PWM 应用实例
PWM基本原理及其应用实例
PWM基本原理及其应用实例PWM基本原理及其应用实例2009-06-26 14:12:02| 分类:嵌入式技术探索| 标签:|字号大中小订阅~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~理论篇(一)原理介绍~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,PWM控制技术正是有赖于在逆变电路中的应用,才确定了它在电力电子技术中的重要地位。
1 PWM控制的基本原理理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
面积等效原理:分别将如图1所示的电压窄脉冲加在一阶惯性环节(R-L 电路)上,如图2a所示。
其输出电流i(t)对不同窄脉冲时的响应波形如图2b所示。
从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。
脉冲越窄,各i(t)响应波形的差异也越小。
如果周期性地施加上述脉冲,则响应i(t)也是周期性的。
用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N等分,看成N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲量)相等,宽度按正弦规律变化。
SPWM波形——脉冲宽度按正弦规律变化而和正弦波等效的PWM波形。
图3 用PWM波代替正弦半波要改变等效输出正弦波幅值,按同一比例改变各脉冲宽度即可。
PWM电流波:电流型逆变电路进行PWM控制,得到的就是PWM电流波。
脉冲电路PWM调制PPT课件

脉冲宽度
指高电平持续的时间,通常用占空比表示,即脉冲宽度与周期的比 值。
PWM调制的基本原理
通过改变脉冲宽度来等效改变输出电压或电流的大小。
PWM信号的生成原理
采样控制理论
PWM信号的生成基于采样控制理论,通过对输入信号进行采样,并根据采样结果生成相 应的PWM信号。
电流模式控制PWM调制是通过检测输出电流的占空比来实现对输出电流的控制。
电流模式控制PWM调制具有电流响应速度快、控制精度高等优点,因此在许多应用 中得到广泛应用。
电流模式控制PWM调制的主要缺点是可能会产生较大的输出电流纹波。
电压和电流模式比较
电压模式控制PWM调制和电流模式控制PWM调制各有优缺点,具体选择哪种方式要根据 实际应用需求来决定。
PWM调制技术在能源转换、电机控制、通 信等领域具有广泛的应用前景,随着技术 的不断成熟,其应用领域将进一步拓展。
经济价值
社会效益
PWM调制技术的推广应用将带来显著的经 济效益,有助于推动相关产业的发展和经 济增长。
PWM调制技术的节能减排效果明显,对于 应对全球气候变化、推动可持续发展具有 重要意义。
04 PWM调制在脉冲电路中 的优势与挑战
PWM调制在脉冲电路中的优势
高效能
PWM调制能够有效地控 制脉冲宽度,从而提高 脉冲电路的能量效率。
灵活性高
PWM调制允许在单个脉 冲中实现多个级别的电 压或电流,从而提供更
大的灵活性。
易于实现
PWM调制可以通过简单 的数字或模拟电路实现, 降低了设计和实现的复
线性度
PWM信号的线性度取决于采样电 路和PWM生成电路的设计,高质 量的PWM信号应具有良好的线性
使用PWM得到精密的输出电压

使用PWM得到精密的输出电压作者:江南大学 朱 立近年来,许多单片机生产厂家,如Atmel、Analog Divices、Intel、Philips、Dallas、Maxim等等,纷纷推出了新型的高速单片机。
它们的指令执行周期仅是原来的1/3~1/十几,并在单片机中集成了EEPROM、WDT、A/D转换器和D/A转换器,大大地提高了单片机的性能,方便了用户。
然而,许多单片机中的D/A转换器的输出都采用了脉宽调制(PWM)的形式。
PWM十分适用于开关电源、可控硅等器件的控制,也可使用于LCD 亮度控制、音频输出等不需要输出精确电压的场合。
由于PWM没有基准电压,它的输出脉冲的幅度不是很恒定,这就限制了PWM的使用范围。
在要求输出精密控制电压的场合,如精密可调电压源、电机变频器等等,就无法使用PWM。
然而,只需使用2片廉价的集成电路就可以把幅度不恒定的PWM输出转换成精密的PWM输出电压。
1 电路原理使用三端精密基准电源和模拟开关得到电压精密的PWM脉冲的电路原理如图1所示。
D1为TL431三端基准电压集成电路,U1采用单刀双掷的模拟开关MAX4544;电阻R1、R2、R3根据具体的需要而定。
当然,也可以采用其它型号的集成电路。
当PWM脉冲为高电平(逻辑1)时,U1的COM端掷向常闭端(NC),TL431的调整脚与正电压脚相连,输出电压值为2.5 V。
当PWM脉冲为低电平(逻辑0)时,U1的COM端掷向常开端(NO),TL431的输出电压经过R2、R3 分压后送到调整脚,此时输出电压值等于[(R2+R3)/R3]×2.5 V。
本例中输出电压等于8 V。
这样,当U1的IN 脚输入PWM信号时,电路相应地输出高电平为8 V,低电平为 2.5 V的PWM脉冲,其振幅为8 V - 2.5 V = 5.5 V 。
如果需要输出低电平为零的PWM信号,则再加上1个差分放大器就可解决。
在对于精密度的要求不是很高的场合,可以采用更简单的方法。
PWM逆变电路及其控制方法
PWM逆变电路及其控制方法PWM(Pulse Width Modulation)逆变电路是一种通过改变电压或电流波形的占空比来实现电能转换的技术。
它广泛应用于各种电源逆变器、交流电机驱动器、太阳能逆变器、UPS(不间断电源系统)等领域。
本文将介绍PWM逆变电路的基本原理、常见的控制方法以及应用实例。
PWM逆变电路的基本原理是通过将直流电压转换为交流电压,使得输出波形的频率和幅值可以根据需求进行调节。
其核心部件是逆变器,通常由开关元件(如功率开关管)和输出变压器组成。
逆变器通过快速开关开关闭合,产生一系列电压脉冲,然后经过输出变压器将直流电压转换为交流电压。
