飞思卡尔智能车入门资料大全
《智能车制作 “飞思卡尔杯”从入门到精通》教材部分章节节选
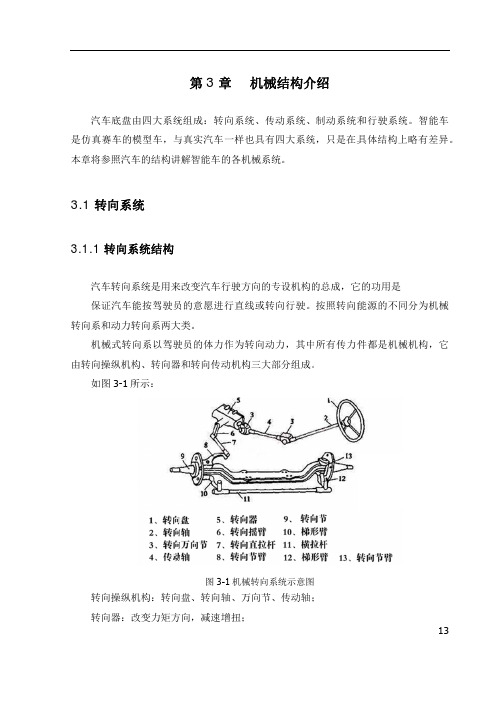
是仿本章3.13.1转向由转 汽车底盘由仿真赛车的模章将参照汽车1 转向系统.1 转向系汽车转向系保证汽车能向系和动力转机械式转向转向操纵机构如图3-1所转向操纵机转向器:改由四大系统模型车,与车的结构讲统系统结构系统是用来能按驾驶员转向系两大向系以驾驶构、转向器所示:机构:转向改变力矩方第3章统组成:转与真实汽车讲解智能车的来改变汽车行员的意愿进大类。
驶员的体力器和转向传动图3-向盘、转向轴方向,减速增机械向系统、传一样也具有的各机械系行驶方向的行直线或转作为转向动动机构三大-1机械转向轴、万向节增扭;械结构介传动系统、有四大系统系统。
的专设机构的转向行驶。
动力,其中大部分组成。
系统示意图节、传动轴;介绍制动系统和统,只是在具的总成,它按照转向能中所有传力件。
和行驶系统具体结构上它的功用是能源的不同件都是机械13统。
智能车上略有差异同分为机械械机构,它3车异。
械它—纵节。
因前转向结构向节克曼使曲向系转向传动机传力途径:纵拉杆—转向智能车转向前悬架不同分向系统是参考图3-2所构示意图,它节臂。
图3现代车辆的AC 和BD 曼几何。
当以曲柄BD 亦向同理AC 向为了避免在系统能保证在机构:转向:转动转向向节臂—左向系统为机分为非独立考汽车独立所示为汽车独它们的结构-2 独立悬挂的转向原理为两等长不以A 点为瞬向右转动β向左转角α在汽车转向在汽车转向向摇臂、转向向盘—通过左转向节绕机械转向系立式转向系立式悬架转向独立式悬架构是基本相挂转向系统示理是四杆机构不平行的曲瞬时中心时1角。
此时2时,经由图3向时产生路向时所有车向直拉杆、万向节输入主销偏转—,结构上与统和独立式向系统设计架转向系统的同的。
智能示意图 构中的双曲柄,即AB ,中心将曲,α1>β1;连杆CD 使3-4四连杆双面对汽车行轮均作纯滚转向节臂、入转向器——左梯形臂与汽车的转式转向系统计的。
的结构示意能车转向系曲柄机构,如B 和CD 两平曲柄AC 向使曲柄BD 亦双曲柄机构行驶的附加滚动。
飞思卡尔智能车新手入门解决方案

目录目录 (1前言 (3一、基于飞思卡尔芯片的智能循迹车 (11、智能循迹车简介 (12、摄像头组方案 (1(1CMOS模拟摄像头 (2(2CMOS数字摄像头 (33、光电组方案 (4(1红外传感器 (4(2激光传感器 (64、电磁组方案 (10(1工型电感传感器 (10(2色环电感传感器 (10(3硬件设计 (105、道路识别策略 (11(1摄像头信号采集 (12(2红外传感器信号采集 (13(3电磁传感器信号采集 (136、电机驱动 (147、速度检测 (168、调试策略 (17(1速度调试(以摄像头组为例子 (17(2综合调试 (18二、入门级别智能车方案——基于STC89C52单片机智能小车 (191、简介 (192、方案 (19(1基于红外传感器循迹方案 (19(2基于激光传感器循迹方案 (203、利用中断调制PWM占空比驱动直流电机 (23 (1直流电机的实物图片 (23(2直流电机的介绍 (23(3直流电机的驱动 (234、利于中断调制PWM占空比驱动舵机摇头 (24 1、舵机的原理及其应用 (24(1舵机的实物图片: (24(2舵机的介绍 (25(3舵机的工作原理 (255、数码管显示 (251、数码管原理 (256、LED流水灯控制 (27LED灯参考电路图 (277、液晶显示 (28(11602液晶显示 (28a主要技术参数 (28b信号接脚 (29c基本操作时序 (29d电路图接法 (29(212864液晶显示 (30a主要技术参数 (30b信号接脚 (30c基本操作时序 (30d电路图接法 (318、ADC0804 (319、DAC0832 (3210、I2C总线 (3411、矩阵控制 (3512、蜂鸣器控制 (36前言智能化是21世纪机电一体化技术发展的一个重要发展方向。
