图
式 P 空 密 ,高 的 数即 二(, 石 石砰-: 球 径& 为 力 速 分 中 为 气 度是 度 函 ,PP) 二 兀百 hh RR 地 半 1& 重 加 度 oD 为 ,
(2) 1
则 。 二 1 r 、‘ o h 一 - }
、 I 二 (1 。a) +
其中殊,.表示正态分布函数 刚 的反函数。 ()
(l3) (l’)
本 取。1按正 设 理b , 交 计原 [ 造7 素1 平的 交 计 值表,有3 种 组 况。 文 =9 ]构 因 9 水 正 设 取 共 6 取值 合情 将 1
方 [ 选 九 变 它 是: 的 速 x ,秒 的 路 x,5 时 速 x, 5 法 ,取的 个自 量。 们 3 ] s 秒时 视 度() 时 视 径() .秒 的视 度() .秒 ,4 24 35
时的视路径( ) 秒时的视逮度( ) 秒时的 x ,. , 5 5 x, 56 视路径()6 x ,秒时的视速度( 65 6 x .秒时的视速度( )7 0, x,秒 & 时的视速度( ) xo ,
1 4 0
计 算技术与 自动化 / 1 1 D & r , 1
空地导弹模拟训练仿真系统设计研究

6)视景仿真邦员:虚拟飞机座舱、战场环境、目标等。
图1系统仿真平台联邦结构2.2系统FOM/SOM开发设计联邦对象模型(FOM)和仿真对象模型(SOM)由仿真设计人员制定并颁布。
设计对象类和交互类是FOM/SOM设计的最重要内容,通过它们可实现联邦成员之间的信息交换和互操作。
通过设计对象类和交互类,从而确定各个联邦成员之间的数据流和控制流。
系统根据功能需求,设计了目标、导弹、飞机、环境、干扰和指挥等几个对象类,控制仿真、指控信息、以及空地导弹四个交互类。
对象类的基本属性、属性标识以及数据类型等具体如表1所示,交互类的参数、参数标识以及数据类型等具体如表2所示。
表1对象类基本属性(下转第200页表2交互类研究方向为航空制导武器的作战使用与仿真。
研究方向为航空制导武器的作战使用与仿真。
3系统实现3.1开发环境系统采用Windows XP操作系统,以协同仿真平台的高层建筑BH RTI2.0软件为建模环境,利用VC++6.0编程软件,搭建一个集空地导弹通信指挥、发射控制、操作流程及系统教学为一体的仿真模拟训练平台。
3.2仿真执行过程仿真执行的具体步骤如下:1)仿真开始运行,系统调用InitializeFederation()初始化各个数据,调用Fed.CreateFederation()创建空地导弹模拟训练系统联邦,调用Fed.JoinFederation()使总控、指控、发控、导弹、数据记录等邦员加入联邦;2)系统调用Fed.InitRTI()获取导弹、控制平台等对象类及其属性,这对于未来空地导弹。
在实践中总结、积累经验。
地空导弹战时装备保障仿真系统设计与实现

Design and Implementation of Equipment Support Simulation System on Ground to Air Missile in Wartime
装备 保障 方案
生成 验证
装备 保障 资源
调度 模块
装备 保障 能力 评估 模块
图2仿真系统功能组成图
装备保障需求分析模块基于地空导弹装备的作战使用 特点、设计技术特征,结合装备保障模式、装备保障技术的发 展,分析产生地空导弹装备保障性设计要求和装备保障力量 建设需求,为装备承制单位装备保障性设计和部队装备保障 力量建设提供支持。该模块的功能需求包括:装备作战使用 特点分析、装备设计技术特点分析、装备保障模式机制分析、 装备保障系统需求分析。
1引言 装备保障是指军队为使所编配的武器装备顺利遂行各
种任务而采取的各项保障性措施与进行的组织指挥活动的 统称,包括维修保障、供应保障及支援保障等⑴。战时装备 保障则基于特定的作战训练任务,是战时恢复、保持装备战 斗能力的重要手段,对战争的胜负有着极其重要的作用。装 备保障仿真是以装备保障部分队、装备保障指挥机关和保障 活动为基本仿真对象,通过仿真手段,为装备保障及其指挥 训练提供相应支撑平台,也可为装备保障理论研究和保障效 能评估与发展论证研究提供技术支持⑵。目前装备保障仿 真的相关研究文献较多[3-5],但针对地空导弹装备开展战时
2) 装备保障资源规划模块 装备保障资源规划模块能基于地空导弹装备的作战使 用特点和战备完好性要求,依据装备保障性设计和装备使用 与维修保障要求,进行人力与人员、备件供应、保障设备设 施、技术资料、训练保障、贮运保障、计算机资源保障等进行 规划,以达到集约、高效和精确化保障目标。该模块的功能 需求包括:人力人员保障规划、备件供应保障规划、设施设备 保障规划、技术资料保障规划、训练保障规划、贮运保障规 划、计算机资源保障规划。 3) 装备保障方案生成与验证模块 针对地空导弹装备作战任务对应装备保障需求,以装备 保障资源调度系统产生的数据为输入,进行其装备保障方案 生成、装备保障力量部署、装备保障方案仿真和装备保障方
地空导弹弹道仿真模型
地空导弹弹道仿真模型V0L31,NO.10October,2006火力与指挥控制FireControlandCommandControl第31卷第10期2006年10月文章编号:1002-0640(2006)10—0069—04地空导弹弹道仿真模型*周林,赵杰,娄寿春(空军工程大学导弹学院,陕西三原713800)摘要:地空导弹弹道仿真是地空导弹火力单元作战过程仿真的一个重要环节,仿真模型的合理性,算法的可行性,过程描述的正确性,直接影响防空作战仿真结果.从仿真的实际需要出发,给出不同引导方法下的弹道仿真模型,算法,过程描述及关键问题的解决方法,并通过实际应用验证了模型,算法的合理性,可行性和实用性.