GPS浮动车数据时间间隔优化方法
GPS定位误差的产生原因分析与减小方法
GPS定位误差的产生原因分析与减小方法引言:在现代社会,全球定位系统(Global Positioning System,GPS)已经成为了人们生活中不可或缺的一部分。
无论是导航、交通监控还是地理信息系统等领域都离不开GPS定位技术。
然而,随着GPS定位的广泛应用,人们也逐渐发现定位误差问题的存在。
本文将从GPS定位误差产生的原因入手,探讨解决这一问题的方法。
一、GPS定位误差的原因分析:1. GPS系统误差:GPS系统本身存在着一些系统误差,例如卫星钟差、伪距观测误差、大气延迟等。
这些误差会直接影响到GPS定位的准确性。
2. 空间几何因素:GPS定位需要至少4颗卫星进行定位计算,卫星的位置和空间几何分布对定位精度有着重要影响。
当卫星分布不均匀或存在遮挡物时,会导致定位误差增大。
3. 电离层和大气影响:电离层和大气中的湿度、温度等因素都会对GPS信号产生影响,导致信号传播延迟或折射,从而引起定位误差。
4. 载波相位等伪距测量误差:GPS定位是通过测量卫星发射的信号和接收器接收的信号之间的时间差来计算位置的。
然而,由于载波相位的波长较短,测量精度更高,但受到多普勒效应的影响,会产生伪距测量误差。
二、减小GPS定位误差的方法:1. 多路径效应抑制:多路径效应是指GPS信号在传播过程中发生反射、散射等现象,致使接收器接收到多个信号,在信号合成过程中引入误差。
为了减小多路径效应,可以利用天线设计和信号处理技术,选择适合的接收天线和增加抗多路径干扰的算法。
2. 差分定位:差分定位是通过引入一个参考站与基准站的距离进行辅助定位,利用参考站的精确位置和信号传播速度信息来对GPS定位结果进行修正。
差分定位可以大幅度减小系统误差和信号传播误差的影响,提高定位精度。
3. 增加卫星数量和分布:通过增加卫星数量和改善卫星的空间分布,可以提高GPS定位的可见卫星数目和几何配置,从而减小定位误差。
可以使用卫星信噪比、可视卫星数等指标来优选卫星,并避开存在遮挡物的区域。
GPS测量数据处理质量评价与优化方法
一
4 4一
中国新技术新产 品
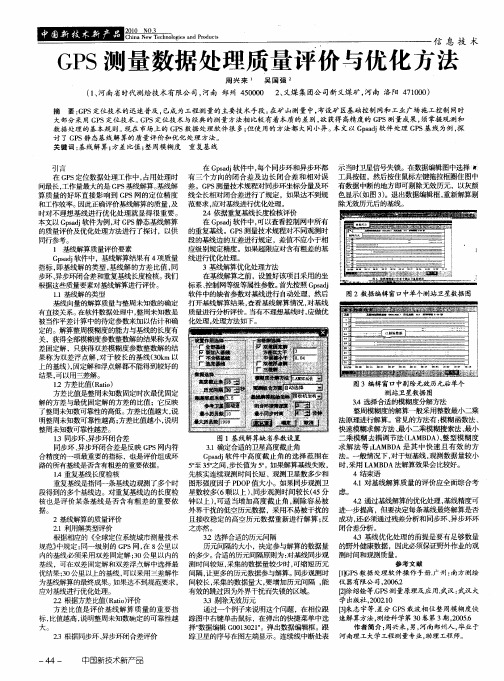
图 3编辑 窗口中剔除无效历 元后 单个
测站 卫 星 数 据 图
方差 比 值是整周未知数固定时次最优固定 解 的方差与最优 固定解的方差的 比值 ;它反映 了整周未知数可靠性的高低。 方差 比 值越大 , 说 明整周未知数可靠性越高 ; 方差比值越小 , 说明 整周未知数可靠性越差 。 1 - 3同步环 、 异步环 闭合差 同步环 、 异步环 闭合差是反 映 G S 内符 P网 合精度 的一项最重要 的指标 ,也是评价组成环 路 的所有基线是否含有粗差的重要依 据。 1 4重复基线长度检 核 重复基线是指 同一条基线边观测 了多个时 段得到 的多个基线边 。对重复基线边的长度检 核 也是评 价某条 基线 是否 含有粗 差 的重要 依 据。 2基线解算的质量评价 2 利用解类型评价 1 根据相应 的 《 全球定位系统城市测量技术 规范》 中规定 : 级别 的 G S网 , 8 同一 P 在 公里 以
1 - 2方差 比值( t ) Rai o
在 G sd软件 中, 个同步环 和异步环都 示 当时卫星信号失锁 。在数据编辑 图中选择 paj 每 然后按住 鼠标左键 拖拉框圈住 图 中 有三 个方 向 的闭合差及 边长 闭合 差 和相对 误 工具按 钮 , 差 。G S P 测量技术规程对同步环坐标分量及环 有 数据中断的地方即可剔除无效历元 ,以灰颜 线全长相对闭合差进行 了规定 ,如果达不到规 色显示 ( 如图 3。退 出数据编辑框 , ) 重新解算剔
引言
在GS P 定位数据处理 工作 中, 占用处理 时 间最长, 工作量最大 的是 G S P 基线解算。 基线解 算质量 的好坏直 接影响 到 G S网的定位 精度 P 和工作效率 。 因此正确评价基线解算的质量 , 及 时对不理想基线 进行优化处 理就显得很 重要 。 本文以 G sd软件为例 , G S paj 对 P 静态基线解算 的质量评价及优 化处理 方法进行 了探 讨 ,以供 同行参考 。 1 基线解算质量评价要素 G sd软件中,基线解算 结果有 4 paj 项质量 指标 , 即基线解 的类型 , 基线解 的方 差 比值 , 同 步环 、 异步环闭合差和重复基线长度检核。 我们 根据这些质量要素对基线解算进 行评价 。 1 . 1基线解的类 型 基线 向量 的解算质量与整 周未知数 的确 定 有直接关 系。 在软件数据处理中 , 整周未知数 是 被 当作平差计算 中的待定 参数来加以估 计和确 定 的。解算整周模 糊度 的能力 与基线的长度有 关 ,获得全部模 糊度参数 整数 解的结果 称为双 差 固定解 ,只获得双差模 糊度参 数整数解的结 果称 为双差浮点 解 , 对于较 长的基线 (0 m以 3k 上 的基线 )固定解和浮点解都不能得 到较好的 , 结果 , 可以用三差解。
GPS轨迹优化算法

GPS轨迹优化算法现代社会中,全球定位系统(GPS)已经成为我们日常生活中不可或缺的一部分。
通过GPS技术,我们能够方便地实现路径导航,找到最佳路线,提高出行效率。
然而,由于众多因素的影响,GPS定位数据可能存在一些误差。
为了提高路径规划的准确性和效率,有必要对GPS轨迹进行优化分析。
本文将介绍GPS轨迹优化算法的基本原理和应用。
在降低定位误差方面,可以采取以下几种方式。
首先,通过增加接收设备的天线数量或者采用高精度的天线来提高接收机灵敏度,以增加接收到的卫星信号强度。