PWM逆变电路的控制方法有多种,常见的包括:固定频率脉宽调制(Fixed Frequency Pulse Width Modulation,FFPWM)、固定频率电压脉宽调制(Constant Frequency Voltage Pulse Width Modulation,CFVPWM)、固定频率电流脉宽调制(Constant Frequency Current Pulse Width Modulation,CFCPWM)以及多重脉冲脉宽调制(Multiple Pulse Width Modulation,MPWM)等。
固定频率脉宽调制是PWM逆变电路中最简单的控制方法之一,其特点是输出频率和开关频率固定,可以通过调节脉宽来实现输出波形的幅值控制。
固定频率电压脉宽调制在固定频率脉宽调制的基础上增加了电压控制环节,通过反馈控制使输出电压达到设定值。
固定频率电流脉宽调制则在固定频率脉宽调制的基础上增加了电流控制环节,通过反馈控制使输出电流达到设定值。
多重脉冲脉宽调制是在固定频率脉宽调制的基础上引入多个脉冲周期,通过交错控制来改善输出波形的谐波含量。
1.电力电子逆变器:将直流电能转换为交流电能。
通过控制PWM逆变电路的开关元件,可以实现交流电压的频率和幅值的调节,广泛应用于电力系统、电动机驱动器及电力调速系统等。
STC12C5A60S2内部PWM应用
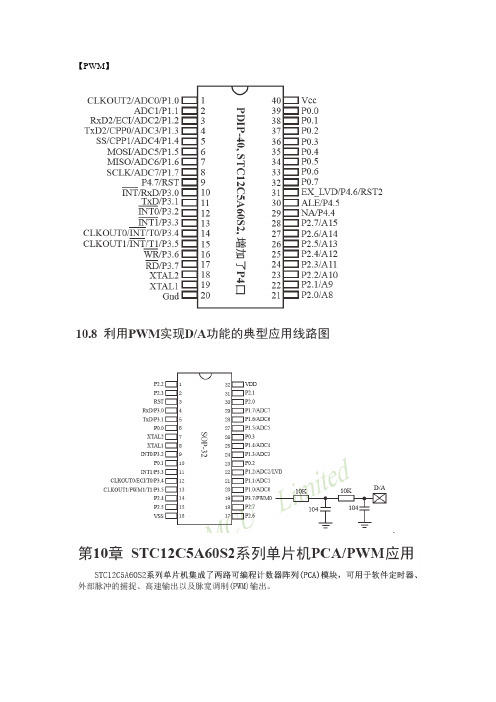
【PWM】.实例一:电路图如上,该程序的功能是利用按键S1对LED的亮度进行调节。
程序如下:#include"STC12C5A.h"//注意这个头文件,用reg52是不行的,如果你没有的话,可以去百// //度文档里搜索“STC12C5A系列单片机头文件”,有我共享的头文件。
void delay(unsigned int cnt){unsigned char i;for(;cnt>0;cnt--)for(i=0;i<250;i++);}void main(){CCON=0; //PCA初始化CL=0; //PCA的16位计数器低八位CH=0; //PCA的16位计数器高八位CMOD=0x00; //选择系统时钟/12 为计数脉冲,则PWM的频率f=sysclk/256/12;CCAP0H=0x80; // 占空比控制CCAP0L=0x80;PCA_PWM0=0x00; //控制占空比的第九位为0CCAPM0=0x42; //允许P13作为PWM输出CR=1; //启动PCA计数器while(1){if(P10==0){delay(200);while(P10==0);CCAP0H+=10; //占空比调节CCAP0L+=10;}}}实例二:两个文件main.c#include <REG51.H>#include <intrins.h>#define U8 unsigned char#define U16 unsigned intvoid DelayMs(U8 ms);void PWM_clock(U8 clock);void PWM_start(U8 module,U8 mode);////////////////////// 延时子程序/////////////////////////////void DelayMs(U8 ms) //在11.0592M晶振下,stc10f系列(单周期指令)的ms级延时{U16 i;while(ms--){for(i = 0; i < 850; i++);}}////////////////////主函数入口////////////////////////////sfr CCON = 0xD8; //PCA控制寄存器sfr CMOD = 0xD9; //PCA模式寄存器sfr CCAPM0 = 0xDA; //PCA模块0模式寄存器//模块0对应P1.3/CEX0/PCA0/PWM0(STC12C5A60S2系列)sfr CCAPM1 = 0xDB; //PCA模块1模式寄存器//模块1对应P1.4/CEX1/PCA1/PWM1(STC12C5A60S2系列)sfr CL = 0xE9; //PCA 定时寄存器低位sfr CH = 0xF9; //PCA 定时寄存器高位sfr CCAP0L = 0xEA; //PCA模块0的捕获寄存器低位sfr CCAP0H = 0xFA; //PCA模块0的捕获寄存器高位sfr CCAP1L = 0xEB; //PCA模块1的捕获寄存器低位sfr CCAP1H = 0xFB; //PCA模块1的捕获寄存器高位sfr PCA_PWM0 = 0xF2; //PCA PWM 模式辅助寄存器0sfr PCA_PWM1 = 0xF3; //PCA PWM 模式辅助寄存器1sbit CF = 0xDF; //PCA计数溢出标志位sbit CR = 0xDE; //PCA计数器运行控制位sbit CCF1 = 0xD9; //PCA模块1中断标志sbit CCF0 = 0xD8; //PCA模块0中断标志//* CCAPOH = CCAPOL = 0XC0; //模块0输出占空因数为25%//* CCAPOH = CCAPOL = 0X80; //模块0输出占空因数为50%//* CCAPOH = CCAPOL = 0X40; //模块0输出占空因数为75%void PWM_clock(U8 clock);void PWM_start(U8 module,U8 mode);void PWM_clock(U8 clock){CMOD |= (clock<<1);CL = 0x00;CH = 0x00;}void PWM_start(U8 module,U8 mode){CCAP0L = 0XC0;CCAP0H = 0XC0; //模块0初始输出占空因数为25%CCAP1L = 0XC0;CCAP1H = 0XC0; //模块1初始输出占空因数为25%if(module==0){switch(mode){case 0: CCAPM0 = 0X42;break; //模块0设置为8位PWM输出,无中断case 1: CCAPM0 = 0X53;break; //模块0设置为8位PWM输出,下降沿产生中断case 2: CCAPM0 = 0X63;break; //模块0设置为8位PWM输出,上升沿产生中断case 3: CCAPM0 = 0X73;break; //模块0设置为8位PWM 输出,跳变沿产生中断default: