基于单片机的电动自行车控制器设计
基于单片机的电动车控制器
基于单片机的电动车控制器一.设计要求1.显示:实时显示电瓶的电量;车速2.线性调速功能:要求采用传统的手把调速方式(通过线性霍尔传感器),此处对霍尔器件的电压处理要求利用压频转换来代替A/D转换。
3.具备完善的保护功能:如过载保护、欠压保护、短路保护和防飞车等功能。
电动车控制器是用来控制电动车电机的启动、运行、进退、速度、停止以及电动车的其它电子器件的核心控制器件,它就象是电动车的大脑,是电动车上重要的部件。
微型计算机的出现给人类生活带来了根本性的变化,使现代科学研究发生了质的飞跃,单片机技术的出现给现代生活带来了一次新的技术革命。
本设计主要是设计一个由单片机控制的电动车控制器系统,操作者可通过系统的按钮控制电动车的旋转速度电量和里程。
同时为了可以直观的看出电动车的运行状态,其旋转速度和当前电量可以在数码管上显示出来。
2 总体设计方案2.1 设计思路根据电动车的工作原理可以知道,电动车控制器是通过霍尔速度转把采集信号,然后通过数模转换将信号传给单片机,利用单片机控制输出用改变功率管控制信号PWM的方法来控制电动车的转速,用霍尔元件A44E安装在车轮上,车轮每转一圈霍尔器件就会给单片机一个脉冲,单片机根据这个脉冲的频率来计算车速,另外为了保护电池当电池电压下降到一定程度的时候要有警示电路(用普通发光二极管警示)。
并且要设计配套的刹车保护、欠压保护、过流保护等保护电路。
2.1.2 电动车电机的选用目前电动车电机普遍采用永磁直流电机。
所谓永磁电机,是指电机线圈采用永磁体激磁,不采用线圈激磁的方式。
这样就省去了激磁线圈工作时消耗的电能,提高了电机机电转换效率,这对使用车载有限能源的电动车来讲,可以降低行驶电流,延长续行里程。
本设计也选用此永磁直流电机。
2.1.3设计框图如下图1。
图1总设计框图3 设计原理分析3.1、硬件设计本设计的硬件电路主要包括最小系统、时速控制电路、显示电路、驱动电路四大部分组成。
基于单片机的电动自行车控制系统

2009届本科毕业论文基于单片机的电动自行车控制系统姓名:系别:专业:学号:指导教师:2009年1月5日目录摘要 (II)0 引言 (1)1系统要求 (1)2总体规划及电路设计 (1)3 主要器件性能及原理 (2)3.1SPMC65P2404A单片机内部结构 (2)3.2永磁无刷直流电动机及三端式稳压器 (3)3.3系统主流程设计 (4)4结语 (6)参考文献 (6)致谢 (6)基于单片机的电动自行车控制系统摘要单片机控制的永磁无刷直流电动机调速系统适用于电动自行车等小功率的工作情况。
并能将多余的电能回溃。
该系统具有调速性能好、功率因数高、节能、体积小、重量轻等优点。
本文设计了系统的各种工况及信号的传递情况,并得到了系统各个部分在不同工况的工作状态。
系统各部分的控制电路基于凌阳公司的控制芯片SPMC65P2404A单片机。
根据永磁无刷直流电动机的特性实施脉宽PWM控制,并通过转速传感器测量转速通过八段数码管动态显示转速,通过软硬件的配合,实现了整个系统的设计要求。
关键词单片机、永磁无刷直流电动机、转速传感器Based on single-chip control system for electric bikesAbstractSinglechip-controlled permanent magnet brushless DC motor speed control system is suitable for electric bicycles and other low-power work. And can collapse redundant power back. The system has good speed, high power factor, energy saving, small size, light weight and so on.This article discussed in detail the system operating conditions and signal transmission, and get the various parts of the system in different conditions of work. System part of the control circuit to control based on Lingyang's SPMC65P2404A chip. Permanent magnet brushless DC motor in accordance with the characteristics of the implementation of PWM pulse width control and speed through the speed sensor measurement through eight digital tube dynamic display speed, through hardware and software support, the realization of the entire system design requirements.KeywordsSingle-chip, permanent magnet brushless DC motor, speed sensor0 引言人类与环境共存和全球经济的可持续发展使人们迫切希望寻求到一种既能代替人力又低排放和有效利用资源的交通工具,电动车是一种安全、经济、清洁的绿色交通工具,不仅在能源、环境方面有其独特的优越性和竞争力,因此使用电动车无疑是一种很有希望的方案。
基于单片机的电动车控制系统设计

图 3 无刷直流电动机控制系统功率主电路