其次,可以通过差分定位技术,利用接收到的参考信号进行误差校正,提高定位的准确性和精度。
另外,可以利用地面参考站对GPS数据进行后处理,进一步提高定位的精度和稳定性。
在路径规划优化方面,可以采取以下几种算法。
首先,可以采用最小生成树算法,通过计算各个GPS点之间的距离和权重,得到一个最优路径,使得路径长度最小。
其次,可以利用遗传算法,通过模拟生物进化过程,不断优化路径并找到最佳解。
此外,还可以通过动态规划算法,将路径规划问题转化为最优子结构的问题,通过递推求解最优路径。
最后,还可以利用模拟退火算法,通过模拟金属退火过程,不断调整路径,以达到最优解。
GPS轨迹优化算法的应用非常广泛。
在交通领域中,可以利用GPS轨迹优化算法,对城市道路进行拥堵分析和优化,提高交通效率。
在物流领域中,可以利用GPS轨迹优化算法,对货物的配送路径进行优化,提高物流效益。
在旅游领域中,可以利用GPS轨迹优化算法,规划最佳旅游路线和景点参观顺序,提高旅行体验。
综上所述,GPS轨迹优化算法在路径规划和定位精度方面起着重要作用。
通过降低定位误差和优化路径规划,我们可以提高出行的效率和准确性。
随着技术的不断发展,GPS轨迹优化算法将进一步完善和应用到更多的领域中,为人们的出行和生活带来更多的便利和舒适。
论GPS测量的数据处理方法及其优化方式
论GPS测量的数据处理方法及其优化方式。
一、GPS测量数据处理方法1、数据预处理GPS数据预处理包括了资料收集、数据筛选、数据校正、数据过滤、数据插值等步骤。
其中最重要的步骤是数据校正,由于GPS卫星所发出的信号在传输过程中会遭受导航信号、地球大气层、接收机时间、传输媒介等干扰,导致GPS采集的数据有较大的误差,因此需要对GPS数据进行校正。
数据校正包括了数据预处理、误差模型建立、误差分析和校正方法等步骤。
2、数据处理GPS数据处理主要包括了基准的选择和建立、数据分析和拟合、解算算法和数据融合等步骤。
基准的选择和建立是指在数据处理过程中需要明确使用的基准坐标系,例如WGS84坐标系、北京54坐标系等。
数据分析和拟合是指采用数学模型对GPS数据进行处理,例如最小二乘法、卡尔曼滤波、粒子滤波等方法。
解算算法与数据融合主要是指将GPS数据与其他信息进行融合,例如地图数据、气象数据、传感器数据等。
二、GPS测量数据处理优化方式1、信号接收优化GPS信号接收优化是指改善信号接收的操作和环境,例如改善接收机本身的性能、选用合适的天线、改善接收机自身的环境、减少信号干扰等。
2、误差模型优化误差模型建立是将误差分为多个部分,例如常数误差、轨道误差、大气误差、接收机误差等,然后对各部分误差采用不同的方法进行模拟和处理。
误差模型的优化一方面是对误差模型进行精细化建模,另一方面是通过分析误差来源和数据特性来对误差模型进行改进和优化。
3、算法优化GPS数据处理算法的优化可以从多个方面入手,例如减少计算量,提高算法计算速度和鲁棒性,改进算法的精度和可靠性,例如采用粒子滤波算法可以有效地解决非线性滤波问题。
4、数据融合优化数据融合是将不同数据源的数据信息综合起来,以提高得到的GPS数据的精度和可靠性,并提高研究结果的确定性和可靠性。
数据融合的优化可以通过改进融合算法、改善数据质量和改进数据采集的设计等来实现。
5、差分处理差分GPS是基于两个接收机之间的同步观测数据得到相对的精密定位,其可以有效地消除接收机和卫星的共同误差,以实现高精度的测量。
GPS导航数据处理与精度控制技巧

GPS导航数据处理与精度控制技巧GPS(Global Positioning System)是一种广泛应用于导航、地理测量等领域的技术。
随着技术的不断进步,GPS导航的精度也在不断提高。
本文将从数据处理和精度控制两个方面探讨GPS导航的相关技巧。
一、数据处理技巧1. 数据收集与预处理GPS导航系统通过接收卫星信号获取位置、速度等数据,因此数据收集是首要步骤。
在收集数据之前,需确保设备正常工作,接收器位置周围没有遮挡物以保证信号质量。
此外,还需注意时间同步,以确保采集的数据能准确匹配。
在数据收集之后,预处理也是不可或缺的。
预处理是对收集到的原始数据进行校正和滤波等操作,以消除误差和噪声的影响。
常见的预处理方法包括差分处理和滤波处理。
2. 差分处理差分处理是通过接收两个或多个接收器的信号,并比较它们的差异来减小定位误差的一种方法。
差分GPS数据处理技术能够提高导航的精度,尤其适用于需要高精度定位的应用领域。
常见的差分处理方法包括实时差分和后处理差分。
实时差分是指在实时接收GPS信号时,通过与距离较远但位置固定的参考站进行比对,并利用差分数据进行校正。
后处理差分则是在离线状态下对收集到的数据进行处理,通常需要使用专业软件进行。
3. 滤波处理滤波处理是一种通过数学方法对GPS数据进行平滑处理的技术。
滤波的目的是去除数据中的噪声,减小误差对最终结果的影响。
常用的滤波方法有卡尔曼滤波和滑动窗口滤波。
卡尔曼滤波是一种递归滤波技术,它根据观测数据和状态模型的概率分布,在每个时刻对系统状态进行估计和更新。
滑动窗口滤波则是利用一个固定大小的窗口来进行滤波,保留最近一段时间内的数据来估计位置和速度。
二、精度控制技巧1. 选择合适的接收器接收器的性能直接影响导航的精度。
选择适合自己需求的接收器非常重要。
高精度的接收器通常具有更好的信号接收能力和数据处理能力,可以提供更准确的导航结果。
同时,还需考虑接收器的可靠性、功耗、支持的卫星系统等因素。
全面GPS授时优化解决方案
