附合导线以及闭合导线方位角计算
闭合及附合导线测量内业计算方法
闭合及附合导线丈量内业计算方法(好东西)之老阳三干创作1.导线方位角计算公式当β为左角时α前=α后+β左-180°当β为右角时α前=α后-β右+180°2. 角度闭合差计算fβ=(α始-α终)+∑β左-n*180°fβ=(α始-α终)-∑β右+n*180°3. 观测角改正数计算公式Vβ=±fβ/ n若观察角为左角,应以与闭合差相反的符合分配角度闭合差,若观察角为右角,应以与闭合差相同的符合分配角度闭合差。
4. 坐标增量闭合差计算∑△X=X终-X始∑△Y= Y终-Y始Fx=∑△X测-∑△XFY=∑△Y测-∑△Y5. 坐标增量改正数计算公式VX=- Fx/∑D³DiVY=-FY/∑D³Di² ²所以:∑VX=- Fx ∑VY=- FY6. 导线全长绝对闭合差F=SQR(FX^2+FY^2)7. 导线全长相对闭合差K=F/∑D=1/∑D/F8. 坐标增量计算导线丈量的内业方法自己不才悉心整理出来的望能给同行业人士提供点资料(一)闭合导线内业计算已知A点的坐标XA=450.000米,YA=450.000米,导线各边长,各内角和起始边AB的方位角αAB如图所示,试计算B、C、D、E各点的坐标。
1角度闭合差:图6—8 闭合导线算例草图角度的改正数△β为:2、导线边方位角的推算BC边的方位角CD边的方位角AB边的方位角右角推算方位角的公式:(校核)3、坐标增量计算设D12、α12为已知,则12边的坐标增量为:4、坐标增量闭合差的计算与调整因为闭合导线是一闭合多边形,其坐标增量的代数和在理论上应等于零,即:但由于测定导线边长和观测内角过程中存在误差,所以实际上坐标增量之和往往不等于零而发生一个差值,这个差值称为坐标增量闭合差。
分别用暗示:缺口AA′的长度称为导线全长闭合差,以f暗示。
由图可知:图6—9 闭合导线全长闭合差导线相对闭合差。
测量,闭合导线等计算及表格
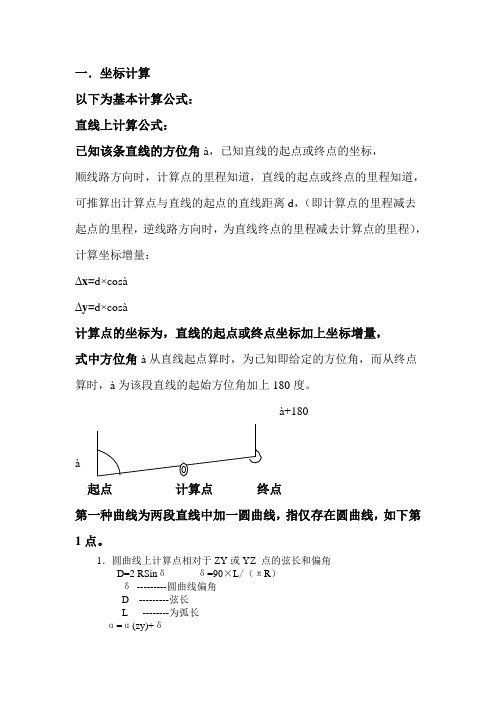
一.坐标计算以下为基本计算公式:直线上计算公式:已知该条直线的方位角à,已知直线的起点或终点的坐标,顺线路方向时,计算点的里程知道,直线的起点或终点的里程知道,可推算出计算点与直线的起点的直线距离d,(即计算点的里程减去起点的里程,逆线路方向时,为直线终点的里程减去计算点的里程),计算坐标增量:∆x=d×cosà∆y=d×cosà计算点的坐标为,直线的起点或终点坐标加上坐标增量,式中方位角à从直线起点算时,为已知即给定的方位角,而从终点算时,à为该段直线的起始方位角加上180度。
à+180à起点计算点终点第一种曲线为两段直线中加一圆曲线,指仅存在圆曲线,如下第1点。
1.圆曲线上计算点相对于ZY或YZ 点的弦长和偏角D=2 RSinδδ=90×L/(πR)δ---------圆曲线偏角D ---------弦长L --------为弧长α=α(zy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。