控制器电路由微控制核心 PIC16F72 单片机、逻辑保 护门 74LS00 和 +5V 电源电路构成,附加电路包括电源滤 波电路、位置传感器信号采集电路、电池电压降压监测电 路、微控制器时钟振荡电路和上电复位电路构成;同时电 路向外提供各种输入和输出接口:助力传感器接口 fSen-
社,2006. [4]高湘.给水工程技术及工程实例 北京:化学工业
出版社,2002. [5]谌永红.给水排水工程 北京:中国环境科学出版
社,2008. (收稿日期:2008-08-27)
的调速设备价格较为昂贵,一次性投资较大,因此当管网
《湖北农机化》2008 年第 5 期 25
开发与研究
号的状态与电机的固定序列进行比较,以判断换相的正确 性;MOSFET 驱动电路由 IR2103 把上管和下管控制信号 进行放大,驱动大功率管。
年可节省电费成本支出约 94 万元。保守一点算,一年也
可节省电费成本支出约 45.3 万元。
参考文献
3 结论
[1]关醒凡.现代泵技术手册[M] .北京:航宇出版社,
怀化市一水厂送水泵站中改造费用主要是更换 5 台 水泵,即 4 台 24SAP-14B 型泵和 1 台 350S44A 型泵。购 买 5 台泵所需费用约为 35 ̄40 万元,也就是说,改造一年 时间内节省的电费成本即基本可收回投入的改造费用。因 此,正确合理选择送水泵站的水泵和供水方式,采取最大 限度的节能措施,可以大幅度地降低电力消耗,最直接的 节约生产成本。
sor、速度传感器接口 SP、速度限定接口 SE,a 相位传感 器输入接口 aSensor,b 相位传感器输入接口 bSensor,c 相 位传感器输入接口 cSensor、一个模式开关接口 KMOD、 刹车开关接口 kBRK、面板接口 Panel。本系统还设置了过 压、欠压、过流、过热等保护环节,并根据简单可靠原则 设计了系统具体的保护电路。
基于单片机的电动车控制系统设计毕业设计;

毕业设计题目:基于单片机的电动车控制系统设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于单片机的电动车速度控制系统

基于单片机的电动车速度控制系统2023-11-11•引言•单片机与电动车速度控制概述•基于单片机的电动车速度控制系统设计•实验与分析•结论与展望•参考文献01引言研究背景与意义研究内容研究方法研究内容与方法02单片机与电动车速度控制概述单片机基本原理030201电动车速度控制原理电动车的速度控制是通过调节电动机的转速来实现的,主要通过改变电动机的输入电压或电流来实现。
电动车速度控制策略根据实际需要,可以采用PID控制、模糊控制、神经网络等控制策略来调节电动机的转速。
电动车速度控制方法单片机在电动车速度控制中的应用单片机作为控制器单片机可作为电动车速度控制器的核心部件,根据电动车的速度和行驶状态,通过编程实现各种控制算法,从而实现对电动车速度的精确控制。
单片机采集传感器数据单片机还可以采集电动车的速度、行驶里程、电池电量等传感器数据,并通过算法进行数据处理和分析,以实现对电动车的优化控制。
03基于单片机的电动车速度控制系统设计系统硬件设计当速度超过设定值时,发出声音和灯光报警。
根据单片机的控制信号,驱动电机转动,实现速度调节。
采用光电编码器或霍尔传感器等速度检测元件,实时检测电动车的速度。
为整个系统提供稳定、可靠的电源,一般采用开关电源或线作为系统的控制核心,实现速度检测和控制算法。
系统软件设计实现系统的初始化、速度检测和控制主程序当速度超过设定值时,发出声音和灯报警子程序通过光电编码器或霍尔传感器读取速度信号,进行数据处理和速度值的计算。
速度检测子程序控制算法子程序根据控制算法子程序输出的控制信号,驱动电机转动,实现速度调节。
电机驱动子程序020103040504实验与分析实验设备与环境设备环境设定不同的速度控制指令,记录电动车在各个指令下的速度变化和稳定时间。
数据记录使用数据采集系统实时记录速度数据,并存储到计算机中进行分析。
实验过程实验过程与数据记录VS数据分析与结果展示数据分析结果展示05结论与展望研究结论成功设计了一种基于单片机的电动车速度控制系统,实现了对电动车速度的精确控制。
基于ATmega48单片机的电动自行车控制器的设计的开题报告
基于ATmega48单片机的电动自行车控制器的设计的开题报告一、课题背景电动自行车作为城市出行的一种常见交通工具,具有节能环保、使用简便、成本低等优点。
而电动自行车控制器则是控制电动自行车电机运转的重要部件。
电动自行车控制器通常包括几个功能模块,例如功率放大模块、速度控制模块、电池状态检测模块等。
目前,市面上的电动自行车控制器大多采用简单的模拟控制方式,样式较为单一,而且稳定性和安全性有待提高。
基于此,本项目拟设计一种基于ATmega48单片机的电动自行车控制器。
该控制器将采用数字信号处理技术,通过对电机驱动板进行控制,实现对电动自行车速度、加速、减速、制动等方面的精细控制。
二、课题研究目的本项目旨在设计一种稳定、可靠、安全的电动自行车控制器,主要包括以下三个方面的研究目的:1. 实现对电动自行车速度、加速、减速、制动等方面的精细控制。
利用数字信号处理技术对电机的运转进行控制,保证电动自行车在各种路况下的稳定性和安全性。
2. 提高电动自行车控制器的智能化水平。
通过采用ATmega48单片机,实现电动自行车控制器的智能化,增强其对各种情况下的自主判断和应对能力。
3. 对项目的可行性进行评估。
通过市场需求分析、技术方案研究、数学模型的建立等方法,对本项目进行可行性评估,为后期研发提供科学的参考依据。
三、课题研究内容及进度安排1.模拟电路设计及模块测试(预计完成时间:1个月)(1)功率放大模块的设计和测试。