关键词:地空导弹,作战仿真,弹道仿真,仿真模型中图分类号:TP391.9文献标识码:A ResearchintotheTrajectorySimulationModelofGroundtoAirMissileZHoULin.ZHAOJie.LOUShou—chun (TheMissileInstituteoftheAirForceEngineeringUniversity,Sanyuan713800,China) Abstract:Groundtoairmissiletrajectorysimulationwasanimportanttacheincombatproces ssimulationofgroundtoairmissilefireunit.Itaffectedtheresultofairraid—defensecombatsimulation,whichwastherationalityofsimulationmodel,thefeasibilityofairthmeticandthevalidityofp rocessdescription.Thetrajectorysimulationmodel,arithmetic,trajectorysimulationandkeyprobl emresolvemethodwareputforwardinthispaper,itwasbasedontheneedoffact.Thefeasibility,validitya nd practicabilityofmodelandarithmeticwarevalidatedbypracticeapplication. Keywords:groundtoairmissile,combatsimulation,trajectorysimulation,simulationmodel —口地空导弹弹道仿真模型的合理性,可信赖性及模型算法的正确性,直接影响地空导弹火力单元作战仿真结果.本文以地空导弹群作战仿真为背景,综合利用地空导弹的速度特性,运动特性和杀伤特性等,构建地空导弹弹道仿真模型,并给出模型生效算法,弹道仿真过程描述及关键问题的解决方法.1地空导弹特性分析及表述地空导弹特性是指地空导弹的物理特性,运动收稿日期:2005—01—19修回日期:2005—03—26*基金项目:总装备部预研基金资助项目(41327040201)作者简介:周林(1965一),男,江苏涟水人,副教授,博士,主要从事防空作战建模与计算机仿真研究.学特性,动力特性和战斗部特性等[1].在构建地空导弹弹道仿真模型时,必须根据仿真研究的目的和要求,对地空导弹特性进行分析,抽象和简化处理,既要能真实地反映导弹的特性,又能较好地满足仿真的要求.1.1地空导弹的物理特性地空导弹的物理特性主要包括:导弹长度,弹体直径,导弹发射重量,舵展,导弹通电次数等.由于仿真要建立的是物理特性已确定的地空导弹质点运动学弹道模型,所以,除导弹通电次数外,其他的特性可用导弹的飞行特性和制导误差来表述,而导弹的通电次数可在导弹可用性中体现.1.2地空导弹的运动学特性地空导弹的运动学特性主要包括:平均飞行速度,最大飞行速度,最大射程,最大机动过载和自毁时间等.它直接关系到地空导弹的最大作战距离和能拦截目标的最大机动过载.由于要建立的是导弹70(总第31--838)火力与指挥控制?2006年第10期质点运动学弹道仿真模型,模型必须将上述运动学特性转化为导弹的飞行特性.1.3地空导弹的动力特性地空导弹的动力特性主要包括:发动机最大推力,发动机工作时间和发动机类型等.可用导弹的速度特性来表述导弹的动力特性.1.4地空导弹的战斗部特性地空导弹的战斗部特性主要包括:战斗部类型,战斗部重量,引战配合效率,战斗部杀伤半径和威力参数等.由于战斗部类型和重量不同,只对杀伤目标的机理和破片质量产生影响;引战配合效率反映引信能否适时引爆战斗部;战斗部杀伤半径和威力参数反映导弹在落人条件下对目标的杀伤效果.战斗部特性可用落人条件下毁伤目标的概率来表述.因此,在构建地空导弹弹道仿真模型时,主要考虑以下的特性:导弹的飞行特性(f)或,.();导弹自毁时间t;战斗部杀伤半径;导弹单发杀伤概率P.2地空导弹弹道仿真模型地空导弹弹道仿真模型不仅与导弹的特性有关,还与引导方法,目标信息等有关.常用的引导方法有:三点法,前置点法,半前置点法,比例导引法, 扩展比例导引法.等.本文只讨论目前在地空导弹中使用广泛的三种引导方法,即三点法,半前置点法和比例导引法时的情况.2.1三点法引导时的弹道仿真模型三点法也叫重合法,是指使制导站,导弹,目标始终保持在一条直线上的引导方法.引导关系为3Em【一J9其中,,为目标的高低角和方位角;,为导弹的高低角和方位角.算法步骤如下:(1)设to一0时刻发射导弹,此时导弹位置为(0,0,0).任一时刻t目标的坐标为(z,y,2),则可得目标的斜距,高低角和方位角为●.....________●_-........__●_______-_..一,.一√z++2一tg—=兰=√z+21cos-I_(zm≥0)l√z+2一.《啷焘<0)(2)由导弹的飞行特性可得任一时刻t导弹的斜距,.d;(3)任一时刻t导弹的高低角和方位角£d一£m,8d一8m(4)任一时刻t的导弹的直角坐标为IXdzrdCOS~;dCOS8d{Y a=rasinea【Zd=COSedSin(5)任一时刻t导弹与目标间的距离,.,.一√(z一zd).+(--yd).+(2--2'd).(6)当,.<,.时,导弹战斗部起爆;若,.>,.,且飞行时间≥时,导弹自毁.rss为战斗部威力范围,f为导弹自毁时间.2.2半前置点法引导时的弹道仿真模型半前置点法是指使导弹超前目标视线一个角度的引导方法.引导关系为3Ed=Em+q\,8d—mj广△$qAeq,A为前置角一【△一一兰c.s其中,,.为目标和导弹之间的距离;为目标与导弹之间的距离变化率;为目标的高低角速度;为目标的方位角速度.算法步骤如下:(1)设在to一0时刻发射导弹,此时导弹位置为(0,0,0).任一时刻t目标的坐标为(z,y,2),则目标的斜距,高低角和方位角同重合法情况.(2)任一时刻t目标的高低角速度和方位角速度f一t±生)二超J,.√+21..【一±繁(3)£.,t.时刻导弹与目标的距离变化率周林,等:地空导弹弹道仿真模型(总第31—839)?71? ,.d1一√(zl—zd1)+(l一1)+(21—2d1).,.d2一√(z2一zd2)+(2一2)+(22—2d2).(4)£:时刻的弹目距离变化率d一(rd2--rd1)/At(5)£:时刻导弹得的前置角△,△:一:一mcose(6)假定t:到t.时刻导弹的前置角不变,得t.时刻导弹的高低角和方位角:f£d一£+△£口8d一8m+△8q(7)£.