break;}}elseif(module==1){switch(mode){case 0: CCAPM1 = 0X42;break; //模块1设置为8位PWM输出,无中断case 1: CCAPM1 = 0X53;break; //模块1设置为8位PWM输出,下降沿产生中断case 2: CCAPM1 = 0X63;break; //模块1设置为8位PWM输出,上升沿产生中断case 3: CCAPM1 = 0X73;break; //模块1设置为8位PWM输出,跳变沿产生中断default: break;}}elseif(module==2){switch(mode){case 0: CCAPM0 = CCAPM1 = 0X42;break; //模块0和1设置为8位PWM输出,无中断case 1: CCAPM0 = CCAPM1 = 0X53;break; //模块0和1设置为8位PWM输出,下降沿产生中断case 2: CCAPM0 = CCAPM1 = 0X63;break; //模块0和1设置为8位PWM输出,上升沿产生中断case 3: CCAPM0 = CCAPM1 = 0X73;break; //模块0和1设置为8位PWM输出,跳变沿产生中断default: break;}}CR=1; //PCA计数器开始计数}void PCA_Intrrpt(void) interrupt 7{if(CCF0) CCF0=0;if(CCF1) CCF1=0; //软件清零if(CF) CF=0; //软件清零}void main(){TMOD|=0x02; /* timer 0 mode 2: 8-Bit reload */TH0=0xff;TR0=1;PWM_clock(2); // PCA/PWM时钟源为定时器0的溢出PWM_start(0,0); // 模块0,设置为PWM输出,无中断,初始占空因素为25%while(1){DelayMs(250);}}PwmDrive_12C5A.c#include <intrins.h>#define U8 unsigned charsfr CCON = 0xD8; //PCA控制寄存器sfr CMOD = 0xD9; //PCA模式寄存器sfr CCAPM0 = 0xDA; //PCA模块0模式寄存器//模块0对应P1.3/CEX0/PCA0/PWM0(STC12C5A60S2系列)sfr CCAPM1 = 0xDB; //PCA模块1模式寄存器//模块1对应P1.4/CEX1/PCA1/PWM1(STC12C5A60S2系列)sfr CL = 0xE9; //PCA 定时寄存器低位sfr CH = 0xF9; //PCA 定时寄存器高位sfr CCAP0L = 0xEA; //PCA模块0的捕获寄存器低位sfr CCAP0H = 0xFA; //PCA模块0的捕获寄存器高位sfr CCAP1L = 0xEB; //PCA模块1的捕获寄存器低位sfr CCAP1H = 0xFB; //PCA模块1的捕获寄存器高位sfr PCA_PWM0 = 0xF2; //PCA PWM 模式辅助寄存器0sfr PCA_PWM1 = 0xF3; //PCA PWM 模式辅助寄存器1sbit CF = 0xDF; //PCA计数溢出标志位sbit CR = 0xDE; //PCA计数器运行控制位sbit CCF1 = 0xD9; //PCA模块1中断标志sbit CCF0 = 0xD8; //PCA模块0中断标志//* CCAPOH = CCAPOL = 0XC0; //模块0输出占空因数为25%//* CCAPOH = CCAPOL = 0X80; //模块0输出占空因数为50%//* CCAPOH = CCAPOL = 0X40; //模块0输出占空因数为75%void PWM_clock(U8 clock);void PWM_start(U8 module,U8 mode);void PWM_clock(U8 clock){CMOD |= (clock<<1);CL = 0x00;CH = 0x00;}void PWM_start(U8 module,U8 mode){CCAP0L = 0XC0;CCAP0H = 0XC0; //模块0初始输出占空因数为25%CCAP1L = 0XC0;CCAP1H = 0XC0; //模块1初始输出占空因数为25%if(module==0){switch(mode){case 0: CCAPM0 = 0X42;break; //模块0设置为8位PWM输出,无中断case 1: CCAPM0 = 0X53;break; //模块0设置为8位PWM输出,下降沿产生中断case 2: CCAPM0 = 0X63;break; //模块0设置为8位PWM输出,上升沿产生中断case 3: CCAPM0 = 0X73;break; //模块0设置为8位PWM输出,跳变沿产生中断default: break;}}elseif(module==1){switch(mode){case 0: CCAPM1 = 0X42;break; //模块1设置为8位PWM输出,无中断case 1: CCAPM1 = 0X53;break; //模块1设置为8位PWM输出,下降沿产生中断case 2: CCAPM1 = 0X63;break; //模块1设置为8位PWM输出,上升沿产生中断case 3: CCAPM1 = 0X73;break; //模块1设置为8位PWM输出,跳变沿产生中断default: break;}}elseif(module==2){switch(mode){case 0: CCAPM0 = CCAPM1 = 0X42;break; //模块0和1设置为8位PWM输出,无中断case 1: CCAPM0 = CCAPM1 = 0X53;break; //模块0和1设置为8位PWM输出,下降沿产生中断case 2: CCAPM0 = CCAPM1 = 0X63;break; //模块0和1设置为8位PWM输出,上升沿产生中断case 3: CCAPM0 = CCAPM1 = 0X73;break; //模块0和1设置为8位PWM输出,跳变沿产生中断default: break;}}CR=1; //PCA计数器开始计数}void PCA_Intrrpt(void) interrupt 7{if(CCF0) CCF0=0;if(CCF1) CCF1=0; //软件清零if(CF) CF=0; //软件清零}(注:文档可能无法思考全面,请浏览后下载,供参考。