Cell Conbination Technology and Application of TD-SCDMA NetworkShi Hao Zhang Sheng(China Mobile Communications Corporation,Beijing 100032)AbstractThe article introduces the basic theory,application scenes and advantages to traditional solutions according to varies application scenes above of the cell combination technology in TD-SCDMA network.At the end of the article,the application of cell combination in TD-SCDMA commercial network is refered.The Cell Combination technology refered in this article is with great signi cance in construction of TD-SCDMA network rapidly.Keywor dsTD-SCDMA,cell combination,high quality network,KPI(收稿日期:2010年8月9日)全面GPS 授时优化解决方案贾思远孙伟(中国移动通信集团公司北京100032)摘 要 针对GP S 系统目前存在的工程施工,以及可能出现的天线遮挡以及接收机缺陷等问题,提出了全面的GPS 授时优化解决方案。
关键词 GPS 授时优化GP S/北斗光纤拉远卫星授时失步告警失步检测1引言T D-SCDMA 是要求严格同步的移动通信系统,目前TD-SCDMA 系统采用美国全球定位系统GPS 进行授时同步,但GPS 授时系统存在一些需要考虑的问题,如施工不灵活、拉远受限以及安全性等问题。
导航卫星系统精确定位算法优化方法归纳
导航卫星系统精确定位算法优化方法归纳导航卫星系统是现代社会不可或缺的重要工具。
为了实现精确定位,需要优化导航卫星系统的算法。
本文将归纳几种优化方法,包括差分定位、多路径效应抑制、卫星选择与权重分配、同步与非同步定位方法。
一、差分定位差分定位是一种常用的导航卫星系统精确定位算法优化方法。
它利用多个接收器接收同一组卫星信号,并通过相对测量的方式消除接收器之间的误差。
差分定位算法包括两种方式:实时差分定位和后差分定位。
实时差分定位通常用于实时导航和车辆自动驾驶等应用,而后差分定位则用于后处理数据,提高定位精度。
二、多路径效应抑制多路径效应是导航卫星系统中常见的问题,它由于信号的反射、绕射或干扰而引起,导致接收器接收到多个信号。
为了抑制多路径效应,可以使用反射和绕射信号的时间延迟差异、功率差异等信息进行滤波和校正。
此外,也可以利用天线设计和信号处理算法来降低多路径效应的影响。
三、卫星选择与权重分配卫星选择与权重分配是导航卫星系统精确定位算法中的一种重要方法。
在进行定位时,系统可以选择最佳的卫星组合来提高定位精度。
这需要考虑卫星的空间分布、信号强度、信号质量等因素,并使用合适的权重分配方法对卫星信号进行组合处理。
常用的卫星选择与权重分配方法包括最小二乘法、迭代加权法等。
四、同步与非同步定位方法同步与非同步定位方法是导航卫星系统精确定位算法中的两种不同的定位模式。
同步定位是指接收器和卫星之间的时间同步,通过精确的时间信息来计算定位结果。
而非同步定位则不需要时间同步,可以通过接收器和卫星之间的相对距离以及接收时间信息来计算定位结果。
同步定位精度较高,但需要更复杂的硬件和算法支持,非同步定位则更为简单。
综上所述,导航卫星系统精确定位算法的优化方法包括差分定位、多路径效应抑制、卫星选择与权重分配、同步与非同步定位方法等。
这些方法可以提高导航卫星系统的定位精度,并广泛应用于车辆自动驾驶、航空航天、海洋导航等领域。
未来的研究可以进一步探索和优化这些方法,以满足不断发展的导航需求。
GPS数据处理参数设置及基本手段
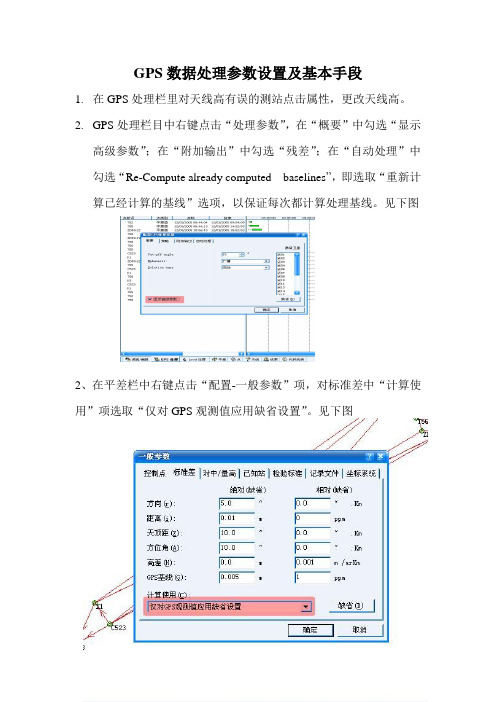
GPS数据处理参数设置及基本手段1.在GPS处理栏里对天线高有误的测站点击属性,更改天线高。
2.GPS处理栏目中右键点击“处理参数”,在“概要”中勾选“显示高级参数”;在“附加输出”中勾选“残差”;在“自动处理”中勾选“Re-Compute already computed baselines”,即选取“重新计算已经计算的基线”选项,以保证每次都计算处理基线。
见下图2、在平差栏中右键点击“配置-一般参数”项,对标准差中“计算使用”项选取“仅对GPS观测值应用缺省设置”。
见下图3、在“GPS处理栏”中全部选择,进行处理,在“结果”栏中得到每一条基线处理结果,在模糊度状态为是的情况下进行存储,然后逐个对基线点右键进行“分析”,得到如下图所示残差结果,注意在“类型”中选“双差”、在“相位”中选“L2”或“L1”,观察标准差值,一般为2~5cm为正常,否则应在卫星窗口中对标准差大的卫星的时间段适当进行剔除修改。
修改完毕还应重新处理比对残差结果。
4、一般来说GPS成果如果一次性通过平差,F检验较小或是较为理想,则没有太多必要对卫星进行修改,毕竟在基线较多时,修改工作量较大,但效果并不十分明显。
理论上F检验值越小平差结果越可靠,但同时网和环平差结果中的指标才是规范中规定的硬指标。
注:网平差结果中的GPS基线向量残差数据中的“残差PPM”为:残差/边长*1000000。