时刻导弹的直角坐标Izd:rdCOSEdcosfldJ=rasinea【2;dcoseasin(8)任一时刻导弹与目标间的距离rrind一√(z一幻)+(一)+(2--Zd)(9)当rind≤时,导弹战斗部起爆;若r>,且飞行时间£≥时,导弹自毁.2.3比例导引法引导的弹道仿真模型比例导引法是指保持导弹速度矢量转动的角速度0与目标视线转动的角速度成比例的引导方法_5].引导关系为一K(垂直平面内)一K水平面内)式中,K为引导系数.算法步骤如下:(1)发射导弹时刻t.,导弹坐标为(O,o,O),目标坐标为(z0,y0,20);(2)开始引导时刻t.,导弹,目标坐标为(勋.,ya-,2d1),(z1,yl,2.),导弹速度方向Oal=tgCal=tg假定开始引导时,导弹的速度方向与弹目视线重合,于是有体1一Oal,伫:l一l(3)若t~£时间段内导弹的速度方向保持不变,则t:时刻导弹坐标为fzd2一zd1+Vd1COS1cosOd1Yd2一1+Vd1COS1sin1【2d2:2dl+Vd1sinCal弹目视线方向9,p2=tg等等弹目视线转动角速度导弹的速度矢量转动角速度:一K蟊:儿:一K::导弹的速度矢量方向Oa2一Oa1+2(£2--t1)2:1+2(£2--t1)(4)若在t~£时间段内导弹的速度方向保持不变,则t.时刻导弹的坐标为fXd3:zd2+d2cos~d2COSOa2.《d3一Yd2+d2cos~d2sinOd2【2d3=2d2+d2sin~d2然后按步骤(3)进行计算.(5)导弹与目标间的距离rr耐:√(z一zd)+(一yd)+(2一2d).(6)当r≤时,导弹战斗部起爆;若r>,且飞行时间£≥时,导弹自毁.3地空导弹弹道仿真过程描述地空导弹火力单元进行目标识别,威胁评估后,进行发射决策],在仿真时间到达导弹发射时刻,发射架对象向地空导弹对象发送导弹发射消息.地空导弹对象在接收到发射导弹消息后,即进行弹道解算,其仿真过程如下页图l所示.4关键问题的处理下面给出在模型算法实现和仿真运行时,几个关键问题的处理方法4.1导弹飞行特性l,(f)或,(f)在导弹的性能参数中,通常只给出导弹平均速度,最大速度,发动机工作时间,一级火箭(二级火箭)末速等.因此,要用已知的导弹特性数据来确定72?(总第31—840)火力与指挥控制2006年第1O期读取目标数据/^\目标已被毁伤?\/lNi弹自毁lN藿导lr匦二+l标的其他导l宣布死亡卜l返回l弹自毁l——一——厂j丽三『_一厂面惑蔷IY计算导弹第一点点迹IY计算导弹第二点点迹lYt计算导弹第三点后点迹InsertDotFlag=17I里竺竺r1兰塑竺卜l塑堑l图1地空导弹弹道仿真过程逻辑图()或r().由于初始段导弹尚不能杀伤目标,可对进行简化处理,假定在发动机工作时导弹匀加速运动,被动段时是匀减速运动,即c一.+a一{二-.一萋:r(£):ro+0+÷口£.一f百1口1£2£≤£1l厶Ir1+1(t--t~)一1口2(t--t~).£>£1式中,a为主动段加速度;t为发动机工作时间为末速;口为被动段加速度,r为发动机停止工作时刻导弹的斜距.4.2点迹插值由于仿真步长较长(如ls),在一个仿真周期内,目标和导弹的相对运动距离较大(达1000m以上),而地空导弹的杀伤半径较小(通常为几米~几十米),无法及时判断导弹是否落入.因此,要进行插值处理.插值时间通过对多种型号地空导弹的仿真分析,选取在弹目距离2000m时进行插值比较适合.若选取的相对距离较远,则会增加计算量;相对距离太近,则不能满足要求.插点数量插点数Ⅳ可按下式计算N—N丁[??K]其中,,Ⅳ71Ix]为取不小于z的整数,7为仿真步长为导弹战斗部杀伤半径;为当前目标速度;K通常取4~6.插值方法先对目标数据插值,然后依据插入点目标数据,按照弹道模型解算相应点的导弹位置信息.目标对地攻击时,通常为等速平直飞行或近似等速飞行,假定在一个周期内目标的速度保持不变, 由当前时刻目标位置(z…Y)和速度(……),可得下一任意时刻目标位置zJ—z+(J一).)r一+(tj--ti)J—+(fJ一)5结论地空导弹弹道仿真是地空导弹火力单元作战仿真的一个重要环节.本文从仿真实际出发,建立了弹道仿真模型及算法实现步骤,并给出了关键问题的解决方法.该模型和算法已成功地用于国防实验室项目中的子项目内,通过仿真验证表明,模型合理, 算法正确,对于关键问题的处理方法可行,有效地保证了仿真结果的可信度.参考文献:[1]李宏模.防空导弹武器系统分析[M].三原:空军导弹学院,1997.[2]康风举.现代仿真技术与应用[M].北京:国防工业出版社,2001.[3]王银坤,肖明清,赖根.一种扩展的比例导引规律及其弹道方程的构建[J].航空计算技术,2001,32 (1):14—16.[4]周林,张文,娄寿春,等.多通道地空导弹武器系统拦截决策模型研究[J].系统仿真,2002,14(6):698—699.[5]娄寿春.导弹制导技术[M].北京:宇航出版社, 1988.。
引战配合可视化仿真关键技术研究
引战配合可视化仿真关键技术研究
在引战配合仿真中,利用可视化仿真技术可以直观地计算与显示弹目交会、引信探测与启动、战斗部起爆、杀伤场形成与飞散、杀伤元命中及毁伤目标的整个过程。
通过改变仿真参数,可以计算和分析不同制导误差、不同交会参数条件下战斗部对目标的毁伤概率和引战配合效率,进而实现对导弹引战系统性能的评估与引战系统参数优化设计。
论文首先对OpenGL及其在引战配合仿真中的应用进行了分析,应用天空盒和模拟地形技术构建了仿真系统的背景,并对系统的场景漫游与视点跟踪功能进行研究与实现。
基于引战配合可视化仿真对目标模型的要求,对适用于引战配合可视化仿真的目标模型数据格式进行了研究。
通过开发系统原型对模型数据格式进行比较,确定了满足引战配合可视化需求的建模软件以及相应的数据格式。
在易损性数据分析时采用了XML格式,并针对系统需求开发了3dsMax导入插件,以支持与其它格式的转换。
在引战系统模型的研究过程中,首先分析了弹目交会模型,包括对空交会模型和半实物仿真时的滑轨交会模型,然后建立了通用的引信探测启动模型与战斗部杀伤场模型,之后分析了起爆控制策略并讨论了目标毁伤模型,最后对交会过程中的关键算法进行了分析。
本文以Viusal Studio 2010作为开发环境,基于MFC+OpenGL等编程技术,开发了引战配合可视化仿真软件,并对仿真系统的主要功能应用进行了讨论。