α=α(yz)-δα------------为计算点的方位角,此α为逆着线路方向计算时。
α(zy)、α(yz)---------为圆曲线的起始方位角。
一般为已知。
计算点相对与直圆点或圆直点的坐标增量:△x=D*COSα△y=D*SINα坐标增量计算完毕后,要算某一点的坐标,用直圆点或圆直点的坐标加上计算点与直圆点或圆直点的坐标增量,即为计算点的坐标。
缓和曲线同理。
第二种曲线为两段直线中始端加一缓和曲线,末端加一缓和曲线,两段缓和曲线中加一圆曲线,如下第2点。
2.缓和曲线上计算点相对于HY或YH点的弦长和偏角δ=L²/6RL0X1=L-(L^5/40R²L0²)Y1=L³/6RL0D=√(X1²+Y1²)α=α(hy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。
导线测量计算

坐标 (m)
X Y X Y
A
+8
43 17 12
B 180 13 36 180 13 44
-2 +2
1230.88 673.45
+8
43 03 28 124. 08 +90.66 +84.71 +90.64 +84.73
5 6
178 22 30 178 22 38
+8 193 44 00
193 44 08
+30.88 +141.29 +0.03 -0.02
1442.62 1011.08 3 -0.60 +116.42
4 175 31 25 -13 175 31 12
-0.63 +116.44
1442.02 1127.50 4
94 47 21 156.25 +0.05 -0.03 -13.00 +155.67
1
193°44′00″
B
178°22′30″
43°17′12″ AB
B
180°13′36″
(5)推算各点坐标
A
XB=1230.88
YB= 673.45
附合导线坐标计算
附合导线坐标计算表
点 号
转折角 (右)
°′″
改正后 方向角 边 长
转折角
D
°′″ °′″ (m)
坐标增量
(m) X Y
改正后增量
1698.79 1027.58
1845.69 1039.98
4 16 00
D 1119 00 24 1119 01 12
738.33
-9 +614.90
附合导线测量内业计算步骤
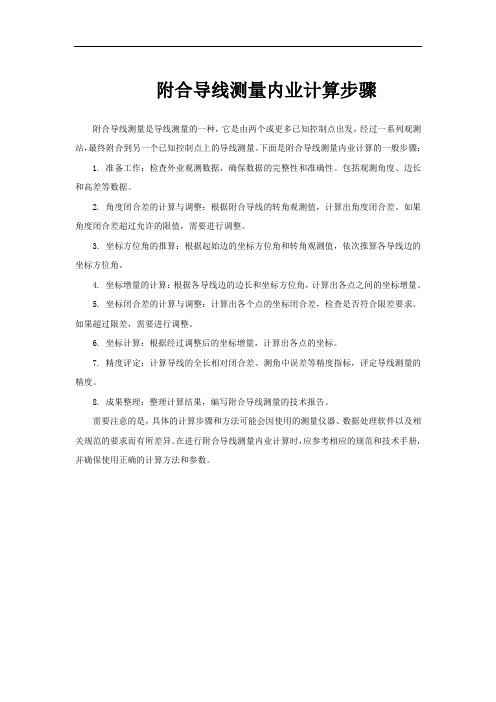
附合导线测量内业计算步骤
附合导线测量是导线测量的一种,它是由两个或更多已知控制点出发,经过一系列观测站,最终附合到另一个已知控制点上的导线测量。
下面是附合导线测量内业计算的一般步骤:
1. 准备工作:检查外业观测数据,确保数据的完整性和准确性。
包括观测角度、边长和高差等数据。
2. 角度闭合差的计算与调整:根据附合导线的转角观测值,计算出角度闭合差。