如何解决工程测量中大面积GPS控制网因椭球因素造成精度损失的问题1、在84坐标系统下进行基线解算、平差、得到84经纬度坐标;2、新建投影,采用高斯投影,中央子午线应选用离隧道中间最近的,不一定要正好是3度带或1.5度带的整带度数,带宽可有1.5或1度,东方向加上500公里。
3、新建坐标系,坐标系投影采用第2步新建的投影,椭球采用北京54椭球;4、新建项目,将第3步新建的坐标系赋予该项目。
在新建项目中新建控制点,采用地方坐标中的大地坐标,选用“经度、纬度、高程”格式,高程采用正常高,即实际标高。
GPS定位算法优化设计

GPS定位算法优化设计GPS(全球定位系统)是一种通过接收卫星信号来确定地理位置的技术。
在现代生活中,GPS已经广泛应用于导航、地图、军事、汽车和航空领域等众多领域。
为了提高GPS的定位准确度和稳定性,不断优化和改进GPS定位算法至关重要。
首先,优化GPS定位算法可以通过改进信号处理技术来提高定位准确度。
传统的GPS定位算法主要基于接收到的卫星信号强度来计算定位位置,但这种方法容易受到多径效应等干扰因素的影响。
为了克服这些问题,可以采用多普勒效应相关的信号处理技术,如快速傅里叶变换(FFT)和卡尔曼滤波器。
这些技术能够准确计算接收器与卫星之间的距离,提高定位准确度。
其次,引入辅助信息可以进一步提高GPS定位算法的性能。
辅助信息可以是地理数据、卫星预报数据等。
例如,在城市或高楼大厦密集的地区,GPS信号容易被阻塞或反射,导致定位不准确。
此时,可以借助地理数据来校正定位结果,提高定位精度。
另外,卫星预报数据可以提供卫星位置和时钟偏差等信息,帮助改进卫星信号的接收和解析过程,从而进一步提高定位精度和稳定性。
同时,根据使用环境的特点,对GPS定位算法进行参数调整也是优化的重要手段。
例如,在移动通信或车载导航等动态环境中,对定位的实时性要求较高。
针对这种情况,可以通过减少计算复杂度、增加数据采样频率等方式提高算法的实时性,确保用户能够及时获得准确的定位信息。
此外,对于静态环境下的GPS定位,可以通过适当增加算法的收敛时间,进一步提高定位的稳定性。
另一方面,优化GPS定位算法还可以通过加强协作定位技术来改善性能。
协作定位是指多个接收器相互通信并通过互相提供辅助信息来共同完成定位任务的技术。
通过接收其他接收器的定位信息或辅助信息,可以更准确地计算自身的定位结果。
此外,协作定位还可以通过分布在不同位置的接收器之间的通信来实现位置校正和互相验证,提高整个系统的鲁棒性和可靠性。
最后,为了持续优化GPS定位算法,针对不同的使用场景和需求,采用机器学习等智能化方法进行算法优化也是一个有前景的方向。
测绘技术中GPS定位的使用技巧与优化方法
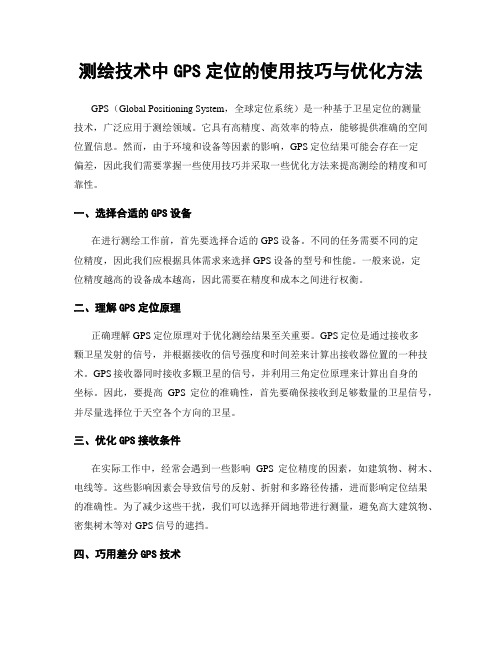
测绘技术中GPS定位的使用技巧与优化方法GPS(Global Positioning System,全球定位系统)是一种基于卫星定位的测量技术,广泛应用于测绘领域。
它具有高精度、高效率的特点,能够提供准确的空间位置信息。
然而,由于环境和设备等因素的影响,GPS定位结果可能会存在一定偏差,因此我们需要掌握一些使用技巧并采取一些优化方法来提高测绘的精度和可靠性。
一、选择合适的GPS设备在进行测绘工作前,首先要选择合适的GPS设备。
不同的任务需要不同的定位精度,因此我们应根据具体需求来选择GPS设备的型号和性能。
一般来说,定位精度越高的设备成本越高,因此需要在精度和成本之间进行权衡。
二、理解GPS定位原理正确理解GPS定位原理对于优化测绘结果至关重要。
GPS定位是通过接收多颗卫星发射的信号,并根据接收的信号强度和时间差来计算出接收器位置的一种技术。
GPS接收器同时接收多颗卫星的信号,并利用三角定位原理来计算出自身的坐标。
因此,要提高GPS定位的准确性,首先要确保接收到足够数量的卫星信号,并尽量选择位于天空各个方向的卫星。
三、优化GPS接收条件在实际工作中,经常会遇到一些影响GPS定位精度的因素,如建筑物、树木、电线等。
这些影响因素会导致信号的反射、折射和多路径传播,进而影响定位结果的准确性。
为了减少这些干扰,我们可以选择开阔地带进行测量,避免高大建筑物、密集树木等对GPS信号的遮挡。
四、巧用差分GPS技术差分GPS技术是一种通过基准站校正GPS接收器误差的技术。
通过同时观测基准站和移动站的GPS信号,可以计算出两者之间的卫星信号误差,并通过无线电或互联网将校正数据传输到移动站,从而提高定位的精度。
差分GPS技术相对于普通GPS技术而言更加精确可靠,尤其适用于需要高精度定位的测绘工作。
五、合理安排观测方案观测方案的合理安排可以有效提高GPS定位的精度和可靠性。
首先,需要合理选择观测时间段,避免天气恶劣或信号干扰较大的时候进行测量。
GPS定位误差的产生原因分析与减小方法

GPS定位误差的产生原因分析与减小方法导言全球定位系统(GPS)已成为现代社会中广泛应用于导航、地理测量和定位等领域的重要技术。
然而,在使用GPS时,我们常会遇到定位误差的问题。
本文将分析GPS定位误差产生的原因,并探讨减小定位误差的方法。
一、多普勒效应引起的频率偏移误差GPS定位是通过接收来自卫星的信号并测量其到达时间来确定位置的。
然而,卫星和接收器之间的运动会引起多普勒效应,导致接收器测量的信号频率偏离真实频率。
这会导致接收器估计的距离与实际距离之间存在误差。
为了减小多普勒效应带来的误差,可以采用快速信号处理算法和精确的频率模型来纠正频率偏移。
二、大气延迟引起的距离误差GPS信号在穿过大气层时会受到大气延迟的影响,从而导致接收器估计的距离与实际距离之间存在偏差。