地面雷达和飞行器的电子对抗仿真研究
地面雷达与飞行器的电子对抗仿真研究李舰华祖耀杨湘玉(国防科技大学机电工程与自动化学院,长沙.410073)摘要:为了提高部队战斗力,进行群体协同训练和战怯研究,达到总体的作战目标,井把战法研究和训法研究放在~个虚拉的战场环境里进行.仿真的武器系统可通过联网加入虚拟战场,分布式交互仿真正是为满足这一需求在九十年代蓬勃发展起来的一项仿真技术。
利用分布式交互仿真技术的自饴性和扩展性,可把若干武器模拟器联网组成虚拟战场.分布交互仿真(DIS)是九十年代蓬勃发展起来的一项新的仿真技术。
它采用协调一致的结构、标准、协议和数据库,通过局域弼和广域隔将分敏在各地的仿真设备互连交互作用,并且人也可参与交互作用的一种综合环境。
论文完成了刨建雷达操作手模拟训练环境的研究:研究和实现了雷达操作手在对抗性环境下进行模拟训练的过程;在雷达模拟器和空袭摸拟方的微机上动态显示摸拟训练的过程;在雷达模拟器的微机屏幕上迁可看到在雷达可视范围内的三维场景。
关键词:D】S;模拟训练;雷达模型;雷达侦察模型;电子干扰模型;地物回波模型;雷选盲区;PDU:OpenGL:半现实虚拟环境TheStudyinSimulationforElectronicOpposingofRadaringroundandAircraftLiJianHuaZuyaoYangXiangyuLiuBaohong(Instituteo['eleen'omc-mcchanical∞ginccnngandautom越ioo.N埘。
啮lUniversity。
f矗抽雠1tchn01q斟,Changsha.410073the洲csandtestthem11"1aAbstract:Inordertoimprovethebattleeffectiveness,weneedresearchvirtualbattlefieldenvironment.whichsimulatedweaponsystem㈨intn'connectto。
引战配合系统三维可视化仿真研究
引战配合系统三维可视化仿真研究
本文依据引战配合理论,从系统的观点,分析了破片式战斗部导弹的引战配合过程,综合引信系统、战斗部系统和目标系统之间信息,得到引战配合效率的计算模型。
根据引信的触发线方程,定义引信的触发时刻,并结合目标和破片的一些参量,得到了最佳延迟时间。
描述了目标易损性。
详细分析了破片的静态和动态的飞散特性,得到了破片动态飞散计算模型。
结合引战配合过程,介绍了引战配合可视化仿真所涉及的主要内容,提出了一种基于OpenGL的引战配合三维可视化仿真实现的方法,重点介绍了建立导弹和目标的三维实体模型以及破片命中检测算法和命中目标投影球算法,描述了引战配合三维可视化仿真的流程,并且提出了实体动画的实现方法。
陆基导弹打击航母的数学建模与算法设计(2018.4.8)

陆基导弹打击航母的数学建模与算法设计摘要对航空母舰作战是当前许多国家都在研究和探讨的一个课题,据有关资料表明,航空母舰在对付反舰导弹打击方面,还没有很好的办法,因此设计反舰导弹飞行轨迹的数学模型及其命中目标的算法就显得尤为重要。
本文以运动学、微积分学等知识为理论体系,结合Hermite插值法,运用化曲为直的思想,借助MATLAB、Excel软件对导弹飞行的轨道曲线进行了系统的研究分析,提出了反舰导弹打击目标的新思路。
对于问题一:以导弹发射车和航母所在的平面为研究对象,通过分析导弹发射段、中段与末段的衔接点,结合Hermite插值法,得到导弹初始位置与航母坐标之间的轨道曲线模型。
对于问题二:在问题一的背景下,本文创新性地提出一种新的解决方案,即:不改变问题一的导弹发射轨道,而是通过改变导弹发射车的偏转角度,对经过计算航母即将到达的点发射导弹进行攻击,以达到准确击中航母的目的。
在该条件下,求出导弹飞行的总时间。
考虑到导弹轨道的不变性,为了减少误差,我们在计算时间时忽略掉了导弹末段的飞行时间,而将其作为航空母舰移动后导弹自主搜索目标、选择攻击对象的时间。
对于问题三:在实际操作过程中由于制导误差和非制导误差等一系列误差,导弹发射后往往难以准确打击目标,故我们对导弹的轨道曲线的误差分析作了讨论,并对问题二中的误差——导弹发射车的偏转角度进行了一系列的系统的误差分析,并计算出了在不同程度的误差下,导弹的平均命中率。
在建模的过程中,本文创新性地采用了化曲为直的思想,简化了数学模型,巧妙地运用了Hermite插值多项式,保证了导弹飞行轨道曲线是连续的,并综合Excel和MATLAB 两大平台的运算特性,在数据处理以及图像绘制方面得到了较为精确的结果。
关键词:反舰导弹 MATLAB Hermite插值法常微分方程化曲为直目录一.问题重述 (1)二.模型假设 (1)三.符号说明 (2)四.模型的建立与求解 (3)4.1.1问题一的分析 (3)4.1.2模型的建立与求解 (3)4.2.1问题二的分析 (7)4.2.2模型的建立与求解 (7)4.3.1问题三的误差分析 (9)4.3.2问题三的命中率分析 (10)五.模型的评价与改进 (12)5.1模型的评价 (12)5.2模型的改进 (12)六.参考文献 (13)七.附录 (14)一问题重述无论是在军事演习中还是在实战中,各类防空导弹的运用早已屡见不鲜,但如何将导弹既快又精准地击中目标,以及有效拦截敌方导弹,成为制胜的关键。
(仿真法)模拟导弹追击问题

模拟法(仿真法)解决导弹追击问题专业班级:09港航一班组队成员:蔡畅,蒋承超追踪问题发射导弹的甲舰位于坐标原点(0,0),发现乙舰时,乙舰位于(1,0),并沿与y轴正向相平行方向直线行驶。
此刻,甲舰立即发射导弹,该导弹能在发射后的任何时刻都对准目标。
假设导弹速度为b,乙舰速度为a,(且b/a=5)试问导弹在何时、何地击中乙舰,并用动画演示导弹追击乙舰的过程。
摘要建立平面直角坐标系,通过对导弹运动轨迹和乙舰运动轨迹的分析,在导弹发射后的任何时刻导弹都对准目标,导弹做曲线运动,乙舰做直线运动,当导弹运动轨迹和乙舰运动轨迹相交时,即导弹击中乙舰。
要求导弹运动轨迹,建立仿真模型,根据给定的条件,对该模型求解,运用MATLAB软件求出数值解和解析解。
模型假设(1)导弹射出后的任意时刻,导弹头始终对准乙舰。
(2)导弹与乙舰均做匀速直线运动。