根据电动自行车所需的功率大小,设计并搭建针对电机的功率放大电路,并对其电路参数进行测试和优化。
(2)速度测量和控制模块的设计和测试。
为了实现对电动自行车速度的准确控制,设计并实现一个精细的速度控制电路,并对其电路参数进行测试和优化。
(3)电池状态检测模块的设计和测试。
为了实现对电动自行车电池状态的实时检测,设计并实现一个电池状态检测电路,并对其电路参数进行测试和优化。
2.单片机控制程序编写及调试(预计完成时间:2个月)(1)单片机底层驱动程序编写。
基于单片机的电动自行车调速系统设计说明
基于单片机的电动自行车调速系统设计摘要:近年来,随着人们生活的改善,摩托车、燃油助力车得到迅速发展,其排放的尾气已造成城市空气严重污染,一些城市相继制定法规限制摩托车、燃油助力车的使用来保护环境。
发展短距离的绿色交通工具替代摩托车、燃油助力车成为一些国家的经济和社会课题。
电动自行车具有“零排放”,是一种比较好的短距离绿色交通工具。
由于电池问题,限制了电动自行车的行驶距离,但可以通过提高系统的效率来改善其性能。
本课题研制的电动自行车用无位置传感器直流无刷永磁电动机来驱动,用PIC16C74单片机作为主控芯片,它不仅克服了有刷直流电机的噪音、换向火花等缺点,而且避免了有位置传感器直流无刷电机因位置传感器带来的不足;同时,它降低了制造和使用过程中的成本,提高了使用和维护的方便性,具有效率高、环保、经济和方便的特点以及具有良好运行性能和巨大的市场潜力。
关键词:电动自行车;位置传感器;直流无刷电动机;单片机控制Based on the SCM system designspeed electric bicyclesAbstract:In the recent years,the motorbike has rapidly developed with the improving of living Chinese People. Because of air pollution of internal combustion engine the local governments of different cities in China come on a lot of rules of law to restrict the use of combustion engine and then to promote the environment protection. To replace the motorbike with a short green transportation has become some nations’ economic and social issue.This paper deals with an electric motor driven bike (EB) and its control stratagem. Without fail,EB 15 very helpful to environment protection. Nevertheless EB has its disadvantages,especially the too weak continuous run distance. Except the battery problem,the efficiency of the whole system 15 also one of the most important problems to be solved. A permanent brush-less and sensor-less DC motor and its control set are specially designed for this developed EB.A study on control stratagem and electronic resorts are given in this paper.A microchip PIC16C74 used as CPU and corresponding software developed by author 15 introduced in this control system. The experiments of the prototype show that the performance,including system efficiency,noise,spark,maintenance-free and its cost are obviously improved. It may be expected,that this EB driving system has really huge market potential.Key Words: Motor Bike;Position Sensor;BLDC Motor;Microcomputer controlled第1章概述1.1 电动自行车的意义及发展状况1.1.1 电动自行车的意义人类在进入工业化社会之后,大量使用地球上石油、煤等化石能源,使得空气中的二氧化碳和二氧化硫急剧增加,造成了酸雨蔓延和温室效应,特别是二十世纪后期,酸雨大面积扩展,几乎蔓延至所有国家,“厄尔尼诺现象”、“拉尼拉现象”频繁出现。
基于单片机的电动车控制器概要

目录1引言 (12总设计方案 (12.1 设计思路 (12.2单片机介绍 (12.3电动车介绍 (12.4 方案论证 (12.5 设计框图 (13设计原理 (23. 1硬件设计 (23.1.1最小系统 (23.1.2控制电路 (33.1.3驱动电路 (33.1.4显示电路 (43.2保护电路 (43. 2. 1 过流、欠压保护电路 (4 3. 2.2 刹车保护 (53.2.3低压指示灯 (53.3 软件设计 (53.3.1主程序设计 (64结束语 (6参考文献 (7附录1 (8附录2 (9基于单片机控制的电动车控制器摘要:电动车成为人类生活中越来越重要的交通工具。