大气延迟主要由电离层延迟和对流层延迟组成。
为了减小大气延迟带来的误差,可以通过使用多频信号进行差分定位、引入大气误差模型进行修正以及使用增强的大气改正模型来提高定位精度。
三、钟差引起的时间误差卫星和接收器的时钟不可能完全同步,这会导致接收器估计的时间与实际时间之间存在差异。
这个差异会引起接收器估计的距离与实际距离之间的误差。
为了减小时钟差带来的误差,可以使用差分定位技术来修正时间误差,并利用接收器内部的时间校准机制来提高时钟的准确性。
四、多径效应引起的信号衰减误差当GPS信号在传播过程中发生反射或折射时,会产生多径效应,导致接收器接收到的信号变弱或出现多个传播路径,从而影响定位精度。
为了减小多径效应带来的误差,可以采用抗多径干扰技术,如采用天线阵列、时延估计和信号处理算法等来抑制多径干扰。
五、精度限制引起的测量误差GPS接收器自身的精度限制也会导致定位误差。
接收器的硬件设计和信号处理算法的精度限制都会影响最终的定位精度。
为了减小精度限制带来的误差,可以采用高精度的接收器硬件设计和先进的信号处理算法,以提高定位的准确性。
六、综合多种减小误差方法为了进一步提高GPS定位的精度,可以综合应用上述减小误差的方法。
GPS轨迹优化算法
GPS轨迹优化算法GPS轨迹优化算法是一种用于改善GPS轨迹数据的算法,旨在提高数据质量和准确性。
GPS轨迹数据是由GPS设备记录的用户移动路径数据,主要用于路线规划、位置定位和运动轨迹分析等应用中。
然而,由于GPS设备存在误差和干扰,导致轨迹数据中可能包含噪声和不确定性,影响数据的可靠性和准确性。
为了解决这一问题,研究人员提出了各种GPS轨迹优化算法,以改善数据质量和准确性。
这些算法主要包括数据清洗、轨迹平滑、轨迹压缩和轨迹匹配等技术。
以下将介绍几种常见的GPS轨迹优化算法:1. 数据清洗(Data Cleaning):数据清洗是指对轨迹数据进行预处理,去除噪声和异常点,以提高数据的质量和准确性。
常见的数据清洗方法包括去除重复点、去除速度异常点、去除定位误差点等。
2. 轨迹平滑(Trajectory Smoothing):轨迹平滑是指对轨迹数据进行平滑处理,去除数据中的抖动和震荡,使得轨迹更加平滑和连续。
常见的轨迹平滑方法包括移动平均滤波、Kalman滤波、Bezier曲线拟合等。
4. 轨迹匹配(Trajectory Matching):轨迹匹配是指将采集到的实际轨迹数据与地图数据进行匹配,以提高轨迹数据的准确性和位置精度。
常见的轨迹匹配方法包括最近邻匹配、最小二乘匹配、动态时间规整匹配等。
除了上述算法外,还有一些其他辅助算法,如轨迹插值、轨迹分类、轨迹聚类等,也可以用于GPS轨迹优化。
这些算法可以根据具体应用需求进行组合和调整,以达到更好的轨迹优化效果。
在实际应用中,GPS轨迹优化算法可以有效提高数据的准确性和可靠性,有助于提升位置定位、路径规划和轨迹分析等应用的性能和效果。
未来,随着GPS技术的进一步发展和应用需求的提升,GPS轨迹优化算法将继续得到改进和完善,为广泛的应用场景提供更加可靠和精准的数据支持。
GPS轨迹优化算法
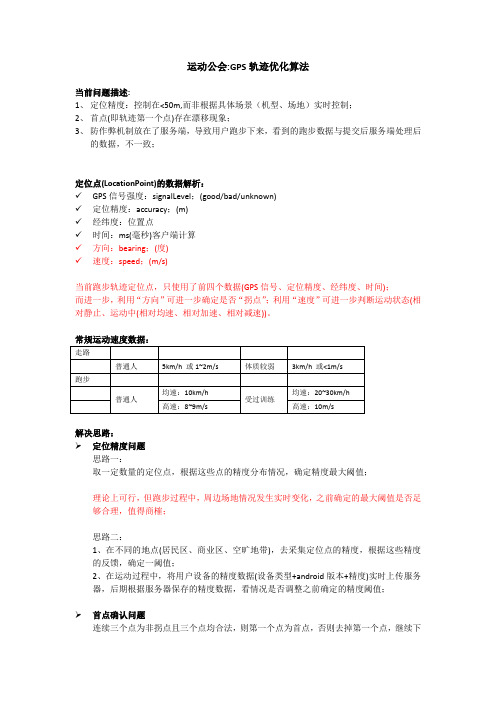
运动公会:GPS轨迹优化算法当前问题描述:1、定位精度:控制在<50m,而非根据具体场景(机型、场地)实时控制;2、首点(即轨迹第一个点)存在漂移现象;3、防作弊机制放在了服务端,导致用户跑步下来,看到的跑步数据与提交后服务端处理后的数据,不一致;定位点(LocationPoint)的数据解析:✓GPS信号强度:signalLevel;(good/bad/unknown)✓定位精度:accuracy;(m)✓经纬度:位置点✓时间:ms(毫秒)客户端计算✓方向:bearing;(度)✓速度:speed;(m/s)当前跑步轨迹定位点,只使用了前四个数据(GPS信号、定位精度、经纬度、时间);而进一步,利用“方向”可进一步确定是否“拐点”;利用“速度”可进一步判断运动状态(相对静止、运动中(相对均速、相对加速、相对减速))。
解决思路:➢定位精度问题思路一:取一定数量的定位点,根据这些点的精度分布情况,确定精度最大阈值;理论上可行,但跑步过程中,周边场地情况发生实时变化,之前确定的最大阈值是否足够合理,值得商榷;思路二:1、在不同的地点(居民区、商业区、空旷地带),去采集定位点的精度,根据这些精度的反馈,确定一阈值;2、在运动过程中,将用户设备的精度数据(设备类型+android版本+精度)实时上传服务器,后期根据服务器保存的精度数据,看情况是否调整之前确定的精度阈值;➢首点确认问题连续三个点为非拐点且三个点均合法,则第一个点为首点,否则去掉第一个点,继续下面三个点进行下一步计算,直到找到首点。
首点合法的依据:1、三个点在精度阈值范围内;2、三个点的方向相对一致,即不存在拐点;3、根据点与点之间的距离和时间间隔,计算其运行速度,该速度在合理的跑步速度范围之内;4、连续三个点,满足以上条件,则第一个点为首点;5、否则继续去掉第一个点,继续下面三个点进行计算,直至满足前三个条件为止,确定首点;➢提交数据不一致将防作弊机制放在客户端,服务端只记录原始数据,不做进一步的数据处理。
全球定位系统导航算法优化与误差分析
全球定位系统导航算法优化与误差分析全球定位系统(GPS)作为一种全球性卫星导航系统,广泛应用于车辆导航、航空航天、地理测量和物流等领域。
然而,由于各种环境因素和技术限制,GPS导航算法存在一定误差。
因此,优化GPS导航算法并进行误差分析是提高导航定位精度和可靠性的关键研究方向。