如果角度闭合差超过允许的限值,需要进行调整。
3. 坐标方位角的推算:根据起始边的坐标方位角和转角观测值,依次推算各导线边的坐标方位角。
4. 坐标增量的计算:根据各导线边的边长和坐标方位角,计算出各点之间的坐标增量。
5. 坐标闭合差的计算与调整:计算出各个点的坐标闭合差,检查是否符合限差要求。
如果超过限差,需要进行调整。
6. 坐标计算:根据经过调整后的坐标增量,计算出各点的坐标。
7. 精度评定:计算导线的全长相对闭合差、测角中误差等精度指标,评定导线测量的精度。
8. 成果整理:整理计算结果,编写附合导线测量的技术报告。
需要注意的是,具体的计算步骤和方法可能会因使用的测量仪器、数据处理软件以及相关规范的要求而有所差异。
在进行附合导线测量内业计算时,应参考相应的规范和技术手册,并确保使用正确的计算方法和参数。
附合导线计算方法
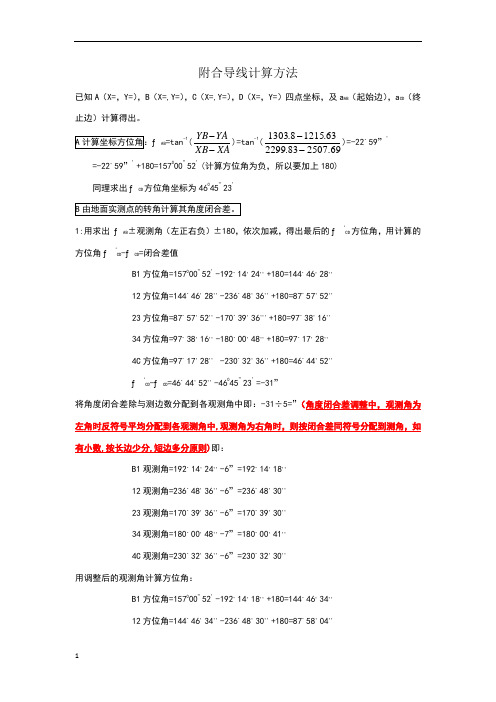
附合导线计算方法已知A (X=,Y=),B (X=,Y=),C (X=,Y=),D (X=,Y=)四点坐标,及a AB (起始边),a CD (终止边)计算得出。
ƒAB =tan -1(XA XB YA YB --)=tan -1(2507.6983.229963.12158.1303--)=-22。
59”’ =-22。
59”’+180=157000”52’(计算方位角为负,所以要加上180)同理求出ƒCD 方位角坐标为46045”23’1:用求出 ƒAB ±观测角(左正右负)±180,依次加减,得出最后的ƒ‘CD 方位角,用计算的方位角ƒ‘CD -ƒCD =闭合差值B1方位角=157000”52’-192。
14,24,,+180=144。
46,28,,12方位角=144。
46,28,,-236。
48,36,,+180=87。
57,52,,23方位角=87。
57,52,,-170。
39,36,,,+180=97。
38,16,, 34方位角=97。
38,16,,-180。
00,48,,+180=97。
17,28,,4C 方位角=97。
17,28,, -230。
32,36,,+180=46。
44,52,,ƒ‘CD -ƒCD =46。
44,52,,-46045”23’=-31” 将角度闭合差除与测边数分配到各观测角中即:-31÷5=”(角度闭合差调整中,观测角为左角时反符号平均分配到各观测角中,观测角为右角时,则按闭合差同符号分配到测角,如有小数,按长边少分,短边多分原则)即:B1观测角=192。
14,24,,-6”=192。
14,18,,12观测角=236。
48,36,,-6”=236。
48,30,,23观测角=170。
39,36,,-6”=170。
39,30,,34观测角=180。
00,48,,-7”=180。
00,41,,4C 观测角=230。
32,36,,-6”=230。
导线测量及计算..