电动车控制器主要有单片机、ADC0809、霍尔传感器、74LS164等组成。
通过单片机控制电动车,使电动机转速发生变化达到对电动车的控制的目的。
该设计具有结构简单、性能可靠使用方便、可实现较复杂的控制、具有防飞车保护和低压保护等重要的功能。
关键词:电动车单片机ADC0809 A44E1 引言单片机的出现给人类生活带来加大方便,使控制系统简单化。
本设计主要是设计一个由单片机控制的电动车控制系统,操作者可通过单片机系统控制电动车的转速,其旋转速度和当前电量可以在数码管上显示出来。
该设计具有结构简单、性能可靠使用方便。
2总设计方案2.1 设计思路根据电动车的工作原理可以知道,电动车控制器是通过霍尔转换器把采集的信号通过ADC0809数模转换器将模拟信号传给单片机,利用单片机控制、驱动电路及显示电路从而达到控制电动车的要求。
2.2 单片机介绍单片机即单片微型计算机,是将微处理器,一定容量的RAM和ROM以及I/O口,定时器等电路集成在一块芯片上,构成的单片微型计算机。
随着科学的发展,越来越多的智能化产品都用到了单片机,由于单片机的体积小、成本低、功能强被广泛应用于智能化产品和工业自动化上,而51系列单片机是各系列单片机中最典型和最有代表性的一种。
电动自行车控制器的设计-毕业论文(设计)
题目:电动自行车控制器的设计姓名:学号:系别:专业:指导教师:2013年5月18 日毕业论文(设计)作者声明本人郑重声明:所呈交的毕业论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
本人完全了解有关保障、使用毕业论文的规定,同意学校保留并向有关毕业论文管理机构送交论文的复印件和电子版。
同意省级优秀毕业论文评选机构将本毕业论文通过影印、缩印、扫描等方式进行保存、摘编或汇编;同意本论文被编入有关数据库进行检索和查阅。
本毕业论文内容不涉及国家机密。
论文题目:电动自行车控制器的设计作者单位:作者签名:(学号:年月日目录摘要 (1)引言 (2)1.现状及存在问题 (2)1.1电动自行车的现状 (2)1.2无刷直流电动机的发展现状 (3)1.3电动自行车控制器的研究现状及存在的问题 (4)2.电动自行车控制器的设计原理及硬件电路 (5)2.1主要元件的选取 (5)2.2系统设计的原理依据 (9)2.3整体硬件系统框图 (10)2.4模块电路的设计 (11)3. 系统软件设计 (15)3.1软件整体设计方案 (15)3.2子模块设计 (16)3.3抗干扰设计 (21)4.结果与分析 (21)5.展望 (24)参考文献 (24)致谢 (26)电动自行车控制器的设计摘要:针对目前电动自行车控制器的结构复杂、可靠性低、难以维护以及不易升级拓展的缺点,本设计提出了基于AT89S52单片机为主控芯片的无刷直流电机控制的设计方案。
由霍尔传感器采集的信号计算出转速,单片机通过PWM方式实现速度闭环控制;同时对电机相电流采样进行电流闭环控制;组成“速度-电流”双闭环控制系统。
利用无刷系统电子换向的特点,根据能量回馈制动原理实现柔性电子刹车。
结合高效的编程算法简化了系统结构,降低了系统成本,增强了系统性能,提升了骑行舒适度,可以满足不同应用场合的需求。
基于单片机的电动自行车智能控制系统设计及实现

基于单片机的电动自行车智能控制系统设计及实现近年来,随着社会的不断发展进步,人们的生活水平不断提高,对于交通工具的需求也更加迫切。
而电动自行车作为一种环保、经济、便利的出行工具,得到了越来越多人的青睐。
然而,普通的电动自行车还存在着一些问题,如续航能力、车速限制等,这时候电动自行车智能控制系统的出现便能够有效地解决这些问题。
一、控制系统的设计电动自行车智能控制系统主要由控制器、驱动器、传感器和人机交互界面四部分组成。
1.控制器控制器是电动自行车智能控制系统的核心部件,它主要负责控制电动自行车的电机转速和方向,以及通过接收传感器信息来监测电动车的状态。
通常情况下,我们会选择一款高性价比的单片机,如ATmega328P等,它的性能稳定、功耗低,且能够很好地支持各种外设的连接,非常适合作为电动自行车控制器的芯片。
2.驱动器驱动器是控制器和电动机之间的接口,它的主要任务是根据控制器的指令,控制电动机的工作状态。
驱动器使用高功率MOS管作为开关元件,能够支持电压和电流较大的电动机,在使用时需要特别注意安全问题。
3.传感器传感器是智能控制系统中的重要组成部分,它通过感知各种物理量的变化,并将其转换成可信的电信号,提供给控制器进行处理。
常用的传感器有速度传感器、电机温度传感器、电压传感器等,可以有效地监测电动自行车的状态,提高驾驶安全性。
4.人机交互界面人机交互界面包括显示器、按键等部分,它能够让车主实时了解电动车的状态,同时也可以通过按键来设置不同的工作模式。
智能控制系统的人机交互界面需要设计简洁易用、界面友好的界面,提高用户的体验感。
二、控制系统的实现在控制系统的实现过程中,需要注意以下几个问题:1.电路设计电动自行车智能控制系统的电路设计需要考虑到电源、开关、传感器等各个方面,保证整个系统的可靠性和安全性。
2.程序编写单片机程序的编写需要有一定的编程基础,同时需要结合控制器和驱动器的控制要求,编写出一套完整的控制程序,并对程序进行调试和优化,保证系统的稳定运行和高效性能。
[12]-1 基于51单片机设计的电动车控制器
![[12]-1 基于51单片机设计的电动车控制器](https://img.taocdn.com/s3/m/ee4a45bdcf2f0066f5335a8102d276a2002960fc.png)
二、系统架构