灯光驱动的原理及应用实例

灯光驱动的原理及应用实例1. 灯光驱动的原理灯光驱动是指通过电流或电压来控制灯光的亮度或颜色的技术。
在灯光驱动中,常见的原理包括电流驱动和电压驱动。
1.1 电流驱动电流驱动是指通过控制电流的大小来调控灯光的亮度。
常见的电流驱动方式有直流电流驱动和交流电流驱动。
直流电流驱动直流电流驱动是指通过直流电源提供恒定的电流来驱动灯光。
这种驱动方式具有稳定性高、可靠性好的特点。
常见的直流电流驱动方式有线性驱动和开关驱动。
•线性驱动:通过调节线性变阻器、电流源或电压源的输出来改变灯光的亮度。
这种驱动方式简单可靠,但效率较低,决定约束较大。
•开关驱动:通过开关元件(如MOSFET、晶闸管等)的通断控制来改变灯光的亮度。
这种驱动方式具有高效率、体积小和功耗低的特点,被广泛应用。
交流电流驱动交流电流驱动是指通过交流电源提供变化的电流来驱动灯光。
常见的交流电流驱动方式有脉宽调制(PWM)和脉冲电流驱动。
•脉宽调制(PWM):通过调节脉冲的宽度和周期来控制灯光的亮度。
这种驱动方式通过高频开关,并调整开关的占空比来实现亮度调节。
•脉冲电流驱动:通过将电流分成多个脉冲进行驱动,从而控制灯光的亮度。
这种驱动方式被广泛应用于可调光的灯具中。
1.2 电压驱动电压驱动是指通过控制电压的大小来调控灯光的亮度。
常见的电压驱动方式有恒压驱动和恒流驱动。
恒压驱动恒压驱动是指通过提供恒定的电压来驱动灯光。
这种驱动方式适用于需要调节灯具亮度的场景。
常见的恒压驱动器有线性驱动器和开关驱动器。
•线性驱动器:通过调节线性变阻器、电流源或电压源的输出来改变灯光的亮度。
这种驱动方式简单可靠,但效率较低,决定约束较大。
•开关驱动器:通过开关元件(如MOSFET、晶闸管等)的开关行为来控制灯光的亮度。
这种驱动方式具有高效率、体积小和功耗低的特点,被广泛应用。
恒流驱动恒流驱动是指通过提供恒定的电流来驱动灯光。
这种驱动方式适用于需要保持光源亮度恒定的场景。
常见的恒流驱动方式有线性驱动和开关驱动。
360度舵机控制角度的pwm值

360度舵机控制角度的pwm值摘要:1.360 度舵机的特点2.PWM 值的概念3.360 度舵机控制角度的方法4.PWM 值对360 度舵机角度控制的影响5.实例:通过更改PWM 值控制360 度舵机旋转圈数正文:一、360 度舵机的特点360 度舵机是一种可以旋转360 度的精密控制设备,广泛应用于机器人、无人机等领域。
它的特点是可以无极调节旋转角度,但不能像180 度舵机那样精确控制角度。
二、PWM 值的概念PWM(Pulse Width Modulation)即脉冲宽度调制,是一种模拟信号处理技术。
通过改变脉冲的宽度来控制电机的转速和方向。
在360 度舵机控制中,PWM 值可以控制舵机的速度和旋转方向。
三、360 度舵机控制角度的方法由于360 度舵机无法精确控制旋转角度,因此只能通过控制旋转方向和速度来实现对角度的控制。
在实际应用中,可以通过改变PWM 值来控制舵机的旋转速度和方向。
四、PWM 值对360 度舵机角度控制的影响PWM 值越大,舵机的旋转速度越快;PWM 值越小,舵机的旋转速度越慢。
同时,PWM 值的正负可以控制舵机的旋转方向。
通过改变PWM 值,可以实现对360 度舵机旋转速度和方向的控制,从而实现对角度的控制。
五、实例:通过更改PWM 值控制360 度舵机旋转圈数在某个实际应用中,我们希望让360 度舵机旋转7 圈。
可以通过改变PWM 值来实现这一目标。
假设初始状态下舵机的PWM 值为1ms,旋转一圈需要的时间为t。
那么,旋转7 圈需要的时间为7t。
可以通过以下公式计算t:t = 65536 * (1 / 2) / (180 / 3.14)其中,65536 是PWM 值的最大值,180 是舵机旋转一圈的角度,3.14 是圆周率。
根据上述公式,可以计算出t 的值。
然后,通过改变PWM 值,使得舵机旋转7 圈。
例如,可以通过以下方式实现:- 当PWM 值为1ms 时,舵机旋转一圈;- 当PWM 值为2ms 时,舵机旋转两圈;- 当PWM 值为4ms 时,舵机旋转四圈;- 当PWM 值为8ms 时,舵机旋转八圈;- 当PWM 值为16ms 时,舵机旋转十六圈。
脉宽调制的基本原理及其应用实例

脉宽调制的基本原理及其应用实例2009-12-16 20:17:00| 分类:驱动控制| 标签:|字号大中小订阅脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
一、脉冲宽度调制基本原理随着电子技术的发展,出现了多种PWM技术,其中包括:相电压控制PWM、脉宽PWM法、随机PWM、SPWM法、线电压控制PWM等,而在镍氢电池智能充电器中采用的脉宽PWM法,它是把每一脉冲宽度均相等的脉冲列作为PWM波形,通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化。
可以通过调整PWM的周期、PWM的占空比而达到控制充电电流的目的。
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。
电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。
通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。
只要带宽足够,任何模拟值都可以使用PWM 进行编码。
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。
电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。
通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。
只要带宽足够,任何模拟值都可以使用PWM进行编码。
pwm工作原理