右角
观测方法:单导线采用方向观测法观测左角或右角,支导线 观测左右角,导线网采用全圆方向观测法测角。 (二)、测边: 光电测距仪:目前是测距的主要方法,测距仪等级不同对不 同等级的导线测距的技术要求不同。测距仪的等级是按标 称精度划分。 mD=(a+b×D) mD—测距中误差: a-标称精度中的固定误差: b—标称精度中的比例误差系数: D—测距长度:
f
f x2 f y2
1 K S T f
考虑导线误差与边长有关,衡量导线精度用相对误差表示。
图根导线精度要求:
K
1 2000
3、坐标增量闭合差的调整:
调整原则:以相反符号按边长比例分配到各边长的坐标增量 中去。其坐标增量改正数为:
Vxi V yi fx Si S
S
导 线 测 量
要点: 1、导线的布设形式, 各种形式使用条件。 2、导线的外业工作 包括的内容及精度 要求。 3、导线测量计算
导线的布设形式及要求
一、导线的形式: (一)、闭合导线:如图,从一点开始 经过一系列的导线点,最后又回到原来 的起始点形成一多边形。 (二)、附和导线:如图, B βA 1 2 3 βp P B βA A 7 5 6 3 2 Q 4
∆xAB
α
AB
S
∆yAB
x AB xB x A d cos AB y AB y B y A d sin AB
xA o
A yA
yB
y
以上,根据已知点的坐标、已知边长和坐标方位角计算出 该边的坐标增量,并计算出另一点的坐标的方法称为坐 标正算。用普通计算机计算坐标增量的方法: 例:已知坐标方位角α 12=24°36′00“ 已知边长231.30m
闭合导线测量的内业计算

-2 -2
-97.04 -48.13
-2 -1
+23.80 -91.33
-1 -1
+63.94 -21.89
536.27 328.74 A
65v14x25i..1682 441950..2065fDx12Di v44y74i28..3546345401..69f24Dy 34Di 536.27 328.74 A
v B 2
+4
204 13 57204
14 01
i改
5 3
86
+4
36 29
86 36 33
1152.805 653.195
i B
DB1
D5B
4 91 0+8446 91 08 50
5
+4
153 16
35 153
16
39
+4
B 113 12 07113 12 11
1 719 59 36 720 00 00
-2
+74.77
-66.56
+74.79
xi,i1xi,i1vxi
-2 -2
-97.04 -48.13 -97.06 -48.11
-2 -1
+23.80 -91.33
陕西铁路工程职业技术学院公桥系
附合导线角度闭合差计算
α 12 2 B (1) β 2
3
α AB
β1
β3
A
(n) α cd
C
D
β n-1 βn
右角 fA B右 n18 C 0D
左角 fA B左 n18 C 0D
导线测量的内业计算
(2)角度闭合差的计算与调整
XC=1845.69 YC=1039.98 C C
(3)各边方向角的推算
1803248
8
(4)坐标增量闭合差的计算与调整 (5)推算各点坐标。
7
3
4 2045430
5
6
1811300
2
B
17821230 1934400
4317AB12
B 1801336
A
XB=1230.88编辑ppt
编辑ppt
(1)计算坐标增量闭合差:
fx x测 x理 x测
1
970300
fy y测 y理 y测 484318 A1 A 1122224
2
1051706
➢导线全长闭合差: XA=536.27m
YA=328.74m
1233006
4 1014624
f fx2 fy2
3
➢导线全长相对闭合差:
1617.01 980.86
8 +81.79 -2
+46.70 +2
+81.78
+46.72