一、GPS导航算法优化1. 多路径效应的优化多路径效应是GPS定位误差的一个主要来源,主要由卫星信号在衍射和反射时的路径延迟引起。
为了减小多路径误差,可以采用以下优化策略: - 增加接收机的天线高度,使其不易接收到反射信号。
- 使用抗多路径的天线或增加滤波技术,抑制掉多路径信号。
- 利用多天线阵列接收信号,通过信号处理算法消除多路径效应。
2. 定位算法的优化GPS定位算法主要包括传统的PVT(位置-速度-时间)算法和增强型定位算法(例如差分GPS和扩展卡尔曼滤波器等)。
为了提高定位算法的性能,可以采用以下优化方法:- 引入更精确的地球模型和构建更准确的卫星位置和钟差模型。
- 加入其他传感器数据,如惯性测量单元(IMU),来提供更准确的定位结果。
- 优化卫星选择策略和接收机的天线姿态控制,以选择可见卫星并增加解算精度。
3. 系统时钟误差的优化系统时钟误差是导航精度的主要限制因素之一,主要包括卫星钟差和接收机钟差等。
为了减小时钟误差对定位的影响,可以进行以下优化: - 主动校准系统时钟,通过收集其他时间参考源的数据进行时钟校准。
- 接收仪器采用更精密的时钟,如使用铯钟或氢钟。
- 设计时钟同步机制,实现卫星和接收机之间的时钟同步。
二、GPS导航算法误差分析1. 建立误差模型为了对GPS导航算法的误差进行分析,需要建立误差模型。
一般来说,GPS导航算法的误差包括以下几个方面:- 定位误差:由于信号传播延迟、钟差、多路径效应等因素引起的定位误差。
- 速度误差:由于跟踪误差、测量误差等因素引起的速度误差。
- 时间误差:由于GPS卫星钟差、接收机钟差等因素引起的时间误差。
GPS浮动车数据时间间隔优化方法
s的ILTT 数据,结果 如 表 1 所 示,据 此 实 例 验 证
DSI优 化 方 法 。
当 DSI等于1s时,ILTT 的 精 度 很 高,可 以
采用此时获得的ILTT 近似作为其他 DSI对应的
ILTT 真实值。 按 照 式 (1)算 出 的 不 同 DSI对 应
的ILTT 平均 绝 对 相 对 误 差 计 算 结 果 见 表 2 所
示。ILTT 的平均绝对相对误差随着 DSI增 加 的
变化情况如图2所示。
图1 GPS-FC 系统的逻辑框架 Fig.1 The logical structure of GPS-FC system
2 DSI优化
2.1 优 化 方 法 目前 的 GPS 接 收 装 置 能 以 1s 间 隔 测 算
本文利用 GPS浮动车(GPS Floating car,GPS- FC)系 统,获 取 充 足 的 单 车 路 段 行 程 时 间 (Individual link travel time,ILTT)实 测 数 据,并 且 选 择 合 理 的 数 据 质 量 评 价 指 标 ,采 用 统 计 分 析 手 段 设计 DSI与 DTI的优化方法。
择ILTT 的平均绝对相对误差作为评价交通信息
精度的定 量 指 标,据 此 确 定 最 优 DSI。 依 据 下 式
计算ILTT 的平均绝对相对误差:
∑ α =
n
1 n i=1
→
|Ti -→ Ti|×100% Ti
(1)
式中:α 为 ILTT 的 平 均 绝 对 相 对 误 差;T实 值;n 为 用 以 DSI
表1 ILTT 数据提取结果(s) Table 1 Link travel time of individual floating car(s)
GPS数据时间跳变的修正方法
GPS数据时间跳变的修正方法
刘晓杰
【期刊名称】《交通与运输》
【年(卷),期】2022(38)4
【摘要】针对GPS数据时间跳变问题引起的行程时间、行程速度以及车辆运行状态变化识别等指标的计算错误,提出基于轨迹连线的时间跳变点修正方法。
修正过程主要包括依据时间变量对GPS数据排序、跳变点识别并编号、跳变点修正以及修正效果评价。
以西安市出租车GPS数据为例,进行验证。
研究结果表明,经过该方法修正后,数据中跳变错误点的比例从原始的6.5%降至0.5%,车辆轨迹连线偏离度由7.0%降至1.3%,该方法修正效果好,有效提高了指标计算的准确性以及基于该指标研究的准确性,具有一定的借鉴意义。
【总页数】4页(P43-46)
【作者】刘晓杰
【作者单位】广州市交通运输研究院有限公司
【正文语种】中文
【中图分类】U491
【相关文献】
1.一种基于数据跳变检测的高动态环境GPS信号参数估计方法
2.利用GPS时间传递数据修正接收机天线坐标
3.kinect深度数据随机跳变误差分析及修正算法研究
4.利用GPS时间传递数据修正接收机天线坐标
5.基于位跳变检测提高GPS信号处理增益方法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
gps实现常稳时钟校正的方法
gps实现常稳时钟校正的方法
GPS实现常稳时钟校正的方法是利用GPS信号中的时间信息
校正时钟的偏差。
以下是具体步骤:
1. 接收GPS信号:使用GPS接收器接收卫星发射的信号。
2. 提取时间信息:从GPS信号中提取出卫星发送的时间信息,包括卫星发射时间和到达时间。
3. 计算传播时间:通过卫星发射时间和到达时间之间的差异计算出信号传播的时间。
4. 比较本地时钟:将计算出的传播时间与本地时钟进行比较,得出时钟的偏差。
5. 校正时钟:将时钟的偏差应用于本地时钟,对时钟进行校正。
6. 持续校正:不断地接收和处理GPS信号,以保持时钟的准
确性。
可以利用多个卫星的信号进行校正,提高准确度。
需要注意的是,GPS信号会受到各种影响,如大气影响、建
筑物阻挡等,可能会导致接收到的时间信息不准确。