人工智能在机电一体化及自动控制领域日益得到重视,现阶段在机电一体化及自动化专业教学方式上,部分院校较重视实践而轻理论,部分院校较重视理论而轻实践,但有一个共同点就是:通过一些相关技能竞赛能够有效地提高学生的综合能力,在比赛过程中充分锻炼了参赛者理论知识和实操能力;如:飞思卡尔智能汽车竞赛,电子设计竞赛,机械创新设计竞赛,瑞萨竞赛等。
培训资料 北航飞思卡尔培训ppt

电路、电源电路、电磁传感器、以及一些其他的可能模块),
可以使用指定的现成模块(线性CCD,摄像头,按键(最好 自己画)、OLED显示屏、超声波传感器)等。(以规则为主)
几点建议(续)
• 5、建议的芯片:一般K60比较多,如果用的话,大家可
以用K60DN512的芯片,最小系统板建议用一样的,因 为会有很大可能烧芯片,到时候方便更换。
PE和IAR配合使用
• 教程:/module/forum/thread-缺点:有BUG,PE是英文,配置元件和模块的时候上手可能比较难 • 已知bug1:在已有的工程上,PE新生成的一些component可能无法 自动更新到IAR工程上 • 解决办法:重新connect info文件 • 已知bug2:当开着IAR时(IAR打开了指定的工程),在PE已有的工 程基础上,新生成component或者更改component的配置的时候, 会出现IAR无法编译链接时候的出错 • 解决办法:关掉IAR工程,PE重新生成代码,打开IAR(必要的时候可 能要重复bug1的解决办法)
• 6、9s12芯片也是建议的,kl26芯片也是可以的,我们
还用过kl46,kl系列资料较少,相对而kl26资料多一点。
• 7、电池的接口最好要统一,不统一也可以做转接头,这 样队伍之间可以通用,千万注意正负极 • 8、希望组与组之间进行讨论交流,不同项目的队伍之间 也可以交流。
几点建议(续)
• 9、选用管脚的时候,注意管脚冲突的问题。下载器的调
• SI下降沿 开始输入采集到的电压值
线性CCD TSL1401
• 一般模块基本是5根引脚,也有6根引脚的出现
GND GND VCC SI AO CLK VCC AO AO2 SI CLK
飞思卡尔光电组
传感器硬件原理图
传感器元器件清单
? 发光二极管 × 8
发光二极管(贴片封装0805) × 8
? 接收管 × 8
调制管 × 4
? 三极管8050 × 4
电位器500Ω(滑动变阻器) × 8
? 电容0.1μF(贴片封装0603) × 8
? 电阻22Ω(贴片封装0805) × 16
? 电阻1.5kΩ(贴片封装0805) × 8
00110000000000
黑线相当偏左 01000000000000
没有黑线(盲区) 00000000000000
传感器在起点与十字路口
? 如何分辨是 后期重点
2、路径识别算法
? 传感器相关初始化
? void PORT_Init(void)
?{
? DDRA = 0x00;
//端口A方向输入
? PUCR_PUPAE = 1; //端口A信号上拉
按传感器输出信号不同,检测方法 分两种:数字量输出(调制,以我们学 校为代表)和模拟量输出(A/D,以清 华为代表)。
二、光电车硬件