pwm工作原理PWM工作原理PWM(Pulse Width Modulation)是一种通过控制信号的占空比来控制电路输出的技术。
在电子设计中,PWM被广泛应用于调节电压、控制电机转速、LED亮度调节等方面。
本文将详细介绍PWM的工作原理。
一、PWM的基本概念1.1 占空比占空比是指在一个周期内,信号高电平所占的时间与整个周期时间之比。
通常用百分数表示。
例如,50%的占空比表示高电平持续时间为整个周期时间的一半。
1.2 周期周期是指信号从一个状态到另一个状态所需的时间,通常以秒为单位。
例如,100Hz的信号周期为10ms。
1.3 频率频率是指信号在单位时间内从一个状态到另一个状态的次数,通常以赫兹(Hz)为单位。
例如,100Hz的信号频率为100次/秒。
二、PWM输出原理2.1 PWM输出波形PWM输出波形是由高电平和低电平两种状态交替组成的方波信号。
其中,高电平持续时间与低电平持续时间之比即为占空比。
2.2 PWM输出控制方法在实际应用中,通过改变控制器输出引脚的电平来控制PWM输出波形。
当输出引脚为高电平时,输出信号为高电平;当输出引脚为低电平时,输出信号为低电平。
通过改变高电平和低电平持续时间的比例,可以改变PWM输出波形的占空比。
2.3 PWM输出频率PWM输出频率是由控制器内部时钟和预设参数决定的。
通常情况下,PWM输出频率越高,控制精度越高,但是也会增加系统负担。
三、PWM控制原理3.1 PWM控制器PWM控制器是一种能够产生PWM波形的芯片或模块。
它通常由计数器、比较器、触发器等模块组成。
3.2 PWM计数器PWM计数器是用来产生周期性信号的模块。
它通常由一个可编程计数寄存器和一个时钟源组成。
在每个时钟周期内,计数寄存器中的值会自动加1,并与预设值进行比较。
3.3 PWM比较器PWM比较器是用来产生占空比的模块。
它通常由一个可编程比较寄存器和一个参考信号(如DAC)组成。
在每个时钟周期结束后,计数寄存器中的值会与比较寄存器进行比较,如果计数器的值小于等于比较器的值,则输出高电平;否则输出低电平。
pwm波有效值

pwm波有效值摘要:一、引言二、PWM波的基本概念1.PWM波的定义2.PWM波的性质三、PWM波的有效值计算方法1.计算公式2.计算实例四、PWM波在实际应用中的优势1.节能2.控制精度高五、PWM波在电机控制中的应用1.电机调速2.电机驱动六、总结正文:一、引言PWM(Pulse Width Modulation,脉冲宽度调制)波是一种广泛应用于电子技术领域的信号调制方式。
在许多实际应用中,有效值(RMS value)是评估PWM波的一个重要参数。
本文将详细介绍PWM波的有效值及其计算方法,以及在实际应用中的优势和应用场景。
二、PWM波的基本概念1.PWM波的定义:PWM波是一种通过对脉冲宽度进行调制的信号,以实现对电机、照明等负载的控制。
2.PWM波的性质:PWM波具有频率高、占空比可调等特点,能够在保证较高控制精度的同时,实现节能的目的。
三、PWM波的有效值计算方法1.计算公式:PWM波的有效值可以通过以下公式进行计算:RMS = (1 / π) * ∫(t=0)^(T/2) [(1 - cos(ωt)) / 2] dt其中,T为脉冲周期,ω为角频率。
2.计算实例:假设某一PWM波的脉冲周期T为1s,角频率ω为2π rad/s,我们可以通过上述公式计算得到其有效值。
四、PWM波在实际应用中的优势1.节能:由于PWM波的占空比可以调节,因此在许多应用场景中,可以通过调节占空比来实现负载的节能。
2.控制精度高:与传统的模拟信号相比,PWM波具有更高的控制精度,能够满足高精度控制的需求。
五、PWM波在电机控制中的应用1.电机调速:通过改变PWM波的占空比,可以实现对电机转速的控制,从而达到调速的目的。
2.电机驱动:PWM波可以作为电机驱动信号,通过改变占空比,实现对电机转矩的控制,从而驱动电机。
六、总结PWM波有效值是评估PWM波的一个重要参数,通过计算可以得到。
降压型PWMDC-DC变换器

04
降压型PWMDC-DC变换器 的设计考虑
输入输出参数设计
输入电压范围
根据应用需求确定输入电压范围,以确保变换器 能够正常工作。
输出电压和电流
根据负载需求确定输出电压和电流,以满足系统 要求。
效率
优化输入输出参数设计,提高变换器的效率,减 少能量损失。
控制电路设计
01
02
03
PWM控制器
选择合适的PWM控制器, 实现输出电压和电流的稳 定调节。
宽范围输入
降压型PWMDC-DC变换器具有宽范围的输入电压适应能力 ,可以适应不同电源和负载条件下的输入电压变化。
自动调节功能
当输入电压发生变化时,降压型PWMDC-DC变换器能够自 动调节输出电压,保持稳定的输出电压。
输出电压稳定
高精度输出
降压型PWMDC-DC变换器采用高精 度电压反馈控制,能够实现高精度的 输出电压稳定。
反馈网络
设计合适的反馈网络,将 输出电压和电流信息反馈 给PWM控制器,以实现 闭环控制。
驱动电路
设计适当的驱动电路,驱 动功率开关管进行开关动 作,实现DC-DC变换。
保护电路设计
过压保护
当输出电压超过一定值时,自动切断输出,保护负载免受损坏。
过流保护
当输出电流超过一定值时,自动降低输出电压或切断输出,防止变 换器过热或损坏。
THANKS
采用SiP技术,将降压型PWMDC-DC变换器与其他相 关元器件封装在一起,形成完整的电源解决方案,提 高系统集成度。
绿色环保、可持续发展
绿色环保
采用环保材料和低能耗设计,降低降压型PWMDC-DC 变换器对环境的影响,符合绿色能源的发展趋势。
可持续发展
PWM基本原理及其应用实例
PWM基本原理及其应用实例PWM基本原理及其应用实例2009-06-26 14:12:02| 分类:嵌入式技术探索| 标签:|字号大中小订阅~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~理论篇(一)原理介绍~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,PWM控制技术正是有赖于在逆变电路中的应用,才确定了它在电力电子技术中的重要地位。
1 PWM控制的基本原理理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