本系统由控制器、电机、驱动芯片、锂电池和按键等组成,其功能、特点如下:
(1)控制器:采用AT89S52微控制器,作为整个系统的核心控制部分。
控制器接收来自按键的信号,控制驱动芯片输出电机控制信号,从而实现对电动车的前后行驶、左右转向、加速等控制功能。
(2)电机:采用直流电机,其转速和转向可通过驱动芯片控制信号进行调节。
(3)驱动芯片:采用L298N驱动芯片,为电机提供驱动电流,并控制电机转速和转向。
L298N驱动芯片具有功率大、稳定性好等特点。
(4)锂电池:为电动车提供动力,具有体积小、能量密度高、充电效率高、自放电率低等优点。
(5)按键:用于控制和调节电动车的运行状态,包括前后行驶、左右转向、加速等操作。
三、系统设计。
PIC16F72单片机控制的电动自行车C源程序

PIC16F72单片机控制的电动自行车C源程序2008-02-21 15:35第一单片机»PIC单片机»PIC16F72单片机控制的电动自行车C源程序,原理图及设计说明2007-7-17 12:21 mcubestPIC16F72单片机控制的电动自行车C源程序,原理图及设计说明[table=98%][tr][td][color=black][u]PIC16F72单片机控制的电动自行车C源程序,原理图及设计说明[/u][/color][/td][/tr][tr][td][table=95%][tr][td]PIC16F72单片机控制的电动自行车驱动系统C程序PIC单片机控制的电动自行车驱动系统C程序.46.#include <pic.h>//电动车双闭环程序,采用双闭环方式控制电机,以得到最好的zh 转速性能,并且可以//限制电机的最大电流。
本应用程序用到两个CCP 部件,其中CCP1 用于PWM 输出,以控//制电机电压;CCP2 用于触发AD,定时器TMR2、TMR1,INT 中断,RB 口电平变化中断,//看门狗以及6 个通用I/O 口#define AND 0xe0 //状态采集5,6,7 位#define CURA 0X0a //电流环比例和积分系数之和#define CURB 0X09 //电流环比例系数#define THL 0X6400 //电流环最大输出#define FULLDUTY 0X0FF //占空比为1 时的高电平时间#define SPEA 0X1d //转速环比例和积分系数之和#define SPEB 0X1c //转速环比例系数#define GCURHILO 0X0330 //转速环最大输出#define GCURH 0X33 //最大给定电流#define GSPEH 0X67 //最大转速给定#define TSON 0X38 //手柄开启电压1.1 V,TSON*2 为刹车后手柄开启电压,即//2.2 V#define VOLON 0X4c //低电压保护重开电压3.0 V 即33 V#define VOLOFF 0X49 //低电压保护关断电压2.86 V 即31.5 Vvolatile unsigned char DELAYH,DELAYL,oldstate,speed,speedcount,tsh,count_ts,count_vol,gcur,currenth,voltage; //寄存器定义static bit sp1,spe,ts,volflag,spepid,lowpower,off,shutdown,curpid; //标志位定义static volatile unsigned char new[10]={0xaf,0xbe,0xff,0x7e,0xcf,0xff,0xd7,0x77,0xff,0xff}; //状态寄存器表//------------PIC16F877 初始化子程序------------void INIT877(){PORTC=0X0FF; //关断所有MOSFETTRISC=0X02; //设置C 口输出PIE1=0X00; //中断寄存器初始化,关断所有中断TRISA=0XCF; //设置RA4,RA5 输出TRISB=0XEF; //RB 口高三位输入,采集电机三相的霍尔信号PORTC=new[(PORTB&AND)>>5]; //采集第一次霍尔信号,并输出相应的信号,导通//两个MOS 管T2CON=0X01; //TMR2 4 分频CCPR1L=0X0FF; //初始时PWM 输出全高CCP1CON=0X0FF; //CCP1 设置为PWM 方式CCP2CON=0X0B; //CCP2 设置为特殊方式,以触发ADADCON0=0X81; //AD 时钟为32 分频,且AD 使能,选择AN0 通道采集手//柄电压TMR2=0X00; //TMR2 寄存器初始化TMR1H=0X00; //TMR1 寄存器初始化TMR1L=0X00;T1CON=0X00; //TMR1 为1 分频CCPR2H=0X08;CCPR2L=0X00; //电流采样周期设置为TAD=512 μsPR2=0XC7; //PWM 频率设置为5 kHzADCON1=0X02; //AD 结果左移OPTION=0XFB; //INT 上升沿触发TMR2ON=1; //PWM 开始工作INTCON=0XD8; //中断设置GIE=1,PEIE=1,RBIE=1ADIE=1; //AD中断使能speedcount=0x00; //转速计数寄存器speed=0x7f; //转速保持寄存器spe=1; //低速标志位sp1=1; //低速标志位oldstate=0x0ff; //初始状态设置,区别于其他状态count_ts=0x08; //电流采样8 次,采集1 次手柄count_vol=0x00; //采样256 次手柄,采集1 次电池电压ts=1; //可以采集手柄值的标志位ADGO=1; //AD采样使能TMR1ON=1; //CCP2 