问题分析(仿真算法)乙舰初始位在点A(m,0),方向为平行于y 轴正方向, 导弹的初始位在点B(0,0),t=t (k )乙舰的位置:乙舰的位置:(m,a*t(k)) 导弹的位置:(xk,yk) 追赶方向可用方向余弦表示为: 22)()1(1cos k k k kk y at x x -+--=α22)()1(sin k k k kk k y at x y at -+--=α,1时t t t t k k ∆+==+------(时间步长)到导弹的位置).,(11++k k y x 则 ∆≈∆=-+,cos 1k k k k t b x x x αk k k k t b y y y αsin 1∆≈∆=-+第一步:设置时间步长t ∆,速度a, b 及初始位置0,0,000===k y x 第二步:计算动点导弹在时刻 t t t k k ∆+=+1时的坐标 221)()1(1k k k kk k y at x x tb x x -+--∆+=+221)()1(k k k kk k y at x y at tb y y -+--∆+=+计算乙舰在时刻 t t t k k ∆+=+1时的坐标 )~,~(11++k k y x0~1=+k x )(~1t t a y k k ∆+=+第三步:计算导弹与乙舰这两个动点之间的距离: 211211)~()~(++++-+-=k k k k k y y x x d根据事先给定的距离,判断导弹是否已经追上了乙舰,从而判断退出循环还是让时间产生一个步长,返回到第二步继续进入下一次循环;第四步:当从上述循环退出后,由点列 ),(11++k k y x 和)~,~(11++k k y x 可分别绘制成两条曲线即为导弹和乙舰走过的轨迹曲线。
战术导弹系统仿真研究
战术导弹系统仿真研究第一章:引言随着现代技术的不断进步和发展,军事领域的武器装备也在不断的升级和更新。
因而,战术导弹系统的仿真研究也变得越来越重要。
战术导弹系统是现代战争中不可或缺的武器装备之一,具有制导精度高,毁伤能力强等特点,对其仿真研究具有重要意义。
本文将探讨战术导弹系统的仿真研究,包括系统概述、仿真模型建立、仿真验证等内容,旨在为战术导弹系统的研究提供参考。
第二章:系统概述战术导弹系统是现代战争中不可或缺的武器装备之一,在军事、国防等领域都具有重要意义。
战术导弹系统主要由以下几部分组成:1.导弹本体:导弹本体是整个导弹系统的核心部分,主要是由导弹机体、弹载电子设备、武器部件等组成,能够实现空中发射和机动飞行。
2.发射平台:发射平台是导弹系统的重要组成部分,主要包括导弹发射装置、导弹发射架、导弹控制系统等。
3.控制指挥中心:控制指挥中心是导弹系统的核心控制部分,主要由中心指挥部和各级指挥机构组成,能够全面掌控导弹系统的运行。
在实际应用中,战术导弹系统需要进行实时仿真模拟,以确保其有效性和可靠性。
下面将详细介绍战术导弹系统的仿真模型建立和仿真验证。
第三章:仿真模型建立战术导弹系统的仿真模型建立是整个仿真研究的核心部分,主要分为以下几个步骤:1.建立导弹本体模型导弹本体是整个导弹系统的核心部分,需要构建其仿真模型。
导弹本体的仿真模型应包括导弹气动模型、弹载电子设备仿真模型、武器部件仿真模型等。
2.建立发射平台模型发射平台是导弹系统的重要组成部分,需要构建其仿真模型。
发射平台的仿真模型应包括导弹发射装置仿真模型、导弹发射架仿真模型、导弹控制系统仿真模型等。
3.建立控制指挥中心模型控制指挥中心是导弹系统的核心控制部分,需要构建其仿真模型。
控制指挥中心的仿真模型应包括中心指挥部仿真模型、各级指挥机构仿真模型等。
以上三个步骤是建立战术导弹系统仿真模型的主要内容。
下面将介绍仿真模型的验证方法。
第四章:仿真验证战术导弹系统的仿真验证是确保仿真模型有效性和可靠性的重要方法,主要包括以下几个方面:1.对比实验对比实验是仿真验证的主要方法之一。
反舰导弹电子对抗措施分析仿真研究

1反舰巡航导弹可采用的电子对抗措施1.1弹载有源干扰措施有源干扰,顾名思义,就是为了制止或削减敌方使用电磁频谱,借助电子干扰机进行干扰的方式。
根据这一干扰的原理,有源干扰分为两种:引导是干扰;回答式干扰。
在实际运用中,这两种干扰方式都会对敌方雷达探测巡航导弹产生重大影响。
1.1.1引导式干扰机引导式干扰机多数是噪声干扰机,可产生瞄准式、阻塞式和扫频式干扰。
噪声干扰能遮盖各种形式的雷达信号,具有多种干扰效果,几乎对任何雷达系统都有效,而且不易反干扰,因此,现在和将来噪声调制干扰机都将是数量多、用途广、威力大的干扰机类型。
1.1.2回答式干扰虽然噪声干扰对各种雷达都有良好的干扰效果,但缺乏欺骗性,雷达一受干扰就会发觉,此时雷达虽不能探测目标,但可以测出干扰机的方向,对干扰源定位,并用火力摧毁。
回答式欺骗干扰机能快速、自动、准确地对雷达施放欺骗性干扰。
欺骗式干扰主要用来对付搜索与跟踪雷达。
它发射的信号和雷达接收机收到的信号非常相似,但功率要高得多。
回答式干扰机按射频系统的形式分为放大回答式,也称转发式;振荡回答式,也称应答式两种类型。
放大回答式干扰机的特点是将接收到的微弱雷达射频脉冲信号放大到足够强的功率,然后再发射出去,因而保证了干扰在频率上的瞄准。
由于放大回答式干扰机有设备简单、体积小、质量轻、操作方便,适用于欺骗各种雷达等特点,因此很适合装载在导弹或飞机上。
振荡回答式干扰机主要以假目标方式来欺骗雷达或导弹导引头,即通过调谐电路将发射机的振荡频率快速调谐到所截获的雷达信号频率上,经欺骗调制后发射出去。
以实现掩护真实目标的目的。
1.2有源拖拽式干扰有源拖拽式电子干扰诱饵是一种十分有效的电子欺骗技术,因为现代雷达与导弹很容易区别缓慢的箔条和快速的飞机或导弹,却不容易分辨在速度、距离等特征几乎与飞机或导弹相同的诱饵。
与复杂的机载干扰机设备相比,有源诱饵具有体积小、成本低、结构简单的优点,已成为各国重点发展、研制和装备的一种电子干扰系统。
对地面活动目标轰炸方法的研究与仿真
对地面活动目标轰炸方法的研究与仿真
李克己;聂志强
【期刊名称】《电光与控制》
【年(卷),期】2002(009)003
【摘要】提出了两种对地面活动目标轰炸的方法,并在MATLAB环境下进行了动态仿真.两种方法以CCRP和CCIP瞄准原理建立数学模型.采用这两种方法均可通过在现有机载火控软件中增加少量软件而具备对地面活动目标的轰炸能力.