面积等效原理:分别将如图1所示的电压窄脉冲加在一阶惯性环节(R-L 电路)上,如图2a所示。
其输出电流i(t)对不同窄脉冲时的响应波形如图2b所示。
从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。
脉冲越窄,各i(t)响应波形的差异也越小。
如果周期性地施加上述脉冲,则响应i(t)也是周期性的。
用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N等分,看成N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲量)相等,宽度按正弦规律变化。
SPWM波形——脉冲宽度按正弦规律变化而和正弦波等效的PWM波形。
图3 用PWM波代替正弦半波要改变等效输出正弦波幅值,按同一比例改变各脉冲宽度即可。
PWM电流波:电流型逆变电路进行PWM控制,得到的就是PWM电流波。
stc8g1k08pwm程序范例

STC8G1K08PWM程序范例1. 背景介绍STC8G1K08是一款由汇顶科技推出的单片机芯片,拥有多种功能和丰富的外设资源。
作为一款8位微控制器,STC8G1K08在嵌入式系统领域有着广泛的应用。
其中,PWM(Pulse Width Modulation)是其重要的特性之一,可以用来控制电机、LED等外围设备。
2. PWM原理PWM是一种调整脉冲信号的占空比来控制电压的技术。
在STC8G1K08中,PWM信号可以通过定时器和捕获/比较单元(TCCU)来生成。
通过调整PWM信号的占空比,可以实现对外围设备的精确控制。
3. STC8G1K08PWM程序设计下面以LED亮度调节为例,介绍如何在STC8G1K08上设计PWM程序。
3.1 硬件连接将LED连接到STC8G1K08的IO口上,通过电阻限流,确保LED电流在安全范围内。
3.2 软件设计在STC-ISP芯片编程软件评台上,新建一个工程,选择STC8G1K08芯片类型,并进行初始化设置。
3.3 编写PWM程序在主函数中,编写如下的PWM程序代码:```c#include <STC8G1K08S2.H>#define LED_PIN P1_4void m本人n(){TMOD = 0x01; // 使用定时器0模式1TH0 = 0xFA; // 设置定时器初值TL0 = 0xFA; // 设置定时器初值TR0 = 1; // 启动定时器ET0 = 1; // 开定时器0中断EA = 1; // 总中断打开while (1){// 业务代码}}void timer0() interrupt 1 // 定时器0中断服务程序{static unsigned chart = 0;t++;if t <= 50) // 50个计数形成一个脉冲周期{LED_PIN = 1; // 点亮LED}else{LED_PIN = 0; // 熄灭LEDif t >= 100) // 脉冲周期结束{t = 0; // 重新计数}}}```4. 程序原理解析上述程序使用定时器0中断来产生PWM信号。
OpenMV输出PWM占空比教科书般的指南让你成为控制大师

OpenMV输出PWM占空比教科书般的指南让你成为控制大师随着物联网技术的快速发展,对于嵌入式系统的需求也越来越高。
而PWM(Pulse Width Modulation,脉宽调制)作为一种常用的控制技术,在嵌入式系统中得到广泛应用。
本文将为你介绍OpenMV如何输出PWM占空比,并带你深入了解PWM的原理与应用。
一、PWM的原理与基本概念PWM是一种将模拟信号转换为数字信号的技术,在控制电机、LED亮度调节等领域表现出色。
它通过改变信号的脉冲宽度来控制输出的平均功率,从而达到对目标设备的精确控制。
PWM信号的两个重要参数是频率和占空比。
频率指的是每秒中PWM信号重复的次数,单位为赫兹(Hz)。
占空比则表示高电平存在的时间(宽度)与一个周期的比例。
例如,占空比为50%的PWM信号意味着高电平在一个周期中持续50%的时间。
二、OpenMV中PWM输出的配置OpenMV是一款基于MicroPython的嵌入式视觉开发板,具有强大的图像处理能力。
要在OpenMV上配置PWM输出,需要进行以下步骤:1. 初始化PWM对象:通过初始化函数创建一个PWM对象,指定PWM对应的引脚和相关参数,如频率和占空比。
2. 设置PWM占空比:使用`duty_cycle`方法设置PWM的占空比,范围一般为0-100。
可以根据实际需求调整占空比的大小。
3. 启动PWM:调用`enable`方法启动PWM输出,使其开始工作。
4. 停止PWM:如果需要停止PWM输出,可调用`disable`方法。
三、实例演示:OpenMV控制LED的亮度为了更好地理解和掌握OpenMV输出PWM占空比的方法,我们以控制LED的亮度为例进行演示。
假设我们将LED连接到OpenMV的引脚P2上。
首先,我们需要定义一个PWM对象,并初始化它:```pythonimport pybtim = pyb.Timer(4, freq=1000) # 创建一个计时器对象,频率为1000Hzch = tim.channel(3, pyb.Timer.PWM, pin=pyb.Pin("P2")) # 初始化PWM通道,引脚为P2```然后,我们可以通过设置`duty_cycle`方法来改变PWM的占空比,从而控制LED的亮度。
hal库单定时器pwm输入捕获

hal库单定时器pwm输入捕获【原创版】目录1.介绍 HAL 库单定时器 PWM 输入捕获2.HAL 库单定时器 PWM 输入捕获的工作原理3.HAL 库单定时器 PWM 输入捕获的应用实例4.总结正文一、介绍 HAL 库单定时器 PWM 输入捕获HAL 库是硬件抽象层(Hardware Abstraction Layer)的简称,它是一种软件接口,用于简化嵌入式系统中硬件设备的操作。
在嵌入式系统中,定时器和 PWM(脉冲宽度调制)输入捕获是常见的功能。
本文将介绍如何使用 HAL 库实现单定时器 PWM 输入捕获。
二、HAL 库单定时器 PWM 输入捕获的工作原理1.PWM 原理简介脉冲宽度调制(PWM)是一种模拟控制技术,通过改变脉冲的宽度来控制电机、伺服等设备的转速、位置等参数。