1698.79 1027.58
C +146.92 +12.38 +146.90 +12.40 1845.691039.98
4 16 00
D
-9 +12
1119 00 24 1119 01 12
738.33
+614.90
YB= 673.45
表:附合导线坐标计算表
点 号
转折角 (右)
改正后 转折角
方位角
边长 D
坐标 增量(米)
改 正 后 坐标(米) 增量(米)
附合导线角度闭合差和方位角闭合差概念辨析
1 闭合差的概念
在测量学中 ,闭合差是很重要的一个概念 。一般规定 : ( 1) 闭合差 = 观测值 - 理论值 ( 2) 或 闭合差 = 推算值 - 已知值 可以看出 ,闭合差就是真误差 。对于三角形内角和而言 , 三 个内角观测值之和减去理论值 180° 就是三角形内角和的闭合差 ; 对于单一水准路线 ,由于它的测量高差与两端已知点的高差不相 等 ,其差值就是单一水准路线的闭合差 ; 对于闭合导线而言 ,由于 闭合导线形成平面闭合多边形这一几何条件 ,类似于三角形内角 和闭合差 ,所以根据公式 ( 1) 闭合导线的角度闭合差 fβ = β∑
3 角度闭合差与方位角闭合差的区分
以上问题在不同的测绘学著作中都持其中一种说法 ,出现的 矛盾如何解决 。尤其在编写计算机程序时应该将其统一起来 ,也 便于读者理清思路 , 不致出现混淆 。笔者认为 , 需要澄清其中两 个概念 ,按照公式 ( 1) 计算出来的闭合差应该定义为角度闭合差 ( fβ) ,即由于观测导线转折角产生的误差而导致转折角度不闭 合 ; 按照公式 ( 2) 计算出来的闭合差严格来讲定义为方位角闭合 差 ( fα) 比较合适 , 因为 fα = α ′ 终 - α 终 = 终边方位角推算值 - 终边 方位角已知值 ,即由于观测的转折角产生的误差而导致由起边推 算的终边方位角不闭合 。所以上面公式 ( 4 ) 和公式 ( 6 ) 中的 fβ 应 该写为 fα。即 :
・3 4 6 ・
第 35 卷 第 26 期 Vol. 35 No . 26 山 西 建 筑 2 0 0 9 年 9 月 Sep . 2009 SHANXI ARCHITECTURE
文章编号 :100926825 (2009) 2620346202
闭合导线计算公式[整理版]
![闭合导线计算公式[整理版]](https://img.taocdn.com/s3/m/e4bc7cc577eeaeaad1f34693daef5ef7ba0d1206.png)
闭合导线:
名称表示原理
(导线长) D 实测边长总合
(角度总和)∑β 实测左角相加的总和
(角度闭合差)Fβ 实测左角相加的总和的秒位数
(坐标闭和差)Fx △x计算出的坐标增量之合
Fy △y计算出的坐标增量之合
(距离闭合差) F Fx平方加Fy平方开根号
(导线精度)K F/D(1÷F×D)
附合导线:
名称表示原理
(导线长) D 实测边长总合
(角度总和)∑β 实测左角相加的总和
(角度闭合差)Fβ 实测推算出的终点方位角减理论的终点方位角(坐标闭和差)Fx △x总合减(终点x坐标减起始x坐标)
Fy △y总合减(终点y坐标减起始y坐标)
(距离闭合差) F Fx平方+Fy平方开根号
(导线精度)K F/D(1÷F×D)
坐标增量计算:
△x12=D12×cosa12
△y12=D12×sina12
D :实测两点间的距离。
a :实测两点间的方位角。
近似平差方法:①将角度闭合差除以测站数:Fβ÷N(N表示测站数)=∩(角度均值),然后将角度均值加到实测右角中。
②将Fx平方加Fy平方开根号,得出距离闭合差,用距离闭合差除以观测边长数得出距离均值,然后将距离均值加到每一条实测边长中。
③从起测点开始,再通过公式△x12=D12×cosa12 、△y12=D12×sina12求出坐标增量。
用上一测站的坐标加上坐标增量就得出平差后的坐标。