【总页数】7页(P23-29)
【作者】李克己;聂志强
【作者单位】中国航空工业洛阳电光设备研究所,河南洛阳,471009;中国航空工业洛阳电光设备研究所,河南洛阳,471009
【正文语种】中文
【中图分类】V271.44;TJ414
【相关文献】
1.歼击轰炸机对地面固定目标投弹误差分析 [J], 吴晓君;王昌金
2.基于HHT的地面活动目标定位方法的研究 [J], 孙洁娣;温江涛;靳世久
3.一种UCAV对地面活动目标的攻击方法研究 [J], 李晓曦;周德云;何鹏
4.地面坦克目标红外仿真方法研究 [J], 范梦萍;张瑜;徐华;钱芸生
5.地面炮兵火力打击集群装备目标毁伤仿真方法研究 [J], 王广彦;石全;尤志锋因版权原因,仅展示原文概要,查看原文内容请购买。
R-77导弹引信导控一体化系统的分析与仿真
R-77导弹引信导控一体化系统的分析与仿真导弹复合制导技术和导控一体化技术是现代导弹的发展趋势,复合制导涉及到的初制导、中制导及末制导弹道交接班的设计和导控一体化技术涉及到的起爆控制算法的改进是提高导弹引战配合效率的主要最有效途径,这些技术是通过计算机、信号处理和数学等工具来实现的。
我国在这些技术领域还处于理论研究和试验阶段,分析和研究国外较为成熟的复合制导技术及导控一体化技术的原理和实现过程,对其吸收、改进和利用,发展我国的复合制导技术理论,研究新型复合制导导弹,以缩短国内外的差距,有着重要的战略意义。
课题以集复合制导技术和导控一体化技术于一身的R-77导弹作为复合制导和导控一体化系统分析与仿真的实例,通过对R-77导弹复合制导过程的分析,给出了一种弹道交接班方案;在分析R-77导弹弹-目交会过程的基础上,采用了改进后与之相适应的卡尔曼滤波算法对弹-目交会信息进行了滤波,运用滤波后的弹-目交会信息推算了R-77导弹的最佳起爆角和最佳起爆时延,即起爆控制算法,接着建立了R-77导弹导控一体化系统仿真模型,并对各模块进行了分析;然后简述了导弹引信系统定时器的工作过程,根据R-77导弹定时器的参数,对其定时器用FPGA进行了模拟,将得到的定时信号用于后面章节的导控一体化系统仿真的同步信号,最后分析和设定了R-77导弹导控一体化系统仿真所需要的初始化参数,搭建了R-77导弹导控一体化系统仿真平台,依据初始化参数进行弹道交接班方案、改进的起爆控制算法以及R-77导弹导控一体化系统仿真,验证了交接班方案的有效性和合理性;将改进前和改进后起爆控制算法得到的最佳起爆角和最佳起爆时延的理想值和预测值进行对比,参照相关文献资料给出的R-77导弹参数,改进后的起爆控制算法包含的最佳起爆角和最佳起爆时延更趋向于理想值,验证了改进后的起爆控制算法的有效性,从而验证了导控一体化系统仿真平台的合理性。
【数学建模】导弹发射追击问题的数学模型

数学建模竞赛承诺书我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。
我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。
我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。
如有违反竞赛规则的行为,我们将受到严肃处理。
我们参赛选择的题号是(从A/B中选择一项填写): A我们的队号为:27参赛队员:1. 唐路明2. 季凯3. 闻莺指导教师或指导教师组负责人:数模组日期: 2009 年 8 月 11 日评阅编号(由评阅老师评阅前进行编号):数学建模竞赛编 号 专 用 页评阅编号:导弹发射追击问题的数学模型摘要本文对导弹发射追击敌机问题进行了求解和计算机模拟,以微分方程为理论基础,根据题目要求,提出基本假设,建立合理的模型,并通过分析在给定不同速度条件下的轨迹方程,得到发射空对空和地对空两种导弹击毁敌机的条件。
问题(1),建立微分方程模型,化二阶方程为一阶方程,从而得到导弹轨迹的解析表达式11211()()2111k k n n x nx kn y kn k n k+---⎡⎤=-+⎢⎥+--⎣⎦,发射该种空对空导弹击中敌机的k 的条件范围是 (0, ),k 为飞机速率与导弹速率之比。
同时利用MATLAB7.0仿真,对导弹追踪敌机的过程进行了计算机检验和模拟,所得结果与所求相符。
问题(2),首先,建立三维空间直角坐标系,在任意时刻t 确定了导弹和飞机的空间位置坐标后,将导弹速度分解,再根据高度与水平距离比值不变的关系, 将问题转化为二维平面直角坐标系上的追击问题。
然后与问题(1)的处理相似, 用差微分方法即可得导弹的轨迹112112111/k k n x n x y k n k n k z hx n+-⎧⎡⎤--⎛⎫⎛⎫=---⎪⎢⎥ ⎪ ⎪+--⎝⎭⎝⎭⎨⎢⎥⎣⎦⎪=⎩,最后再对两者 速度比值进行讨论后,得发射该种地对空导弹击毁敌机的k 的条件范围是(0,2m)。
弹道仿真中的数值计算方法研究_梁建波

(12)
0
yi+2 =yi+1 +h1 [g21(f xi+1 ,y(xi+1))+g22(f xi ,y(xi))+ g23(f xi-1 ,y(xi-1))+g24(f xi-2 ,y(xi-2))]
0
yi+2 =yi+1 +h1 [g′21(f xi+2 ,yi+2)+g′22(f xi+1 ,y(xi+1))+ g′23(f xi ,y(xi))+g′24(f xi-1 ,y(xi-1))]
(8)
它与一般的阿当姆斯外插法插值多项式相同,用 L(3 x)代
替 (f x,y(x)),便得到 y(xi+1)的一个近似值 yi+1,即
乙xi+1
y(xi+1)=y(x)i + L(3 x)dx xi
(9)
作变量代换,令 x=xi+th1,将 y(x)i 改为 yi,且由式(8),可得
第一步外插公式为:
导弹落点纵横向偏差和仿真时间与仿真步长的关系主动段仿真被动段仿真纵向偏差横向偏差仿真时间步长步长h1s0505146268051014690405151471330520149684通过以上仿真结果可以验证为了满足实时仿真的需要在导弹被动段飞行中仿真步长可适当增大而误差变化却很小当模拟打靶100次进行统计分析时被动段仿真步长为10时的仿真时间比仿真步长为05时的总仿真时间减少约172s而落点纵横向偏差分别仅为0603m因此利用变步长积分和条件函数求零的方法可有效地开展导弹飞行仿结束语利用阿当姆斯变步长积分公式可以在弹道仿真中的任意节点处根据给定的误差要求来改变仿真步长同时结合条件函数求零的方法解算弹道可以验证仿真计算的精好虽然对于一次弹道计算来说仿真效率改进并不显著但若对弹道参数进行统计分析和给出精度评定时则仿真效率有明显的提高
导弹三维建模及飞行仿真
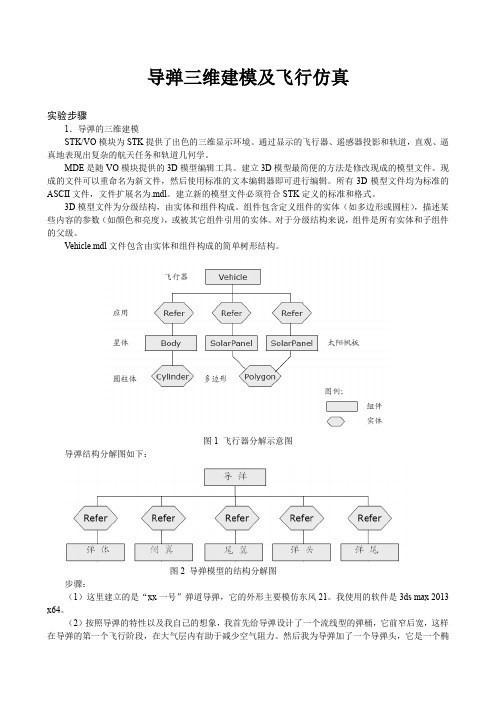
导弹三维建模及飞行仿真实验步骤1.导弹的三维建模STK/VO模块为STK提供了出色的三维显示环境。
通过显示的飞行器、遥感器投影和轨道,直观、逼真地表现出复杂的航天任务和轨道几何学。
MDE是随VO模块提供的3D模型编辑工具。