元器件标号基本知识: R电阻标号识别
C电容标号识别
←无k是标号
有k就是阻值 →
光电传感器:发射电路
调制是为了将连续光变成频率约180kHz的光脉冲
注意:⒈我们使用的接收管只能接收调制光,因此发射管必须经过调制电 路发射调制光,否则接收管无法接收光信号;
? PORTA = 0x00; //端口A初值为0
}
寄存器按位赋值举例PUCR_PUPAE = 1; (PUCR |= 0x01;)
? 传感器状态采集:
? void Sensor_collect(void) //采集传感器状态
飞思卡尔智能车开发教程Chap08资料

SPI串行时钟引脚SPSCK用于控制主机与从机之间的数据传输。
❖ 6.主出主入引脚MOMI
主出主入引脚MOMI(Master Out/Master In)是单线传输时,主机的输入输出数据 线,与MOSI引脚复用。对于MCU被设置为主机方式,该引脚发送或接收从机的数据。
0x0000
2020/10/13
8
8.3 A/D模块编程方法与实例
8.3.1 A/D模块基本编程方法
❖ 1.A/D转换初始化
在程序初始化时应对A/D转换的5个控制寄存器写入控制字 节,决定序列长度,设置分频系数和转换精度等。
❖ 2.启动A/D转换
对于A/D转换状态向控制寄存器写入控制字节,选取要转 换的通道、结果寄存器的调整方式、设置是连续转换还是一 次转换。 ❖ 3.获得A/D转换结果
❖ 7.从入从出引脚SISO
从入从出引脚SISO(Slave In/Slave Out)是单线传输时,从机的输出输入数据线, 与MISO引脚复用。对于MCU被设置为从机方式,该引脚发送或接收主机的数据。
❖ 8.时钟极性
表示时钟信号在空闲时是高电平还是低电平。
❖ 9.时钟相位
决定数据是在时钟信号SCK的上升沿还是在SCK的下降沿进行采样
❖ 1.主机-从机(Master-Slave)
提供SPI串行时钟的SPI设备称为SPI主机或主设备(Master),其它设备则称为SPI从 机或从设备(Slave)。
❖ 2.从机选择引脚 (Slave Select)
若一个MCU的SPI工作于主机方式,则置该MCU的 为高电平。若一个MCU的SPI工作 于从机方式,当 =0时表示主机选中了该从机,反之则未选中该从机。
飞思卡尔智能车
飞思卡尔智能车控制系统硬件设计硬件部分:电机舵机传感器车模电机:主要作用是产生驱动转矩,作为小车的动力源。
舵机:能够转舵并保持舵位的装置,也就是让小车拐弯的装置。
传感器:能感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置,在智能车中,最重要的传感器就是摄像头。
车模:智能车车架,包括底板、齿轮、车轮、电池等等。
主要内容:•MCU最小系统设计•电机及舵机驱动电路设计•光电检测电路原理与设计•图像检测原理与设计1.控制系统的构成一般控制系统由传感器、控制器和执行器组成。
智能车中主要体现:光电器件或器件构成的寻线传感器。
用于操纵小车行走和转向的执行器。
根据传感器信息控制执行器动作的控制器。
三者之间的关系可用如下的关系图描述:飞思卡尔杯规定了比赛用车模、控制器所使用的MCU、执行器、传感器的数量等,比赛中硬件设计所涉及的主要工作是:•设计可靠的MCU控制电路;•执行器驱动电路;•传感器电路;(进行硬件设计的工具很多,建议使用Protel99SE,该软件易上手、效率高,可满足一般电路设计要求。
)MC9S12DG128 的封装2 .MCU最小系统设计MCU最小系统设计分为供电系统设计、复位系统设计、时钟电路设计、BDM调试接口设计、串口通讯设计。