部件开始工作}//------------延时子程序---------------#pragma interrupt_level 1void DELAY1(x)char x;{DELAYH=x; //延时参数设置#asmDELAY2 MOVLW 0X06MOVWF _DELAYLDELAY1 DECFSZ _DELAYLGOTO DELAY1DECFSZ _DELAYHGOTO DELAY2#endasm}//-----------状态采集子程序----------------------void sample(){char state1,state2,state3,x;do {x=1;state1=(PORTB&AND); //霍尔信号采集DELAY1(x);state2=(PORTB&AND);}while(state1-state2); //当三次采样结果不相同时继续采集状态if(state1-oldstate!=0) //看本次采样结果是否与上次相同,不同//则执行{oldstate=state1; //将本次状态设置为旧状态state1=(oldstate>>5);PORTC=new[state1]; //C 口输出相应的信号触发两个MOS 管if(sp1==1){spe=1;sp1=0;}else { //如果转速很低,则spe 置1spe=0;sp1=0;speedcount<<=1;state3=(TMR1H>>2); //否则,spe=0,计转速speed=speedcount+state3; //speed 寄存器为每256 μs 加1}speedcount=0;}}//-----------------AD 采样子程序---------------------- void AD(){char x;ADIF=0; //清AD 中断标志位if(ts==1){ //如果为手柄采样,则采样手柄值CHS0=1; //选择电流采样通道count_vol=count_vol+1; //电池采样计数寄存器spepid=1; //置转速闭环运算标志ts=0;tsh=ADRESH; //存手柄值if(count_vol==0) { //如果电池采样时间到,则选择AN2 通道,采集电池电压CHS0=0;CHS1=1;volflag=1;x=1;DELAY1(x);ADGO=1;}}else if(volflag==1) { //电池采样完毕,进行相应的处理CHS1=0;CHS0=1;volflag=0;voltage=ADRESH;lowpower=1;}else { //否则,中断为采样电流中断speedcount=speedcount+1; //speedcount 寄存器加1,作为测量转速用if(speedcount>0x3d) sp1=1; //如果转速低于1 000 000 μs/(512 μs*3eh*3) // 则认为为低速状态currenth=ADRESH;curpid=1;count_ts=count_ts-1;if(count_ts==0) { //如果手柄时间到,则转入手柄采样通道CHS0=0;count_ts=0x08;ts=1;x=1;DELAY1(x);ADGO=1;}}}//-------------刹车处理子程序------------------void BREAKON(){char x;off=0; //off清零,如果是干扰则不复位shutdown=0;if(RB0==1) { //如果刹车信号为真,则停止输出电压ADIE=0; //关AD 中断INTE=0; //关刹车中断CCPR1L=FULLDUTY; //输出电压0TMR1ON=0; //关CCP2,不再触发ADfor(;ADGO==1;) continue;//如正在采样,则等待采样结束ADIF=0; //ADIF 位清零CHS0=0; //选择通道0 采样手柄CHS1=0;x=1;DELAY1(x);do {ADGO=1;for(;ADIF==0;)continue;ADIF=0;CCPR1L=FULLDUTY;asm("CLRWDT");tsh=(ADRESH>>1);}while(tsh>TSON||RB0==1); //当手柄值大于2.2 V 或刹车仍旧继续时,执行以//上语句off=1; //置复位标志}}//---------欠保护子程序-------------------void POWER(){char x;lowpower=0;voltage>>=1; //电压值换为7 位,以利于单字节运算if(voltage<VOLOFF) { //电池电压小于3*k(V)时保护ADIE=0;INTE=0;TMR1ON=0;CCPR1L=FULLDUTY;for(;ADGO==1;)continue;ADIF=0;CHS0=0;CHS1=1;x=1;DELAY1(x);do{ADGO=1;for(;ADIF==0;)continue;ADIF=0;voltage=(ADRESH>>1);CCPR1L=FULLDUTY;asm("CLRWDT");}while(voltage<VOLON); //电池电压小于35 V 时继续保护off=1; //置复位标志}}//------------电流环运算子程序-----------------void CURPI(){ static int curep=0x00,curek=0x00,curuk=0x00;union data{int pwm;char a[2];}b; //定义电流环运算寄存器curpid=0; //清电流运算标志curep=curek*CURB; //计算上一次偏差与比例系数的积if(currenth<2)currenth=2; //如果采样电流为零,则认为有一个小电流以利于//使转速下降currenth>>=1;curek=gcur-currenth; //计算本次偏差curuk=curuk+curek*CURA-curep; //按闭环PI 