建立3D模型最简便的方法是修改现成的模型文件。
现成的文件可以重命名为新文件,然后使用标准的文本编辑器即可进行编辑。
所有3D模型文件均为标准的ASCII文件,文件扩展名为.mdl。
建立新的模型文件必须符合STK定义的标准和格式。
3D模型文件为分级结构,由实体和组件构成。
组件包含定义组件的实体(如多边形或圆柱),描述某些内容的参数(如颜色和亮度),或被其它组件引用的实体。
对于分级结构来说,组件是所有实体和子组件的父级。
V ehicle.mdl文件包含由实体和组件构成的简单树形结构。
图1 飞行器分解示意图导弹结构分解图如下:图2导弹模型的结构分解图步骤:(1)这里建立的是“xx一号”弹道导弹,它的外形主要模仿东风21。
我使用的软件是3ds max 2013x64。
(2)按照导弹的特性以及我自己的想象,我首先给导弹设计了一个流线型的弹桶,它前窄后宽,这样在导弹的第一个飞行阶段,在大气层内有助于减少空气阻力。
然后我为导弹加了一个导弹头,它是一个椭球的一半。
然后在这个半椭球和弹桶之间还有一节小的固定装置。
其实这个固定装置是控制中心并且它里边还有调整弹头姿态以及在再入段多次进入大气层用的制动装置。
然后我为导弹尾部加了四个喷口。
紧接着我为导弹加了四个尾翼。
其实对于弹道导弹来说它的意义不大,这里主要是为了帅。
最后我为我的“xx 一号”加上了帅气的天蓝色迷彩使它更具观赏性。
如图:(3)想将在3dsmax里制作的模型应用于stk并不是一件轻松的事情。
首先,我们要利用3dsmax将做好的模型导出成.obj格式。
这样,他就能被一些3d模型转换软件(例如deep exploration)所读取。
如图:其实deepexploration是可以支持.3ds和.max格式的。
导弹飞行虚拟现实仿真系统的研究的开题报告

导弹飞行虚拟现实仿真系统的研究的开题报告一、研究背景随着现代科技的快速发展,导弹作为一种常见的战争武器,其运用范围与效用越来越广泛。
如何提高导弹的命中率,不仅是发展现代军事技术的需要,更是保障国家安全的必要手段。
而导弹飞行虚拟现实仿真系统正是以现代计算机技术为基础,通过数字仿真技术对导弹飞行过程进行模拟,从而最大限度提高导弹的精确度,实现导弹的精确打击。
二、研究目的本研究旨在构建一种基于导弹飞行虚拟现实仿真的系统,通过建立仿真环境,实现对导弹发射、飞行过程进行模拟,进而提高导弹的命中率,为现代军事技术的发展做出一定的贡献。
三、研究内容与研究方法本研究的具体内容包括:1. 设计仿真环境:根据导弹发射、飞行的实际情况,设计相应的仿真环境,包括气象环境、地形环境、条件环境等。
2. 建立导弹模型:将导弹的物理特性、动力特性等进行建模,实现导弹的飞行参数计算,如速度、高度、方向等。
3. 构建导弹飞行虚拟现实仿真系统:以Unity3D为基础,通过开发导弹发射、飞行、命中等模块,实现导弹飞行过程的真实模拟。
4. 进行仿真试验:通过对导弹飞行仿真系统进行测试,对其进行验证,以此提高导弹的命中率。
研究方法主要包括文献研究、实验研究、数值模拟等。
四、研究意义研究结果可以为军事科技的提升做出一定的贡献,在采取军事行动时,可通过该系统预测导弹的轨迹,判断导弹的打击范围,提高导弹的威力和精度,提高军事指挥的准确性和效率,同时也可为军事教育、战术研究等提供参考与支持。
五、预期结果通过该研究,期望可以开发出一款较为完备的导弹飞行虚拟实验系统,实现对导弹飞行过程的预测和控制,提高导弹的精准打击能力,为现代军事技术的发展做出一定的贡献。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( A F E U , Mi s s i l eI n s t i t u t e , S h a a n x i S a n y u a n7 1 3 8 0 0 ,C h i n a )
+ 中图分类号: T J 7 6 1 1 3 ; T P 3 9 1 9 文献标志码: A 文章编号: 1 0 0 9 0 8 6 X ( 2 0 0 8 ) 0 2 0 0 3 9 0 5
D i g i t a l S i mu l a t i o no f aC e r t a i nMi s s i l eF u z eWa r h e a dMa t c h i n g
0 引 言
引战配合的数字仿真是指利用已获得的物理仿
收稿日期: 2 0 0 7 - 1 0 - 0 7 ; 修回日期: 2 0 0 7 - 1 1 - 3 0 作者简介: 韩 明( 1 9 8 2 - ) , 男, 河北秦皇岛人。硕士生, 研究方向为防空导弹引战配合。 通信地址: 7 1 3 8 0 0 陕西省三原 2 5号信箱研究生 1队 E ma i l : h a n s o n 1 1 0 @1 6 3 . c o m
v / 2 . λ s =F d
( 2 )
在导引头失控前, 相对运动速度始终指向目标, 相对运动速度与弹 目 联 线 的 夹 角 很 小, 即弹目之间 距离远大于脱靶量, 则近似有弹目视线速度等于弹 目相对速度。所以 v 2 . λ/ r =F d ( 3 ) 相对 速 度 与 弹 轴 的 夹 角 Ω r及 在 弹 体 坐 标 系 中 的方 向 角 γ , 代 表 了 破 片 飞 散 方 位 的 不 对 称 性, Ω r r 角愈大, 引战配合就愈困难, 需要测 量 Ω , γ r r 角 并采 用启动区方位调整式补偿的办法来提高效率。如图 2所示, 设导 引 头 天 线 为 先 高 低、 后 方 位 的 顺 序, 并 且天线的转轴按欧 拉 顺 序 进 行 转 换, 设视线方向与 弹纵轴夹角为 Ω , 在以导引 头天线 为 中 心 的 弹 体 坐 r 标系中的方位角为 γ , 则 r c o s s i nβ β a a c o s c o s c o s , c o s , Ω ε β γ r= a a r= s i nΩ r s i nγ r= i nβ -s a . s i nΩ r ( 4 )
速度矢量的方向基本一致, 即 ′ , ′ . Ω Ω γ γ r= r r= r
· ·4 1 韩 明, 简金蕾, 任宏滨: 地面防空导弹引战配合数字仿真研究 导引头外框转轴, 它与 x m 轴和 y m 轴满足右手 法则。 x 即 目 标 视 线 方 向; y a 轴为导引 头 天 线 指 向, a轴设 为导 引 头 内 框 转 轴; z a轴与 x a轴和 y a轴满足右手 法则, 它在 内 框 平 面 内 与 O x y 原点为 a a 平 面 垂 直; O 。外框为高低 转 框, 内 框 为 方 位 转 框。 根 据 脱 靶 方向角与视线角速度矢量方向角的关系, 即 c o s , , ω β ε ω ε y m = a a z m = a