2.1 MCU供电系统设计MCU正常工作需要合理供电,为获取良好的抗干扰能力,电源设计很重要。
针对此次比赛使用的电池和MCU,在供电系统设计中要充分考虑以下因素的影响:1.系统供电电源为7.2V镍氢电池组,不能直接为MCU及其它TTL电路供电。
2.为保证较高的行驶速度,驱动电机需使用电池组直接驱动,故电源电压波动较大。
3.转向用舵机工作电压为5V,其启动电流较大,如与MCU共用5V电源,会引入较大的干扰。
4.采用三端稳压器7805存在效率低、抗干扰能力差的缺点。
采用三端稳压器的电源设计:升降压开关稳压电路•MCU供电飞思卡尔S12系列单片机采用了若干组电源,必须很好的对这些供电电源进行良好的滤波,才能设计出抗干扰能力强的控制器。
飞思卡尔智能车入门资料大全概要
1.2.2 动手能力和创新能力 常见电源电路和驱动电路设计 新的一些寻迹算法的提出等
二、硬件系统设计与实现
1)电源部分 2)电机驱动部分 3)舵机部分 4)图像采集部分 5)测速部分
1k
OUT1 CC P1 OUT2 33n VS S VS S D1 D2 47uF 47u VS S C3 0.1u GND GND C1 GND
GND 6 5 4 3 2 1 GND VC C PWM7 PWM5 D2 D1
20 DNC 4 V+ 5 V+ 16 V+ 18 D1 13 D2
R2 VC C
正确放电:
由于镍镉电池具有记忆效应,对电池的不完全放电将会人 为的降低电池的电容量; 从放电曲线可以看出,随着电池电量的减少,其电压也会 逐渐降低,当电压降低到某个阈值后继续放电,电池电压 将很快的跌落。这个阈值就是电池的放电下限电压。厂家 给出了放电下限电压为6V。因此,在使用时,建议在动力 车的电源设计中加入电池保护电路,当电池电压低于6V时 切断电路,用来保护电池。如果没有保护电路,要注意, 电池接通时人不要离开。因为当电池电压降到接近6V时, 电池已经给不出多少电流,已经没有能力驱动电机了,此 时一定要及时断开电路,到了给电池充电的时候了。
舵机控制方法
三线连接方式 红线:电源线+6V 蓝线:地线 黑线:PWM控制信号
2.2.2驱动芯片BTS7960/7970组成的电路
大功率驱动芯片BTS7970特性如下: 输入电压:6v---24v 输出电流: 最大可达60A 内阻:16毫欧 控制线电压: 5v PWM控制频率:25K
智能车飞思卡尔
第一章1、工厂供电对工业生产有何重要作用?对工厂供电工作有哪些基本要求?重要作用:现代社会是建立在电能应用的基础之上的,电能在产品成本中所占的比重一般很小(除电化等工业外),其重要性是在于工业生产实现电气化以后可以增加产量、提高产品质量和劳动生产率,降低生产成本,减轻工人的劳动强度。
如果工厂供电突然中断,则对工业生产可能造成严重的后果。
例如某些对供电可靠性要求很高的工厂,即使是极短时间的停电,也会引起重大设备损坏,或引起大量产品报废,甚至可能发生重大的人身事故,给国家和人民带来经济上甚至政治上的重大损失。
基本要求:1、安全:在电能的供应、分配和使用中,不应发生人身事故和设备事故。
2、可靠:应满足电能用户对供电可靠性即连续供电的要求。
3、优质:应满足电能用户对电压和频率等质量的要求。
4、经济:供电系统的投资少,运行费用低,并尽可能地减少有色金属消耗量。
2、工厂供电系统包括哪些范围?变电所和配电所的任务有什么不同?什么情况下可采用高压深入负荷中心的直配方式?工厂供电系统是指从电源线路进厂起到高低压用电设备进线端止的电路系统,包括工厂内的变配电所和所有的高低压供电线路。