运算方式得到本次输出结果,下//面对结果进行处理if(curuk<0x00) { //如果输出小于零,则认为输出为零curuk=0;CCPR1L=FULLDUTY;CCP1X=0;CCP1Y=0;}else if(curuk-THL>=0) { //如果输出大于限幅值,则输出最大电压curuk=THL;CCPR1L=0;CCP1X=0;CCP1Y=0;}else { //否则,按比例输出相应的高电平时间到CCPR1 寄存器b.pwm=THL-curuk;b.pwm<<=1;CCPR1L=b.a[1]; //CCPR1L=(b.pwm>>8)&0x0ff;将PWM 寄存器的高半字节if(b.pwm&0x80!=0) CCP1X=1;else CCP1X=0;if(b.pwm&0x40!=0) CCP1Y=1;else CCP1Y=0;}}//---------------转速环运算子程序-----------------------void SPEPI(){ static int speep=0x00,speek=0x00,speuk=0x00;int tsh1,speed1; //转速寄存器定义spepid=0; //清转速运算标志if(spe==1) speed1=0x00; //若转速太低,则认为转速为零else speed1=0x7f-speed; //否则计算实际转速if(speed1<0) speed1=0;speep=speek*SPEB;tsh1=tsh-0x38; //得到计算用的手柄值speek=tsh1-speed1;if(tsh1<0) {speuk=0;gcur=0;} //当手柄值低于1.1 V 时,则认为手柄给定为零else { //否则,计算相应的转速环输出if(tsh1>=GSPEH) //限制最大转速tsh1=GSPEH;speuk=speuk+speek*SPEA-speep; //计算得转速环输出if(speuk<=0X00) {speuk=0x00;gcur=0x00;}//转速环输出处理else if(speuk>GCURHILO) { //转速环输出限制,即限制最大电流约12 A speuk=GCURHILO;gcur=GCURH;}else { //调速状态时的输出gcur=(speuk>>4)&0x0ff;}}}//-----------主程序-------------------------main(){for(;;){INIT877(); //单片机复位后,先对其进行初始化off=0; //清复位标志for(;off==0;) { //复位标志为零,则执行下面程序,否则复位if(curpid==1) CURPI(); //电流PI 运算else if(spepid==1) SPEPI(); //转速PI 运算else if(lowpower==1) POWER();else if(shutdown==1) BREAKON();asm("CLRWDT");}}}//---------中断服务子程序---------------------#pragma interrupt_level 1void interrupt INTS(void){if(RBIF==1) {RBIF=0;sample();}else if(ADIF==1) AD();else if(INTF==1) {shutdown=1;INTF=0;} //刹车中断来,置刹车标志设计思路:目的目前电动车市场各种功能无刷控制器琳琅满目,种类繁多。
基于PIC16F73单片机的电动自行车控制器设计
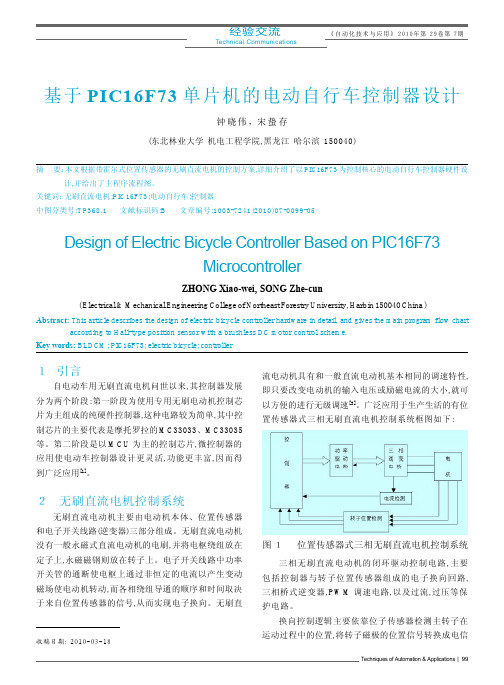
图 1 位置传感器式三相无刷直流电机控制系统
三相无刷直流电动机的闭环驱动控制电路, 主要 包括控制器与转子位置传感器组成的电子换向回路, 三相桥式逆变器,PWM 调速电路,以及过流,过压等保 护电路。
换向控制逻辑主要依靠位子传感器检测主转子在 运动过程中的位置, 将转子磁极的位置信号转换成电信
关键词: 无刷直流电机;PIC16F73;电动自行车;控制器 中图分类号:TP368.1 文献标识码:B 文章编号:1003-7241(2010)07-0099-05
Design of Electric Bicycle Controller Based on PIC16F73
Microcontroller
according to Hall-type position sensor with a brushless DC motor control scheme. Key words: BLDCM; PIC16F73; electric bicycle; controller
1 引言
自电动车用无刷直流电机问世以来, 其控制器发展 分为两个阶段: 第一阶段为使用专用无刷电动机控制芯 片为主组成的纯硬件控制器,这种电路较为简单,其中控 制芯片的主要代表是摩托罗拉的 MC33033、MC33035 等。第二阶段是以 MCU 为主的控制芯片, 微控制器的 应用使电动车控制器设计更灵活, 功能更丰富, 因而得 到广泛应用[1]。
图 4 电源电路 第二组电源是 5V,由集成芯片 LM78L05 提供,在整
100 | Techniques of Automation & Applications
经验交流
Technical Communications
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