因此,在实际应用中,通常会使用更复杂的算法来对时间信息进行滤波和平滑处理,以提高校正的准确性和稳定性。
GPS导航技术的定位源码优化与算法改进
GPS导航技术的定位源码优化与算法改进随着科技的不断发展,全球定位系统(GPS)已经成为人们生活中不可或缺的一部分。
无论是日常生活中的导航服务,还是专业领域中的航空、海洋导航等,GPS定位技术发挥着重要作用。
然而,由于各种因素的影响,GPS定位存在一定的误差,如信号衰减、有遮挡物、多径效应等。
为了提高GPS定位的准确性和可靠性,需要对其定位源码进行优化,并改进定位算法。
一、GPS定位源码优化优化GPS定位源码有助于提高定位的速度和准确性。
下面列举了一些常见的优化策略:1. 信号处理:在接收到GPS信号后,对信号进行处理,去除噪音和干扰,提取出有效的信号。
这可以通过滤波算法、卡尔曼滤波器等方法实现。
优化的信号处理方法可以提高定位的精度和稳定性。
2. 数据处理:对GPS接收到的数据进行优化处理,包括数据解码、数据校正等。
优化数据处理可以提高数据的可靠性和准确性。
此外,可以通过增加冗余数据、使用差分定位等方法,进一步提高定位的精度和可靠性。
3. 多星定位:利用多颗卫星同时进行定位,可以提高定位的精度和覆盖范围。
在进行多星定位时,需要对多星信号进行合理的融合,并考虑星座几何结构和各颗卫星的时间戳等因素。
4. 地面站布局优化:在进行GPS定位时,地面站的布局对定位的精度和覆盖范围有着重要影响。
优化地面站的布局,使其符合最佳覆盖的要求,可以提高整个系统的定位性能。
二、定位算法改进除了优化定位源码外,改进定位算法也是提高GPS定位准确性的关键。
当前常用的GPS定位算法主要有传统定位算法、差分定位算法和扩增现实定位算法,以下为各种算法改进的展示:1. 传统定位算法改进:传统定位算法通常使用卫星的测量信息进行定位计算。
改进的传统算法可以在计算精度和速度方面进行优化,例如采用迭代法、加权法等,提高算法的精度和收敛速度。
2. 差分定位算法改进:差分定位算法在GPS接收机和基准站之间进行差分计算,消除了大部分误差。
改进差分定位算法可以考虑更多的差分源,如虚拟差分站和多差分源,并进行有效的差分计算策略优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract:Aiming at the problem that the time intervals of sampling and transmitting of GPS data of the traffic information collection system based on the GPS equipped floating car were chosen by subjective experiences,and the related theoretical studies divoreed more or less from the practical application,judging indexes reflecting the relationship between the quality of the traffic information and the time intervals of GPS data sampling and transmitting were suggested,optimization methods were designed for these two time intervals and verified with measured data.The results showed that the best time intervals can be determined intuitively using the suggested methods,providing a reliable basis for the parameter setting of the GPS floating car traffic information collection system. Key words:engineering of communications and transportation;floating car;sampling interval; transmitting interval
1 GPS-FC 系统技术模块概述
GPS-FC 系统包含路网表达、GPS 预处理、地 图匹配和行程时间估算4个关键技术模块 。 [7-8]
路 网 表 达 是 针 对 数 字 地 图 化 简 、分 解 路 网 ,以 便满足交通信息 采 集 需 求 的 过 程;GPS 预 处 理 是 根据 GPS数据 的 特 点 修 正 GPS 误 差,从 而 提 高 GPS质量 的 过 程;地 图 匹 配 是 利 用 经 过 处 理 的 GPS与路网数据校 正 车 辆 行 驶 轨 迹 的 过 程;行 程 时间估算是利 用 经 过 匹 配 的 GPS 数 据 与 路 网 数 据估算系统最终输 出 结 果 的 过 程。GPS-FC 系 统 的逻辑框架如图1所示。
收 稿 日 期 :2009-12-23. 基 金 项 目 :“863”国 家 高 技 术 研 究 发 展 计 划 项 目 (2007AA11Z245);吉 林 大 学 研 究 生 创 新 基 金 项 目 (20101025). 作 者 简 介 :姜 桂 艳 (1964-),女 ,教 授 ,博 士 生 导 师 .研 究 方 向 :信 息 采 集 、处 理 与 应 用 .