A b s t r a c t : Wi t ht h ed e v e l o p m e n to f a n t i a i r c r a f t m i s s i l et e c h n i q u ea n dt h er e n e w a l o f t h ew e a p o n ,i t p u t s f o r w a r dt h eh i g h e r r e q u e s t t ot h eu s eo f t h ea n t i a i r c r a f t m i s s i l e ,t r a i n i n ga n dt h ea p c o n t i n u o u s l y p l i c a t i o ns i m u l a t i o nt e c h n i q u e .T h i s t e x t a i m s a t t h ea n t i a i r c r a f t w e a p o nm a t e r i a l ,a n a l y z e s t h ek e yt e c h n i q u eo f t h ef u z ew a r h e a dm a t c h i n g .A t t h ef i r s t ,t h em a t h e m a t i c a l m o d e l o f f u z ew a r h e a dm a t c h i n gi s f o u n d e d ,a n dt h e ni n t r o d u c e dt h ed i g i t a l s i m u l a t i o ns y s t e m .T h ed y n a m i co p e r a t i o np r o c e s so f t h ef u z e , w a r h e a da n dt a r g e t a r es i m u l a t e d ,t h es i m u l a t i n gr e s u l t i s g i v e n .T h ed y n a m i ck i l l i n gr a n g eo f w a r h e a d ' s f r a g m e n t s a n dt h e f r a g m e n t d i s t r i b u t i o no f h i t t i n g t a r g e t a r e g r a p h i c a l l y d i s p l a y e d ,w h i c hc a nd i r e c t l y s h o w t h ef u z ew a r h e a dm a t c h i n ge f f e c t .I t p r o v i d e s t h er e f e r e n c e dp a r a m e t e r t or a i s et h ee f f i c i e n c yo f t h ef u z e ,a n di t a l s op l a y s a ni m p o r t a n t r o l ei nr a z i n gf u n c t i o no f t h ew e a p o ns y s w a r h e a dm a t c h i n gi nt h ef u t u r e t e m . Ke yw o r d s : a n t i a i r c r a f t m i s s i l e ;f u z ew a r h e a dm a t c h i n g ;s i m u l a t i o n 真和打靶等其他实验结果, 建立数学模型, 在计算机 上模拟引战配合的全过程。数字仿真与物理仿真相 比, 其优点 在 于 它 可 以 模 拟 物 理 仿 真 很 难 模 拟 的 情
导引头首先提供弹目相对运动速度信息。设导 引头中心的脱靶量 为 ρ , 导引头中心距离目标为 R , 则视线速度为 v c o s =v c o sa r c s i n θ s =v r r ρ (R )].
[
( 1 )
对于主动式脉冲多普勒导引头来说有
1 建立模型
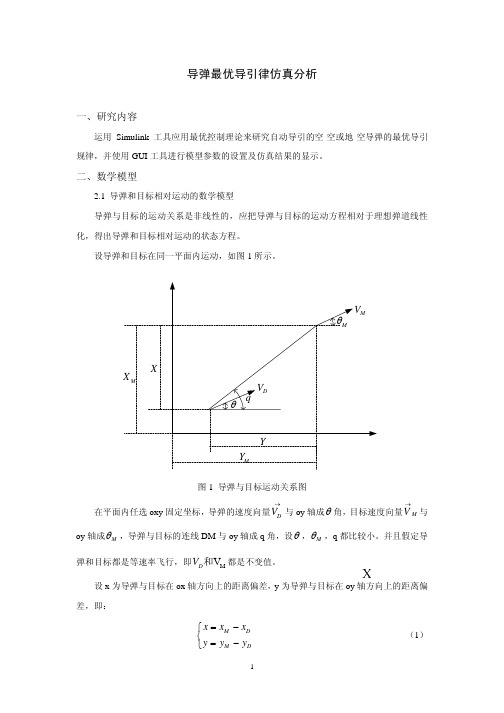
根据目 标 在 弹 体 坐 标 系 中 的 交 会 图 ( 图 1所 示) , A点为引信天线中心, O点为导弹 战斗 部 中心, O A之 间 的 距 离 为 L T为 引 信 天 线 探 测 点, J为 目 m; 标的中心( 几何中心) ; T J 之间的距离为 L ; θ 0 T 为弹 目连线与 飞 机 运 动 方 向 之 间 的 夹 角。 目 标 沿 弹 道 J F H B飞行。导引头首先探测出目标 方位 角 为 γ , 导 弹经 延 迟 时 间 τ后 起 爆 战 斗 部, 此时目标到达 F 点, 经时间 t 后, 目 标 中 点 在 H点 被 导 弹 的 破 片 击 中。建立引信接收和信息处理模型、 弹目交会模型、 战斗部破片飞散模型等。
由于导引头天 线 总 是 对 准 目 标Байду номын сангаас方 向, 为了使导 弹命中目标, 在遭遇 前 相 对 速 度 方 向 亦 应 近 似 对 准 目标方向, 因此天线 轴 方 向 与 弹 体 坐 标 系 内 的 相 对
图1 目标在弹体坐标系中的交会图 F i g . 1 T h ee n c o u n t e rs i t u a t i o no f mi s s i l et a r g e t
导弹技术
地面防空导弹引战配合数字仿真研究
韩 明, 简金蕾, 任宏滨
( 空军工程大学 导弹学院, 陕西 三原 7 1 3 8 0 0 )
摘 要: 防空导弹技术的迅速发展和武器装备的不断更新, 对防空导弹的训练应用仿真技术提 出了较高的要求, 着眼于地面防空武器, 分析了引战配合的 关 键技 术, 首先建立引战配合的数学模 型, 然后在此基础上介绍防空导弹引战配合仿真系统, 最后 对引信、 战斗部和目标的作用过程进行 动态仿真, 给出了仿真结果以及战斗部破片的动态 飞散区 域图形。直 观 显 示 出 引 战 配 合 的 效 果 和 对目标的毁伤程度。为日后进一步提高引战配合效率提供 了参数 依 据, 在提高防空武器系统的性 能上具有重要意义。 关键词: 防空导弹;引战配合;仿真
[ 1 ]
T点的坐标如下: x c o s y s i nβ c o s , β+L γ T =R m, T =R z s i nβ s i nγ , T =R 式中: R为引信探测的 弹 目 距 离; β为 引 信 天 线 主 瓣 倾角; L γ m 为 引 信 天 线 中 心 与 战 斗 部 中 心 的 距 离; 为导引头探测的目标方位角。 迎击时目标几何中心 J 点的坐标如下: x s i nθ , y c o s s i nφ , θ J =x T +L 0 T J =y T -L 0 T T z c o s c o s . θ φ J =z T -L 0 T T 1 . 1 相对速度矢 量 v r与弹轴的夹角 Ω r及在弹体