PWM 信号是周期性变化的脉冲信号,其占空比可以表示为高电平持续时间与整个周期的比值。
2.HAL 库单定时器 PWM 输入捕获原理HAL 库提供了一种简化的方式来实现 PWM 输入捕获,用户只需配置好定时器相关参数,HAL 库将自动完成 PWM 输入捕获的操作。
具体原理如下:(1)配置定时器:首先,用户需要根据需求配置好定时器的相关参数,例如:时钟源、计数器模式、预分频等。
(2)启动定时器:配置好定时器参数后,用户需要启动定时器。
此时,定时器开始工作,并将 PWM 输入信号捕获到一个缓存寄存器中。
(3)读取捕获值:定时器捕获到 PWM 信号后,用户可以通过读取缓存寄存器的值来得到 PWM 信号的占空比。
三、HAL 库单定时器 PWM 输入捕获的应用实例以下是一个使用 HAL 库实现单定时器 PWM 输入捕获的简单实例:1.首先,初始化 HAL 库并配置好定时器相关参数。
2.启动定时器,开始捕获 PWM 输入信号。
3.读取缓存寄存器中的值,得到 PWM 信号的占空比。
4.根据占空比计算电机、伺服等设备的状态,实现对其控制。
PWM的基本原理及其应用实例
PWM的基本原理及其应用实例1. PWM的基本原理脉宽调制(PWM),是一种电脉冲宽度变化的模拟调制技术。
它通过改变电信号脉冲的宽度,来传递模拟信号。
PWM的基本原理可以总结如下:•脉冲宽度调制: PWM信号的基本特点是强度恒定,即信号的幅度不变,只是脉冲的宽度发生变化。
•周期和频率: PWM信号由一个周期组成,周期是两次信号脉冲的时间间隔。
频率是每秒钟的周期数,常用单位为赫兹(Hz)。
•占空比: PWM信号的占空比是指高电平占一个周期时间的比例。
通常用百分比来表示。
•模拟信号传输: PWM信号通过改变脉冲的宽度来传输模拟信号。
脉冲宽度越宽,表示模拟信号的幅度越大;脉冲宽度越窄,表示模拟信号的幅度越小。
脉宽调制的过程中,通常使用一个可调节占空比的计时器来实现。
通过改变计时器的计数值,可以改变脉冲的周期和宽度,从而实现对PWM信号的调节。
2. PWM的应用实例PWM技术在许多领域都有广泛的应用。
以下是几个常见的应用实例:2.1 电机控制PWM技术在电机控制中起到关键作用。
通过调整PWM信号的占空比,可以控制电机的转速和转向。
具体应用如下:•电机驱动: PWM信号用于驱动直流电机、步进电机和无刷直流电机等。
通过改变PWM信号的占空比,可以控制电机的速度。
•电机方向:通过将两个PWM信号交替使用,可以控制电机的正反转。
2.2 照明控制PWM技术在照明控制中也有着广泛的应用。
通过调整PWM信号的占空比和频率,可以实现灯光的亮度和颜色调节。
具体应用如下:•LED调光: PWM信号用于调节LED灯的亮度。
通过改变PWM信号的占空比,可以调整LED灯的亮度。
•RGB灯控制: PWM信号用于控制RGB灯的颜色。
通过改变不同PWM信号的占空比,可以实现对各个颜色通道的控制。
2.3 电源变换器PWM技术在电源变换器中也有着重要的应用。
通过调整PWM信号的占空比和频率,可以实现电源的高效变换和稳定输出。
具体应用如下:•DC-DC变换器: PWM信号用于控制DC-DC变换器的输出电压。
脉宽调制电路故障分析实例
脉宽调制电路故障分析实例脉宽调制(PWM)电路是一种常见的电子电路,在各种电源控制、电机驱动、通信系统等领域得到广泛应用。
由于各种原因,PWM电路可能会出现故障。
本文将给出一个脉宽调制电路故障分析的实例。
故障描述:一个PWM电路控制一个直流马达的转速。
马达的转速可以通过改变PWM信号的占空比来调节。
最近发现马达的转速不再可调,而且始终保持在最大转速,无法停止。
故障分析:我们需要检查PWM信号的发生器部分。
这个部分可以是多种形式的,例如555定时器、微控制器等。
通过检查与PWM信号产生有关的元件和电路部分,可以判断是否存在故障。
在本例中,我们假设PWM信号的发生器是一个555定时器。
我们需要检查以下几个方面:1. 电源电压:检查555定时器的电源电压是否正常。
如果电压偏高或偏低,可能会导致马达一直处于最大转速状态。
2. 时钟信号:检查555定时器的时钟信号。
通过示波器,可以检查是否有正常的时钟信号输出。
如果没有时钟信号,可能是由于发生器损坏或外部时钟信号问题导致的。
3. 脉宽调节电压:检查555定时器的脉宽调节电压。
通过示波器或万用表,可以检查该电压是否在正常范围内。
如果脉宽调节电压不正确,可能导致占空比一直保持在最大值。
如果以上步骤都没有问题,那么故障可能是由于PWM信号的输出部分引起的。
在本例中,PWM信号通过一个晶体管放大电路驱动马达。
我们需要检查以下几个方面:1. 晶体管:检查晶体管是否正常工作。
可以通过测量晶体管的基极电压和集电极电压来判断。
如果晶体管工作不正常,可能会导致PWM信号无法正常驱动马达。
2. 马达:检查马达是否正常。
可以通过直流电压表或电流表来检查马达的电压和电流是否正常。
如果马达本身有故障,可能导致转速无法调节。
pwm 的调制频率
pwm 的调制频率【原创实用版】目录1.PWM 的概述2.PWM 的调制频率的概念3.PWM 调制频率的影响因素4.PWM 调制频率的选择原则5.PWM 调制频率的应用实例正文一、PWM 的概述脉冲宽度调制(PWM,Pulse Width Modulation)是一种在数字电路中广泛应用的技术,主要通过改变脉冲的宽度来实现对模拟信号的控制。
PWM 技术被广泛应用于电机控制、通信系统、电源管理等领域。
二、PWM 的调制频率的概念PWM 的调制频率是指在单位时间内,脉冲宽度发生变化的次数。
它是PWM 技术的一个重要参数,直接影响到 PWM 信号的稳定性和有效性。
三、PWM 调制频率的影响因素PWM 调制频率的主要影响因素有:1.系统的采样频率:采样频率越高,可以调制的 PWM 频率越高,可以实现更精确的控制。
2.处理器的运算速度:处理器的运算速度越快,可以处理的 PWM 调制频率越高。
3.PWM 信号的噪声:PWM 信号的噪声会影响 PWM 调制频率的稳定性。
四、PWM 调制频率的选择原则选择 PWM 调制频率时,需要考虑以下因素:1.确保 PWM 信号的稳定性:避免因为 PWM 信号的噪声等原因,影响PWM 调制频率的稳定性。