s的ILTT 数据,结果 如 表 1 所 示,据 此 实 例 验 证
DSI优 化 方 法 。
当 DSI等于1s时,ILTT 的 精 度 很 高,可 以
采用此时获得的ILTT 近似作为其他 DSI对应的
ILTT 真实值。 按 照 式 (1)算 出 的 不 同 DSI对 应
的ILTT 平均 绝 对 相 对 误 差 计 算 结 果 见 表 2 所
导致所得交通信息的精度降低。
综上,交通信 息 的 精 度 与 信 息 的 采 集 成 本 是
优化 DSI应该 考 虑 的 关 键 因 素。 因 此,DSI优 化
的目的即是不仅能使交通信息的精度满足用户要
求,而且可以 尽 量 减 小 信 息 的 采 集 成 本。 本 文 采
用 GPS-FC 系 统 获 取 的ILTT 作 为 分 析 对 象,选
图2 ILTT 平均绝对相对误差的变化情况 Fig.2 The trend of average relative errors of ILTT
第6期
姜 桂 艳 ,等 :GPS 浮 动 车 数 据 时 间 间 隔 优 化 方 法
· 1515 ·
时刻
06:59:35 07:00:14 07:00:33 07:02:02 07:02:18 07:02:43 07:03:06 07:04:53 07:05:27 07:08:31 07:10:48 07:11:14 07:11:50 07:12:49 07:13:31 07:18:08 07:19:07 07:21:15 07:24:35 07:27:34 07:29:17 07:29:44 07:30:32 07:36:43 07:37:27 07:37:51 07:39:02 07:39:22 07:40:00 07:40:25 07:41:48 07:42:21 07:43:46 07:44:56 07:57:28 08:00:43
优化的ILTT 数量。
2.2 数 据 分 析
2008年 8 月 13 和 14 日,针 对 长 春 人 民 大
街、亚 泰 大 街、自 由 大 路 及 南 湖 大 路 部 分 路 段,运
用 GN-79N 型 GPS 接 收 机,进 行 了 GPS 数 据 采
集。 利用 GPS-FC 系统提取了 DSI等于1s至11
第 40 卷 第 6 期 2010 年 11 月
吉 林 大 学 学 报 (工 学 版 )
Journal of Jilin University (Engineering and Technology Edition)
Vol.40 No.6 Nov.2010
GPS 浮 动 车 数 据 时 间 间 隔 优 化 方 法
GPS 信 息 ,DSI越 小 ,越 能 准 确 跟 踪 车 辆 的 运 行 轨
迹,但若 DSI过小,车 辆 的 速 度 和 位 置 变 化 很 小,
此时对于交通信 息 质 量 的 提 高 作 用 不 大,反 而 提
高信息采集成本。如 果 DSI太 大,尽 管 能 够 减 少
信息采集成本,同 时 也 易 遗 漏 重 要 的 GPS 信 息,
Optimization method of time intervals of data for GPS equipped floating car
JIANG Gui-yan1,2,NIU Shi-feng2,CHANG An-de2,CONG Yu-liang3
(1.State Key Laboratory of Automotive Dynamic Simulation,Jilin University,Changchun130022,China;2.College of Transportation,Jilin University,Changchun 130022,China;3.College of Communication Engineering,Jilin University, Changchun130022,China)
表1 ILTT 数据提取结果(s) Table 1 Link travel time of indiviБайду номын сангаасual floating car(s)
2 126
37 19 88 16 24 23 103 35 182 135 26 34 59 42 14 28 126 199 179 101 25 48 371 41 23 71 19 36 26 81 32 83 70 14 29
示。ILTT 的平均绝对相对误差随着 DSI增 加 的
变化情况如图2所示。
图1 GPS-FC 系统的逻辑框架 Fig.1 The logical structure of GPS-FC system
2 DSI优化
2.1 优 化 方 法 目前 的 GPS 接 收 装 置 能 以 1s 间 隔 测 算
E-mail:jianggy@jlu.edu.cn
· 1514 ·
吉 林 大 学 学 报 (工 学 版 )
第 40 卷
处理 中 心 相 邻 2 次 接 收 GPS 信 息 相 差 的 时 间。 DSI与 DTI直接影响所得交通信息的精度和系统 成本。目 前,DSI与 DTI的 确 定 大 多 依 赖 主 观 经 验 。 由 于 工 作 人 员 的 实 际 经 验 存 在 差 别 ,导 致 做 出 的 选 择 不 尽 相 同[2-3]。 一 些 研 究 人 员 利 用 概 率 知 识 设计最优 DSI与 DTI的确定方法[2,4],然而因其没 有考虑各种交通管制手段以及不同交通状态的影 响,因此不 能 很 好 地 满 足 交 通 信 息 采 集 系 统 的 要 求。部分学者建议采用统计分析历史数据的方法 确定最优 DSI与 DTI[5-6],但 是 没 有 使 用 实 测 数 据 进行验证,难以判断所选评价指标是否合理。
本文利用 GPS浮动车(GPS Floating car,GPS- FC)系 统,获 取 充 足 的 单 车 路 段 行 程 时 间 (Individual link travel time,ILTT)实 测 数 据,并 且 选 择 合 理 的 数 据 质 量 评 价 指 标 ,采 用 统 计 分 析 手 段 设计 DSI与 DTI的优化方法。
择ILTT 的平均绝对相对误差作为评价交通信息
精度的定 量 指 标,据 此 确 定 最 优 DSI。 依 据 下 式
计算ILTT 的平均绝对相对误差:
∑ α =
n
1 n i=1
→
|Ti -→ Ti|×100% Ti