配电所的任务是接受电能和分配电能,不改变电压;而变电所的任务是接受电能、变换电压和分配电能。
高压深入负荷中心的直配方式,可以省去一级中间变压,简化了供电系统接线,节约投资和有色金属,降低了电能损耗和电压损耗,提高了供电质量。
然而这要根据厂区的环境条件是否满足35kV架空线路深入负荷中心的“安全走廊”要求而定,否则不宜采用。
3、什么叫电力系统、电力网和动力系统?建立大型电力系统有哪些好处?电力系统:由各级电压的电力线路将一些发电厂、变电所和电力用户联系起来的一个发电、输电、变电、配电和用电的整体,称为电力系统。
电网:电力系统中各级电压的电力线路及其联系的变电所,称为电力网或电网。
动力系统:电力系统加上发电厂的动力部分及其热能系统和热能用户,就称为动力系统。
飞思卡尔智能车培训
XS128单片机(80脚)最小系统原理图
最小系统各部分介绍
1、时钟电路 时钟电路对单片机的运行至关重要, 时钟电路对单片机的运行至关重要,电路 简单,但作用不小,元件参数选择、 简单,但作用不小,元件参数选择、印刷 板的布线都要注意。通过一个16MKZ的外 板的布线都要注意。通过一个 的外 部晶振借到单片机的外部晶振输入接口 EXTAL和XTAL上,利用 和 上 利用MC9S12XS128内 内 部的压控振荡器和锁相环把这个频率提高, 部的压控振荡器和锁相环把这个频率提高, 作为系统内部总线时钟。 作为系统内部总线时钟。
S12单片机开发平台入门
• 1、CodeWarrior集成开发环境介绍 • 2、BDM简介 • 3、MC9S12单片机最小系统
一、 CodeWarrior集成开发环境介绍
1.CodeWarrior能做些什么? A)使用C/C++进行编程 B)支持Java开发 智能车仅限于应用C/C++语言在Windows平台上使用CodeWarrior进行 开发 2. CodeWarrior的优点是什么? CodeWarrior能够自动地检查代码中的明显错误,它通过一个集成的调 试器和编辑器来扫描代码,已找到并减少明显的错误,然后编译并链接 程序以便计算机能够理解并执行程序。
3、接下来会跳出一个窗口让用户选择串口号和波特率,波特率最好为19200
4、点OK后会有一个程序下载到目标板的 过程:
5、之后会出现之前的调试界面。
二、BDM的介绍
• BDM是用来向单片机下载程序用的,可以 将单片机的Flash中旧的程序擦除。另外具 有调试功能,s12单片机的BDM接口可以提 供很多调试信息,包括CPU运行时的动态 信息,故与之通信的BDM也需要CPU支持。 • 单片机只需要一个6针的插头将信号引出和 BDM调试器连接,就可以实现单片机的DM 调试。
飞思卡尔智能车培训之硬件篇概要

电机驱动
电机驱动
电机驱动——NMOS方案
电机驱动——BTN7971半桥
实物图
Байду номын сангаас
内部原理
电机驱动——BTN7971方案
电机驱动——驱动隔离
为什么要隔离?
电机是电感性器件,电流不容易轻易改变,当电机反转或者频 繁地启动停止时会产生反向电动势,这个反向电动势很大,一般有 电源电压的几倍甚至几十倍,如果对这个电压经过隔离,一旦反串 到单片机就会直接烧坏单片机。
电机驱动——驱动隔离
缓冲器74LS244
相当于一个缓冲池, 可以一定程度上隔离反 向电动势。
电机测速
通过检测脉冲数计算转速
将测得的转速 与设定值比较 调整,得到想 要的转速值。
电池
参数:
•电压:1.2×6=7.2 v •容量:2000mAh
放电曲线(在3A的大电流放电条件下得到的结果)
电源管理——电池使用注意事项
怎么隔离?