2.确保 PWM 信号的有效性:PWM 调制频率越高,可以实现的控制精度越高。
3.考虑系统的成本:PWM 调制频率的提高,可能需要更高的处理器运算速度和更高的采样频率,会增加系统的成本。
五、PWM 调制频率的应用实例在电机控制中,通过改变 PWM 调制频率,可以实现对电机转速的无级调速。
在通信系统中,PWM 调制频率可以用来调制信号的强度,以提高信号的传输效率。
pwm 有效电平
pwm 有效电平
摘要:
1.PWM 简介
2.PWM 有效电平的定义
3.PWM 有效电平的计算方法
4.PWM 有效电平的应用实例
5.总结
正文:
一、PWM 简介
脉宽调制(PWM,Pulse Width Modulation)是一种模拟控制技术,通过改变脉冲的宽度来控制输出电压,从而实现对电机、灯光等设备的亮度、速度等参数的调节。
在PWM 技术中,有效电平是一个重要的概念,它直接影响到调制后的输出电压。
二、PWM 有效电平的定义
PWM 有效电平是指在脉宽调制过程中,脉冲上升沿和下降沿之间的电压占空比的平均值。
简单来说,有效电平就是PWM 信号的平均电压值,用以衡量信号的强度或大小。
三、PWM 有效电平的计算方法
PWM 有效电平的计算公式为:
有效电平= (上升沿电压×上升沿时间+ 下降沿电压×下降沿时间)÷(上升沿时间+ 下降沿时间)
其中,上升沿电压和下降沿电压分别为PWM 信号的high 电平和low
电平,上升沿时间和下降沿时间分别为高电平和低电平所占的时间比例。
四、PWM 有效电平的应用实例
在实际应用中,PWM 有效电平常用于控制电机的速度、灯光的亮度等。
例如,通过对PWM 信号的有效电平进行调节,可以实现对LED 灯的亮度控制。
当有效电平较高时,LED 灯的亮度较亮;当有效电平较低时,LED 灯的亮度较暗。
五、总结
脉宽调制(PWM)是一种重要的模拟控制技术,在各种电子设备中都有广泛应用。
PWM 有效电平作为PWM 信号的一个重要参数,直接影响到调制后的输出电压。
ncp1654应用实例

ncp1654应用实例
NCP1654是一款高度集成的PWM控制器,主要应用于电源电路中。
该控制器具有高效率、高稳定性、低功耗等特点,广泛应用于电力管理、消费电子和工业自动化等领域。
以下是NCP1654应用实例:
1. 可调节直流电压转换器
该应用实例中,NCP1654被用于设计一种可调节直流电压转换器,以满足不同设备的电源需求。
这种转换器具有高效率、高稳定性,能够在不同负载情况下保持输出电压稳定。
2. 智能家居电源管理
在智能家居中,电源管理至关重要。
NCP1654控制器被用于设计一种高效、稳定的电源管理系统,能够满足各种智能设备的电源需求,同时具有低功耗和高效率的优点。
3. 工业自动化电源管理
在工业自动化领域,电源管理也是至关重要的。
NCP1654控制器被用于设计各种电源管理系统,以满足不同工业自动化设备的电源需求。
这些系统具有高效率、高稳定性和低功耗等特点。
总之,NCP1654控制器在电源电路中具有广泛的应用前景,可以满足各种设备的电源需求。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
HCS12微控制器系列教程(八)---PWM 应用实例
PWM 初始化步骤总结
1、禁止PWM PWME = 0
2、选择时钟 PWMPRCLK,PWMSCLA,PWMSCLB,PWMCLK
3、选择极性 PWMPOL
4、选择对齐方式 PWMCAE
5、选择占空比和周期 PWMDTYx, PWMPERx
6、使能PWM PWME = 1
【例程1】
程序描述:由通道PTP3口输出频率为1K,占空比为50%的方波
程序如下:
#include <hidef.h> /* common defines and macros */
#include <mc9s12dg128.h> /* derivative information */
#pragma LINK_INFO DERIVATIVE "mc9s12dg128b"
/***********初始化函数*************/
/*时钟初始化程序*/
void PLL_Init(void) //PLLCLK=2*OSCCLK*(SYNR+1)/(REFDV+1)
{ //锁相环时钟=2*16*(2+1)/(1+1)=48MHz
REFDV=1; //总线时钟=48/2=24MHz
SYNR=2;
while(!(CRGFLG&0x08));
CLKSEL=0x80; //选定锁相环时钟
}
/*PWM初始化程序*/
void PWM_Init(void)
{
PWME_PWME3=0; // Disable PWM 禁止
PWMPRCLK=0x33; // 0011 0011 A=B=24M/8=3M 时钟预分频寄存器设置 PWMSCLA=150; // SA=A/2/150=10k 时钟设置
PWMSCLB=10; // SB=B/2/10 =150k 时钟设置
PWMCLK_PCLK3=1; // PWM3-----SB时钟源的选择
PWMPOL_PPOL3=1; // Duty=High Time 极性设置,先高后低
PWMCAE_CAE3=0; // Left-aligned 对齐方式设置,左对齐 PWMCTL=0x00; // no concatenation 控制寄存器设置,不级联 PWMPER3=150; // Frequency=SB/150=1K周期寄存器设置,计数150个脉冲为1个周期
PWMDTY3=75; // Duty cycle = 50%占空比寄存器设置,高电平持续75个脉冲 PWME_PWME3=1; // Enable PWM 使能
}
/**********主函数**************/
void main(void)
{
PLL_Init();
PWM_Init();
/* put your own code here */
EnableInterrupts;
for(;;) {
} /* wait forever */
/* please make sure that you never leave this function */
}。