① 收 稿 日期 :2017—03—20 作者简介 :何全陆(1960一),男 ,安徽芜湖人 ,高级专利工程师 ,副教授 ,研 究方 向 :知识产权 和机械设计 。
第 3期
何 全 陆 :基 于单 片机 的 电动 自行 车控 制 器设 计
407
图 2 无刷直流电机控制系统
2 硬件 电路设计
中图分 类 号 : TP332
文献 标识 码 : A
O 引 言
随着 经济 和科技 的快 速 发展 ,人 民生 活水平 的 提 高 ,电动 自行 车逐 渐取 代人 力 自行 车 ,以其轻 巧 、 方 便 、环保 等优 点 受 到 人们 的青 睐 ,成 为 当前 社 会 人 们 主要 的代 步工具 。当前 主 流 的 电动 自行 车 ,电 动 摩托 车 大都是 通 过直 流供 电 ,对 无刷 直 流 电机 进 行 控制 ,通 过对 电源 电压 的调 节 实现对 无 刷直 流 电 机 的速 度控 制 。 电动 自行 车 主要 有 车身 、电机 、电 源和控 制 器组 成 。 电动 自行 车 控 制 器按 照功 率 的 大小 可分 为 :小 功率 、中功 率 、大 功 率 三类 ,电动 自 行 车 一般 使用 小功 率 的 ,货运 三 轮车 和 电动摩 托 车 使 用 中功 率和 大 功 率 的 。 电动 自行 车 的控 制 器 是 电动 自行 车 的大 脑 ,控 制 电 动 自行 车 各 种 运 动 状 态 ,控 制器 的好 坏 直 接 影 响 着 电 动 自行 车 的工 况 , 因此研 发 一款 高性 能 、低 耗 能 、使 用 方便 的 电动 自 行 车控 制 器是 当务 之急 。
CPU),程 序 和 数 据 分Leabharlann 别 进 行 存 储 ,速 度 可 达
24MHz;功率 驱动 电路 把单 片机 输 出 的信 号进 行 放
大 ,驱 动功 率 开关 管 一M手O一 SFE~T鲫导一 通~ 或 关~ 断 ,通 过 逆 变 电路驱 动无 刷直 流 电机运 行 ;霍 尔位 置 传感 器将
基 于 单 片 机 的 电动 自行 车 控 制器 设 计①
何 全 陆
(芜 湖职 业技 术 学 院 。安 徽 芜 湖 241000)
摘 要 : 通 过 对现 有 电动 自行 车控 制 管理 的 分析 ,设 计 了一款 基 于 单 片机 CY8C24533的控 制
器 ,详 细设计 了 电源 电路 、霍 尔位 置检 测 电路 ,在 硬件 电路 上采 用功率 开 关管控 制驱 动 电路 ,根 据
控 制 需求通 过软 件 编程输 出不 同 占空 比 的 PWM 波 形 ,对 电动 自行 车 的 运 行 速度 进 行 有 效 的调
节 ;在 线采 集各 种信 息 ,依 据信 息不 同调 用不 同的子 程序 ,各种 功 能得 以有 效 、安 全 的 实现 。
关 键词 : 单 片机 ;无刷 直流 电机 ;控制 器 ;检测
第 35卷 第 3期 2017 年 O5 月
佳 木 斯 大 学 学 报 ( 自 然 科 学 版 ) Journal of Jiamusi University(Natural Science Edition)
文 章 编 号 :1008—1402(2017)O3—0406一O3
Vo1.35 No.3 M av 2017
1 电动 自行 车 控 制 器 总 体 设 计
电动 自行 车 自上 世 纪 80年 代 发 明 以来 ,经 历 了一个 漫 长 的发展 过 程 ,与 汽 车 、摩 托 车 相 比少 了 废 气 、噪 音 和 污染 ,以好 驾 驶 、速 度 低 、安 全 等优 势 近年得 到 了迅 速 的 发 展 。 电动 自行 车 控制 器 如 图 1所 示 ,主要有 :微 处理 器 、手 把 电路 、刹 车 电路 、功 率驱动电路 、逆变 电路 、霍尔位置检测电路 和外 围 保 护 电路 组 成 。微 处 理 器 采 用 CY8C24533芯 片 , 该 芯 片 采 用 8 位 哈 佛 结 构 处 理 器 内 核 (M8C
转子磁钢位置变换成电信号 ,控制 电子开关线路 ,
_II. .. ..H
使 定 子各 绕组 按顺 序导 通 。
一 一
一~
一
~
一 譬 一: =、
图 1 电 动 自行 车 控 制 系 统框 图
1.1 无刷 直 流 电机控 制 系统
无 刷直 流 电机 克 服 了有 刷 直 流 电机 的机 械换 向的缺点 ,随 着 电力 电 子技 术 和 半 导 体 技 术 的发 展 ,无刷 直流 电机 得到 了快 速 的发展 和应 用 。如 图 2所 示 为无 刷直 流 电机 控 制 系统 ,VT1一VT6为功 率 开关管 ,u0为 直 流 电源 ,M 为无 刷 直 流 电机 ,位 置传 感器 与 电机本 体 同轴 连接 ,控制 器采 集位 置传 感器 的信 号 ,然后 将 该 信 号 转 换 为 驱 动信 号 ,驱 动 电路对驱动信号进行隔离放大 ,有序控制功率开关 管 VT1一VT6的导 通 与关 断 ,使 电机 的 绕组 产 生旋 转磁 场有 序工 作 。
图 4 霍 尔 位 置检 测 电路
2.1 电源 电路
如 图 3所示 ,电源 电路 有 由 LM317和 7805以 及分 立元 件构 成 的两级 电路 ,经过 两级 电路 得到所 需 的 +5V 电压 。R1为分 压 电阻 ,R2和 R3为 外部 调 节 电 阻 ,c2、c3和 c4为 滤 波 电 容 ,滤 除 输 入 电 源 中的高 频 成 分 ,48伏 电压 经 过 LM317调 整输 出 15V电压 ,该 电 压 作 为 7805 的输 入 电源 ,经 7805 调 整后 得到 +5V 电压 ,即控制 器 元 器 件 所 需 的工 作 电压 ,为 了避免 出现 输 出的高 脉 冲电压 对 电路 造 成 损 害 ,通 过 c5和 c6组 成 的 滤波 电路 ,c7和 C8 稳定 输 出 。