1、光耦隔离
2、用缓冲器74LS244隔离
电机驱动——驱动隔离
光耦隔离原理:
光耦隔离就是采用光耦合器进行隔离,光耦合器的结构相当于把发 光二极管和光敏(三极)管封装在一起。发光二极管把输入的电信号转换 为光信号传给光敏管转换为电信号输出,由于没有直接的电气连接,这 样既耦合传输了信号,又有隔离作用。
用个显示屏显示数据,建议:OLED12864
留几个按键用于调整参数和启动
用单片机AD口读取电位器电压值,方便参
数的调整 留出多余的接口
布线建议:
注意电源部分电源线和地线要加粗,不小
于40mil。 电机驱动模块信号和电源地分开,可以顶 层走信号线,底层走电源线,电源线和地 线同样要加粗,由于电机电流大,至少 100mil。 其他布线要尽量短,避免干扰。
飞思卡尔智能车从零开始

一开始我们买了TRT5000这种光电管,我测试过这种光电管的敏感距离很近,有才1~2cm,而且只能直射。所以我们考虑把它用在检测起跑和十字路口。看了华南理工光电报告,他们用的是架起来的光电管,很想学他们,所以我和队友刘久研究他们用哪种信号的,刚开始久定位错了,因为看到报告说他们用的是840nm的发射管,接收管套上黑皮套,久以为是遥控用的发射和接收管哪种类似,久淘宝买原件弄,久这样找资料,焊电路,调试,最后发现光电接收管有两种电平型和脉冲型,一般的遥控用的三只脚的接收一体化的光电管是脉冲型的,在刚碰到黑线,电平会改变ms级的时间,接着就不变了,而且发现它的接收管出奇的灵敏。弄了好像也差不多一个个月吧,才确定我们弄错了,我的博客有篇文章是介绍红外的,可以参考下
9XS128和DG128不同的不多,但AD的寄存器是完全不同,9X128多了个PIT24位的定时,芯片注明总线频率不要超过40MHZ但我们这边摄像头一直超到80MHZ和64MHZ,到现在都没事。
2。回到学校才2月20多号,大家都回到学校,我在寒假也看了下PID算法,回来大家交流下都烦糊涂(其实PID最好不要看的那么认真,等车能跑了,再认真研究算法也不迟的),大家继续看资料,算法也好,逛论坛也好……声明下,当时热情高涨的很啊。是盼着车模和主板芯片快点到啊。可能是学校第一次参加这个比赛,经费迟迟不批,系列负责老师说跟校领导催了,我们也看得见,但就是不批钱,结果等到3月中旬了,基本其他学校都在月初拿到芯片和车模了,我们到中旬了连个屁也摸不着,一直等,没实践,把热情都磨没了……到3月月底就觉得没戏了,也没心情看资料,其实到中旬以后就没什么希望和热情了(1因为把智能车想得太高深~2。车模迟迟不到,以为学校不批了)
对于赛道;刚开始官方网说只能用KT板(看优酷帖的赛道有检测用的黑线)~以为白色KT板和黑线是什么高级的东东,用800多买回来才知道TMD这些东西值个鸟钱,其实检测的用黑线久就是黑色电工胶~五金店几块钱多的是~但主要要买2.54cm的。对于KT板,就是我们吃饭用的白色饭盒的材料吧!没认真研究过,不过材料感觉差不多,TMD太赚我们的钱了。车模没到前,可以买些电工胶在宿舍的走道帖,先做个探测头,探测头网上买容易也不贵,模拟检测嘛!车做好后,我试过在宿舍的地板能跑。
zifeng教你学做智能车挑战飞思卡尔之4计算机辅助设

户获得更大的成功。
4.1.2 AutoCAD 简介
(9)AutoCAD使信息的连接变得简单易行,使设计团队 在设计制造流程中可以开展协作化的产品开发,能够与企 业内的任何员工或扩展的团队安全共享设计数据,其功能 有:能为有需要的用户共享、查看、标记和管理2D, 3D 设计数据,支持与其他用户的文件交换,并能在更改变得 困难之前,减少设计流程中的错误,生成新的观点,从而 使业务流程能够实现从创建到完成的平稳运作。
❖ (5)库(Library)
❖ 库是支持EDA工具完成各种自动设计过程的关键。EDA设 计公司与半导体生产厂商紧密合作,共同开发了各种库, 如逻辑模拟时的模拟库、逻辑综合时的综合库、版图综合 时的版图库、测试综合时的测试库等。在这些库的支持下, EDA工具能够完成各种自动设计。
4.2.2 Protel
4.2.1 EDA技术
❖ (3)逻辑综合与优化
❖ 逻辑综合功能将高层次的系统行为设计自动翻译为门级逻辑 的电路描述,做到了设计与工艺的独立。优化则是对于上述综 合生成的电路网表,根据布尔方程功能等效的原则,用更小、 更快的综合结果替代一些复杂的逻辑电路单元,根据指定的目 标库映射成新的网表。
❖ (4)开放性和标准化
4.1.1 机械设计原理
(4)社会性要求 机械产品的操作应方便、安全;外观造 型和色彩应大方宜人;具有较强的市场竞争力;遵循国家 及相关部门环境保护等有关法规。
(5)其他特殊要求 不同的机械还具有一些该机械所特有 的要求。例如,对机床有长期保持精度的要求;对飞机有 质量轻、飞行阻力小而运载能力大的要求等。
第3章飞思卡尔智能车--3

1 u (t ) = K p e(t ) + Ti
武汉科技大学信息科学与工程学院
∫
de(t ) e(t )dt + Td 0 dt
t
(3.5)
3.2.1 PID控制算法 PID控制算法
式中,称为微分时间。理想的PID控制器对偏差阶跃变化的响 式中,称为微分时间。理想的PID控制器对偏差阶跃变化的响 PID 应如图3.4所示, 应如图3.4所示,它在偏差变化的瞬间处有一个冲激式的瞬 3.4所示 态响应,这就是由微分环节引起的。 态响应,这就是由微分环节引起的。
智能汽车设计基础— 第3章 智能汽车设计基础—软件
第3章
智能汽车设计基础—软件 智能汽车设计基础—
在智能车系统的设计中,硬件是基础, 在智能车系统的设计中,硬件是基础,没有一个好的硬 件平台,软件就无法运行。对于智能车系统来说, 件平台,软件就无法运行。对于智能车系统来说,软件的核心 是控制算法。而完成这些任务的编程语言有汇编语言和C语言。 是控制算法。而完成这些任务的编程语言有汇编语言和C语言。 软件部分是整个智能车系统的灵魂,在硬件方面各参赛队之间 软件部分是整个智能车系统的灵魂, 大同小异, 大同小异,真正体现各参赛队智能车的优势和最后决定比赛成 绩好坏的往往是软件部分,尤其是核心控制算法的设计。 绩好坏的往往是软件部分,尤其是核心控制算法的设计。本章 首先简要介绍软件编程中使用的汇编语言和C语言各自的特点, 首先简要介绍软件编程中使用的汇编语言和C语言各自的特点, 然后重点介绍核心控制算法的原理。 然后重点介绍核心控制算法的原理。
武汉科技大学信息科学与工程学院
3.2.1 PID控制算法 PID控制算法
(3)比例积分微分控制器 积分调节作用的加入,虽然可以消除静差, 积分调节作用的加入,虽然可以消除静差,但其代价是 降低系统的响应速度。为了加快控制过程, 降低系统的响应速度。为了加快控制过程,有必要在偏差出 现或变化的瞬间,不但要对偏差量做出反应( 现或变化的瞬间,不但要对偏差量做出反应(即比例控制作 ),而且要对偏差量的变化做出反应 而且要对偏差量的变化做出反应, 用),而且要对偏差量的变化做出反应,或者说按偏差变化 的趋势进行控制,使偏差在萌芽状态被抑制。 的趋势进行控制,使偏差在萌芽状态被抑制。为了达到这一 控制目的,可以在PI控制器的基础上加入微分控制作用, PI控制器的基础上加入微分控制作用 控制目的,可以在PI控制器的基础上加入微分控制作用,即 构造比例积分微分控制器(PID控制器)。PID 控制器)。PID控制器的控 构造比例积分微分控制器(PID控制器)。PID控制器的控 制规律为